Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
можно
изучать три
независимых
плоских угловых
движения, что
мы и сделаем
в системе, т.е.:
 (3.4)
(3.4)
получено
три независимых
уравнения.
Закон управления
формируется
путем сложения
позиционного
сигнала j
и скоростного
сигнала j,
умноженного
на коэффициент
усиления kj
(j=x,
y, z):
 .
(3.5)
.
(3.5)
Усложним
рассматриваемую
модель. Для
этого будем
рассматривать
ее как упругое
тело [1, 3, 6-12]. Уравнения
осцилляторов
для упругой
модели имеет
вид:
 (3.6)
(3.6)
где
 -
коэффициент
демпфирования
для каждой
отдельно взятой
гармоники.
-
коэффициент
демпфирования
для каждой
отдельно взятой
гармоники.
 - квадрат собственной
частоты не
демпфированных
колебаний для
каждой гармоники.
- квадрат собственной
частоты не
демпфированных
колебаний для
каждой гармоники.
 -
управляющий
момент с учетом
возможного
отказа. i
= 1,2,3,4. Коэффициенты
-
управляющий
момент с учетом
возможного
отказа. i
= 1,2,3,4. Коэффициенты
 мы берем из
таблицы, приведенной
в приложении
А.
мы берем из
таблицы, приведенной
в приложении
А.
При нулевой
правой части,
мы получаем
свободные
колебания,
зависящие от
начальных
отклонений,
угловых скоростей
и др. При ненулевой
правой части
мы получаем
вынужденные
колебания,
которые накладываются
на свободные
колебания. Они
являются затухающими
со временем,
в силу коэффициента
демпфирования.
Прототипом
для данной
упругой модели
послужил маятник
на пружинке.
Рассматриваемая
система является
линейной [1].
3.2 Моменты
внешних сил,
действующие
на космический
аппарат
3.2.1
Аэродинамический
момент
Взаимодействие
корпуса [1, 3] движущегося
с большой скоростью
космического
аппарата с
разряженной
атмосферой
больших высот
вызывает появление
аэродинамических
сил и моментов.
Первые приводят
главным образом
к постепенному
торможению
космического
аппарата и
связанного
с этим эволюции
его орбиты, в
конечном итоге
приводящей
к падению на
поверхность
планеты ее
искусственных
спутников. А
вторые к появлению
внешних моментов,
иногда благотворно,
а чаще неблаготворно
сказывающихся
на режимах
ориентации.
Особенностью
аэродинамического
взаимодействия
корпуса космического
аппарата с
внешней средой
[1, 3] является то,
что вследствие
малой плотности
среды длина
свободного
пробега молекул
атмосферы не
может считаться
малой по сравнению
с характерными
линейными
размерами
корпуса космического
аппарата. В
результате
соударение
"отскочившей"
от поверхности
космического
аппарата молекулы
внешней среды
с другой такой
молекулой
происходит
на большом
удалении от
него, что позволяет
считать, что
каждая молекула
атмосферы
взаимодействует
с корпусом
космического
аппарата независимо
от других. Это
приводит не
к обычной в
аэродинамике
схеме обтекания
тела сплошной
среды, а к картине
"бомбардировки"
такого тела
отдельными
молекулами.
Взаимодействие
молекул разряженной
среды с поверхностью
твердого тела
мыслимо идеализировать
двояким образом:
либо как упругое
соударение
с мгновенным
зеркальным
отражением
молекулы, либо
считать, что
при соударении
молекула отдает
всю свою энергию
телу, приходит
с ним в температурное
равновесие,
а затем выходит
во внешнее
пространство
с тепловой
скоростью.
Поскольку
тепловая скорость
молекулы невелика
по сравнению
со скоростью
движения космического
аппарата, последнюю
схему можно
считать схемой
абсолютно
упругого удара.
Вторая из приведенных
схем значительно
лучше описывает
наблюдаемые
на практике
явления и поэтому
кладется в
основу расчетов.
Однако фактически
происходят
как упругие,
так и неупругие
соударения,
и в более тонких
расчетах следует
учитывать долю
тех и других
[1, 3, 6].
