Курсовой проект
“
Системы сети передачи данных”
Выполнил: Васяк О.В.
Проверил: Локтикова Т.М.
Житомир 2003
Содержание
Введение
Техническое задание
Разработка структурной схемы
Разработка функциональной схемы
Выбор способа восстановления аналогового сигнала по его отсчётам
Расчёт параметров и выбор типа АЦП
Расчёт параметров помехоустойчивого кода
Расчет вероятностных характеристик. Расчёт вероятности ошибочного приёма кодовой комбинации
Расчёт вероятности правильного приёма кодовой комбинации
Оценка полосы пропускания
Разработка принципиальной схемы
Выводы
Список используемой литературы
Аннотация
В данном курсовом проекте разработан передающий полукомплект кодоимпульсной системы телеизмерения. Разработана структурная, функциональная, электрическая принципиальная схемы полукомплекта. Построена временная диаграмма.
В основе любой технической системы управления и функционирования лежат информационные процессы, связанные с первичным отбором, сбором, предварительной обработкой информации и ее передачи. В тех случаях, когда объекты территориально разобщены или удалены от пункта управления, возникает задача в передаче информации из контролируемого пункта, на котором объекты сосредоточены в одном месте, к пункту управления. Задача, которая решается в данном курсовом проекте применение передающего полукомплекта кодоимпульсной системы телеизмерения для посылки в линию связи сигналов телеизмерения, позволяющих подробно охарактеризовать состояние и изменения состояния объекта и дающие количественную оценку состояния, отвечая на вопрос о значении изменяемого параметра. Параметры телеизмерения получают с помощью первичных преобразователей (датчиков). Увеличение помехоустойчивости передаваемого сигнала обеспечивается помехоустойчивым кодированием. В качестве помехозащищенного кода используется код Хемминга.
Число каналов телеизмерения,  2 2
Характеристики входных сигналов для всех каналов:
полоса частот,  ,
Гц20 ,
Гц20
Диапазон изменения величины входного сигнала:
 ,
В ,
В
Способ уплотнения линии связи: временной
Обратный канал: отсутствует
Основная приведённая погрешность, вносимая АЦП
и восстановлением сигнала по его отсчету, не должна превышать, 0,25
0,25
Требования к помехоустойчивому коду:
Должен обеспечивать исправление всех однократных ошибок: d0
=3
Кодовая комбинация для каждого отсчёта должна содержать: номер датчика, значение измеряемой величины и проверочные символы.
Вид помехоустойчивого кода: Хемминга
Параметры двоичного кода:
вероятность ошибки при приёме кодового символа, р: 1
×10 -2
Показатель группировки ошибок в канале,  :
0,8 :
0,8
В основе любой кодоимпульсной системы лежит принцип передачи импульсно-кодовых сигналов в виде кодовых комбинаций в канал связи. Исходя из этого и анализируя задание, разрабатываем структурную схему всей системы. Сигналы от датчиков передаются на вход системы через аналоговый коммутатор каналов. Следующим функциональным блоком является АЦП, который преобразует поступающий на вход устройства от датчика аналоговый сигнал о состоянии объекта в цифровой код. Необходим также блок выборки и хранения. Этот блок может входить в состав АЦП. Если же этот блок в АЦП отсутствует, то дополнительно перед АЦП ставится устройство выборки и хранения.
Кодовая комбинация на выходе должна содержать код датчика телеизмерений, поэтому в схему вводиться формирователь кода номера датчика (ФКНД). Затем подключается схема кодера.
В данном курсовом проекте разрабатывается код Хемминга. Для управления кодером и схемой в схему входит устройство управления (УУ). За кодером следует линейный блок (ЛБ). С линии связи сигнал поступает на декодер через ЛБ. После декодирования информации наш сигнал поступает к пульту управления (ПУ).
Структурная схема устройства приведена в приложении 1.
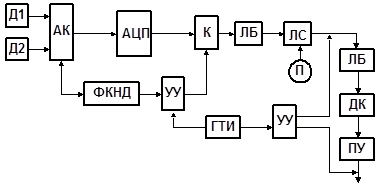
