| РЕФЕРАТ
96 с., 42 рис., 3 табл., 1 приложение, 23 источников.
Объект исследования – силовой полупроводниковый преобразователь в составе электромеханической системы имитатора ветротурбины.
Цель работы – построение математической модели силового полупроводникового преобразователя, а также проверка адекватности модели, т. е. сравнение экспериментальных данных с результатами расчета по методике.
В данной магистерской работе представлен автоматизированный электропривод постоянного тока. Произведен расчет силового полупроводникового преобразователя, конструктивный расчет сглаживающего реактора, а также расчет заземления и защитного отключения. С помощью многокритериальной оптимизации выбрано оптимальное значение индуктивности сглаживающего реактора. Построена математическая модель рассчитанной схемы силового полупроводникового преобразователя. Приведены структурная и принципиальная электрическая схемы и сборочный чертеж силового блока электромеханической системы для имитации поведения ветротурбин.
Проведены экспериментальные исследования электромагнитных процессов в разработанном трехфазном мостовом выпрямителе в составе электропривода имитатора.
ВЕТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА, ВЕТРОТУРБИНА, МУЛЬТИПЛИКАТОР, АВТОМАТИЗИРОВАННЫЙ ЭЛЕКТРОПРИВОД, МОМЕНТ ИНЕРЦИИ, МЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА, ДВИГАТЕЛЬ ПОСТОЯННОГО ТОКА, МОСТОВОЙ ВЫПРЯМИТЕЛЬ, СГЛАЖИВАЮЩИЙ РЕАКТОР, ВНЕШНЯЯ ХАРАКТЕРИСТИКА, МНОГОКРИТЕРИАЛЬНАЯ ОПТИМИЗАЦИЯ.
ВВЕДЕНИЕ
Интерес к проблемам использования возобновляемых источников энергии (ВИЭ) связан с увеличением масштабов потребления ископаемого топлива.
В настоящее время запасы органического топлива истощаются и его использование во все возрастающих объемах ведет к загрязнению окружающей среды стало всеобщим. Выделение углекислого газа, приводящего к глобальному потеплению. В будущем неизбежно сокращение потребления органического топлива и его замена другими источниками энергии. Использование ВИЭ наиболее привлекательно, так как оно не нарушает естественного баланса энергии, получаемой нашей планетой. К ВИЭ относятся: солнечная радиация, энергия ветра, энергия рек, приливов и океанских волн, энергия, заключенная в биомассе и органических отходах. Для Украины перспективным является использование ветроэнергетических ресурсов.
В ближайшем будущем ожидается значительный рост использования ВИЭ. В настоящее время доля возобновляемой энергии в энергобалансе Европы составляет 5,4 %. К 2010 году планируется довести этот показатель до 12%.
Энергия ветра известна человечеству не менее 2000 лет; в последние 10 15 лет бурно развивалось ее использование для производства электрической энергии. К настоящему времени в мире установлено более 20000 ветроэлектрических агрегатов, общая мощность которых превышает 16 млн. кВт. Современные ветроэнергетические установки (ВЭУ) имеют мощность от единиц киловатт до нескольких мегаватт и позволяют экономически эффективно с высокой степенью надежности преобразовывать энергию ветра. ВЭУ могут использоваться для различных целей, начиная от заряда аккумуляторных батарей (АБ) и энергоснабжения различных объектов (дома, фермы и пр.) до подачи электроэнергии в сети централизованного электроснабжения.
Энергия ветра в течение длительного времени рассматривается в качестве экологически чистого неисчерпаемого источника энергии. Прежде чем энергия ветра сможет принести значительную пользу, должны быть решены многие проблемы, главные из которых: высокая стоимость ветроэнергетических установок, их способность надежно работать в автоматическом режиме в течение многих лет и обеспечивать бесперебойное электроснабжение. Поэтому, сегодня наиболее важной задачей стоящей перед ветроэнергетикой является снижение удельной стоимости электрооборудования ВЭУ. Одним из путей снижения стоимости является применение более экономичных структур электрооборудования ВЭУ. [1]
Однако, перед разработчиками ЭО возникает ряд специфических трудностей, связанных с наличием в составе ВЭУ ветротурбины (ВТ). Испытание новых систем необходимо проводить в полевых условиях. Кроме того, стохастический характер ветрового потока (ВП) делает затруднительным испытание ВЭУ во всех возможных режимах.
