Государственное образовательное учреждение
высшего профессионального образования
«Московский государственный технический университет
имени Н.Э. Баумана»
Калужский филиал
Факультет электроники, информатики и управления
Кафедра "Системы автоматического управления и электротехника" (ЭИУ3-КФ)
Решение обратной задачи динамики
Расчётно-пояснительная записка к курсовой работе
по курсу «ТиСУ»
Выполнил: Продувнов Д.В.
Группа: САУ-91
Руководитель: доцент, к.т.н.
Акименко Д.А.
Калуга 2008
Содержание
Введение
1. Основные направления развития концепций обратных задач динамики
2. Обратные задачи динамики в теории автоматического управления
3. Применение спектрального метода для решения обратных задач динамики
4. Практическая часть
5. Результаты расчёта
Приложения
Введение
Предлагаемая работа посвящена разработке на основе концепций обратных задач динамики математических методов и построенных на их основе алгоритмов синтеза законов управления и определения параметров настройки САУ из условия реализации на выходе системы законов максимально приближенных в известном смысле к эталонным. Основными в этих методах являются понятия спектральных характеристик функций и систем, под которыми понимаются совокупности коэффициентов Фурье процесса относительно выбранного ортонормированного базиса
1. Основные направления развития концепций обратных задач динамики
Динамика как раздел науки о движении рассматривает следующие задачи:
– по заданным силам, действующим на систему, определить закон движения (траекторию) этой системы;
– по заданному закону движения системы определить силы, под действием которых это движение происходит.
Эти задачи являются в определенном смысле противоположными по своему содержанию. Поэтому их именуют прямой и обратной задачами.
Хотя обратные задачи динамики имеют давнюю и богатую историю, в настоящее время можно встретить их различное толкование и понимание. Наиболее обобщенное определение понятия обратных задач динамики следующее. Обратными задачами динамики называются задачи об определении активных сил, действующих на механическую систему, параметров механической системы и связей, наложенных на систему, при которых движение с заданными свойствами является одним из возможных движений рассматриваемой механической системы.. Здесь под обратными задачами динамики понимаются задачи об определении законов управления движением динамических систем и их параметров из условия осуществления движения по назначенной траектории.
На протяжении длительного времени первая задача являлась основной. В средние века предметом исследований классической механики оказалось, в основном, установление свойств движения заданной механической системы под действием полностью известных сил, т.е. решались так называемые детерминированные прямые задачи динамики. В те времена это и было оправдано, так как соответствующий уровень развития производительных сил потребовал решения в первую очередь задач установления свойств движения механических систем различных конструкций под действием заданных нагрузок и сил. Кроме того, решение прямых задач привлекало еще и тем, что, казалось, оно может восстановить прошлое в движении механической системы и предсказать будущее, если известно состояние системы в данный момент времени. Правда, эта иллюзия детерминизма была вскоре развеяна, в основном, благодаря развитию одного из разделов самой классической механики, теории устойчивости движения. Было установлено, что ни один процесс в природе не происходит так, как он определяется решением соответствующих уравнений движения при заданных начальных условиях.
Это объясняется, во-первых, тем, что сами уравнения движения не могут быть составлены точно с учетом всех явлений; во-вторых, любое движение механической системы сопровождается начальными, параметрическими и постоянно действующими возмущениями, они и вызывают отклонение действительного движения системы от движения, полученного решением детерминированной прямой задачи. Было установлено также, что для сохранения желательных свойств движения необходимо управлять движением рассматриваемой механической системы, добиваться устойчивости этого движения, требовать, чтобы оно было неподатливым ко всякого рода возмущениям. А для этого предварительно приходилось решать обратные задачи динамики, определять, при каких условиях осуществимо движение с заданными свойствами.
С другой стороны, и само развитие теории управления движениями материальных систем вызвало необходимость решения обратных задач динамики в различных постановках. Все это привело к тому, что обратные задачи классической механики оказались своего рода направляющими и исходными задачами современной науки об управлении движениями материальных систем различной физической природы и конструкций.
В настоящее время можно говорить о трех классах обратных задач динамики:
– обратные задачи аналитической механики;
– обратные задачи динамики управляемого полета;
– обратные задачи динамики в теории автоматического управления.
2. Обратные задачи динамики в теории автоматического управления
Теория автоматического управления и регулирования развивалась независимо от возникновения и развития концепций обратных задач динамики. Начиная с первых простейших автоматических регуляторов, инженеры и конструкторы создавали автоматические системы, которые обеспечивали протекание управляемых процессов по желаемым законам. В результате в теории автоматического управления разработано большое число практических приемов и методов, которые успешно применяются при проектировании и создании автоматических систем различного назначения. В основе каждого метода заложены концепции обратных задач динамики управляемых систем.
Действительно, частотные методы расчета и проектирования систем автоматического регулирования и управления основаны на приближении частотных характеристик проектируемой системы к соответствующим характеристикам желаемого вида, т.е. процессы в проектируемой системе должны быть близки к процессам, протекающим в некоторой эталонной системы, отвечающей требованиям технического задания на проектирования.
Расчет параметров систем автоматического регулирования корневыми методами также основан на приближении динамических характеристик проектируемой системы к соответствующим характеристикам некоторой эталонной системы. Мера близости динамических характеристик в таких процедурах расчета определяет соответствие между распределениями корней характеристических уравнений проектируемой и эталонной систем.
В теории автоматического управления широкое развитие получили методы синтеза замкнутых систем, основанные на решении оптимизационных задач с использованием различных функционалов, характеризующих качество процессов управления. Большое число процедур было разработано для параметрической оптимизации систем регулирования по критерию минимума интегральных квадратичных оценок, введенных А.А. Красовским еще в 40-е годы.
