13. Полуактивные системы
локации
Предельные возможности по
сокращению габаритно-весовых характеристик активных систем дальнометрии (СД) в
основном ограничены конкретными размерами высокочастотных трактов. Вопрос микро
миниатюризации в таких системах наиболее полно решается за счет использования
систем полуактивной дальнометрии. При этом реализуются следующие дополнительные
преимущества:
· высокая устойчивость к
пассивным помехам, обусловленная возможностью селекции сигнала по частоте
Доплера;
· невысокая стоимость системы.
Однако следует учесть и ряд
недостатков:
· отсутствие разрешающей
способности по дальности;
· худшие характеристики при
селекции сгруппированных объектов;
· определенные трудности
испытаний таких СД в приближенных условиях.
13.1. Основные соотношения
Рассмотрим
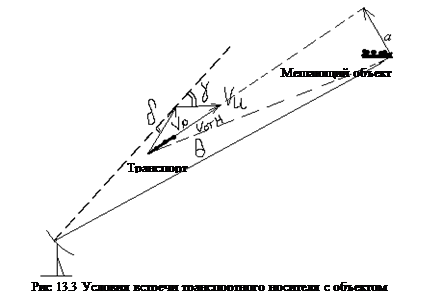
работу таких систем. Работа полуактивных СД состоит в следующем: станция
подсвета на полотне железной дороги одновременно подсвечивает объект (например,
мешающий движению ) и транспортный носитель (локомотив) с приемником, которые
находятся в пределах заданного угла облучения р .Отраженный сигнал от объекта попадает в
приемное устройство транспортного носителя(локомотива), в котором по входной информации
от станции подсвета и от объекта вырабатывается необходимая конечная, исполнительная
команда в близи объекта (рис 13.1), например, скоростное торможение.Так как
дальности регистрации относительно большие,
угол
р .Отраженный сигнал от объекта попадает в
приемное устройство транспортного носителя(локомотива), в котором по входной информации
от станции подсвета и от объекта вырабатывается необходимая конечная, исполнительная
команда в близи объекта (рис 13.1), например, скоростное торможение.Так как
дальности регистрации относительно большие,
угол  , мало изменяется во время сближения носителя с объектом, а
угол
, мало изменяется во время сближения носителя с объектом, а
угол  , по которому визируется объект, меняется существенно.
Изменение угла приводит к существенному
изменению доплеровской частоты в приёмном
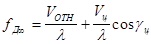
тракте системы. Для однозначного определения мешающего объекта
транспортный носитель-локомотив, должен как правило, содержать два вида антенн
(носовая-главная и кормовая побочная). При этом имеют место следующие
составляющие доплеровских частот:
, по которому визируется объект, меняется существенно.
Изменение угла приводит к существенному
изменению доплеровской частоты в приёмном
тракте системы. Для однозначного определения мешающего объекта
транспортный носитель-локомотив, должен как правило, содержать два вида антенн
(носовая-главная и кормовая побочная). При этом имеют место следующие
составляющие доплеровских частот:
 - при относительном движении «транспортный
носитель-фиксируемый мешающий объект»;
- при относительном движении «транспортный
носитель-фиксируемый мешающий объект»;
 - при относительном перемещении станции радио
подсвета (РПЦ) и объекта;
- при относительном перемещении станции радио
подсвета (РПЦ) и объекта;
 - при относительном движении РПЦ и ЖД носителя (рис.13.1). С учетом (рис.13.1)
имеем:
- при относительном движении РПЦ и ЖД носителя (рис.13.1). С учетом (рис.13.1)
имеем:
 (13.1.),
(13.1.),  (13.2.)
(13.2.)
 (13.3.)
(13.3.)
|
|
|
Рис.13.1. Принцип
работы полуактивных СД
|
|
Частота, принятая антеннами, равна:

Частота, принятая кормовой антенной соответственно
может быть определена:
 . (13.4)
. (13.4)
Чтобы получить информацию  нужно
сравнить отраженный сигнал, приходящий на основную антенну транспортного носителя,
с сигналами кормовой антенны носителя.
нужно
сравнить отраженный сигнал, приходящий на основную антенну транспортного носителя,
с сигналами кормовой антенны носителя.