Если по аналогии
с обычной
аэродинамикой
считать, что
возникающие
силы взаимодействия
тела и среды
пропорциональны
скоростному
напору
 ; (3.7)
; (3.7)
где
 - плотность
внешней среды,
- плотность
внешней среды,
 - относительная
скорость тела
и среды, то
элементарная
сила, действующая
на площадку
dS, будет:
- относительная
скорость тела
и среды, то
элементарная
сила, действующая
на площадку
dS, будет:
 ;
(3.8)
;
(3.8)
здесь
 - некоторый
коэффициент,
а
- некоторый
коэффициент,
а
 - угол между
внешней нормалью
к элементарной
площадке dS
и вектором
скорости этой
площадки относительно
внешней среды.
Написанное
соотношение
является следствием
закона сохранения
импульса, и
легко убедиться,
что для абсолютно
неупругого
удара с=2.
- угол между
внешней нормалью
к элементарной
площадке dS
и вектором
скорости этой
площадки относительно
внешней среды.
Написанное
соотношение
является следствием
закона сохранения
импульса, и
легко убедиться,
что для абсолютно
неупругого
удара с=2.
Элементарный
аэродинамический
момент относительно
центра масс
 ; (3.9)
; (3.9)
где r —
радиус-вектор
площадки
dS,
имеющий начало
в центре масс
тела, а полный
момент
 ; (3.10)
; (3.10)
В последнем
выражении
интегрирование
производится
по той части
поверхности
космического
аппарата S,
которая омывается
внешней средой
при его движении.
Входящая в
(3.8), а,
следовательно,
и в (3.10)
скорость
V,
строго говоря,
складывается
из скорости
движения центра
масс
 и линейных
скоростей
элемянтарных
площадок внешней
поверхности
корпуса космического
аппарата, связанных
с его вращением
вокруг центра
масс. Первое
слагаемое
и линейных
скоростей
элемянтарных
площадок внешней
поверхности
корпуса космического
аппарата, связанных
с его вращением
вокруг центра
масс. Первое
слагаемое
 ,
связанное с
,
будет, поэтому
функцией конфигурации
омываемой части
корпуса, а,
следовательно,
функцией конфигурации
внешней поверхности
космического
аппарата и его
положения
относительно
вектора скорости
.
Второе слагаемое,
кроме того,
будет являться
функцией угловой
скорости космического
аппарата. Сравнение
модуля скорости
,
связанное с
,
будет, поэтому
функцией конфигурации
омываемой части
корпуса, а,
следовательно,
функцией конфигурации
внешней поверхности
космического
аппарата и его
положения
относительно
вектора скорости
.
Второе слагаемое,
кроме того,
будет являться
функцией угловой
скорости космического
аппарата. Сравнение
модуля скорости
 с наибольшим
возможным
значением
модуля линейной
скорости внешней
поверхности
космического
аппарата, порожденной
его вращением
вокруг центра
масс, показывает,
что вторым
слагаемым в
задачах активной
ориентации
космических
аппаратов можно
пренебрегать
[1 ,3, 12]. Это связано
как с очень
малыми угловыми
скоростями,
так и с относительно
небольшими
размерами
современных
космических
аппаратов.
Поэтому всюду
будет делаться
предположение
о равенстве
нулю внешнего
аэродинамического
момента, связанного
с вращением
космического
аппарата вокруг
его центра
масс. В этой же
связи скорость
V в выражении
(3.8) может
быть определена
равенством
с наибольшим
возможным
значением
модуля линейной
скорости внешней
поверхности
космического
аппарата, порожденной
его вращением
вокруг центра
масс, показывает,
что вторым
слагаемым в
задачах активной
ориентации
космических
аппаратов можно
пренебрегать
[1 ,3, 12]. Это связано
как с очень
малыми угловыми
скоростями,
так и с относительно
небольшими
размерами
современных
космических
аппаратов.
Поэтому всюду
будет делаться
предположение
о равенстве
нулю внешнего
аэродинамического
момента, связанного
с вращением
космического
аппарата вокруг
его центра
масс. В этой же
связи скорость
V в выражении
(3.8) может
быть определена
равенством
 .