По определению интегральными квадратичными оценками рассматриваемой системы являются:
 - оценка нулевого порядка, - оценка нулевого порядка,
 - оценка первого порядка, - оценка первого порядка,
 - оценка порядка n
, - оценка порядка n
,
где x
(t
) – выходная переменная, характеризующая состояние системы - ее производные; n
– порядок системы. Величины - ее производные; n
– порядок системы. Величины  постоянны и имеют размерность времени. постоянны и имеют размерность времени.
Для вычисления интегральных квадратичных оценок разработаны различные приемы и способы, которые можно в учебной литературе по теории автоматического регулирования.
Задача формулируется следующим образом. Задана структура динамической системы; некоторые параметры системы являются варьируемыми, а остальные должны оставаться неизменными. Требуется найти такие значения варьируемых параметров, при которых реализуется минимум какой-либо интегральной квадратичной оценки. Сформулированная задача является задачей параметрической оптимизации динамической системы. Найденные в результате ее решения параметры именуются оптимальными, а систему с такими параметрами называют оптимальной по переходному процессу.
Схема решения задачи параметрической оптимизации в аналитической форме такова. Пусть  есть те параметры, которые необходимо определить из условия реализации минимума принятой интегральной квадратичной оценки есть те параметры, которые необходимо определить из условия реализации минимума принятой интегральной квадратичной оценки  . Выражение для оценки . Выражение для оценки  содержит неизвестные параметры . Оптимальные значения параметров определяются из уравнений содержит неизвестные параметры . Оптимальные значения параметров определяются из уравнений  . Практически параметрическая оптимизация проводится с применением численных методов, так как в аналитическом виде решение может быть получено в простейших случаях. Выражения для . Практически параметрическая оптимизация проводится с применением численных методов, так как в аналитическом виде решение может быть получено в простейших случаях. Выражения для  оказываются громоздкими, а уравнения для оптимальных параметров нелинейными. оказываются громоздкими, а уравнения для оптимальных параметров нелинейными.
Однако, как показано в работах А.А. Красовского и А.А. Фельдбаума, оптимальность системы по интегральному квадратичному критерию равносильна тому, что ошибка системы как функция времени подчиняется в процессе управления соответствующему дифференциальному уравнению.
Действительно. Пусть состояние системы характеризуется выходной переменной x
(t
) и ее производными  ). Предполагается, что порядок системы равен n
. Пусть в начальный момент ). Предполагается, что порядок системы равен n
. Пусть в начальный момент
 , ,  ,..., ,..., (1.1) (1.1)
Принимается, что собственное движение системы асимптотически устойчиво. Тогда при  система стремится к положению равновесия: система стремится к положению равновесия:
 (1.14) (1.14)
Рассмотрим оценку  и найдем такую функцию x
(t
), которая удовлетворяет граничным условиям (1.1), (1.2) и доставляет минимум интегралу . Обозначим через подынтегральное выражение в . Тогда согласно теории вариационного исчисления необходимое условие экстремума (минимума) интеграла будет иметь вид и найдем такую функцию x
(t
), которая удовлетворяет граничным условиям (1.1), (1.2) и доставляет минимум интегралу . Обозначим через подынтегральное выражение в . Тогда согласно теории вариационного исчисления необходимое условие экстремума (минимума) интеграла будет иметь вид
 (1.3) (1.3)
Это дифференциальное уравнение называется уравнением Эйлера-Пуассона. С учетом выражения для можно найти

и, кроме того,

Следовательно, уравнение (1.3) будет
 (1.4) (1.4)
Таким образом, экстремаль x
(t
), на которой интеграл обращается в минимум, является решением дифференциального уравнения (1.4) порядка 2n
. При этом x
(t
) должна удовлетворять граничным условиям (1.1) и (1.2). Характеристическое уравнение, отвечающее (1.16), таково:

Оно обладает тем свойством, что его корни попарно симметричны относительно начала координат комплексной плоскости p
, т.е. корням  , соответствуют корни, , соответствуют корни,  . На этом основании решение (1.4) можно записать в виде . На этом основании решение (1.4) можно записать в виде
 (1.5) (1.5)
где постоянные  , должны быть такими, чтобы выполнялись граничные условия. , должны быть такими, чтобы выполнялись граничные условия.
Пусть для определенности корни таковы, что
 , ,  , , 
В этом случае постоянные  в (1.5) должны быть равными нулю в силу того, что согласно (1.2) при в (1.5) должны быть равными нулю в силу того, что согласно (1.2) при  функция функция  и ее производные стремятся к нулю. Таким образом, выражение для экстремали и ее производные стремятся к нулю. Таким образом, выражение для экстремали  должно быть должно быть
 . (1.6) . (1.6)
Однако известно, что , определяемая формулой (1.6), есть решение одного дифференциального уравнения n
-го порядка
 (1.7) (1.7)
Коэффициенты  этого уравнения однозначно выражаются через корни этого уравнения однозначно выражаются через корни  по формулам Виета. по формулам Виета.
Отметим, что начальными условиями для уравнения (1.7) являются (1.1).
