Разработка конструкции и технологии изготовления модуля управления временными параметрами
Министерство
образования
Республики
Беларусь
Учреждение
образования
«Белорусский
государственный
университет
информатики
и радиоэлектроники»
Факультет
компьютерного
проектирования
Кафедра
электронно
– вычислительных
средств
К защите
допустить
Заведующий
кафедрой
____ __/
А.А.Петровский
/
"_____"___________2002г.
ПОЯСНИТЕЛЬНАЯ
ЗАПИСКА
к дипломному
проекту
НА ТЕМУ:
“Разработка
конструкции
и технологии
изготовления
модуля управления
временными
параметрами”
Дипломник
/ В.А.Николаев
/
Руководитель
/ В.Б.Соколов /
Консультанты:
по
экономике
/ Т.Л. Слюсарь
/
по
охране труда
и экологической
безопасности
/ А.И. Навоша /
Нормоконтроль
/ В.Б.Соколов
Рецензент
/ /
Минск
2002 г.
ВВЕДЕНИЕ
Современная
микроэлектроника
привела к
революционным
преобразованиям
практически
во всех отраслях
техники, не
говоря уже о
радиоэлектронной
и электронно-вычислительной
аппаратуре.
Повышение
плотности
упаковки аппаратуры
на микросхемах,
их надежности
и долговечности,
автоматизация
производства
элементной
базы дали возможность
применять
достаточно
сложные микроэлектронные
устройства
в таких областях,
как автомобилестроение,
связь, управление
технологическими
процессами,
измерительная
техника, бытовая
техника и т. д.
В то
же время появление
и развитие
микроэлектроники
как научно-технического
направления
потребовало
коренного
изменения как
методов проектирования
аппаратуры,
так и направления
подготовки
современных
специалистов
по проектированию,
производству
и эксплуатации
микроэлектронной
аппаратуры
различного
назначения.
Дипломное
проектирование
является завершающим
этапом всей
программы
обучения. В
процессе дипломного
проектирования
решаются следующие
задачи:
- изучение
конструкторских
разработок,
базовых техпроцессов
и методов контроля
параметров
по теме дипломного
проекта;
- приобретение
практических
навыков постановки
анализа и решения
инженерных
задач, связанных
с разработкой
проекта;
- сбор
материала
справочного,
информационного
характера,
ознакомление
с современными
разработками
РЭА;
- выбор
и обоснование
методов реализации
технических
решений проекта;
- разработка
структурной
и принципиальной
схем блока;
- разработка
конструкции
блока;
- экономическое
обоснование
и охрана труда.
Используемые
в настоящее
время устройства
управления
временем в
основном построены
на дискретных
элементах или
представляют
собой механические
крупногабаритные
реле, и обеспечивают,
как правило,
относительно
большую погрешность
контроля процесса
для современного
производства.
В данном дипломном
проекте будет
разработан
модуль управления
временными
параметрами
,встраиваемый
в шкафы промышленной
автоматики,
благодаря
которому упрощается
процесс регулирования,
задания и обработки
информации,
при этом обеспечивается
обмен информацией
с центральным
компьютером
типа IBM PC
. Так же данное
исполнение
позволяет
увеличить
точность отсчета
времени.
В ходе
дипломного
проектирования
будет проведен
выбор и обоснование
элементной
базы, материалов
конструкции,
компоновочной
схемы, метода
и принципа
конструирования.
Правильность
и целесообразность
принятых решений
должны подтвердить
проведенные
конструкторские
расчеты, выполненные
с помощью ЭВМ.
Кроме этого
будет проведена
оценка технологичности
конструкции,
разработана
технологическая
схема сборки,
а так же маршрутная
и операционная
технология.
Анализ
технического
задания
1.1 Назначение
Разрабатываемое
устройство
предназначено
для управления
временными
параметрами
контролируемого
процесса .
1.2 Основание
для разработки
Основанием
для разработки
устройства
является задание
на дипломное
проектирование.
1.3 Источники
разработки
Устройство
должно быть
разработано
на базе уже
существующих
схемных решений
аналогичных
устройств.
1.4 Технические
требования
1.4.1 Состав
изделия и принцип
работы
Устройство
собрано на
микроконтроллере
МС68НС711Е9 фирмы
Motorola. Реализована
возможность
записи изменений
временных
значений в
энергонезависимую
память.
1.4.2 Устройство
должно иметь
следующие
технические
параметры:
Устройство
разрабатывается
на базе микроконтроллера
МС68НС711Е9.
Конструктивно
устройство
выполняется
в виде отдельного
блока.
Напряжение
питания ≈220 В.
Мощность,
потребляемая
прибором от
сети электропитания,
не должна превышать
10 Вт.
Габаритные
размеры не
более не более
200х150х100.
1.4.3 Требования
к надёжности
Средняя
наработка на
отказ должна
быть не менее
10000 часов в нормальных
условиях
эксплуатации.
Среднее
время восстановления
прибора обслуживающим
персоналом
должно быть
не более 2 часов.
После восстановления
работоспособности
устройство
должно сохранять
показатели
назначения,
указанные в
данном пункте.
Средний срок
службы не менее
10 лет с учётом
ремонтно-восстановительных
работ.
1.4.4
Конструкторско-технологические
требования
Конструкция
устройства
должна обеспечивать
свободный
доступ к составным
элементам
изделия при
проведении
пуско-наладочных
и ремонтных
работ.
Материалы
и комплектующие
изделия должны
применяться
по действующим
стандартам
и техническим
условиям на
них.
Показатели
технологичности
конструкции
изделия должны
соответствовать
ГОСТ 14.201-73.
Устройство
должно удовлетворять
требованиям
эргономики
по ГОСТ 12.2.032-78, ГОСТ
12.2.033-78 и общим требованиям
эстетики по
ГОСТ 24750-81.
1.4.5 Условия
эксплуатации
Разрабатываемое
устройство
должно быть
рассчитано
на эксплуатацию
в условиях по
ГОСТ 21552-84 (группа3)
при температуре
от -25 до +50 ˚С и
относительной
влажности 40 -
80% при 35 ˚С.
Устройство
должно быть
устойчиво к
воздействию
атмосферного
давления от
84 до 107 кПа (от 630 до
800 мм. рт. ст. ).
По
стойкости к
климатическим
и механическим
воздействиям
устройство
должно соответствовать
ГОСТ 21552-84.
