|
Трансформация преобразований
Предисловие. 4
1. Понятие трансформации преобразований. 5
2. Трансформация движения движением. 6
2.1. Трансформация осевой симметрии движением. 6
2.2. Трансформация параллельного переноса движением. 7
2.3. Трансформация поворота движением. 8
2.4. Трансформация центральной симметрии движением. 8
2.5. Трансформация зеркальной симметрии движением. 8
2.6. Трансформация поворота относительно оси движением. 8
3. Трансформация гомотетии движением. 9
4. Трансформация гомотетии гомотетией. 9
5. Трансформация движения гомотетией. 12
5.1. Трансформация осевой симметрии гомотетией. 12
5.2. Трансформация параллельного переноса гомотетией. 12
5.3. Трансформация произвольного движения гомотетией. 12
6. Трансформация подобия гомотетией. 13
7. Трансформация движения подобием. 13
8. Трансформация подобия движением. 13
9. Трансформация гомотетии подобием. 14
10. Трансформация подобия подобием. 14
11. Трансформация движения аффинным преобразованием. 15
11.1. Трансформация параллельного переноса аффинным преобразованием. 15
11.2. Трансформация центральной симметрии аффинным преобразованием 15
11.2. Трансформация осевой симметрии аффинным преобразованием. 16
12. Трансформация гомотетии аффинным преобразованием. 17
13. Трансформация аффинного преобразования гомотетией. 17
13.1. Трансформация произвольного аффинного преобразования гомотетией 18
13.2. Трансформация косого сжатия гомотетией. 18
13.3. Трансформация сдвига гомотетией. 20
14. Трансформация аффинного преобразования движением. 21
14.1. Трансформация произвольного аффинного преобразования движением 21
14.1.1. Трансформация аффинного преобразования параллельным переносом 21
14.1.2. Трансформация аффинного преобразования центральной симметрией 21
14.1.3. Трансформация аффинного преобразования осевой симметрией. 22
14.1.4. Трансформация аффинного преобразования зеркальной симметрией 23
14.2. Трансформация косого сжатия движением. 23
14.3. Трансформация сдвига движением. 24
15. Трансформация аффинного преобразования подобием. 25
15.1. Трансформация косого сжатия подобием. 25
15.2. Трансформация сдвига подобием. 26
16. Трансформация аффинного преобразования аффинным преобразованием. 27
16.1. Трансформация косого сжатия произвольным аффинным преобразованием 27
17. Решение задач с помощью трансформации преобразований. 28
Библиографический список. 32
Преобразованиями можно отображать не только точки и прямые, но и сами преобразования, поэтому в данной работе мы рассмотрим, как с помощью одного преобразования можно получить другое.
Целью моей работы является рассмотрение темы трансформации преобразований. Основные задачи:
· Познакомиться с литературой по данной теме
· Ввести понятие трансформации преобразований
· Рассмотреть различные примеры трансформаций
· Привести примеры задач, решаемых с помощью трансформации преобразований
В основном в работе рассматриваются преобразования плоскости, если не оговорено иное.
При написании данной работы во многом использовалась книга «Перемещения и подобия плоскости» Понарина Я.П. и Скопеца З.А. В ней дается систематическое и углубленное изложение теории перемещений и преобразований подобия плоскости, рассматриваются многочисленные примеры, иллюстрирующие применение теоретических положений. Анализируются задачи на вычисление, доказательство и построение, рационально решаемые с помощью метода геометрических преобразований, также предлагаются задачи для самостоятельного решения.
Также большую помощь при написании данной работы оказала книга Понарина Я.П. «Преобразования пространства». Здесь содержится теоретический и практический материал по теме аффинных преобразований, рассмотрены движения, подобия и аффинные преобразования трехмерного пространства. Изложение сопровождается образцами решения задач.
Хотелось бы отметить книгу Яглома И.М. и Ашкинузе В.Г. «Идеи и методы аффинной и проективной геометрии». Часть 1. Она содержит разнообразный материал, связанный с идеями и методами аффинной геометрии, причем этот материал преподносится без отрыва от элементарной геометрии.
1. Понятие трансформации преобразований
 Если f
и g
– преобразования некоторого множества, например, множества всех точек плоскости, и f
(
A
)=
B
, g
(
A
)=
A
1
, g
(
B
)=
B
1
, то точке А1
поставим в соответствие точку В1
. Вообще, каждую пару (А,
f
(
A
))
отобразим преобразованием g
. Множество всех полученных при этом новых пар (А1
,
g
(
f
(
A
)))
есть новое преобразование плоскости, являющееся композицией Если f
и g
– преобразования некоторого множества, например, множества всех точек плоскости, и f
(
A
)=
B
, g
(
A
)=
A
1
, g
(
B
)=
B
1
, то точке А1
поставим в соответствие точку В1
. Вообще, каждую пару (А,
f
(
A
))
отобразим преобразованием g
. Множество всех полученных при этом новых пар (А1
,
g
(
f
(
A
)))
есть новое преобразование плоскости, являющееся композицией  (рис.1), поскольку эта композиция отображает А1
на В1
. Условимся обозначать (рис.1), поскольку эта композиция отображает А1
на В1
. Условимся обозначать  и говорить, что преобразование f
g
получается из f
под действием преобразования g
. Запись f
g
кратко будем читать «эф под же». и говорить, что преобразование f
g
получается из f
под действием преобразования g
. Запись f
g
кратко будем читать «эф под же».
Итак, по определению
 , (1) , (1)
в частности,  и E
f
=
E
. и E
f
=
E
.
Имеют место следующие формулы:
 ,
,
 , (2) , (2)
(
f
g
)-1
= (
f
-1
)
g
.
Действительно,  . Поскольку . Поскольку  , то, вставляя , то, вставляя  между g
и f
и используя ассоциативное свойство всякой композиции преобразований, получаем между g
и f
и используя ассоциативное свойство всякой композиции преобразований, получаем  . Далее
. Далее   . Учитывая, что преобразование, обратное композиции данных преобразований, является композицией обратных им преобразований, взятых в обратном порядке, т.е.
. Учитывая, что преобразование, обратное композиции данных преобразований, является композицией обратных им преобразований, взятых в обратном порядке, т.е.  , получаем , получаем  . Наконец, . Наконец,  . .
Если преобразование f
инволютивно, то и то и f
g
также инволютивно. В самом деле, если  , но f
≠ Е
, то , но f
≠ Е
, то  , но f
g
≠ Е
, так как из f
g
= Е
следует f
= Е
. , но f
g
≠ Е
, так как из f
g
= Е
следует f
= Е
.
Теорема о неподвижной
точке.
Если
А – неподвижная точка преобразования
f
, то
g
(
A
) – неподвижная точка преобразования
f
g
, и обратно:
f(A) = A ↔ f g
(g(A)) = g(A).
Доказательство. Если f(A) = A, то f g
(g(A)) = g(f(g-1
(g(A)))) = =g(f(A)) = g(A)
. Обратно, если f g
(g(A)) = g(A)
, т.е. g(f(g-1
(g(A)))) = g(A),
то
g(f(A)) = g(A)
. Поскольку при преобразовании образы любых двух различных точек не совпадают, то из совпадения образов точек f
(
A
)
и A
при преобразовании g
следует и совпадение этих точек: f
(
A
) =
A
. [1]
Аналогичная теорема имеет место и для двойных прямых.
Применим теперь рассмотренные формулы и свойства к движениям. Если f
и g
– движения, то, в силу (1), f
g
– тоже движение. Более того, так как неподвижные точки движения f
переходят в неподвижные точки движения f
g
, а вид движения характеризуется его неподвижными точками, то оба движения - f
и f
g
– одного и того же вида, независимо от движения g
.
Принимая во внимание предыдущее свойство неподвижных точек и двойных прямых, получим
(
Sl
)
g
=
Sg
(
l
)
. (3)
С помощью этой формулы можно получить аналогичные формулы для остальных движений частного вида. Для этого найдем сначала:
 . [1]
. [1]
Если прямые u
и v
параллельны, то отображение g отображает их на параллельные прямые g(u) и g
(
v
)
с сохранением расстояния между ними. Следовательно, если  , то , то
 . (4) . (4)
В частности, если g
есть поворот  , то по свойству поворота ориентированный угол между векторами , то по свойству поворота ориентированный угол между векторами  и
и  равен углу α поворота. Отсюда из равенства равен углу α поворота. Отсюда из равенства  следует, что результат поворота вектора не зависит от центра поворота. следует, что результат поворота вектора не зависит от центра поворота.
