Средства постановки помех и помехозащиты радиолокационной станции
Размещено
на /
Министерство
общего и профессионального
образования
Российской
Федерации
РГРТУ
Кафедра
РТС
ПОЯСНИТЕЛЬНАЯ
ЗАПИСКА
К
КУРСОВОМУ
ПРОЕКТУ ПО
ДИСЦИПЛИНЕ
«Теоретические
основы радиоэлектронной
борьбы»
на
тему:
«Средства
постановки
помех и помехозащиты
РЛС»
Выполнил:
Cт.
гр. 211
Гирич
А.А.
Проверил:
Кошелев
В.И.
Рязань
2006
Содержание
Введение
1.
Анализ задачи
и ее формализация
2.
Расчет параметров
помехопостановщика
2.1
Расчет мощности
передатчика
заградительной
и прицельной
помех
2.2
Расчет параметров
средств создания
уводящих помех
2.3
Расчет параметров
средств создания
пассивных помех
3.
Расчет параметров
средств помехозащиты
3.1
Средства защиты
от пассивных
помех
3.2
Средства защиты
от активных
помех
3.2.1
Защита от
заградительных
и прицельных
помех
3.2.2
Защита от уводящих
помех
4.
Анализ эффективности
применения
комплекса помех
и средств
помехозащиты
5.
Оценка требований
к аппаратно-программным
ресурсам средств
конфликтующих
сторон
6.
Выбор и технико-экономическое
обоснование
технологической
базы для реализации
проекта
7.
Составление
структурной
схемы устройства
и описание ее
работы
Заключение
Список
использованных
источников
Введение
В современных
условиях развитие
и использование
вооружений
и военной техники
(ВиВТ) характеризуются
высокой насыщенностью
их радиоэлектронным
оборудованием,
обеспечивающим
решение задач
автоматического
или автоматизированного
ведения разведки,
связи, управления
и наведения
оружия. Создаются
глобальные
стратегические
и тактические
системы разведки,
а также высокоточное
оружие (ВТО),
обеспечивающее
автоматический
выбор и поражение
гражданских
и военных объектов.
В настоящее
время ВТО позволяет
оперативно
с минимальными
потерями уничтожить
большинство
наземных, морских,
воздушных, а
в ближайшем
будущем и космических
целей. Альтернативой
снижения
эффективности
оружия поражения
является разрушение
информационных
каналов ВиВТ.
Для решения
этих задач
применяются
средства РЭБ,
которые обеспечивают
блокирование
информационных
каналов разведки,
связи, управления
и наведения
ВиВТ путем
создания достаточного
уровня электромагнитной
мощности помех,
спектральные
характеристики
которых должны
быть оптимальными
для конкретных
сигналов
информационных
каналов, подлежащих
подавлению.
Появление
средств РЭБ
было обусловлено
появлением
радио, которое
на первоначальном
этапе своего
развития
использовалось
как средство
связи. В 1905 г. во
время русско-японской
войны радистами
русского флота
впервые в мире
было успешно
реализовано
создание активных
помех радиоканалам
связи японских
кораблей.
Дальнейшее
развитие
радиотехники,
расширение
области применения
электромагнитных
волн, особенно
в системах
измерения
дальности –
радиолокации,
привело к
необходимости
разработки
теории и технологии
создания средств
РЭБ.
1.
Анализ и формализация
задачи
Задача
выбора конкретных
средств радиоэлектронного
подавления
(РЭП) базируется
на основе имеющейся
информации
о тактико-технических
характеристиках
РЛС противоположной
стороны. Напротив,
при выборе
характеристик
систем помехозащиты
необходимы
некоторые
априорные
сведения о
типах помех,
которые вероятно
будут применяться,
и их энергетических
параметрах.
Таким образом,
для проектирования
систем, участвующих
в радиоэлектронном
конфликте,
важно наличие
достоверной
информации
о технических
средствах
противника.
Определим
период повторения
зондирующего
сигнала (ЗС) ТП
для однозначного
определения
дальности до
R=250 км:
 мкс.
мкс.
Пусть
разрешающая
способность
по дальности
DR= 300
м, а длительность
импульса
 мкс.
мкс.
Ширина
полосы пропускания
приемного
устройства
РЛС:
 кГц.
кГц.
