Разработка алгоритмов контроля и диагностики системы управления ориентацией космического аппарата
упрощено [1, 3]. Проделав аналогичные выкладки для нахождения проекций гравитационного момента можно, написать:
 (3.21)
(3.21)
Таким образом,
гравитационный
момент, действующий
вокруг одной
из осей триэдра
Oxyz, зависит от
разности моментов
инерции относительно
двух других
осей. Чтобы
сделать анализ
полученных
выражений более
наглядным,
рассмотрим
гравитационный
момент, действующий
на тело S, при
условии, что
оси 0Z и 0Zo
совпадают. Это
соответствует
повороту тела
S, который
можно назвать
поворотом по
тангажу, на
угол
 (рис. 3.6).
(рис. 3.6).
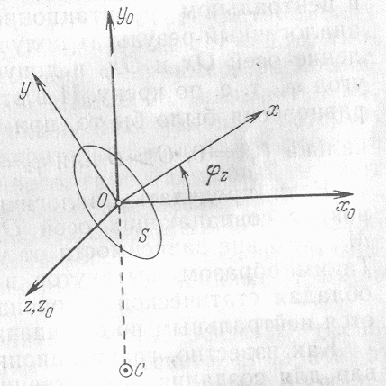
Рис. 3.6 - Поворот тела вокруг оси Z
При сделанных предположениях
 ,
,
 ;
;
н, следовательно,
 ;
;
Как и надо было
ожидать, при
 гравитационный
момент обращается
в нуль, поскольку
триэдры Охуz
и 0XoYoZo в этом
случае совпадают
[1, 3]. При монотонном
увеличении
гравитационный
момент обращается
в нуль, поскольку
триэдры Охуz
и 0XoYoZo в этом
случае совпадают
[1, 3]. При монотонном
увеличении
 от
гравитационный
момент возрастает,
достигает
максимума при
от
гравитационный
момент возрастает,
достигает
максимума при
 ,
затем убывает
и вновь становится
равным нулю
при
,
затем убывает
и вновь становится
равным нулю
при
 .
Таким образом,
существует
два положения
равновесия:
при
.
Таким образом,
существует
два положения
равновесия:
при
 и при
.
Однако, из этих
положений одно
соответствует
статической
устойчивости
(при малом изменении
,
возникает
момент противоположного
знака), другое
– статистической
неустойчивости.
Действительно,
производная
и при
.
Однако, из этих
положений одно
соответствует
статической
устойчивости
(при малом изменении
,
возникает
момент противоположного
знака), другое
– статистической
неустойчивости.
Действительно,
производная
 ;
;
при
и при
имеет разные
знаки. Какое
из этих двух
положений
соответствует
статистической
устойчивости,
зависит от
знака (B-A)
[1, 3, 8]. Условие
устойчивости
(возникновение
восстанавливающего
момента при
малом отклонении)
 реализуется
при
для A>B
или при
для B>A,
т.е. в обоих случаях
вытянутая ось
тела должна
занимать вертикальное
положение.
реализуется
при
для A>B
или при
для B>A,
т.е. в обоих случаях
вытянутая ось
тела должна
занимать вертикальное
положение.
Таким образом, вытянутое в вертикальном положении тело, обладая статистической устойчивостью по тангажу и крену, является нейтральным по отношению к углу рыскания [1, 3, 4].
3.3 Гироскопический измеритель угловой скорости
Для пересчета векторов сил, моментов и т.д. из одной системы координат в другую необходимо вычислить матрицу перехода, элементами которой являются косинусы углов между осями исходной и повернутой систем координат [1, 3, 21]. Эта матрица определяется последовательностью углов поворота, которые позволяют перейти от одной системы координат к другой. Осуществление такого рода перехода требует не более трех поворотов исходной системы координат. Выбор последовательности углов поворота обычно определяется физическим содержанием задачи [1, 3, 5]. Это могут быть углы, измеренные с помощью приборов системы управления, от которых зависят аэродинамические и другие нагрузки на ЛА и т.д. [1]
Применение направляющих косинусов в космических приложениях обусловлено, прежде всего, тем, что они могут быть непосредственно измерены на борту космического аппарата [5].
1. Сформируем матрицу A [3,3] – переход от ССК к ПСК ГИВУС:
| ССК | ||||
| ПСК | x | y | z | |
| x | [1,1] | [1,2] | [1,3] | |
| y | [2,1] | [2,2] | [2,3] | |
| z | [3,1] | [3,2] | [3,3] |
=А
Матрица dА получается вследствие трех элементарных поворотов:
вокруг оси х на АД(1):

