Проектирование круглосуточной оптико-телевизионной системы
6704 [м].
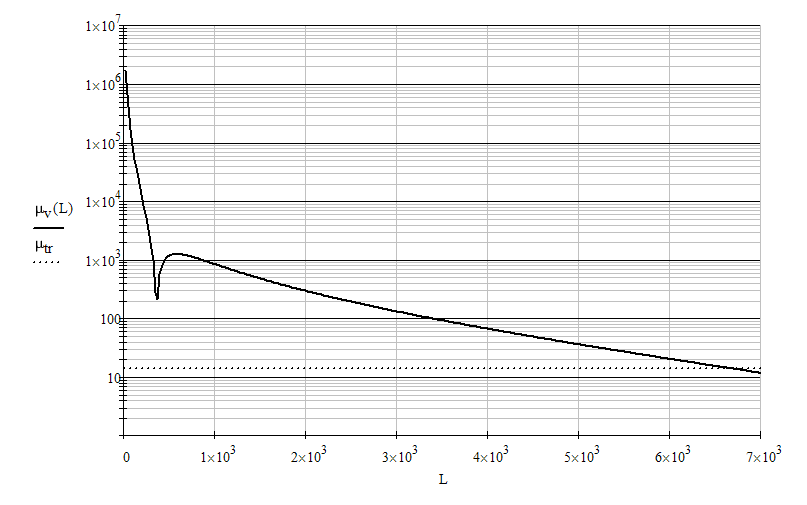
Рис.
5. Зависимость
воспринимаемого
отношения
сигнал/шум от
дальности
распознавания
цели №2.
Дальность
распознавания
объекта дневной
ПЗС-камерой.
Данные
для расчёта:
1) Входной
объектив.
Фокусное
расстояние
Fob
= 600 мм.
Дальность
распознавания
не менее 6700 м.
Интегральный
коэффициент
пропускания
в рабочем диапазоне:
Kob
= 0,82.
Предположим,
что для достижения
необходимой
дальности
распознавания
достаточно
будет иметь
диаметр входного
зрачка, удовлятворяющий
условию параксиальной
системы (D
: f’
= 1 : 10). Тогда DДТВ
= 60 мм.
ФПМ
дифракционно
ограниченной
системы определяется
как[2]:
 ,
где(33)
,
где(33)
 [мм-1].
[мм-1].
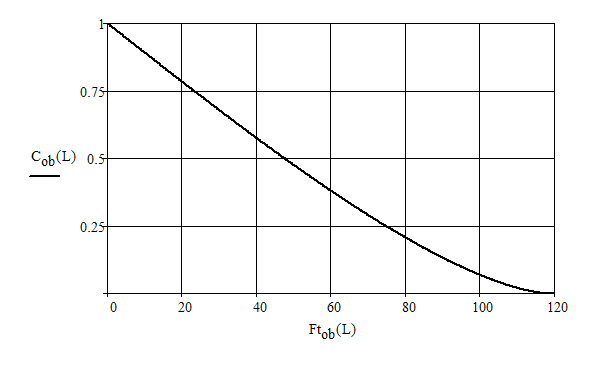
Рис.
6. Функция передачи
модуляции
входного объектива
дневного канала.
2) ПЗС
матрица
Помимо
указанных в
предыдущем
разделе параметров,
необходима
относительная
спектральная
чувствительность
ПЗС-матрицы:
3) Фоноцелевая
обстановка
отличается
от описанной
в разделе 2.2.2.1
уровнем освещённости
Земной поверхности:
Ev =
104 лк.
Рассчитаем
спектральную
яркость объекта
и фона:
Аналогично
п. 2.2.2.1, но относительная
спектральная
яркость источника
(Солнце) описывается
исходя из соотношения
Планка для АЧТ,
нагретого до
температуры
5217 К.
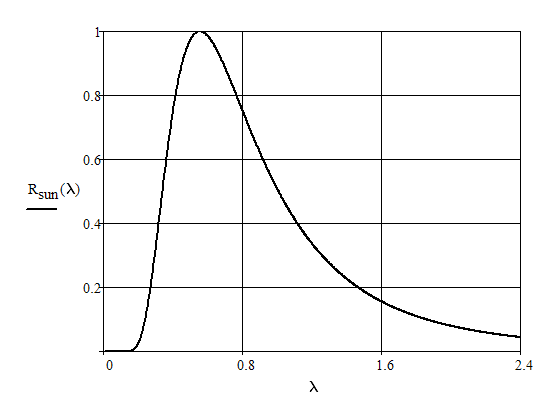
Рис.
7. Относительная
спектральная
яркость Солнца.
 -
число электронов,
полученное
от фотокатода
за время
-
число электронов,
полученное
от фотокатода
за время

 (постоянная
времени глаза)
при облучении
от зон миры,
соответствующих
объекту и фону:
(постоянная
времени глаза)
при облучении
от зон миры,
соответствующих
объекту и фону:

(34),
Где
- максимум
спектральной
чувствительности
приёмника.
Число
темновых электронов,
получаемое
от одной чувствительной
площадки ПЗС-матрицы
за время
:
Расчёт совпадает
с приведённым
в разделе 2.2.2.1.
Сквозная
передаточная
функция дневного
канала.
1. Функция передачи
модуляции
объектива.
Пространственная
частота для
объектива
находится так
же, как и в разделе
2.2.2.1.
График ФПМ
объектива
приведен на
рис.14.
2. Геометрическая
ФПМ ПЗС-матрицы.
Пространственная
частота для
ПЗС матрицы
в данном случае
совпадает с
пространственной
частотой объектива.
Геометрическая
ФПМ ПЗС-матрицы
приведена на
рис. 10.
3. ФПМ растекания
заряда ПЗС
матрицы.
Приведена на
рис.11.
Очевидно, сквозная
передаточная
функция прибора:
 (35)
(35)
Найдём отношение
сигнал/шум:
 (36)
(36)
Требуемое
отношение
сигнал/шум –
аналогично
разделу 2.2.
Таким образом
получим для
цели №1 Lрасп
= 10800 [м].
Для цели №2
Lрасп = 15500 [м].