Из приведенного анализа следует, что экстремаль интеграла  при граничных условиях (1.1), (1.2) является решением однородного дифференциального уравнения (1.7), порядок которого равен порядку оптимизируемой системы. На этом основании можно заключить, что параметрическая оптимизация системы по критерию минимума интегральной квадратичной оценки выполняется из условия, чтобы выходная переменная x
(t
) системы в свободном движении изменялась во времени по предписанному закону, определяемому дифференциальным уравнением (1.7). Это в свою очередь означает, что задачу параметрической оптимизации можно рассматривать как обратную задачу динамики, формулируемую следующим образом: динамическая система заданной структуры имеет варьируемые параметры при граничных условиях (1.1), (1.2) является решением однородного дифференциального уравнения (1.7), порядок которого равен порядку оптимизируемой системы. На этом основании можно заключить, что параметрическая оптимизация системы по критерию минимума интегральной квадратичной оценки выполняется из условия, чтобы выходная переменная x
(t
) системы в свободном движении изменялась во времени по предписанному закону, определяемому дифференциальным уравнением (1.7). Это в свою очередь означает, что задачу параметрической оптимизации можно рассматривать как обратную задачу динамики, формулируемую следующим образом: динамическая система заданной структуры имеет варьируемые параметры  ; требуется найти такие значения этих параметров, при которых движение системы проходит по предписанной траектории, определяемой дифференциальным уравнением вида (1.7). ; требуется найти такие значения этих параметров, при которых движение системы проходит по предписанной траектории, определяемой дифференциальным уравнением вида (1.7).
Практически не всегда оказывается возможным провести параметрический синтез системы из условия, чтобы ее выходная переменная x
(t
) в точности была равна переменной , которая является экстремалью минимизируемого функционала  . В большинстве случаях параметры . В большинстве случаях параметры  ищутся из условия наилучшего (в каком-либо смысле) приближения x
(t
) и ищутся из условия наилучшего (в каком-либо смысле) приближения x
(t
) и  . Очень часто в качестве меры приближения используют определенные интегралы: . Очень часто в качестве меры приближения используют определенные интегралы:

и другие. Здесь  - отклонение выходной переменной оптимизируемой системы от экстремальной кривой - отклонение выходной переменной оптимизируемой системы от экстремальной кривой  ; ;  , ,  - производные по времени; - производные по времени;  , ,  - положительные числа. Выражение (1.7) представляет собой, по сути дела, также интегральные оценки, записанные для отклонений траектории синтезируемой системы от назначенной. - положительные числа. Выражение (1.7) представляет собой, по сути дела, также интегральные оценки, записанные для отклонений траектории синтезируемой системы от назначенной.
В прикладных задачах параметрической оптимизации не всегда используются интегральные квадратичные оценки, порядок которых равен порядку дифференциального уравнения оптимизируемой системы. Очень часто параметрический синтез проводят по квадратичным оценкам первого и второго порядка. В таких случаях параметры системы определяются из условия, чтобы выходная переменная x
(t
) приближалась к решению дифференциального уравнения первого или соответственно второго порядка.
Таким образом, требование оптимальности системы по переходному процессу в смысле минимума интегральной квадратичной оценки  равносильно требованию, чтобы выходная переменная системы в ее свободном движении изменялась в соответствии с решением однородного дифференциального уравнения порядка m
. равносильно требованию, чтобы выходная переменная системы в ее свободном движении изменялась в соответствии с решением однородного дифференциального уравнения порядка m
.
3. Применение спектрального метода для решения обратных задач динами
Рассмотрим решение спектральным методом обратной задачи динамики в следующей постановке.
Известна система автоматического управления (регулирования), которая может быть как стационарной, так и нестационарной, и работа которой описывается следующим дифференциальным уравнением:
 (2.1) (2.1)
где
 - сигнал на выходе системы; - сигнал на выходе системы;
 - сигнал на входе системы; - сигнал на входе системы;
 - коэффициенты дифференциального уравнения, являющиеся функциями времени. - коэффициенты дифференциального уравнения, являющиеся функциями времени.
При этом неизвестны некоторые параметры настройки системы управления, которые необходимо определить в процессе решения задачи. Обозначим множество этих параметров через  где где  - их число. Тогда коэффициенты дифференциального уравнения будут зависеть от - их число. Тогда коэффициенты дифференциального уравнения будут зависеть от  и, следовательно можно записать; и, следовательно можно записать;
 (2.2) (2.2)
Задан эталонный сигнал  на интервале на интервале  или его спектральная характеристика, который необходимо получить на выходе системы (2.2). В общем случае могут быть заданы ненулевые начальные условия: или его спектральная характеристика, который необходимо получить на выходе системы (2.2). В общем случае могут быть заданы ненулевые начальные условия:
 (2.3) (2.3)
Для заданных дифференциального уравнения (2.2), эталонного выходного сигнала и начальных условий (2.3) необходимо определить входной сигнал и искомые сигнала на выходе получили бы сигнал, максимально параметры настройки такими, что при подачи на вход системы автоматического управления найденного входного в известном смысле приближенный к эталонному.
В качестве меры близости реального сигнала на выходе системы (2.2), (2.3) к эталонному сигналу на интервале примем следующий функционал
 (2.4) (2.4)
Неизвестный входной сигнал будем искать в форме его спектрального разложения в ряд по некоторому базису ортонормированных функций  ; ;
где коэффициенты  , неизвестны и их необходимо определить. , неизвестны и их необходимо определить.
