Анализ гидроакустических сетей
процедура
гарантирует,
что узлы не
будут пытаться
использовать
нерабочие
соединения.
Таким образом,
избегаются
ненужные передачи,
которые увеличивают
потребление
батареи.
2.11 Протокол
доступа
Протокол
доступа системы
SeaWeb основан на
MACA протоколе,
который использует
обмен RTS-CTS-DATA. Сеть
использует
схему авто-повторений
stop-and-wait. Если источник
не может получать
CTS от адресата
после определенного
интервала
времени, то он
повторно высылает
RTS. Если после
К попыток передать
RTS, источник не
получает CTS, то
он принимает
решение, что
связь больше
не доступна
и возвращается
в спящее состояние
(отсутствие
излучения).
Если источник
получает CTS, то
он немедленно
передает пакет
данных. Обмен
RTS/CTS используется,
чтобы определить
состояние
канала, и в
дальнейшем
эта информация
используется,
чтобы установить
параметры
системы передачи
типа уровня
выходной мощности.
Квитанция,
высылаемая
адресатом после
получения
правильного
пакета данных,
обеспечивает
подтверждение
правильного
приема данных.
Протокол может
также обрабатывать
отрицательные
подтверждения
в зависимости
от режима операции,
выбранного
пользователем.
Если
два узла посылают
RTS друг другу,
могут происходить
ненужные повторения,
потому что оба
узла игнорируют
полученную
команду RTS. Каждый
узел будет
ожидать CTS пакет
в течение
определенного
промежутка
времени, и повторно
передавать
RTS пакеты. Эта
проблема решается
путем назначения
более высокого
приоритета
пакетом, которые
направлены
к главному
узлу.
3 Принципы технологии
АТМ
АТМ
(Asynchronous Transfer Mode) – это
асинхронный
метод транспортирования
информации.
Технология
АТМ дает возможность:
транспортировать
все виды информации
в виде пакетов
фиксированной
длины – ячеек;
выделять
пользователю
в каждый момент
времени только
того ресурса
пропускной
способности
сети, который
ему необходим;
поддерживать
интерактивные
(диалоговые)
службы и службы
распределения
информации,
а также службы
с установлением
и без установления
соединения;
передавать
как непрерывный,
так и пачечный
трафик, что за
счет мультиплексирования
позволяет
эффективно
использовать
сетевые ресурсы.
Особенность
технологии
АТМ состоит
в приспособленности
к транспортировке
по сети информации
любой службы,
независимо
от скорости
передачи, требований
к семантической
и временной
прозрачности
и пачечности
трафика ячеек.
При
осуществлении
АТМ осуществляется
последовательность
действий:
информация
в цифровом виде
разделяется
на блоки фиксированной
длины;
формируется
ячейка АТМ,
состоящая из
информации
пользователя
и заголовка;
ячейка
имеет фиксированную
длину – 53 байта,
причем 48 байт
– это информация
пользователя,
а 5 байт отводится
под заголовок.
При
выборе длины
ячейки АТМ
международные
организации
стандартизации
учитывали
следующие
факторы [8]:
задержка
при заполнении
пакета информацией
пользователя
(задержка при
пакетизации),
задержка в
очереди, задержка
на депакетизацию
и колебания
этих задержек
(джиттер) должны
быть невелики;
эффективность
использования
пропускной
способности
цифровых трактов;
сложность
реализации
выбранной
технологии.
От
каждого пользователя
формируется
последовательность
ячеек АТМ, причем
ячейки, принадлежащие
различным
пользователям,
могут следовать
в произвольном
порядке, в отличие
от синхронного
метода, где
каждый из временных
каналов должен
располагаться
на оси времени
на определенном
расстоянии
от начала цикла
дискретизации
[6]. Сущность
технологии
АТМ изображена
на рисунке 3.1.
На
рисунке 3.1 обозначено:
Яnm – n-ая ячейка
m-го пользователя
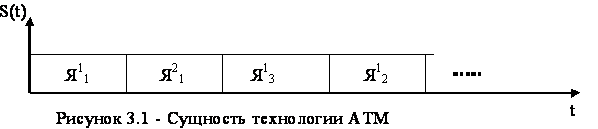
Последовательность
ячеек одного
пользователя
образует виртуальный
канал (ВК), а все
множество
виртуальных
каналов формирует
виртуальный
тракт (ВТ).
В АТМ
можно отметить
следующие
особенности
[8]:
отсутствие
защиты от ошибок
и управления
потоком данных
на уровне звена;
ориентация
на соединение;
ограничение
количества
функций, которые
несет заголовок
пакета АТМ;
относительно
небольшая длина
информационной
части ячейки.
Высокое
качество систем
передачи цифровых
трактов связи
и очень малые
значения вероятности
ошибки на бит
позволяют
отказаться
от обнаружения
и исправления
ошибок в пакете
на звеньевом
уровне. Отсутствие
на уровне звена
и управление
потоком данных
с целью исключения
перегрузок.
Но в
сетях АТМ не
всегда удается
установить
соединение.
Фазе передачи
информации
предшествует
фаза установления
виртуального
соединения,
во время которой
осуществляется
проверка
достаточности
объема сетевых
ресурсов, как
для качественного
обслуживания
уже установленных
виртуальных
соединений,
так и для создаваемого.