Аберрационный
расчет объектива
НУТВ
Коррекция
двухзеркальной
системы
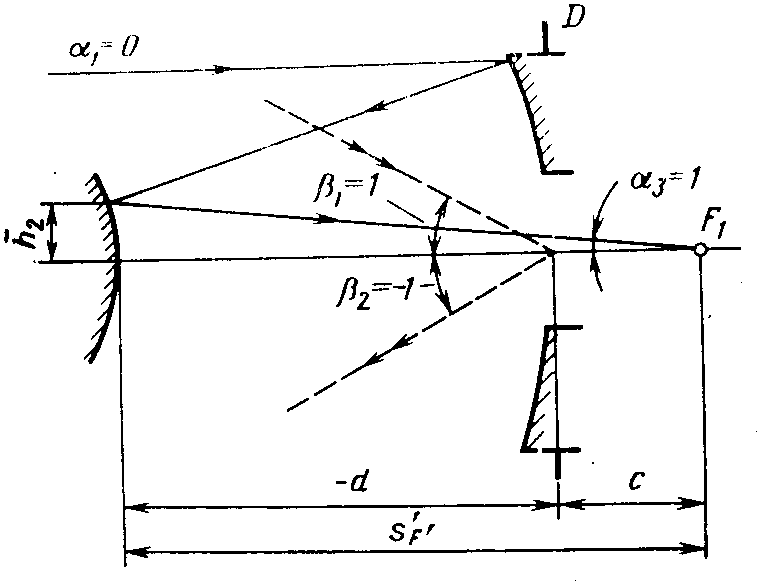
Рис. 8. Оптическая
схема двухзеркального
объектива
Принципиальная
схема двухзеркалькой
системы[6] показана
на рис. 18. Расстояние
с от вершины
большого зеркала
до плоскости
изображения
обычно оговаривается
в технических
условиях на
расчет системы
и зависит от
конкретного
назначения
объектива.
Будем считать,
что центр входного
зрачка совпадает
с вершиной
большого зеркала.
Для вспомогательных
лучей примем
следующие
условия нормировки:
α1
= 0; h1 = 1; α3
=1; β1 = 1; Н1
= 0; β2 = -1. Отрезки
-d, с и S’f’
на рис. 18 приведены
к фокусному
расстоянию,
равному единице.
Видно, что
двухзеркальная
система имеет
два свободных
параметра (α2
и d), которые следует
выбирать с
учетом габаритных
условий.
Для расширения
коррекционных
возможностей
рассмотренной
системы используют
различные
линзовые компенсаторы
или деформируют
поверхности
зеркал, делая
их несферическими.
Компенсация
сферической
аберрации.
Определение
коррекционных
параметров
Линза поз. 1 (см.
оптическую
схему принципиальную)
имеет отрицательную
сферическую
аберрацию, так
же как и главное
зеркало поз.
2, если его изготовить
с наружной
отражающей
поверхностью
("собирающие
элементы").
Известно [6], что
отрицательная
линза имеет
положительную
сферическую
аберрацию.
Поэтому комбинация
положительной
линзы, имеющей
отрицательную
сферическую
аберрацию, с
отрицательной
линзой позволяет
получить систему
с исправленной
сферической
аберрацией.
К сожалению,
устранить
сферическую
аберрацию можно
только для
некоторых
лучей, но нельзя
ее полностью
исправить в
пределах всего
входного зрачка.
Исходя из
вышесказанного,
выполним главное
зеркало в виде
зеркала с внутренней
отражающей
поверхностью
(т.н. зеркало
Манжена). Тогда
преломляющая
поверхность
и ее отражение
в развертке
хода лучей
образуют
отрицательную
линзу. Это обеспечит
нам один корректирующий
параметр (при
фиксированной
толщине) – радиус
преломляющей
поверхности
зеркала.
Компенсация
комы. Определение
коррекционных
параметров
Рассмотрим
компенсатор,
состоящей из
линзы, расположенной
в сходящихся
пучках лучей
(линза поз. 4 на
оптической
схеме).
При фиксированной
оптической
силе и толщине
компенсатор
имеет один
свободный
параметр (радиус
одной из поверхностей).
При определении
конструктивных
параметров
компенсатора
следует иметь
ввиду, что его
коррекционные
возможности
зависят от
положения
компенсатора
относительно
плоскости
малого зеркала.
Если компенсатор
располагать
ближе к малому
зеркалу, то он
сильнее будет
влиять на сферическую
аберрацию
системы, если
компенсатор
приближать
к задней фокальной
плоскости, то
возрастает
его влияние
на полевые
аберрации.
Применение
компенсатора
целесообразно
при относительных
отверстиях
до 1 : 5, что соответствует
данному случаю.
Расчет конструктивных
параметров
Рассчитаем
конструктивные
параметры
оптической
системы методом
проб[6]. Метод
проб состоит
в исследовании
и использовании
зависимостей
между изменениями
отдельных
параметров
оптической
схемы с известной
конструкцией
и вызываемыми
ими изменениями
значений аберраций.
Первоначально
из каталогов,
архивных данных
или патентов
выбирают наиболее
подходящую
оптическую
систему, которую
пересчитывают,
если это необходимо,
на требуемое
фокусное расстояние
или увеличение
и принимают
за исходную.
Последовательно
изменяя значения
отдельных
параметров
исходной системы,
получают конечный
ряд вариантов
оптической
системы. Рассчитывают
ход ряда лучей
осевого и наклонного
пучков через
оптическую
систему каждого
из полученных
вариантов,
вычисляют
аберрации и,
сравнивая их
с аберрациями
исходной системы,
находят указанные
выше зависимости.
Результаты
исследований
анализируют
по таблицам
или графикам,
иллюстрирующим
влияние изменений
параметров
на аберрации
и другие величины,
характеризующие
свойства оптической
системы. Путем
интерполяции
или экстраполяции
по таблицам
или графикам
находят вариант
оптической
системы, который
удовлетворяет
техническому
заданию. В качестве
изменяемых
параметров
могут быть
взяты конструктивные
параметры (r,
d, n). Очевидно,
что метод проб
достаточно
трудоемок по
времени, так
как требуется
проводить
большое количество
расчетов хода
лучей через
систему. Однако
интенсивное
развитие ЭВМ
в последние
годы позволяет
сделать это
в автоматическом
режиме.