Рис.3.7 - Схема поворота первого типа вокруг оси х
Матрица направляющих косинусов:
 ;
;
вокруг оси y на АД(2):
Рис. 3.8 - Схема поворота второго типа вокруг оси у
Матрица направляющих косинусов:
 ;
;
вокруг оси z на АД(3):
Рис. 3.9 - Схема поворота третьего типа вокруг оси z
Матрица направляющих косинусов:
 ;
;

Так как
 ,
то :
,
то :
 .
.
2. Сформируем матрицу [6,3] – переход от ПСК ГИВУС к ЧЭ:
| ПСК | |||
| оси | x | y | z |
| 1 | [1,1] | [1,2] | [1,3] |
| 2 | [2,1] | [2,2] | [2,3] |
| 3 | [3,1] | [3,2] | [3,3] |
| 4 | [4,1] | [4,2] | [4,3] |
| 5 | [5,1] | [5,2] | [5,3] |
| 6 | [6,1] | [6,2] | [6,3] |
 (
( )
)
3. Сформируем матрицу Am[3,3] погрешностей установки ГИВУС в ССК:
 .
.
Матрица Аm
получается,
если предположить
что

4. Сформируем матрицу D[6,3] - переход от CСК к ЧЭ:
D=*A*ADm.
5. Определяется время точностной готовности MGOT.
6. Вычислим угловой уход.

где [k] – угол ухода;
pr[k] – значение угла ухода, соответствующее предыдущему такту;
- паспортизируемый уход;
- погрешность паспортизации;
 - математическое
ожидание;
- математическое
ожидание;
 - среднеквадратичное
отклонение
случайного
ухода;
- среднеквадратичное
отклонение
случайного
ухода;
NORM( )
– случайная
составляющая,
отвечающая
нормальному
закону распределения.
)
– случайная
составляющая,
отвечающая
нормальному
закону распределения.
7. Приведем измеренный сигнал к осям ЧЭ:
 ,
,
где
 - угол поворота
объекта, приведенный
к осям ЧЭ (вектор,
- угол поворота
объекта, приведенный
к осям ЧЭ (вектор,
 );
);
 - угол поворота
объекта.
- угол поворота
объекта.
8. Учет углового ухода, шума измерений и переходного процесса при достижении готовности ЧЭ [21]:

где [k] – интеграл, измеренный ЧЭ;
pr[k] - интеграл, измеренный ЧЭ на предыдущем такте;
BSH[k] – «белый шум», распределенный по нормальному закону;
BSTR[k] – шум, создаваемый системой термостатирования;
АPER – величина помехи в переходном процессе;
MGOT – время готовности;
NGOT – счетчик готовности k-го ЧЭ.
 .
.
9. Определим число импульсов [6, 10, 14].
Для k=1...6:

где U[k] – промежуточная переменная;
 - сумма импульсов
k-го ЧЭ за
все такты;
- сумма импульсов
k-го ЧЭ за
все такты;
 - промежуточное
значение цены
импульсов;
- промежуточное
значение цены
импульсов;
 - промежуточное
значение погрешности
цены импульсов.
- промежуточное
значение погрешности
цены импульсов.