Теорема.
Для
любого вектора  , любого действительного числа х и перемещения
g
имеет место равенство: , любого действительного числа х и перемещения
g
имеет место равенство:
 .
(5)
.
(5)
Доказательство. Если  , то в силу (4) , то в силу (4)  . Так как движение g
сохраняет величину угла между векторами, а значит, и сохраняет, в частности, их сонаправленность или противонаправленность, то из . Так как движение g
сохраняет величину угла между векторами, а значит, и сохраняет, в частности, их сонаправленность или противонаправленность, то из  или или  вытекает соответственно вытекает соответственно  или или  . Отсюда и из равенства . Отсюда и из равенства  следует (5). следует (5).
Доказанная зависимость (5) с помощью первой формулы (2) обобщается на такую:
 . (6) . (6)
Действительно,  . .
Ясно, что зависимость вида (6) будет справедлива и для линейной комбинации любого числа векторов. [1]
Далее, если u
∩
v
=
O
, то g
(
u
)∩
g
(
v
) =
g
(
O
)
и  (
g
(
u
),
g
(
v
)) = (
g
(
u
),
g
(
v
)) =  (
u
,
v
)
, если g
– движение 1-го рода, и (
g
(
u
),
g
(
v
)) = -(
u
,
v
)
, если g
– движение 2-го рода. Поэтому, если (
u
,
v
)
, если g
– движение 1-го рода, и (
g
(
u
),
g
(
v
)) = -(
u
,
v
)
, если g
– движение 2-го рода. Поэтому, если  , то , то
 (7) (7)
где знак «+» берется при движении g
1-го рода и «-» - при движении g
второго рода. [1]
В частности, если прямая l
проходит через т.О
пересечения прямых u
и v
, то
 . (8) . (8)
Так как центральная симметрия – частный случай поворота, а именно – поворот на 180°, то  , а в силу формулы (7) , а в силу формулы (7)  , а это, в свою очередь, Zg
(
O
)
. Таким образом, , а это, в свою очередь, Zg
(
O
)
. Таким образом,
(
ZO
)
g
=
Zg
(
O
)
. (9)
Рассмотрим трансформацию преобразования пространства – зеркальной симметрии. Неподвижными точками преобразования  являются точки g
(
α
)
, которые также образуют плоскость (по свойству движения), значит, являются точки g
(
α
)
, которые также образуют плоскость (по свойству движения), значит,
 .
(10)
.
(10)
Поворот относительно оси l
на угол α
– это преобразование пространства, композиция двух зеркальных симметрий относительно плоскостей β
и γ
таких, что β∩γ =
l
, (β, γ) =
α
. Заметим, что в данном примере движение g также должно быть движением пространства, поэтому оно не может быть поворотом относительно точки. Далее,  , по формулам (2) это равняется
, по формулам (2) это равняется  (по (10)). Пусть g
(β)∩
g
(γ) =
m
, (
g
(β),
g
(γ)) = φ
. Тогда по определению поворота относительно оси (по (10)). Пусть g
(β)∩
g
(γ) =
m
, (
g
(β),
g
(γ)) = φ
. Тогда по определению поворота относительно оси  .
.
β∩γ =
l
, а т.к. образ пересечения равен пересечению образов, то g
(β)∩
g
(γ) =
g
(
l
)
и (
g
(β),
g
(γ)) = (β, γ)
, если g
– первого рода и (
g
(β),
g
(γ)) =
= -(β, γ)
, если g
– второго рода, поэтому
 . (12)
. (12)
Рассмотрим  . Пусть g
(О)=А
. Тогда по свойству неподвижных точек и двойных прямых, А
– неподвижная точка преобразования , также мы имеем пучок неподвижных прямых в т. А, поэтому данное преобразование не может быть поворотной гомотетией или гомотетической симметрией. Следовательно, . Пусть g
(О)=А
. Тогда по свойству неподвижных точек и двойных прямых, А
– неподвижная точка преобразования , также мы имеем пучок неподвижных прямых в т. А, поэтому данное преобразование не может быть поворотной гомотетией или гомотетической симметрией. Следовательно,  . Найдем коэффициент с, для этого рассмотрим точку М1
, пусть |М1
,A| = d. . Найдем коэффициент с, для этого рассмотрим точку М1
, пусть |М1
,A| = d.
Пусть g(М1) = М, мы знаем, что g
(О)=А
тогда по свойствам движения |МО| =
d
.
Пусть  , по определению гомотетии |М2
О| =
kd
. , по определению гомотетии |М2
О| =
kd
.
Пусть g
(М2
) = М3
, по свойствам движения |М3
А| =
kd
. А т.к. при гомотетии все расстояния изменяются в одно и то же число раз, то с =
k
. Следовательно,
 . (21) . (21)
Найдем сначала композицию двух гомотетий  , для этого рассмотрим вектор , для этого рассмотрим вектор  . По свойству гомотетии, . По свойству гомотетии,  , а , а  . .
Рассмотрим первый случай, когда lk
= 1
, тогда мы получили преобразование, при котором вектор перешел сам в себя, а это параллельный перенос  . Найдем вектор . Найдем вектор  , для этого найдем образ точки О
при этой композиции. , для этого найдем образ точки О
при этой композиции.  , а , а  : :  . Тогда . Тогда  . Значит, композиция двух гомотетий . Значит, композиция двух гомотетий  при lk
= 1
есть параллельный перенос на вектор при lk
= 1
есть параллельный перенос на вектор  . .
 . (22) . (22)
Рассмотрим второй случай, когда lk
≠ 1
. Найдем неподвижные точки этого преобразования. Пусть точка М
– неподвижная, тогда если  , а , а  , то М =
D
, значит, , то М =
D
, значит,  . Но . Но   . Т.к. . Т.к.  и и  , то , то  . Тогда . Тогда  . Т.к. lk
≠ 1
, то выразим вектор . Т.к. lk
≠ 1
, то выразим вектор  : :  . Значит, у данного преобразования только одна неподвижная точка М
, причем . Значит, у данного преобразования только одна неподвижная точка М
, причем  , следовательно, точки O
, Q
, M
лежат на одной прямой. , следовательно, точки O
, Q
, M
лежат на одной прямой.
Докажем теперь, что данное преобразование будет гомотетией с центром в т. М
и коэффициентом lk
. Возьмем произвольную точку Е
, пусть  , а , а   . Докажем, что . Докажем, что  (рис. 2). Разложим векторы (рис. 2). Разложим векторы  и и  по векторам по векторам  и и  . По правилу треугольника, . По правилу треугольника,  , а , а  . Ранее мы выразили вектор . Ранее мы выразили вектор  через вектор через вектор  : :  , тогда вектор , тогда вектор  выражается через вектор выражается через вектор  следующим образом: следующим образом:  . Вектор . Вектор  при гомотетии при гомотетии  переходит в вектор переходит в вектор  , тогда , тогда  . Значит, . Значит,  . Теперь приведем подобные слагаемые и разложим вектор по векторам . Теперь приведем подобные слагаемые и разложим вектор по векторам  и , после этого получим и , после этого получим  . Вектор . Вектор  при гомотетии при гомотетии  переходит в вектор , значит, переходит в вектор , значит,   , а вектор вновь выразим через , а вектор вновь выразим через  , тогда , тогда  . Приведем подобные слагаемые, получим . Приведем подобные слагаемые, получим
 . По правилу треугольника . По правилу треугольника  , следовательно , следовательно  . Таким образом, мы показали, что преобразование . Таким образом, мы показали, что преобразование  произвольную точку E
переводит в точку G
такую, что произвольную точку E
переводит в точку G
такую, что  , следовательно, это преобразование – гомотетия с центром в точке М
и коэффициентом lk
. , следовательно, это преобразование – гомотетия с центром в точке М
и коэффициентом lk
.
 . (23) . (23)
Сейчас найдем преобразование  .
