КУРСОВАЯ РАБОТА
Моделирование полотна АФАР моноимпульсной БРЛС
Содержание
Введение
1. Характеристики и параметры моноимпульсной БРЛС и её антенной системы
2. Моделирование полотна АФАР
3. Анализ результатов моделирования
Заключение
Используемая литература
Введение
Данная работа направлена на моделирование полотна активной фазированной антенной решетки (АФАР) и оценки параметров её работы в составе бортовой радиолокационной станции.
Фазированные антенные решетки являются наиболее эффективными и перспективными антенными системами, которые позволяют осуществлять быстрый обзор пространства, многофункциональный режим работы, комплексирование радиосредств, адаптацию к конкретной радиообстановке, предварительную обработку сверхвысокочастотных сигналов, обеспечение электромагнитной совместимости.
Применение АФАР для построения сканирующих остронаправленных антенн позволяет реализовать высокую скорость обзора пространства и способствует увеличению объёма информации о распределении источников излучения или отражения электромагнитных волн в окружающем пространстве, что является весомым фактором при современном уровне развития авиационного РЭО.
Дальнейшее улучшение характеристик систем с АФАР можно обеспечить, совершенствуя методы обработки сигналов, излучаемых и принимаемых антенной. Антенные системы в скорм будущем должны решать задачи получения внекоординатной информации о цели, т.е. кроме дальности и угловых координат объекта обеспечивать получение информации о его массе, размерах, параметрах движения и осуществлять распознавание образов.
Таким образом характеристики антенны предопределяют ряд основных характеристик бортовых радиоэлектронных комплексов и систем, так как разрешающая способность и точность определения угловых координат, скорость перемещения луча в пространстве, помехозашищенность, сектор обзора и т.д. зависят от характеристик антенной системы.
Характеристики и параметры моноимпульсной БРЛС и её антенной системы
Радиолокацией называется совокупность методов и технических средств, предназначенных для обнаружения различных объектов в пространстве, измерения их координат и параметров движения посредством приема и анализа электромагнитных волн, излучаемых или переизлучаемых объектами.
Радиолокация как научно-техническое направление в радиотехнике зародилось 30-х годах. Достижения авиационной техники обусловили необходимость разработки новых средств обнаружения самолетов, обладающих высокими характеристиками (дальностью, точностью). Такими средствами оказались радиолокационные системы.
Выдающийся вклад в развитие радиолокации внесли русские ученые и инженеры П.К. Ощепков, М.М. Лобанов, Ю.К. Коровин, Б.К. Шембель. В советском союзе первые успешные эксперименты обнаружения самолетов с помощью радиолокационных устройств были проведены еще в 1934/36 гг. В 1939 г. на вооружение войск ПВО поступили первые серийные отечественные радиолокаторы. Существенным шагом в развитии радиолокации было создание в 1940/41 гг. под руководством Ю.Б. Кобзарева импульсного радиолокатора. В настоящее время радиолокация одна из наиболее прогрессирующих областей радиотехники.
Получение информации в радиолокации сопряжено с наблюдением некоторой области пространства. Технические средства, с помощью которых ведется радиолокационное наблюдение, называются радиолокационными станциями (РЛС), а наблюдаемые объекты – радиолокационными целями. Типичными целями являются самолеты, ракеты, корабли, наземные инженерные сооружения.
Радиолокационные системы имеют следующие преимущества перед визуальными: работа РЛС не зависит от наличия оптической видимости и эффективна не только в дневные, но и в ночные часы, в тумане, при дожде и снегопаде. Они обеспечивают большую дальность действия и точность измерения координат цели.
Решающую роль при проектировании и эксплуатации бортовых авиационных РЛС имеют их технические характеристики, и характеристики их антенных систем.
Каждая бортовая РЛС военного назначения обладает двумя видами характеристик: тактическими и техническими.
Тактические характеристики бортовых РЛС представляют совокупность параметров, определяющих возможности их использования для решения поставленных перед самолетом задач. Эти характеристики задаются на этапе начала проектирования РЛС при всестороннем учете условий и особенностей решаемой задачи, требуемых вероятностей их выполнения, экономических, эксплуатационных и других факторов на основе методов системотехники.
Технические характеристики РЛС определяются теми инженерными решениями, которые принимаются при разработке РЛС в обеспечении тактических требований.
К тактическим характеристикам РЛС обзора земной поверхности относят:
1. Назначение и место установки РЛС: РЛС бомбометания, РЛС разведки, РЛС бокового обзора, РЛС обзора и облета препятствий, многофункциональные РЛС и т.д.
2. Зона обзора определяется как область земной поверхности, где требуется решение тактических задач с заданными характеристиками. Параметрами зоны обзора являются:
- дальность обзора, т.е. удаление зоны обзора от РСА;
- углы наблюдения, т.е. положение зоны обзора относительно вектора путевой скорости носителя РСА;
- полоса одновременного обзора по дальности;
- полоса обзора по азимуту;
- время обзора.
Максимальную дальность обнаружения Дm
ах
объектов с определенными ЭПО (удельными ЭПО) и заданными вероятностями правильного обнаружения. При обнаружении наземных объектов и боевой техники на входе РЛС действуют внутренние шумы приемника и отражения от фона местности. Для обнаружения целей с заданными характеристиками необходимо, чтобы отраженный от целей сигнал в заданное число раз превышал уровень фона местности, а фон местности должен превышать уровень внутреннего шума приемника.
Дальность обзора ударных авиационных комплексов обычно составляет 80...160 км
Угол наблюдения для разведывательных систем задается близкий к боковому, а для ударных – любой.