Исходная система:
Исходной системой
является объектив,
разработанный
на ОАО "НПО
Геофизика-НВ".
Он не удовлетворяет
требованиям
к качеству
изображения
и результатам
габаритного
расчета. Имеет
следующие
характеристики:
Заднее
фокусное расстояние
270 мм.
Диаметр
входного зрачка
200 мм, диаметр
экранированной
части 100 мм.
Угловое
поле 5,3°.
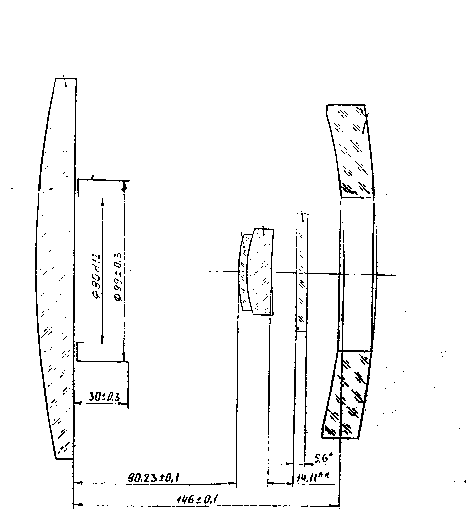
Рис.
9. Оптическая
схема исходного
объектива.
Конструктивные
параметры
объектива:
|
Номер
поверхности
(по
ходу лучей)
|
Радиус,
мм |
Толщина
по оси, мм |
Материал |
| 1 |
656,10 |
|
|
|
|
21 |
К8 |
| 2 |
∞ |
|
|
|
|
146,01 |
воздух |
| 3 |
-364,13 |
|
|
|
|
18 |
К8 |
| 4 |
-570,2 |
|
Зеркало |
|
|
-18 |
К8 |
| 5 |
-364,13 |
|
|
|
|
-146,01 |
воздух |
| 6 |
∞ |
|
Зеркало |
|
|
90,23 |
воздух |
| 7 |
88,92 |
|
|
|
|
5 |
ТФ5 |
| 8 |
69,02 |
|
|
|
|
13,4 |
ТК14 |
| 9 |
625,2 |
|
|
Опишем поэтапно
расчет конструктивных
параметров
при помощи САПР
Zemax (в диалоговом
режиме).
Моделирование
исходной оптической
системы.
Масштабирование
всей системы
с целью получения
искомого фокусного
расстояния
(1307 мм).
Задание
искомого диаметра
входного зрачка
(250 мм).
Задание
искомого размера
изображения
(18 мм).
Приведение
коррекционных
элементов к
виду, описанному
в п. 2.3.1, 2.3.2.
Задание
оптимизационных
требований
и ограничений:
Минимизация
размера усредненного
(по зрачку и
по длинам волн)
кружка рассеяния,
содержащего
70% энергии.
Максимальная
длина оптической
системы, максимальное
отношение
светового
диаметра компонент
к их толщине,
минимальное
расстояние
между компонентами,
допустимость
отклонения
от заданного
фокусного
расстояния.
Назначение
коррекционных
параметров
соответственно
с п. 2.3.1, 2.3.2.
Автоматизированный
расчет.
С результатами
аберрационного
расчета объектива
НУТВ и объектива
можно ознакомиться
в приложении
1.
С конструктивными
параметрами
объектива ДТВ,
его МПФ, и конструктивными
параметрами
коллиматора
ЛОС можно
ознакомиться
в приложении
2.
Вывод
Приведено
обоснование
оптической
схемы КТВС.
Проведен
габаритный
расчет, который,
к сожалению,
показывает,
что одновременное
соблюдение
требований
ТЗ по габаритам
и угловому
полю не представляется
возможным.
Проведен
расчет сквозной
передаточной
функции системы.
Проведен расчет
дальности
действия, на
основании
которого выбрано
число лазеров
в ЛОС. Расчет
показал, что
дальность
распознавания
для ночного
канала составляет
6700 м, для дневного
– 11000 м.
Проведен
аберрационный
расчет, в результате
которого были
получены
конструктивные
параметры
оптических
схем КТВС.
Конструкторская
часть
Анализ
основных вариантов
исполнения
КТВС
Рассмотрим
основные технические
варианты, позволяющие
выполнять
задачу распознавания
цели при изменении
естественной
освещённости
окружающих
объектов от
10-4 до 104 лк.
Телевизионная
камера на основе
ПЗС – матрицы
Современные
высокочувствительные
видеокамеры
на основе ПЗС-матрицы
имеют достаточно
низкую пороговую
освещенность
объекта – порядка
10-4 лк. (табл. 1)
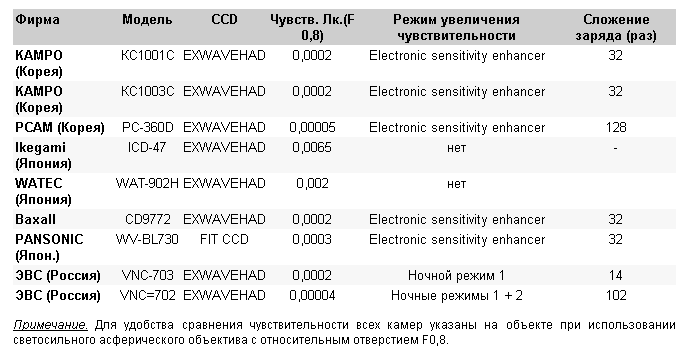
Таблица 1.
Чувствительность
ТВ камер в режиме
накопления.
о достигается
за счёт:
А) Интегрированного
накопления
сигнала с нескольких
фоточувствительных
площадок ПЗС
– матрицы, что
приводит к
снижению разрешающей
способности
и затруднению
задачи распознавания.
Б) Накопления
сигнала нескольких
кадров, что так
же приводит
к затруднению
задачи наблюдения
за обстановкой.
Доведение же
порога чувствительности
видеокамер
до 10-4 лк при
сохранении
качественного
изображения
на данный момент
является нерешённой
в серийном
производстве
ПЗС-матриц
технической
задачей.