Учитывая широкий диапазон изменения доплеровских
частот  , обусловленных изменением углов
, обусловленных изменением углов  и
и  ( изменением угла
( изменением угла  пренебрегаем),
высокий уровень сигнала, падающий в приёмный тракт через задние лепестки
приёмной антенны, использование классической схемы построения весьма
ограничено.
пренебрегаем),
высокий уровень сигнала, падающий в приёмный тракт через задние лепестки
приёмной антенны, использование классической схемы построения весьма
ограничено.
Можно использовать существенно меньшую полосу пропускания,
но при этом необходима настройка селектирующего фильтра на частоту отраженного
сигнала объекта по информации о скорости.
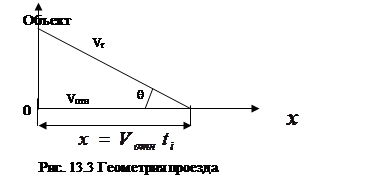
Будем считать, что исследуемый
точечный, мешающий объект неподвижен, а приемник, установленный на
транспорте перемещения, движется мимо его со скоростью . Геометрия проезда поезда мимо мешающего объекта
представлена на (рис. 13.2), где
. Геометрия проезда поезда мимо мешающего объекта
представлена на (рис. 13.2), где  - проекция на линию «носитель-объект», а – промах, тогда воспользуемся
формулой 13.1.), для систем полуактивной
локации он равен:
- проекция на линию «носитель-объект», а – промах, тогда воспользуемся
формулой 13.1.), для систем полуактивной
локации он равен:
 (13.5)
(13.5)
где  ,
,  .
.
Выразим угол пролета  через параметры
движения (рис. 13.2).
через параметры
движения (рис. 13.2).
 , (13.6)
, (13.6)
 - момент наблюдения.
- момент наблюдения.
При подстановке
13.6.) в выражение (13.1.)
получаем,

Воспользуемся другим определением  .
.
 .
.
В этом случае при подстановке получаем,
 . (13.7)
. (13.7)
Таким образом, доплеровский сигнал модулирован по
частоте. Выставляя исполнительный фильтр на определенном значении  , можно гарантировать прохождение через него отраженного
сигнала. При этом положение
, можно гарантировать прохождение через него отраженного
сигнала. При этом положение  на оси
частот корректируется информацией
с земли о векторе
на оси
частот корректируется информацией
с земли о векторе  и
и  . При расширении полосы согласованного по и доплеровского фильтра,
увеличивается разрешение по промаху проезда . Поэтому в системах
используют два фильтра. В первом широкополосном, настроенном на большое
удаление транспортного носителя и объекта
. При расширении полосы согласованного по и доплеровского фильтра,
увеличивается разрешение по промаху проезда . Поэтому в системах
используют два фильтра. В первом широкополосном, настроенном на большое
удаление транспортного носителя и объекта  определяется . Во втором узкополосном, положение которого на оси частот
фиксируется по информации с первого фильтра, определяется момент выполнения
конечной команды.
определяется . Во втором узкополосном, положение которого на оси частот
фиксируется по информации с первого фильтра, определяется момент выполнения
конечной команды.
|
|
  |
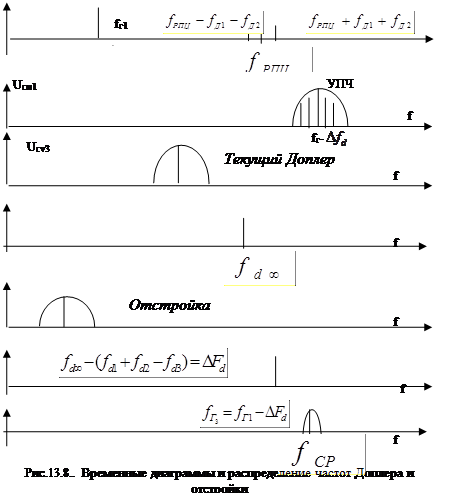
В
большинстве случаев, в полуактивных систем используется частотная селекция с
фиксацией порогового значения доплеровских частот сигнала от объекта, отсчитываемых
от значения доплеровской частоты этого сигнала на большом удалении носителя от
объекта Момент регстрации обьекта системой определяется вхождением спектра
разностного сигнала в узкополосный фильтр, с требуемой величиной отстройки.
