Автоматическая система регулирования с П-регулятором
alt="" width="615" height="403" border="0" />
Расчет расширенных частотных характеристик
При расчете
расширенных
частотных
характеристик
вместо замены
 производят
замену
производят
замену
 ,
где m=0,221 - степень
колебательности
системы. Введем
обозначение:
,
где m=0,221 - степень
колебательности
системы. Введем
обозначение:

где

Далее, аналогично обычным частотным характеристикам, задавшись рядом частот, подаваемых на вход объекта, производим расчет расширенной амплитудно-частотной характеристики по формуле:

Затем рассчитываем расширенную фазо-частотную характеристику по формуле:
 .
.
Ниже приведен
расчет расширенных
частотных
характеристик
объекта на ЭВМ
в системе MathCAD .
Расчет произведен
в диапазоне
частот 0...2 c-1 для
100 точек. Также
представлены
графики при
 следующих
характеристик:
следующих
характеристик:
- расширенной амплитудно-частотной;
- расширенной амплитудно-фазо-частотной.
- Выбор и расчет параметров настройки регуляторов
Автоматические регуляторы по своим динамическим свойствам подразделяются на линейные и нелинейные. При проектировании наиболее часто применяемых линейных регуляторов используют:
пропорциональный регулятор (П-регулятор);
интегральный регулятор (И-регулятор);
пропорционально-интегральный регулятор (ПИ-регулятор);
дифференциальный регулятор (Д-регулятор);
пропорционально-дифференциальный регулятор (ПД-регулятор);
пропорционально-интегро-дифференциальный регулятор (ПИД-регулятор).
Требования, предъявляемые к регулятору, обусловлены требованиями ко всей системе регулирования: в обеспечении устойчивости замкнутой системы. При проектировании систем стремятся обеспечить их устойчивость с некоторой гарантией, так чтобы изменение параметров в некоторых пределах не могло привести к неустойчивости. Для этой цели используются понятия запасов устойчивости систем автоматического регулирования, вводимых на основе частотного критерия Найквиста:

где
 - передаточная
функция объекта
регулирования;
- передаточная
функция объекта
регулирования;
 - передаточная
функция регулятора.
- передаточная
функция регулятора.
6.1 Расчет П-регулятора
Передаточная характеристика П-регулятора имеет вид:


|
w |
R0 |
I0 |
j0 |
Q0 |
KП |
jП |
| 0 | 0.428 | 0 | 0 | 0.183 | -2.336 | 3.142 |
| 0.5 | 0.099 | -0.438 | -1.348 | 0.202 | -0.492 | 1.794 |
| 1 | -0.257 | -0.196 | -2.489 | 0.105 | 2.456 | 0.653 |
| 1.5 | -0.208 | 0.041 | -3.336 | 0.045 | 4.627 | -0.194 |
| 2 | -0.095 | 0.109 | -3.994 | 0.021 | 4.545 | -0.852 |
6.2 Расчет И-регулятора
Передаточная характеристика И-регулятора имеет вид:


|
w |
Rо |
Iо |
kи |
| 0 | 0.428 | 0 | 0 |
| 0.5 | 0.099 | -0.438 | 0.432 |
| 1 | -0.257 | -0.196 | 0.602 |
| 1.5 | -0.208 | 0.041 | -1.025 |
| 2 | -0.095 | 0.109 | -4.291 |
6.3 Расчет ПИ-регулятора
Передаточная характеристика ПИ-регулятора имеет вид:
где
|
w |
Rо |
KП |
kи |
| 0 | 0.428 | -2.336 | 0 |
| 0.5 | 0.099 | -0.492 | 0.432 |
| 1 | -0.257 | 2.456 | 0.602 |
| 1.5 | -0.208 | 4.627 | -1.025 |
| 2 | -0.095 | 4.545 | -4.291 |
Ниже приведены результаты расчета на ЭВМ в электронных таблицах параметров П, И, ПИ-регуляторов, а также графики изменения этих параметров.
- Передаточные функции системы
7.1 Разомкнутые системы
Структура разомкнутой системы автоматического регулирования может быть изображена следующим образом:
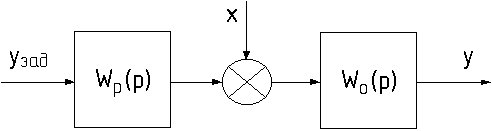
Передаточной функцией такой системы будет выражение:
 .
.
Запишем передаточные функции систем с регуляторами:
- П-регулятором:

- И-регулятором:

- ПИ-регулятором:

7.2 Замкнутые системы
Структура замкнутой системы автоматического регулирования может быть изображена следующим образом:
.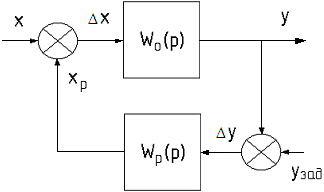
Передаточной функцией такой системы будут выражения:
-
по возмущению  ;
;
-
по управлению  .
.
Подставив все известные выражения передаточных функций объекта регулирования и регуляторов, получим передаточные функции систем с различными регуляторами:
- с П-регулятором:


- с И-регулятором:


- с ПИ-регулятором:


- Исследование устойчивости АСР
Исследование замкнутых АСР на устойчивость предполагает получение ответов на следующие вопросы. Является ли система с рассчитанным регулятором устойчивой, то есть, возвращается ли она в состояние равновесия при наличии возмущений? Какие из параметров системы (объекта и регулятора) и каким образом влияют на устойчивость? При каких предельных значениях параметров система становится неустойчивой? Каков запас устойчивости системы при заданных значениях параметров?
Ввиду сложности решения поставленных задач часто ограничиваются только установлением факта устойчивости заданной системы. Также нужно помнить, что, так как расчет регулятора ведется не только из условия обеспечения устойчивости системы, но и из условия обеспечения заданного качества регулирования, то такая система уже будет устойчивой. Если задана передаточная функция объекта высокого порядка или замкнутая АСР с некоторыми изменяемыми параметрами, то факт устойчивости не очевиден и нужно выполнить такой анализ.
Для исследования на устойчивость замкнутых систем автоматического регулирования разработано множество методов. Среди них определение устойчивости по корням характеристического уравнения, по критерию Гурвица, по критерию Рауса, по частотному критерию Михайлова, по частотному критерию Найквиста, D-разбиение и другие.
8.1 Обзор методов исследования на устойчивость
При определении устойчивости по корням характеристического уравнения исследование производится по оператору левой части дифференциального уравнения, либо по полиному знаменателя исходной передаточной функции. В этом случае система будет устойчивой, если действительные корни характеристического уравнения, действительные части комплексных корней будут отрицательны. Запас устойчивости при таком способе определения устойчивости можно графически представить как расстояние от значения корня до мнимой оси координат.
При оценке устойчивости по критерию Гурвица из коэффициентов характеристического уравнения составляется определитель Гурвица вида:
Для устойчивости АСР необходимо и достаточно, чтобы главный определитель и все определители низших порядков были одного знака с an.
Для проверки устойчивости по критерию Рауса составляется таблица коэффициентов по следующим правилам (см. табл.).
| 1 | - |
an |
an-2 |
an-4 |
| 2 | - |
an-1 |
an-3 |
an-5 |
| 3 |
rn=an/an-1 |
c13=an-2-rn.an-3 |
c23=an-4-rn.an-5 |
c33=an-6-rn.an-7 |
| 4 |
rn-1=an-1/c13 |
c14=an-3-rn-1.c23 |
c24=an-5-rn-1.c33 |
c34=an-7-rn-1.c43 |
| 5 |
rn-2=c13/c14 |
c15=c23-rn-2.c24 |
c25=c33-rn-2.c34 |
c35=c43-rn-2.c44 |
Система будет устойчива, если все коэффициенты таблицы Рауса положительны, то есть an>0, an-1>0, c13>0, c14>0, c15>0 и так далее. Если в характеристическом уравнении an<0, то умножаем все коэффициенты исходного характеристического уравнения на -1.
