Контрольная работа: Реализация схемы автоматизации технического процесса
|
Название: Реализация схемы автоматизации технического процесса Раздел: Рефераты по коммуникации и связи Тип: контрольная работа | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Задание 1 Выбрать по справочной литературе необходимые приборы для реализации информационной цепи (датчик – преобразователь – контрольно-измерительный прибор) и управляющей цепи (регулятор – преобразователь, если необходим, – исполнительный механизм – регулирующий орган). Дать краткое описание приборов и их параметров. Приборы в цепи должны иметь согласованные параметры входные – и выходные сигналы, соответствовать уровню технологического параметра (информационная цепь) и мощности, требуемой для перемещения регулирующего органа в цепи управления. Если мощность выходного сигнала датчика или его преобразователя позволяет, то этот сигнал можно одновременно подать на вход контрольно-измерительного прибора (КИП) и регулятора. В обратном случае для подачи на вход регулятора информации о текущей величине регулируемого параметра необходимо установить отдельный датчик (например, двойную термопару). Обратить внимание на класс точности используемых в информационной цепи приборов и диапазон шкалы контрольно-измерительного прибора. Номинальная величина технологического параметра должна находиться в последней трети диапазона шкалы контрольно-измерительного прибора. Составить: 1. Структурную схему автоматизации. 2. Функциональную схему автоматизации. 3. Спецификацию оборудования. Исходные данные:
Датчик – преобразователь температуры. Преобразователи температуры с пневматическим выходным сигналом 13ТД731. Назначение Предназначен для преобразования в унифицированный пневматический сигнал температуры жидких и газообразных агрессивных сред, в т.ч. в условиях АЭС. 2. Технические характеристики
Регулятор. Приборы контроля пневматические с электрическим приводом диаграммы ПВ10.11. Назначение Приборы контроля работают совместно с пневматическими датчиками и другими устройствами, выдающими унифицированные аналоговые сигналы в пределах 20…100 кПа. ПВ10.1Э – прибор для непрерывной записи и показания величины регулируемого параметра, указания положения контрольной точки и величины давления на исполнительном механизме. 2. Технические характеристики
Исполнительный механизм. Механизм исполнительный пневматический МИП-П1. Назначение Предназначены для перемещения регулирующих и запорно-регулирующих органов в системах автоматического и дистанционного управления. 2. Технические характеристики
Регулирующий орган. Заслонка поворотная. Nemen серия 50001. Назначение Заслонки поворотные используются в качестве запорно-регулирующей трубопроводной арматуры. 2. Технические характеристики
Аппаратура воздухоподготовки. Редуктор давления РДФ-3–11. Назначение РДФ-3–1 – редукторы давления с фильтром, предназначены для регулирования и автоматического поддерживания давления воздуха, необходимого для индивидуального питания пневматических приборов и средств автоматизации, а также очистки его от пыли, масла и влаги. Применяются в машиностроении, нефтяной, сахарной, химической промышленности и других отраслях. ТУ 25.02.1898–75. 2. Технические характеристики