Одним из путей преодоления возникших проблем, является применение имитатора ВТ, т. е. электромеханической системы способной имитировать механические характеристики реальной ВТ при различных заданных скоростях ВП. Такой подход является экономически выгодным, поскольку позволит производить испытания новых видов электрооборудования ВЭУ в лабораторных условиях без выезда на полигон.
1 ПРЕОБРАЗОВАНИЕ ЭНЕРГИИ ВЕТРА С ПОМОЩЬЮ ВЭУ
1.1 Характеристики ветрового потока
Свойства ветра. Ветер – это направленное перемещение воздушных масс. Ветровую энергию можно рассматривать как одну из форм проявления солнечной энергии, потому что Солнце является тем первоисточником, который влияет на погодные явления на Земле. Ветер возникает из-за неравномерного нагрева Солнцем поверхности Земли.
Ветер меняется с течением времени. В большинстве регионов наблюдаются значительные сезонные изменения ветровых потоков. Причем в зимние месяцы скорость ветра обычно выше, чем летом. Дневные изменения скорости ветра наблюдаются, как правило, вблизи морей и больших озер. Утром солнце нагревает землю быстрее, чем воду, поэтому ветер дует в направлении побережья. Вечером же земля остывает быстрее, чем вода, поэтому ветер дует от побережья.
Скорость ветра зависит от высоты над уровнем земли. Близко к земле ветер замедляется за счет трения о земную поверхность. Таким образом, ветры бывают сильнее на больших высотах по отношению к земле. Для сельскохозяйственных полей и пустынных территорий при увеличении высоты над поверхностью земли в два раза наблюдается увеличение скорости ветра приблизительно на 12%.
На скорость ветра оказывают значительное влияние географические условия и характер земной поверхности, включая различные природные и искусственные препятствия, такие, как холмы и пр., а также деревья и здания. По этой причине ВЭУ располагают, по возможности, на возвышенных и удаленных от высоких деревьев, жилых домов и других сооружений местах, т.к. такие препятствия снижают скорость ветра и приводят к завихрениям потока, затрудняющим преобразование энергии ветра.
Среднегодовая скорость ветра VС
характеризует ветровой потенциал территории. Это скорость ветра, которая определяется как среднее арифметическое значение всех наблюдаемых скоростей ветра в течение года. Средние скорости ветра могут быть вычислены и для других периодов, например: месячные, дневные, часовые.
Энергия, заключенная в ветре, находится в кубической зависимости от величины скорости ветра. Удвоение скорости ветра дает увеличение энергии в 8 раз. Таким образом, средняя скорость ветра 5 м/с может дать примерно в 2 раза больше энергии, чем ветер со средней скоростью 4 м/с.
Характеристики ветра измеряются на метеостанциях. На основе данных многолетних наблюдений скоростей ветра составляются специализированные карты ветров. [1]
Энергия ветра. Главной особенностью ветровой энергии является неравномерность ее проявления во времени и пространстве. Есть регионы, где средняя за год скорость ветра на высоте 10 м от уровня земли не превышает 3 м/с. Там нельзя рассчитывать на эффективную работу ветроустановок. Однако в стране имеется много мест, где возможность экономически выгодного использования энергии ветра не вызывает сомнений, но конкретный выбор участков для установки ВЭУ требует специального обоснования и проверки.
Кинетическая энергия Е, которой обладает воздушный поток, зависит от его массы m и скорости V может быть определена по формуле:
 (1.1) (1.1)
Если в формулу (1.1) подставить значение массы воздуха, протекающей через ветротурбину двигателя, то получим выражение для его мощности:
 (1.2) (1.2)
где ρ – плотность набегающего воздушного потока;
А0
– ометаемая ветротурбиной поверхность;
V0
– скорость набегающего воздушного потока.
К основным факторам, влияющим на точность оценки энергии ветра, относятся: изменение плотности воздуха в зависимости от высоты над уровнем моря и температуры и соответствие имеющихся данных по ветру ветровым условиям конкретного местоположения ветродвигателя.
Плотность воздуха на уровне моря при нормальных климатических условиях, соответствующих нормальному атмосферному давлению 760 мм рт. ст. и температуре +15 °С, равна ρ = 1,226 кг/м3
. В зависимости от высоты над уровнем моря плотность ρ изменяется, снижаясь почти на 10% при высоте 1 км и на 20% при высоте 2,5 км над уровнем моря, что приводит к соответствующему снижению потенциала ветровой энергии. При снижении температуры воздуха плотность ρ воздуха увеличивается, а при повышении – снижается. Так, при понижении температуры воздуха от нормального уровня (+15 о
С) на 25 °С (до -10 °С), плотность возрастает на 10%, а при повышении температуры на 25 о
С (до +40 °С) — плотность воздуха снижается приблизительно на 7,5%.