Для исследования на устойчивость систем с запаздыванием по корням характеристического уравнения по критериям Рауса и Гурвица звено запаздывания необходимо разложить в ряд Паде с учитыванием соответствующего числа членов, перемножить полученную передаточную функцию с передаточной функцией объекта, а затем получить передаточную функцию замкнутой АСР с регулятором.
Ввиду значительной трудоемкости при исследовании на устойчивость систем высокого порядка по критериям Рауса и Гурвица обычно используют ЭВМ.
Для исследования
устойчивости
по критерию
Михайлова
строится годограф
вектора
 характеристического
уравнения
А(р)=0 замкнутой
системы. Для
устойчивости
системы необходимо
и достаточно,
чтобы вектор
,
описывающий
своим концом
кривую Михайлова
при изменении
частоты
характеристического
уравнения
А(р)=0 замкнутой
системы. Для
устойчивости
системы необходимо
и достаточно,
чтобы вектор
,
описывающий
своим концом
кривую Михайлова
при изменении
частоты
 от 0 до
от 0 до
 ,
начав свое
движение с
положительной
действительной
оси и вращаясь
против часовой
стрелки, последовательно
проходил n
квадрантов,
нигде не обращаясь
в нуль (n- порядок
характеристического
уравнени
,
начав свое
движение с
положительной
действительной
оси и вращаясь
против часовой
стрелки, последовательно
проходил n
квадрантов,
нигде не обращаясь
в нуль (n- порядок
характеристического
уравнени
Критерий
устойчивости
Найквиста
формулируется
следующим
образом: если
разомкнутая
система устойчива,
то для устойчивости
системы в замкнутом
состоянии
необходимо
и достаточно,
чтобы амплитудно-фазовая
характеристика
разомкнутой
системы не
охватывала
точку на действительной
оси с координатами
 .
.
Необходимо отметить, что при исследованиях на устойчивость по критериям Михайлова и Найквиста рассчитываются и строятся графики АФХ характеристического уравнения (критерий Михайлова) или разомкнутой АСР (критерий Найквиста), что является трудоемкой задачей. Поэтому для построения АФХ используется ЭВМ.
Частотные критерии применимы и для исследования на устойчивость систем с запаздыванием в общем виде, без разложения в ряд Паде передаточной функции звена запаздывания, используя его представление в форме Эйлера.
По АФХ замкнутой системы можно определить запас устойчивости по амплитуде и по фазе.
Если необходимо оценить влияние на устойчивость некоторого параметра (коэффициента) системы, например, коэффициента усиления, и определить область значений, внутри которой по этому параметру система будет оставаться устойчивой, то применяют к характеристическому уравнению, в которое входит исследуемый параметр, метод D-разбиения.
Для этого:
- характеристическое уравнение А(р)=0 разбивают на две составляющие (зависящую и не зависящую от параметра)
 ;
;
- заменяют
p на
 и выражают
параметр в
комплексной
форме
и выражают
параметр в
комплексной
форме
 ;
;
- изменяют
частоту
в пределах от
0 до
и, вычислив
координаты
точек, строят
границу устойчивости;
- полученная кривая дополняется ее зеркальным отображением относительно вещественной оси;
- штрихуют
границу слева
при движении
по кривой в
направлении
возрастания
;
область, полностью окаймленная штриховкой, является областью устойчивости;
по точкам пересечения граничной кривой с вещественной осью определяют диапазон изменения значений параметра q, при которых система остается устойчивой.
8.2 Проверка устойчивости по критерию Рауса