Следовательно входной сигнал будет зависеть от времени  и от множества параметров и от множества параметров  Тогда дифференциальное уравнение (2.2) можно записать в следующей виде Тогда дифференциальное уравнение (2.2) можно записать в следующей виде
 (2.5) (2.5)
Интегрируя уравнение  раз с учетом начальных условий, получим раз с учетом начальных условий, получим
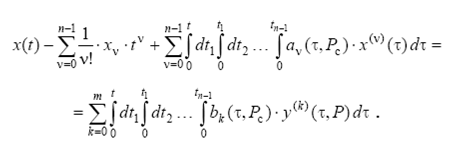 (2.6) (2.6)
Воспользовавшись справедливым для любой непрерывной функции тождеством

равенство (2.6) можно переписать в виде
 (2.7) (2.7)
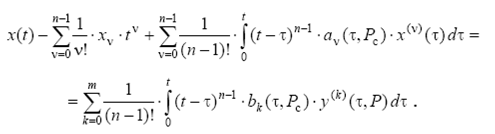
Интегрируя полученное равенство (2.7) по частям и применяя формулы
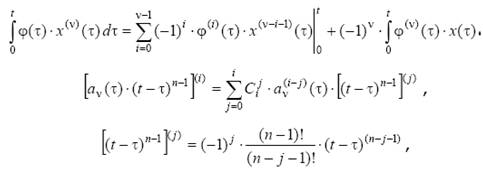
получим
 (2.8) (2.8)
где
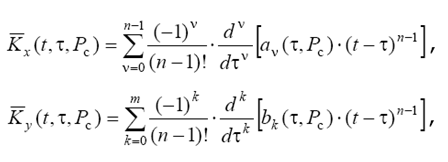
Уравнение (2.8) представляет собой уравнение Вольтера 2-го рода. Преобразуем его к интегральному уравнению Фредгольма 2-го рода на интервале исследования  : :
 (2.9) (2.9)
где
Таким образом, получены две эквивалентные формы описания системы: дифференциальное уравнение (2.2) с начальными условиями (2.3) и интегральное уравнение (2.9). Функция  в выражении (2.9) представляет собой полином, коэффициенты которого зависят от начальных условий (2.3) и от множества в выражении (2.9) представляет собой полином, коэффициенты которого зависят от начальных условий (2.3) и от множества  искомых параметров настройки системы автоматического управления (регулирования). Перепишем , изменив порядок суммирования искомых параметров настройки системы автоматического управления (регулирования). Перепишем , изменив порядок суммирования
Введем следующие обозначения:
Тогда полином можно записать следующим образом

где  - вектор-столбец начальных условий; - вектор-столбец начальных условий;  - вектор-столбец полиномов - вектор-столбец полиномов  . .
Рассмотрим левую часть уравнения (2.9). Представим функции, входящие в нее, в виде разложений в ряд по ортонормированному базису  . .
Имеем
 , (2.10) , (2.10)
где  - спектральная характеристика выходного сигнала , элементы которой определяются из соотношения - спектральная характеристика выходного сигнала , элементы которой определяются из соотношения
 (2.11) (2.11)
где   - квадратная матрица размерностью - квадратная матрица размерностью  , элементы которой определяются из выражения , элементы которой определяются из выражения

Подставив полученные разложения (2.10) и (2.11) в левую часть уравнения (2.9) и учитывая, что  , где , где  - единичная, в силу ортонормированности базисных функций, получим - единичная, в силу ортонормированности базисных функций, получим
 (2.12) (2.12)
где  - матрица спектральной характеристики инерционной части системы размерностью . - матрица спектральной характеристики инерционной части системы размерностью .
Сделаем аналогичные преобразования для правой части уравнения (2.9).
 , (2.13) , (2.13)
где  - спектральная характеристика сигнала на входе системы, элементы которой определяются из соотношения - спектральная характеристика сигнала на входе системы, элементы которой определяются из соотношения
 (2.14) (2.14)
где  - квадратная матрица размерностью - квадратная матрица размерностью  спектральной характеристики форсирующей части системы, элементы которой определяются из выражения спектральной характеристики форсирующей части системы, элементы которой определяются из выражения
 (2.15) (2.15)
где  - матрица размерностью - матрица размерностью  элементы которой определяются из соотношения элементы которой определяются из соотношения

Подставляя разложения (2.13), (2.14) и (2.15) в (2.9) и делая соответствующие преобразования, получим

 (2.16) (2.16)
Таким образом, уравнение (2.9) с учетом (2.12) и (2.16) можно переписать в следующем виде
 (2.17) (2.17)
Рассмотрим теперь функционал (2.4). Имеем
Так как  , то последние выражение можно записать в следующем виде , то последние выражение можно записать в следующем виде
 (2.18) (2.18)
или

где
 . (2.19) . (2.19)
Здесь спектральная характеристика эталонного сигнала  или задана или, в случае задании эталонного сигнала или задана или, в случае задании эталонного сигнала  , определяется из выражения , определяется из выражения
 , ,  . .
Таким образом, задача определения входного сигнала  (точнее множества (точнее множества  ) и множества ) и множества  неизвестных параметров настройки системы управления (2.2), (2.3) сводиться к задаче безусловной минимизации функционала (2.18) по элементам множеств и , т.е. неизвестных параметров настройки системы управления (2.2), (2.3) сводиться к задаче безусловной минимизации функционала (2.18) по элементам множеств и , т.е.
 . .
На рисунке 2.1 представлена структурная схема алгоритма решения поставленной задачи.