Поэтому данный
вариант исполнения
КТВС не отвечает
техническим
требованиям.
Низкоуровневая
телевизионная
камера, работающая
в круглосуточном
режиме.
Структурная
схема такого
прибора приведена
на рис. 1.2.1
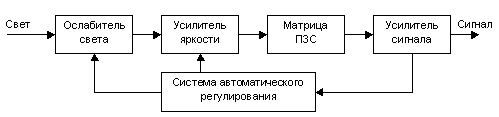
Рис. 10. Структурная
схема КТВС.
Рассчитаем
динамический
диапазон освещённости
фотокатода
ЭОП. Примем
"комфортный"
уровень наблюдения
обстановки,
не приводящий
к выгоранию
фотокатода,
равным 10-1 лк.
Тогда динамический
диапазон
 (37)
(37)
Применим фотохромный
жидкостный
светофильтр.
Его динамический
диапазон равен
отношению
коэффициентов
пропускания
в "затемнённом"
и "просветлённом"
состоянии
 (38)
(38)
Тогда динамический
диапазон изменения
площади открытой
части ирисовой
диафрагмы
камеры
 (39)
(39)
Диапазон изменения
диаметра входного
зрачка:
 (40)
(40)
При диаметре
входного зрачка
Dmax =
250 мм :
 мм(41)
мм(41)
Такое соотношение
приводит к:
1) Высоким требованиям
к конструкции
ирисовой диафрагмы.
2) Сильному вкладу
дифракции в
кружок рассеяния
объектива. При
фокусном расстоянии
объектива 1307
мм на длине
волны излучения
0,85 мкм обусловленный
только дифракцией
размер кружка
рассеяния будет
равен:
 мм(42),
мм(42),
что
совершенно
недопустимо.
Вывод:
оптимальным
вариантом
реализации
КТВС является
система с двумя
каналами наблюдения
(дневным и ночным),
переключение
между которыми
осуществляется
при определённом
уровне освещённости,
определяемом
оператором.
Анализ
основных вариантов
исполнения
НУТВ.
Выделим
два основных
эргономических
требования
к такой системе:
1) Удобство
наблюдения.
Оператор должен
иметь возможность
наблюдать сцену
на мониторе,
в комфортных
для своего
зрительного
анализатора
условиях.
2) Возможность
цифровой обработки
для улучшения
изображения
и процесса
распознавания.
Очевидно,
что единственной
системой ночного
канала, удовлетворяющей
этим требованиям,
будет НУТВ –
низкоуровневая
телевизионная
система.
Рассмотрим
разные варианты
реализации
НУТВ.
1. Наиболее
простое решение
- присоединение
к ПНВ вместо
окуляра телекамеры.
Некоторые ПНВ
комплектуются
адаптерами
для присоединения
телекамер,
легко осуществляемого
самим пользователем
прибора.
С помощью
специальных
адаптеров экран
ЭОП может быть
оптически
сопряжен с
матрицей ПЗС
ТВ видеокамеры.
Это достигается
с помощью оптики
переноса изображения.
Это позволяет
получить изображения
на электронных
носителях,
упрощает и
ускоряет процесс
создания изображений,
их тиражирования,
допускает их
обработку в
реальном масштабе
времени или
с накоплением
информации.
При этом ПНВ
выполняют в
виде малогабаритной
насадки для
фото- или видеокамеры.
Для того чтобы
перенести
изображение
с экрана ЭОП
ПНВ на светочувствительный
элемент фото-
или видеокамеры,
чаще всего
применяют
линзовые адаптеры,
которые входят
в комплект ПНВ.
Типичная оптическая
схема такого
адаптера дана
на рис. 21. Адаптеры
называют линзами
Релея. Они могут
переносить
изображение
в масштабе 1:1,
либо с увеличением
1,5 – 2,5х, либо с
уменьшением
до 0,5х. Уменьшение
часто бывает
необходимо
для согласования
линейных полей
зрения экрана
ЭОП и матрицы
ПЗС, а также
для повышения
ее освещенности.
Относительное
отверстие
адаптера может
быть от 1:1,5 до 1:6,
фокусное расстояние
от 15 до 40 мм.
2. Использование
ЭОП и ПЗС матрицы
в одном приборе.
ПЗС – матрица
с электронной
чувствительностью,
TEP-фотокатод.
Разработка
таких систем
стала возможна
благодаря
созданию ЭОП
с фотокатодом
на основе барьеров
Шоттки – так
называемым
ТЕР-фотокатодом
(ТЕР – Transferred Electron Photocathode). На
рис. 22 представлена
кривая спектральной
чувствительности
ТЕР-фотокатода
(кривая 1) в сравнении
с кривой чувствительности
обычного фотокатода
ЭОП III поколения.
Принимая во
внимание меньшую
чувствительность
ТЕР-фотокатода,
представляется
целесообразным
использовать
его в ТВ-камере
на базе ПЗС с
электронной
бомбардировкой.
На рис. 23 представлена
схема построения
такой ТВ-камеры,
где 1 – ТЕР-фотокатод;
2 – поток электронов;
3 – вакуумированный
объем; 4 – матрица
ПЗС; 5 – видеоусилитель;
6 – жидкокристаллический
(ЖК) ТВ-монитор.
Разработана
ТВ-камера с
форматом 2/3 дюйма,
числом пикселей
768х244, при частоте
кадров 60 Гц.
Предельная
разрешающая
способность
ТВ-камеры составляет
45 л/мм. При работе
ТВ-камеры в
течение 12000 часов
чувствительность
фотокатода
падает на 50%.
ТВ-камера допускает
режим стробирования.
Это позволяет
использовать
ее совместно
с импульсным
лазерным осветителем,
генерирующим
на длине волны
0,85 мкм, в качестве
активно-импульсной
ТВ-системы. При
этом время
фронта и среза
импульса строба
не превышает
100 нс. При напряжении
2 кВ коэффициент
усиления камеры
свыше 150. В ТВ-камере
отсутствуют
обычные для
ЭОП III поколения
микроканальная
пластина и
волоконно-оптические
детали, снижающие
качество изображения.