.  , а это по формуле (23) равняется
, а это по формуле (23) равняется  , ,  . Далее применяя формулу (23), получаем . Далее применяя формулу (23), получаем  , ,  . Выразим вектор . Выразим вектор  через вектор через вектор  . По правилу треугольника, . По правилу треугольника,  . Мы уже знаем, что . Мы уже знаем, что  , тогда , тогда  . Приведем подобные слагаемые, получим . Приведем подобные слагаемые, получим  . Так как , то . Так как , то  . Значит, . Значит,  . Таким образом, . Таким образом,
 .
(24) .
(24)
Рассмотрим  . По теореме о неподвижных точках, прямая . По теореме о неподвижных точках, прямая  – неподвижная прямая преобразования , значит, это осевая симметрия с осью m
. – неподвижная прямая преобразования , значит, это осевая симметрия с осью m
.
 . (25) . (25)
 , но , но  , ,  . [1] Тогда . [1] Тогда   , что по формуле (22) равняется , что по формуле (22) равняется  . Следовательно, . Следовательно,
 . (26) . (26)
Рассмотрим  . По теореме о неподвижных точках, неподвижными точками преобразования являются образы неподвижных точек движения f
. Докажем, что это – движение. . По теореме о неподвижных точках, неподвижными точками преобразования являются образы неподвижных точек движения f
. Докажем, что это – движение.  . Рассмотрим точки А
и L
, |
AL
| =
d
. Пусть при гомотетии . Рассмотрим точки А
и L
, |
AL
| =
d
. Пусть при гомотетии  они переходят соответственно в точки В
и М
, тогда |
BM
| =
d
/
k
. При движении f
точки В
и М
переходят соответственно в точки С
и N
, тогда |
CN
| =
d
/
k
, т.к. движение сохраняет расстояния между точками. Пусть при гомотетии они переходят соответственно в точки В
и М
, тогда |
BM
| =
d
/
k
. При движении f
точки В
и М
переходят соответственно в точки С
и N
, тогда |
CN
| =
d
/
k
, т.к. движение сохраняет расстояния между точками. Пусть при гомотетии  точки С
и N
переходят соответственно в точки D
и P
, |
DP
| =
kd
/
k
=
d
.
Мы получили, что преобразование сохраняет расстояния между точками, значит, это движение, неподвижными точками которого являются образы неподвижных точек движения f
, а т.к. вид движения определяется его неподвижными точками, то - движение того же вида, что и f
. точки С
и N
переходят соответственно в точки D
и P
, |
DP
| =
kd
/
k
=
d
.
Мы получили, что преобразование сохраняет расстояния между точками, значит, это движение, неподвижными точками которого являются образы неподвижных точек движения f
, а т.к. вид движения определяется его неподвижными точками, то - движение того же вида, что и f
.
Рассмотрим  , где f
– подобие. Известно, что подобие – это композиция движения и гомотетии, тогда , где f
– подобие. Известно, что подобие – это композиция движения и гомотетии, тогда  , а это, по формулам (2), равняется , а это, по формулам (2), равняется  . Как было доказано в 5.3, . Как было доказано в 5.3,  - движение того же вида, что и g
, а по формуле (24) - движение того же вида, что и g
, а по формуле (24)  . Следовательно, . Следовательно,  - подобие того же вида, что и f
. Если f - подобие того же вида, что и f
. Если f
 , то , то
 . (27) . (27)
Пусть подобие – это композиция движения g
и гомотетии  , то движение f
под подобием – это , то движение f
под подобием – это   . В силу ассоциативности композиции преобразований, . В силу ассоциативности композиции преобразований,   . По доказанному в п. 5.3 = f
1
- движение того же вида, что и f
, а его неподвижные точки – образы неподвижных точек движения f
при гомотетии . По доказанному в п. 5.3 = f
1
- движение того же вида, что и f
, а его неподвижные точки – образы неподвижных точек движения f
при гомотетии  . Тогда . Тогда  . Но f
1
g
=
f
2
– движение того же вида, что и f
1
, а его неподвижные точки – образы неподвижных точек движения f
1
при движении g
. Тогда . Но f
1
g
=
f
2
– движение того же вида, что и f
1
, а его неподвижные точки – образы неподвижных точек движения f
1
при движении g
. Тогда  - движение того же вида, что и f
, а его неподвижные точки – образы неподвижных точек движения f
при подобии - движение того же вида, что и f
, а его неподвижные точки – образы неподвижных точек движения f
при подобии  . .
Пусть подобие – это композиция движения f
и гомотетии , тогда подобие под движением g
 по формулам (2) есть по формулам (2) есть  . fg
=
f
1
– движение того же вида, что и f
, а его неподвижные точки – образы неподвижных точек движения f
при движении g
, а по формуле (21) . fg
=
f
1
– движение того же вида, что и f
, а его неподвижные точки – образы неподвижных точек движения f
при движении g
, а по формуле (21)  . Тогда . Тогда  , а это подобие. , а это подобие.
 . (28) . (28)
Рассмотрим   . В силу ассоциативности композиции преобразований, . В силу ассоциативности композиции преобразований,   . По формуле (24), . По формуле (24),  ,
,  . Тогда . Тогда   (по формуле (21)). Таким образом, (по формуле (21)). Таким образом,
 . (29) . (29)
Подобие φ
под подобием ψ
 . По формулам (2), . По формулам (2),  . .  - движение того же вида, что и f
, а его неподвижные точки – образы неподвижных точек движения f
при подобии ψ
. По формуле (29), - движение того же вида, что и f
, а его неподвижные точки – образы неподвижных точек движения f
при подобии ψ
. По формуле (29),   . Тогда . Тогда
 , (30) , (30)
где ξ - подобие такое, что  , , а h
– движение того же вида, что и f
, а его неподвижные точки – образы неподвижных точек движения f
при подобии ψ
. , , а h
– движение того же вида, что и f
, а его неподвижные точки – образы неподвижных точек движения f
при подобии ψ
.
 Рассмотрим произвольную точку М
, найдем ее образ при преобразовании Рассмотрим произвольную точку М
, найдем ее образ при преобразовании  . При преобразовании g
-1
она переходит в точку М1
(рис. 3), которая при параллельном переносе . При преобразовании g
-1
она переходит в точку М1
(рис. 3), которая при параллельном переносе  прейдет в точку М2
, прейдет в точку М2
,  , далее М2
при преобразовании g
перейдет в точку М3
. Заметим, что вектор , далее М2
при преобразовании g
перейдет в точку М3
. Заметим, что вектор  при преобразовании g перейдет в вектор при преобразовании g перейдет в вектор  , значит, вся трансформация , значит, вся трансформация  есть параллельный перенос на вектор есть параллельный перенос на вектор  . .
 , (31) , (31)
где .
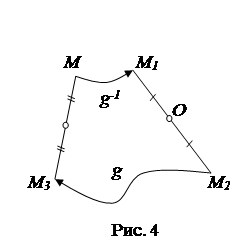 Рассмотрим произвольную точку М
, найдем ее образ при преобразовании Рассмотрим произвольную точку М
, найдем ее образ при преобразовании  . При преобразовании g
-1
она переходит в точку М1
(рис. 4), которая при центральной симметрии ZO
прейдет в точку М2
, О
– середина М1
М2
, далее М2
при преобразовании g
перейдет в точку М3
. Заметим, что точка О
при преобразовании g перейдет в середину отрезка ММ3
(т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), а по теореме о неподвижной точке g
(
O
)
будет неподвижной точкой нового преобразования, значит, вся трансформация . При преобразовании g
-1
она переходит в точку М1
(рис. 4), которая при центральной симметрии ZO
прейдет в точку М2
, О
– середина М1
М2
, далее М2
при преобразовании g
перейдет в точку М3
. Заметим, что точка О
при преобразовании g перейдет в середину отрезка ММ3
(т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), а по теореме о неподвижной точке g
(
O
)
будет неподвижной точкой нового преобразования, значит, вся трансформация  есть центральная симметрия Zg
(
O
)
.