Отказ в установлении
соединения
оконечному
устройству
выдается в
случае недостатка
сетевых ресурсов.
После
завершения
фазы передачи
информации
виртуальное
соединение
разрушается,
а сетевые ресурсы
могут использоваться
для обеспечения
другого виртуального
соединения.
Таким образом,
за счет использования
режима переноса
информации,
ориентированного
на соединение,
и определения
размеров очередей,
осуществляется
контроль за
величиной
потерь пакетов
вследствие
переполнения
буферных устройств
коммутаторов.
Вероятность
потери пакета
в коммутационном
устройстве
в сетях АТМ не
превышает
значений 10^-8-10^-12
[8].
Для
уменьшения
временной
задержки пакета
в узлах коммутации
сети АТМ функции
заголовка
пакета значительно
ограничены.
Основной функцией
заголовка
является
идентификация
виртуального
соединения
с помощью
идентификатора
и обеспечение
гарантии правильной
маршрутизации.
При помощи
заголовка
возможно
мультиплексирование
различных
виртуальных
соединений
в одном цифровом
тракте.
Существует
явление эффекта
размножения
ошибок, когда
один искаженный
бит в заголовке
может привести
к утрате пакета
или к его доставке
не по адресу,
то есть к неправильной
маршрутизации.
С целью уменьшения
эффекта размножения
ошибок из-за
неправильной
маршрутизации
необходимо
в заголовке
пакета АТМ
обеспечить
обнаружение
и исправление
ошибок.
Обработка
заголовка
пакета АТМ –
процедура
достаточно
простая, так
как количество
функций, выполняемое
им, ограниченно.
Поэтому процедура
осуществляется
на высоких
скоростях, а
это обеспечивает
малую задержку
пакетов АТМ
в буферных
устройствах
коммутаторов
АТМ. Длина
информационного
поля ячейки
выбирается
относительно
небольшой для
уменьшения
размеров внутренних
буферов в узлах
коммутации
и ограничения
времени задержек.
Малые размеры
информационного
поля позволяют
получить небольшие
значения времени
задержки на
пакетизацию,
что по совокупности
с относительно
небольшими
размерами
буферных устройств
узлов коммутации,
обеспечивающих
незначительные
задержки и
колебания
задержки,
характеризуют
временную
прозрачность
сетей АТМ для
служб, функционирующих
в реальном
времени.
Форматы
ячеек определены
в Рекомендации
МСЭ-Т I.361 [6]. При этом
в отличие от
У-ЦСИО в Ш-ЦСИО
кроме интерфейса
“пользователь-сеть”
определен также
интерфейс
“сеть-сеть”,
который используется
и между узлами
коммутации
одной и той же
Ш-ЦСИО. Соответственно
имеются два
вида ячеек для
этих двух
интерфейсов,
которые отличаются
друг от друга
структурой
заголовка.
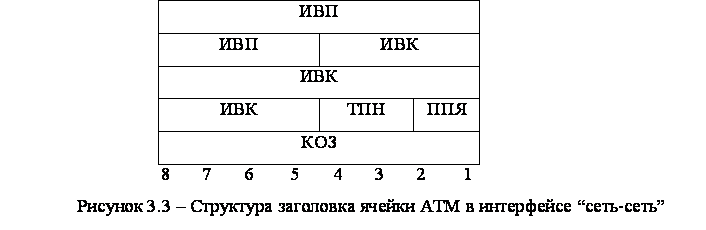
Структура
заголовков
в интерфейсах
“пользователь-сеть”
и “сеть-сеть”
приведены на
рисунках 3.2 и
3.3 соответсвенно.
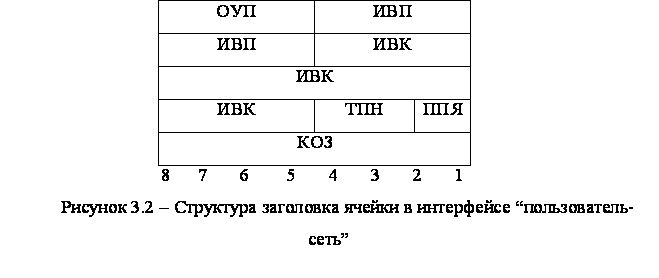
Заголовок
ячейки в интерфейсе
“пользователь-сеть”
имеет следующие
поля:
общего
управления
потоком (GFC –
Generic Flow Control) – ОУП длинною
4 бита;
идентификатора
виртуального
пути (VPI –Virtual Path Identifier) –
ИВП длинною
8 бит;
идентификатора
виртуального
канала (VCI – Virtual
Channel Identifier) – ИВК длинною
16 бит;
типа
полезной нагрузки
(PT – Payload Type) – ТПН длинною
4 бита;
приоритета
потери ячейки
(CLP – Cell Lass Priority) – ППЯ
длинною 1 бит;
контроля
ошибок в заголовке
(HEC – Header Error Control) – КОЗ
длинною 8 бит.
Структура
заголовка
ячейки в сетевом
интерфейсе
отличается
тем, что ОУП не
используется,
а биты ОУП отданы
полю идентификатора
виртуального
пути, длина
которого увеличена
до 12 бит.