Видеосигнал
с выхода матрицы
ПЗС (4) усиливается
в видеоусилителе
(5) и поступает
в ЖК ТВ-монитор
(6), на экране
которого создается
ТВ-изображение.
3. Использование
ЭОП и ПЗС матрицы
в одном приборе.
Перенос изображения
с экрана ЭОП
на чувствительный
слой ПЗС-матрицы
осуществляется
проекционным
объективом.
Функциональную
схему такого
устройства
можно представить
следующим
образом:

Рис.
11. Функциональная
схема ночного
телевизионного
канала.
Объектив
1 - приемный
объектив; ЭОП
- электронно-оптический
преобразователь;
объектив 2 -
проекционный
объектив; камера
- видеокамера
с ПЗС.
Электронно-оптический
преобразователь
предназначен
для формирования
на люминесцентном
экране ЭОП
усиленного
по яркости
изображения.
Проекционный
объектив переносит
изображение
с люминесцентного
экрана ЭОП на
ПЗС телевизионной
камеры.
Видеокамера
с ПЗС формирует
телевизионный
сигнал ночного
канала.
Видеокамера
с ФПМ ПЗС формирует
полный телевизионный
видеосигнал,
который по
кабелю связи
поступает в
блок электронной
обработки и
в комплекс
средств автоматики.
Из блока обработки
полный видеосигнал
в аналоговом
виде поступает
на блок индикации.
4. Использование
ЭОП и ПЗС матрицы
в одном блоке.
Перенос изображения
с экрана ЭОП
на чувствительный
слой ПЗС-матрицы
осуществляется
волоконной
пластиной.
Функциональную
схему такого
устройства
можно представить
следующим
образом:
Расчёт
таких систем
почти аналогичен
расчёту предыдущей.
Преимущество:
в десять раз
больший КПД
переноса. Если
проекционным
объективом
переносится
порядка 6% светового
потока, то ВОП
переносится
порядка 60% светового
потока, излучаемого
люминофорным
экраном ЭОП.

Рис.
12. Функциональная
схема ночного
телевизионного
канала.
ЭОП
- электронно-оптический
преобразователь
с люминесцентным
экраном на
выходе; ВОП -
волоконно-оптическая
пластина; S1, S2, S3
- оптические
сигналы: S1 - от
объекта наблюдения
и фона; S2 - от
люминесцентного
экрана ЭОП; S3
- после прохождения
через ВОП; S4 -
электрический
сигнал на выходе
ФПМ ПЗС.
Недостаток:
ВОП имеет разрешающую
способность
около 30…40 л/мм,
что критично
сказывается
на предельной
дальности
распознавания
небольших
объектов. Однако
при использовании
ЭОП четвёртого
и пятого поколений,
имеющих большую
разрешающую
способность,
применение
ВОП может быть
целесообразно.
В данном
проекте будет
воплощен вариант
3 , так как он имеет
явные преимущества:
По
сравнению с
вариантом 1
более удобен
в эксплуатации,
устойчив к
внешним воздействиям,
лучше качество
изображения,
меньше энергетических
потерь.
По
сравнению с
вариантом 2
более высокое
отношение
сигнал/шум,
которое можно
получить, не
прибегая к
сложному охлаждению.
По
сравнению с
вариантом 4
лучше качество
изображения.
Описание
конструкции
КТВС и ее узлов
Конструкция
лазерной
осветительной
системы
Конструкция
ЛОС представлена
на рис. 26.
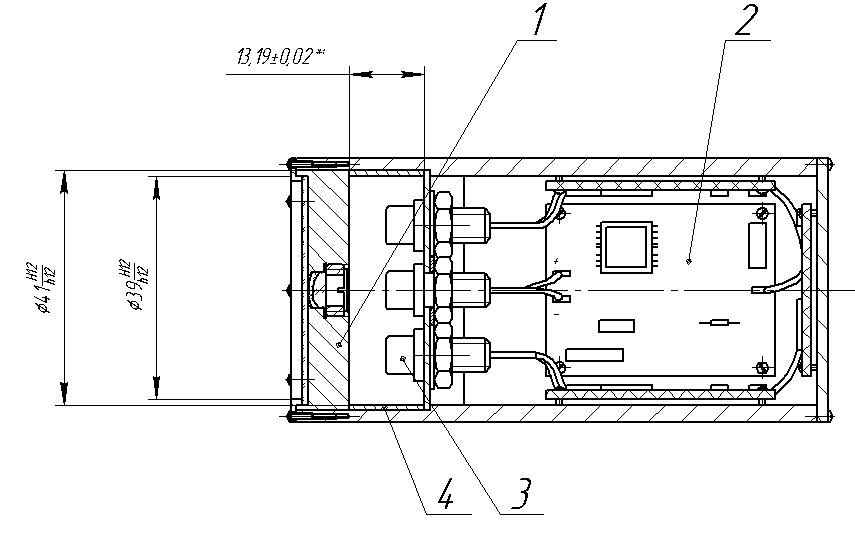
Рис.
13. Конструкция
лазерной
осветительной
системы.
При
сборке базовым
узлом является
корпус с предустановленными
печатными
платами поз
2. В него устанавливается
лазерная батарея
поз. 3. Посадка
происходит
по гладкой
цилиндрической
поверхности
диаметром 41
мм. Затем на ту
же поверхность
устанавливается
кольцо поз. 4,
которое определяет
расстояние
между лазерами
и коллиматорами.
Это расстояние
(13,19 мм) обеспечивается
подрезкой торца
кольца поз 4.
Затем
на кольцо
устанавливается
растр коллиматоров
поз. 1, в него по
гладкой цилиндрической
поверхности
диаметром 39 мм
– защитное
стекло.
Последнее
в свою очередь
прижимается
крышкой.
Обоснование
допусков.
Очевидно,
что посадки
с зазором по
12-му квалитету
приведут к
поперечному
смещению друг
относительно
друга коллиматорного
и лазерного
узлов. Это приведет
к тому, что
оптическая
ось выходящего
излучения будет
не параллельна
оптическим
осям лазеров.
Однако при
сборке всей
КТВС юстировка
приемных каналов
будет проводиться
именно относительно
пучка лучей
осветителя,
поэтому такие
допуски можно
признать
удовлетворительными.
