Управление динамической системой
Федеральное
агентство по
образованию
Государственное
образовательное
учреждение
высшего профессионального
образования
Сибирский
государственный
технологический
университет
Факультет
автоматизации
и информационных
технологий
Кафедра
системотехники
Курсовая
работа
Управление
динамической
системой
Задачи
Подобрать
аналитические
выражения для
функций Mg, Mc.
Найти
равновесное
состояние
системы.
Численно
решить систему
уравнений
моментов и
управляющего
устройства
при начальных
условиях и
полученных
выражениях
 ,
,
 .
Решение вести
до установления
значений w
и m. Проверить
совпадение
.
Решение вести
до установления
значений w
и m. Проверить
совпадение
 и
и
 .
Построить
графики.
.
Построить
графики.
Линеаризовать
уравнение
моментов в
окрестности
точки равновесия,
численно рассчитать
линеаризованную
систему. Построить
графики.
Замкнуть
систему. Представить
разомкнутую
систему в
векторно-матричной
форме для
непрерывного
и дискретного
времени. Представить
замкнутую
систему в
векторно-матричной
форме для
непрерывного
и дискретного
времени.
Оценить
управляемость
системы. Составить
характеристическое
уравнение
системы. На
основе критерия
Рауса - Гурвица
определить
значение
коэффициента
k = k0, соответствующее
пределу устойчивости
линеаризованной
системы
Найти
корни характеристического
уравнения
системы и
исследовать
перемещение
корней на
комплексной
плоскости при
варьировании
коэффициента
усиления k.
Построить
траекторию
движения корней.
Построить
переходный
процесс в системе.
Уравнение
решить аналитически,
выполнив
спектральное
разложение
матрицы А и
использовав
собственные
числа и собственные
вектора матрицы
А.
Используя
преобразование
Лапласа, получить
передаточные
функции системы
по каналу u®x1
. На основе
z-преобразования
аналогичным
образом получить
дискретную
передаточную
функцию системы.
Выписать
выражения для
амплитудно-фазовой,
амплитудной,
фазовой, вещественной
и мнимой частотных
характеристик
для системы.
Для значения
a = 0.9 построить
годограф АФЧХ
и графики
характеристик
A(w), j(w),
Re(w), Im(w).
Оценить
устойчивость
системы по
критерию Найквиста
(по АФЧХ системы)
и устойчивость
системы по
критерию Михайлова,
построив для
этой цели годограф
Михайлова.
Определить
запас устойчивости
системы.
Реферат
В
пояснительной
записке содержится
22 листа текстовой
части, 19 рисунков
и 1 источник
данных.
УПРАВЛЕНИЕ,
ДИНАМИЧЕСКИЕ
СИСТЕМЫ, ПЕРЕХОДНЫЙ
ПРОЦЕСС, РАВНОВЕСНОЕ
СОСТОЯНИЕ,
УСТОЙЧИВОСТЬ
СИСТЕМЫ.
Целью
работы является
исследование
поведения
управляемой
динамической
системы, описанной
системой
дифференциальных
уравнений. На
основе исходных
данных находятся
равновесное
состояние
системы, вид
линеаризованной
системы; исследуется
соответствующая
ей замкнутая
система и описывается
переходный
процесс в этой
системе; определяются
частотные
характеристики
системы и
устойчивость.
Содержание
Введение
1.
Исходные данные
2.
Нахождение
аналитического
вида функций
Mc(ω) и
Mg(ω,μ)
3.