1.4.6 Требования
к упаковке,
маркировке,
транспортированию
и хранению
Маркировка
разрабатываемого
устройства
должна соответствовать
ГОСТ 21552-84. она должна
содержать:
полное
торговое наименование
по ГОСТ 26794-85;
торговый
знак и (или)
наименование
предприятия
изготовителя;
месяц
и год выпуска;
отметку
ОТК предприятия
изготовителя;
порядковый
номер изделия
по системе
нумерации
предприятия
изготовителя;
предупредительные
знаки по ГОСТ
12.2.006;
обозначение
стандарта на
модуль;
дополнительные
требования
(определяет
предприятие
изготовитель);
место
и способ нанесения
маркировки
устанавливается
в ТУ на модуль.
Транспортирование
приборов
осуществляется
всеми видами
закрытого
транспорта
с соблюдением
правил и норм,
действующих
на каждом виде
транспорта.
Приборы
следует хранить
на стеллажах
в транспортной
таре предприятия
изготовителя.
Расстояние
между стенами,
полом хранилища
и приборами
должно быть
не менее 100 мм.
расстояние
между отопительными
устройствами
хранилищ и
приборами
должно быть
не менее 0.5 м.
1.5 Экономические
показатели
Тип
производства
– серийное.
1.6 Порядок
испытаний
По ГОСТ
11478-88 аппаратуру
в зависимости
от условий
эксплуатации
подразделяют
на 4 группы.
Разрабатываемое
устройство
относится к
группе 1 (условия
эксплуатации
- в производственных
помещениях).
На
аппаратуру
этой группы
действуют
следующие
дестабилизирующие
факторы :
синусоидальные
вибрации;
различные
механические
воздействия
при транспортировке;
пониженная
и повышенная
температура
среды;
повышенная
влажность
воздуха;
воздействие
пыли.
Для того,
чтобы выяснить,
как поведет
себя аппаратура
при воздействии
этих факторов,
а также для
проверки соответствия
ее установленным
в техническом
задании требованиям,
проводят испытания
аппаратуры
на воздействие
внешних механических
и климатических
факторов.
Опытный
образец изделия
должен быть
подвергнут
предварительным
и приёмо-сдаточным
испытаниям.
Они должны
проводиться
на соответствие
требованиям
ТЗ по согласованным
и утверждённым
программе и
методике.
2 ОБЗОР
АНАЛОГИЧНЫХ
РАЗРАБОТОК
ПО ТЕМЕ ДИПЛОМНОГО
ПРОЕКТА
Целью
патентных
исследований
является получение
исходных данных
для обеспечения
высокого технического
уровня и
конкурентоспособности
объектов техники,
для использования
современных
объектов НТП
и исключения
неоправданного
дублирования
исследований
и разработок.
Проведем
краткое описание
изобретений.
Цифровой
контроллер
DC ЗООО.
Универсальный
цифровой контроллер
DC ЗООО
- микропроцессорный
автоматический
контроллер
в соответствии
со стандартом
ј
DІМ.
Контроллер
обеспечивает
высокую степень
функциональных
возможностей
в сочетании
с простотой
зксплуатации.
Стандартная
точность контроллера
- +/-0,2О% от диапазона.
DС 3000
представляет
собой идеальный
контроллер
для регулирования
температуры
и других переменных
процесса в
нагревательных
и холодильных
установках
различного
назначения,
металлообработке,
пищевой и
фармацевтической
промышленности,
в испытательных
установках
и средствах
заш,иты окружаюш,ей
среды.
Специальные
вакуумные
флуоресцентные
дисплеи с подсказками
и сообщениями
на английском
языке обеспечивают
удобство работы
с контроллером.
Запрограммированные
последовательности
вывода информации
на дисплей
обеспечивают
быстрый и точный
ввод настраиваемых
параметров.
Используя
несложные
комбинации
клавиш, можно
устанавливать
конфигурацию
входных величин
и диапазона,
задавать рабочие
параметры в
соответствии
с требованиями
управляемого
процесса и при
необходимости
вносить в них
изменения.
Тактильная
клавиатура
обеспечивает
обратную связь
с оператором.
Контроллер
устойчив к
внешним воздействиям.
Его можно установить
практически
в любом месте:
на стене, на
панели и даже
на корпусе
машины. Контроллер
может работать
при окружаюцей
температуре
до 55°С, устойчив
к вибрациям,
толчкам и ударам.
Средства
самодиагностики,
отказоустойчивая
конструкция
и надежная
клавиатура
обеспечивают
надежную безотказную
работу.
ВОЗМОЖНОСТИ
И ДОСТОИНСТВА
Специализированные
дисплеи - вакуумные
флуоресцентные
дисплеи с сообщениями
на английском
языке обеспечивают
оператора
информацией
о текущем состоянии
процесса. Индикатор
отклонения
(в виде полосы)
указывает
отклонение
(до +/-10% диапазона)
между заданной
величиной и
переменной
процесса.
Универсальные
изолированные
входы допускают
подключение
термопары,
резистивного
термометра,
милиамперных,
миливольтовых
и вольтовых
входных сигналов.
Все входы
настраиваемые,
не требуют
калибровки.
Контроллер
позволяет
выполнять
следующие
функции:
- возможность
настройки
действий в
случае отказа
термопары ;
простая
настройка (
запросы на
английском
языке обеспечивают
настройку
конфигурации
кснтроплера
в логической
последовательности);
ручные
н автоматические
режимы
– удобный , без
каких-либо
промежуточных
действий переход
из одного режима
в другой;
алгоритмы
управления
- контроллер
может быть
настроен на
двухрежимное
управление
(включено-выключено)
,с ручным сбросом
, трехпозиционного
пошагового
управления.
нагрев/охлаждение
- имеется возможность
разделения
диапазонов
управления
с независимыми
константами
настройки для
ПИД-управления:
для нагрева,
для охлаждения
и смешанные.
управляющие
выходы - пропорциональный
времени , пропорциональный
току или пропорциональный
позиции, двухрежимный
(включен-выключен),
пропо рциональный
времени дуплекс
или пропорциональный
току дуплекс
, ток/релейный
дуплекс ;
две
локальные
заданные величины
- могут выбираться
через клавиатуру
или дополнительный
дистанционный
переключатель.
выбор
сигнала тревоги
- один или два
настраиваемых
сигнала тревоги.,
предупреждающих
о критическом
состоянии
процесса.
линейное
изменение
заданной величины
- один программируемый
участок линейного
изменения
заданной величины
длительностью
до 255 минут.
программирование
изменения
заданной величины
- программирование
и сохранение
нескольких
(до шести) сегментов
линейного
изменения и
сохранения
заданной величины,
ис:пользуемых
в одной программе
(или в нескольких
небольших
программах).