Время обзора зоны. Это время, в течение которого луч антенны РЛС производит однократный обзор заданной зоны. Наиболее жёсткие требования к времени обзора заданной зоны предъявляют РЛС обхода-облёта препятствий и РЛС ударных самолётов.
3. Разрешающая способность РЛС
Разрешающая способность РЛС определяет качество радиолокационного изображения при картографировании. Кроме того, разрешающая способность в значительной степени определяет эффективность решения задач обнаружения малоразмерных целей, распознавания групповых и сосредоточенных целей, а также определения их координат и сопровождения.
Количественной мерой разрешающей способности является ширина изображения точечной цели на определенном уровне, обычно на уровне - 3 дБ от максимума, что соответствует уровню 0,5 по интенсивности изображения. Для устранения влияния искажений формы изображения вследствие ограничения сигнала, уровень сигнала выбирается таким образом, чтобы изображение находилось в линейной части амплитудной характеристики выходного устройства (процессора, индикатора).
В качестве точечной цели обычно используются уголковые отражатели, расположенные на слабоотражающем фоне для исключения влияния фона и соседних объектов. Группа отдельно расположенных отражателей, имеющих ЭПР с различием 5 дБ друг от друга, позволяет использовать их изображение для оценки линейности тракта.
4. Точность измерения координат. Она задается допустимыми ошибками (погрешностями) оценки координат и параметров взаимного движения. Величина ошибок измерения определяется назначением РЛС. В РЛС бомбометания измеряются азимут цели и дальность до нее с очень высокой точностью. В РЛС бокового обзора, предназначенной для ведения воздушной разведки, точности измерения несколько ниже.
5. Помехозащищенность
Возможность работы РЛС в условиях радиоэлектронной борьбы характеризуется скрытностью работы и помехоустойчивостью. Скрытность работы РЛС задается максимальной дальностью, на которой противник может обнаружить сигналы РЛС и определить их параметры.
Помехоустойчивость определяет работоспособность РЛС в конкретной помеховой обстановке, которая задается в виде набора методов и средств РЭБ.
К тактическим характеристикам относят также надежность, массу, габариты, ремонтопригодность и т.п.
Технические характеристики бортовых РЛС определяются теми инженерными решениями, которые принимаются при разработке РЛС в обеспечении тактических требований.
Основными техническими характеристиками РЛС обзора земли являются:
- длина волны, длительность зондирующего сигнала и вид внутриимпульсной модуляции;
- период повторения импульсов, средняя (импульсная) мощность передатчика РЛС;
- метод обзора пространства и форма ДНА;
- коэффициент шума и полоса пропускания приемника, время когерентного и некогерентного накопления сигнала;
- объем памяти, разрядность АЦП и быстродействие системы цифровой обработки;
- методы измерения координат, алгоритмы помехозащиты и тип устройства отображения.
Технические решения, принимаемые в процессе проектирования РЛС, обеспечивают выполнение тактических требований. Поэтому между техническими и тактическими характеристиками существует тесная взаимосвязь.
Обоснование, выбор и расчет технических характеристик по заданной совокупности тактических требований - сложная научно-техническая задача в силу многозначности функциональных связей и влияния статистических факторов.
При обосновании и выборе технических параметров РЛС выявляются противоречия, разрешить которые возможно путем компромиссов или поиском принципиально новых технических решений.
В классической бортовой радиолокационной станции, выполненной на традиционной антенной системе с параболическим рефлектором, сигнал передатчика через переключатель прием-передача поступает на облучатель антенны. Зеркало антенны через систему приводов механически соединено с фюзеляжем или корпусом летательного аппарата. Для стабилизации положения оси антенны при колебаниях корпуса летательного аппарата на двигатели приводов подаются специальные сигналы с системы стабилизации антенны.
Сигналы обеспечивают разворот антенны в сторону, противоположную колебаниям фюзеляжа, удерживая луч антенны неподвижно по отношению к направлению на цель.
Для создания диаграммы направленности определенной ширины зеркало антенны необходимо изготавливать с высокой точностью.
Кроме того, зеркало должно иметь достаточно высокую механическую прочность, чтобы сохранять постоянство формы поверхности при движении антенны и перегрузках во время маневра летательного аппарата.
Поворот оси диаграммы направленности в классической бортовой РЛС осуществляется механическим поворотом всего зеркала антенны.
Инженерный облик бортовой РЛС коренным образом меняется, если в качестве антенны использовать плоскую активную фазированную решетку (АФАР).В этом случае большая часть устройств, входящих в состав РЛС, размещается с одной стороны такой АФАР
Для формирования синфазного поля в раскрыве АФАР необходимо синфазно управлять отдельными усилителями, каждый из которых работает на свой излучатель. Такую возможность обеспечивает схема разводки, которую можно размещать как на обратной, так и на передней стороне АФАР. Поворот диаграммы направленности на определенный угол, а также стабилизация луча в пространстве производится не путем поворота всей антенны, а изменением фазового распределения в раскрыве АФАР с помощью фазовращателей.
Целью данной работы является моделирование полотна АФАРмоноимпульсной бортовой РЛС.
6. Моделирование полотна АФАР
1.Условия поставленной задачи.
Задачей работы является моделирование полотна АФАР авиационной бортовой РЛС со следующими параметрами:
- Длина волны БРЛС: …….………..λ=3 см.
- Диаметр антенны:…………………D=70 см.
- Расстояние между излучателями:..d=0,6λ
- Тип излучателя: открытый конец круглого волновода.
2.Расчет множителя АФАР
Из условия задачи, максимальное количество излучателей по горизонтальной (М) и вертикальной (N) осям АФАР равно:
M=21
N=21
Множитель АФАР в горизонтальной плоскости представляется в виде:

График множителя АФАР в горизонтальной плоскости представлен на рисунке 1 (а,б):

Рисунок 1 а

Рисунок 1 б
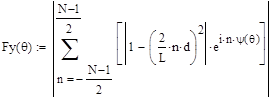
Множитель АФАР в вертикальной плоскости представляется в виде:

График множителя АФАР в горизонтальной плоскости представлен на рисунке 2(а,б):
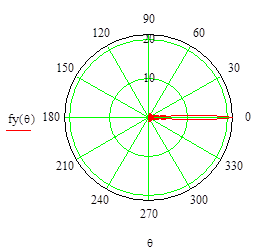
Рисунок 2 а

Рисунок 2,б
3.Расчет амплитудного распределения АФАР
Амплитудное распределение по раскрыву решетки – равномерное, и представлено в виде:
-в горизонтальной плоскости:
График амплитудного распределения в горизонтальной плоскости представлен на рисунке 3:

Рисунок 3
в вертикальной плоскости:
График амплитудного распределения в горизонтальной плоскости представлен на рисунке 4:

Рисунок 4
Общее амплитудное распределение антенны представлено на рисунке 5:
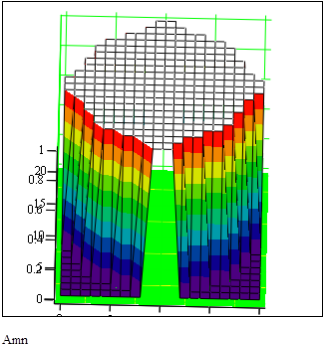
Рисунок 5
Размещение излучателей в плоскости АФАР представлено на рисунке 6
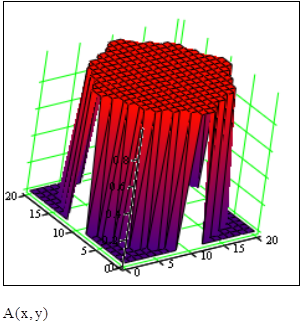
Рисунок 6
4.Рассчет диаграммы направленности АФАР.
Диаграмма направленности в горизонтальной и вертикальной плоскости представлена в виде:
-в горизонтальной плоскости:
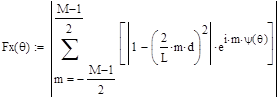
График диаграммы направленности в горизонтальной плоскости представлен на рисунке 7