Поле
общего управления
потоком (ОУП)
предназначено
для управления
нагрузкой в
соединениях
“пользователь-сеть”
с целью защиты
от перегрузок,
как в двухточечных,
так и в многоточечных
конфигурациях
доступа. Поле
ОУП используется
для контроля
нагрузки, создаваемой
оконечными
устройствами
пользователя,
но не используется
для управления
потоком, порождаемого
сетью.
Маршрутное
поле ячейки
состоит из
полей идентификатора
виртуального
пути (ИВП) и
идентификатора
виртуального
канала.
Поле
типа полезной
нагшрузки (ТПН)
используется
для идентификации
пользовательских
ячеек, ячеек
эксплуатации
и технического
обслуживания,
и управления
ресурсами.
Поле
приоритета
потери ячейки
(ППЯ) используется
для указания
явного приоритета
потери ячейки.
Если в поле
приоритета
потери ячейки
записана 1, то
данная ячейка
может быть
отброшена в
случае возникновения
перегрузок.
Если в поле ППЯ
записан 0, то
ячейка имеет
высокий приоритет
и должна быть
сохранена. Поле
потери ячейки
устанавливается
пользователем
или поставщиком
услуг.
Поле
контроля ошибок
в заголовке
(КОЗ) используется
для обнаружения
и исправления
ошибок в заголовке.
В протокольной
модели Ш-ЦСИО
имеются два
уровня, относящихся
к АТМ [6]:
уровень
АТМ, который
является общим
для всех видов
сервиса и
обеспечивает
возможность
передачи отдельных
ячеек;
адаптационный
уровень (AAL), зависящий
от вида сервиса.
Потоки
данных (в том
числе и речевая
информация,
представленная
в цифровом
виде) различных
классов поступают
на уровень
адаптации АТМ,
где подвергаются
обработке в
соответствии
с двумя функциями:
совмещения
потоков данных
(Convergence Subfunction – CS);
сегментации
или сборки
сегментов
данных при
поступлении
их с уровня АТМ
(Segmentation and Reassemble – SAR).
На уровне
АТМ осуществляются
генерация
(изъятие) заголовка
ячейки, модификация
в заголовке
ячейки ИВП и
ИВК, мультиплексирование
и демультиплексирование.
На физическом
уровне реализуются
следующие
основные функции:
вставка
и изъятие пустых
ячеек для
согласования
скорости передачи;
проверка
наличия ошибок
в заголовке;
синхронизация
битов при передаче
по физической
среде;
определяет
протокол размещения
ячеек для передачи
через физическую
среду в кадрах
различных
цифровых систем
передачи.
Таким
образом, благодаря
технологии
АТМ все коммутационное
оборудование
становится
однородным,
решающим для
всех видов
информации
одну и ту же
задачу быстрой
коммутации
фиксированных
пакетов, получивших
название ячеек,
и асинхронного
временного
разделения
ресурсов, при
котором множество
виртуальных
соединений
с различными
скоростями
асинхронно
мультиплексируются
в едином физическом
канале связи
– цифровом
тракте.
4 Быстрая
коммутация
пакетов
Организация
связи в распределенных
сетях базируется
на принципах
коммутации
и реализуется
в узлах, соединяющих
два или несколько
входящих и
исходящих
каналов в требуемых
направлениях
[5]. Классификация
видов коммутации
приведена на
рисунке 4.1.

 Рисунок
4.1 - Классификация
видов коммутации
Рисунок
4.1 - Классификация
видов коммутации
На рисунке
два основных
вида коммутации:
непосредственное
соединение
и соединение
с накоплением
информации.
При непосредственном
соединении
осуществляется
физическое
соединение
входящих в узел
коммутации
каналов с
соответствующими
адресу исходящими
каналами. При
соединении
с накоплением
сообщений
сигналы из
входящих в узел
коммутации
каналов сначала
записываются
в буферное
запоминающее
устройство
(БЗУ), а оттуда
через определенный
промежуток
времени поступают
в исходящие
каналы.
При
непосредственном
соединении
канал предоставляется
пользователю
на время сеанса
связи с момента
установления
соединения
до момента
завершения
работы и разъединения.
Коммутация
каналов – процедура
далеко не гибкая,
так как продолжительность
временного
интервала
однозначно
определяет
скорость передачи
в канале связи.
Если в качестве
основной принимать
самую высокую
скорость (которая
способна обеспечить
потребности
любой службы),
то в этом случае
служба, которой
необходима
значительно
меньшая скорость,
будет занимать
канал с высокой
скоростью на
все время соединения,
а это приводит
к очень низкой
эффективности
использования
сетевых ресурсов.
Поэтому обычная
коммутация
каналов не
используется
в Ш-ЦСИО.
Коммутация
сообщений и
коммутация
пакетов относятся
к соединению
с накоплением
информации.
В случае коммутации
сообщений все
сообщение
помещается
в БЗУ, а через
некоторый
промежуток
времени считывается
в исходящие
каналы в выбранном
направлении.