дополнительные
возможности
- автонастройка
с автотоматическим
расчетом оптимальных
констант настройки,
дополнительный
выход 4--20 мА,
масштабируемый
в соответствии
с любым представляемым
параметром;
канал связи
для подключения
к управляющему
компьютеру;
программирование
изменения
заданной величины,
позволяюш,ее
указать до
шести сегментов
линейного
изменения и
до шести сегментов
сохранения
постоянного
значения заданной
величины; цифровой
вход для дистанционного
выбора заданных
величин, режимов
управления,
действий
контроллера,выполнения
/ фиксации линейного
изменення
заданной величины
, программы
изменения
заданной величины.
ОСНОВНЫЕ
ТЕХНИЧЕСКИЕ
ХАРАКТЕРИСТИКИ
Точность
обычно в пределам
+/-0.20% диапазона
( для цифрового
отображения
+/ - 1 цифра).
Для
достижения
номинальной
точности может
потребоваться
калибровка
на месте. Это
требуется для
температур
ниже –2ОО°F.
Параметры
настройки
:
коэффициент
передачи (%)- 0,1;
cкорость
0 ,0 8 - - 10 ,0 0 м и н у т. Сброс
0,02 - 50,00 минут/повтор
или повторов/минуту;
э.ле
к т ро п и т а н
и е: 120/240 В,
50 или 60 Гц;
ИНТЕРФЕЙС
ОПЕРАТОРА
Верхний
дисплей (6 разрядов):
-
при нормальной
работе отображается
переменная
процесса (4 цифры);
в
режиме
конфигурирования
отображается
величина или
выбранное
значение параметра.
Нижний
дисплей (8 разрядов):
-при
нормальной
работе отображаются
рабочие
параметры вел
и ч и н ы ;
-
в режиме
конфигурирования
отображаются
названия параметров.
Цифровой
контроллер
DC 2000 Міnі-Рго
Универсальный
цифровой
контроллер
DC 2000 Міnі-Рго
- это недорогой
прибор
семейства
моделей фирмы
НonеуwеІІ.
Он осуществляет
текущий контроль
за управлением
температурой
и другими переменными
параметрами
в такой аппаратуре,
как климатические
камеры, машины
обработки
пластмассы,
печи и термостаты,
оборудование
для упаковки.
Универсальный
цифровой контроллер
DС 2000
Міnі-Рго
можно использовать
для контроля
переменных
параметров,
таких как
температура,
давленне, поток,
уровень н поворот.
Универсальный
цифровой контроллер
DС 2000 Міnі-Рго
имеет определенной
конфигурации
дисплей, который
обеспечивает
простые подсказки
для упрощения
работы с прибором.
Программируемые
последовательности
команд дисплеев
обеспечивают
быстрый и точный
ввод всех
конфигурационных
параметров.
Простая клавиатура
позволяет
изменять рабочие
параметры для
полного удовлетворения
требований
контроля процесса.
Техническне
данные/преимущества
Легкость
конфигурирования
- яркий специальный
дисплей обеспечивает
непосредственно
подсказки на
английском
языке, что позволяет
задавать необходимые
установки с
минимальными
затратами
времени и усилий.
Универсальные
входы - допускают
использованне
10 тонов термопар
посредством
простого
конфигурирования.
Надежность
термопар -
конфигурируемый
с масштабированием
вверх и
вниз не нагреваемый
и надежный
выходной уровень.
Высокая
помехоустойчивость
- универсалыный
цифровой контроллер
DС 2000
Міnі-Рго
разработан
для обеспечення
надежных
характеристик
в окружающей
среде промышленного
производства,
которая часто
воздействует
на высокочувствительные
к помехам электронное
оборудование.
Двойное
управление
параметрами-
простой клавишный
выбор позволяет
быстро переключаться
от основной
к альтернативной
программе с
минимальными
неудобствами
для оператора.
Диагностические/сигнальные
выходы - постоянные
диагностические
программы
обнаруживают
возникающие
неисправности,
переключают
выходное значение
обнаружения
отказа и идентифицируют
неисправность,
чтобы до минимума
сократить время
устранения
неисправности.
Высокая
надежность
- долговременная
память гарантирует
сохранность
информации
при потере
электропитания.
Надежность
клавиатуры
не допускает
случайные или
не санкционированные
изменения в
процессах.
Конфигурация
дисплея по
умолчанню -
может быть
конфигурация
для показа
переменных
процесса или
контрольной
точкм, вместо
пустого дисплея
в процессе
нормальной
работы.
Алгоритмы
контроля - контроллер
может быть
конфигурирован
для режимов:
двухрежимное
управление
,с ручным сбросом
или трехпозиционного
пошагового
контроля.
Дополнительные
особенности
Дистанционная
контрольная
точка - 4 - 20 мА или
1 - 5 В входы, используемые
для дистанционных
сигналов.
Выход
РV - этот
выходной сигнал
переменной
процесса можно
масштабировать
от 0 до 5 В или от
1 до 5 В в диапазоне
от 0 до 100% для любого
требуемого
диапазона.
Контактный
вход - позволяет
станционарный
выбор: локальной
контрольной
точки от дистанционной,
локальной
контрольной
точки 2 от локальной
контрольной
точки 1.
Выбор
предупредительных
сигналов -
отсутствие,
одно или два
реле для запуска
внешних устройств,
когда достигаются
предварительно
установленные
верхние/нижние
точки.
Имеется
индикатор для
каждого тревожного
сигнала в интерфейсе
оператора. Для
дуплексной
работы применяется
только один
предупредительный
сигнал. Фиксированный
гистерезис
аварийного
сигнала 0,5% входного
диапазона.
Автонастройка
- при разрешенном
состоянии
позволяет
автоматически
вычислять и
вводит в память
оптимальные
параметры
настройки,
требуемые для
процесса. Эта
особенность
быстрой настройки
позволяет
получить
приблизительные
константы
настройки.
Линейное
изменение/
программа -
позволяет
запускать
одиночное
линейное изменение
или программу
и записывать
в память 6 линейных
измененнй и
6 сегментов для
программирования
контрольной
точки. Прогон
или удержание
программы
выбирается
клавиатурой
или дистанционным
переключателем.
Универсальный
цифровой контроллер
DС 2000 Міnі-Рго
применяется
с ниже перечисленными
типами выходов.
Пропорциональный
временной -
обеспечивает
режим включено/выключено
(Оn-Off)
или пропорционально
временной
(релейный) выход.