Число
каналов РЛС
по скорости
mV при
обработке
полученной
информации
по алгоритмам
быстрого
преобразования
Фурье равно
числу импульсов
в принимаемой
пачке радиосигналов
N: mV=N=24.
Будем
считать, что
количество
угловых каналов:
по азимуту
ma=360,
по углу места
mb=4.
Установим
величину ложной
тревоги на
каждый из каналов
F1=10-12. Вероятность
ложной тревоги
РЛС будет
определяться
по известной
формуле: F=F1ЧmRЧmVЧmaЧmb
= 10-12Ч500Ч24Ч360Ч4
»
1.7Ч10-5.
Потребуем,
чтобы вероятность
правильного
обнаружения
равнялась
D=0,9.
Определим
пороговое
отношение
сигнал/шум
qПОР, при
котором обеспечиваются
заданные параметры
обнаружения.
Поскольку
принимаемая
пачка из N
импульсов
является когерентной,
то
 .
.
2.
Расчет параметров
помехопостановщика
2.1
Расчет мощности
передатчика
заградительной
и прицельной
помех
помеха
помехозащита
радиолокационная
станция
Можно
выделить несколько
основных типов
передатчиков
заградительных
помех: прямошумовые
передатчики;
передатчики
помех, использующие
мощный источник
ВЧ колебаний,
модулируемых
по частоте
смесью периодического
сигнала и шума;
передатчики
синхронных
импульсных
шумовых помех,
а также передатчики,
излучающие
очень короткие
импульсы.
Применение
заградительных
АП для подавления
средств радиолокационного
наблюдения
противника
обычно осуществляется
при доподлинно
не известной
их рабочей
частоте (длине
волны). Поэтому
ширина частотного
диапазона
средств помехопостановки
выбирается
много большей
полосы пропускания
приемника РЛС
с таким расчетом,
чтобы предполагаемый
интервал частот
ЗС полностью
перекрывался.
Рассчитаем
пороговую
мощность отраженного
сигнала на
входе РЛС, при
которой обеспечиваются
заданные
характеристики
обнаружения
(D и F).
Будем считать,
что отраженный
от цели сигнал
подвергается
согласованной
фильтрации.
Максимально
достижимое
отношение
сигнал/шум на
выходе согласованного
фильтра по
мощности составляет
qMAX=E/N0,
где Е – энергия
сигнала, N0
– спектральная
мощность белого
шума в приемнике
РЛС.
N0=KШЧkЧT0,
где
k = 1,3810-23 – постоянная
Больцмана, Т0
= 290 К – температура
антенны, КШ
– коэффициент
шума, определяемый
типом усилительного
элемента в
приемнике. Для
лампы бегущей
волны КШ=5.
Тогда N0=5Ч1,38Ч10-23Ч290
= 2Ч10-20
Вт/Гц. Для обеспечения
порогового
значения величины
сигнал/шум
мощность отраженного
сигнала на
входе приемника
равна

Определим
минимальную
мощность передатчика
РЛС, при которой
еще достигаются
заданные D
и F на дальности
до цели R=250
км.
Из
основного
уравнения
дальности
активной радиолокации
выразим
мощность передатчика
 =
= .
.
Затухание
радиоволн в
атмосфере
начинает сказываться
при λ<30
см и зависит
от длины волны
радиосигнала
и влажности
атмосферы на
трассе распространения
радиоволн. Так,
для волн с l=3
см его величина
для высот 0ё22,5
км составляет
10-2..4Ч10-5
дБ/км и линейно
уменьшается
с увеличением
высоты. Определив
среднее затухание
как
 дБ/км,
дБ/км,
получим
из формулы для
реальной дальности
действия РЛС
 ,
,
где
R0 – дальность
действия при
отсутствии
затухания, что
при R0=250 км
выполняется
соотношение
R»R0,
а, следовательно,
в дальнейших
расчетах затуханием
можно пренебречь.
Чтобы
найти мощность
постановщика
заградительных
активных помех
(ПАП), следует
первоначально
задать минимальную
дальность
обнаружения
РЛС в случае
применения
помех RMIN.
