14. Апертурный синтез
При построении лазерных систем селекции наземных транспортных объектов с борта летательных аппаратов иногда встает задача повышения разрешающей способности бортовых систем по пространству обзора. Этим условиям отвечает лазерные системы с апертурным синтезом.
14.1. Основные соотношения
Сначала напомним основные характеристики антенной системы
(рис.14.1 )
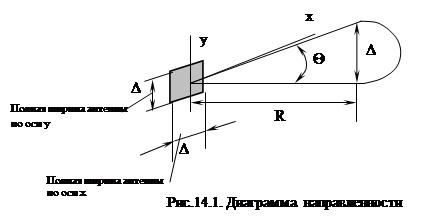 |
Предположим, что антенна представляет параболический отражатель диаметра dа мм, т.е. для рассматриваемого случая рис.14.1
![]() . (14.1)
. (14.1)
Тогда dа есть размер
(габарит) антенны и называется физическим раскрывом антенны с равномерным
распределением поля. Соответственно ![]() - называется
эффективным раскрывом антенны. На рис.14.1
значение
- называется
эффективным раскрывом антенны. На рис.14.1
значение ![]() - есть угол раскрыва или ширина диаграммы
направленности. Предельное значение
- есть угол раскрыва или ширина диаграммы
направленности. Предельное значение ![]() определяется
соотношением
определяется
соотношением
![]() . (14.2)
. (14.2)
Отсюда ![]() - называются
отношением эффективности раскрыва относительной апертурой антенны, а
- называются
отношением эффективности раскрыва относительной апертурой антенны, а
![]() (14.3)
(14.3)
-
просто апертурой антенны. Если ![]() - то указанная терминология относится к
составляющим поля антенны по оси x и y соответственно. Для обычной антенны РЛС разрешение по диаграмме направленности на
расстоянии R определяется соотношением
- то указанная терминология относится к
составляющим поля антенны по оси x и y соответственно. Для обычной антенны РЛС разрешение по диаграмме направленности на
расстоянии R определяется соотношением
 (14.4)
(14.4)
где R - расстояние до объекта ; a - размер антенны.
Например: при ![]() =1,0 м; l=0,03 м и R=1000 м значение DL равно
=1,0 м; l=0,03 м и R=1000 м значение DL равно ![]() . Для таких станций качество селекции объектов
определяется разрешающей способностью в поперечном (Dl) и продольном
направлении (DL).
. Для таких станций качество селекции объектов
определяется разрешающей способностью в поперечном (Dl) и продольном
направлении (DL).
Разрешающая способность в поперечном направлении зависит от полосы зондирующего импульса и угла места объекта (P) и зависит от используемого метода дальнометрии. Будем считать в дальнейшем, что это разрешение может быть увеличено до требуемого значения известными методами дальнометрии. Разрешающая способность в продольном направлении (азимутальная разрешающая способность) определяется размером антенной длины волны и дальностью от цели
![]() ,
(14.5)
,
(14.5)
где ![]() .
.
 |
Уменьшать DL за счет сокращения
и увеличения ![]() для бортовых
систем по ряду причин не представляется возможным. Поэтому рассмотрим в
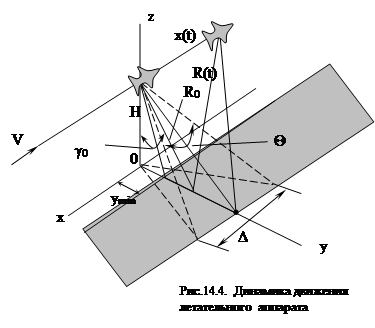
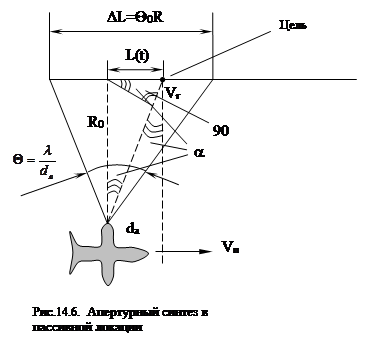
дальнейшем принципы апертурного синтеза, обеспечивающие существенное уменьшение DL. Принцип приема сигнала в динамике движения
летательного аппарата отображена на рис.14.4. Пусть излучается сигнал
для бортовых
систем по ряду причин не представляется возможным. Поэтому рассмотрим в
дальнейшем принципы апертурного синтеза, обеспечивающие существенное уменьшение DL. Принцип приема сигнала в динамике движения
летательного аппарата отображена на рис.14.4. Пусть излучается сигнал
![]() ,
(14.6)
,
(14.6)
тогда отраженный сигнал определяется как
![]() ,
(14.7)
,
(14.7)
где с точностью до постоянной составляющей
![]()
![]()
![]()
или
![]()
![]() .