Скорость ветра Vi
на высоте Нi
, если она отличается от высоты, на которой производились измерения, определяется по формуле:
 (1.3) (1.3)
где m = 0,14 – степенной коэффициент для прибрежных зон Западной Европы.
Непрерывная регистрация измерений скорости ветра на метеостанциях в течение многих лет показала, что среднегодовые и средне меся иные значения скорости ветра в конкретном месте варьируют в узком диапазоне. Несмотря на то, что ветер – это случайный процесс, емy присущи определенные закономерности.
Кроме средней скорости ветра большое значение имеет распределение скоростей ветра во времени – частота повторяемости отдельных значений скоростей ветра. В последние 20 лет широкое применение во всем мире получило теоретическое распределение повторяемости скоростей по Вейбуллу, которое дает неплохое совпадение с результатами наблюдений. Дифференциальная повторяемость скоростей ветра по градациям по Вейбуллу ФV
имеет следующее выражение:
 (1.4) (1.4)
где V – градация скорости ветра;
β – параметр масштаба, численно близкий к величине среднего значения скорости ветра;
γ – параметр формы кривой распределения.

Рисунок 1.1 – Функция распределения скорости ветра (распределение плотности вероятности)
Чтобы получить значения параметров γ и β, достаточно иметь экспериментальные данные повторяемости скоростей ветра, желательно за возможно больший период наблюдений. Знание параметров распределения β и γ существенно повышает точность расчетов выработки энергии ВЭУ в конкретной местности.
1.2 Производство электроэнергии с помощью ветроэнергетических установок
Использование ветроустановок для производства электроэнергии является наиболее эффективным способом утилизации энергии ветра. Эффективность преобразования механической энергии в электрическую в электрогенераторе составляет обычно 95%, а потери электрической энергии при передаче не превышают 10%.
Из (1.2) видно, что энергия или мощность потока пропорциональна кубу скорости. Однако в механическую работу можно превратить только часть энергии потока, протекающего через ветротурбину. Другая часть энергии теряется на трение воздушных частиц и различные потери, так как ветротурбина оказывает сопротивление движению воздушных частиц. Кроме того, значительная часть энергии содержится в воздушном потоке, уже прошедшем через ветротурбину. Это объясняется тем, что поток за ветротурбиной также имеет некоторую скорость (рис.1.2).
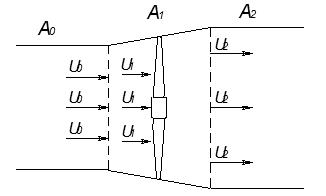
Рисунок 1.2 – Действие силы ветра на ветротурбину
На рис. 1.2 A1
– площадь, ометаемая ветротурбиной, А0
и А2
– площади поперечных сечений проходящего через ветротурбину ветрового потока соответственно до и за ним. Причем сечение А0
расположено за пределами возмущенной ветротурбиной области, а сечение А2
– в месте наименьшей скорости потока. Положение площади сечений А0
и А2
можно определить по результатам экспериментальных измерений поля скоростей в окрестности ветротурбины. Непосредственно в сечении А1
провести такие измерения невозможно из-за вращения ветротурбины.
Скорость потока за ветротурбиной не может быть равна нулю и наилучший режим работы ветродвигателя имеет место, когда скорость непосредственно за ветротурбиной составляет 2/3 от первоначальной скорости потока, набегающего на ветротурбину.
Число, показывающее, какая часть мощности воздушного потока полезно используется ветротурбиной, называется коэффициентом мощности или коэффициентом использования энергии ветра СР
.
Тогда мощность воздушного потока за ветротурбиной будет равна:
 (1.5) (1.5)
В лучших промышленных аэрогенераторах коэффициент мощности достигает 0,4. Коэффициент мощности СР
характеризует эффективность использования ветрогенератором энергии воздушного потока, проходящего через ометаемую ветротурбиной площадь А1
.
Предъявляемые при этом требования к частоте и напряжению вырабатываемой электроэнергии зависят от особенностей потребителей этой энергии. Эти требования жесткие при работе ветроустановок в рамках единой энергосистемы и достаточно мягкие при использовании энергии ВЭУ в осветительных и нагревательных установках. К настоящему времени разработано много проектов ветроэлектрических установок, включая и генераторы к ним, но в будущем с превращением ветроэнергетики в самостоятельную отрасль энергетики, несомненно, появятся принципиально новые конструкции ВЭУ.