Дано: ωнм = 0,37 (с-1 ) – Наибольшая скорость вращения исполнительного вала; εнм = 1,48 (с-2 ) – Амплитуда ускорения исполнительного вала; Mн с = 61 (Н × м ) – Статистический момент на исполнительном валу; Jн = 36,2 (кг × м2 ) – Момент инерции нагрузки; η = 0,97 – КПД одной ступени редуктора; α = 4 – Допустимый коэффициент перегрузки ДПТ. Требуемая мощность на валу: Ртреб = (2×Jн ×εнм + Мнс ) ×ωнм = (2 × 36,2 × 1,48 + 61) × 0,37 = 62.2162 (Вт ). Т ипоразмер ДПТ с номинальной мощностью: Рном ≥ Ртреб = 175 (Вт ) – двигатель типа СЛ – 521 . Технические данные двигателя постоянного тока серии СЛ типа 569
Рном = 77 (Вт ) – номинальная мощность двигателя; Uня = 110 (В ) – номинальное напряжение якоря; Iня = 1,1 (А ) – номинальный ток якоря; ωня = 314 (c-1 ) – номинальная скорость якоря; Jя = 127×10-6 (кг × м2 ) – момент инерции якоря; rя = 8,5 (Ом ) – сопротивление якоря; d = 10-2 (м ) – диаметр вала двигателя. Номинальный полезный момент двигателя:
Коэффициент противоЭДС обмотки якоря:
Момент потерь на валу двигателя:
Момент с учетом потерь: М S = С ×I ня = 320 × 10-3 × 1,1 = 352,55 × 10-3 (Н × м ). Предварительная оценка передаточного числа редуктора ip : ip 1 £ ip £ ip 2
1,7 · 10-3 · ip 2 – 1,9 · ip + 118,1 = 0. ip 1 »58; ip 2 »1058. Диапазон передаточного числа редуктора: 58£ ip £ 1058 Проверка рассчитанного передаточного числа редуктора по ip max = 1058. А) Выполнение условия по скорости: ip · w нм ≤ (1,1.. 1,2) · ω ня ; ip · w нм = 1058 · 1,4 = 386,4 (с-1 ); 1,1 · ω ня = 1,1 · 377 = 414,7 (с-1 ). 386,4 (с-1 ) ≤ 414,7 (с-1 ) – условие выполняется . В) Выполнение условия по моменту: M НОМ ≤ (3..4) · Mn ; M НОМ = 0,29 + 0,13 + 0,08 = 0,5 (Н·м ); 3 · Mn = 3 · 464,2 · 10-3 = 1,4 (Н·м ). 0,5 (Н·м ) ≤ 1,4 (Н·м ) – условие выполняется . С) Выполнение условия по перегреву: Mt ≤ Mn ;
Mn = 464,2 · 10-3 (Н·м ). 248,8 (Н·м ) ≤ 464,2 (Н·м ) – условие выполняется .
Расчёт редуктора с цилиндрическими колёсами для ip = 200: ip =i 1 ·i 2 ·…·in = 200;
где: Zn – число зубьев n -ой шестерни. Соотношение передаточных чисел ступеней редуктора:
Из расчёта, что: in = 11,2;
ИТОГ – 4 ступени. i1 = 1,88; i2 = 2,39; i3 = 3,98; i4 = 11,2. ip = 1,88 · 2,39 · 3,98 · 11,2 = 200,29 » 200; Расчётчислазубьев: Число зубьев ведущих шестерен: Z 1 = Z 3 = Z 5 = Z 7 ≤ 15 = 15. Число зубьев ведомых шестерен: Z 2 = Z 1 · i 1 = 15 · 1,88 = 28; Z 4 = Z 3 · i 2 = 15 · 2,39 = 36; Z 6 = Z 5 · i 3 = 15 · 3,98 = 60; Z 8 = Z 7 · i 4 = 15 · 11,2 = 168. Расчёт диаметра колёс: Модуль зуба выбирается из стандартного ряда при условии обеспечения прочности зуба по удельному давлению на зуб:
Для стальных цилиндрических прямозубых колёс с эвольвентным профилем:
m ≥ 1,3 = 2,0. Диаметр ведущих шестерен: D 1 = D 3 = D 5 = D 7 = m · Z 1 = 2,0 · 15 = 30 (мм ). Диаметр ведомых шестерен: D 2 = m · Z 2 = 2 · 28 = 56 (мм ); D 4 = m · Z 4 = 2 · 36 = 72 (мм ); D 6 = m · Z 6 = 2 · 60 = 120 (мм ); D 8 = m · Z 8 = 2 · 168 = 336 (мм ). Проверка: A) Меньшего диаметра из колёс, относительно диаметра вала: D 1 ≥ 2d . 30 (мм ) ≥ 20 (мм ) – условие выполняется . B) Передаточного числа пар и всего редуктора:
ip = 1,86 · 2,4 · 4,0 · 11,2 = 199,99 » 200; Передаточное число соответствует заданному. Расчёт приведённого к валу двигателя момента инерции редуктора: Расчёт момента инерции для шестерен по формуле для сплошного цилиндрического колеса:
J 1 = J 3 = J 5 = J 7 = KJ · D 1 4 = 7,752 · (3 · 10-2 )4 = 6,279 · 10-6 (кг·м2 ); J 2 = KJ · D 2 4 = 7,752 · (5,6 · 10-2 )4 = 76,237 · 10-6 (кг·м2 ); J 4 = KJ · D 4 4 = 7,752 · (7,2 · 10-2 )4 = 208,326 · 10-6 (кг·м2 ); J 6 = KJ · D 6 4 = 7,752 · (1,2 · 10-1 )4 = 1,6 · 10-3 (кг·м2 ); J 8 = KJ · D 8 4 = 7,752 · (3,36 · 10-1 )4 = 98,8 · 10-3 (кг·м2 ); Расчёт полного момента инерции:
= 6,279 · 10-6 + 23,851 · 10-6 + 10,769 · 10-6 + 3,495 · 10-6 + 2,47 · 10-6 = = 46,864 · 10-6 (кг·м2 ).