.
П усть
космический
аппарат имеет
форму сферы,
тогда численное
значение
аэродинамического
момента действующего
на сферу, и при
усть
космический
аппарат имеет
форму сферы,
тогда численное
значение
аэродинамического
момента действующего
на сферу, и при
 будет равно
будет равно
 (3.11)
(3.11)
Полученное
выражение
говорит о том,
что при поворотах
вокруг центра
масс космический
аппарат сферической
формы имеет
два положения
равновесия,
соответствующие
 и
и
 .
Если направление
отсчета расположения
центра давления
относительно
центра масс
взять по направлению
вектора
,
то первое положение
равновесия
характеризуется
расположением
центра масс
за центром
сферы (задняя
центровка), а
второе расположением
центра масс
перед центром
сферы (передняя
центровка).
Рассматривая
изменение
аэродинамического
момента в функции
угла
.
Если направление
отсчета расположения
центра давления
относительно
центра масс
взять по направлению
вектора
,
то первое положение
равновесия
характеризуется
расположением
центра масс
за центром
сферы (задняя
центровка), а
второе расположением
центра масс
перед центром
сферы (передняя
центровка).
Рассматривая
изменение
аэродинамического
момента в функции
угла
 в окрестности
положения
равновесия,
можно написать
[8]:
в окрестности
положения
равновесия,
можно написать
[8]:
 ;
(3.12)
;
(3.12)
Это
даст для задней
центровки
 ,
а для передней
,
а для передней
 .
Знаки приведенных
производных
говорят о том,
что при задней
центровке
.
Знаки приведенных
производных
говорят о том,
что при задней
центровке
 космический
аппарат статически
неустойчив
(возникающий
момент имеет
тот же знак,
что и отклонение),
а при передней
центровке
космический
аппарат статически
неустойчив
(возникающий
момент имеет
тот же знак,
что и отклонение),
а при передней
центровке —
устойчив.
—
устойчив.
Это указывает
на основную
закономерность,
характерную
для аэродинамических
моментов, возникающих
при космическом
полете: возникновение
моментов связано
с силами сопротивления
и зависит от
расположения
линий действия
этих сил относительно
центра масс.
При более сложных
конфигурациях
космических
аппаратов
расчет заметно
усложняется,
приходится
учитывать
взаимное затенение
элементов
конструкции,
переменность
(зависимость
от угла поворота)
омываемой
потоком поверхности
S и т.п. Однако
и в этих громоздких
расчетах фактически
сохраняется
приведенная
методика. Результаты
подобных расчетов,
как правило,
представляются
в виде зависимостей
аэродинамических
коэффициентов
моментов от
соответствующих
углов, характеризующих
положение
тела относительно
вектора скорости
центра масс
[1, 3, 8].
Формула
(3.12)
указывает на
зависимость
аэродинамического
момента от
положения
центра масс
на прямой ОА.
В условиях
невозмущенного
движения внешние
моменты должны
быть полностью
уравновешены.
В рассматриваемом
случае это
означает, что
угол
должен быть
равен нулю, т.
е. линия ОА
должна быть
параллельной
вектору скорости.
Если считать,
что происходит
ориентация
в скоростных
осях, то естественно
направить ось
Ох космического
аппарата по
прямой OA,
тогда при идеальной
ориентации
жестко связанная
с корпусом
космического
аппарата ось
Ох будет
совпадать по
направлению
с вектором
,
и вследствие
равенства нулю
угла
аэродинамический
момент будет
равен нулю [1.
3].
Таким образом,
вопрос о величине
аэродинамического
момента и статической
устойчивости
оказывается
связанным с
расстоянием
 взятым на оси
Ох от центра
масс до точки
А. Точку приложения
равнодействующей
аэродинамических
сил называют
центром давления,
и, следовательно,
вектор
определяет
положение
центра давления
относительно
центра масс.
Для тела произвольной
формы тоже
можно ввести
понятие центра
давления как
точки пересечения
линий действия
равнодействующих
аэродинамических
сил.
взятым на оси
Ох от центра
масс до точки
А. Точку приложения
равнодействующей
аэродинамических
сил называют
центром давления,
и, следовательно,
вектор
определяет
положение
центра давления
относительно
центра масс.