Определим
RMIN=0.2ЧR=0.2Ч250=50
км. Поскольку
ПАП в общем
случае действует
по боковым
лепесткам
антенны РЛС,
то мощность
постановщика
помех выражается:
 ,
,
где PРЛС
– мощность РЛС;
РПАП
– мощность ПАП;
GРЛС
– коэффициент
усиления антенны
РЛС;
GПАП
– коэффициент
усиления антенны
ПАП;
DfАП
– полоса частот,
занимаемая
ПАП;
DfПР
– полоса пропускания
(ПП) приемника
РЛС;
k’
– коэффициент,
учитывающий
несовпадение
поляризации
РЛС и ПАП;
kП
– коэффициент,
показывающий
величину подавления
помехи в системе
обработки
приемника РЛС;
КБЛ –
уровень боковых
лепестков
нормированной
ДН антенны РЛС;
РСвх/РПвх
- отношение
сигнал/помеха
на входе приемника.
Если
самолет-ПАП
находится на
границе зоны
обнаружения
(RПАП=250 км),
предполагаемое
значение kП=0,01
(-40 дБ), k’=0,5,
DfАП/Dfпр=50,
GПАП=100,
КБЛ=0,05, и задано
отношение РС
ВХ/РП ВХ = 0,1
то
РПАП=1800Ч104Ч2Ч(250Ч103)2Ч50
/ (4ЧpЧ0,5Ч(50Ч103)4Ч100Ч0,052Ч0,01Ч0,1)
= 1146 кВт.
Передатчик
помех такой
мощности сложно
реализовать
даже в стационарном
наземном исполнении,
а возможность
его размещения
на современных
ЛА исключена.
Если в
радиоэлектронном
конфликте все
же необходимо
присутствие
постановщика
заградительных
помех, то можно
выбрать структурную
схему с групповыми
передатчиками
[1]. Ее достоинствами
являются
функциональная
простота и
способность
перекрытия
весьма широкой
полосы частот.
Однако последнее
может оказаться
и недостатком,
если передатчики
подавляемых
средств имеют
очень большую
мощность.
Структурная
схема группового
передатчика
приведена на
рис. 1. В нем задействован
один источник
шума с двумя
усилителями
на лампе бегущей
волны (ЛБВ) и
две одинаковые
антенны. Суммарная
диаграмма
направленности
зависит от
величины разнесения
антенн и имеет
довольно узкий
луч.



Рис.
1.
Основными
недостатками
заградительных
активных помех
являются сложность
создания мощных
широкополосных
передатчиков
(обычно DfАП>>DfПР)
и нерациональное
использование
их энергии
(большая ее
часть бесполезно
расходуется
на прикрытие
участков диапазона
частот, не
используемых
РЛС). Такие помехи
обычно применяют
при неизвестных
параметрах
ЗС подавляемой
РЛС.
Для
радиоэлектронного
подавления
РЛС обнаружения
наряду с передатчиками
заградительных
помех используются
передатчики
прицельных
шумовых помех
(ППП). Эти устройства
представляют
собой узкополосные
перестраиваемые
по частоте СВЧ
– генераторы,
модулируемые
по амплитуде
или частоте
шумами или
периодическим
сигналом, либо
их комбинацией.
Вариант структурной
схемы передатчика
прицельных
шумовых помех
на лампе обратной
волны (ЛОВ) приведен
на рис. 2.


Настройка
по частоте
Рис.
2.
У
ППП DfАП
соизмерима
с DfПР
.
Если
DfАП/DfПР=2,
то
РПАП=1800Ч104Ч2Ч(250Ч103)2Ч2/(0,5Ч(50Ч103)4Ч1000Ч4ЧpЧ0,052Ч0,01Ч0,1)=46
кВт.
Поскольку
отстроится
от прицельной
помехи в РЛС
можно путем
перехода на
«запасные»
рабочие частоты,
то следует
также предусмотреть
возможность
постановки
скользящей
по частоте
помехи. В этом
случае осуществляется
перестройка
частоты передатчика
шумовых помех
в пределах
fMINёfMAX
по пилообразному
или псевдослучайному
закону.
Эффективность
применения
скользящей
по частоте
помехи можно
оценить по
отношению
времени пребывания
помехи в ПП
приемника к
периоду повторения
частоты. Вероятность
подавления
РЛС Р определяется
выражением:
Р=1-(1-1/Q)n,
где Q
– отношение
времени перестройки
частоты помехи
в заданном
диапазоне
частот ко времени
прохождения
помехой ПП
приемника
подавляемой
РЛС, n – число
передатчиков
помех. Если
Q=10 и n=10,
то Р=1-(1-1/10)10»0,65.