Рисунок 7
Параметры диаграммы направленности представлены в таблице 1
Таблица 1
| Параметры диаграммы направленности |
| 2 Θ 0.5 (град.) |
2 Θ 0 (град.) |
УБЛ 1 (дб) |
УБЛ 6 (дб) |
| 6 |
10 |
-16 |
-27 |
-в вертикальной плоскости:
Параметры диаграммы направленности представлены в таблице 2
Таблица 2
| Параметры диаграммы направленности |
| 2 Θ 0.5 (град.) |
2 Θ 0 (град.) |
УБЛ 1 (дб) |
УБЛ 6 (дб) |
| 6 |
10 |
-15 |
-27 |
Общая диаграмма направленности АФАР представляется в виде:
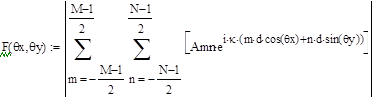
График общей диаграммы направленности АФАР представлен на рисунке 9:

рисунок 9
Параметры диаграммы направленности представлены в таблице 3
Таблица 3
| Параметры диаграммы направленности |
| 2 Θ 0.5 (град.) |
2 Θ 0 (град.) |
УБЛ 1 (дб) |
УБЛ 6 (дб) |
| 6 |
10 |
-15 |
-27 |
Анализ результатов моделирования
В результате моделирования получена математическая модель АФАР бортовой РЛС.
Необходимо проанализировать её параметры при сканировании пространства.
1.При Θ=0 диаграмма направленности имеет вид отображенный на рисунке 9
При Θ=30 градусов диаграмма направленности имеет вид отображенный на рисунке 10
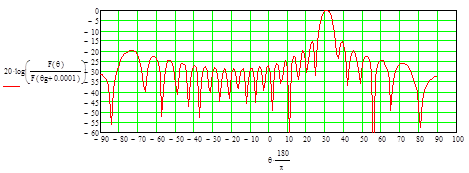
Рисунок 10
Параметры диаграммы направленности представлены в таблице 4
Таблица 4
| Параметры диаграммы направленности |
| 2 Θ 0.5 (град.) |
2 Θ 0 (град.) |
УБЛ 1 (дб) |
УБЛ 6 (дб) |
| 6 |
12 |
-15 |
-27 |
При Θ=45 градусов диаграмма направленности имеет вид отображенный на рисунке 11

Рисунок 11
Параметры диаграммы направленности представлены в таблице 5
Таблица 5
| Параметры диаграммы направленности |
| 2 Θ 0.5 (град.) |
2 Θ 0 (град.) |
УБЛ 1 (дб) |
УБЛ 6 (дб) |
| 8 |
15 |
-15 |
-27 |
При Θ=90 градусов диаграмма направленности имеет вид отображенный на рисунке 12

Рисунок 12
Параметры диаграммы направленности представлены в таблице 6
Таблица 6
| Параметры диаграммы направленности |
| 2 Θ 0.5 (град.) |
2 Θ 0 (град.) |
УБЛ 1 (дб) |
УБЛ 6 (дб) |
| 10 |
20 |
-15 |
-27 |
Видно что при больших углах отклонения главного лепестка диаграммы направленности АФАР наблюдается расширение главного лепестка диаграммы направленности АФАР и выброс интерференционных максимумов излучения и следовательно присутствует неоднозначность при определении параметров цели, но эти недостатки необходимо компенсировать путем цифровой обработки принимаемой информации о цели.
Заключение
В процессе выполнения работы по моделированию АФАР авиационной бортовой РЛС видно, что АФАР является более эффективной антенной системой, по сравнению с зеркальной антенной, позволяющей осуществлять быстрый обзор пространства, путем электронного сканирования, разрешение АФАР по угловым координатам превышает аналогичные зеркальные антенны. При этом существенно уменьшается масса и габаритные размеры бортовой РЛС, повышается надежность работы РЛС по причине отсутствия большого количества механических деталей и механизмов.
В заключение можно сказать, что бортовые РЛС с АФАР намного превосходят аналогичные РЛС с зеркальными антеннами с механическим сканированием пространства. РЛС с АФАР на один-два порядка меньше объема РЛС с зеркальной антенной. В конструкции АФАР можно размещать очень большое число маломощных генераторов. В результате при больших значениях суммарной излучаемой мощности существенно снижается вероятность пробоя воздуха, и так же снижается потребление энергии РЛС, что не маловажно в условиях ограниченности энергоресурсов летательного аппарата.
Используемая литература
1. Д.И. Воскресенский Проектирование фазированных антенных решеток.
2. И.Н. Корбанский Антенны.
3. М.А. Еськин Курсовое и дипломное пректирование по профилю факультета авиационного радиоэлектронного оборудования.
4. В.А. Конуркин Оформление текстовых документов.
|