Релейный выход
является стандартным,
дополнительным
выходом является
выход для
полупроводниковых
реле.
Пропорциональный
токовый - обеспечивает
токовый выход
для конечных
регулирующих
элементов,
которые требуют
сигнала 4-20 мА.
Пропорциональный
временной
дуплексный
- (Нагрев/Охлажденне)
в зависимости
от выбранного
алгоритма
управлення
этот дуплексный
выход может
обеспечивать
включение-выключение
или дуплексное
пропорционально
временное
регулирование.
Пропорционально
временной
дуплексный
выход обеспечивает
независимые
константы и
два пропорционально-временных
выхода: один
для зоны нагрева
выше 50% выходного
сигнала и другой
для зоны охлаждения
ниже 50% выходного
сигнала.
Контроллер
процессов DC512
Контроллер
процессов DС512
является прибором
на основе
микропроцессоров
стандарта DIМ
, способным
осуществлягь
слежение и
управление
большим количеством
разнообразных
процессов и
переменных
параметров
процессов. Его
широкий и гибкий
набор входов
и выходов вместе
с мощными
возможностями
программного
обеспечения
делают его
подходящим
выбором для
осуществления
жесткого контроля
буквально во
всех областях
промышленности
, от переработки
пищевых продуктов
до химической
технологии
и термообработки,
поскольку он
достаточно
экономически
эффективен,
чтобы удовлетворять
требованиям
поставщиков
технологического
оборудования.
Уникальные
модульные
сменные карты
контроллера
DC512 позволяют
пользователю
легко выполнять
изменения
входа, выхода
и функций реле
системы безопасности
в производственных
условиях.
Опции
входов поступления
информации
об управляемом
процессе включают
термопару,
резнстивный
детектор температуры
(с разрешением
1° или0,1°) и
напряжение/ток.
Входы
напряжения
или тока можно
линеаризовать
с помощью заданной
10-точечной кривой
линеаризации
или функции
наименьших
квадратов.
Смещение входного
значения сигнала
позволяет
пользователю
легко компенсировать
деградацию
сенсоров или
разбаланс
передатчика.
Все входы полностью
изолированы
от управляющих
выходов. Имеется
возможность
достиження
большего уровня
изоляции с
помощью оптической
изоляции входного
сигнала переменной
величины процесса
от остальных
входов, выходов
и систем передачи
данных, чтобы
еще более снизить
риск возникновения
паразитного
контура с замыканием
на землю.
Опции
выходов сигналов
управления
включают механнческое
реле, твердотельное
реле, привод
твердотельного
реле . Эти типы
выходов могут
быть использованы
в практически
любых комбинациях
дпя управлення
процессами
нагрева/охлаждения.
Карта
опции выхода
сигнала тревоги
содержит два
механических
реле. Сигналам
тревоги можно
придать независимую
друг от друга
конфигурацию
в виде переменной
процесса, диапазонами
отклонения.
Зона нечувствительности,
действие сигнала
тревоги и фиксация
являются полностью
настраиваемыми
на определенную
конфигурацию.
Стандартные
входы и выходы
включают удаленную
точку задания
с настраиваемой
конфигурацией
и смещением;
передачу информации
о любом переменном
параметре
процесса или
заданной точке;
контактньй
вход для внешнего
выбора режима
ручного управлення,
удаленной гочки
задания, второй
заданной точки;
специальное
реле "откатов",
которое срабатывает,
если потерян
входной сигнал
или отказал
микропроцессор;
источник питания
24 В постоянного
тока для энергообеспечения
передающей
системы. Все
входы всегда
находятся в
рабочем состоянии,
без замены
одного на другой.
Дополнительные
свойства DC
512 контроллера
включают четыре
уровня блокировки
клавиатуры
безударный
переход от
выхода автоматического
к выходу ручного
управления
и самонастройка,
которая позволяет
пользователю
регулировать
процесс нажатием
клавиши. Настраиваемые
параметры также
можно весьма
легко выбрагь
вручную.
Физическая
конструкция
включает алюминиевый
корпус с мембраной
, передней панелью,
которая отвечает
требованиям
3 Национальной
ассоциации
производителей
электрооборудования
(СІІІА). Все клавиши
выпуклой формы
контактного
типа.
Имеется
последовательная
линия передачи
сообщений со
скоростью
передачи сообщений
до 19200 бод, проверка
данных избыточным
циклическим
кодом и функция
"крыши", которая
управляет
контроллером
в случае потери
возможности
передачи
сообщений.Чрезвычайно
эффективный
протокол совместим
со всеми приборами
фирмы Роwers
.Имеется
специальный
пакет программного
обеспечення
ControlLink для
наблюдательного
контроля на
базе персонального
компьютера,
а также популярное
программное
обеспеченне
Genesis Control
Series.
3 РАЗРАБОТКА
КОНСТРУКЦИИ
УСТРОЙСТВА
В данном
разделе необходимо
произвести
предварительное
разбиение
разрабатываемого
устройства
на составные
части, произвести
комплекс мер
по совершенствованию
конструкции
и приведению
её к общепринятым
используемым
стандартам,
а также проверяеть
и уточнить
соответствие
основных
характеристик
разработанного
устройства
к предъявляемым
в технических
требованиях.
Выбираются
способы защиты
от воздействия
внешних факторов,
таких, например,
как вибрация,
пыль, влага и
повышенная
температура.
В процессе
расчетов выбирается
компоновочная
схема устройства,
метод и принцип
его конструирования,
производится
ориентировочный
выбор способа
охлаждения
и расчет теплового
режима по выбранному
способу охлаждения,
расчет на
виброзащищенность
конструкции
путем расчета
собственной
частоты колебаний
печатной платы.
Надежность
является одним
из главных
технических
параметров,
характеризующих
ЭВА. Расчетные
значения показателей
надежности
служат отправным
моментом при
окончательном
выборе схемных
и конструктивных
решений. Методика
расчетов надежности,
теплового
режима и виброзащищенности
приведена
далее.
Проектируемое
устройство
представляет
собой модуль
промышленной
автоматики.
Исходя из
климатических
условий модуль
предназначен
для эксплуатации
в закрытом
пространстве
с исскуственным
климатом. Чтобы
избежать
проникновения
пыли и влаги
конструкция
должна быть
герметична.
Исходя из ГОСТ
14254-80 определим
степень защиты
проектируемого
блока:
Степень
защиты от
проникновения
внутрь оболочки
внешних предметов-
группа 6 (пыленепронецаемость).