Принимая время
перестройки
частоты передатчика
прицельной
помехи от fmin
до fmax
равным ТПОМ=100
мкс, рассчитаем
скорость перестройки
по частоте:
a=QЧП/ТПОМ=10Ч300/100Ч10-6=30
кГц/мкс.
Ширину
диапазона
перестройки
следует выбирать
с таким расчетом,
чтобы он перекрывал
вероятные
значения «запасных»
частот РЛС.
2.2
Расчет параметров
средств создания
уводящих помех
Уводящие
помехи (УП) относятся
к классу активных
помех (АП). Их
применение
приводит к
перегрузке
устройств
обработки
информации
РЛС и срыву
сопровождения
целей. Идея
использования
УП основана
на генерации
мощных ответных
помех с изменяющимися
по определенному
закону интервалом
задержки (УП
по дальности),
частотой (УП
по скорости)
или обоими
параметрами
(УП по дальности
и скорости).
Постановка
УП включает
в себя два этапа:
1). На
дальности,
соответствующей
реальной цели,
формируется
мощная ответная
помеха. Ее прием
приводит к
срабатыванию
системы автоматической
регулировки
усиления (АРУ)
приемного
устройства
РЛС, а затем к
захвату ложной
цели и срыву
сопровождения
реального
воздушного
объекта.
2). В
каждом такте
зондирования
у ответной
помехи изменяется
временная
задержка и/или
частота, что
приводит к
эффекту сопровождения
маневрирующего
объекта.
Скорость
увода не должна
превышать
максимально
возможную
скорость перестройки
строба дальности
РЛС, в противном
случае следящая
система автоматически
сбросит с
автосопровождения
сигнал помехи.
Основным
способом защиты
РЛС от уводящих
помех по дальности
и скорости
является
использование
пороговых
алгоритмов,
вычисляющих
рассогласование
характеристик
движения целей,
определяемых
на основе оценок
скорости по
доплеровскому
сдвигу частот
и дифференцирования
текущих значений
дальности до
цели. Обнаружение
рассогласования
позволяет
своевременно
производить
сброс сопровождения
УП и автоматический
перезахват
сигнала реальной
цели. Различают
следующие
критерии:
дальностный
пороговый
 ,
,
скоростной
пороговый

и
пороговый по
ускорению
 ,
,
где
константы
СпорR,
СпорV,
СпорА – величины
порогов принятия
решений о наличии
воздействия
УП. Величины
порогов выбираются
с таким расчетом,
чтобы ошибки
измерения
соответствующих
величин (дальности,
скорости и
ускорения) не
приводили к
частым ложным
тревогам.
В
связи с этим
обстоятельством
для эффективного
подавления
РЛС на постановщике
уводящих помех
необходимо
согласование
параметров
УП по дальности
и скорости.
Пусть
требуется
создание ложной
цели (ЛЦ), движущейся
с ускорением.
Уравнение
движения ЛЦ:
х(t)
= ±аЧt2/2
±
VЧt+x0,
где х0 –
начальное
положение ЛЦ,
V и а – ее
радиальные
скорость и
ускорение
соответственно.
Для создания
такой ЛЦ необходимо
вырабатывать
мощную ответную
помеху с изменяющимся
во времени
интервалом
задержки tЗ(t).
Интервал задержки
для определенного
ранее уравнения
движения запишется:
tЗ(t)=2Чx(t)/c
или
tЗ(t)=
 aЧt2/c
2ЧVЧt/c
+ t0,
aЧt2/c
2ЧVЧt/c
+ t0,
где t0=2Чx0/c
– начальное
значение интервала
задержки. Смена
знака перед
выражениями,
содержащими
скорость и
ускорение ЛЦ,
связана с уменьшением
времени задержки
отраженного
сигнала при
«приближении»
ЛЦ к РЛС и увеличением
при ее «удалении»
соответственно.
Поскольку
в подавляемой
РЛС может быть
предусмотрено
однозначное
определение
скорости по
доплеровскому
сдвигу частот
принимаемого
сигнала, необходимо
учесть данное
обстоятельство
при создании
УП. Частота
излучаемого
постановщиком
УП сигнала
должна меняться
по закону
f(t)=f0±2Ч(V+aЧt)Чf0/c,
где f0
= c/l
– рабочая частота
РЛС (при этом
угол между
вектором
скорости/ускорения
и радиальным
направлением
на РЛС полагается
равным нулю).