Работа схемы состоит в следующем: аналоговый сигнал усиливается в усилителе (УС), устройство управления (УУ) посредством ФКНД поочередно подключает данные датчиков через коммутатор каналов (КК) к АЦП, который вырабатывает код измеряемого напряжения в параллельный двоичный код. В кодере двоичный код преобразуется в помехозащищенный код Хемминга, который поступает в ЛБ. Затем информация поступает в линию связи, в которой на наш сигнал действуют помехи. После, для того чтоб подать наш сигнал на ПУ я его декодирую в кодере Хемминга.
В приложении 2 собрана функциональная схема передающего полукомплекта кодоимпульсной системы. Сигналы от датчиков коммутируются мультиплексором. Он должен содержать не меньше 2 аналоговых входов и 1 входа управления (log2
2=1). Последовательный сигнал от датчиков следится счётчиком СТ2. Потом аналоговый сигнал поступает на АЦП. Цифровой сигнал с АЦП поступает на кодер состоящий из элементов по мод.2, которые генерируют проверочные символы и регистра, который преобразует параллельный код в последовательный. Схема управления собрана на одном счётчике, дешифраторе и триггере. С прямого выхода триггера сигнал поступает на вход управления регистра и вход "запуск АЦП". А с 15 выхода дешифратора сигнал подаётся на вход обнуления счётчика СТ1 и на вход С счётчика СТ2. За Д1 и Д2 отвечает сигнал 0 и 1 с выхода нулевого разряда СТ2. Когда на выходе СТ2 появиться 102
, этот сигнал подаётся на элемент И, который обнуляет счётчик СТ2.
Способ восстановления сигнала по отсчётам определяет погрешность дискретизации .
Восстановление сигнала выполняется с помощью вычислителей, использующих один из методов интерполяции. .
Восстановление сигнала выполняется с помощью вычислителей, использующих один из методов интерполяции.
При реализации полиномиальной интерполяции различают ступенчатую, линейную, квадратичную или соответственно интерполяцию нулевого, первого и второго порядка.
Так как допустимая основная приведенная погрешность достаточно велика, то нет необходимости использовать интерполяционный полином высокого порядка. Достаточно будет выбрать линейную интерполяцию.
По условию технического задания основная приведенная погрешность ,
вносимая АЦП с восстановлением аналогового сигнала по цифровому не должна превышать 0,25%, она определяется по формуле: ,
вносимая АЦП с восстановлением аналогового сигнала по цифровому не должна превышать 0,25%, она определяется по формуле:
 (7.1) (7.1)
где,  - погрешность из-за неидеального восстановления непрерывного сигнала по отсчетам (погрешность дискретизации); - погрешность из-за неидеального восстановления непрерывного сигнала по отсчетам (погрешность дискретизации);  - погрешность из-за конечного времени выборки сигналов; - погрешность из-за конечного времени выборки сигналов;  -
погрешность вызванная квантованием сигналов; -
погрешность вызванная квантованием сигналов;
 - инструментальная погрешность, вызванная разбросом параметров элементов, неточностью питающих напряжений, наводками и т.д. Погрешность дискретизации для сигналов у которых
для сигналов у которых спектральная плотность близка к прямоугольной и ограничена частотойFmax
, связана с периодом дискретизации следующим образом: а) при ступенчатой интерполяции - инструментальная погрешность, вызванная разбросом параметров элементов, неточностью питающих напряжений, наводками и т.д. Погрешность дискретизации для сигналов у которых
для сигналов у которых спектральная плотность близка к прямоугольной и ограничена частотойFmax
, связана с периодом дискретизации следующим образом: а) при ступенчатой интерполяции  (
7.2),
б) при линейной интерполяции (
7.2),
б) при линейной интерполяции (
7.3),
в) при квадратичной интерполяции (
7.3),
в) при квадратичной интерполяции (
7.4).
Результирующая погрешность распределяется поровну по всем составляющим: (
7.4).
Результирующая погрешность распределяется поровну по всем составляющим:

Будем полагать, что АЦП должен поочередно преобразовать отсчет от первого до второго датчика. Определим период дискретизации:

Поскольку период дискретизации АЦП выполняет 2 преобразования, то его время преобразования:
 (
7.5) (
7.5)
Максимальная скорость изменения сигнала будет для составляющей с частотой  и амплитудой (
и амплитудой ( ) /2.
Здесь ) /2.
Здесь и Umin
верхняя и нижняя границы значений сигнала. При этих условиях
и Umin
верхняя и нижняя границы значений сигнала. При этих условиях в%
определяется:
в%
определяется:
 , (
7.6) , (
7.6)
Откуда определяем время выборки:
 (
7.7) (
7.7)
Таким образом, период АЦП или в его составе должно быть устройство выборки и запоминания, время которого не превышало бы 0,134 мкс, при отсутствии такого устройства время преобразования АЦП не должно быть более 0,4225 мс. Число разрядов АЦП находим по формуле:
 (
7.8) (
7.8)
При заданных приделах изменения входного сигнала шаг квантования АЦП:
 (
7.9) (
7.9)
Приведенные выше расчеты позволяют осуществить выбор АЦП. При выборе учитывается, что приведенная инструментальная ошибка не должна превышать 0,0625%.
Учитывая все выше изложенное, выбираем АЦП типаAD7812
.
Она представляет собой10-
разрядный аналогово-цифровой преобразователь,8-ми канальный, время преобразования которого 2,3мкс,выполненный по КМОП - технологии. АЦП работает с однополярным питание от 2.7 до 5.5 В. Входное аналоговое напряжение должно иметь уровень от 0 до VDD
, где VDD
напряжение питания. В нашем случае необходимо взять +5В. Так как АЦП выполнено по КМОП технологии, то нам нет необходимости применять преобразователи уровня, а наличие встроенного коммутатора на 8 каналов позволят нам не применят отдельно коммутатор каналов.
По условию задания у меня вид помехоустойчивого кода - код Хемминга. Код должен обеспечивать исправление всех однократных ошибок, кодовая комбинация должна содержать номер датчика, значение измеряемой величины и проверочные символы.
 (
8.1) (
8.1)
В свою очередь, (
8.2) (
8.2)
Где  -
количество разрядов АЦП, необходимых для преобразования аналогового сигнала датчика в цифровой; -
количество разрядов АЦП, необходимых для преобразования аналогового сигнала датчика в цифровой;
 -
количество разрядов, необходимых для выбора одного из двух каналов. Тогда согласно выражению (8.2) -
количество разрядов, необходимых для выбора одного из двух каналов. Тогда согласно выражению (8.2)  .
Из выражения (8.1) находим .
Из выражения (8.1) находим ( ( ).
Для и ).
Для и  строим проверочную матрицу:
строим проверочную матрицу:

По проверочной матрице записываю проверочные уравнения:
 (8.3)
(8.3)
Из проверочных уравнений записываю выражения для проверочных символов:

Полученные выражения для проверочных символов дают алгоритм кодирования. Таким образов кодирование кодом Хемминга можно получить с помощью сумматоров по модулю 2.
Во многих реальных двоичных каналах наблюдается явление группирования ошибок, которое выражается в резком увеличении вероятности трансформации символов на небольших интервалах времени. В промежутках между ними ошибки появляются редко.
Существуют различные модели таких каналов с памятью. Наиболее простая их них и в тоже время наиболее эффективная описывается двумя параметрами: средней вероятностью р
искажения двоичного символа ипоказателем группирования ошибок. Вероятность
группирования ошибок. Вероятность появления в кодовой комбинации из n символов m или более ошибок определяется выражением:
появления в кодовой комбинации из n символов m или более ошибок определяется выражением:
 (
9.1) (
9.1)
Расчёт вероятности правильного приёма кодовой комбинации производиться в соответствии с формулой (9.2):
 (
9.2) (
9.2)
Длительность кодовой посылки определяется по формуле:
 ; (
10.1) ; (
10.1)
где  -
интервал дискретизации, -
интервал дискретизации,
 -
длина кодовой комбинации, -
длина кодовой комбинации,
-
количество каналов телеизмерения.
Получим