есть центральная симметрия Zg
(
O
)
.  . (32) . (32)
 Рассмотрим произвольную точку М
, найдем ее образ при преобразовании Рассмотрим произвольную точку М
, найдем ее образ при преобразовании   . При преобразовании g
-1
она переходит в точку М1
(рис. 5), которая при осевой симметрии Sl
прейдет в точку М2
, . При преобразовании g
-1
она переходит в точку М1
(рис. 5), которая при осевой симметрии Sl
прейдет в точку М2
,   , О
– середина М1
М2
, далее М2
при преобразовании g
перейдет в точку М3
. Заметим, что точка О
при преобразовании g
перейдет в середину отрезка ММ3
(т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), и ее образ – О1
– будет лежать на образе прямой l
при преобразовании g
- g
(
l
)
. По теореме о неподвижных прямых, прямая g
(
l
)
будет неподвижной прямой нового преобразования. Заметим также, что если при осевой симметрии прямые, соединяющие точки с их образами, были параллельны, то и после трансформации они будут параллельны и наклонены под одним и тем же углом к прямой g
(
l
)
, значит, вся трансформация , О
– середина М1
М2
, далее М2
при преобразовании g
перейдет в точку М3
. Заметим, что точка О
при преобразовании g
перейдет в середину отрезка ММ3
(т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), и ее образ – О1
– будет лежать на образе прямой l
при преобразовании g
- g
(
l
)
. По теореме о неподвижных прямых, прямая g
(
l
)
будет неподвижной прямой нового преобразования. Заметим также, что если при осевой симметрии прямые, соединяющие точки с их образами, были параллельны, то и после трансформации они будут параллельны и наклонены под одним и тем же углом к прямой g
(
l
)
, значит, вся трансформация  есть косая симметрия Sg
(
l
)
. есть косая симметрия Sg
(
l
)
.
 . (33) . (33)
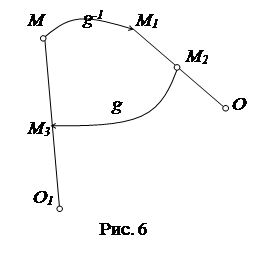 Рассмотрим произвольную точку М
, найдем ее образ при преобразовании Рассмотрим произвольную точку М
, найдем ее образ при преобразовании  . При преобразовании g
-1
она переходит в точку М1
(рис. 6), которая при гомотетии прейдет в точку М2
, . При преобразовании g
-1
она переходит в точку М1
(рис. 6), которая при гомотетии прейдет в точку М2
,  , далее М2
при преобразовании g
перейдет в точку М3
. Заметим, что точка О
при преобразовании g
перейдет в точку О1
на прямой ММ3
, причем , далее М2
при преобразовании g
перейдет в точку М3
. Заметим, что точка О
при преобразовании g
перейдет в точку О1
на прямой ММ3
, причем  (т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), а по теореме о неподвижной точке точка О1
будет неподвижной при новом преобразовании, значит, вся трансформация (т.к. при аффинном преобразовании сохраняется принадлежность точек одной прямой и отношение расстояний между ними), а по теореме о неподвижной точке точка О1
будет неподвижной при новом преобразовании, значит, вся трансформация  есть гомотетия есть гомотетия  . .
 . (35) . (35)
Далее будем предполагать, что аффинные преобразования g
и g
-1
заданы аналитически.
g
:  g
-1
: g
-1
:  где образы начала координат и базисных векторов при преобразовании g
имеют координаты: O
’(
d
1
, d2
,
d
3
)
, где образы начала координат и базисных векторов при преобразовании g
имеют координаты: O
’(
d
1
, d2
,
d
3
)
,  (
a
1
,
a
2
,
a
3
)
, (
a
1
,
a
2
,
a
3
)
,  (
b
1
,
b
2
,
b
3
)
, (
b
1
,
b
2
,
b
3
)
,  (
c
1
,
c
2
,
c
3
)
, а при преобразовании g
-1
O
’’(
n
1
,
n
2
,
n
3
), (
c
1
,
c
2
,
c
3
)
, а при преобразовании g
-1
O
’’(
n
1
,
n
2
,
n
3
),  (
k
1
,
k
2
,
k
3
), (
k
1
,
k
2
,
k
3
),  (
l
1
,
l
2
,
l
3
), (
l
1
,
l
2
,
l
3
),  (
m
1
,
m
2
,
m
3
)
. (
m
1
,
m
2
,
m
3
)
.
Известно, что движение является частным случаем аффинного преобразования, значит, движение под аффинным преобразованием, как композиция аффинных преобразований, также будет аффинным преобразованием.
Выберем систему координат таким образом, чтобы центр гомотетии совпадал с началом координат, тогда  будет задаваться аналитически следующим образом. будет задаваться аналитически следующим образом.
 Рассмотрим произвольную точку М(
x
,
y
,
z
)
, найдем ее образ при преобразовании Рассмотрим произвольную точку М(
x
,
y
,
z
)
, найдем ее образ при преобразовании  . При гомотетии . При гомотетии  точка М
переходит в точку М1
(
x
/
k
,
y
/
k
,
z
/
k
)
. Далее, при аффинном преобразовании g
М1
переходит в точку М2
( точка М
переходит в точку М1
(
x
/
k
,
y
/
k
,
z
/
k
)
. Далее, при аффинном преобразовании g
М1
переходит в точку М2
(
 , ,  , ,  )
. M
2
при гомотетии переходит в М3
( )
. M
2
при гомотетии переходит в М3
(
 , ,  , ,  )
. Тогда )
. Тогда  - аффинное преобразование, аналитически оно задается следующим образом. - аффинное преобразование, аналитически оно задается следующим образом.
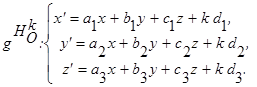 (34) (34)
Мы получили, что
 (35) (35)
где  - параллельный перенос, - параллельный перенос,  . .
Рассмотрим гомотетию и косое сжатие g
с осью q
, направлением l
и коэффициентом m
. Найдем, что представляет собой трансформация косого сжатия гомотетией –  , для этого возьмем произвольную точку А
и найдем ее образ при данной трансформации (рис. 7). , для этого возьмем произвольную точку А
и найдем ее образ при данной трансформации (рис. 7). 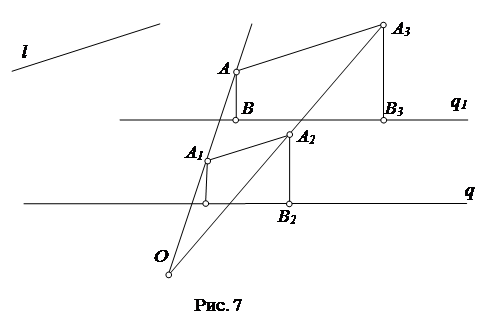 Точка А
при гомотетии Точка А
при гомотетии  перейдет в точку А1
, которая при косом сжатии перейдет в точку А2
такую, что А1
А2
||
l
, перейдет в точку А1
, которая при косом сжатии перейдет в точку А2
такую, что А1
А2
||
l
,  . Точка А2
при гомотетии перейдет в точку А3
. Заметим, что прямая . Точка А2
при гомотетии перейдет в точку А3
. Заметим, что прямая  – инвариантная прямая всей трансформации (по теореме о неподвижных прямых). Из точек А1
и А2
проведем перпендикуляры на прямую q
– А1
В1
и А2
В2
, а из точек А
и А3
– на прямую q
1
– АВ
и А3
В3
. Тогда АВ
и А3
В3
– образы отрезков А1
В1
и А2
В2
при гомотетии , значит, – инвариантная прямая всей трансформации (по теореме о неподвижных прямых). Из точек А1
и А2
проведем перпендикуляры на прямую q
– А1
В1
и А2
В2
, а из точек А
и А3
– на прямую q
1
– АВ
и А3
В3
. Тогда АВ
и А3
В3
– образы отрезков А1
В1
и А2
В2
при гомотетии , значит,  , следовательно, , следовательно, . Мы получили, что при этой трансформации расстояние от точки А
до прямой q
1
изменилось в m
раз: . Мы получили, что при этой трансформации расстояние от точки А
до прямой q
1
изменилось в m
раз: . Причем из того, что А1
А2
||
l
, следует, что AA
3
||
l
, потому что при гомотетии прямая переходит в параллельную ей прямую, значит, точка А
сместилась в направлении l
. Следовательно, в силу произвольности точки А
, искомая трансформация есть косое сжатие с осью . Причем из того, что А1
А2
||
l
, следует, что AA
3
||
l
, потому что при гомотетии прямая переходит в параллельную ей прямую, значит, точка А
сместилась в направлении l
. Следовательно, в силу произвольности точки А
, искомая трансформация есть косое сжатие с осью  , направлением l
и коэффициентом m
. , направлением l
и коэффициентом m
.
