12.Высокочастотные методы
локации
12.1. Измерение скорости и
пройденного
пути
Радарная
технология в настоящее время все больше используется на железнодорожном
подвижном составе для измерения скорости и пройденного пути. Радарные
устройства для бесконтактного измерения этих важных величин внедряются в
системы управления тяговым приводом и обеспечения безопасности движения
поездов. Система управления тягой и торможением с защитой от буксования и юза
не всегда может получать сигналы от какой-либо оси, так как в настоящее время
практически нет свободных осей для установки дополнительных датчиков. Радар
зачастую является единственной альтернативой. При этом требуется особая
точность сигнала скорости, высокая надежность и достаточная динамическая
чувствительность радарного устройства. Хорошо известный доплеровский эффект
может быть использован в измерениях скорости и пройденного пути. Излучаемые
радаром волны отражаются от движущегося объекта со смещением частоты и попадают
в приемник. Получаемая при этом разностная частота определяет скорость движения
объекта, что видно из уравнения (формулы Доплера)
 , (12.1 )
, (12.1 )
где v - скорость подвижного состава в направлении
распространения волн, l - длина волны микроволнового излучателя, q - главный угол излучения антенны
по отношению к направлению движения. Интегрируя выражения для скорости,
получают пройденный путь. Один период доплеровских колебаний с частотой
24.125ГГц и углом излучения 35° соответствует прохождению отрезка пути длиной
8мм. Суммируя число колебаний (аналогично суммированию импульсов колесного
датчика), получают величину пройденного пути. По сравнению со звуковыми и
световыми волнами колебания микроволнового диапазона наиболее удобны для
измерения скорости и пути, пройденного поездом. На практике приходится иметь
дело не с одной строго определенной частотой, а с относительно широким спектром
частот, подчиняющимся распределению Гаусса. Кроме того, доплеровские сигналы
сильно модулированы по амплитуде и фазе. Форму спектра можно определить, если
исследовать влияние фиксированного угла раскрытия антенны и отражательной
способности основания. Доплеровская частота имеет максимальное значение при горизонтальном
излучении, так как в этом случае cosq близок к 1. В то же время величина отраженной
энергии уменьшается пропорционально квадрату расстояния от отражающей
поверхности, поэтому для получения сигнала достаточного уровня нужно увеличить
угол излучения по отношению к горизонтали. На практике его берут в пределах 35 - 70° к горизонтали. При этом доплеровское
смещение составляет 35 - 80%.
Обычно на практике используют диапазон
сантиметровых волн 24.125 ГГц (К-диапазон), несмотря на то,
что более высокие частоты обеспечивают повышенную точность и позволяют работать
с компактными антенными модулями. Однако для работы в диапазонах частот 61.25 и
76.5 ГГц, которые также допустимы, в настоящее время еще нет приемопередатчиков
приемлемой стоимости. Но в ближайшем будущем можно рассчитывать на появление
таких относительно дешевых устройств, работающих в диапазоне 76.5 ГГц,
поскольку они нашли применение на автомобильном транспорте.
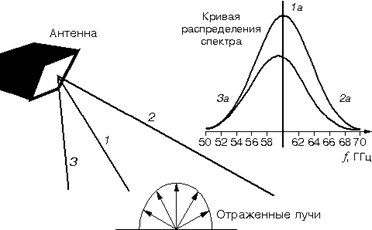
Рис.12.1. Доплеровский
измеритель скорости
Угол излучения наиболее
используемых антенн лежит в пределах от ± 3° до ± 30° относительно главного
направления излучения. Разброс угла излучения относительно его основного
значения приводит к уширению полосы доплеровского рассеяния. Схематически это
представлено на рис.12.1. Луч 1
отображен в центре кривой распределения доплеровского спектра. Пологий луч 2 дает сигнал, смещенный к более высоким
частотам, а луч 3 - к низким. Величина и
качество отраженного сигнала, попадающего на антенну, в большой степени зависят
от характеристики поверхности, отражающей сигнал.