При
создании УП
следует отводить
некоторый
временной
промежуток
t1 на срабатывание
системы АРУ
приемника РЛС
и захват мощной
ответной помехи.
Поэтому окончательные
законы изменения
времени задержки
и частоты УП
соответственно
представимы
в виде
 ;
;
 ,
,
где
TУП – время,
отводимое на
постановку
помехи.
Предположим,
на некоторой
дальности R
необходимо
создание ЛЦ,
имеющей начальную
скорость V=600
м/с и ускорение
а=0,5Чg=4,9
м/с; время, отводимое
на постановку
УП, составляет
ТУП=5 с, из них
в течение t1=0,5
с характеристики
ответной помехи
не изменяются.
Произведем
оценку эффективности
применения
УП с выбранными
параметрами.
Максимально
достижимая
дальность
увода:
Smax
= aЧ(ТУП-t1)2/2+VЧ(ТУП-t1)=4,9Ч(5-0,5)2/2+600Ч(5-0,5)=2750
м,
то
есть цель уводится
из дальностного
канала с номером
N1 в канал
N2=N1±5.
Структурная
схема передатчика
УП, согласованных
по дальности
и скорости,
приведена на
рис. 3.
2.3.
Расчет параметров
средств создания
пассивных помех
Различают
пассивные
помехи естественного
происхождения
и организованные.
К организованным
пассивным
помехам относят
отражения от
облаков дипольных
отражателей,
аэрозолей или
ионизированных
частиц, а также
отражения от
ложных целей.
Особенностью
пассивных помех
является появление
их только при
работе передатчиков
радиолокаторов
и значительное
превышение
мощности помехи
над мощностью
собственных
шумов приемника
[2].





Рис.
3.
Одним
из первых, нашедших
практическое
применение
средств создания
пассивных
маскирующих
помех РЛС, являются
дипольные
отражатели.
Сбрасываемые,
например, с
самолетов
дипольные
отражатели
разносятся
ветром и образуют
протяженное
отражающее
облако. В результате
на экранах
незащищенных
РЛС образуется
интенсивная
засветка, маскирующая
цели в пределах
облака диполей.
Длину
диполя l
обычно выбирают
несколько
меньше половины
длины волны
l: l=(0,46..0,48)Чl.
Заготовленные
диполи укладывают
в специальные
пакеты или
капсулы и при
необходимости
маскировки
объекта выбрасывают
или выстреливают
их в атмосферу.
В облаке диполей
их ориентация
становится
произвольной,
поэтому средняя
ЭПР диполя
составляет
S0=0,17Чl2.
Для образования
облака с ЭПР,
не меньшей ЭПР
маскируемой
цели Е, в упаковке
должно быть
примерно nУП=Е
/ S0=2/0,17Ч0,032=13000
диполей.
Если
подавляемая
РЛС может ослаблять
мощность пассивных
помех в kП
раз, то число
диполей в пачке
(или число
одновременно
сбрасываемых
пачек) нужно
также увеличить
в kП раз.
Предполагая,
например, kП=100
(40 дБ), получим
nУП’ =
nУПЧkП=13000Ч100=1.3
млн. диполей.
Для обеспечения
ЭПР пассивной
помехи, большей
Е, необходимо
дальнейшее
увеличение
числа сбрасываемых
диполей.
3. Расчет
параметров
средств помехозащиты
3.1
Средства защиты
от пассивных
помех
Борьба
с пассивными
помехами требует,
прежде всего,
ослабления
мощности мешающих
отражений,
принимаемых
антенной
радиолокатора,
и сужения
динамического
диапазона помех
для предупреждения
перегрузки
приемного
тракта. Первая
из указанных
задач наиболее
часто встречается
тогда, когда
наземный радиолокатор
должен обнаруживать
воздушные цели,
например в
системах УВД.
Полезный
сигнал выделяется
на фоне пассивных
помех путем
либо подавления
сигналов, неизменных
по амплитуде
от периода к
периоду повторения,
либо путем
режекции в
спектре составляющих,
кратных частоте
повторения.