Степень
защиты от
проникновения
влаги – группа
6 (защита от водяных
паров).
Получаем
степень защиты
блока –IP66
Конструирование
может быть
реализовано
различными
методами [13]:
геометрическим,
машиностроительным,
топологическим,
проектирования
моноконструкций,
базовым, эвристическим
и автоматизированного
проектирования.
Дадим краткую
характеристику
некоторым из
них.
Геометрический
метод. В основу
метода положена
структура
геометрических
и кинематических
связей между
деталями,
представляющая
собой систему
опорных точек,
число и размещение
которых зависит
от заданных
степеней свободы
и геометрических
свойств тела.
Этот
метод является
основным средством
решения задачи
во всех случаях,
когда от конструкции
требуется
высокая точность
взаимного
перемещения
деталей или
длительное
и точное сохранение
определенных
параметров,
зависящих от
расположения
деталей.
Машиностроительный
метод. В основу
этого метода
положена структура
геометрических
и кинематических
связей между
деталями,
представляющая
собой систему
опорных поверхностей,
число и размещение
которых выбирается
из минимизации
массы и допустимой
прочности
конструкции.
Метод
нашел применение
при проектировании
несущих конструкций
ЭВА всех уровней,
кинематических
звеньев функциональных
узлов, а также
всех видов
неподвижных
соединений.
Топологический
метод. В основу
его положена
структура
физических
связей между
ЭРЭ, т. е. Представление
конструктивного
вида электрической
схемы и ее
геометрической
(топологической)
связности,
независимо
от ее функционального
содержания.
Топологический
метод конструирования
применяется,
в первую очередь,
для создания
пленочных
интегральных
схем, печатных
плат, гибких
печатных
соединителей,
электромонтажных
чертежей.
Базовый
метод конструирования.
В основу метода
положено деление
аппаратуры
на конструктивно
и схемно законченные
части. Базовый
метод конструирования
и его разновидности
(функционально-модульный,
функционально-узловой
и функционально-
блочный методы)
основываются
на принципах
агрегатирования,
функциональной
и размерной
взаимозаменяемости,
схемной и
конструктивной
унификации.
Деление базового
метода на
разновидности
связано с
ограничениями
схемной и
конструкторской
унификации
структурных
уровней (модулей,
функциональных
узлов, блоков).
Базовый
метод является
основным при
проектировании
любой современной
радиоаппаратуры
всевозможного
назначения,
он имеет много
преимуществ
по сравнению
с другими:
на
этапе разработки
позволяет
одновременно
вести работу
над многими
узлами и блоками,
что сокращает
сроки проведения
разработок;
упрощает отладку
и сопряжение
узлов в лаборатории,
так как работа
любого функционального
узла определяется
работой известных
модулей и микросхем;
резко упрощает
конструирование
и макетирование,
сокращает
объем оригинальной
конструкторской
документации,
дает возможность
непрерывно
совершенствовать
аппаратуру
без коренных
изменений
конструкции;
упрощает и
ускоряет внесение
изменений в
схему, конструкцию
и конструкторскую
документацию;
на
этапе производства
сокращает
сроки освоения
серийного
производства
аппаратуры;
упрощает сборку,
монтаж, снижает
требования
к квалификации
сборщиков и
монтажников;
снижает стоимость
аппаратуры
благодаря
широкой автоматизации
и механизации
производства;
повышает степень
специализации
производства;
при
эксплуатации
повышает
эксплуатационную
надежность
ЭВА, облегчает
обслуживание,
улучшает
ремонтопригодность
аппаратуры.
Чтобы
правильно
скомпоновать
устройство,
необходимо
проанализировать
его электрическую
схему с точки
зрения электромагнитной
совместимости,
тепловой режим,
учесть требования
ремонтопригодности
и удобство
эксплуатации.
Существует
большое разнообразие
видов электрического
монтажа. Наибольшее
же распространение
получили проводной
и печатный
монтаж. Соединения
с помощью монтажных
проводов применяются
в конструкциях
ЭВА для электрического
соединения
сравнительно
крупных узлов.
Электрические
же соединения
в самих узлах
обычно проводятся
с помощью печатных
проводников,
выполненных
на печатных
платах.
Применение
печатных плат
создает предпосылки
для механизации
и автоматизации
процессов
сборки радиоэлектронной
аппаратуры,
повышает ее
надежность,
обеспечивает
ее повторяемость
параметров
монтажа (емкость,
индуктивность)
от образца к
образцу.
С целью
повышения
процента выхода
годных плат,
применения
на предприятиях
унифицированного
технологического
оборудования
и снижения
трудоемкости
применяют
единую базовую
технологию,
которой является:
а) химический
метод – для
односторонних
печатных плат;
б)
комбинированный
позитивный
(негативный)
метод – для
двусторонних
печатных плат;
в)
полуаддитивный
(электрохимический)
метод – для
двусторонних
печатных плат
с повышенной
плотностью
монтажа (3–5 класс
точности).
Основная
задача, решаемая
при компоновке
ЭВА - это правильный
выбор форм,
основных
геометрических
размеров,
ориентировочное
определение
веса и расположения
в пространстве
любых элементов
или изделий
радиоэлектронной
аппаратуры
[13]. На практике
задача компоновки
ЭВА чаще всего
решается при
использовании
готовых элементов
с заданными
формами, размерами
и весом, которые
должны быть
расположены
в пространстве
или на плоскости
с учетом электрических,
магнитных,
механических,
тепловых и
других видов
связей. Имея
прин-ципиальную
схему и компоновочный
эскиз функционального
узла, можно
еще до разработки
рабочих чертежей
и изготовления
лабораторного
макета оценить
возможный
характер и
величину паразитных
связей, рассчитать
тепловые режимы
узла и его
элементов,
выполнить
расчет надежности
с учетом не
только режимов
работы схемы
(электрические
коэффициенты
перегрузки),
но и с учетом
рабочих температур
элементов.
Методы
компоновки
элементов ЭВА
можно разбить
на две группы:
аналитические
и модельные.
К первым относятся
численные
(аналитические)
и номографические,
основой которых
является
представление
геометрических
параметров
и операций с
ними в виде
чисел. Ко вторым
относятся
аппликационные,
модельные,
графические
и натурные
методы, основой
которых является
та или иная
физическая
модель элемента,
например в
виде геометрически
подобного тела
или обобщенной
геометрической
модели.
Основой
для всех является
рассмотрение
общих аналитических
зависимостей.