Рассмотрим гомотетию и сдвиг g
с осью q
и коэффициентом m
. Найдем, что представляет собой трансформация сдвига гомотетией –  , для этого возьмем произвольную точку А
и найдем ее образ при данной трансформации (рис. 8). , для этого возьмем произвольную точку А
и найдем ее образ при данной трансформации (рис. 8).
 Точка А
при гомотетии Точка А
при гомотетии  перейдет в точку А1
, которая при сдвиге перейдет в точку А2
такую, что А1
А2
||
q
, перейдет в точку А1
, которая при сдвиге перейдет в точку А2
такую, что А1
А2
||
q
,  . Точка А2
при гомотетии . Точка А2
при гомотетии  перейдет в точку А3
. Заметим, что прямая перейдет в точку А3
. Заметим, что прямая  – инвариантная прямая всей трансформации (по теореме о неподвижных прямых). Из точки А1
проведем перпендикуляр на прямую q
А1
В1
, а из точки А
– на прямую q
1
– АВ
. Тогда АВ
– образ отрезка А1
В1
при гомотетии , также АА3
– образ отрезка А1
А2
при гомотетии , значит, – инвариантная прямая всей трансформации (по теореме о неподвижных прямых). Из точки А1
проведем перпендикуляр на прямую q
А1
В1
, а из точки А
– на прямую q
1
– АВ
. Тогда АВ
– образ отрезка А1
В1
при гомотетии , также АА3
– образ отрезка А1
А2
при гомотетии , значит,  и АА3
||А1
А2
||q||q1
, (потому что при гомотетии прямая переходит в параллельную ей прямую), следовательно, и АА3
||А1
А2
||q||q1
, (потому что при гомотетии прямая переходит в параллельную ей прямую), следовательно, и АА3
||q1
. Мы получили, что при этой трансформации точка А смещается параллельно прямой q1
на расстояние, пропорциональное ее расстоянию от прямой q1
: и АА3
||q1
. Мы получили, что при этой трансформации точка А смещается параллельно прямой q1
на расстояние, пропорциональное ее расстоянию от прямой q1
:  . Следовательно, в силу произвольности точки А
, искомая трансформация есть сдвиг с осью . Следовательно, в силу произвольности точки А
, искомая трансформация есть сдвиг с осью  и коэффициентом m
. и коэффициентом m
.
14.1.
Трансформация произвольного аффинного преобразования движением
14.1.1. Трансформация аффинного преобразования параллельным переносом
Данную трансформацию рассмотрим в пространстве. Пусть параллельный перенос задан вектором  , (
a
,
b
,
c
)
. Рассмотрим произвольную точку М(
x
,
y
,
z
)
, найдем ее образ при преобразовании , (
a
,
b
,
c
)
. Рассмотрим произвольную точку М(
x
,
y
,
z
)
, найдем ее образ при преобразовании  . При параллельном переносе . При параллельном переносе  точка М
переходит в точку М1
(
x
-
a
,
y
-
b
,
z
-
c
)
. Далее, при аффинном преобразовании g
точка М1
переходит в точку М2
(
a
1
x
+
b
1
y
+ +
c
1
z
-
aa
1
-
bb
1
-
cc
1
+
d
1
,
a
2
x
+
b
2
y
+
c
2
z
-
aa
2
-
bb
2
-
cc
2
+ +
d
2
,
a
3
x
+
b
3
y
+
c
3
z
-
aa
3
-
bb
3
-
cc
3
+
d
3
)
. M
2
при параллельном переносе точка М
переходит в точку М1
(
x
-
a
,
y
-
b
,
z
-
c
)
. Далее, при аффинном преобразовании g
точка М1
переходит в точку М2
(
a
1
x
+
b
1
y
+ +
c
1
z
-
aa
1
-
bb
1
-
cc
1
+
d
1
,
a
2
x
+
b
2
y
+
c
2
z
-
aa
2
-
bb
2
-
cc
2
+ +
d
2
,
a
3
x
+
b
3
y
+
c
3
z
-
aa
3
-
bb
3
-
cc
3
+
d
3
)
. M
2
при параллельном переносе  переходит в М3
(
a
1
x
+
b
1
y
+
c
1
z
-
aa
1
-
bb
1
-
cc
1
+
d
1
+
a
,
a
2
x
+
b
2
y
+
c
2
z
-
aa
2
-
bb
2
-
cc
2
+
d
2
+ +
b
,
a
3
x
+
b
3
y
+
c
3
z
-
aa
3
-
bb
3
-
cc
3
+
d
3
+
c
)
(п. 13). Тогда переходит в М3
(
a
1
x
+
b
1
y
+
c
1
z
-
aa
1
-
bb
1
-
cc
1
+
d
1
+
a
,
a
2
x
+
b
2
y
+
c
2
z
-
aa
2
-
bb
2
-
cc
2
+
d
2
+ +
b
,
a
3
x
+
b
3
y
+
c
3
z
-
aa
3
-
bb
3
-
cc
3
+
d
3
+
c
)
(п. 13). Тогда  - аффинное преобразование, аналитически оно задается следующим образом. - аффинное преобразование, аналитически оно задается следующим образом.
 (36) (36)
Мы получили, что
 , (37) , (37)
где  (- aa1
- bb1
- cc1
+ d1
+ a, - aa2
- bb2
- cc2
+ d2
+ b, - aa3
- bb3
- cc3
+ d3
+ c)
. (- aa1
- bb1
- cc1
+ d1
+ a, - aa2
- bb2
- cc2
+ d2
+ b, - aa3
- bb3
- cc3
+ d3
+ c)
.
14.1.2. Трансформация аффинного преобразования центральной симметрией
Рассмотрим центральную симметрию ZO
в пространстве, выберем систему координат таким образом, чтобы центр симметрии О
совпал с началом координат, тогда О(0, 0, 0)
. Рассмотрим произвольную точку М(
x
,
y
,
z
)
, найдем ее образ при преобразовании  . Т.к. центральная симметрия инволютивна, то . Т.к. центральная симметрия инволютивна, то  . При центральной симметрии ZO
точка М
переходит в точку М1
(-
x
, -
y
, -
z
)
. Далее, при аффинном преобразовании g
точка М1
переходит в точку М2
(-
a
1
x
-
b
1
y
-
c
1
z
+
d
1
, -
a
2
x
-
b
2
y
-
c
2
z
+
d
2
, -
a
3
x
-
b
3
y
-
c
3
z
+
d
3
)
(п. 13). M
2
при центральной симметрии ZO
переходит в М3
(
a
1
x
+
b
1
y
+
c
1
z
-
d
1
,
a
2
x
+
b
2
y
+
c
2
z
-
d
2
,
a
3
x
+
b
3
y
+
c
3
z
-
d
3
)
. Тогда . При центральной симметрии ZO
точка М
переходит в точку М1
(-
x
, -
y
, -
z
)
. Далее, при аффинном преобразовании g
точка М1
переходит в точку М2
(-
a
1
x
-
b
1
y
-
c
1
z
+
d
1
, -
a
2
x
-
b
2
y
-
c
2
z
+
d
2
, -
a
3
x
-
b
3
y
-
c
3
z
+
d
3
)
(п. 13). M
2
при центральной симметрии ZO
переходит в М3
(
a
1
x
+
b
1
y
+
c
1
z
-
d
1
,
a
2
x
+
b
2
y
+
c
2
z
-
d
2
,
a
3
x
+
b
3
y
+
c
3
z
-
d
3
)
. Тогда  - аффинное преобразование, аналитически оно задается следующим образом. - аффинное преобразование, аналитически оно задается следующим образом.
 (38) (38)
Мы получили, что
 , (39) , (39)
где  (-2
d
1
, -2
d
2
, -2
d
3
)
. (-2
d
1
, -2
d
2
, -2
d
3
)
.