Значение доплеровской частоты на большом удалении транспортного носителя
приемника- целевой обьект обозначим  ; и легко находится, если учесть, что при этом
; и легко находится, если учесть, что при этом  , тогда
, тогда  , в этом случае,
, в этом случае,
 . (13.9)
. (13.9)
Тогда
значение доплеровской частоты, отсчитанное от ее значения на «бесконечности»
(величина отстройки), будет равна:

 . (13.10)
. (13.10)
Отсюда следует условие срабатывания:
 . (13.11)
. (13.11)
 - угол подхода транспортного носителя к
объекту, при котором происходит регистрации
объекта (например мешающего движению);
- угол подхода транспортного носителя к
объекту, при котором происходит регистрации
объекта (например мешающего движению);  положение фильтра доплеровских частот, при регистрации,
например постороннего обьекта.
положение фильтра доплеровских частот, при регистрации,
например постороннего обьекта.
Принцип
фиксации объекта в такой системы и характер изменения текущего значения  проследим по графику
(рис.13.4) , построенному с учетом представленных зависимостей. Очевидно, имея
информацию о
проследим по графику
(рис.13.4) , построенному с учетом представленных зависимостей. Очевидно, имея
информацию о  , и принимая, что
, и принимая, что  , мы можем фиксировать момент появления
, мы можем фиксировать момент появления  по значению частоты
Доплера. На минимальной дальности отстройка
по значению частоты
Доплера. На минимальной дальности отстройка 
 и
и  . Исходя из условий обеспечения максимума эффективности
регистрации объекта, срабатывание системы производят на углах, например,
. Исходя из условий обеспечения максимума эффективности
регистрации объекта, срабатывание системы производят на углах, например,  .
.
От эксперимента к эксперименту изменяется. Поэтому
положение  с полосой
с полосой  изменяется в каждом
случае по информации о , т. о. В этом случае требуется априорная оценка
изменяется в каждом
случае по информации о , т. о. В этом случае требуется априорная оценка  отстройки.
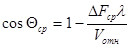
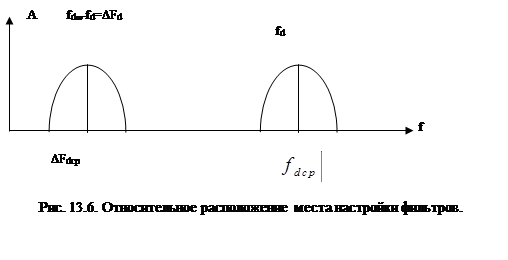
Относительное расположение места
настройки фильтров для указанного способа селекции цели предоставлено на
(рис.13.5) . Очевидно, что на частоте труднее реализовать требуемую
крутизну фильтра и его избирательность из-за относительно малой добротности.
отстройки.
Относительное расположение места
настройки фильтров для указанного способа селекции цели предоставлено на
(рис.13.5) . Очевидно, что на частоте труднее реализовать требуемую
крутизну фильтра и его избирательность из-за относительно малой добротности.
 (13.12)
(13.12)
DFdср
- при измерении частоты Доплера с учетом
отстройки,  при непосредственном измерении частоты Доплера. Указанный
недостаток устраняется при измерении по отстройке, что
является одним из существенных преимуществ этого метода. Алгоритмы работы полуактивной системы с
отстройкой рассмотрим на конкретных примерах построения зарубежных систем
при непосредственном измерении частоты Доплера. Указанный
недостаток устраняется при измерении по отстройке, что
является одним из существенных преимуществ этого метода. Алгоритмы работы полуактивной системы с
отстройкой рассмотрим на конкретных примерах построения зарубежных систем











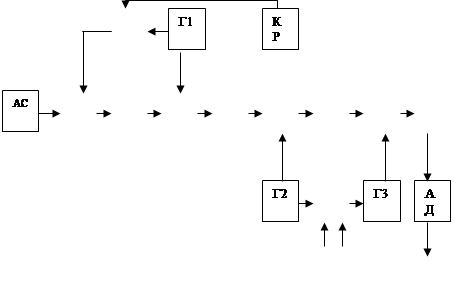
Рис.13.7. Блок-схема
полуактивной системы с отстройкой
где, АС - антенная система; См1 -- смеситель; 1. УПЧ -
усилитель промежуточной частоты; См2 - смеситель 2; См3 -
смеситель 3; Г1 -
гетеродин 1; УДЧ1 – усилитель доплеровской частоты 1; КА -
кормовая антенна транспортного носителя; См4 - смеситель 4; УДЧ2 -
усилитель доплеровской частоты 2; См5 - смеситель 5;. УПФ -
узкополосный фильтр; Г2 - гетеродин 2; СРП - станция радио подсвета;
Г3 -
гетеродин 3; АД -
амплитудный детектор; ИУ - исполнительное устройство.