В данной курсовой работе оценку устойчивости замкнутой системы автоматического регулирования произведем по критерию Рауса так как этот метод не предполагает нахождение определителей, а значит наименее трудоемок. Для проверки устойчивости по критерию Рауса заполним таблицы коэффициентов аналогично таблице 14.
Для системы с П-регулятором составим таблицу 15 подставив в соответствующие ячейки коэффициенты при р из знаменателя передаточной характеристики системы.
Таблица 15
Таблица Рауса для системы с П-регулятором
| 1 | - |
An=0,179 |
An-2=2,075 |
An-4=2,157 |
| 2 | - |
An-1=0,884 |
An-3=4,176 |
An-5=1,975 |
| 3 |
Rn=0,202 |
c13=1,395 |
c23=1,736 |
c33=0 |
| 4 |
Rn-1=0,719 |
c14=3,053 |
c24=1,89 |
c34=0 |
| 5 |
Rn-2=0.422 |
c15=0,873 |
c25=0 |
c35=0 |
| 6 |
Rn-3=3,154 |
c16=1,89 |
c26=0 |
c36=0 |
| 7 |
Rn-4=0,468 |
c17=0 |
c27=0 |
c37=0 |
Из таблицы 15 видно, что замкнутая система с П-регулятором устойчива так как выполняется необходимое условие устойчивости по критерию Рауса.
Аналогично составляем таблицы Рауса (табл. 16 и табл. 17) для замкнутых систем автоматического регулирования с И-регулятором и ПИ-регулятором соответственно.
Таблица 16
Таблица Рауса для системы с И-регулятором
| 1 | - |
An=0.179 |
An-2=2.229 |
An-4=3.249 |
An-6=0.284 |
| 2 | - |
An-1=0.884 |
An-3=3.663 |
An-5=0.721 |
0 |
| 3 |
Rn=0.202 |
c13=1.487 |
c23=3.103 |
c33=0.284 |
c43=0 |
| 4 |
Rn-1=0.594 |
c14=1.819 |
c24=0.552 |
c34=0 |
c44=0 |
| 5 |
Rn-2=0.818 |
c15=2.651 |
c25=0.284 |
c35=0 |
c45=0 |
| 6 |
Rn-3=0.686 |
c16=0.357 |
c26=0 |
c36=0 |
c46=0 |
| 7 |
Rn-4=7.419 |
c17=0.284 |
c27=0 |
c37=0 |
c47=0 |
| 8 |
Rn-6=1.258 |
c18=0 |
c28=0 |
c38=0 |
c48=0 |
Таблица 17
Таблица Рауса для системы с ПИ-регулятором
| 1 | - |
An=0,179 |
An-2=2,127 |
An-4=2,665 |
An-6=0,392 |
| 2 | - |
An-1=0,884 |
An-3=3,959 |
An-5=1,263 |
0 |
| 3 |
Rn=0,202 |
c13=1,325 |
c23=2,409 |
c33=0,392 |
c43=0 |
| 4 |
Rn-1=0,667 |
c14=2,352 |
c24=1,002 |
c34=0 |
c44=0 |
| 5 |
Rn-2=0,563 |
c15=1,845 |
c25=0,392 |
c35=0 |
c45=0 |
| 6 |
Rn-3=1,275 |
c16=0,502 |
c26=0 |
c36=0 |
c46=0 |
| 7 |
Rn-4=3,677 |
c17=0,392 |
c27=0 |
c37=0 |
c47=0 |
| 8 |
Rn-6=1,28 |
c18=0 |
c28=0 |
c38=0 |
c48=0 |
Из таблиц видно, что как система с И-регулятором, так и система с ПИ-регулятором устойчивы. Факт устойчивости систем подтверждает правильность расчета параметров регуляторов, так как этот расчет проводился из условия обеспечения устойчивости системы регулирования.
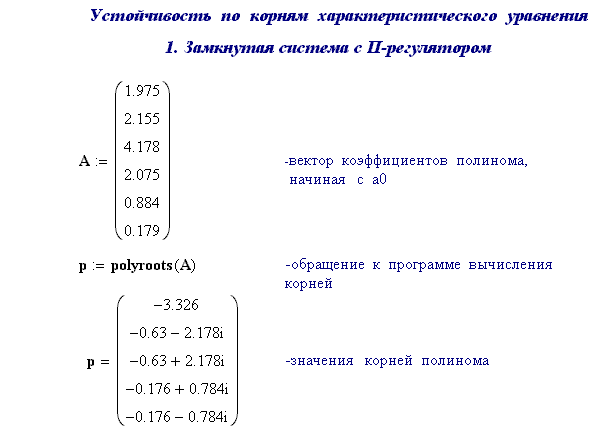
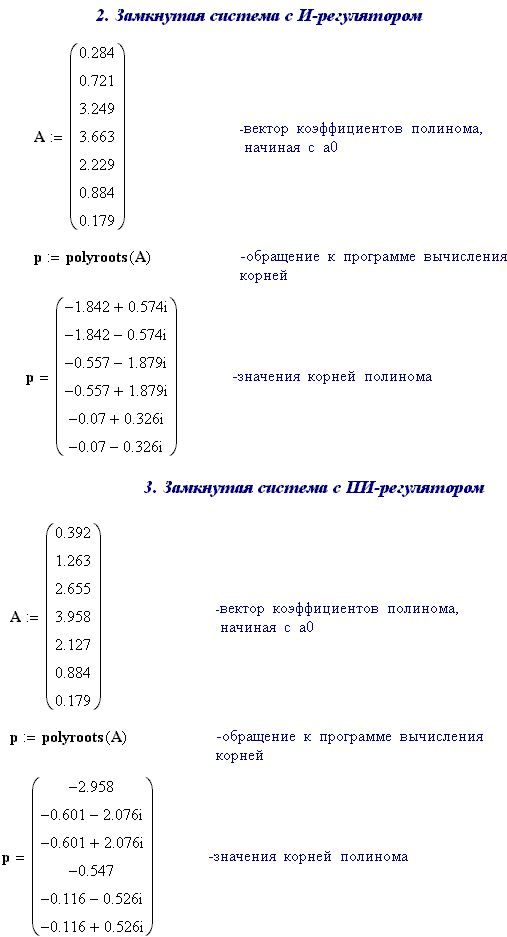
8.3 Проверка устойчивости по корням характеристического уравнения
Ниже приведены результаты проверки устойчивости замкнутых систем по корням характеристического уравнения на ЭВМ в системе MathCad.
- Приведение к системе дифференциальных уравнений
Система дифференциальных уравнений устанавливает связь выходной координаты с входными в переходном процессе. То есть если передаточная характеристика системы имеет вид:
то связь выходной координаты с входной можно записать так:
 .
.
Для приведения к системе дифференциальных уравнений выполняем следующие действия:
- все члены правой части переносим в левую часть и группируем члены с одинаковыми порядками производных:
 ;
;
- формально интегрируем полученное уравнение (порядок уравнения во всех членах уменьшается на 1). Интегрирование выполняется до тех пор, пока не исчезнут все р в левой части.
9.1 Система с П-регулятором
Передаточной функцией системы автоматического регулирования с П-регулятором по возмущению является найденное ранее выражение:
Тогда в соответствии с вышеизложенным, запишем:

пусть
 ;
;

обозначим
 ,
тогда
,
тогда




Тогда окончательно система запишется следующим образом:
Передаточная функция системы с П-регулятором по управлению:
Тогда в соответствии с вышеизложенным, запишем нормальную систему:
9.2 Система с И-регулятором
Передаточная функция системы с И-регулятором по возмущению:
Тогда в соответствии с вышеизложенным, запишем нормальную систему:
Передаточная функция системы с И-регулятором по управлению:
Тогда в соответствии с вышеизложенным, запишем нормальную систему:
9.3 Система с ПИ-регулятором
Передаточная функция системы с ПИ-регулятором по возмущению:
Тогда в соответствии с вышеизложенным, запишем нормальную систему:
Передаточная функция системы с ПИ-регулятором по управлению:
Тогда в соответствии с вышеизложенным, запишем нормальную систему:
- Построение переходных процессов
Несмотря на то, что ряд оценок качества функционирования АСР могут быть вычислены без построения таблиц и графиков переходных процессов, тем не менее, окончательный ответ о пригодности системы можно получить только по результатам исследования переходных процессов. Поэтому на завершающей стадии проектирования АСР всегда стремятся тем или иным способом получить оценки динамических характеристик системы и сравнить их с заданными.
Переходные процессы рассчитывают для замкнутых АСР по возмущающему или управляющему воздействиям. Если по возмущению, то регулятор должен в течении переходного процесса компенсировать это возмущение, а объект - возвратиться в то же состояние, в котором он был до приложения возмущения. Если по управлению, то регулятор должен отработать управляющее воздействие и регулируемая величина на выходе объекта должна принять новое, заданное значение.
При использовании для построения переходных процессов любых методов (аналитические, численные) в качестве исходного материала необходимо иметь математическую модель замкнутой системы в форме передаточной функции, дифференциального уравнения или уравнений АФХ, которые можно получить из передаточной функции.
Если передаточная функция замкнутой системы приведена к дифференциальному уравнению с произвольной правой частью, то аналитическое решение ищется в такой последовательности:
- находятся корни характеристического уравнения;
- строится частное решение с неопределенными коэффициентами;
- это частное решение подставляется в исходное уравнение;
- посредством приравнивания коэффициентов при одинаковых степенях х находятся все неопределенные коэффициенты;
- записывается искомое частное решение.
Это решение и будет являться зависимостью выходной координаты системы от времени.
При использовании численных методов для построения переходных процессов необходимо:
- передаточную функцию замкнутой системы преобразовать в дифференциальное уравнение, разложив при этом звено запаздывания в ряд Паде;
- дифференциальное уравнение n порядка привести к системе из n дифференциальных уравнений первого порядка;
- задать уравнение для возмущающего воздействия;