Для того чтобы не было полного зеркального отражения,
когда угол падения равен углу отражения, поверхность должна обладать
определенной минимальной шероховатостью r,
чтобы часть излучения вернулась к антенне. При этом действует следующий критерий:
 . (12.2)
. (12.2)
На длине волны l = 1.25 см (частота 24,125ГГц) и q = 45° шероховатость должна быть не менее 2
мм. Это условие хорошо выполняется на пути со щебеночным балластом. В этом
случае основание может быть представлено в виде излучателя Ламберта, где отраженная
энергия пропорциональна косинусу угла падения. В диапазоне обычно используемых
углов раскрытия антенны амплитуду можно считать практически независимой от
направления распространения. В этом случае говорят об изотропном отражении. Несколько
иная картина на пути с гладким бетонным основанием. Когда шероховатость
поверхности приближается к предельной, характеристика направленности становится
более выраженной, а амплитуда отраженного излучения явно зависимой от угла
падения. Эта зависимость может быть описана в виде функции основания U(q) или U(v). В случае изотропного отражения из геометрии
лепестка направленности антенны получают спектр I. При отражении, зависящем от угла, действительна функция UII, при умножении которой на
составляющие спектра I получается
спектр II. Еще сложнее ситуация на
пути с металлическими шпалами, имеющими скошенные стенки. В этом случае функция
основания имеет ярко выраженный максимум.
12.2.
Контроль проскальзывания колес
локомотива
Классическими устройствами для измерения
пути и скорости являются колесные датчики. В результате вращения колеса они вырабатывают
импульсы или напряжение, по величине пропорциональные частоте вращения. Они отличаются
высокой надежностью, но имеют ряд недостатков. Наиболее характерные ¾ неизбежность погрешности
измерений при юзе и буксовании (рис.12.2 и 12.3), а также необходимость
периодической дополнительной калибровки по мере износа бандажей колес. Виляние
колесной пары также приводит к снижению точности измерения пройденного пути.
Специфические особенности радарной технологии менее известны. На 95%
протяженности железнодорожных линий, где она внедрена, скорость и пройденный
путь измеряются с высокой точностью и надежностью (погрешность < 0,5%). При
этом на результаты измерения не воздействуют процессы юза, боксования и виляния
колесных пар, а также износ колес.
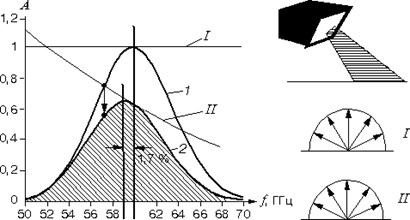
Рис.12.2. Оценка сигнала по
изменению центра тяжести спектра:
I- характеристика основания UI
(изотропное отражение); II- характеристика основания UII (анизотропное
отражение); 1- доплеровский спектр основания UI;2- доплеровский спектр
основания UII; А- относительная амплитуда; f- частота
В то же время на остальных
5% протяженности линий в силу ряда причин, обусловленных физикой процесса
измерений, погрешность последних может возрастать до 1%. При особо неблагоприятных
условиях может происходить дальнейшее снижение точности вплоть до полного
исчезновения сигнала. В связи с этим радарные системы должны иметь резерв,
например в виде колесного датчика. Менее опасно, чем крайне редкое полное
исчезновение сигнала, снижение точности измерений, связанное с изменениями
характеристик пути. Этот нежелательный эффект в большей или меньшей степени
проявляется в зависимости от способа оценки сигналов.
Простейшим способом оценки отраженного
сигнала является определение центра тяжести доплеровского спектра. С помощью аналоговой
схемы или эквивалентного ей цифрового метода в нужном частотном диапазоне
определяют центр тяжести плоскости, в которой лежит доплеровский спектр. Путем
умножения на соответствующий поправочный коэффициент получают скорость подвижного
состава. Этот метод широко распространен в качестве базового для исследований в
автомобильной промышленности. На автомобильных дорогах достигается точность
измерения скорости ±1% и выше.