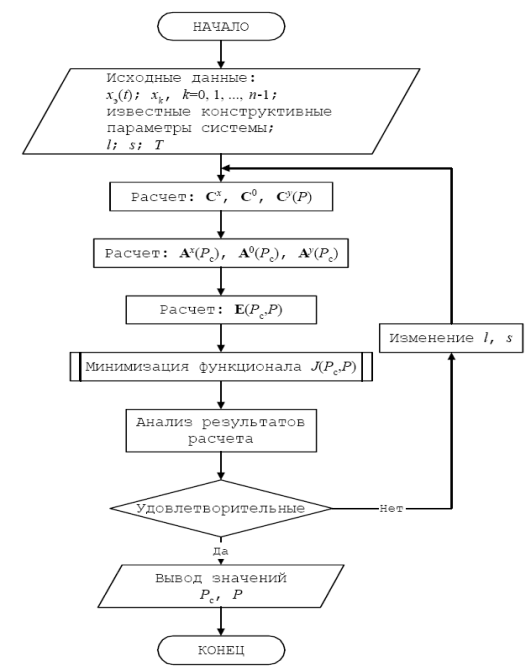
Рис 2.1 Структурная схема алгоритма решения обратной задачи динамики спектральным методом
4. Практическая часть
Рассмотрим отдельный блок системы самонаведения, структурная схема которого представлена на рисунке 1.
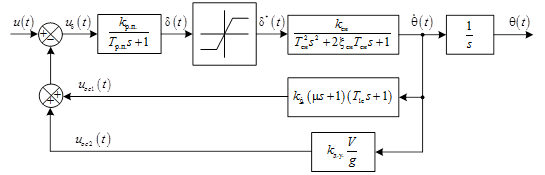
Рис. 1. Структурная схема системы
Задан эталонный закон изменения угла  , график которого представлен на рисунке 2. , график которого представлен на рисунке 2.
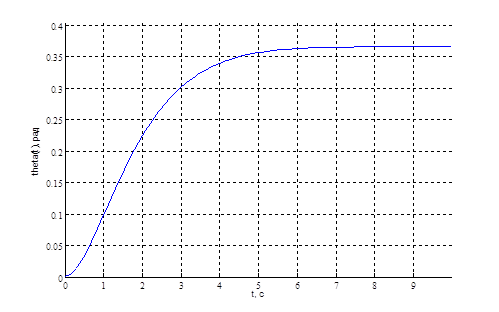
Рис. 2. График эталонного закона изменения угла 
Задача формулируется следующим образом. Необходимо найти управление  такое, которое обеспечит на выходе сигнал , максимально близкий к заданному эталонному закону. такое, которое обеспечит на выходе сигнал , максимально близкий к заданному эталонному закону.
5. Практическая часть
Данная задача относится к разряду неккоректных и мы будем решать её с применением оптимизационных методов.
Для решения данной задачи воспользуемся методом матричных операторов. В этом случае структурную схему можно представить в следующем виде (рис. 3).
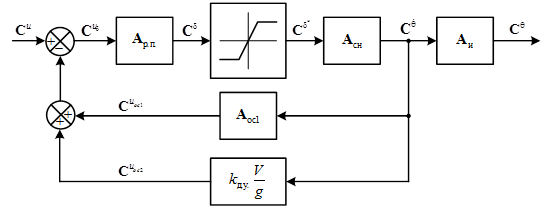
Рис. 3. Структурная схема системы в операторной форме
В качестве ортонормированной системы использовалась система функций Уолша с удержанием  элементов. В этом случае матричные операторы основных элементов системы будут следующими (представлены подматрицы размерностью элементов. В этом случае матричные операторы основных элементов системы будут следующими (представлены подматрицы размерностью  ): ):
 ; ;
 ; ;
 ; ;
 . .
Спектральная характеристика сигнала следующая (представлены первые пять элементов):
 . .
Решение поставленной задачи будем выполнять в следующие два этапа.
1. Поскольку известен эталонный выходной сигнал, то из уравнения
 (1) (1)
можно найти спектральную характеристику эталонного сигнала на выходе нелинейного элемента. Решая уравнение (1) относительно коэффициентов  с использованием метода Гаусса-Ньютона получены следующие числовые значения коэффициентов: с использованием метода Гаусса-Ньютона получены следующие числовые значения коэффициентов:
 . (2) . (2)
График соответствующего сигнала представлен на рисунке 4.
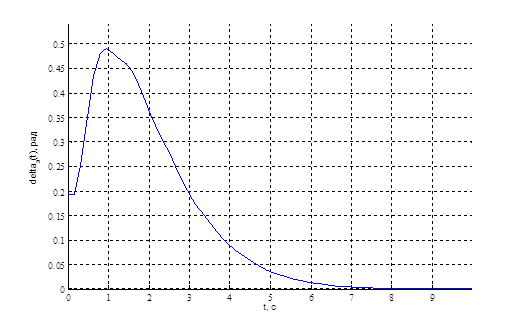
Рис. 4. График сигнала, который необходимо получить на выходе нелинейного элемента
Однако на выходе нелинейного элемента можно получить сигнал, представленный на рисунке 5 (ниже показаны первые пять элементов спектральной характеристики).
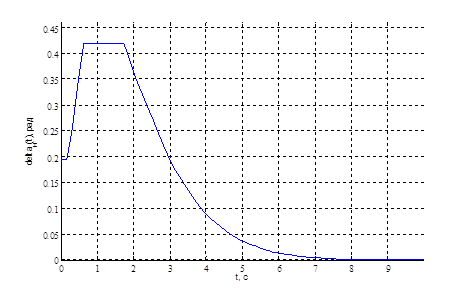
Рис. 5. Реальный сигнал на выходе нелинейного элемента
 . .
