Введение
Элементы важной и интересной области математики- теория приближения
функций. Под приближением функции понимают замену по определенному правилу
одной функции другой, близкой к исходной в том или ином смысле. Практическая
необходимость в такой замене возникает в самых различных ситуациях, когда
данную функцию необходимо заменить более простой и удобной для вычислений,
восстановить функциональную зависимость по экспериментальным данным, и т.п.
Основоположником теории аппроксимации функций является великий русский
математик Пафнутий Львович Чебышев (1821-1894).
В качестве приближающих функций выбирают чаще всего алгебраические
и тригонометрические многочлены. Так же важное значение имеет метод наилучшего
приближения, предложенный Чебышевым. Он возник из решения практических задач,
связанных с конструированием прямолинейно направляющих шарнирных механизмов.
Такие механизмы в XIX
веке использовались в паровых машинах- основных универсальных двигателях того
времени- для поддержания прямолинейного движения поршневого штока. К ним
относятся параллелограмм Уатта и некоторые его разновидности.
На дальнейшее развитие этой теории оказало влияние открытие,
сделанное в конце XIX
века немецким математиком Карлом Вейерштрассом. Им была доказана принципиальная
возможность приближения произвольной непрерывной функции с любой заданной
степенью точности алгебраическим многочленом, что явилось второй причиной
применения этих многочленов как универсального средства приближения функций, с
заданной сколь угодно малой ошибкой.
Кроме алгебраических многочленов, другим средством приближения
функций являются тригонометрические многочлены, значение которых в современной
математике, конечно, не исчерпывается указанной ролью.
I. Постановка основной задачи аппроксимации
Основную задачу теории аппроксимации можно сформулировать следующим
образом: на некотором точечном множестве  в пространстве
произвольного числа измерений заданы 2 функции f(P) и F(P,A1,A2...An)
от точки P
в пространстве
произвольного числа измерений заданы 2 функции f(P) и F(P,A1,A2...An)
от точки P , из которых вторая зависит ещё от некоторого числа
параметров А1,А2...Аn; эти параметры требуется
определить так, чтобы уклонение в функции F(P,A1,A2...An)
от функции f(P) было
наименьшим. При этом, конечно, должно быть указано, что понимают под уклонением
F от f или, как ещё принято говорить, под
расстоянием между F и f.
, из которых вторая зависит ещё от некоторого числа
параметров А1,А2...Аn; эти параметры требуется
определить так, чтобы уклонение в функции F(P,A1,A2...An)
от функции f(P) было
наименьшим. При этом, конечно, должно быть указано, что понимают под уклонением
F от f или, как ещё принято говорить, под
расстоянием между F и f.
Если, например, рассматриваются ограниченные функции, то в качестве
расстояния между двумя функциями можно взять верхнюю грань в модуля их разности.
При таком определении расстояния для совокупности всех ограниченных в функций оказываются
справедливыми многие соотношения, которые мы имеем для точек обычного
3х-мерного пространства.
Последнее обстоятельство, с которым постоянно приходится
сталкиваться в математике при рассмотрении других классов функций и многих иных
совокупностей (множеств), привело к созданию весьма важного понятия
метрического пространства, так что при дальнейшем изложении совокупность - это метрическое, либо Гильбертово
пространство.
1.1. Основная теорема аппроксимации линейном нормированном
пространстве
Пусть Е- произвольное нормированное пространство, пусть g1,g2...gn-
n линейно- независимых элементов из Е. Основную задачу аппроксимации
применительно к рассматриваемому нами “линейному случаю” можно сформулировать
следующим образом: дан элемент х Е, требуется определить числа
Е, требуется определить числа  ,
, ...
... так, чтобы величина
так, чтобы величина  получила наименьшее
значение.
получила наименьшее
значение.
Докажем, что требуемые значения чисел  существуют.
существуют.