При коммутации
пакетов все
сообщения
разбиваются
в исходном узле
на сравнительно
небольшие
части, называемые
пакетами (при
использовании
АТМ – на ячейки
длинной 53 байта)
и затем эти
пакеты передаются
из одного узла
сети в другой.
Существует
два режима
передачи пакетов:
режим датаграмм
и режим виртуальных
каналов [5]. При
датаграмном
режиме каждый
пакет информации
содержит заголовок,
в котором указывается
адресная информация,
необходимая
для доставки
пакета, который
будет использоваться
узлом назначения
для сборки
сообщения.
Пакеты перемещаются
в сети совершенно
независимо
друг от друга,
при этом коммутатор
может изменить
маршрут какого-либо
пакета в зависимости
от состояния
сети - работоспособности
каналов и других
коммутаторов,
длины очередей
пакетов в соседних
коммутаторах
и так далее.
Метод датаграмм
удобен тем, что
не требует
предварительного
установления
соединения,
так как маршрут
выбирается
в процессе
передачи каждого
пакета, поэтому
не возникает
задержки перед
передачей
данных. Это
особенно удобно
для передачи
небольшого
объема данных,
когда время
установления
соединения
соизмерим со
временем передачи
данных.
Метод
быстрой коммутации
пакетов, который
используется
в Ш-ЦСИО, относится
к режиму передачи
пакетов по
виртуальному
каналу. В этом
случае перед
началом передачи
данных получателю
направляется
служебный
пакет, обеспечивающий
виртуальное
соединение
[5]. При этом маршрут
определяется
по таблице
маршрутизации,
а фиксация
маршрута
осуществляется
в таблицах
коммутации,
которые содержат
информацию
вида: пакеты
k-го виртуального
соединения,
пришедшие из
i-го канала, следует
направлять
в j-й канал. В памяти
управляющего
компьютера
существует
виртуальное
(условное)
соединение.
Дойдя до
абонента-получаетеля,
служебный пакет
запрашивает
у него разрешение
на передачу,
сообщив, какой
объем памяти
понадобится
для приема.
Если компьютер
располагает
такой памятью
и свободен, то
посылается
согласие
обоненту-отправителю
(также в виде
специального
служебного
пакета) на передачу
сообщения.
Получив подтверждение,
абонент-отправитель
приступает
к передаче
сообщения
обычными пакетами.
При
быстрой коммутации
пакетов ячейка,
поступившая
на вход коммутационной
системы, характеризуется
номером входного
виртуального
тракта и номером
виртуального
канала (поля
ИВТ и ИВК в
заголовке).
Быстрая коммутация
пакетов (БКП)
состоит в выполнении
следующих
действий:
системы
принятие входящей
ячейки;
чтение
заголовка
ячейки (определение
ИВТ и ИВК);
изменение
ИВТ и ИВК в заголовке
за счет обращения
к таблице коммутации,
информация
в которую записана
на этапе определения
маршрута;
добавление
к ячейке информации
о маршрутировании
в коммутационной
системе, которая
называется
заголовок
быстрого пакета;
таким образом
получают пакет
быстрой коммутации,
который поступает
на один из входов
коммутационной;
заголовок
быстрого пакета
самомаршрутизирует
пакет быстрой
коммутации
через коммутационную
систему и,
следовательно,
быстрый пакет
поступает на
требуемый
исходящий
виртуальный
тракт и исходящий
виртуальный
канал (согласно
таблице коммутации);
в выходном
контроллере
заголовок
быстрого пакета
изымается и,
таким образом,
быстрый пакет
обратно преобразуется
в ячейку.
Коммутаторы
пакетной сети
имеют буферное
запоминающее
устройство
для временного
хранения пакетов.
Это связано
с необходимостью
разнесения
во времени
быстрых пакетов,
одновременно
поступивших
на различные
входы и требующих
передачу на
один и тот же
выход.
Таким
образом, при
использовании
БКП время,
затраченное
на установление
виртуального
канала, компенсируется
быстрой последующей
передачей всего
потока пакетов.
Пакеты беспрепятственно
проходят друг
за другом по
виртуальному
каналу (в каждом
узле их ждет
инструкция,
которая обрабатывается
управляющим
компьютером)
и в том же порядке
попадают
абоненту-получателю.
5 Маршрутизация.
Основные определения
5.1 Общая
классификация
методов маршрутизации
Маршрут
– это список
узлов коммутации
от узла-источника
до узла-получателя.
Маршрутизация
– это набор
процедур, позволяющих
определить
оптимальный
маршрут по
заданным параметрам
на сети связи
между парой
узлов коммутации
[9].
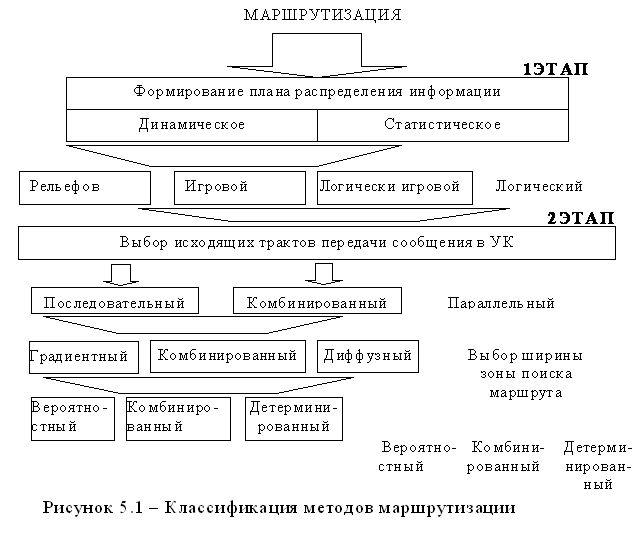
На рисунке
5.1 приведена
общая классификация
методов маршрутизации.