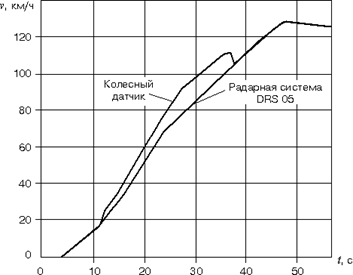
Рис.12.3.Отображение кривой
скорости при проскальзывании колес в
процесс разгона поезда: v- скорость; t- время
На железнодорожном подвижном
составе с учетом резких изменений основания пути и многообразия вариантов
верхнего строения пути точность измерения скорости с помощью этого метода может
быть лишь в пределах ±2%. В отличие от случайного распределения элементарных
отражателей на автомобильной полосе, на железнодорожной линии их расположение в
основном упорядочено. При изменении упоминавшейся ранее функции основания
меняется и доплеровский спектр, что сопровождается изменением его центра
тяжести. Отсюда следует, что при изменении отражательной способности основания
в пределах угла раскрытия антенны изменяется и поправочный коэффициент,
используемый для определения скорости. Одной из возможностей повышения стабильности
сигнала является использование антенны с более узкой диаграммой направленности,
т.е. с меньшим углом излучения.
Однако этот
способ имеет два серьезных недостатка: при постоянной частоте для более узкой
диаграммы направленности требуется гораздо большая площадь антенны, что
является ограничением для использования на железнодорожном подвижном составе,
так как зачастую места под кузовом недостаточно; площадь основания, облучаемая
антенной, мала. В результате возрастает вероятность того, что в зоне стрелочных
переводов значительная часть энергии, излученной антенной, будет отражена
поверхностью катания рельсов. В связи с этим будет часто исчезать сигнал
скорости, что для системы означает увеличение объема работ по корректировке ошибок.
Для получения надежного сигнала скорости величина облучаемой площади не должна
быть меньше установленной. Из-за сложной структуры устройств радарной системы
задавать величину погрешности в процентном выражении невозможно и нецелесообразно.
Вместо этого должно быть задано несколько параметров. Значения их зависят от
области использования системы. Для регулирования тягового привода требуется
сигнал скорости с возможно меньшим смещением во времени по отношению к первичному
сигналу, а для измерения пройденного пути эта величина не имеет такого большого
значения.
Один из источников ошибок при обработке
данных связан с тем, что при определении погрешности измерения скорости
используют для всего ее диапазона величину ошибки, относящуюся лишь к
наибольшей скорости. В нижнем диапазоне скорости при этом вполне могут
возникать погрешности в несколько процентов. Одним из самых больших преимуществ
радарной технологии измерений является незначительная зависимость от
температуры. Единственным параметром, входящим в уравнение (12.1), который зависит
от температуры, является частота микроволнового излучения. За счет внутренней
компенсации в схеме измерения остаточное отклонение составляет 0,004%, что практически
не оказывает влияния на точность измерений. В диапазоне стандартных углов
излучения небольшая угловая погрешность порядка 1° приводит к смещению
масштабного множителя на 1.5%. Это должно учитываться при установке и
калибровке. На рельсовом подвижном составе этот угол настолько мал, что в такой
компенсации нет необходимости. Возвратно-поступательные и поперечные колебания
подвижного состава оказывают лишь незначительное воздействие на измеряемый
сигнал.
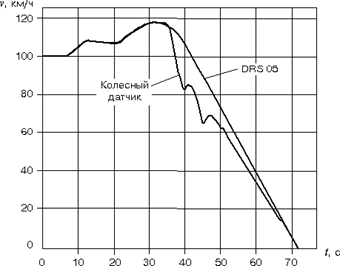
Рис.12.4. Кривые скорости при
проскальзывании колес
в процессе торможения
Вследствие стохастического
распределения отражателей на основании железнодорожного полотна на доплеровский
сигнал накладываются шумы, характер распределения которых близок к кривой
Гаусса. Форма этой кривой показывает, что статистическая погрешность не имеет
значения для измерения пути, так как она исчезает, когда рассматриваются
усредненные значения времени. На величину статистической погрешности можно в
определенных пределах воздействовать путем обработки сигнала, изменяя
постоянные времени используемых фильтров нижних частот. Эта величина примерно
обратно пропорциональна задержке сигнала. При обработке сигналов методом оценки
точек пересечения погрешность теоретически должна обращаться в нуль. На
практике же имеет место остаточная ошибка порядка 0.5%, так как согласно теории
обработки сигналов точка пересечения не может быть определена с максимальной
степенью точности в произвольно короткое время. Таким образом, необходим
компромисс между точностью измерения и динамикой сигнала. С другой стороны,
следует учитывать, что при экстремально резких изменениях амплитуды сигнала
процесс его обработки имеет конечную, крайне ограниченную длительность. В связи
с этим требуется учитывать кратковременные смещения поправочного коэффициента,
которые могут достигать 1%. Колебания поправочного коэффициента относятся как к
сигналам скорости, так и к сигналам пути, но они не оказывают влияния на
воспроизводимость результатов измерений.