При аналитической
компоновке
мы оперируем
с численными
значениями
различных
компоновочных
характеристик:
геометрическими
размерами
элементов, их
объемами, весом,
энергопотреблением
и т.п. Зная
соответствующие
компоновочные
характеристики
элементов
изделия и законы
их суммирования,
можно оценить
компоновочные
характеристики
всего изделия
и его частей.
4 СХЕМОТЕХНИЧЕСКОЕ
ПРОЕКТИРОВАНИЕ
4.1 РАЗРАБОТКА
СТРУКТУРНОЙ
СХЕМЫ УСТРОЙСТВА
Модуль
реализован
на базе цифрового
микроконтроллера
МС68НС711Е9 фирмы
Motorola.Данный
модуль выполняет
следующие
функции:
-ввод
с клавиатуры
требуемого
значения времени
,вывод текущего
значения времени
на жидкокристаллический
дисплей;
-регистрация
текущего значения
времени и
контролируемого
параметра в
энергонезависимой
памяти;
-выдачу
сообщения об
отклонении
сигнала от
заданного на
ЖКИ и центральный
компьютер;
-обмен
информацией
с центральным
компьютером
типа IBM PC
;
-регулирование
контролируемого
параметра во
времени по
заданному
закону.
Проанализировав
выполняемые
функции выделим
следующие
структурные
элементы:
силовая
часть;
электрическая
развязка;
управление
уровнем выходного
сигнала;
наборное
поле;
сброс
микроконтроллера
при включении
и снижении
питания ниже
уровня 0,5 В ;
датчик
входного сигнала;
аналогово-цифровой
преобразователь
входного сигнала;
микроконтроллер;
ЦАП
выходного
сигнала для
ЖКИ;
индикация;
преобразование
уровней сигнала
для связи с
центральным
компьютером.
Взаимосвязи
между этими
структурными
элементами
приведены в
приложении
.
4.2 ВЫБОР
И ОБОСНОВАНИЕ
ПРИМЕНЯЕМОЙ
ЭЛЕМЕНТНОЙ
БАЗЫ
Выбор
элементной
базы необходимо
производить
исходя из условий
эксплуатации
устройства.
Таким образом,
ко всем электрорадиоэлементам
схемы, ко всем
конструкционным
материалам
и изделиям
предъявляются
те же требования,
что и ко всему
устройству
в целом.
Выбор
ЭРЭ производится
на основе требований
к аппаратуре,
в частности,
кинематических,
механических
и других воздействий
при анализе
работы каждого
ЭРЭ и каждого
материала
внутри блока,
и условий работы
каждого блока
конструкции.
Выбор
резисторов
будем производить
учитывая:
эксплуатационные
факторы (интервал
рабочих температур,
относительную
влажность
окружающей
среды, атмосферное
давление и
др.);
значение
электрических
параметров
и их допустимое
отклонение
в процессе
эксплуатации
(номинальное
сопротивление,
допуск, и др.)
показатели
надежности
и долговечности;
конструкцию
резисторов,
способ монтажа,
массу.
В целях
повышения
надежности
и долговечности
резисторов
(и других ЭРЭ),
во всех возможных
случаях следует
использовать
их при менее
жестких нагрузках
и в облегченных
режимах по
сравнению с
допустимыми.
Исходя
из схемы электрической
принципиальной,
определяем,
что постоянные
резисторы
должны обеспечивать
номинальную
мощность 0,0125 Вт.
При этом используются
резисторы
сопротивлением
10 Ом.
Учитывая
все эти характеристики
(требования
по габаритам
и массе, требования
в области
кинематических
и механических
воздействий),
можно сделать
вывод, что
перечисленным
требованиям
удовлетворяют
постоянные
непроволочные
резисторы
общего назначения
типа МЛТ.
Резисторы
этого типа
имеют характеристики,
приведенные
в таблице 4.2.1.
Таблица
4.2.1 - Эксплуатационные
характеристики
резисторов
типа МЛТ
| Характеристика |
Значение |
| Диапазон
номинальных
сопротивлений
при мощности
0,125 Вт |
10
...100000 |
| Уровень
собственных
шумов , мкВ/В |
1,5 |
| Температура
окружающей
среды , оС |
от
-60 до +70 |
| Относительная
влажность
воздуха при
температуре
+35 оС, % |
до
98 |
| Пониженное
атмосферное
давление, Па |
до
133 |
| Предельное
рабочее напряжение
постоянного
и переменного
тока. В |
200 |
| Минимальная
наработка, ч |
25000 |
| Срок
сохраняемости,
лет |
25 |
Эксплуатационная
надежность
конденсаторов,
так же как и
резисторов,
во многом
определяется
правильным
выбором их типа
и возможного
использования
их в режимах,
не превышающих
допустимые.
Для
правильного
выбора типа
конденсаторов
необходимо,
с учетом требований
к устройству,
принимать во
внимание следующие
факторы:
значение
номинальных
параметров
и их допустимые
изменения в
процессе
эксплуатации
(номинальная
емкость, допуск
и др.);
эксплуатационные
факторы;
показатели
надежности
и долговечности;
конструкцию
конденсаторов,
способы их
монтажа, габариты
и массу.
С учетом
всех выше изложенных
требований
произведем
выбор конденсаторов
постоянной
емкости.
В качестве
таких конденсаторов
выбираем конденсаторы
типа КМ-6А.
Эксплуатационные
характеристики
конденсаторов
этого типа
приведены в
таблице 4.2.2.
Таблица
4.2.2 -Эксплуатационные
характеристики
конденсаторов
КМ-6а
| Характеристика |
Значение |
| 1 |
2 |
| Температура
окружающей
среды, оС |
От
-60 до +85 |
| Относительная
влажность
воздуха , % |
До
98 |
| Атмосферное
давление, мм.тр.ст |
10-6
до 3атм. |
| Вибрационные
нагрузки с
ускорением
в диапазоне
5 - 200 Гц |
10g |
| Многократные
удары с ускорением |
до
35g |
| Линейные
нагрузки с
ускорением
, не более |
100g |
| Тангенс
угла потерь,
не более |
0,0012 |
| Минимальная
наработка, ч |
15000 |
| Срок
сохранения,
лет |
12 |
Схема
электрическая
принципиальная
содержит также
и полярные
конденсаторы.
С учетом всех
требований
предъявляемых
к ним выберем
электролитические
конденсаторы
типа К50-29 .
Эксплуатационные
характеристики
конденсаторов
этого типа
приведены в
таблице 4.2.3.