Ширина полосы пропускания:
 (
10.2) (
10.2)
где  -
коэффициент воспроизведения импульса ( -
коэффициент воспроизведения импульса ( ),
возьму ),
возьму

Можно сделать вывод о том, что полоса пропускания линии связи составляет не более 37,88 кГц.
За основу взята серия К564 с КМОП
логикой из следующих соображений: эти устройства обладают высокой помехоустойчивостью, устраивающим нас быстродействием, высокой надежностью, большим диапазоном рабочих температур, низким энергопотреблением.
Применим многоканальный АЦП, благодаря чему блок коммутации будет входить в состав АЦП.
В качестве регистра RG1
используется универсальный регистр К564ИР6
. Для записи, преобразования с параллельного в последовательный код18-ти разрядного кода берем три микросхемыК564ИР6
и соединяем их следующим образом: восемь разрядов подаем на 1-й регистр, и восемь подаем на 2-й регистр, а оставшиеся 2 разряда подаем на третий регистр.
Последовательный код снимаем счетвёртого выхода третьего регистра.
Для построения схемы управления мультиплексором и самой схемой необходимо два четырёхразрядных счётчика. Для этой цели выбираем микросхему К564ИЕ10,
в одном корпусе которой находятся двачетырёхразрядных двоичных счётчика. Также в схему управления нужен пятнадцатиразрядный дешифратор. Выбираю схему К564ИД4
, представляющая собой восьмиразрядный дешифратор. Мне необходимо две такие микросхемы и один инвертор (для выбора дешифратора).
Для организации коэффициента перерасчёта второго счётчика равного 2 необходим элемент "И". Такой элемент реализован на микросхеме К564ЛА7
. Так как его выходы инверсные, то мне ещё понадобиться инвертор.
В качестве элементов, которые генерируют проверочные символы в кодере, выбираю микросхему К564ЛП2.
В качестве RS - триггера беру микросхему К564ТМ2
, у которой не используются входа в и С.
В результате выполнения курсового проекта был разработан передающий полукомплект кодоимпульсной системы телеизмерений.
Разработанный полукомплект полностью отвечает всем требованиям технического задания.
Система разработана с использованием серийно выпускаемых ИМС КМОП - технологии.
Разработанный полукомплект кодоимпульсной системы телеизмерений можно применить в системах телемеханики, где необходимо передавать значения напряжения, которое снимается с датчиков в пределах от 0 до +5 вольт в линию связи.
Система использует помехозащищенное кодирование с использованием кода Хемминга, что гарантирует большую вероятность приема достоверной информации на приемной стороне.
1.
Тутевич В.Н. Телемеханика. - М.: Высш. школа, 1985. - 423 с.
2.
Пшеничников А.М., Портнов М.Л. Телемеханические системы на интегральных микросхемах. - М.: Энергия, 1977. - 296 с.
3.
Интегральные микросхемы.: Справочник/ под ред. Б.В. Тарабрина. - М.: Радио и связь, 1984. - 528 с.
4.
Проектирование дискретных устройств на интегральных схемах. Мальцев П.П. и др. - М.; Радио и связь. Справочник. 1990.
5.
Б.Г. Федорков, В.А. Телец. Микросхемы ЦАП и АЦП: функционирование, параметры, применение. - М.; Энергоатомиздат, 1990.
Приложение
Временные диаграммы в характерных точках принципиальной схемы


|