Нахождение
равновесного
состояния
системы
4.
Численное
нахождение
функций ω(t)
и μ(t)
равновесного
состояния
5.
Линеаризация
и численное
решение разомкнутой
системы
6.
Замкнутая
система
7.
Оценка управляемости
системы
8.
Оценка устойчивости
системы
9
Построение
переходного
процесса
10.
Нахождение
передаточной
функции для
разомкнутой
системы
11.
Амплитудная,
фазовая, вещественная,
мнимая и амплитудно-фазовая
частотные
характеристики
12.
Оценка устойчивости
системы по
критерию Найквиста,
по критерию
Михайлова
Заключение
Библиографический
список
Введение
Теория
управления
– это наука,
изучающая
процессы в
системах управления
с информационной
точки зрения,
обычно абстрагируясь
от физической
природы объектов
и управляющих
устройств.
Процессы в
автоматических
системах управления
изучает теория
автоматического
управления.
Важнейшие
принципы построения
систем автоматического
управления:
принцип
обратной связи;
принцип
оптимальности;
принцип
адаптивности;
принцип
робастности.
По
степени использования
информации
об объекте
различают
разомкнутые
и замкнутые
системы управления.
При разомкнутом
управлении
воздействие
на объект
осуществляется
по заданной
программе вне
зависимости
от результатов
управления
в предыдущий
период времени.
Замкнутые
системы управления
используют
информацию
о результатах
управления
и формируют
управляющее
воздействие
в зависимости
от того, насколько
достигается
цель управления.
1
Исходные данные
Динамика
объекта управления
описывается
следующей
системой
дифференциальных
уравнений
а)
Уравнение
моментов:
 (1)
(1)
б)
Уравнение
управляющего
устройства:
t
- время, сек; J -
момент инерции
движущихся
частей, приведенный
к валу двигателя,
кг*м / сек2; w
- угловая скорость
двигателя,
1/сек; Mg, Mc - момент
движущих сил
и сил сопротивления,
кг*м; m -
управляющее
воздействие;
u - задающее
воздействие;
 ,
,
 -
параметры
управляющего
устройства
-
параметры
управляющего
устройства
Функции
Mg, Mc заданы
таблицами 1 и
2, численные
значения
коэффициентов
определены
в таблице 3
Таблица
1 – Зависимость
Mg от w и
m
| w |
m |
|
0.0 |
0.2 |
0.4 |
0.6 |
0.8 |
1.0 |
| 0.00 |
53.50 |
55.62 |
57.54 |
59.86 |
61.98 |
64.10 |
| 10.60 |
46.28 |
48.63 |
50.99 |
53.35 |
55.71 |
58.06 |
| 21.20 |
36.48 |
39.08 |
41.67 |
44.27 |
46.86 |
49.46 |
| 31.80 |
24.11 |
26.95 |
29.78 |
32.61 |
35.44 |
38.27 |
| 42.40 |
9.17 |
12.24 |
15.31 |
18.38 |
21.45 |
24.52 |
| 53.00 |
0.00 |
0.00 |
0.00 |
1.58 |
4.89 |
8.19 |
Таблица
2 – Зависимость
Mс от w
| w |
0.00 |
10.60 |
21.20 |
31.80 |
42.40 |
53.00 |
| Мс |
10.70 |
13.50 |
20.22 |
30.84 |
45.37 |
63.82 |
Таблица
3 – Значение
параметров
системы
| J |
m |
R1 |
R2 |
C |
| 0.06 |
10.03 |
19.40 |
1.03 |
1.03 |
Начальные
условия: t = 0; w
= 0; m = 0;
 ;
u = 0.5.(3)
;
u = 0.5.(3)
2
Нахождение
аналитического
вида функций
Mc(ω)
и Mg(ω,μ)
 динамическая
система (1)
динамическая
система (1)
Аналитический
вид функции
момента движущих
сил Mc(ω)
находится
методом наименьших
квадратов:



Аналитический
вид функции
момента движущих
сил Mg(ω,μ)
находится
методом наименьших
квадратов.
Сначала по
столбцам при
различных μ
вычисляется
матрица ABC зависимости
Mg(ω,μ)
от μ.
Первый столбец
матрицы ABC вычисляется
при μ=0
из системы:




Остальные
столбцы заполняются
аналогично
при μ
равном 0, 0.2, 0.4, 0.6, 0.8, 1.
Матрица
ABC выражает
зависимость
функции Mg(ω,μ)
от ω
при различных
μ.
При этом функция
Mg(ω,μ)
имеет вид:

Строки
матрицы выражают
зависимость
слагаемых
(А(μ),
В(μ)
и С(μ))
функции Mg(ω,μ)
от μ,
соответственно
1-ая строка А(μ),
2-ая строка В(μ),
3-я строка С(μ).
А(μ),
В(μ)
и С(μ)
имеют вид:
Коэффициенты
при μ
вычисляются
методом наименьших
квадратов из
матрицы ABC по
строкам. Так
для А(μ)
по первой строке
матрицы ABC из
системы


Аналогично
находим аналитический
вид В(μ)
и С(μ).
Получаем:
3
Нахождение
равновесного
состояния
системы
Найдем
равновесное
состояние
системы при
следующих
условиях
 .
Подставим эти
условия в систему
(1), получим систему
вида:
.
Подставим эти
условия в систему
(1), получим систему
вида:
Решая
систему численно,
получаем равновесное
состояние
системы при
ω0=34.54
и μ0=0.5.
Построим графики
Mc(ω)
и Mg(ω,μ)
при разных μ0.
На рисунке 1
жирными сплошными
линиями отмечены
графики Mc(ω)
и Mg(ω,μ)
при μ0=0.5
Р
исунок
1 – Графики функций
Mc(ω)
и Mg(ω,μ)
4
Численное
нахождение
функций ω(t)
и μ(t)
равновесного
состояния
Для
того чтобы из
системы (1) найти
функции ω(t)
и μ(t),
необходимо
понизить степень
системы, то
есть избавиться
от производных
второго порядка.
Для этого введем
функцию Z(t)= μ'(t),
получим систему
вида:
 (2)
(2)
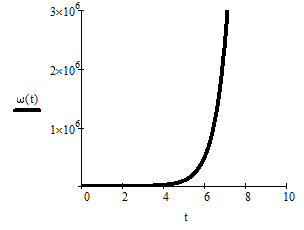
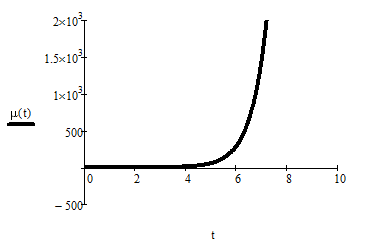
Решая
систему численно,
получаем табличные
значения ω(t)
и μ(t),
по которым
строим графики
ω(t)
(рисунок 2) и μ(t)
(рисунок 3). По
графикам хорошо
видно, что ω(t)
и μ(t)
стремятся к
равновесным
значениям
ω0=31.948
и μ0=0.5,
ω(t)→
31.948, μ(t)
→0.5, что соответствует
вычислениям.
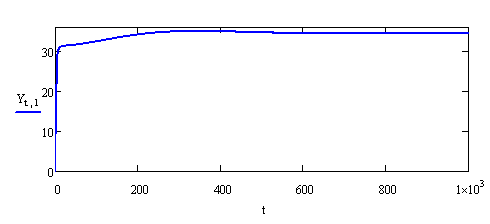
Рисунок
2 – График функции
ω(t)
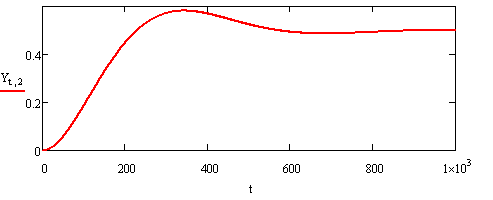
Рисунок
3 – График функции
μ(t)
5
Линеаризация
и численное
решение разомкнутой
системы
Линеаризуем
систему (2) в
окрестности
точки равновесия.
Для этого выведем
систему из
равновесия,
придав u,
μ,
ω
малые приращения
∆u,
∆μ,
∆ω→0.
Соответственно
придается
приращение
Z, ∆Z→0.