Для тела произвольной
формы тоже
можно ввести
понятие центра
давления как
точки пересечения
линий действия
равнодействующих
аэродинамических
сил.
Как уже говорилось,
аэродинамические
силы и моменты
пропорциональны
скоростному
напору q (3.7).
Поскольку
скорость полета
определяется
законами небесной
механики, постольку
при изменении
высоты полета
на малую долю
радиуса планеты
скорость
изменяется
мало. В то же
время известно,
что плотность
окружающей
планету атмосферы
чрезвычайно
сильно зависит
от высоты. Это
позволяет
утверждать,
что величина
q является
для данного
класса космических
аппаратов
(например, для
искусственных
спутников
Земли, движущихся
по почти круговым
орбитам) главным
образом функцией
плотности среды
,
т.е. в конечном
итоге - высоты
полета. Следовательно,
для космических
аппаратов,
траектории
которых достаточно
удалены от
планет, аэродинамические
моменты будут
пренебрежимо
малы [1, 3, 10].
Для математического
моделирования,
будем рассматривать
модель реального
космического
аппарата [10], с
заданными
линейными
размерами.






Солнечные
батареи Корпус
КА
Рис. 3.1.
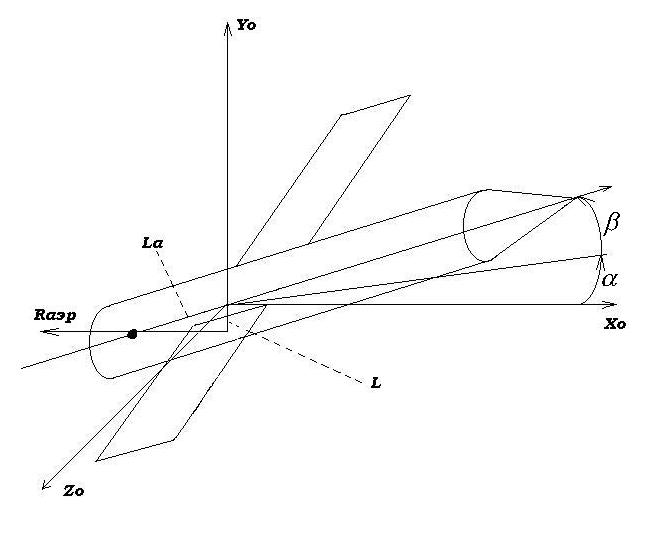
Рис. 3.2.
Исходя из выше
представленной
модели космического
аппарата,
аэродинамические
моменты в каждом
из каналов,
можно представить
в виде:

 (3.13).
(3.13).

3.2.1.1 Аппроксимация
плотности
земной атмосферы
аналитическими
зависимостями
Предполагается,
что рассматриваемая
модель упругого
космического
аппарата [1, 3, 10,
11] движется в
атмосфере
земли. Тогда
на КА действуют
моменты внешних
сил, такие как
гравитационный
и аэродинамический
моменты. Для
нахождения
аэродинамического
момента, необходимо
знать плотность
атмосферы,
которая зависит
от высоты полета.
В данной задаче
требуется [11,
24] аппроксимировать
функцию полиномом
3-его порядка
вида:
 ;
(3.14)
;
(3.14)
Полином (3.14)
в каждом из
узлов аппроксимации
должен удовлетворять
условию:
 ;
(3.15)
;
(3.15)
Таким образом,
задача аппроксимации
функции сводится
к решению системы
с N+1 уравнений
с тремя неизвестными:
 ;
(3.16)
;
(3.16)
Это объясняется
тем, что полином
должен пройти
через все N+1
точек (в данном
случае это 25
точек) в которых
задана функция
x = x(t).
Метод наименьших
квадратов
позволяет такую
систему привести
к решаемой
системе. Запишем
функционал:
 .
.
Это достигается
тогда, когда
выполняется:
 ;
;
Взяв соответствующие
производные,
получим систему:
 ;
;
(3.17)
В отличии от
системы (3.16)
полученная
система определена
и имеет единственное
решение [24].