Маршрутизация
делится на [2]:
централизованную,
когда решающие
функции закреплены
за одним узлом,
который посылает
соответствующие
команды основным
узлам;
децентрализованную,
когда каждый
узел самостоятельно
выбирает маршрут
передачи (или
ее направление)
на основе собственной
информации.
В зависимости
от способа
формирования
таблиц маршрутизации
алгоритмы
маршрутизации
делятся на три
класса [2]:
алгоритмы
фиксированной
или статической
маршрутизации;
алгоритмы
простой маршрутизации;
алгоритмы
адаптивной
маршрутизации.
В алгоритмах
фиксированной
маршрутизации
все записи в
ТМ являются
статическими.
Все записи о
том, какой маршрут
выбран для
передачи пакетов
с теми или иными
адресами, заносятся
вручную самим
администратором
сети. если в
таблицу требуется
внести изменения,
например, при
отказе в какого-либо
маршрутизатора
в сети и возложении
его функций
на другой
маршрутизатор,
то они делаются
вручную. Различают
одномаршрутные
таблицы, в которых
для каждого
адресата задан
один маршрут,
и многомаршрутные
таблицы, определяющие
несколько
альтернативных
путей для каждого
адресата. В
многомаршрутных
таблицах должно
быть задано
правило выбора
одного из маршрутов.
Как правило,
один путь является
основным, а
остальные
резервные.
Такой алгоритм
маршрутизации
применим только
в небольших
сетях с простой
топологией,
или для работы
на магистральных
крупных сетях,
так как сама
магистраль
может иметь
простую структуру
с очевидными
наилучшими
путями следования
пакетов в подсети,
присоединенные
к магистрали.
В алгоритмах
простой маршрутизации
таблицы маршрутизации(ТМ)
или не используется,
или строится
без участия
протоколов
маршрутизации.
Существует
три типа простой
маршрутизации:
случайная
маршрутизация,
когда прибывший
пакет посылается
в первом попавшемся
случайном
направлении,
кроме исходного;
лавинная
маршрутизация,
когда пакет
широковещательно
посылается
по всем возможным
направлениям,
кроме исходного;
маршрутизация
по предыдущему
опыту, когда
выбор маршрута
осуществляется
по таблице, но
таблица строится
путем анализа
адресных полей
пакетов, появляющихся
на входных
портах.
Самыми
широко используемыми
являются алгоритмы
адаптивной
или динамической
маршрутизации.
Эти алгоритмы
обеспечивают
автоматическое
обновление
ТМ после изменения
конфигурации
сети. Протоколы,
построенные
на основе этих
алгоритмов,
позволяют всем
маршрутизаторам
собирать информацию
о топологии
связей в сети,
оперативно
обрабатывая
все изменения
конфигураций
связей.
К адаптивным
алгоритмам
маршрутизации
предъявляется
несколько
требований:
обеспечение
рациональности
маршрута;
простота
для того, чтобы
их реализация
не требовала
слишком много
сетевых ресурсов;
обладание
свойством
сходимости,
то есть достижение
однозначного
результата
за приемлемое
время.
Адаптивные
протоколы
обмена маршрутной
информацией
делятся на две
группы [10]:
дистанционно-векторные
алгоритмы (DVA
– Distance Vector Algorithms);
алгоритмы
состояния
связей (LSA – Link State
Algorithms).
В алгоритмах
дистанционно-векторного
типа каждый
маршрутизатор
периодически
и широковещательно
рассылает по
сети вектор,
компонентами
которого являются
расстояния
от данного
маршрутизатора
до всех известных
ему сетей. Возможна
и другая метрика,
учитывающая
не только число
промежуточных
маршрутизаторов,
но и время
прохождения
пакета по сети
между соседними
маршрутизаторами.
При получении
вектора от
соседа маршрутизатор
наращивает
расстояния
до указанных
в векторе сетей
на расстояние
до данного
соседа. Получив
вектор от соседнего
маршрутизатора,
каждый маршрутизатор
добавляет к
нему информацию
об известных
ему других
сетях, о которых
он узнал непосредственно
или из аналогичных
объявлений
других маршрутизаторов,
а затем снова
рассылает новое
значение вектора
по сети. Таким
образом каждый
маршрутизатор
узнает информацию
о всех имеющихся
в интерсети
сетях и о расстоянии
до них через
соседние
маршрутизаторы.
Дистанционно-векторные
алгоритмы
удобно использовать
в небольших
сетях. В больших
сетях они засоряют
линии связи
интенсивным
широковещательным
трафиком, к
тому же изменения
конфигурации
могут обрабатываться
по этому алгоритму
не всегда корректно,
так как маршрутизаторы
не имеют точного
представления
о топологии
связей в сети,
а располагают
только обобщенной
информацией
– вектором
дистанций,
полученной
через посредников.