Предварительно заметим, что  - есть непрерывная функция своих аргументов. Действительно, в
силу неравенства треугольника
- есть непрерывная функция своих аргументов. Действительно, в
силу неравенства треугольника :
:

Введём теперь вторую непрерывную функцию:

На “сфере”  , которая является ограниченным замкнутым множеством точек в n-мерном конечном Евклидовом
пространстве, функция
, которая является ограниченным замкнутым множеством точек в n-мерном конечном Евклидовом
пространстве, функция  по известной теореме
Вейерштрасса имеет некоторый минимум
по известной теореме
Вейерштрасса имеет некоторый минимум  .
.
Неотрицательное число не может равняться 0,
так как векторы g1,g2...gn
линейно независимы. Так же  . Обозначим
. Обозначим  (
( )- нижняя грань значения функций
)- нижняя грань значения функций  . Если
. Если
 , то
, то

Желая найти минимум функции , мы можем ограничиться рассмотрением только значений  , для которых
, для которых  , т.е. рассмотрением функции в ограниченной
замкнутой области, а в такой области непрерывная функция имеет минимум.
, т.е. рассмотрением функции в ограниченной
замкнутой области, а в такой области непрерывная функция имеет минимум.
Итак, существование линейной комбинации  , дающей наилучшую аппроксимацию элемента х, доказано.
, дающей наилучшую аппроксимацию элемента х, доказано.
Строго нормированное пространство.
Возникает вопрос, когда выражение  , дающее наилучшую аппроксимацию элемента х, будет
единственным для
, дающее наилучшую аппроксимацию элемента х, будет
единственным для  ?
?
Указанная единственность во всяком случае имеет место тогда, когда
пространство Е строго нормировано, т.е. когда в неравенстве  ,
, знак “=” достигается
только при
знак “=” достигается
только при  ,
, .
.
В самом деле, допуская, что пространство Е строго нормировано,
предположим, что элемент х имеет два выражения:  и
и  наилучшего
приближения, причём g1,g2...gn
линейно независимы.
наилучшего
приближения, причём g1,g2...gn
линейно независимы.
 где, как легко видеть,
можно принять, что
где, как легко видеть,
можно принять, что  и, поскольку
и, поскольку
 , то
, то
 , и, значит,
, и, значит,
Следовательно, в силу строгой нормированности пространства:  .
.
В этом соотношении  должно =1, т.к. в противном
случае элемент х был бы линейной комбинацией элементов g1,g2...gn и, значит, было
бы
должно =1, т.к. в противном
случае элемент х был бы линейной комбинацией элементов g1,g2...gn и, значит, было
бы  . Но если
. Но если  , то
, то
 и, значит,
и, значит,  , т.к. элементы g1,g2...gn линейно независимы.
Таким образом, рассматриваемые выражения- тождественны.
, т.к. элементы g1,g2...gn линейно независимы.
Таким образом, рассматриваемые выражения- тождественны.
Примером строго нормированного пространства является пространство
Н, а также Lp при
р>1, но пространства
С и L не являются
строго нормированными.
Действительно, возьмём интервал [-1,1] и две линейно независимые функции x(t) и y(t)  , модули которых принимают свои максимальные значения
в одной и той же точке интервала, причём arg x()=arg y().
, модули которых принимают свои максимальные значения
в одной и той же точке интервала, причём arg x()=arg y().
Тогда очевидно,  . Чтобы доказать, что не есть строго нормированное пространство, достаточно взять x(t)=1, при
. Чтобы доказать, что не есть строго нормированное пространство, достаточно взять x(t)=1, при  и x(t)=0, при t<0
,а y(t)=1-x(t).
и x(t)=0, при t<0
,а y(t)=1-x(t).
Геометрическая интерпретация.
Проблема, существование решения которой мы ранее доказали,
допускает полезную геометрическую интерпретацию. Действительно, совокупность точек
вида  , где зафиксированные элементы g1,g2...gn
, где зафиксированные элементы g1,g2...gn  линейно
независимы, а
линейно
независимы, а  пробегают всевозможные
комплексные числа, представляют некоторое линейное многообразие
пробегают всевозможные
комплексные числа, представляют некоторое линейное многообразие  в том смысле, что из
в том смысле, что из  следует, что
следует, что  при произвольных
комплексных
при произвольных
комплексных  . Это линейное многообразие, очевидно, является
пространством, так как оно содержит точку 0. При n=1 мы получаем “прямую”; при n=2- “плоскость”, а вообще- “n- мерную плоскость”.