 (3)
(3)
Теперь
разложим функции
Mc(ω)
и Mg(ω,μ)
в ряды Тейлора
по формулам:
Пренебрегая
остаточными
членами Og(ω,μ)
и Oc(ω),
получим систему
вида:
Или
 (4)
(4)
Решая
систему численно,
получаем табличные
значения ∆ω(t)
и ∆μ(t),
по которым
строим графики
∆ω(t)
(рисунок 4) и ∆μ(t)
(рисунок 5).
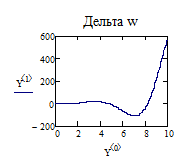
Рисунок
4 – График ∆ω(t)
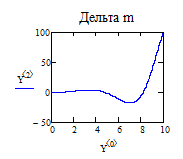
Рисунок
5 – График ∆μ(t)
6
Замкнутая
система
В
векторно-матричной
форме линейную
систему с непрерывным
временем можно
записать в
виде:
 ,
где
,
где



А
=(5)
С
дискретным
временем:
Xk+1
= A∆Xk
+ B∆Uk
, где
Замкнем
систему, положив
 ,
где k – коэффициент
регулятора.
Из соотношений
(3) получим
,
где k – коэффициент
регулятора.
Из соотношений
(3) получим
 ,
и тогда с непрерывным
временем система
примет вид:
,
и тогда с непрерывным
временем система
примет вид:
 ,
где
,
где

 (6)
(6)
С
дискретным
временем
 ,
где
,
где
7
Оценка управляемости
системы
 Составим
матрицу К:
Составим
матрицу К:

Ранг
матрицы K равен
3, что равно
размерности
системы (5), следовательно,
система управляема.
Найдем
коэффициент
k0
регулятора
замкнутой
системы на
границе устойчивости
по критерию
Рауса-Гурвица.
Сначала
составим
характеристическое
уравнение для
системы (6).
 (7)
(7)
Найдем
k по критерию
Рауса-Гурвица.
Определитель
Рауса-Гурвица
составляется
из коэффициентов
характеристического
уравнения и
имеет свойство
 .
где ∆n
и ∆n-1
определители
матрицы, an
свободный член
характеристического
уравнения.
.
где ∆n
и ∆n-1
определители
матрицы, an
свободный член
характеристического
уравнения.
Проверим
∆1,
∆2:
∆1
=
|41.16| = 41.16 >
0
∆2
=

Условие
границы устойчивости,
если хотя бы
один определитель
будет равен
нулю. Пусть
∆n=0,
тогда аn=0.
Получим:
 ,
отсюда k0=0.169.
,
отсюда k0=0.169.
8
Оценка устойчивости
системы
Найдем
корни характеристического
уравнения (7)
λ1,
λ2,
λ3
при различном
Коэффициенте
регулятора
k, k = k0*α
= 0.169* α,
где α=0.6..0.9.
Таблица
4 – Корни характеристического
уравнения
замкнутой
системы
|
α=0.6 |
α=0.7 |
α=0.8 |
α=0.9 |
| λ1 |
-1.13 |
-1.30 |
-1.45 |
-1.59 |
| λ2 |
-2.29 |
-2.47 |
-2.64 |
-2.79 |
| λ3 |
-40.00 |
-39.99 |
-39.97 |
-39.96 |
Построим
графики изменения
λ1,
λ2,
λ3.
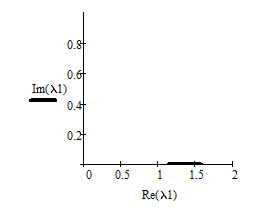
Рисунок
6 – График изменения
λ1
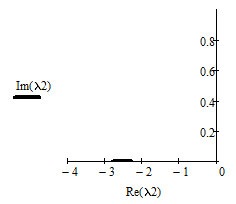
Рисунок
7 – График изменения
λ2
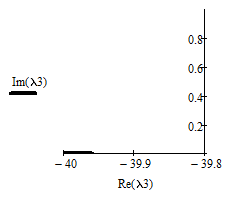
Рисунок
8 – График изменения
λ3
Действительные
части собственных
чисел матрицы
системы всегда
меньше нуля,
следовательно,
система устойчива.
9
Построение
переходного
процесса
Построим
переходный
процесс для
системы (6) с
начальными
условиями t=0,
ω(0)=
1.1ω0,
μ(0)=0,
Z(0)=0 по формуле:
 ,
где
,
где
 ,
,
 -
правые и левые
собственные
вектора системы.
-
правые и левые
собственные
вектора системы.
Собственные
числа:
λ1=
1.59
λ2=
– 2.79
λ3=
–39.96
Матрица
правых собственных
векторов