Тогда из (1) находим эталонный сигнал на выходе, который может обеспечить данная система (рис. 6). Его спектральная характеристика:
 . (3) . (3)
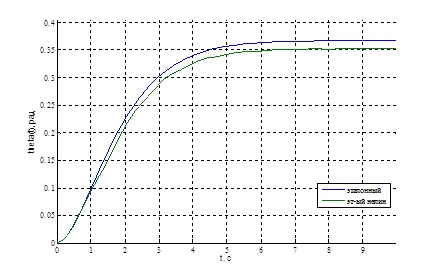
Рис. 6. Графики требуемого эталонного сигнала и эталонного сигнала, который можно получить
2. В результате решения предыдущего этапа найдены спектральные характеристики (3) эталонного выходного сигнала, который может обеспечить данная система, и (2) эталонного сигнала, которой необходимо получить на входе нелинейного элемента.
Далее искомый сигнал  представим в виде представим в виде
 , (4) , (4)
где  некоторая система линейно независимых функций. некоторая система линейно независимых функций.
В результате можно для спектральной характеристики сигнала на входе нелинейного элемента записать следующую зависимость.
 , (5) , (5)
где  – спектральная характеристика – спектральная характеристика  -го элемента системы . Поскольку известны спектральные характеристики эталонных сигналов -го элемента системы . Поскольку известны спектральные характеристики эталонных сигналов  и и  , то между левой и правой частями выражения (5) будет иметь место невязка , то между левой и правой частями выражения (5) будет иметь место невязка
 , (6) , (6)
зависящая от неизвестных коэффициентов  , ,  . Сформировав функционал . Сформировав функционал
 , (7) , (7)
исходную задачу синтеза входного сигнала можно свести к задаче поиска минимума функционала (7) на множестве допустимых значений коэффициентов , , т.е.
 . .
При решении задачи в качестве системы функций использовались экспоненциальные функции:  . Минимум функционала (7) искался с использование алгоритма Нелдера-Мида (алгоритма безусловной минимизации). В качестве начальных значений искомых коэффициентов были приняты нулевые. При этом значение функционала (7): . Минимум функционала (7) искался с использование алгоритма Нелдера-Мида (алгоритма безусловной минимизации). В качестве начальных значений искомых коэффициентов были приняты нулевые. При этом значение функционала (7):
 . .
Были получены следующие оптимальные значения искомых коэффициентов:
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 ; ;
 . .
Значение функционала (7) в оптимальной точке:
 . .
Следовательно, входной сигнал имеет следующий вид:


 . .
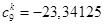
На рисунке 7 представлен график сигнала .
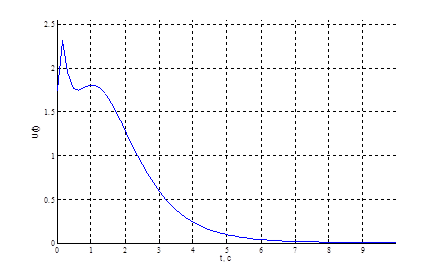
Рис. 7. График синтезируемого входного сигнала
На рисунке 8 представлены результаты анализа системы с использованием метода Рунге-Кутта для найденного входного сигнала и для сравнения приведены графики требуемого эталонного выходного сигнала и эталонного сигнала, который может обеспечить данная система.
Рис. 8. Графики выходных сигналов системы
Таким образом, можно построить следующий алгоритм решения задачи синтеза входного сигнала нелинейной системы:
1) задается эталонный выходной сигнал;
2) из (1) находится сигнал на выходе нелинейного элемента, который на выходе системы обеспечивает требуемый эталонный процесс;
3) найденный в предыдущем пункте сигнал представляется как сигнал на входе нелинейного элемента и находится реальный сигнал на выходе нелинейного элемента и уточняется эталонный сигнал на выходе системы;
4) поскольку известны сигналы на входе нелинейного элемента и на выходе системы, то, представив искомый входной сигнал в виде (4), строится невязка (6) и функционал (7);
5) минимизируя полученный функционал, находятся числовые значения искомых коэффициентов , ;
6) проводится анализ полученных результатов.
5. Результаты расчёта
1. Эталонный закон изменения угла teta(t)
Число точек квантования по времени: Nt = 499;
Шаг квантования: h_t = 0.020000 c;
Время поражения цели: T = 9.960000 c;
2. Числовые значения параметров системы самонаведения
Krp = 1.000000;
Trp = 0.330000, с;
Xmax = 0.418879, рад;
Ksn = 0.283000, рад/с;
Tsn = 0.155000, с;
DZsn = 0.052000;
V = 686.700000, м/с;
G = 9.810000, м/с^2;
Kdy = 0.140000;
Kv = 1.200000, c;
mu = 0.115000, с;
Tc = 3.050000, с;
3. Базис - функции Уолша
Число элементов: Nl = 64;
Оператор интегрирования Ai размерностью 5x5
+4.980000e+000 +2.490000e+000 +0.000000e+000 +1.245000e+000 +0.000000e+000