Наиболее
распространенным
протоколом,
основанным
на DVA, является
протокол RIP (Routing
Internet Protocol).
Алгоритмы
состояния
связей обеспечивают
каждый маршрутизатор
информацией,
достаточной
для построения
точного графа
связей сети.
все маршрутизаторы
работают на
основании
одинаковых
графов, что
делает процесс
маршрутизации
более устойчивым
к изменениям
конфигурации.
Широковещательная
рассылка используется
только при
изменениях
состояния
связей, что
происходит
в надежных
сетях нечасто.
Вершинами графа
являются как
маршрутизаторы,
так и объединяемые
ими сети. Распространяемая
по сети информация
состоит из
описания связей
различных
типов: маршрутизатор-маршрутизатор,
маршрутизатор-сеть.
Чтобы
понять, в каком
состоянии
находятся линии
связи, маршрутизатор
периодически
обменивается
короткими
пакетами HELLO со
своими ближайшими
соседями. Этот
служебный
трафик тоже
засоряет сеть,
но в меньшей
степени, чем
протокол RIP, так
как пакеты
HELLO имеют намного
меньший объем.
5.2
Формирование
плана распределения
информации
В общем
случае маршрутизация
состоит из трех
этапов:
Формирование
и коррекция
плана распределения
информации
(ПРИ), то есть
таблиц маршрутизации
для каждого
узла коммутации;
Формирование
таблиц коммутации,
обеспечивающих
оптимальное
для каждой
службы маршруты
доставки сообщений
пользователей;
Передача
информации
пользователя.
Совокупность
таблиц маршрутизации
на сети называется
планом распределения
информации.
Считается, что
ПРИ задан, если
определены
все таблицы
маршрутизации
для каждого
узла коммутации.
Таблица маршрутизации
представляет
собой матрицу
Мi, в которой
число строк
равно N-1, где N –
число узлов
коммутации
сети (строка
в матрице Mi для
узла i не отводится),
а число столбцов
равно числу
соседних с
рассматриваемым
узлом коммутации
i узлов. Таблицы
маршрутизации
могут быть
составлены
по различным
критериям:
минимальное
количество
транзитных
узлов, минимальная
задержка при
передаче пакетов,
максимальная
надежность
и так далее.
Формирование
плана распределения
информации
может быть
централизованным,
распределенным
и комбинированным.
В первом случае,
сбор информации
и составление
таблиц маршрутизации
для всей сети
осуществляет
один узел, а
затем передает
эти таблицы
в каждый узел
коммутации.
При
распределенном
методе формирования
ПРИ каждый узел
коммутации
самостоятельно
составляет
таблицу маршрутизации,
собирая информацию
о состоянии
сети и топологии
связей. Однако,
в случае большой
распределенной
сети формирование
ПРИ таким образом
потребует
значительных
затрат времени
и ресурсов
сети. Поэтому
используют
комбинированный
способ формирования
ПРИ. При этом
структуру сети
делят на сегменты,
в каждом из
которых ПРИ
формируется
либо централизованным,
либо распределенным
способом.
Кроме
того ПРИ может
быть статическим
и динамическим.
Если ПРИ меняется
в процессе
эксплуатации
сети (то есть
происходит
переформирование
ПРИ), то ПРИ
называется
динамическим,
в противном
случае – статическим.
Динамические
методы формирования
ПРИ обеспечивают
автоматическое
обновление
таблиц маршрутизации
в дискретные
моменты времени.
В настоящее
время существует
три основных
способа формирования
плана распределения
информации:
метод рельефов,
игровой и логический
а также совмещенный
метод – логически-игровой.
Метод
рельефов.
При
использовании
метода рельефов
для каждого
узла коммутации
строится свой
рельеф, на основе
которого составляется
таблица маршрутизации.
Произвольно
выбирается
i-ый произвольный
узел сети для
формирования
i рельефа. Из
этого узла по
всем исходящим
трактам передачи
сообщения
пересылается
число 1. Все узлы,
в которые поступила
1, увеличивают
ее значение
на 1 (то есть
получаем 2). Теперь
уже эта 2 передается
во все исходящие
тракты. Эта
процедура
выполняется
до тех пор, пока
не будет охвачена
вся структура
сети. Таким
образом, получается
i рельеф.
Такой
рельеф строится
для каждого
узла. Для выбора
оптимального
маршрута, по
заданным критериям,
между i-ым узлом
и любым другим
нужно выбирать
наименьший
вес.
Достоинства
данного метода
в том, что имеется
полная информация
о состоянии
сети на момент
формирования
рельефа, можно
определить
исходящие линии
связи (ИЛС) не
только первого,
но и второго,
третьего и
последующего
выбора. Недостатки:
большая загруженность
сети, особенно
при динамическом
ПРИ, в случае
ввода в эксплуатацию
новых УК и в
случае загруженности
или неисправности
сети потребуется
переформировать
ТМ.
Игровой
метод.
Формирование
ПРИ происходит
по вероятности
установления
соединения
между заданной
парой узлов.