Таблица
4.2.3 - Эксплуатационные
характеристики
конденсаторов
типа К50-29
| Характеристика |
Значение |
| Температура
окружающей
среды, оС |
от
-20 до +70 |
| Относительная
влажность
воздуха, % |
до
98 |
| Атмосферное
давление, кПа |
от
1,3 до 2942 |
| Вибрационные
нагрузки с
ускорением
в диапазоне
1 - 600 Гц |
до
10 g |
| Многократные
удары с ускорением |
до
15 g |
| Линейные
нагрузки с
ускорением |
до
100 g |
| Допустимые
отклонения
емкости, % |
от
-20 до +80 |
| Минимальная
наработка, ч |
5000 |
| Срок
сохранения,
лет |
5 |
В данном
устройстве
используются
и интегральные
микросхемы.
При выборе
типов микросхем
будем учитывать
совместимость
их с динамическими
параметрами
MC69HC11E9
и в соответствии
с функциональным
назначением
микросхем. С
учетом этого
можно выбрать
следующие
интегральные
микросхемы:
КР140УД12,МС145000,МС145407,МС34064,МС7805.
Приведем
краткую характеристику
Микроконроллера
МС68НС711Е9.
Данное
семейство
микроконтроллеров
является одним
из наиболее
распространенных
в мире.Условные
обозначения,
которыми маркируются
микроконтроллеры
семейства,
имеют вид:
Микроконтроллер
содержит внутреннюю
память программ
(ППЗУ) емкостью
12 Кбайт, ОЗУ
емкостью 512 байт.
Модель имеют
внутреннее
ЭСППЗУ емкостью
512 байт.Микроконтроллер
работает при
напряжении
питания Vn
= 5 В, имеет максимальную
тактовую частоту
до Ft
= 4 МГц. Потребляемая
мощность составляет
150...300 мВт в диапазоне
тактовых частот
Ft
= 2...4 МГц. В режиме
ожидания мощность
снижается в
2 раза, а в режиме
останова не
превышает 250
мкВт.
Рассмотрим
особенности
функционирования
периферийных
модулей, используемых
в микроконтроллерах
этого семейства.
Модель
содержит 16-разрядный
таймер, который
имеет три входа
фиксации 1C, четыре
выхода совпадения
ОС. Эти таймеры
служат также
для генерации
периодических
прерываний
и контроля
выполнения
программы с
помощью сторожевого
устройства
(watchdog).
Кроме таймера
микроконтроллер
имеет также
8-разрядные
счетчики импульсов.
Микроконтроллер
содержит асинхронный
и синхронный
последовательные
порты SCI,
SPI,
8-разрядный
АЦП, ,число
аналоговых
входов 8.
Внешний
вид корпуса
показан на
рисунке 4.1
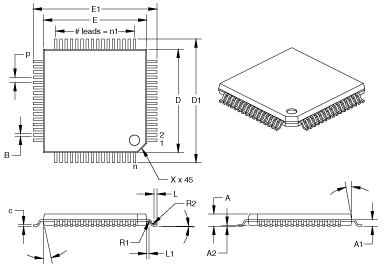
Рис.4.1
Корпус микроконтроллера
МС68НС711Е9
Номинальные
значения в мм
A
1.10
A1
0.64
A2
0.10
E1
12.00
E
10.00
D1
12.00
D
10.00
n1
16.00
n
64
c
0.15
B
0.22
L
0.30
R1
0.08
R2
0.14
alpha
10
beta
12
phi
3
L1
0.20
p
0.50
X
0.89
Микросхема
МС145407 размещается
в корпусе 751D-04.Вид
корпуса показан
на рисунке 4.2
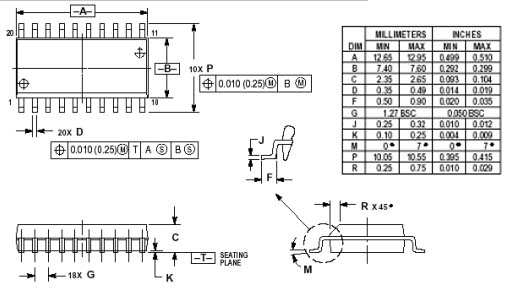
Рис.4.2
Микросхема
МС145407
4.3 РАЗРАБОТКА
ПРИНЦИПИАЛЬНОЙ
СХЕМЫ
Модуль
реализован
на базе цифрового
микроконтроллера
МС68НС711Е9 фирмы
Motorola, выполнен
в виде платы
и размещается
в корпусе. Модуль
был разработан
для задания
и контроля
продолжительности
цикла технологического
процесса .
Ядром
модуля является
процессор
микроконтроллер
МС68НС711Е9 . Микроконтроллер
МС68НС711Е9 представляет
собой микросхему
МС68НС711Е9 (DD6).
Схемотехническое
изображение
микросхемы
представлено
на рис.4.3.
входы
РВ0/А8…РВ7/А15-oбращение
к параллельному
порту PORTB;
входы
РС0/АD0…РC7/АD7-oбращение
к параллельному
порту PORTC;
входы
РE0…РE7-
oбращение
к параллельному
порту PORTE;
входы
РA0/IC3…РA7/OC1
используются
для обращения
к регистрам
таймера;
вход
XIRQ –запрещает
обслуживание
внешнего прерывания;
Reset-сигнал
начальной
установки
микроконтроллера;
Сигналы
на входах MODA,MODB
воспринимаются
микроконтроллером
в процессе
начальной
установки.В
дальнейшем
на вход MODA
выдается сигнал
LIR=0, позволяющий
осуществить
контроль за
работой микроконтроллера
в процессе
отладки цифровой
системы.
IRQ
–задает значение
внешнего сигнала
запроса прерывания.Сигналы
XTAL,EXTAL
предназначены
для задания
частоты следования
импульсов
генератора
тактовых
импульсов.Импульсы
поступают на
выход Е микроконтроллера
и синхронизируют
работу других
устройств
системы.