-2.490000e+000 +0.000000e+000 +1.245000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 -1.245000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000
-1.245000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000 +6.225000e-001
+0.000000e+000 +0.000000e+000 +0.000000e+000 -6.225000e-001 +0.000000e+000
Оператор дифференцирования Ad размерностью 5x5
+0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000
4. Матричные операторы системы
Arp размерностью 5x5
+9.668675e-001 +3.313252e-002 -3.310223e-002 +3.310224e-002 -3.171612e-002
-3.313252e-002 +9.006024e-001 +9.930669e-002 +3.310223e-002 -3.171610e-002
-3.310223e-002 -9.930669e-002 +8.343980e-001 +3.307196e-002 -3.168711e-002
-3.310224e-002 +3.310223e-002 -3.307196e-002 +7.682541e-001 +2.220418e-001
-3.171612e-002 +3.171610e-002 -3.168711e-002 -2.220418e-001 +7.048218e-001
Asn размерностью 5x5
+2.824568e-001 -1.904545e-003 -3.561384e-003 +6.907620e-003 -4.945520e-003
+1.904545e-003 +2.862659e-001 +1.403039e-002 +3.561384e-003 -6.087807e-003
-3.561384e-003 -1.403039e-002 +2.791431e-001 +1.571978e-002 -7.488732e-003
-6.907620e-003 +3.561384e-003 -1.571978e-002 +2.477036e-001 +3.501836e-002
-4.945520e-003 +6.087807e-003 -7.488732e-003 -3.501836e-002 +2.378125e-001
Aos1 размерностью 5x5
-6.831527e+001 +0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 -6.831527e+001 +0.000000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 +0.000000e+000 -6.831527e+001 +0.000000e+000 +0.000000e+000
+0.000000e+000 +0.000000e+000 +0.000000e+000 -6.831527e+001 +0.000000e+000
+0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000 -6.831527e+001
Aos2 размерностью 5x5
+9.800000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 +9.800000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 +0.000000e+000 +9.800000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 +0.000000e+000 +0.000000e+000 +9.800000e+000 +0.000000e+000
+0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000 +9.800000e+000
Apr размерностью 5x5
+2.730338e-001 +9.500096e-003 -1.194782e-002 +1.128111e-002 -7.250387e-003
-9.500096e-003 +2.540337e-001 +3.517674e-002 +1.194782e-002 -8.567413e-003
-1.194782e-002 -3.517674e-002 +2.301380e-001 +1.306212e-002 -5.530241e-003
-1.128111e-002 +1.194782e-002 -1.306212e-002 +2.040138e-001 +5.461586e-002
-7.250387e-003 +8.567413e-003 -5.530241e-003 -5.461586e-002 +1.895130e-001
Aos размерностью 5x5
-5.851527e+001 +0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 -5.851527e+001 +0.000000e+000 +0.000000e+000 +0.000000e+000
+0.000000e+000 +0.000000e+000 -5.851527e+001 +0.000000e+000 +0.000000e+000
+0.000000e+000 +0.000000e+000 +0.000000e+000 -5.851527e+001 +0.000000e+000
+0.000000e+000 +0.000000e+000 +0.000000e+000 +0.000000e+000 -5.851527e+001
As размерностью 5x5
+3.194591e-001 +1.707523e-001 +5.751752e-004 +8.508857e-002 +5.722004e-004
-1.707523e-001 -2.204553e-002 +8.393822e-002 -5.751752e-004 +5.722004e-004
+5.751752e-004 -8.393822e-002 -2.089518e-002 -5.751662e-004 +5.721915e-004
-8.508857e-002 -5.751752e-004 +5.751662e-004 -1.974485e-002 +3.882646e-002
+5.722004e-004 -5.722004e-004 +5.721915e-004 -3.882646e-002 -1.860045e-002
5. СХ эталонного выхода
Ctheta размерностью 5x1
+2.948462e-001
-7.002572e-002
-4.945100e-002
-5.104576e-002
-1.450117e-002
Начальные значения искомых коэффициентов
Cu_0 размерностью 5x1
+0.000000e+000
+0.000000e+000
+0.000000e+000
+0.000000e+000
+0.000000e+000
Oshibka_0 = 3.145671e-001
Conditioning of Gradient Poor - Switching To LM method
Optimization terminated: directional derivative along
search direction less than TolFun and infinity-norm of
gradient less than 10*(TolFun+TolX).
Оптимальные значения искомых коэффициентов
Cu_opt размерностью 5x1
+5.349004e-001
+5.156158e-001
+3.167675e-001
+3.345843e-001
+3.459092e-002
Oshibka_0 = 1.444098e-004
-------------------------------------------------------------
Время расчета:
0 часов, 0 минут, 34.703 секунд.
Приложение
1)
% Программа синтеза управления системы самонаведения (рассматривается часть % системы) методами обратных задач динамики с использованием метода % матричных операторов (линейная модель)
close all;
clear all;
clc;
my_tic;