.
Раскладывая, ![]() в ряд Маклорена
относительно точки t=0 имеем:
в ряд Маклорена
относительно точки t=0 имеем:
![]() . (14.8)
. (14.8)
Здесь
![]() - радиальная
скорость;
- радиальная
скорость;
![]() -радиальное
ускорение.
-радиальное
ускорение.
Тогда
![]() . (14.9)
. (14.9)
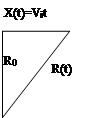
Рассмотрим это выражение подробно. Из треугольника рис.14.5, следует
![]() (14.10)
(14.10)
Отсюда ![]() и
при t=0
и
при t=0 ![]() ;
;
|
соответственно
 (14.11)
(14.11)
В этом случае:
![]() .
.
Т.к.
![]() , то для случая, когда
, то для случая, когда ![]()
![]()
Окончательно имеем
![]()
![]()
![]() ,
(14.12)
,
(14.12)
где ![]() ,
,
Таким образом, фаза огибающей отраженного сигнала изменяется во времени по квадратичному закону
![]() , (14.13)
, (14.13)
а частота во времени изменяется линейно
![]() .
(14.14)
.
(14.14)
Если W(t)=f(t)и такой сигнал пропустить через оптимальный фильтр, то на его выходе получим сжатый импульс
![]() . (14.15)
. (14.15)
Максимальное время взаимодействия измерения с точечной целью при этом равно
![]() , (14.16)
, (14.16)
тогда время сжатия можно представить
![]() .
(14.17)
.
(14.17)
Пусть якобы пройденный за это время
![]() ,
(14.18)
,
(14.18)
а синтезированный апертурный угол раскрыва антенны равен
![]() ,
(14.19)
,
(14.19)
тогда ![]() . (14.20)
. (14.20)
Т.к.
![]() , то
, то ![]() (14.21)
(14.21)
т.е. разрешение по дальности определяется физическим раскрытием антенны.
Этот метод широко используется также в пассивной локации.
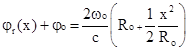
Пусть цель точечная и излучает непрерывное колебание частотой
![]() .
(14.22)
.
(14.22)
Антенна локатора работает только на
прием, а ![]() . Если скорость
Vцели=0, то время облучения цели
. Если скорость
Vцели=0, то время облучения цели
![]() .
(14.23)
.
(14.23)
Так как ![]() - радиальная
составляющая скорости носителя РЛС, под углом a к
направлению максимума диаграммы направленности. Определим частоту
Доплера
- радиальная
составляющая скорости носителя РЛС, под углом a к
направлению максимума диаграммы направленности. Определим частоту
Доплера
![]() .
(14.24)
.
(14.24)
Так как
![]() , то
, то ![]() . (14.25)
. (14.25)
Т.е. частота Доплера изменяется по линейному закону. Если такой сигнал длительностью равной времени облучения tс, пропустить через оптимальный фильтр, то на его выходе получим сжатый импульс длительностью
![]() .
(14.26)
.
(14.26)
Т.к. ![]() , то
, то ![]() .
.
За время существования короткого
импульса РЛС проходит путь ![]() . Таким образом разрешение целей составит равным
. Таким образом разрешение целей составит равным ![]() . Синтезированный угол раскрыва составит
. Синтезированный угол раскрыва составит
![]() .
.
Это эквивалентно тому, что если бы мы использовали антенну размером
![]() ,
,
что может составлять несколько километров. Таким образом разрешаемый участок DLсинт не зависит от R0 и четкость на местности получается одинаковой для малых и больших дальностей.
14.2. Пути реализации радиолокационных систем с апертурным синтезом
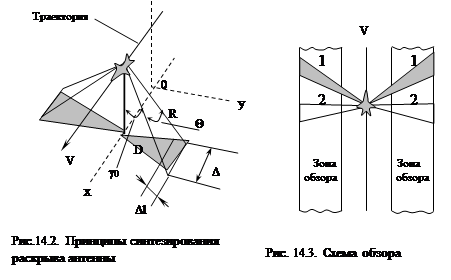
1. Оптимальная фильтрация в активных системах с апертурным синтезом. Если на входе оптимального фильтра поступает ЛЧМ сигнал от совокупности яркостных точек, разнесенных во времени более чем на величину сжатого импульса, то на выходе оптимального фильтра получим совокупность сжатых импульсов. Величина задержки этих сигналов относительно друг друга и определяет распределение их вдоль поперечной оси бокового обзора РЛС.