- выбрать один из численных методов для решения полученной системы; предпочтительнее методы с итерационным уточнением решения на каждом шаге (усовершенствованный метод Эйлера-Коши) или с автоматическим выбором величины шага для обеспечения требуемой точности (метод Рунге-Кутта);
- составить программу для ЭВМ или использовать стандартную из состава математического обеспечения.
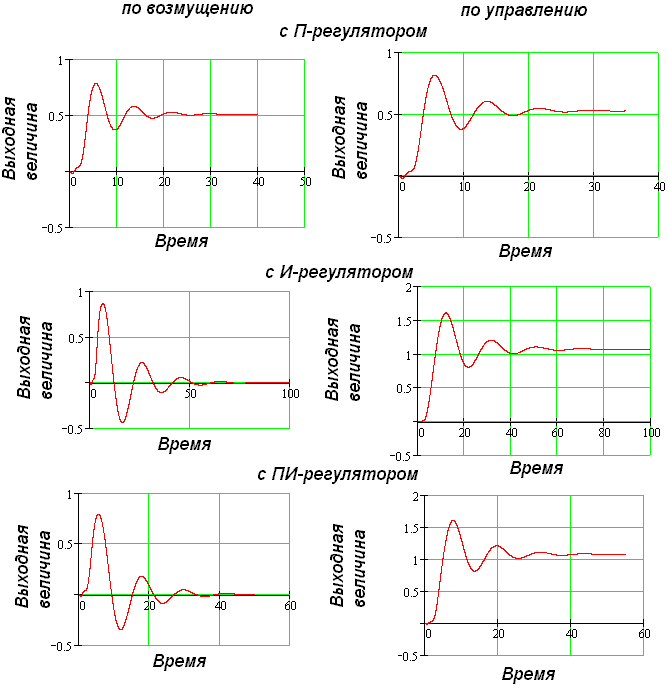
Ниже представлены графики переходных процессов по управлению и возмущению систем с П, И и ПИ-регуляторами. Графики построены в системе MathCad.
- Оценка качества функционирования АСР
Как всякая динамическая система, АСР может находиться в одном из двух режимов – стационарном (установившемся) и переходном. Стационарный режим может быть двух типов: статический и динамический. В статическом режиме, при котором все внешние воздействия и параметры системы не меняются, качество управления характеризуется точностью.
Исчерпывающее представление о качестве переходного процесса дает, естественно, сама кривая процесса. Однако при разработке АСР необходимо иметь возможность судить об основных показателях качества переходного процесса без построения их кривых, по каким-либо косвенным признакам, которые определяются более просто и, кроме того, позволяют связать показатели качества непосредственно со значениями параметров АСР. Такие косвенные признаки называются критериями качества переходного процесса.
Существуют три группы критериев качества: корневые, интегральные и частотные.
Группа корневых критериев основана на оценке качества переходного процесса по значениям полюсов и нулей передаточной функции АСР. В частном случае, когда нулей нет, качество переходного процесса определяется только полюсами.
Переходный процесс в устойчивой системе распадается на затухающие и колебательные составляющие. Если найти длительность самой длительной составляющей и величину колебательности самой колебательной составляющей, то по ним можно оценить верхние пределы величин длительности и колебательности всего переходного процесса.
Интегральными критериями качества называются такие, которые одним числом оценивают и величины отклонений, и время затухания переходного процесса. Такие критерии качества используются для определения оптимальных значений варьируемых параметров по минимуму значения соответствующей интегральной оценки. Применяются интегральные критерии обычно в теории оптимальных систем.
Наибольшее распространение получили частотные критерии, в основу которых положено использование частотных характеристик.
Рассмотрим некоторые критерии качества работы АСР:
1) статическая ошибка – это величина отклонения выходного параметра от заданного значения в установившемся режиме:
если в числителе передаточной функции системы нет свободного члена, то статическая ошибка равна нулю;
2) динамическая ошибка ∂y – это максимальное отклонение от установившегося значения в переходном процессе;
3) время регулирования – это время tр, за которое выходная координата системы вошла в зону допустимой погрешности регулирования 2∙δ, где δ определяется следующим образом:
4) величина перерегулирования:

5) степень затухания:

учитывая,
что
 ;
с данным критерием
тесно связан
еще один параметр
– степень
колебательности
системы
;
с данным критерием
тесно связан
еще один параметр
– степень
колебательности
системы
 ;
данные критерии
взаимосвязаны
следующими
соотношениями:
;
данные критерии
взаимосвязаны
следующими
соотношениями:
проведя небольшой анализ приведенных соотношений, можно выделить два крайних состояния системы: а) апериодический процесс ψ=1, m=∞; б) незатухающие колебания ψ=0, m=0; часто в расчетах применяют ψ=0.75, m=0.221; все системы регулированию рассчитываются с заданным значением либо ψ, либо m.
АСР считается оптимально настроенной системой, если она удовлетворяет двум или трем критериям качества, например, динамическая ошибка, степень затухания и время регулирования удовлетворяют заданным значениям.
Определим
критерии качества
для замкнутой
АСР по возмущению
с П-регулятором.
Исходя из графика
переходных
процессов,
статическая
ошибка составляет
 ,
динамическая
ошибка:
,
динамическая
ошибка:
 .
.
Чтобы определить
время регулирования,
рассчитаем
сначала допустимую
погрешность
регулирования:
 .
.
Таким образом,
время регулирования
имеет следующее
значение
 .
.
Вычислим
величину
перерегулирования:
 .
.
Воспользовавшись
заданным значением
степени колебательности
системы регулирования,
определим
степень затухания:
 .
.
Аналогично рассчитываем прямые показатели оценки качества для систем с И и ПИ-регуляторами. Результаты сводим в табл.
Прямые показатели качества АСР
| по возмущению | по управлению | |||||
| П | И | ПИ | П | И | ПИ | |
| дин. ошибка | 0,28 | 0,87 | 0,79 | 0,29 | 0,54 | 0,52 |
| стат. ошибка | 0,5 | 0 | 0 | 0,53 | 1,07 | 1,08 |
|
ст.
затух.
|
0,75 | 0,75 | 0,75 | 0,75 | 0,75 | 0,75 |
| ст. колеб. m | 0,221 | 0,221 | 0,221 | 0,221 | 0,221 | 0,221 |
|
перерег.
|
0,46 | 0,51 | 0,44 | 0,52 | 0,5 | 0,52 |
|
tрег., с |
14,76 | 88,02 | 44,96 | 14,57 | 33,6 | 20,56 |


12 ВЫВОДЫ
1. Статическая модель объекта тем точнее описывает поведение объекта, чем выше порядок полинома.
2. Применительно к динамической модели выяснилось, что ее точность возрастает только до определенного порядка, а затем точность падает.
3. Автоматическая система регулирования с П-регулятором имеет наименьшее значение максимальной динамической ошибки, однако такой системе присуща статическая ошибка, поэтому П-регуляторы могут применяться в случаях, когда допускается отклонение регулируемой величины от заданного значения в равновесном состоянии системы (более 10%).
4. АСР с И-регулятором характеризуется относительно большой динамической ошибкой и перерегулированием, а также длительным переходным процессом, поэтому область применения И-регуляторов ограничивается объектами, допускающими относительно большое максимальное отклонение регулируемой величины. Ни при каких значениях параметров системы И-регулятор не может обеспечить устойчивого регулирования объекта, не обладающего самовыравниванием.
5. АСР с ПИ-регулятором имеет наиболее оптимальные параметры как по динамической ошибке, так и по времени переходного процесса, степени затухания, колебательности и перерегулированию, поэтому ПИ-регуляторы могут применяться при любых требованиях к значению установившегося отклонения и любом диапазоне возмущающих воздействий, если допустимое время регулирования значительно.
ЛИТЕРАТУРА
1. Дурновцев В.Я., Ширяев А.А. Расчет автоматических систем регулирования. 1. Расчет линейных АСР. - Указания по выполнению индивидуальных заданий и курсовых проектов. - Томск: Отделение № 1 ТПИ, 2988. - 92 с.
2. Основы теории автоматического регулирования: Учебник для машиностроительных специальностей вузов/В.И. Крутов, Ф.М. Данилов, П.К. Кузьмик и др.; Под ред. В.И. Крутова. - 2-е изд., перераб. и доп. - М.: Машиностроение. 1984. 368 с., ил.