В результате
проведенных
расчетов, для
составления
системы, были
произведены
расчеты, приводить
которые нецелесообразно
ввиду их громоздкости.
Подставив в
систему (3.17)
соответствующие
значения, в
результате
мы получим
систему. Эту
систему будем
решать методом
Гаусса.
3.2.1.2 Построение
аппроксимирующего
полинома для
плотности
земной атмосферы
Воспользовавшись
таблицей стандартной
атмосферы
[10,11], построим
графики зависимостей
от высоты функции
Po(H):
Плотность:

Рис. 3.3 -
Зависимость
плотности
воздуха от
высоты
Аппроксимирующий
полином:

3.2.2 Гравитационный
момент
В обычных задачах
механики [1, 3, 6,
10, 11, 12], связанных
с ее техническими
приложениями,
ускорения силы
тяжести в различных
точках материального
тела считаются
равными как
по величине,
так и по направлению.
Это сразу приводит
к известному
положению о
совпадении
центра масс
и центра тяжести
материального
тела и, как
следствие, к
равенству нулю
момента гравитационных
сил относительно
центра масс.
На самом деле
векторы ускорения
силы тяжести
различных
точках тела
всегда различны,
вследствие
того, что все
они направлены
к центру Земли,
а, следовательно,
если рассматриваемые
точки не лежат
на одной прямой,
проходящей
через центр
притяжения,
то векторы
параллельны,
а если точки
лежат на одной
такой прямой,
то – имеют различное
удаление от
центра притяжения
и, значит, соответствующие
ускорения
отличаются
по величине.
Однако это
уточнение в
обычных задачах
механики
несущественно,
поскольку
размеры технических
сооружений
малы по сравнению
с радиусом
Земли, и поэтому
вызванные
сформулированным
здесь уточненные
моменты столь
малы по сравнению
с другими, что
учет их не смысла.
Космический
аппарат, движущийся
по околоземной
орбите [6], тоже
мал по сравнению
с расстоянием
до центра притяжения
планеты, однако
он не подвержен
(если не считать
времени включения
двигателей)
действию больших
внешних моментов,
и поэтому
пренебрежение
малыми в обычной
технике моментами
(гравитационными,
связанными
со световым
давлением и
т. п.) уже не будет
законным без
соответствующей
оценки этих
моментов [1, 3].
Прежде, чем
получить формулы
для вычисления
гравитационных
моментов и
обсудить некоторые
следствия,
вызванные
существованием
этих внешних
моментов, поясним
физическую
сущность
рассматриваемого
явления па
простейшем
примере. Пусть
в центральном
ньютоновом
поле сил находится
тело, могущее
быть представленным
в виде двух
одинаковых
точечных масс,
соединенных
невесомым
стержнем
(идеализированная
гантель), и пусть
этот стержень
будет наклонен
на некоторый
угол (отличный
от 0 и pi/2) к
линии, соединяющей
его середину
А с центром
притяжения
С (рис. 3.4).

Рис. 3.4
– Тело в виде
двух одинаковых
точечных масс,
соединенных
невесомым
стержнем
(идеализированная
гантель) в ньютоновом
поле
Если принять
обычные допущения
о параллельности
и равенстве
сил тяжести)
действующих
на обе массы
гантели (считаем,
что на них действует
ускорение силы
тяжести, соответствующее
точке А), то
связанные с
ними силы G
не дали бы момента
относительно
точки А, являющейся
центром масс
рассматриваемого
тела. На самом
деле силы тяжести
будут действовать
по прямым В1С
и В2С, а величина
силы тяжести
в точке И1 будет
меньше, чем в
точке И2, поскольку
В1С > В2С. Поэтому
к “обычным”
силам G, вычисленным
по вектору
ускорения силы
тяжести, соответствующему
точке А, следует
ввести поправки,
например малые
силы P1i и
P2, изменяющие
должным образом
величины сил
тяжести, действующий
на материальные
точки, и силы
P1 и Р2, изменяющие
должным образом
направления
этих сил тяжести.