Перед началом
функционирования
сети устанавливается
начальный набор
ТМ. Каждому
значению элемента
в этой таблице
присваивается
некоторый
весовой коэффициент.
При поиске
маршрута к i-му
УК приходит
обращение к
i-ым строкам
ТМ. В i-ых строках
определяется
максимальный
весовой коэффициент
и следовательно
выбирается
исходящая ЛС.
Если в результате
маршрут между
заданной парой
узлов был определен,
то весовые
коэффициенты
данных исходящих
ЛС увеличиваются.
А если маршрут
не был найден,
то весовые
коэффициенты
уменьшаются.
После этого
строки, в которых
были изменены
элементы,
нормируются.
Достоинства
данного метода:
нет необходимости
передачи служебной
информации
при формировании
ПРИ, оптимизация
по критерию
– вероятность
установления
соединения
между парой
узлов. Отрицательные
же стороны –
это инерционность,
то есть при
выходе из строя
элементов сети
потребуется
некоторый
период времени
для переформирования
ТМ на сети, а
также необходимость
передачи служебной
информации
о переформировании
ТМ при вводе
в эксплуатацию
новых узлов.
Логический
метод.
В каждом
УК выполняется
процедура,
которая позволяет
определить
исходящую ЛС
максимально
близкий к
геометрическому
направлению
к узлу получателю.
Для этого вся
сеть связи
помещается
в прямоугольную
систему координат.
Каждому узлу
присваиваются
свои координаты
(x,y). Затем происходит
вычисление
геометрического
направления
на заданный
узел, путем
сравнения своих
координат с
координатами
узла получателя.
После этой
процедуры
выбирается
та ЛС, которая
имеет наибольшее
совпадение
с вычисленным
геометрическим
направлением.
Достоинства:
отсутствие
служебной
информации,
простота алгоритма
вычислений
исходящей ЛС
позволяет
уменьшить объем
оперативной
памяти, так как
нет необходимости
использовать
ТМ, упрощается
процедура
маршрутизации
и ввода в эксплуатацию
новых узлов.
Недостатки:
при выходе из
строя элемента
сети, то это
явление не
будет отмечено
никакой информацией,
так как этот
метод не является
динамическим,
не учитываются
возможности
ранее забракованных
из-за загруженности,
но более предпочтительные
направления.
Логически-игровой
метод
Логически-игровой
метод – это
объединение
двух методов:
логического
и игрового.
Данный метод
вобрал в себя
достоинства
обоих методов:
отсутствие
необходимости
передачи служебной
информации
на сети при
формировании
(во время ввода
в эксплуатацию
УК), и переформирования
уже в процессе
эксплуатации
УК таблиц
маршрутизации.
А так же решение
задач глобальной
оптимизации
сети связи по
критерию –
формирование
ПРИ по накопленной
ранее статистике
установления
соединения
между заданной
парой УК.
Логически-игровой
метод заключается
в том, что сеть
вводится в
прямоугольную
систему координат
(логический
метод), в соответствии,
с которой каждому
узлу сети
присваивается
собственный
адрес (X,Y), и использует
ранее накопленную
статистическую
информацию
о состоявшихся
разговорах
(игровой метод).
Следовательно,
логический
метод используется
при вводе нового
УК в эксплуатацию.
В каждом УК
сети имеется
матрица, которая
имеет следующий
вид (таблица
5.2.1). Данная матрица
содержит SN строк.
Учитывая возможное
увеличение
числа УК на
сети, SN выбирают
таким, чтобы
SN>J.
Количество
столбцов матрицы
PN(j) для УК под
номером j равно:
(Hj + 3), где Hj –число
исходящих ЛС
из j- го узла; три
столбца отводится
для номеров
УП, представленных
о общепринятой
нумерации (№
УП) и прямоугольной
системе координат
(X,Y).
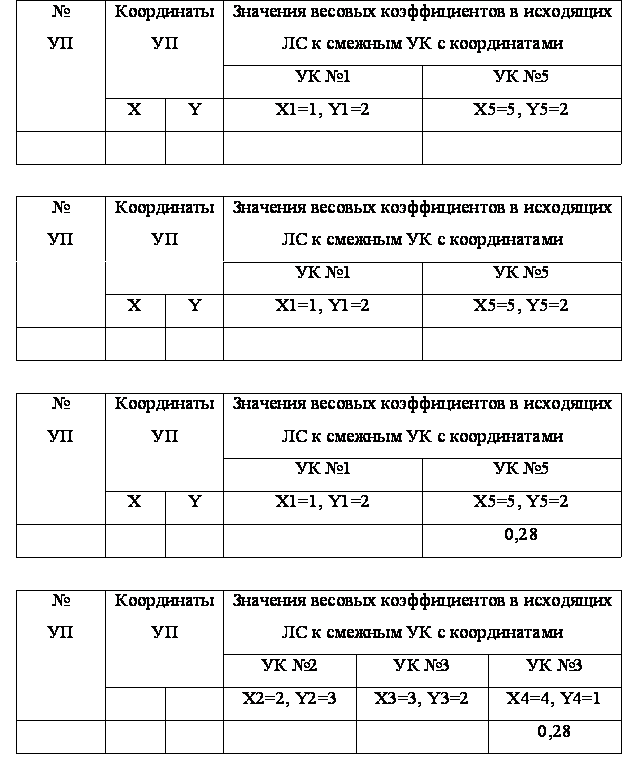
На момент
ввода узла в
эксплуатацию
матрица содержит
только информацию
о смежных номерах
УК с данными,
выраженных
в прямоугольной
системе координат
(т. е. координаты
смежных УК). По
мере функционирования
сети связи
матрица заполняется
и корректируется.