. Это линейное многообразие, очевидно, является
пространством, так как оно содержит точку 0. При n=1 мы получаем “прямую”; при n=2- “плоскость”, а вообще- “n- мерную плоскость”.
Наша проблема, таким образом, состояла в нахождении точки
конечномерного подпространства G
пространства E, которая от заданной точки х находится на
кратчайшем расстоянии (в метрике пространства Е). Мы доказали, что такая точка
в G существует.
Если само пространство Е не является конечномерным, т.е. если в нём
имеется сколько угодно линейно независимых между собой векторов, то Е содержит
бесконечномерные подпространства. Пусть G- такое подпространство.
Возникает вопрос, существует ли в G точка, наименее удалённая от заданной
точки  . Заметим, если пространство Е строго нормировано, то в G во всяком случае не может
существовать более одной точки, наименее удалённой от данной точки .
. Заметим, если пространство Е строго нормировано, то в G во всяком случае не может
существовать более одной точки, наименее удалённой от данной точки .
1.2. Теоремы аппроксимации в пространстве Н.
Пусть G-
некоторое подпространство пространства Гильберта Н, и пусть точка x - точка, не принадлежит G. Если в G существует точка y, наименее удалённая от x, то вектор x-y ортогонален к каждому вектору g из G, т.е. (x-y, g)=0,
- точка, не принадлежит G. Если в G существует точка y, наименее удалённая от x, то вектор x-y ортогонален к каждому вектору g из G, т.е. (x-y, g)=0,  . Чтобы доказать это утверждение, предположим, что в G существует вектор f, для которого
. Чтобы доказать это утверждение, предположим, что в G существует вектор f, для которого  , и рассмотрим вектор
, и рассмотрим вектор  .
.
Имеем  и, значит:
и, значит:  , а это противоречит предположению, что y-
есть наименее удалённая точка от x подпространства G.
Вектор y из G, обладающий тем свойством,
что разность x-y
ортогональна к G,
естественно назвать проекцией x
на G.
, а это противоречит предположению, что y-
есть наименее удалённая точка от x подпространства G.
Вектор y из G, обладающий тем свойством,
что разность x-y
ортогональна к G,
естественно назвать проекцией x
на G.
В этом случае, когда подпространство конечномерно и образовано
линейно независимыми векторами g1,g2...gn,
мы можем, пользуясь доказанными предложениями, фактически найти вектор y=, наименее уклоняющийся от вектора x. Действительно, вектор y- есть проекция x на G и, значит, он должен удовлетворять
уравнениям:
 (k=1,2...n) (1), которые в подробной
записи имеют вид:
(k=1,2...n) (1), которые в подробной
записи имеют вид:
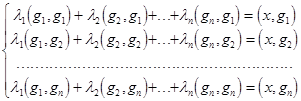 (2)
(2)
и представляют систему линейных уравнений, для нахождения
коэффициентов  .
.
Детерминант этой системы, т.е.
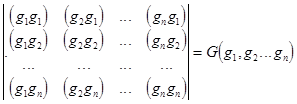 ,
,
носит название детерминанта Грама системы векторов g1,g2...gn.
Так как пространство Н
строго нормировано, а векторы gi
линейно независимы, то при любом векторе x система (2) имеет одно и только одно
решение. Отсюда вытекает, что детерминант Грама линейно независимых векторов
всегда отличен от нуля.
Найдём ещё выражение для квадрата погрешности, с которой вектор y аппроксимирует вектор x, т.е. для величины 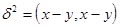 .
.
В силу (1), имеем равенство
 или
или
 .
.
Присоединяя это уравнение к системе (2) и исключая , найдём, что
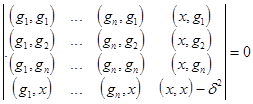 , откуда
, откуда  .
.