Матрица
левых собственных
векторов

Получим
переходный
процесс
в
котором
Построим
графики ω(t),
μ(t),
Z(t)
Рисунок
9 - Переходный
процесс ω(t)
Рисунок
10 - Переходный
процесс μ(t)
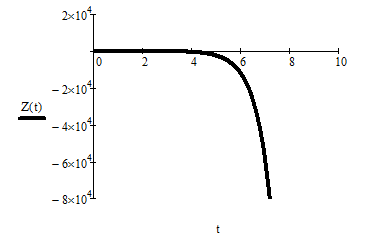
Рисунок
11 - Переходный
процесс Z(t)
10
Нахождение
передаточной
функции для
разомкнутой
системы
Сделаем
преобразование
Лапласа над
разомкнутой
линейной системой,
получим систему
вида:
 ,
или
,
или
Выразим
∆μ
из первого
уравнения:
Выразим
∆ω
через U:
 →
→

получили
выражение вида
 ,
где W(p) есть передаточная
функция комплексной
переменной,
имеющая вид:
,
где W(p) есть передаточная
функция комплексной
переменной,
имеющая вид:
 (8)
(8)
11
Амплитудная,
фазовая, вещественная,
мнимая и амплитудно-фазовая
частотные
характеристики
Подставим
в передаточную
функцию (8) в
качестве комплексного
аргумента iω,
получим:

Умножим
числитель и
знаменатель
правой части
на число сопряженное
знаменателю,
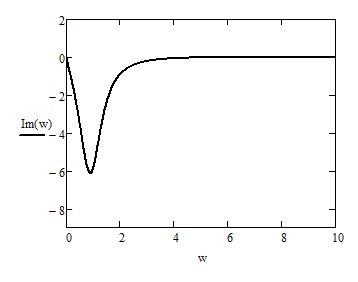
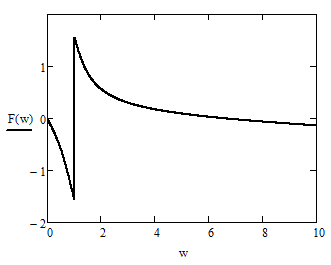
получим и выделим
действительную
и мнимую части
передаточной
функции Re(ω)
и Im(ω):
Построим
графики.
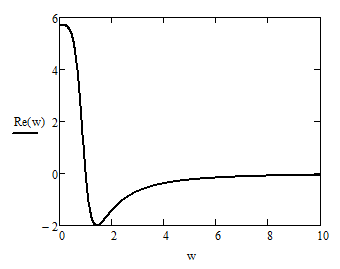
Рисунок
12 - График Re(ω)
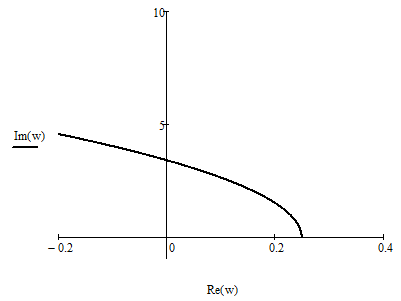
Рисунок
13 - График Im(ω)
Получим
амплитудную,
фазовую и
амплитудно-фазовую
частотные
характеристики
системы. Построим
графики функций:
 -
амплитудная
характеристика
(рис. 14).
-
амплитудная
характеристика
(рис. 14).
 -
фазовая характеристика
(рис. 15).
-
фазовая характеристика
(рис. 15).
Для
АФХЧ отложим
на графике по
вертикальной
оси значения
мнимой части,
а по горизонтальной
действительной
части, при ω=1..100
с шагом 0.001. Рисунок
16.
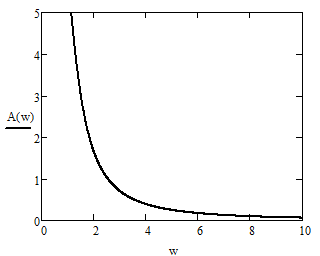
Рисунок
14 - График A(ω)
Рисунок
15 - Графики Ф(ω)
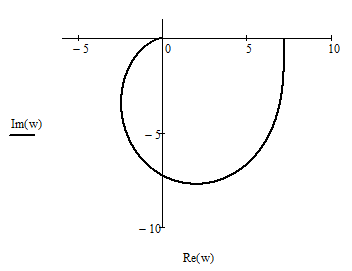
Рисунок
16 - Годограф АФЧХ
Рисунок
17 - Годограф АФЧХ
12
Оценка устойчивости
системы по
критерию Найквиста,
по критерию
Михайлова
Оценим
устойчивость
системы по
критерию Найквиста.
Годограф АФЧХ
не охватывает
точку (-1,0), следовательно,
система устойчива.
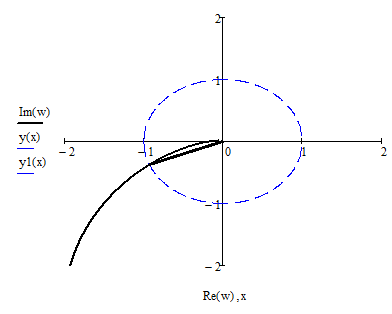
Найдем запасы
устойчивости
системы по фазе
и по амплитуде.
Запас
устойчивости
по фазе – это
угол, на который
нужно повернуть
годограф АФЧХ,
чтобы он охватывал
точку (-1,0).
Из
уравнения
 получаем ω0=2.551.
Вычислим значение
действительной
части при ω0,
Re(ω0)
= -0.926. Тогда запас
устойчивости
по фазе вычисляется
как:
получаем ω0=2.551.
Вычислим значение
действительной
части при ω0,
Re(ω0)
= -0.926. Тогда запас
устойчивости
по фазе вычисляется
как:

Запас
устойчивости
по фазе равен
0.386 радиан.
Запас
устойчивости
системы по
амплитуде –
это расстояние
от точки пересечения
годографа АФЧХ
с осью OX до точки
(-1,0). Из уравнения
 получаем ω0=6.509.
Вычислим
Re(ω0)=-0.143.
Тогда запас
устойчивости
системы по
амплитуде будет
равен 1-0.143=0,857
получаем ω0=6.509.
Вычислим
Re(ω0)=-0.143.
Тогда запас
устойчивости
системы по
амплитуде будет
равен 1-0.143=0,857
Оценим
устойчивость
системы по
критерию Михайлова.
Подставим в
характеристическое
уравнение
разомкнутой
системы iω
вместо λ,
выделим действительную
и мнимую часть.
Построим годограф
Михайлова,
отложив на
графике по
вертикальной
оси значения
мнимой части,
а по горизонтальной
действительной
части, при ω=1..100
с шагом 0.001 (рис.
18).
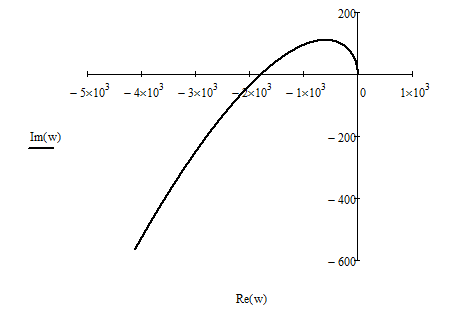
Рисунок
18 - Годограф
Михайлова
Рисунок
19 - Годограф
Михайлова
Годограф
Михайлова
пересекает
последовательно
n квадрантов
(n=3), следовательно,
система устойчива.
Заключение
Результатом
выполнения
курсового
проекта стало
закрепление
знаний по дисциплине
«Основы теории
управления»,
приобретены
практические
навыки для
исследования
поведения
управляемой
динамической
системы, описанной
системой
дифференциальных
уравнений. Были
изучены возможности
математических
программных
пакетов.
Библиографический
список
Советов
Б.Я. Яковлев
С.А. Моделирование
систем: Учеб.
для вузов –
3-е изд. – М.: Высшая
школа, 2001. – 343 с.