global Nl;
global U tgl;
global Krp Trp Ksn Tsn DZsn V G Kdy Kv mu Tc Xmax;
%% 1. Эталонный закон изменения угла teta(t)
% Время наведения
fId = fopen('t_navedenija.dat','r');
t_f = fread(fId,inf,'real*8')';
fclose(fId);
Nt_f = length(t_f);
h_t_f = t_f(2)-t_f(1);
T = t_f(Nt_f);
% угол theta(t)
fId = fopen('theta_navedenija.dat','r');
theta_f = fread(fId,[1 Nt_f],'real*8');
fclose(fId);
% расстояние до цели
fId = fopen('r_navedenija.dat','r');
r_f = fread(fId,[1 Nt_f],'real*8');
fclose(fId);
fprintf('1. Эталонный закон изменения угла teta(t)\n');
fprintf('Число точек квантования по времени: Nt = %i;\n',Nt_f);
fprintf('Шаг квантования: h_t = %f c;\n',h_t_f);
fprintf('Время поражения цели: T = %f c;\n',T);
fprintf('\n');
my_plot2(t_f,theta_f,'t, c','theta(t), рад');
my_plot2(t_f,r_f,'t, c','r(t), м');
% пересчет на больший шаг квантования
Nt = 64;
h_t = T/(Nt-1);
t = 0: h_t: T;
theta = spline(t_f,theta_f,t);
r = spline(t_f,r_f,t);
my_plot2(t,theta,'t, c','theta(t), рад');
my_plot2(t,r,'t, c','r(t), м');
%% 2. Параметры системы
% Числовые значения параметров системы самонаведения
Krp = 1; %
Trp = 0.33; % с
Xmax = 24*pi/180; % рад
Ksn = 0.283; % рад/с
Tsn = 0.155; % с
DZsn = 0.052; %
V = 70*9.81; % м/с
G = 9.81; % м/с^2
Kdy = 0.14; %
Kv = 1.2; % c
mu = 0.115; % с
Tc = 3.05; % с
fprintf('2. Числовые значения параметров системы самонаведения\n');
fprintf('Krp = %f;\n',Krp);
fprintf('Trp = %f, с;\n',Trp);
fprintf('Xmax = %f, рад;\n',Xmax);
fprintf('Ksn = %f, рад/с;\n',Ksn);
fprintf('Tsn = %f, с;\n',Tsn);
fprintf('DZsn = %f;\n',DZsn);
fprintf('V = %f, м/с;\n',V);
fprintf('G = %f, м/с^2;\n',G);
fprintf('Kdy = %f;\n',Kdy);
fprintf('Kv = %f, c;\n',Kv);
fprintf('mu = %f, с;\n',mu);
fprintf('Tc = %f, с;\n',Tc);
fprintf('\n');
%% 3. Формирование ортонормированного базиса
Nl = Nt;
setsize(Nl);
settime(T);
Ai = mkint; % оператор интегрирования
Ad = inv(Ai); % оператор дифференцирования
Ae = eye(Nl); % единичная матрица
fprintf('3. Базис - функции Уолша\n');
fprintf('Число элементов: Nl = %i;\n',Nl);
pr_matrix(Ai,'Оператор интегрирования Ai')
pr_matrix(Ad,'Оператор дифференцирования Ad')
%% 4. Расчет операторов системы
Arp = inv(Trp*Ae+Ai)*(Krp*Ai);
Asn = inv(Tsn^2*Ae+2*DZsn*Tsn*Ai+Ai*Ai)*(Ksn*Ai*Ai);
Aos1 = Kv*mu*Tc*Ad*Ad+Kv*(mu+Tc)*Ad+Kv*Ae;
Aos2 = (Kdy*V/G)*Ae;
Apr = Asn*Arp;
Aos = Aos1+Aos2;
As = inv(Ae+Aos*Apr)*Apr;
As = Ai*As;
fprintf('4. Матричные операторы системы\n');
pr_matrix(Arp,'Arp');
pr_matrix(Asn,'Asn');
pr_matrix(Aos1,'Aos1');
pr_matrix(Aos2,'Aos2');
pr_matrix(Apr,'Apr');
pr_matrix(Aos,'Aos');
pr_matrix(As,'As');
%% 5. Расчет спектральной характеристики эталонного выхода
Ctheta = fwht(theta');
fprintf('5. СХ эталонного выхода\n');
pr_matrix(Ctheta,'Ctheta');
%% 6. Синтез входного сигнала
Cu_0 = zeros(Nl,1);
fprintf('Начальные значения искомых коэффициентов\n');
pr_matrix(Cu_0,'Cu_0');
oshibka = sqrt((As*Cu_0-Ctheta)'*(As*Cu_0-Ctheta));
fprintf('Oshibka_0 = %e\n',oshibka);
my_function = @(Cu)sqrt((As*Cu-Ctheta)'*(As*Cu-Ctheta));
% optimset('Display','iter','NonlEqnAlgorithm','gn','TolFun',1e-8,...
Cu = fsolve(my_function,Cu_0,...
optimset('NonlEqnAlgorithm','gn','TolFun',1e-8,...
'TolX',1e-8,'MaxFunEvals',50000,'MaxIter',50000));
% Cu = inv(As)*Ctheta;
fprintf('Оптимальные значения искомых коэффициентов\n');
pr_matrix(Cu,'Cu_opt');
oshibka = sqrt((As*Cu-Ctheta)'*(As*Cu-Ctheta));
fprintf('Oshibka_0 = %e\n',oshibka);
U = iwht(Cu)';
tgl = t;
my_plot2(t,U,'t, c','U(t)');
%% 7. Анализ полученных результатов (метод Рунге-Кутта (ode45))
[tt,yy] = ode45(@ode_navedenija1,t,[0 0 0 0]);
theta_rr = yy(:,1)';
my_plot2(t,[theta;theta_rr],'t, c','theta(t), рад','',['эталонный ';'реальный ']);
my_toc;
2)
второстепенные программы:
function dy = ode_navedenija1(t,y);
global U tgl;
global Krp Trp Ksn Tsn DZsn V G Kdy Kv mu Tc Xmax;
a32 = -1/(Tsn^2);
a33 = -2*DZsn/Tsn;
a3f = Ksn/(Tsn^2);
a42 = -(Krp/Trp)*(Kv-Kv*mu*Tc/(Tsn^2)+Kdy*V/G);
a43 = -(Krp/Trp)*(Kv*(mu+Tc)-2*Kv*mu*Tc*DZsn/Tsn);
a44 = -1/Trp;
a4f = -(Krp/Trp)*Kv*Ksn*mu*Tc/(Tsn^2);
b4 = Krp/Trp;
u = spline(tgl,U,t);
dy = zeros(4,1);
dy(1) = y(2);
dy(2) = y(3);
y4 = y(4);
dy(3) = a32*y(2)+a33*y(3)+a3f*y4;
dy(4) = b4*u+a42*y(2)+a43*y(3)+a44*y(4)+a4f*y4;
|