Проверка пригодности двигателя с рассчитанным редуктором. А) Выполнение условия по скорости: ip · w нм ≤ (1,1.. 1,2) · ω ня ; ip · w нм = 200 · 1,4 = 280 (с-1 ); 1,1 · ω ня = 1,1 · 377 = 414,7 (с-1 ). 280 (с-1 ) ≤ 414,7 (с-1 ) – условие выполняется . В) Выполнение условия по моменту: M НОМ.ред ≤ (3..4) · Mn ;
= 288,387 · 10-3 + 182,474 · 10-3 + 81,167 · 10-3 = 0,552 (Н·м ); 3 · Mn = 3 · 464,2 · 10-3 = 1,393 (Н·м ). 0,552 (Н·м ) ≤ 1,393 (Н·м ) – условие выполняется . С) Выполнение условия по перегреву: Mt .ред ≤ Mn ;
276,3 (Н·м ) ≤ 464,2 (Н·м ) – условие выполняется .
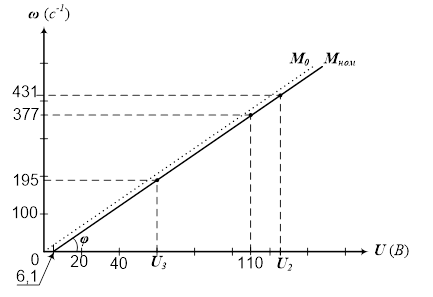
Построение семейств механических и регулировочных характеристик двигателя. Механическая характеристика строится по уравнению механической характеристики ДПТ с независимым возбуждением:
1 точка – скорость холостого хода, при M = 0:
2 точка – рабочая точка, при М = Mn = 464,2 · 10-3 (Н·м ), и ω = ω ня = 377 (с-1 ). 3 точка – пуск двигателя, при ω = 0:
Регулировочная характеристика строится также, по уравнению механической характеристики ДПТ с независимым возбуждением:
1 точка – рабочая точка, при U = U ня = 110 (В ), и ω = ω ня = 377 (с-1 ). 2 точка – трогание двигателя, при U = U Тр , и ω = 0;
Расчёт усилителя мощности. Максимальное напряжение усилителя мощности U max .ум и добавочный резистор Rдоб , ограничивающий ток якоря при пуске:
Umax .ум = =I ня ×R доб + U ня . – (уравнение якорной цепи для номинального режима). α ×I ня × (Rдоб + r я ) ==I ня ×R доб + U ня ;
Umax .ум = =I ня ×R доб + U ня .
Umax .ум = = 2 ×R доб + 110.
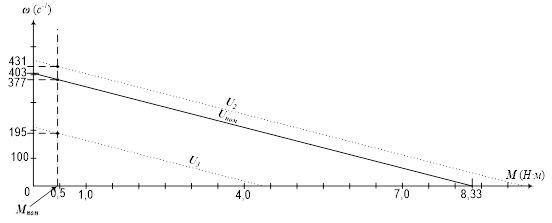
Umax .ум = =137,1 (В ) – максимальное напряжение усилителя мощности. Как следует из уравнения механической характеристики, скорость двигателя, а, следовательно, и его мощность (P = M · ω ), при постоянном моменте нагрузки, можно регулировать изменением напряжения на якоре двигателя. Напряжение на якоре изменяется либо с помощью реостата, либо с помощью усилительно – преобразовательного устройства, при этом поток возбуждения остаётся постоянным. Из уравнений для ДПТ и воспользовавшись графиками характеристик можно рассчитать напряжение на выходе усилительно – преобразовательного устройства в зависимости от требуемой мощности; и мощность в зависимости от напряжения.
ω 2 = (U 2 – U Тр ) · tgφ ;
В итоге:
Используя паспортные данные, получается расчёт усилителя для данного двигателя: U 2 = P 2 · 0,6 + 6,13; P 2 = U 2 · 1,68 – 10,33. Пример: P 2 = 200 Вт ; U 2 = 200 · 0,6 + 6,13 = 126 В ; ω 2 = P 2 / М n = 200 / 0,4642 = 431 с-1 . U 3 = 60 В ; P 3 = 60 · 1,68 – 10,33 = 90 Вт ; ω 2 = P 2 / М n = 90 / 0,4642 = 195 с-1 . Параметры нагрузки для AD
|