Из рисунка
видно, что пара
сил R1 и R2 и
пара сил P1 и Р2
(их можно считать
'парами, постольку
малые силы Р1
и Р2, а также R1 и
R2 будут отличаться
друг от друга
на .величины
высшего порядка
малости) создают
моменты одного
знака, стремящиеся
совместить
ось тела B1B2
с исправлением
АС.
Таким образом,
как зависимость
величины ускорения
силы тяжести
от расстояния
до центра притяжения,
так и центральность
поля тяготения
приводят к
эффектам одного
типа - к появлению
моментов, стремящихся
повернуть ось
тела, связанную
с геометрией
распределения
масс в нем, в
некоторое
определенное
положение
относительно
прямой, соединяющей
центр масс
тела с центром
притяжения.
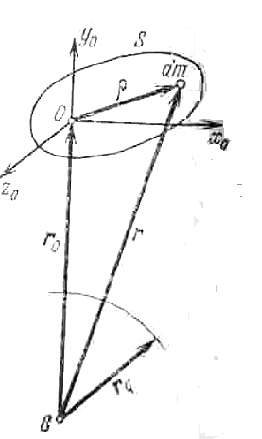
Рис. 3.5.
Найдем выражения,
позволяющие
вычислять
составляющие
вектора гравитационного
момента Мгр,
действующего
на некоторое
тело S [1, 3].
Введем связанную
с телом правую
систему координат
ОXоYоZo
с ортами i, j, k и
началом в центре
масс тела О,
которая совпадает
с орбитальной.
Соответственно
ось OYo натравим
по продолжению
радиуса-вектора,
соединяющего
центр притяжения
С с началом О,
а ось ОXo
расположим
в мгновенной
орбитальной
плоскости.
Гравитационный
момент, действующий
на тело S, будет
равен:
 ;
;
где p - радиус-вектор
некоторой
элементарной
массы материального
тела,
dG-вектор силы
тяжести, действующей
на эту элементарную
массу. Очевидно,
что
 .
.
Здесь g - ускорение
силы тяжести
на поверхности
планеты, r
– радиус-вектор
элементарной
массы dm относительно
центра тяготения
С, гg -удаление
поверхности
планеты от
центра C.
Введя еще r0
- радиус-вектор
центра масс
тела S относительно
С, следовательно
[3]:
 ;
;
где
 - гравитационная
постоянная
для рассматриваемой
планеты, равная
- гравитационная
постоянная
для рассматриваемой
планеты, равная
 .
.
Проекции
гравитационного
момента на оси
триэдра ОXoYoZo,
будут равны:
 ;
(3.18)
;
(3.18)
где D и F-центробежные
моменты инерции
тела S, определяемые
для системы
осей ОXоYоZo.
Полученные
для гравитационного
момента выражения
говорят о том,
что вектор
этого момента
всегда лежит
в плоскости
местного горизонта
(перпендикулярен
к местной вертикали
СО) [1, 4, 10]. Кроме того,
очевидно, что
гравитационный
момент для
тела, главные
центральные
оси инерции
которого в
данное мгновение
совпадают с
орбитальными,
равен нулю (так
как в этом случае
D=F=0), в частности
он всегда равен
нулю для тела,
эллипсоид
инерции которого
является сферой.
В общем случае
главные центральные
оси инерции
тела могут быть
повернуты
произвольным
образом относительно
орбитальных
осей ориентации.
Обозначим
жестко связанный
с телом S триэдр,
совпадающий
с главными
центральными
осями инерции,
через Охуz,
а для орбитальных
осей сохраним
обозначение
OXoYoZo. Взаимное
положение этих
систем координат
определим
следующей
таблицей направляющих
косинусов:
 .
.
Найдем проекцию
гравитационного
момента на ось
Ох. Очевидно,
что
 .
(3.19)
.
(3.19)
Воспользовавшись
свойством
направляющих
косинусов,
преобразуем
равенство
(3.19) с учетом
формул (3.18):
 ;
(3.20)
;
(3.20)
поскольку
триэдр Oxyz совпадает
с главными
центральными
осями инерции,
постольку все
центробежные
моменты инерции
в этих осях
будут равны
нулю, и выражение
(3.20) может
быть