14.1.3. Трансформация аффинного преобразования осевой симметрией
Рассмотрим осевую симметрию Sl
в пространстве, выберем систему координат таким образом, чтобы ось симметрии l
совпала с осью OZ
, тогда Sl
будет задаваться следующим образом.  Рассмотрим произвольную точку М(
x
,
y
,
z
)
, найдем ее образ при преобразовании Рассмотрим произвольную точку М(
x
,
y
,
z
)
, найдем ее образ при преобразовании  . Т.к. осевая симметрия инволютивна, то . Т.к. осевая симметрия инволютивна, то  . При осевой симметрии Sl
точка М
переходит в точку М1
(-
x
, -
y
,
z
)
. Далее, при аффинном преобразовании g
точка М1
переходит в точку М2
(-
a
1
x
-
b
1
y
+
c
1
z
+
d
1
, -
a
2
x
-
b
2
y
+
c
2
z
+
d
2
, -
a
3
x
-
b
3
y
+
c
3
z
+
d
3
)
(п. 13). M
2
при осевой симметрии Sl
переходит в М3
(
a
1
x
+
b
1
y
-
c
1
z
-
d
1
,
a
2
x
+
b
2
y
-
c
2
z
-
d
2
,
a
3
x
+
b
3
y
-
c
3
z
-
d
3
)
. Тогда . При осевой симметрии Sl
точка М
переходит в точку М1
(-
x
, -
y
,
z
)
. Далее, при аффинном преобразовании g
точка М1
переходит в точку М2
(-
a
1
x
-
b
1
y
+
c
1
z
+
d
1
, -
a
2
x
-
b
2
y
+
c
2
z
+
d
2
, -
a
3
x
-
b
3
y
+
c
3
z
+
d
3
)
(п. 13). M
2
при осевой симметрии Sl
переходит в М3
(
a
1
x
+
b
1
y
-
c
1
z
-
d
1
,
a
2
x
+
b
2
y
-
c
2
z
-
d
2
,
a
3
x
+
b
3
y
-
c
3
z
-
d
3
)
. Тогда  - аффинное преобразование, аналитически оно задается следующим образом. - аффинное преобразование, аналитически оно задается следующим образом.
 (40) (40)
14.1.4. Трансформация аффинного преобразования зеркальной симметрией
Рассмотрим зеркальную симметрию S
α
– преобразование постраноства, выберем систему координат таким образом, чтобы плоскость симметрии α совпала с плоскостью XOY
, тогда Sα
будет задаваться следующим образом.  Рассмотрим произвольную точку М(
x
,
y
,
z
)
, найдем ее образ при преобразовании Рассмотрим произвольную точку М(
x
,
y
,
z
)
, найдем ее образ при преобразовании  . Т.к. зеркальная симметрия инволютивна, то . Т.к. зеркальная симметрия инволютивна, то  . При зеркальной симметрии S
α
точка М
переходит в точку М1
(
x
,
y
, -
z
)
. Далее, при аффинном преобразовании g
точка М1
переходит в точку М2
(
a
1
x
+
b
1
y
-
c
1
z
+
d
1
,
a
2
x
+
b
2
y
-
c
2
z
+
d
2
,
a
3
x
+
b
3
y
-
c
3
z
+
d
3
)
(п. 13). M
2
при зеркальной симметрии S
α
переходит в М3
(
a
1
x
+
b
1
y
-
c
1
z
+
d
1
,
a
2
x
+
b
2
y
-
c
2
z
+
d
2
, -
a
3
x
-
b
3
y
+
c
3
z
-
d
3
)
. Тогда . При зеркальной симметрии S
α
точка М
переходит в точку М1
(
x
,
y
, -
z
)
. Далее, при аффинном преобразовании g
точка М1
переходит в точку М2
(
a
1
x
+
b
1
y
-
c
1
z
+
d
1
,
a
2
x
+
b
2
y
-
c
2
z
+
d
2
,
a
3
x
+
b
3
y
-
c
3
z
+
d
3
)
(п. 13). M
2
при зеркальной симметрии S
α
переходит в М3
(
a
1
x
+
b
1
y
-
c
1
z
+
d
1
,
a
2
x
+
b
2
y
-
c
2
z
+
d
2
, -
a
3
x
-
b
3
y
+
c
3
z
-
d
3
)
. Тогда  - аффинное преобразование, аналитически оно задается следующим образом. - аффинное преобразование, аналитически оно задается следующим образом.
 (41) (41)
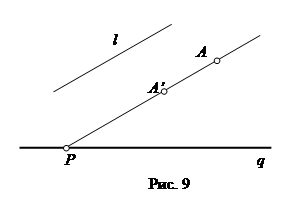 Косое сжатие – частный случай родства, при котором каждая точка А
плоскости смещается в некотором фиксированном направлении так, что ее расстояние от некоторой фиксированной прямой q
изменяется в k
раз: Косое сжатие – частный случай родства, при котором каждая точка А
плоскости смещается в некотором фиксированном направлении так, что ее расстояние от некоторой фиксированной прямой q
изменяется в k
раз:  (рис. 9). [3] (рис. 9). [3]
Рассмотрим произвольное движение f
и косое сжатие g
с осью q
, направлением l
и коэффициентом k
. Найдем, что представляет собой трансформация косого сжатия произвольным движением –  , для этого возьмем произвольную точку А
и найдем ее образ при данной трансформации (рис. 10). , для этого возьмем произвольную точку А
и найдем ее образ при данной трансформации (рис. 10).
Точка А
при произвольном движении f
-1
перейдет в точку А1
, которая при косом сжатии перейдет в точку А2
такую, что А1
А2
||
l
,  . Точка А2
при движении f
перейдет в точку А3
. Заметим, что прямая q
1
=
f
(
q
)
– инвариантная прямая всей трансформации (по теореме о неподвижных прямых). Из точек А1
и А2
проведем перпендикуляры на прямую q
– А1
В1
и А2
В2
, а из точек А
и А3
– на прямую q
1
– АВ
и А3
В3
. Тогда АВ
и А3
В3
– образы отрезков А1
В1
и А2
В2
при движении f
, значит, АВ = А1
В1
и А3
В3
= А2
В2
, следовательно, . Точка А2
при движении f
перейдет в точку А3
. Заметим, что прямая q
1
=
f
(
q
)
– инвариантная прямая всей трансформации (по теореме о неподвижных прямых). Из точек А1
и А2
проведем перпендикуляры на прямую q
– А1
В1
и А2
В2
, а из точек А
и А3
– на прямую q
1
– АВ
и А3
В3
. Тогда АВ
и А3
В3
– образы отрезков А1
В1
и А2
В2
при движении f
, значит, АВ = А1
В1
и А3
В3
= А2
В2
, следовательно,   . Мы получили, что при этой трансформации расстояние от точки А
до прямой q
1
изменилось в k
раз: . Мы получили, что при этой трансформации расстояние от точки А
до прямой q
1
изменилось в k
раз: . Причем из того, что А1
А2
||
l
, следует, что AA
3
||
f
(
l
)
, потому что при движении сохраняется параллельность прямых, значит, точка А
сместилась в направлении f
(
l
)
. Следовательно, в силу произвольности точки А
, искомая трансформация есть косое сжатие с осью f
(
q
)
, направлением f
(
l
)
и коэффициентом k
. . Причем из того, что А1
А2
||
l
, следует, что AA
3
||
f
(
l
)
, потому что при движении сохраняется параллельность прямых, значит, точка А
сместилась в направлении f
(
l
)
. Следовательно, в силу произвольности точки А
, искомая трансформация есть косое сжатие с осью f
(
q
)
, направлением f
(
l
)
и коэффициентом k
.
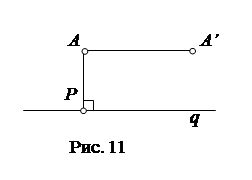
Сдвигом называется аффинное преобразование плоскости, при котором произвольная точка А
смещается параллельно фиксированной прямой q
на расстояние, пропорциональное ее расстоянию от прямой q
(рис. 11).  - коэффициент сдвига. [3] - коэффициент сдвига. [3]
  Рассмотрим произвольное движение f
и сдвиг g
с осью q
и коэффициентом k
. Найдем, что представляет собой трансформация сдвига произвольным движением – Рассмотрим произвольное движение f
и сдвиг g
с осью q
и коэффициентом k
. Найдем, что представляет собой трансформация сдвига произвольным движением –  , для этого возьмем произвольную точку А
и найдем ее образ при данной трансформации (рис. 12). , для этого возьмем произвольную точку А
и найдем ее образ при данной трансформации (рис. 12).