В радарной технологии измерений возможны
ситуации, когда энергия отраженного сигнала недостаточна для обработки и сигнал
временно исчезает. На практике различают две основные причины этого явления:
поезд движется по пути с основанием, которое слишком сильно отражает сигнал или
совсем не отражает; сильная увлажненность антенн или чрезмерное количество воды
в промежутке между антеннами и основанием. Первую причину можно в значительной
мере устранить соответствующим выбором положения антенн. Что касается второй
причины, то полевые испытания доказали устойчивость работы системы даже при
сильном дожде. Точность измерений не снизилась, когда между рельсами был слой
воды в несколько сантиметров. Известно, что чрезмерное количество снега в
зазоре между антенной и основанием может вызвать исчезновение сигнала на несколько
секунд. Правила эксплуатации допускают наличие определенного количества сухого
снега или льда на антеннах. Однако при дальнейшем накоплении льда неизбежно
поглощение сигнала. Удаляют лед различными способами, в том числе и путем
обдува антенны горячим воздухом. Неизбежные при эксплуатации отложения грязи и
пыли от тормозных колодок не являются помехой для работы антенн. Поскольку на
практике кратковременные исчезновения сигнала неизбежны, радарные системы
должны распознавать их. Кроме того, в систему передается сигнал встроенного
датчика ускорений, который вместе с колесным датчиком может служить в качестве
резерва. Затраты времени на прохождение отраженного сигнала от антенны к
системе, а также на его обработку являются причиной его некоторого запаздывания.
В режиме постоянной скорости это не играет роли, но при движении с ускорением
или замедлением погрешности измерения скорости становятся заметными.
12.3.
СВЧ-система измерения скорости
проскальзывания
В железнодорожном транспорте для устранения процессов
боксования и юза необходимо измерять неконтактным путем, в динамике, линейную
скорость или обороты колеса, управляемого двигателем электровоза. Динамический
диапазон измерений скорости находится в пределах 0.1 - 50 м/с. Такая система
определения скорости должна работать в сложных условиях: интервал рабочих от -60 до
+60 0С; влажность 100% при температуре 75 0С; виброудары
<2000g; вибрационная
перегрузка до 3 кГц с амплитудой до 5мм; пыль, туман, песочные, снежные бури с
плотностью до 4 м-1. Прибор должен быть изготовлен в
герметизированном корпусе, залит специальным компаундом и приняты другие
защитные меры для предотвращения ударов и вибрационных перегрузок. Доплеровский
метод измерения скорости в микроволновом диапазоне длин волн, так как он наименее
подвержен влиянию естественных помех (пыль, грязь, влага, снег). Недостатками
таких радиотехнических систем является наличие относительно широких диаграмм
направленности и наличие боковых лепестков антенных систем. Для устранения этих
недостатков необходимо перейти в миллиметровый диапазон длин волн.
Одним из основных вопросов селекции
доплеровских сигналов в решении данной проблемы является возможность их
выделения на фоне активных (искрение несущих силовых токопроводов и другие
промышленные помехи) и пассивных помех – пыль, грязь, снег и т.п. Эти вопросы
решаются путем выбора соответствующего энергетического потенциала системы и
специально принятых конструктивных мер, т.е. использования относительно большой
мощности излучения передатчика при заданной пороговой чувствительности
приемника. А также расположением антенны системы в непосредственной близости от
вала, соединяющих оба колеса, или непосредственно у колеса, а также
оригинальными методами выделения гармонической спектральной доплеровской составляющей
из помех по максимальной амплитуде
полезного сигнала и другим отличительным признакам (введение следящего
узкополосного фильтра, быстрого преобразования Фурье, цифровой фильтрации). При
анализе систем измерения скорости рассматриваются варианты их построения как с
измерением скорости относительно ведомой пары колеса, нити рельса и др., так и
с анализом приращения скорости во времени, т.е. путем измерения ускорения.