Для этого
используются
режекторные
гребенчатые
фильтры (РГФ),
реализуемые
в виде алгоритмов
или устройств
череспериодного
вычитания
(ЧПВ), череспериодной
компенсации
(ЧПК), а также
алгоритмов
фильтровых
систем или
наборов (гребенок)
фильтров.
Структура
простейшего
однозвенного
фильтра ЧПК
приведена на
рис. 4.
Его АЧХ
описывается
выражением
К(f)=2Чкsin(pЧfЧTП)ч.
Из
– за периодического
повторения
на частотной
оси полос режекции
АЧХ возникает
явление так
называемых
слепых скоростей,
когда сигналы,
отраженные
от движущихся
целей, подавляются
РГФ так же, как
и сигналы от
неподвижных
объектов, и
потому не могут
быть обнаружены.
Для
рассчитываемой
системы защиты
от пассивных
помех слепые
скорости кратны
V0=l/(2ЧTП)=0,03/(2Ч1670Ч10-6)=9
м/с.
+


_

Рис.
4.
Решение
проблемы «слепых»
скоростей
возможно при
использовании
вобуляции
(изменения)
периода повторения
ЗС. В простейшем
случае при
вобуляции
применяются
два фиксированных
значения периода
повторения,
для чего используется
фильтр с переключаемой
задержкой (рис.
5). АЧХ такого
фильтра равна
сумме АЧХ фильтров
ЧПК с разными
значениями
ТП.
+


_


_
 от
формирователя
ЗС
от
формирователя
ЗС
Рис.
5
Определим
соотношение
периодов повторения
ТП1/ТП2, при
котором не
происходит
подавления
сигналов от
ЛА, движущихся
со скоростями
до V=550 м/с. Для
этого найдем
величину
V/V0=600/9=67.
Тогда необходимое
соотношение
периодов повторения
ТП1/ТП2=(2ЧV/V0-1)
/ (2ЧV/V0)=133/134.
Если ТП1=1670 мкс,
то ТП2=ТП1Ч134/133=1682
мкс.
Оценим
степень подавления
пассивных помех
в фильтре ЧПК
с вобуляцией
периода повторения.
Принимая ширину
спектра помехи
равной Df=20
Гц и нормируя
максимальное
значение АЧХ
фильтра, получим
коэффициент
подавления
kП=20Чlg[[(2Чкsin(pЧDfЧTП1)ч
+ 2Чкsin(pЧDfЧTП2)ч
)] / 22]=
=20Чlg[[(2Чкsin(pЧ20Ч1670Ч10-3)ч
+ 2Чкsin(pЧ20Ч1682Ч10-3)ч]
/ 22] = -19,8 дБ.
Считается,
что подавление
помех является
эффективным
при kПі40 дБ.
Для удовлетворения
этого требования
используют
фильтры ЧПК
n-ого порядка
с АЧХ
К(f)=2nЧкsin(pЧfЧTП)чn.
При
использовании
вобуляции
периода повторения
и n=2
kП=20Чlg[[(2nЧкsin(pЧDfЧTП1)чn
+ 2nЧкsin(pЧDfЧTП2)чn
)] / 23]=
=20Чlg[[(22Чкsin(pЧ20Ч1670Ч10-3)ч2
+ 22Чкsin(pЧ20Ч1682Ч10-3)ч]2
/ 23] = -39,2 дБ, что
практически
соответствует
требованию
kП і
40 дБ.
3.2
Средства защиты
от активных
помех
3.2.1
Защита от
заградительных
и прицельных
помех
Когда
направления
на источники
сигнала и активной
помехи не совпадают,
можно скомпенсировать
помеху, применив
устройство
с основной и
дополнительной
антеннами.
Пусть основная
антенна А0 принимает
сигнал и помеху
у0, а дополнительная
компенсационная
антенна А1 –
только помеху
у1 с некоторым
сдвигом по фазе
от у0. Раскладывая
у1 на ортогональные
составляющие
и подбирая для
них соответствующие
весовые коэффициенты
W0 и W1,
можно скомпенсировать
помеху, принимаемую
антенной А0.
На
основании этих
соотношений
можно синтезировать
структуру
квадратурного
компенсатора
с корреляционными
обратными
связями, структурная
схема которого
приведена на
рис. 6.