Работа
схемы состоит в следующем (рис. 13.7). Сигнал, отраженный от цели, поступает на
смеситель 1 , а сигнал от кормовой антенны транспортного носителя  подается в
начале на смеситель 2 и далее на смеситель 1. В результате на выходе
смесителей выделяется результирующее колебание разностной частоты сигнала и смесителя 2,
которое, усиливаясь в усилителе промежуточной частоты (УПЧ) подается на смеситель 3.
подается в
начале на смеситель 2 и далее на смеситель 1. В результате на выходе
смесителей выделяется результирующее колебание разностной частоты сигнала и смесителя 2,
которое, усиливаясь в усилителе промежуточной частоты (УПЧ) подается на смеситель 3.
 . (13.13)
. (13.13)
Введение смесителя в усиление сигнала на
промежуточной частоте  позволяет избавиться
от транспортных виброшумов системы и
соответственно реализовать максимально-возможную чувствительность. В смесителе 3 отфильтровывается
составляющая сигнала гетеродина (
позволяет избавиться
от транспортных виброшумов системы и
соответственно реализовать максимально-возможную чувствительность. В смесителе 3 отфильтровывается
составляющая сигнала гетеродина ( )
)
 . (13.14)
. (13.14)
Сигнал с выхода смесителя
3 , характеризующий текущее значение частоты Доплера, после усиление в
избирательном широкополосном усилителе доплеровской частоты (УДЧ1) поступает на
смеситель 4. Задача смесителя 4
состоит в выделении частоты отстройки.
Отстройка
от  осуществляется с
помощью опорного генератора 2, запоминающего по информации с СРП,
т. е.
осуществляется с
помощью опорного генератора 2, запоминающего по информации с СРП,
т. е.  . Поэтому на выходе смесителя
4 имеем:
. Поэтому на выходе смесителя
4 имеем:
 (13.15)
(13.15)
где  текущее значение отстройки. Сигнал с выхода смесителя 4 поступает на усилитель
(УДЧ2), полоса которого выбрана из условия пропускания всего диапазона доплеровских
частот
текущее значение отстройки. Сигнал с выхода смесителя 4 поступает на усилитель
(УДЧ2), полоса которого выбрана из условия пропускания всего диапазона доплеровских
частот  (с учетом возможных
условий встречи транспортного носителя с мешающим объектом). Последующая задача
схемы обработки состоит в выделении узкого диапазона доплеровских частот, соответствующих заданной
отстройки срабатывания
(с учетом возможных
условий встречи транспортного носителя с мешающим объектом). Последующая задача
схемы обработки состоит в выделении узкого диапазона доплеровских частот, соответствующих заданной
отстройки срабатывания  , за счет использования информации с СРП о векторе
, за счет использования информации с СРП о векторе  и . Так как перестройка доплеровского фильтра в широком
интервале возможных частот обрабатывания
и . Так как перестройка доплеровского фильтра в широком
интервале возможных частот обрабатывания  является
технически трудно выполнимой задачей, то выделение момента срабатывания производят
путем фиксированной настройки контура срабатывания на определенную частоту, а
условную его отстройку осуществляют за счет изменения частоты гетеродина 3.Процесс перестройки производится
смесителем 3. При этом частота гетеродина равна
является
технически трудно выполнимой задачей, то выделение момента срабатывания производят
путем фиксированной настройки контура срабатывания на определенную частоту, а
условную его отстройку осуществляют за счет изменения частоты гетеродина 3.Процесс перестройки производится
смесителем 3. При этом частота гетеродина равна
|
|
 |
где,  – средне значение частоты упреждения настройки узкополосного
фильтра.
– средне значение частоты упреждения настройки узкополосного
фильтра.  В этом случае, когда сигнал текущей отстройки
В этом случае, когда сигнал текущей отстройки  появится в
узкополосном фильтре:
появится в
узкополосном фильтре:  , где,
, где,  – полоса
узкополосного фильтра срабатывания, на выходе амплитудного детектора
вырабатывается импульс для запуска наполнительного устройства.