Итак, мы нашли:  (3)
(3)
Из этого соотношения, и из того, что G(g1)=(g1,g1)>0
 вытекает, что
детерминант Грама всегда больше либо равен нулю, причём он обращается в нуль
тогда и только тогда, если между векторами есть линейная зависимость (в
частности, если один из векторов равен нулю).
вытекает, что
детерминант Грама всегда больше либо равен нулю, причём он обращается в нуль
тогда и только тогда, если между векторами есть линейная зависимость (в
частности, если один из векторов равен нулю).
1.3. Первая теорема Вейерштрасса.
Мы рассмотрели теорему аппроксимации в произвольном линейном
нормированным пространстве Е. Теперь рассмотрим пример линейного нормированного
пространства- пространство С.
Пространство С: совокупность всех непрерывных функций x=x(P) от точки Р в
ограниченном замкнутом множестве обычного пространства
любого числа измерений- это есть линейное нормированное пространство.
Из теоремы в применении к пространству вытекает следующий факт:
пусть f(x)- непрерывная
функция в конечном интервале [a,b];
тогда при любом n существует
полином  , который среди полиномов n-й степени наименее уклоняется от f(x), в том смысле, что
, который среди полиномов n-й степени наименее уклоняется от f(x), в том смысле, что  , где Qn(x)-
произвольный полином n-й
степени. Ясно, что
, где Qn(x)-
произвольный полином n-й
степени. Ясно, что  .
.
Теперь докажем, что  при
при  . Это утверждение и составляет содержание теоремы
Вейерштрасса (1885), которая гласит:
. Это утверждение и составляет содержание теоремы
Вейерштрасса (1885), которая гласит:
если f(x) непрерывна
в конечном замкнутом интервале [a,b],
то всякому  можно сопоставить
полином Pn(x) степени
n=n(
можно сопоставить
полином Pn(x) степени
n=n( ), для которого во всём интервале [a,b] имеет место неравенство
), для которого во всём интервале [a,b] имеет место неравенство
 .
.
Не нарушая общности, примем, что а=0, b=1. Приведём доказательство
С.П.Бернштейна.
Для этого построим полином  ,
,  и докажем, что
равномерно во всём интервале [0,1]
и докажем, что
равномерно во всём интервале [0,1]
 . Напишем тождества:
. Напишем тождества:
 (1);
(1);  ;
;
 , из которых последите два получаются дифференцированием по р
соотношения:
, из которых последите два получаются дифференцированием по р
соотношения:
 . Из написанных тождеств вытекает, что
. Из написанных тождеств вытекает, что  (2).
(2).
Умножая (1) на f(x)
и отнимая Bn(x),
получим, что
 , где суммирование в
, где суммирование в  распространено на те
значения к, для которых
распространено на те
значения к, для которых  , а суммирование в
, а суммирование в  - на остальные значения к.
- на остальные значения к.
Так как f(x) непрерывна
в замкнутом интервале [0,1],
и, значит, ограничена:  во всём этом интервале,
то
во всём этом интервале,
то 
А это выражение на основании (2):  , с другой стороны,
, с другой стороны, , где
, где  , и, значит,
, и, значит,  при .
при .
Окончательно:  , что и доказывает теорему Вейерштрасса.
, что и доказывает теорему Вейерштрасса.
Заметим, что если Pn(x)
равномерно стремится к f(x)
при , то f(x) разлагается
в равномерно сходящийся ряд.

Поэтому т. Вейерштрасса состоит так же в том, что всякая
непрерывная в конечном интервале [a,b] функция f(x)
может быть разложена в равномерно сходящийся при  ряд, члены которого-
полиномы.
ряд, члены которого-
полиномы.
1.4. Вторая теорема Вейерштрасса.
Она относится к периодическим непрерывным функциям:
Если F(t)-
непрерывная функция с периодом 2 , то каково бы ни было число , существует тригонометрическая сумма
, то каково бы ни было число , существует тригонометрическая сумма  , n=n(), которая для всех t удовлетворяет неравенству:
, n=n(), которая для всех t удовлетворяет неравенству:
 .
.