В свою очередь,
расходимость
пучка чувствительна
к дефокусировке,
поэтому на нее
назначен допуск
±20 мкм.
Конструкция
дневной телевизионной
системы.

Рис. 14.
Конструкция
ДТВ.
Камера
телевизионная
в оправе поз.
1 соединяется
по резьбовой
поверхности
с объективом
в оправе поз.
2. Для обеспечения
размера заднего
фокального
отрезка с заданной
точностью (0,6
мм) используется
юстировочное
кольцо поз.3.
Его толщина
уменьшается
путем вытачивания
на токарном
станке до нужного
значения.
После
юстировки
кольцо и оправа
объектива
соединяются
штифтами поз.
4 с оправой камеры.
Конструкция
низкоуровневой
телевизионной
системы.
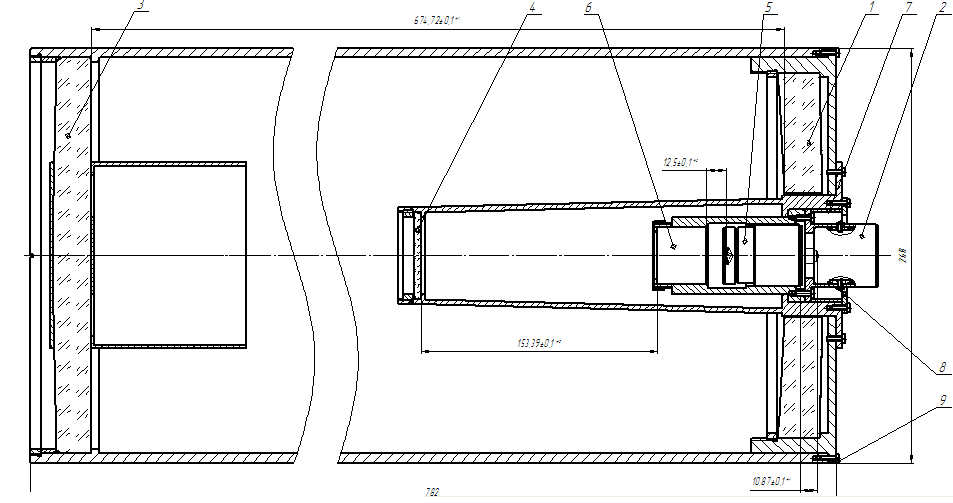
Рис.
15 Конструкция
НУТВ.
Здесь
объектив переноса
поз. 5 вкручивается
по резьбовой
поверхности
в оправу ЭОП
6. Затем к этой
оправе присоединяется
винтами телевизионная
камера 2. Размер
между объективом
переноса и
камерой обеспечивается
подрезкой торца
оправы ЭОП.
Затем
получившийся
узел из двух
оправ по цилиндрической
поверхности
диаметром 60 мм
соединяют
оправой сб. ед.
поз 4, и фиксируют
крышкой поз.
8 при помощи
кольца поз. 7.
Расстояние
между линзой
и ЭОП регулируется
подрезкой одной
из поверхностей
сб. ед. поз. 6.
Конструкция
КТВС.
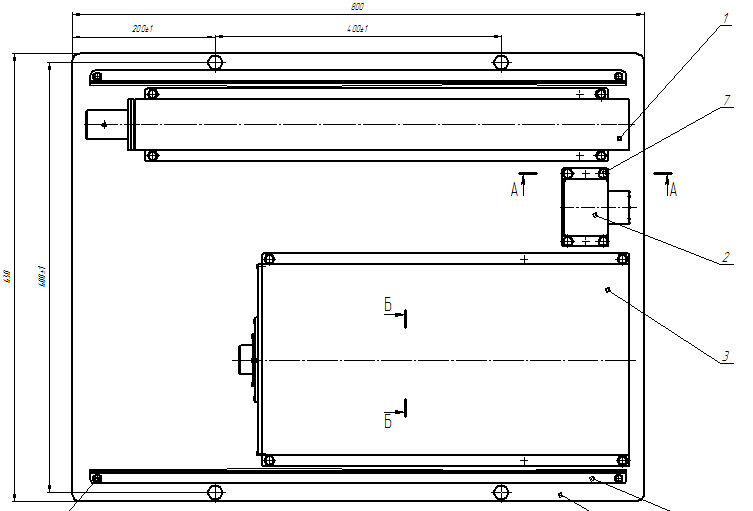
Рис.16.
Конструкция
КТВС.
На
данном этапе
сборки проводится
юстировка
каналов. Сначала
на коллиматор
(не показан)
наводится
излучение
лазерной системы
подсветки поз.
2. Затем с помощью
высокоточных
подвижек коллиматора
изображение
на его экране
совмещают с
центром перекрестия.
ЛОС поз. 2 штифтуют
штифтами поз.
10.
Затем
коллиматор
перемещается
в плоскости,
перпендикулярной
осям каналов,
в положение
для юстировки
ДТВ поз 1. В
автоколлимационном
режиме сборщик
получает изображение
блика от первой
оптической
поверхности.
Перемещая сб.
ед. в горизонтальной
плоскости
вручную (это
позволяют
выполненные
с зазором отверстия
плиты поз. 5), а
в вертикальной
– с помощью
установочных
винтов поз. 8,
добиваются
совпадения
изображения
блика с центром
перекрестия
экрана коллиматора.
Затем
сб. ед. штифтуют
Юстировку
НУТВ поз. 3 проводят
аналогично.
Точность
современных
коллиматоров
и их подвижек
(до 20’’) позволяет
легко добиться
отклонения
от параллельности
каналов
Величиной
не более 3’.
В завершение
на КТВС закрепляется
защитный кожух
поз. 4.
Вывод
Проведен
анализ вариантов
конструкции
КТВС, выбран
вариант с
раздельными
каналами для
дневной и ночной
работы прибора.
Проведен
анализ вариантов
конструкции
НУТВ, выбран
вариант со
структурой
Объектив+ЭОП+Объектив+ПЗС.
Разработана
конструкция
основных узлов
КТВС. В конструкцию
были внедрены
конструктивные
элементы,
позволяющие
провести юстировку
осей трех каналов
с точностью
до 3’ .