Точка А
при произвольном движении f
-1
перейдет в точку А1
, которая при сдвиге перейдет в точку А2
такую, что А1
А2
||
q
,  . Точка А2
при движении f
перейдет в точку А3
. Заметим, что прямая q
1
= =
f
(
q
)
– инвариантная прямая всей трансформации (по теореме о неподвижных прямых); АА3
– образ отрезка А1
А2
при движении f
, значит, АА3
= А1
А2
, d
(
A
1
,
q
) =
d
(
A
,
q
1
)
и АА3
||
q
, тогда . Точка А2
при движении f
перейдет в точку А3
. Заметим, что прямая q
1
= =
f
(
q
)
– инвариантная прямая всей трансформации (по теореме о неподвижных прямых); АА3
– образ отрезка А1
А2
при движении f
, значит, АА3
= А1
А2
, d
(
A
1
,
q
) =
d
(
A
,
q
1
)
и АА3
||
q
, тогда  . Следовательно, в силу произвольности точки А
, искомая трансформация есть сдвиг с осью f
(
q
)
и коэффициентом k
. . Следовательно, в силу произвольности точки А
, искомая трансформация есть сдвиг с осью f
(
q
)
и коэффициентом k
.
Рассмотрим косое сжатие g с осью q, направлением l
и коэффициентом m
и подобие  , где f – движение, найдем трансформацию gh
. , где f – движение, найдем трансформацию gh
.  . В силу ассоциативности композиции преобразований, . В силу ассоциативности композиции преобразований,   . По доказанному в п. 13.2, . По доказанному в п. 13.2,  есть g
1
- косое сжатие с осью
есть g
1
- косое сжатие с осью  , направлением l
и коэффициентом m
. Тогда , направлением l
и коэффициентом m
. Тогда  По доказанному в пункте 14.2, g
1
f
есть косое сжатие с осью f
(
q
1
)
, направлением f
(
l
)
и коэффициентом m
. Таким образом, вся искомая трансформация представляет собой косое сжатие с осью По доказанному в пункте 14.2, g
1
f
есть косое сжатие с осью f
(
q
1
)
, направлением f
(
l
)
и коэффициентом m
. Таким образом, вся искомая трансформация представляет собой косое сжатие с осью  , направлением f
(
l
)
и коэффициентом m
. , направлением f
(
l
)
и коэффициентом m
.
Рассмотрим сдвиг g с осью q и коэффициентом m
и подобие  , где f – движение, найдем трансформацию gh
. , где f – движение, найдем трансформацию gh
.    . В силу ассоциативности композиции преобразований, . В силу ассоциативности композиции преобразований,   . По доказанному в п. 13.3, . По доказанному в п. 13.3,  есть g
1
- сдвиг с осью
есть g
1
- сдвиг с осью  и коэффициентом m
. Тогда По доказанному в пункте 14.3, g
1
f
есть косое сжатие с осью f
(
q
1
)
и коэффициентом m
. Таким образом, вся искомая трансформация представляет собой косое сжатие с осью и коэффициентом m
. и коэффициентом m
. Тогда По доказанному в пункте 14.3, g
1
f
есть косое сжатие с осью f
(
q
1
)
и коэффициентом m
. Таким образом, вся искомая трансформация представляет собой косое сжатие с осью и коэффициентом m
.
 Рассмотрим произвольное аффинное преобразование и косое сжатие g
с осью q
, направлением l
и коэффициентом k
. Найдем, что представляет собой трансформация косого сжатия g
произвольным аффинным преобразованием f
– Рассмотрим произвольное аффинное преобразование и косое сжатие g
с осью q
, направлением l
и коэффициентом k
. Найдем, что представляет собой трансформация косого сжатия g
произвольным аффинным преобразованием f
–  , для этого возьмем произвольную точку А
и найдем ее образ при данной трансформации (рис. 13). , для этого возьмем произвольную точку А
и найдем ее образ при данной трансформации (рис. 13).
Точка А
при аффинном преобразовании f
-1
перейдет в точку А1
, которая при косом сжатии g
перейдет в точку А2
такую, что А1
А2
||
l
,  . Далее точка А2
при аффинном преобразовании f
перейдет в точку А3
. Заметим, что прямая q
1
=
f
(
q
)
– инвариантная прямая всей трансформации (по теореме о неподвижных прямых). Из точек А1
и А2
проведем перпендикуляры на прямую q
– А1
В1
и А2
В2
, а из точек А
и А3
– на прямую q
1
– АВ
и А3
В3
. Пусть АС
и А3
С3
– образы отрезков А1
В1
и А2
В2
при аффинном преобразовании f
, значит, А1
В1
||А2
В2
и . Далее точка А2
при аффинном преобразовании f
перейдет в точку А3
. Заметим, что прямая q
1
=
f
(
q
)
– инвариантная прямая всей трансформации (по теореме о неподвижных прямых). Из точек А1
и А2
проведем перпендикуляры на прямую q
– А1
В1
и А2
В2
, а из точек А
и А3
– на прямую q
1
– АВ
и А3
В3
. Пусть АС
и А3
С3
– образы отрезков А1
В1
и А2
В2
при аффинном преобразовании f
, значит, А1
В1
||А2
В2
и  (т.к. при косом сжатии сохраняется параллельность прямых и отношение параллельных отрезков), тогда (т.к. при косом сжатии сохраняется параллельность прямых и отношение параллельных отрезков), тогда  (соответственные углы при пересечении параллельных прямых секущей), следовательно, прямоугольные треугольники АВС
и А3
В3
С
3
подобны, исходя из этого (соответственные углы при пересечении параллельных прямых секущей), следовательно, прямоугольные треугольники АВС
и А3
В3
С
3
подобны, исходя из этого  . Мы получили, что при этой трансформации расстояние от точки А
до прямой q
1
изменилось в k
раз: . Мы получили, что при этой трансформации расстояние от точки А
до прямой q
1
изменилось в k
раз:  . Причем из того, что А1
А2
||
l
, следует, что AA
3
||
f
(
l
)
, потому что при косом сжатии сохраняется параллельность прямых, значит, точка А
сместилась в направлении f
(
l
)
. Следовательно, в силу произвольности точки А
, искомая трансформация есть косое сжатие с осью f
(
q
)
, направлением f
(
l
)
и коэффициентом k
. . Причем из того, что А1
А2
||
l
, следует, что AA
3
||
f
(
l
)
, потому что при косом сжатии сохраняется параллельность прямых, значит, точка А
сместилась в направлении f
(
l
)
. Следовательно, в силу произвольности точки А
, искомая трансформация есть косое сжатие с осью f
(
q
)
, направлением f
(
l
)
и коэффициентом k
.
 Задача 1.
Даны правильные одинаково ориентированные треугольники OAB
, OCD
, OEF
. Доказать, что середины M
, N
, P
соответственно отрезков BC
, DE
, AF
являются вершинами правильного треугольника. [1] Задача 1.
Даны правильные одинаково ориентированные треугольники OAB
, OCD
, OEF
. Доказать, что середины M
, N
, P
соответственно отрезков BC
, DE
, AF
являются вершинами правильного треугольника. [1]
Решение.
Из четырехугольника BEDC
находим:   (рис. 14). Помня, что результат поворота вектора не зависит от центра поворота, выполним поворот этих векторов на -60°: (рис. 14). Помня, что результат поворота вектора не зависит от центра поворота, выполним поворот этих векторов на -60°:  , ,   , ,  . На основании (6) образом вектора . На основании (6) образом вектора  будет вектор будет вектор   . Отсюда и следует, что треугольник MNP
правильный. . Отсюда и следует, что треугольник MNP
правильный.
Задача 2.
Найти все перемещения плоскости, перестановочные с осевой симметрией Sl
. [«Математика в школе», 1977, №1, задача 1802]
Решение.