Предполагается, что выход такой системы сопряжен с портом R232 персонального компьютера (или
специального процессора) и будет разработан соответствующий программный продукт
для отображения текущей информации во времени и выдачей установленных
заказчиком команд в цифровом виде на пункт управления.
12.3.1.
Методы выделения доплеровского сигнала.
Пусть излучаемый сигнал мощностью  , где: P0 - типовое значение мощности;
, где: P0 - типовое значение мощности;  - частота световых колебаний;
- частота световых колебаний; - начальная фаза. Тогда отраженный сигнал
можно представить:
- начальная фаза. Тогда отраженный сигнал
можно представить:
 , (12.3)
, (12.3)
где k1 - коэффициент, учитывающий потери сигнала при
прохождении его в среде распространения, при отражении от объекта и т.д.; - фазовый сдвиг оптических колебаний при
отражении от объекта;
- фазовый сдвиг оптических колебаний при
отражении от объекта; - задержка сигнала, где R(t) - текущее значение дальности до объекта.
Разложим R(t) в ряд Тейлора, тогда
- задержка сигнала, где R(t) - текущее значение дальности до объекта.
Разложим R(t) в ряд Тейлора, тогда ; где R0 - точка схватывания объекта;
; где R0 - точка схватывания объекта;  - радиальная скорость сближения точки вала
колеса и доплеровского датчика;
- радиальная скорость сближения точки вала
колеса и доплеровского датчика;  - ускорение объекта. Для линейного перемещения
можно ограничиться двумя членами ряда. В этом случае:
- ускорение объекта. Для линейного перемещения
можно ограничиться двумя членами ряда. В этом случае:
 (12.4)
(12.4)
где
 ;
;
или  ,
, 
Смешивание излученного и отраженного сигналов и
выделение доплеровской составляющей можно осуществить двояко: за счет применения
детекторов с нелинейным эффектом детектирования; когерентного сложения
отраженного и излученного сигналов. Для первого случая сигнал на выходе
нелинейного детектора равен
 (12.5)
(12.5)
Выделяя фильтром разностную НЧ составляющую, получим
 . (12.6)
. (12.6)
Частота доплеровского
сигнала на выходе фильтра определяется радиальной скоростью и для  при
при  находится в пределах
находится в пределах . Информация о радиальной скорости рассчитывается по данным
измерения частоты Доплера
. Информация о радиальной скорости рассчитывается по данным
измерения частоты Доплера  . Отсюда найдем погрешность измерения :
. Отсюда найдем погрешность измерения :  , где
, где  - стабильность длины волны излучения [м];
- стабильность длины волны излучения [м];  - погрешность измерения длины волны доплеровского
сигнала [Гц].
- погрешность измерения длины волны доплеровского
сигнала [Гц].
Очевидно,
что непрерывный режим излучения и приема сигнала позволяет получить наибольшую
точность регистрации радиальной скорости. Из рассмотренного примера следует,
что реализация  в основном ограничена
погрешностью измерения частоты Доплера
в основном ограничена
погрешностью измерения частоты Доплера  , которая определяется эффектом расширения спектра частоты
Доплера (~100 Гц ), обусловленным турбулентностью атмосферы. Доплеровский
спектр сигнала, отраженного от аэрозольной среды и от объекта из-за различия
радиальных скоростей перемещения отдельных слоев атмосферы и объекта разнесены
по оси частот. Если селектируется скоростной сигнал, то частота Доплера в
отраженном сигнале во много раз превышает спектр частоты Доплера для
аэрозольной среды. Кроме того, что спектры сигналов помехи и исследуемого
колеса разнесены по частоте, они существенно отличаются по амплитуде. Учитывая,
что колесо как металл для излучающей системы представляет зеркальный отражатель,
то амплитуда полезного сигнала во много раз будет больше сигнала отраженного от
аэрозольной помехи (пыль, песок, мелкий гравий и т.д.). Этот признак может быть
положен в основу селекции объектов на фоне аэрозольных помех. Таким образом,
для обеспечения помехозащищенности таких систем достаточно ввести доплеровскую
селекцию. Очевидно, что для измерения частоты Доплера в условиях отсутствия
априорной информации о радиальной скорости необходим адаптивный узкополосный
фильтр, обеспечивающий необходимую высокую избирательность полезного сигнала.