Технологическая
часть
Электронно-оптический
преобразователь
(ЭОП) — это устройство,
преобразующее
электронные
сигналы в оптическое
излучение или
в изображение,
доступное для
восприятия
человеком (или
другим приемником).
Термином ЭОП
называют устройство,
содержащее:
а) фотокатод,
преобразующий
слабые световые
потоки в потоки
электронов,
б) усилитель
этих электронных
потоков,
в) бомбардируемый
электронным
потоком люминесцентный
экран, на котором
воспроизводится
усиленное
изображение.
В проектируемом
приборе (КТВС)
используется
ЭОП 58 ЭГ
(ДТУА 433244.005 ТУ). В
качестве усилителей
электронных
потоков в таком
ЭОПе используется
микроканальная
пластина (МКП).
Для оборачивания
изображения
используется
волоконно-оптический
элемент с углом
поворота изображения
180° (ВОЭ180).
Эти детали
изготавливаются
на основе технологии
производства
волоконно-оптических
пластин (ВОП).
Рассмотрим
эту технологию
Общие
сведения об
оптических
волокнах и
изготовляемых
из них деталях
В соответствии
с физическими
и технологическими
ограничениями,
присущими
оптическим
волокнам, их
размеры колеблются
в пределах:
• диаметр жилы
- 5... 50 мкм;
• толщина оболочки
- 0,1...5 мкм. Оптические
волокна, как
правило, применяются
не в одиночку,
а в виде многоволоконных
структур, содержащих
до десятков
миллионов
отдельных
волокон, размещенных
вплотную друг
к другу. Плотность
укладки волокон
лежит в пределах
1500... 100000 волокон на
один квадратный
сантиметр.
Волоконные
жгуты, у которых
волокна скреплены
жестко только
по концам, являются
гибкими жгутами.
Волоконные
жгуты, у которых
волокна скреплены
жестко по всей
длине, являются
жесткими.
Жесткое соединение
отдельных
волокон в обоих
случаях производится
спеканием
оболочек, и
иногда при
помощи эпоксидных
смол.
Жгуты с упорядоченным
расположением
волокон (регулярной
укладкой), у
которых концы
каждого волокна
во входном и
выходном сечениях
занимают одинаковые
места, применяются
для передачи
изображения
без искажения
ее вида.
Волоконные
жгуты с неупорядоченным
расположением
волокон (нерегулярной
укладкой)
используются
только для
передачи оптического
сигнала (света).
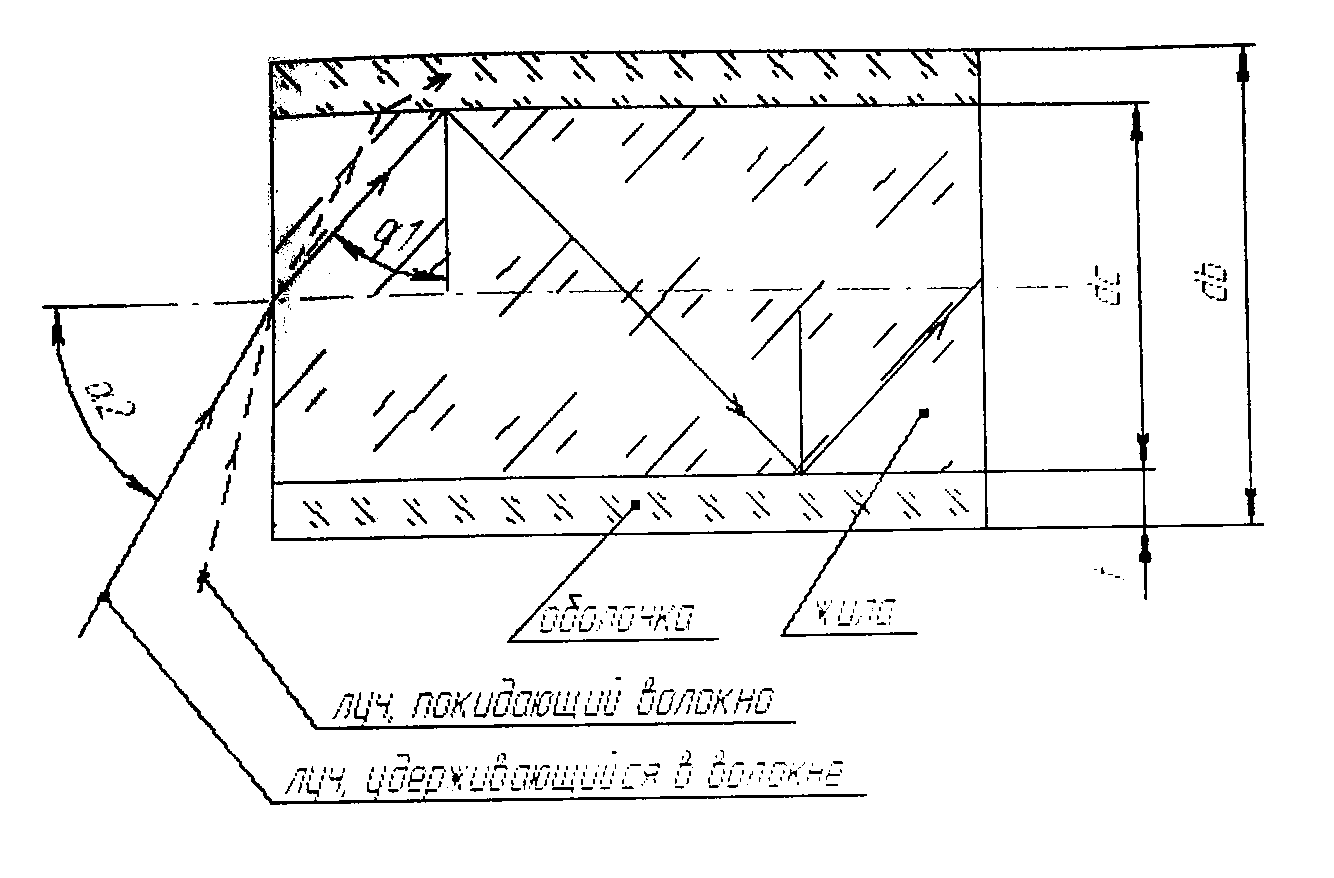
Рис.