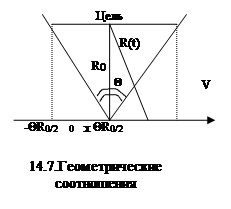 |
сигнала с учетом рис. представим как

Т.к. х << Ro , то
 ;
;
где
![]() ;
;![]()
![]()
С учетом этого найдем автокорреляционную функцию
![]() ;
;
где ![]() ,
, ![]() .
.
 ,
,
где ![]() ,
, ![]() .
.
Окончательно
и при ![]()
![]() .
.
Полагая ![]() и учитывая,
что
и учитывая,
что ![]() получим
получим
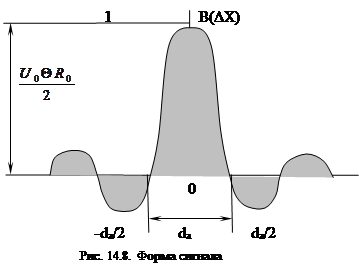 |
т.е. положение нулей корреляционной функции от максимума
отстает на величину ![]() .
.
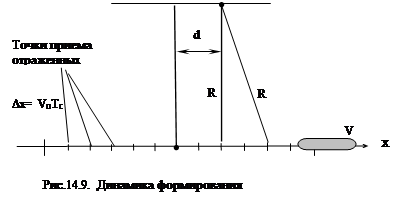
При импульсном облучении имеет место неоднозначность отсчета измерения B(DC). Так выборки сигнала на оси X не непрерывны,
а дискретны и отстают друг от друга на величину ![]() , где
, где ![]() - период и
частота следования зондирующих импульсов .
- период и
частота следования зондирующих импульсов .
![]() ,
,
Значение ![]()
запишем в виде суммы
![]() ,
,
где (2n+1) - количество точек приема; а сумма членов геометрической прогрессии равна
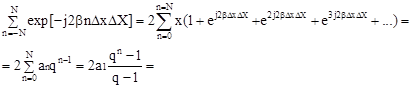
![]()
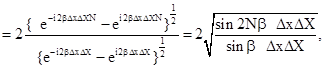
![]() .
.
Модуль функции ![]() равен
равен
![]() (14.27)
(14.27)
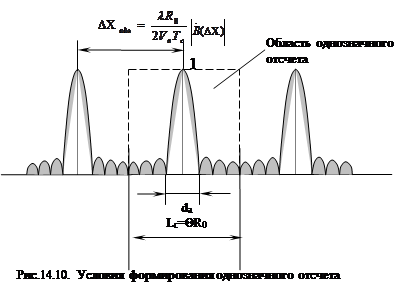 |
Положение максимумов появляется при
аргументе синуса кратном p , т.е. ![]() , отсюда
, отсюда
 .
.
Для обеспечения однозначности необходимо, чтобы диаграмма направленности антенны перекрывала участок по оси x
не больше ![]() . Иначе
. Иначе ![]() или
или ![]() , т.к.
, т.к. ![]() , то
, то ![]() , т.е. раскрыв антенны должен быть больше участка
пути, который пролетает самолет за период повторения импульсов РЛС.
, т.е. раскрыв антенны должен быть больше участка
пути, который пролетает самолет за период повторения импульсов РЛС.
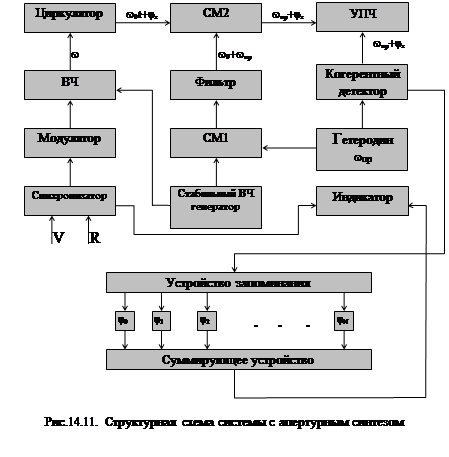
Рассмотрим структурную схему РЛС с апертурным синтезом, реализующей
корреляционный алгоритм обработки сигнала (см. ниже). Для формирования корреляционной функции введено устройство
запоминания сигналов, полученных на выходе когерентного детектора через ![]() . В качестве запоминающего устройства могут быть применены: фотопленка,
потенцалоскоп, магнитный барабан, линия задержки, цифровые элементы и др. В
данной линии задержка между отводами соответствует - Tc. Далее сигнал поступает на
фазовращатель, реализующий изменение фазы
. В качестве запоминающего устройства могут быть применены: фотопленка,
потенцалоскоп, магнитный барабан, линия задержки, цифровые элементы и др. В
данной линии задержка между отводами соответствует - Tc. Далее сигнал поступает на
фазовращатель, реализующий изменение фазы
![]() .
.
Затем эти сигналы суммируются, формируя корреляционную функцию
![]() .
.