Определение
исходящей ЛС
осуществляется
логическим
методом, а заполнение
и корректировка
матрицы – игровым
методом.
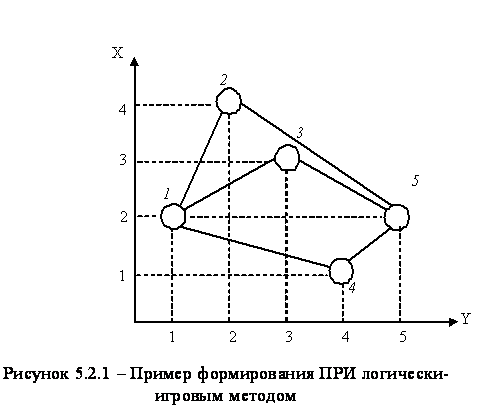
Рассмотрим
пример формирования
ПРИ на сети
логически-игровым
методом. Вложим
структуру сети
в прямоугольную
систему координат
(X,Y) (рисунок 5.2.1).
Будем считать,
что УП № 1, 2, 3, не
эксплуатировались,
поэтому их
матрицы содержат
информацию
только о смежных
узлах и имеют
вид:
| №УП |
Координаты
УП |
Значения
весовых коэффициентов
в исходящих
ЛС к смежным
УК с координатами |
|
|
УК №1 |
УК №5 |
|
X |
Y |
X1=1, Y1=2 |
X5=5, Y5=2 |
|
|
|
|
|
| №УП |
Координаты
УП |
Значения
весовых коэффициентов
в исходящих
ЛС к смежным
УК с координатами |
|
|
УК №1 |
УК №5 |
|
X |
Y |
X1=1, Y1=2 |
X5=5, Y5=2 |
|
|
|
|
|
| №УП |
Координаты
УП |
Значения
весовых коэффициентов
в исходящих
ЛС к смежным
УК с координатами |
|
|
УК №1 |
УК №5 |
|
X |
Y |
X1=1, Y1=2 |
X5=5, Y5=2 |
|
|
|
|
0,28 |
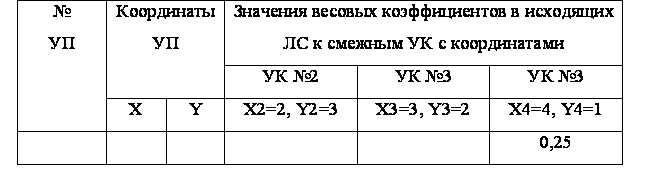
| №УП |
Координаты
УП |
Значения
весовых коэффициентов
в исходящих
ЛС к смежным
УК с координатами |
|
|
УК №2 |
УК №3 |
УК №3 |
|
|
|
X2=2, Y2=3 |
X3=3, Y3=2 |
X4=4, Y4=1 |
|
|
|
|
|
0,28 |
Допустим,
что от пользователя
УК № 2 с координатами
X2=2, Y2=3 поступила
заявка на организацию
маршрута к УП
№ 1 с координатами
X1=1, Y1=2. Причем, количество
транзитных
узлов не должно
превышать двух
Этап
1. В УК № 2 на основе
анализа координат
смежных узлов
(X1,Y1; X5,Y5) и координат
УП (X1,Y1) делается
вывод: исходящие
ЛС к УК № 1 и УК
№ 2 являются
ИЛС первого
и второго выбора.
Так как УК № 2
не эксплуатировался
и не имеет статистике
по организации
маршрутов в
предыдущие
моменты времени,
то первоначальные
весовые коэффициенты
исходящих ЛС
будут одинаковыми
и равными Ѕ.
Однако, предпочтительность
выбора исходящих
трактов сохраняется
и соответствует
результатам
анализа координат
данного узла
и УП.
Предположим
что исходящий
тракт первого
выбора в данный
момент времени
не доступен.
Тогда проверяется
ситуация доступности
исходящего
тракта второго
выбора. Исходящая
ЛС УК № 5 с координатами
Х5=5, У5=2 доступен.
Следовательно
данный тракт
участвует в
организации
данного маршрута.
Этап
2. В УК № 5 (Х5=5, У5=2)
производится
анализ координат
смежных УК и
определение
исходящих ЛС
первого, второго
и третьего
выбора. Ими
будут исходящие
ЛС к узлу УК №
3 и 4. с целью избежания
зацикливания
маршрутов ИЛС
к УК № 2 из данной
процедуры
исключен.
Учитывая,
что узел № 5 не
имеет статистики
организации
маршрутов, то
первоначальные
весовые коэффициенты
исходящей ЛС
будет одинаково
и равно Ѕ.
Предпочтительность
выбора остается
за исходящим
трактом к УК
№ 3, т.к.