– полоса
узкополосного фильтра срабатывания, на выходе амплитудного детектора
вырабатывается импульс для запуска наполнительного устройства.
Временные диаграммы и спектральное
распределение частот Доплера и отстройки приведены на рис. 13.8. Селекция цели
в данном варианте осуществляется при широких диаграммах направленности приемных
антенн СД.
Недостатком
такой системы является:
1. Неудовлетворительная помехоустойчивость к
действию активных помех (например, сварка).
2. Ограниченная возможность работы по
группированным мешающим объектам и при догонных курсах.
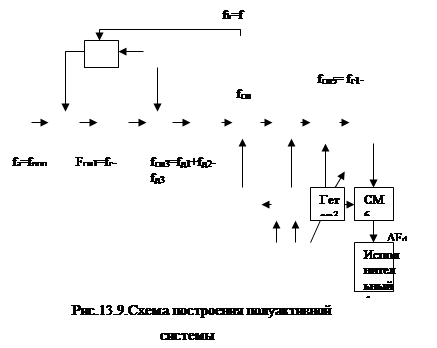
Поэтому широкое применение находят полуактивные
системы с узкой диаграммой направленности 13.9.

.
Момент регистрации определяется СРП путем задержки
инициирующего импульса оконечного устройства на величину соответствующую
условию реализации максимальной эффективности работы полуактивной системы. В данной схеме можно ввести перестройку УДЧ
по информации о векторе  , сократив его полосу. Но при этом схема обработки
сигнала и СРП значительно усложняется.
Наиболее целесообразно на выходе УДЧ установить ряд фильтров, порядок
включения которых задается СРП.
, сократив его полосу. Но при этом схема обработки
сигнала и СРП значительно усложняется.
Наиболее целесообразно на выходе УДЧ установить ряд фильтров, порядок
включения которых задается СРП.
Значительный
диапазон изменений эффективности площади отражения объекта,  в такой системе может
привести к ложным срабатываниям системы по боковым лепесткам.
в такой системе может
привести к ложным срабатываниям системы по боковым лепесткам.
Компромиссным решением в такой ситуации является
одновременное использование схем обработки, как по первому варианту построения,
так и по второму.















13.2. Устойчивость
полуактивных
систем
Для оценки устойчивости ранее рассмотренного
варианта построения СД к пассивным помехам установим местонахождение спектра
доплеровских частот. При прохождении однородного облака пассивных помех имеет
место следующая закономерность
 ,
, ,
,  . (13.16)
. (13.16)
Тогда отстройку от пассивных помех найдем как
 . (13.17)
. (13.17)
В большинстве случаев выполняется условие
 .
(13.18)
.
(13.18)
Для подтверждения полученного соотношения рассмотрим
практический пример. Если  ,
,  , то при определенных исходных параметрах имеем
, то при определенных исходных параметрах имеем  ,
,  .
.
Диаграммы направленности при фазовой пеленгации.
Таким
образом, при отстройке фильтра  возможна селекция
мешающего объекта на фоне пассивных помех. Оценим преимущество полуактивных СД
с отстройкой по сравнению с активным доплеровскими СД , для которого
возможна селекция
мешающего объекта на фоне пассивных помех. Оценим преимущество полуактивных СД
с отстройкой по сравнению с активным доплеровскими СД , для которого
 ,
,
 .
.
Таким
образом, чем выше , тем в более широком диапазоне условий встреч можно
устранить ложное срабатывание. Полуактивные СД обладает более высокой
помехоустойчивостью к действию пассивных
помех по сравнению с активным доплеровскими системами , так как вероятность
перекрытия доплеровских спектров цели и помехи в ней существенно меньше , чем у
активных за счет использования информации в  . Графические условия перекрытий спектров полуактивных СД
приведены на (рис.13.10). Условие перекрытия спектров сигнала определяется
следующим соотношением
. Графические условия перекрытий спектров полуактивных СД
приведены на (рис.13.10). Условие перекрытия спектров сигнала определяется
следующим соотношением
 или
или
 . (13.19)
. (13.19)
Поэтому
 , а
, а  (13.20)
(13.20)