где  - сумма импульсов
k-го ЧЭ за
такт;
- сумма импульсов
k-го ЧЭ за
такт;
Ent{…} – операция выделения целой части.
 .
.
4 АЛГОРИТМЫ ОБРАБОТКИ ИНФОРМАЦИИ И КОНТРОЛЯ СУО И СТАБИЛИЗАЦИИ КА
4.1 Синтез наблюдателя Льюинбергера
Рассмотрим объект, описываемый уравнениями [7, 22]:
 (4.1)
(4.1)
 (4.2)
(4.2)
где х – n-мерный вектор состояния;
u – m-мерный вектор детерминированных (доступных измерению) входных сигналов;
А, В, Н – матрицы размеров nxn, nxm, 1xn.
Предполагая, что известны как измеренные величины скалярный входной сигнал z, матричный входной сигнал u(t) и матрицы объекта А, В, Н, произведем синтез устройства для наблюдения вектора состояния объекта х [7, 22].
Пусть
 – оценочное
значение вектора
х, тогда, согласно
(4.2), оценочное
значение выходного
сигнала
– оценочное
значение вектора
х, тогда, согласно
(4.2), оценочное
значение выходного
сигнала
 .
Оценка
содержит ошибку,
если
.
Оценка
содержит ошибку,
если
 отличается
от значения,
полученным
реальным измерением
сигнала z.
задача заключается
в том, чтобы
ошибку оценивания
отличается
от значения,
полученным
реальным измерением
сигнала z.
задача заключается
в том, чтобы
ошибку оценивания
 свести к нулю.
[7, 16, 22]
свести к нулю.
[7, 16, 22]
Зная u(t) А, В и начальное значение x(t0) можно оценить x(t), если подвести сигнал u(t) к электронной модели объекта
 (4.3)
(4.3)
где x(t0) задано.
Недостаток
оценивающего
устройства
(4.3) состоит в том,
что он действует
по разомкнутому
циклу [7, 16, 22]. Поскольку
данные об u(t)
А, В - неточны,
то после некоторого
времени работы
это устройство
будет давать
слишком неточную
оценку вектора
х. Чтобы при
сохранении
линейности
данного устройства
устранить
отмеченный
недостаток,
было предложено
ошибку
 ввести в каждое
из уравнений
системы (4.3), т.е.
перейти к
оценивающему
устройству
(4.4) [22]:
ввести в каждое
из уравнений
системы (4.3), т.е.
перейти к
оценивающему
устройству
(4.4) [22]:
 (4.4)
(4.4)
где
Устройство, описываемое уравнением (4.4), производит оценку вектора х по замкнутому циклу и называется наблюдающим устройством идентификации или фильтром Льюинбергера [7, 16, 22].
Если ошибку оценивания определить как (4.5)
 (4.5)
(4.5)
то эту ошибку можно находить из уравнения (4.6):
 (4.6)
(4.6)
получаемого
вычитанием
уравнения (4.1)
из уравнения
(4.4). Выбрав коэффициенты
усиления
 так, чтобы система
(4.6) была устойчивой,
получим
так, чтобы система
(4.6) была устойчивой,
получим
 при
при
 .
Другими словами,
с ростом t
оценка
.
Другими словами,
с ростом t
оценка
 стремится к
оцениваемому
вектору х(t)
[7 , 16].
стремится к
оцениваемому
вектору х(t)
[7 , 16].
Если по измеренному
сигналу z(t)
объект (4.1) полностью
наблюдаем, то
выбором коэффициентов
можно замкнутой
системе (4.4) придать
любое желаемое
распределение
корней, т.е. можно
синтезировать
наблюдающее
устройство
идентификации.
Если же по выходному
сигналу z(t)
вектор состояния
объекта х наблюдаем
не полностью,
то с помощью
начальных
условий можно
оценить лишь
наблюдаемую
часть вектора
состояния [22].
4.2 Алгоритм оценки угловой скорости
Построим систему оценки угловой скорости.
Имеем систему уравнений [1, 3]:
 (4.7)
(4.7)
где
 - проекции мгновенной
угловой скорости
объекта на оси
ССК,
- проекции мгновенной
угловой скорости
объекта на оси
ССК,
 -
моменты инерции
объекта,
-
моменты инерции
объекта,
 -
управляющий
и возмущающий
моменты соответственно,
-
управляющий
и возмущающий
моменты соответственно,
i = x, y, z.
Вектор моментов
является функцией
 .
Таким образом,
имеется три
уравнения,
связывающие
шесть независимых
функций
.
Таким образом,
имеется три
уравнения,
связывающие
шесть независимых
функций
 .
.
Получим еще три уравнения при помощи кинематических уравнений, которые в кватернионной форме имеют вид [5]:
 (4.8)
(4.8)
Для малых углов имеем:
 (4.9)
(4.9)
Запишем уравнения (4.7) с учетом (4.9):
 (4.10)
(4.10)
Для построения системы оценки примем следующую модель объекта наблюдения:
где
 - оцениваемое
приращение
угла поворота,
- оцениваемое
приращение
угла поворота,
u – вектор управления.
Пусть производится измерение приращения угла поворота j:

где
 - фактический
угол поворота
объекта за такт
БЦВМ.
- фактический
угол поворота
объекта за такт
БЦВМ.
Матрица Н из уравнения (4.8) имеет вид: [1 0 0].
Модель системы наблюдения (4.10) представим в форме Коши:
Тогда система (4.10) примет вид:
 (4.11)
(4.11)
т.е. в векторной форме получим уравнение (4.7), где
Вектор состояния x(t) определяется решением векторно-матричного уравнения (4.7):