15. Оптическое
волокно.
db
- диаметр волокна;
dc
- диаметр жилы;
t
- толщина оболочки;
db
= dc + 2t(43)
nl
- показатель
преломления
материала жилы;
n2
- показатель
преломления
материала
оболочки; nl>n2
αl
- угол полного
внутреннего
отражения;
sinαl
= n2/n1
(44)
α2-
наибольший
угол падения
луча на торец
жилы, соответствующий
предельному
углу полного
внутреннего
отражения;
sinα2
=
 (45)
(45)
Предварительно
изготовленные
заготовки в
производстве
волоконно-оптических
деталей применяются
следующих
видов: штабики,
трубки, кубики.
Это продиктовано
двумя методами
производства
волоконно-оптических
деталей:
• штабиковый
метод, где в
качестве заготовок
применяются
штабики и трубки,
и вытягивание
волокна осуществляется
с разогретого
до размягчения
торца штабика
и трубки;
• из
расплава, при
котором вытягивание
волокна производится
через фильеру,
и где в качестве
заготовки
применяются
кубики, подающиеся
в расплавленную
стекломассу.
К качеству
заготовок
предъявляются
очень высокие
гребования
по однородности
материала, по
отсутствию
таких дефектов,
как свиль, пузыри
и т. д. Например,
если в штабике
имеется свиль,
то при вытягивании
тонкого волокна
она также будет
вытянута, причем
на длину весьма
значительную
(измеряемую
километрами).
Это приведет
к браку законченного
изделия (так
как порок может
быть определен
только в готовом
изделии) и к
длительной
работе оборудования
"в холостую".
Так же дефекты
кубиков через
расплав могут
привести к
браку волоконно-оптические
изделия.
Изготовление
МКП
Технические
требования,
предъявляемые
к МКП
Согласно [7],
техническими
требованиями
являются.
Требования
к конструкции.
А) МКП должны
изготавливаться
по утвержденной,
конструкторской
и технологической
документации.
Б) Общий вид,
габаритные
размеры, геометрическая
структура МКП,
размера форма
и материал
проводящего
покрытия контактного
электрода
(далее КЭ) должны
соответствовать
чертежу "Микроканальная
пластина",
приведенному
в графической
части.
В) МКП должны
иметь форму
диска диаметром
32,85-0,1 мм.
Г) Расстояние
от края МКП до
контактного
электрода
должно быть
в пределах (0,3
- 0,8) мм.
Д) Диаметр круга
рабочей площади
МКП должен быть
не менее 26 мм.
Е) Толщина МКП
должна быть
в пределах
(0,305-0,335) мм. Отклонение
от параллельности
торцевых поверхностей
МКП (ГОСТ 24642-81) должно
быть не более
0,010 мм.
Ж) Номинальное
(среднее по
рабочей площади
МКП) значение
диаметров
каналов должно
быть в пределах
(7,5±0,5) мкм.
Разброс диаметров
каналов (коэффициент
вариации) в
пределах рабочей
площади МКП
должен быть
не более 1,6%.
З) Шаг структуры
каналов должен
быть не более
9,5 мкм.
И) Угол между
осью единичного
канала и нормалью
к плоскости
торца МКП должен
быть в. пределах
(4°-6°).
К) Глубина запыления
каналов слоем
контактного
электрода
должна быть:
на входе МКП
- в пределах
(0,3-0,8) диаметра
канала,
на выходе МКП
- в пределах (
1-2,5) диаметра
канала.
Л) Отклонение
от соосности
микроканальной
вставки МКП
(ГОСТ 24642-81) должно
быть не более
0,2 мм.
M) Ширина
монолитного
обрамления
(далее МО ) МКП
должна быть
не менее 1,6 мм.
Н) Отклонение
от плоскостности
(ГОСТ 24642 - 81) МКП
должно быть
не более 0,03 мм.
О) Расчетный
коэффициент
прозрачности
МКП после
металлизации
должен быть
не менее 0,59 со
стороны входа
МКП.
П) Масса МКП
должна быть
не более 1,0 г.
Требования
к внешнему виду
и оптическому
качеству
поверхностей.
А) Чистота торцевых
поверхностей
МКП (в терминах
и определениях
ГОСТ 11141-84) должна
соответствовать
требованиям,
указанным в
Таблице 2.
Б) Чистота фасок
и цилиндрической
поверхности
(образующей)
МКП должна
соответствовать
требованиям,
указанным в
Таблице 2.
Таблица 2:
|
Наименование
критерия
|
Допустимое
количество |
|
В рабочей
зоне Диаметром
6 мм |
В кольце
между рабочей
зоной и монолитным
обрамлением |
На монолитном
обрамлении |
|
вход |
выход |
вход |
выход |
вход |
выход |
|
Точки
и посторонние
частицы,
мм
|
|
| 0,015 и менее |
Не
нормируются |
| Св. 0,015 до
0,05 |
Не
допускаются |
5 |
Не
допускаются |
5 |
Не
допускаются |
Не
контролируются |
| Св. 0,05 до
0,1 |
Не
допускаются |
3 |
| Более
0,1 |
Не
допускаются |
| Царапины
шириной, мм |
|
| Св. 0,005 до
0,01 |
10 мм
Суммарная
длина |
15 мм
Суммарная
длина |
10 мм
Суммарная
длина |
10 мм
Суммарная
длина |
15 мм
Суммарная
длина |
15 мм
Суммарная
длина |
| Св. 0,01 до
0,015 |
Не
допускаются |
5 |
5 |
5 |
5 |
| Более
0,015 |
Не
допускаются |
| Отверстия
и следы от
электропробоя |
Не
допускаются |
| Забитые
каналы |
Не более
0,5% от общего
количества
каналов |
Таблица 3:
| Наименование
критерия |
Допустимое
количество,
шт. |
| Сколы
размером, мм |
|
| 0,1 и менее |
Не
нормируются |
| Св. 0,1 до
0,2 |
2 |
| Более
0,2 |
Не
допускаются |
В) Максимальный
линейный размер
и