В [2] показано,
что минимум
СКО помехи на
выходе компенсатора
обеспечивается
при
W0=
-rЧs0Чs1,
W1=
-r0Чs0Чs10,
где s0
и s1 – СКО
помех, принимаемых
антеннами А0
и А1 соответственно,
r - коэффициент
корреляции
помехи в первом
квадратурном
канале, верхний
индекс “0” обозначает
принадлежность
параметра ко
второму квадратурному
каналу. При
этом достигается
коэффициент
подавления
активной шумовой
помехи
КП=(1-фr·ф2)-1,
где
фr·ф2=r2+(r0)2.
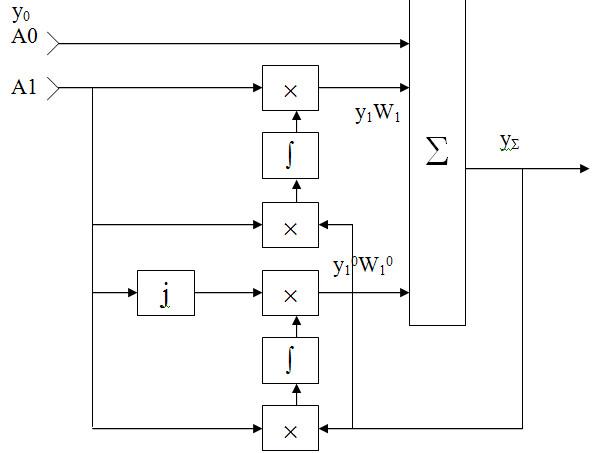
Рис.
6.
Оценим
зависимость
КП от пr·п.
| пr·п |
0 |
0,5 |
0,8 |
0,9 |
0,95 |
0,99 |
0,995 |
1 |
| КП |
1 |
1,33 |
2,78 |
5,26 |
10,25 |
50,25 |
100 |
Ґ |
Как следует
из таблицы,
эффективное
подавление
происходит
для помех с
коэффициентом
корреляции
пr·пі0,99,
то есть для
сильно коррелированных
помех.
3.2.2
Защита от уводящих
помех
Защита
РЛС от УП может
быть реализована
введением при
обработке
радиолокационной
информации
дальностного
порогового,
скоростного
порогового
и порогового
по ускорению
критериев,
рассмотренных
в пункте 2.2. Однако
для их корректной
работы необходимо
обеспечение
однозначного
измерения
скорости ЛА
доплеровским
способом. Поскольку
максимальная
однозначно
измеряемая
скорость
 4,5
м/с,
4,5
м/с,
то применение
пороговых
алгоритмов
не даст эффективного
результата.
Менее
эффективным
способом защиты
от УП является
введение в РЛС
режима сопровождения
слабого сигнала,
при котором
при воздействии
ответной помехи
(первый этап
в постановке
УП) продолжается
сопровождение
менее мощного
сигнала от
цели.
4.
Анализ эффективности
применения
комплекса помех
и средств
помехозащиты.
Эффективность
действия помех
будет оцениваться
для случая
расположения
цели с указанными
в задании параметрами
на дальности
R=50 км.
При
воздействии
только пассивных
помех с рассчитанными
в пункте 2.3. параметрами
отношение
сигнал/помеха
на входе РЛС
равно
qП
= Е / nУП’Ч0,17Чl2
= 2 / 1,3Ч106Ч0,17Ч0,032
= 0,01.
За счет
применения
фильтров ЧПК
qП увеличится
приблизительно
на 40 дБ (в 100 раз)
и составит
qПП’=1.
Вероятность
правильного
обнаружения
 =
= .
.
При
воздействии
только активных
шумовых помех
(например,
прицельных)
по боковым
лепесткам
отношение
сигнал/помеха
равно
 =
=
 .
.
Если
коэффициент
корреляции
помехи, принимаемой
антеннами
автокомпенсатора,
фr·ф=0,995,
то отношение
сигнал/помеха
увеличится
в 50 раз и составит
qАП’=0,5.
Вероятность
правильного
обнаружения
 =
=
 .
.
Применение
согласованных
по дальности
и скорости
уводящих помех
с высокой
вероятностью
будет приводить
к захвату ложной
цели.
При воздействии
комплекса помех
вероятность
пропуска