где Ф(t, t0) – фундаментальная матрица, являющаяся переходной для (4.7).
Ф(t, t0) = еА(t - t0) (4.12)
Найдем еА(t - t0) используя преобразование Лапласа.
Найдем Ф-1(s):
detФ(s) = S3,
Выполняя обратное преобразование Лапласа, получим фундаментальную матрицу системы (4.12):
Уравнение, оценивающее вектор х, имеет вид [5, 16, 22]:
При малом периоде квантования Т вектор x(t) – линейная функция времени, следовательно [16]:

Пренебрегая Т2, решение системы (4.11) запишем [7]:
 (4.13)
(4.13)
Модель объекта наблюдения будет иметь вид [7, 16, 22]:
Найдем коэффициенты k1, k2, k3.
Вычитая уравнения (4.11) из уравнений (4.13), получим [7, 16, 22]:
Запишем характеристическое уравнение для этой системы:
 (4.14)
(4.14)
Пусть для системы
оценки угловой
скорости желательны
равные отрицательные
корни:
 Тогда желаемый
характеристический
полином примет
вид:
Тогда желаемый
характеристический
полином примет
вид:
 (4.15)
(4.15)
Приравнивая коэффициенты при одинаковых степенях S в уравнениях (4.14)и (4.15), получим [7, 16, 22]:
Произведем аналитическое обоснование выбора коэффициентов усиления алгоритма оценки угловой скорости.
Рассмотрим характеристическое уравнение [16, 22]:

Приведем его к нормированному виду. Для этого разделим все члены на К3 и введем новую переменную
Получим

На плоскости параметров А и В построим границу устойчивости. Условия устойчивости имеют вид:
A > 0, B > 0, AB > 1.
Уравнение границы устойчивости имеет вид:
АВ = 1 при A > 0 и B > 0.
Выделим в области устойчивости части, соответствующие различному расположению корней характеристического уравнения [7, 16, 22].
В точке А=В=3 характеристическое уравнение имеет три равных корня q1=q2=q3=1. При этом для исходного уравнения получим:
Построим области апериодических процессов (все три корня вещественные - III) и колебательных процессов (один корень вещественный и два комплексных). Причем во втором случае будем различать область, где пара комплексных корней лежит ближе к мнимой оси, чем вещественный - I, и область, где вещественный корень лежит ближе к мнимой оси, чем пара комплексных - II.
В соответствии с методикой границы указанных областей описываются уравнениями:
- кривые CE, CF:

- кривая CD:

На плоскости К1К2 для фиксированного К3 построим области различного расположения корней внутри каждой части области устойчивости (см. рис. 2.1).
На рис. 4.1 точками A, B, C, D, E показаны значения коэффициентов алгоритма оценки угловой скорости, используемые при моделировании. Численные значения коэффициентов при моделировании выбирались из различных участков (I, II, III) области устойчивости.
Рис. 4.1 - Значения коэффициентов алгоритма оценки угловой скорости
4.3 Алгоритм обработки и контроля информации ГИВУС
Включение ГИВУС производится в режиме ВКЛ.
В режиме ВКЛ после наступления тепловой готовности включаются все шесть ЧЭ ГИВУС. После достижения функциональной готовности (22 мин с момента включения прибора) производится контроль работоспособности ЧЭ и в случае нормы два ЧЭ отключаются. Эти ЧЭ находятся в «горячем» резерве и в случае необходимости могут быть готовы к работе спустя 1 минуту [21].
Задача обработки и контроля информации ГИВУС состоит из следующих алгоритмов [1, 3, 21]:
1. Алгоритм начальной установки задачи ГИВУС.
2. Алгоритм выбора конфигурации включаемых каналов ГИВУС.
3. Алгоритм расчета приращений углов ГИВУС.
4. Алгоритм контроля и формирования признака информативности ГИВУС.
1. Алгоритм начальной установки задачи ГИВУС
Алгоритм рассчитывает матрицу С(6х3) установки шести ЧЭ в приборных осях:
Сi1 = cos(+i);
Ci2 = sin(+i)cos((i-1)+i);
Ci3 = sin(+i)sin((i-1)+i);
где , - углы установки ЧЭ в ПСК;
i, i – погрешности углов установки (і = 16).
Алгоритм также производит обнуление внутренних переменных задачи. По полетному заданию (ПЗ) (параметр IZGIV*) выбирается число включаемых в режиме ЧЭ [21]:
IZGIV*=2 - работа на 5 ЧЭ;
IZGIV*=1 - работа на 4 ЧЭ;
IZGIV*=0 - работа на 3 ЧЭ.
По ПЗ задается признак контроля Zcon:
Zcon = 0 – наличие контроля;
Zcon = 1 – отсутствие контроля.
Алгоритм разовый, работает на первом такте каждого режима.
2. Алгоритм выбора конфигурации включаемых каналов ГИВУС
Алгоритм работает на тех тактах режима, где происходит смена работающего комплекта чувствительных элементов (ЧЭ), функционально при возникновении отказа или по ПЗ [1, 3, 21].
Алгоритм состоит из трех частей, соответствующих трем состояниям признака работы IZGIV*=0V1V2.
При IZGIV*=2 алгоритм формирует пятерку работающих ЧЭ из числа исправных. Из этой пятерки выбирается ортогональная управляющая тройка ЧЭ для формирования матрицы управления В(3х3). Если номера работающих ЧЭ выбираются по ПЗ, то управляющей тройкой считаются первые три из заданных.
При IZGIV*=1 из числа исправных ЧЭ выбираются номера четырех ЧЭ: 3 из них считаются управляющими, а четвертый используется для контроля. Выбор четверки по ПЗ осуществляется аналогично случаю IZGIV*=2.
При IZGIV*=0 выбор работающих измерительных каналов осуществляется аналогично случаю работы на четырех ЧЭ, отличие состоит в том, что контрольный ЧЭ не формируется [21].
Алгоритм ЧЭ формирует запросы на включение ЧЭ IPVG(i)=1 после определения их номеров [21].
В результате формируется управляющая матрица В(3х3), используемая в расчетах проекций приращений углов на приборные оси. Для этого формируется вспомогательная матрица D(3х3), составленная из строк матрицы С(6х3), соответствующих номерам управляющих ЧЭ. Управляющая матрица рассчитывается следующим образом [21]:
B = D-1.
Алгоритм тактированный, работает с тактом То=0,1 с.
3. Алгоритм расчета приращений углов
Алгоритм формирует суммарные признаки функциональной и точностной готовности ГИВУС по признакам, приходящим из подсистемы. Осуществляет выбор диапазона измерений ГИВУС по признаку ППД, формируемому алгоритмами режимов [5 ,21].
Алгоритм формирует
информацию
о приращениях
углов, измеренных
каждым ЧЭ
 :
:
 (i=16),
(i=16),
где mi – цена импульса і-го ЧЭ ГИВУС;
Ni – число импульсов с і-го ЧЭ за такт;
i – паспортизуемый уход і-го ЧЭ.
Рассчитываются приращения углов [5, 7] поворота объекта в проекциях на приборные оси ГИВУС gj :
 ,
,
где Вjk – элементы матрицы управления;
nuprk – номера управляющих ЧЭ ГИВУС (j=13; k=13).
Затем вычисляются проекции приращений углов на оси визирной системы координат (ВСК) j:



где ADj – погрешности установки ПСК ГИВУС относительно ВСК;
yxj – вычисленный на борту угловой уход (j=13).
Алгоритм тактированный, работает с тактом То=0,1 с.
4. Алгоритм контроля ГИВУС
Контроль осуществляется при условии IZCON=0.
Алгоритм рассчитывает приращение угла по контрольной оси и сравнивается с приращением, полученным с контрольного ЧЭ [21]:
k = Cncon,1g1 + Cncon,2g2 + Cncon,3g3
|k -ncon|<p
где ncon – номер контрольного ЧЭ;
p – порог контроля информации.
Если разность не превышает порог p, заданный в ПЗ, то все включенные ЧЭ считаются исправными. В противном случае для идентификации отказавшего ЧЭ алгоритм формирует заявку на подключение пятого ЧЭ. После достижения им точностной готовности происходит идентификация отказавшего ЧЭ следующим образом: из 5 задействованных ЧЭ формируется 5 групп по 4 ЧЭ в каждой. Для каждой группы вычисляется скалярное рассогласование между показаниями этих ЧЭ. При наличии отказов рассогласование превышает порог p и формируется признак ненормы. Поскольку каждый из 5 включенных ЧЭ входит в 4 группы, то при одном