, которая определяется эффектом расширения спектра частоты
Доплера (~100 Гц ), обусловленным турбулентностью атмосферы. Доплеровский
спектр сигнала, отраженного от аэрозольной среды и от объекта из-за различия
радиальных скоростей перемещения отдельных слоев атмосферы и объекта разнесены
по оси частот. Если селектируется скоростной сигнал, то частота Доплера в
отраженном сигнале во много раз превышает спектр частоты Доплера для
аэрозольной среды. Кроме того, что спектры сигналов помехи и исследуемого
колеса разнесены по частоте, они существенно отличаются по амплитуде. Учитывая,
что колесо как металл для излучающей системы представляет зеркальный отражатель,
то амплитуда полезного сигнала во много раз будет больше сигнала отраженного от
аэрозольной помехи (пыль, песок, мелкий гравий и т.д.). Этот признак может быть
положен в основу селекции объектов на фоне аэрозольных помех. Таким образом,
для обеспечения помехозащищенности таких систем достаточно ввести доплеровскую
селекцию. Очевидно, что для измерения частоты Доплера в условиях отсутствия
априорной информации о радиальной скорости необходим адаптивный узкополосный
фильтр, обеспечивающий необходимую высокую избирательность полезного сигнала.
Однако на
высоких доплеровских частотах из-за ограничений по добротности нельзя получить
узкополосную селекцию доплеровского сигнала. Например, при использовании
контура с добротностью  нужно получить полосу
нужно получить полосу
Dfдоп = fдоп/2Q = 62.5кГц
т.е.  . Учитывая значение стабильности при минимуме значения
частоты Доплера можно отметить, что для обеспечения
. Учитывая значение стабильности при минимуме значения
частоты Доплера можно отметить, что для обеспечения  необходимы
высокодобротные фильтры, которые реализуют свои возможности при относительно
низких частотах. Предлагается в систему ввести гетеродинирование, операцию, в
которой за счет введения перестраиваемого гетеродина осуществляется поиск и перенос
ВЧ сигнала в другую область с последующей узкополосной фильтрацией в кварцевом
фильтре и восстановлением исходной частоты без потери фазовых соотношений. На
выходе кварцевого фильтра за время перестройки гетеродина формируется сигнал промежуточной
частоты
необходимы
высокодобротные фильтры, которые реализуют свои возможности при относительно
низких частотах. Предлагается в систему ввести гетеродинирование, операцию, в
которой за счет введения перестраиваемого гетеродина осуществляется поиск и перенос
ВЧ сигнала в другую область с последующей узкополосной фильтрацией в кварцевом
фильтре и восстановлением исходной частоты без потери фазовых соотношений. На
выходе кварцевого фильтра за время перестройки гетеродина формируется сигнал промежуточной
частоты  , модулированный по амплитуде огибающей спектра входного
сигнала. При достижении максимума огибающей сигнала на выходе кварцевого
фильтра происходит остановка гетеродина. В этом случае входной доплеровский
сигнал преобразуется в промежуточную частоту , но уже с полосой, выделенной относительно центральной
частоты
, модулированный по амплитуде огибающей спектра входного
сигнала. При достижении максимума огибающей сигнала на выходе кварцевого
фильтра происходит остановка гетеродина. В этом случае входной доплеровский
сигнал преобразуется в промежуточную частоту , но уже с полосой, выделенной относительно центральной
частоты , равной
, равной  . Далее сигнал поступает на смеситель2, где восстанавливается
исходная частота ,
но уже с узкой полосой спектра, равной Df2=
. Далее сигнал поступает на смеситель2, где восстанавливается
исходная частота ,
но уже с узкой полосой спектра, равной Df2= 2. С выхода УДЧ сигнал поступает на частотомер
который фиксирует искомую частоту Доплера. Представленная схема
гетеродинирования за счет введения двух смесителей устраняет влияние
нестабильности частоты гетеродина на погрешность измерения собственной
доплеровской частоты колеса
2. С выхода УДЧ сигнал поступает на частотомер
который фиксирует искомую частоту Доплера. Представленная схема
гетеродинирования за счет введения двух смесителей устраняет влияние
нестабильности частоты гетеродина на погрешность измерения собственной
доплеровской частоты колеса  . Операция снижения полосы имеет и свои ограничения,
связанные с увеличением инерционности системы
. Операция снижения полосы имеет и свои ограничения,
связанные с увеличением инерционности системы  , что обусловлено соответствующим временем становления
сигнала на выходе узкополосного фильтра. Так, сужение полосы кварцевого
генератора до 20 Гц приводит к тому, что амплитуда на выходе такого фильтра
достигает своего номинала только через
, что обусловлено соответствующим временем становления
сигнала на выходе узкополосного фильтра. Так, сужение полосы кварцевого
генератора до 20 Гц приводит к тому, что амплитуда на выходе такого фильтра
достигает своего номинала только через  . Поэтому скорость перестройки частоты гетеродина должна быть
менее чем
. Поэтому скорость перестройки частоты гетеродина должна быть
менее чем
Dfпром/Тинерсистемы@20Гц/0,05с=400 Гц/с.