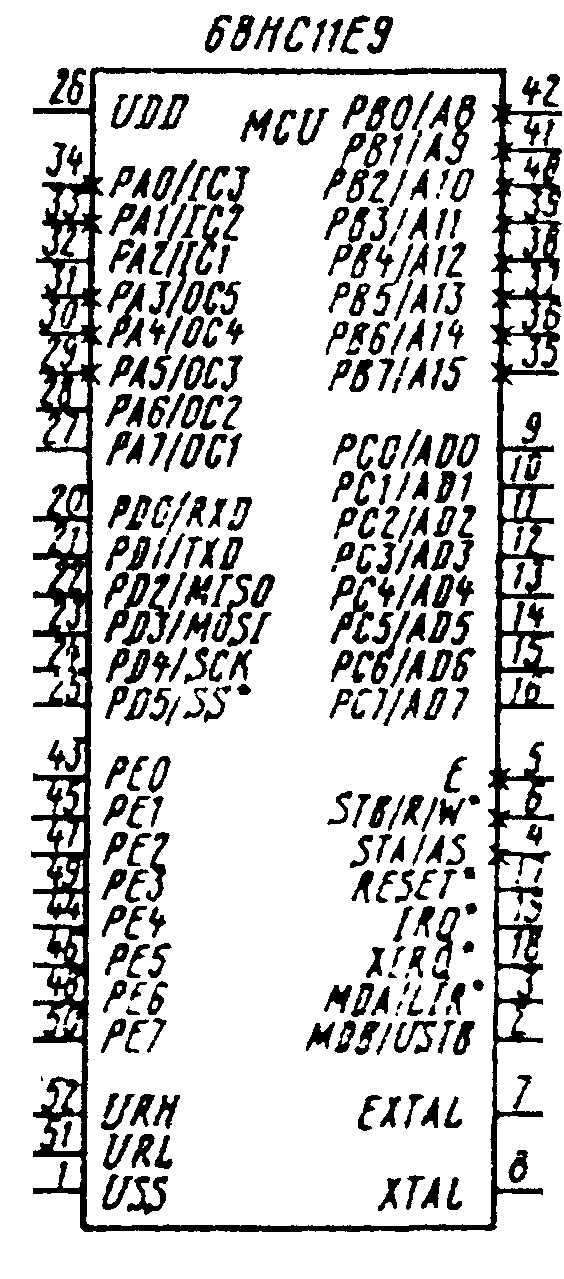
Рис.4.3
ИМС МС68НС711Е9
Для
контроля отклонения
регулируемого
параметра
используется
оптоэлектронная
пара АОТ110А.Она
представляет
собой транзисторную
оптопару средней
мощности .Излучателем
служит диодная
структура на
основе твердого
раствора
галий-алюминий-мышьяк;
приемник-кремниевый
составной
фототранзистор.Выпускается
в металлостеклянном
корпусе.Вид
корпуса и УГО
показаны на
рисунке 4.4.
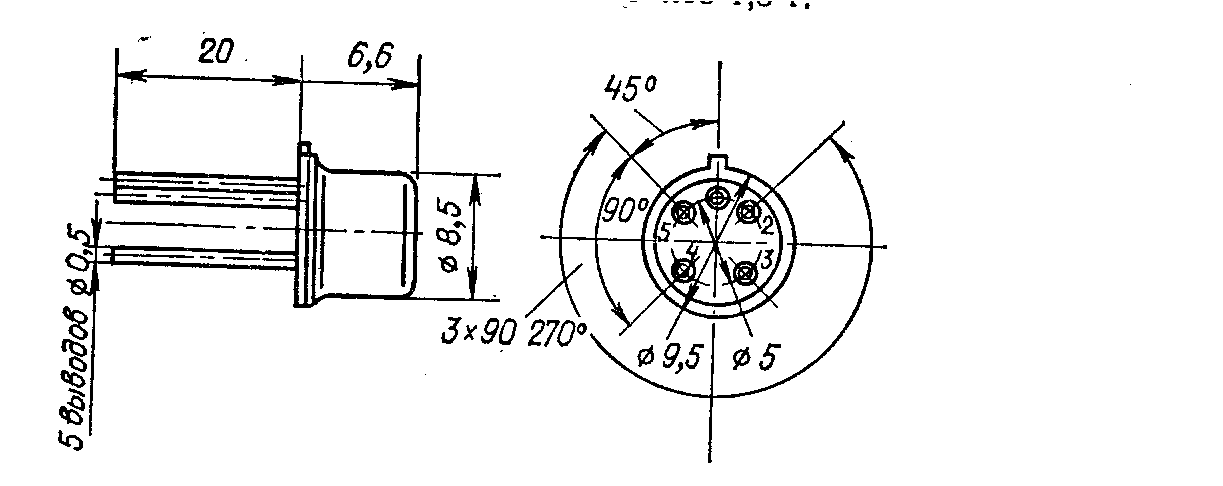
Рис.
4.4 Оптопара АОТ110А
АОТ
110А имеет следующие
параметры:
Электрические
параметры при
Токр=25С
-Входное
напряжение
при Iвх
=25мА не более
2В;
-Выходное
остаточное
напряжение
не более 1,5В;
-Ток
утечки на выходе
не более 100мкА;
-Входной
ток номинальный
10мА;
-Время
включения
1-50мкс;
-Время
выключения
5-100мкс;
-Сопротивление
изоляции не
менее 10 ГОм;
Предельные
эксплуатационные
данные
-Входной
постоянный
или средний
ток:
при
Токр=35С 30 мА;
при
Токр=70С 15 мА;
-Входной
импульсный
ток ti:
при
Токр=35С 100 мА;
при
Токр=70С 85 мА;
-Входное
обратное напряжение
0,7 В;
-Средняя
рассеиваемая
мощность
при
Токр=35С 80 мВт;
при
Токр=70С 360мВт;
-Выходной
ток 200мА;
-Дипазон
рабочей температуры
окружающей
среды -60..+70С.
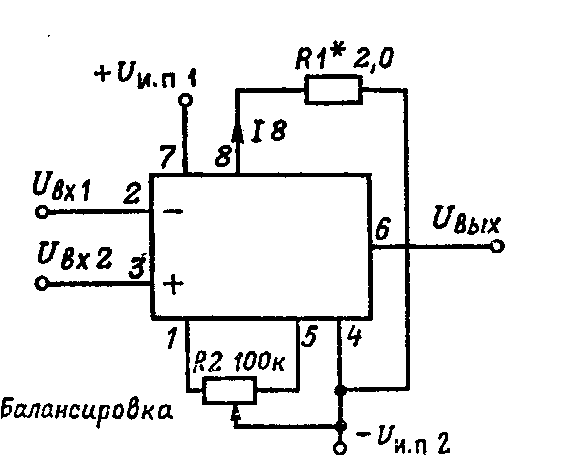
Преобразование
сигнала датчика
в напряжение,
поступающее
на вход
микроконтроллера,выполняют
два операционных
усилителя
К140УД12. Это микромощный
операционный
усилитель с
регулируемым
током потребления
и защитой выхода
от коротких
замыканий.Микросхемы
конструктивно
оформлены в
корпусе типа
301.8-2.