Из определения (1) следует, что  . Если f
=
Sl
, то на основании зависимости (3) имеем: . Если f
=
Sl
, то на основании зависимости (3) имеем:  . Задача требует найти такие перемещения g
, чтобы . Задача требует найти такие перемещения g
, чтобы  . А для этого необходимо и достаточно того, чтобы Sl
=
Sg
(
l
)
, откуда l
=
g
(
l
)
. Перемещениями, отображающими прямую l
на себя, являются: осевая симметрия с осью l
, осевые симметрии, оси которых перпендикулярны прямой l
, центральные симметрии с центрами на l
, переносы параллельно l
, переносные симметрии с осью l
, тождественные перемещения и только эти преобразования. . А для этого необходимо и достаточно того, чтобы Sl
=
Sg
(
l
)
, откуда l
=
g
(
l
)
. Перемещениями, отображающими прямую l
на себя, являются: осевая симметрия с осью l
, осевые симметрии, оси которых перпендикулярны прямой l
, центральные симметрии с центрами на l
, переносы параллельно l
, переносные симметрии с осью l
, тождественные перемещения и только эти преобразования.
Задача 3.
Определить взаимное расположение центров A
, B
, C
и зависимость между коэффициентами k
, l
, m
гомотетий Ak
, Bl
, Cm
, если
 , (42) , (42)
где точки A
, B
, C
различны и числа k
, l
, m
не равны 1.
Решение.
Из данной зависимости (42) получаем:   , или в принятых обозначениях (1) , или в принятых обозначениях (1)
 . (43) . (43)
Рассмотрим отдельно два возможных случая: lk
≠ 1
и lk
= 1
. В первом случае  , причем , причем  . Отсюда получаем: . Отсюда получаем:  . Согласно формуле (24), результатом трансформации гомотетии гомотетией является снова гомотетия. Поэтому . Согласно формуле (24), результатом трансформации гомотетии гомотетией является снова гомотетия. Поэтому  , при этом по теореме о неподвижной точке Q
=
B
1/
l
(
P
)
и, следовательно, , при этом по теореме о неподвижной точке Q
=
B
1/
l
(
P
)
и, следовательно,  . Тогда (43) принимает вид: . Тогда (43) принимает вид:
 , ,
где Q
=
Cm
(
P
)
, и, значит,  . Так как . Так как  , ,  , ,  , то точки A
, B
, C
коллинеарны. Как видим, при lk
≠ 1
для коэффициентов k
, l
, m
дополнительных ограничений не возникает. , то точки A
, B
, C
коллинеарны. Как видим, при lk
≠ 1
для коэффициентов k
, l
, m
дополнительных ограничений не возникает.
При lk
= 1
по формуле (22) будет  , тогда , тогда   и согласно (26) и согласно (26)  . Поэтому (43) принимает вид . Поэтому (43) принимает вид  , или , или  при любом положении точки C
. Отсюда lm
= 1
. Итак, при lk
=
lm
= 1
центры A
, B
, C
гомотетий произвольны. при любом положении точки C
. Отсюда lm
= 1
. Итак, при lk
=
lm
= 1
центры A
, B
, C
гомотетий произвольны.
Задача 4.
Точки А
, В
, С
лежат на прямой а
, точки А1
, В1
, С1
– на прямой а1
, параллельной прямой а (рис. 15). Доказать, что точки P = (AB1
) ∩ (A1
B), Q
=
(
AC
1
)
∩
(
A
1
C
)
и R
= (
BC
1
) ∩ (
B
1
C
)
коллинеарны (теорема Паппа-Паскаля).
 Решение.
Рассмотрим гомотетии Pk
, Rl
, Qm
, заданные указанными центрами и парами точек A
→
B
1
, B
1
→
C
, C
→
A
1
соответственно. Так как по условию a
||
a
1
, то Qm
(
A
) =
C
1
, Rl
(
C
1
) =
B
, Pk
(
B
) =
A
1
. Замечаем, что Решение.
Рассмотрим гомотетии Pk
, Rl
, Qm
, заданные указанными центрами и парами точек A
→
B
1
, B
1
→
C
, C
→
A
1
соответственно. Так как по условию a
||
a
1
, то Qm
(
A
) =
C
1
, Rl
(
C
1
) =
B
, Pk
(
B
) =
A
1
. Замечаем, что  , поскольку произведение коэффициентов гомотетий в каждой из этих композиций одно и то же и эти композиции имеют общую пару соответственных точек A
→
A
1
. На основании предыдущей задачи при lk
≠ 1
точки P
, Q
, R
коллинеарны. Если же lk
=
lm
= 1
, то при a
||
a
1
это возможно лишь тогда, когда (
PR
) ||
a
и (
PQ
) ||
a
, то есть и в этом случае точки P
, Q
, R
коллинеарны. , поскольку произведение коэффициентов гомотетий в каждой из этих композиций одно и то же и эти композиции имеют общую пару соответственных точек A
→
A
1
. На основании предыдущей задачи при lk
≠ 1
точки P
, Q
, R
коллинеарны. Если же lk
=
lm
= 1
, то при a
||
a
1
это возможно лишь тогда, когда (
PR
) ||
a
и (
PQ
) ||
a
, то есть и в этом случае точки P
, Q
, R
коллинеарны.
Задача 5.
Если фигура имеет ось симметрии и единственный центр симметрии, то центр симметрии принадлежит оси симметрии. Доказать.
Решение.
Пусть l
– ось симметрии и Q
– единственный центр симметрии фигуры F
, то есть Sl
(
F
) =
F
и ZQ
(
F
) =
F
. Тогда композиция  отображает F
на себя. Поскольку отображает F
на себя. Поскольку  , где A
= =
Sl
(
Q
)
, то ZA
(
F
) =
F
. Следовательно, точка A
является центром симметрии фигуры F
. Если бы , где A
= =
Sl
(
Q
)
, то ZA
(
F
) =
F
. Следовательно, точка A
является центром симметрии фигуры F
. Если бы  , то A
≠
Q
, что противоречит условию единственности центра симметрии фигуры F
. Значит, , то A
≠
Q
, что противоречит условию единственности центра симметрии фигуры F
. Значит,  . .
Задача 6.
Если композиция двух подобий перестановочна и одно из них имеет единственную неподвижную точку, то эта точка неподвижна и при втором подобии. Доказать.
Решение.
Из (1) следует, что для любых преобразований f
и g
всегда выполняется равенство  . Из него видно, что для того, чтобы . Из него видно, что для того, чтобы  , необходимо и достаточно выполнения условия f
=
fg
. Если теперь f
и g
– подобия и A
– единственная неподвижная точка подобия f
(центр подобия), то она будет неподвижной при преобразовании fg
=
f
. С другой стороны, по теореме о неподвижной точке подобие fg
имеет неподвижную точку g
(
A
)
. В силу единственности неподвижной точки подобия f
=
fg
должно быть A
=
g
(
A
)
, то есть A
– неподвижная точка подобия g
. , необходимо и достаточно выполнения условия f
=
fg
. Если теперь f
и g
– подобия и A
– единственная неподвижная точка подобия f
(центр подобия), то она будет неподвижной при преобразовании fg
=
f
. С другой стороны, по теореме о неподвижной точке подобие fg
имеет неподвижную точку g
(
A
)
. В силу единственности неподвижной точки подобия f
=
fg
должно быть A
=
g
(
A
)
, то есть A
– неподвижная точка подобия g
.
1. Понарин, Я.П. Перемещения и подобия плоскости. [текст]/ Скопец З.А. – К.: Радянська школа, 1981. – 175 с.
2. Понарин, Я.П. Преобразования пространства. [текст] – Киров: Издательство ВГПУ, 2000. – 80 с.
3. Яглом, И.М. Идеи и методы аффинной и проективной геометрии. Часть 1. [текст]/ В.Г. Ашкинузе. – М.: Учпедгиз, 1962. – 247 с.
4. Скопец, З.А. Геометрические миниатюры. [текст]/ Сост. Г.Д. Глейзер. – М.: Просвещение, 1990. – 224 с.
5. Бахман, Ф. Построение геометрии на основе понятия симметрии. [текст] – М.: Наука, 1969.
|