Очевидно,
что при селекции скоростных объектов требования по инерционности комплекса
являются основополагающими при выборе полосы кварцевого фильтра:
 .
.
Кроме того, при выборе полосы доплеровского сигнала
необходимо, как будет показано в дальнейших разделах, учитывать изменение
частоты Доплера в процессе относительного перемещения объект- измеритель скорости. Особенно это
проявляется при широких диаграммах направленности антенны измерителя скорости.
Поступающие одновременно от двух источников сигналы
 (12.7)
(12.7)
поступают на смеситель где проводится их когерентное сложение

. (12.8)
(12.8)
Используя фильтрацию можно ограничиться разностной
частотой высокочастотного сигнала. Отсюда устраняя (за счет фильтрации)
высокочастотную составляющую фазы  , а также пренебрегая постоянной составляющей, обусловленной
ВЧ набегом
, а также пренебрегая постоянной составляющей, обусловленной
ВЧ набегом получим основополагающее уравнение измерения дальности по
фазовому соотношению между сигналами двух частот j(t) =
получим основополагающее уравнение измерения дальности по
фазовому соотношению между сигналами двух частот j(t) = =
= ,(1) где Dw - разнос частот.
Раскрывая R(t)=R0 -Vrt
,(1) где Dw - разнос частот.
Раскрывая R(t)=R0 -Vrt
 =2А1
=2А1 А2[cos
А2[cos
 [
[ )]. (12.9)
)]. (12.9)
низкочастотной составляющей имеем
j(t) =  -
- .
(12.10)
.
(12.10)
Здесь первый член это постоянный фазовый набег, получаемый
в точке схватывания сигнала – R0, а второй член определяется
фазовым набегом, связанным с перемещением объекта относительно точки схватывания
с радиальной скоростью Vr.
А как результат общий фазовый набег характеризует расстояние
между датчиком и объектом. Задача оценки мгновенной частоты решается в случае
представления отраженного доплеровского сигнала в комплексном виде с
последующим разложением в виде двух
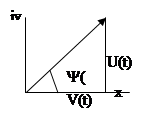
Рис.12.5.Векторное
разложение сигнала на
квадратурные составляющие
квадратурных составляющих (пару ортогональных сигналов).
 ,(12.11)
,(12.11)
где  ,
,
где Y(t)=W0t+j(t);
 ;
; . (12.12)
. (12.12)
Мгновенная частота такого сигнала,
определенная как производная его полной фазы по времени, (измеренное значение) равна
 . (12.13)
. (12.13)
Здесь значение частоты W0 равно удвоенной частоте
Доплера равно 2Wd,
что определяется схемой построения измерителя. Отсюда можно предположить, что
как минимум по двум выборкам ортогональных (квадратурных) составляющих,
проведенных в одни и те же моменты и интервалы времени, можно найти приращение
тангенса (определить при малых временных интервалах выборок его производную) и,
соответственно, вычислить частоту W0 i®W0.
Быстродействующая микропроцессорная техника и аналого-цифровое
преобразование позволяет отойти от привычных оценок частоты как величины,
обратной периоду изменения сигнала или как величины, равной отношению числа периодов к интервалу времени, на
котором подсчитывается это число и перейти
к оценкам частоты как производной
фазы во времени. Возможность получения в этом случае большого числа отсчетов на
одном периоде изменений сигнала позволяет за счет статистической обработки получить
более точные оценки мгновенной частоты. Большинство применяемых в настоящее
время способов, кроме отмеченного наипростейшего, используют быстрое
преобразование Фурье (БПФ) или оценки, связанные с преобразованием
Вигнера–Келли. Для рассмотренного простого алгоритма имеем
W0i(t) , (12.14)
, (12.14)
или  .
.
Таким образом представленные решения позволяют по мгновенным выборкам
определить параметры доплеровского сигнала, значение вектора, т.е. амплитуду
результирующего сигнала и положение вектора по фазовому соотношению. А
как результат общий фазовый набег характеризует расстояние между датчиком и
объектом. Задача оценки мгновенной частоты решается в случае представления
отраженного доплеровского сигнала в комплексном виде с последующим разложением
в виде двух. Основной
принцип построения такой доплеровской системы состоит в том, что ее рупорная антенна
с СВЧ блоком располагается вблизи вала, соединяющего оба колеса, а само устройство обработки рапологается на виброгасящей арматуре или крепится внутри
вагона либо на балке, прикрепленной к платформе
вагона. Так как локомотив существенно тяжелее вагонов, то высокочастотными
вибрациями можно пренебречь. Амплитуда вибраций должна быть небольшой и
достаточной для устранения вибрационных помех за счет использования
виброгасящих специальных амортизаторов (виброгасящая арматура) и специальной заливки
блока.
12.4.
Двухканальная схема построения
доплеровского измерителя.
Для
устранения влияния бортовых вибраций локомотива должна измеряться относительная
скорость вращения ведущего колеса относительно ведомового, или относительно
скорости перемещения платформы вагона по отношению к нити рельса. Такая
процедура измерений позволяет более точно отследить процесс боксования и юза. В
рассматриваемой доплеровской системе это решается следующим образом. Антенна
облучает одновременно колесо и нить железнодорожного полотна. Так как
металлическая нить железнодорожного полотна и колесо локомотива для СВЧ
диапазона является зеркальными «точками» отражения, то принимаемая от них
энергия будет существенно больше отражений от грунта полотна и шпал, а
доплеровские составляющие будут отличаться на постоянную величину плюс
изменяющаяся компонента боксования и юза (проскальзывания). Это приводит к
некоторому усложнению схемы обработки. При этом необходимо отслеживать следящими
фильтрами две частоты. Сущность процесса измерений сводится к следующему: на
валы ведущих колес локомотива накладывается и закрепляется диэлектрическим
хомутом бандаж в виде радиопоглощающего покрытия для выбранного диапазона длин
волн. Для устранения взаимного влияния отражателей (полуволновых вибраторов)
последние углубляются в радиопоглощающее устройство. При этом должна быть
выбрана зона облучения радиопоглощающего покрытия (проекции сечения луча
антенны на покрытие) так, чтобы оно должно быть меньше расстояния между
полуволновыми вибраторами. Для обеспечения помехоустойчивости измерительной системы
последняя должна работать в импульсном режиме работы, и с такой частотой, чтобы
от каждого вибратора иметь пакет импульсов. Если учесть, что амплитуда и период
отраженного сигнала относительно постоянны во времени, то процесс измерения
скорости и ускорения можно проводить за каждый пакет (выборку) от каждого
вибратора с последующим усреднением измеряемых параметров по всему обороту.
Например, пусть линейная скорость вала 50 м/с. Число оборотов вала (колеса) w = V\R= 50\02 = 200 об\сек. Период
оборота Т =1\w= 5 мсек. При N=10
полуволновых вибраторов, то время выборки (приема) отраженного сигнала составит
tw = Т\N = 5\10 = 500 мкс. Если мы
хотим анализировать в выборке n = 100 импульсов, тогда
период повторения зондирующих импульсов должен быть порядка Dt = tw\n = 5 мс, или частота следования fc = 200 Гц. Такой режим работы передатчика
обеспечивают лавинно – пролетные диоды СВЧ излучения.
|
|
 |
Структурная схема высокоточного
бесконтактного тахометрического СВЧ измерителя скорости вала (колеса) приведена
на рис.12.6. Помехоустойчивость в данной схеме достигается большой мощностью
излучения, значительным загрублением чувствительности, введением операции
стробирования, внесение частотно-избирательного подсчета числа импульсов
пакете.