При проектировании ветроэлектрических установок надо учитывать следующие их особенности:
1) для обеспечения максимальной эффективности работы ветроколеса следует изменять частоту его вращения при изменении скорости ветра, сохраняя постоянным коэффициент быстроходности, в то же время для максимально эффективной работы электрогенератора необходима практически постоянная частота вращения;
2) механические системы управления частотой вращения ветротурбины достаточно сложны и дороги. Гораздо эффективнее и дешевле управлять частотой его вращения, изменяя электрическую нагрузку электрогенератора;
3) оптимальная частота вращения ветротурбины тем меньше, чем больше его радиус, поэтому только очень малые ветроколеса (радиусом не более 2 м) удается соединять с генератором напрямую. При больших размерах ветротурбины приходится использовать повышающие редукторы, удорожающие ветроустановку и ее обслуживание. Альтернативой редукторам могут стать новые типы многополюсных генераторов, работающих при меньших частотах вращения;
4) в конструкции ветроэлектрической установки предусматривается, как правило, возможность отключения генератора от ветротурбины и вращения его от химического или механического аккумулятора энергии, поэтому систему управления генератором не связывают с работой ветротурбины. При отсутствии такой связи даже при “мягком” соединении генератора с ветротурбиной необходимы специальные демпфирующие устройства, дли того чтобы исключить механические удары, перегрузки и броски напряжений на выходе генератора.
Кроме того, следует учитывать специфические требования, предъявляемые к выходным параметрам ВЭУ. а именно:
а) наиболее благоприятные ветровые условия существуют, как правило, в малонаселенных районах, на островах и в море. Требования к электроэнергии в таких районах весьма специфичны, но почти наверняка ее здесь требуется гораздо меньше, чем в развитых промышленных районах;
б) анализ парка потребителей электроэнергии показывает, что лишь 5 – 10% из них предъявляют определенные требования к ее параметрам (например, к частоте). Это в основном электродвигатели, электронные устройства и осветительные установки. Поэтому целесообразно так строить систему электроснабжения, чтобы она могла обеспечивать потребителей как дешевой электроэнергией с нестабилизированными параметрами (например, для отопления), так и относительно дорогой, но со стабильными параметрами;
в) энергосистемы в сельской местности обычно маломощные и относительно низковольтные (менее 33 кВ), при передаче энергии на большие расстояния возникает много проблем, связанных с ее потерями, поэтому подключение ВЭУ к таким системам нецелесообразно;
г) так как периоды безветрия неизбежны, то для исключения
перебоев в электроснабжении ВЭУ должны иметь аккумуляторы
энергии или быть запараллеленными электроэнергетическими установками других типов.
Совершенно очевидно, что развитие ветроэнергетики будет стимулировать прогресс во всей электроэнергетике.
1.3 Классификация ВЭУ
Современные ВЭУ – это комплекс взаимосвязанного оборудования и сооружений, которые преобразуют энергию ветра в механическую энергию вращающейся ветротурбины, а затем в электрическую энергию.
Основными классификационными признаками структур ВЭУ являются:
- соотношение мощности ВЭУ и мощности энергосистемы;
- тип применяемой ветротурбины;
- тип применяемой электромашины.
1.3.1 Классификация по соотношению мощности ВЭУ и мощности энергосистемы
Согласно этой классификации ВЭУ делятся на три класса.
Класс А. К этому классу относятся ВЭУ, неподключенные к единой энергосистеме. В зависимости от применения, такие ВЭУ обычно комплектуются небольшими аккумулирующими (электроаккумулирующими) устройствами. Частота выходного напряжения, как правило, не стабилизирована. Они применяются в основном для освещения, электропитания сигнальных устройств и средств связи. Мощность таких ВЭУ не более 5 – 10 кВт.
Класс В. Мощность этих ВЭУ соизмерима с мощностью сети. Как правило, такие ВЭУ входят в состав локальных энергосистем отдельных районов, например, островных, отрезанных от основной энергосистемы естественными препятствиями: морем, болотистой местностью и т. д. Наиболее экономично в этом случае комбинированное применение ВЭУ с дизельэлектростанциями. При этом ВЭУ рассматриваются как средство экономии дизельного топлива. Параметры выходного напряжения в таких системах достаточно стабильны. В системах класса В более эффективно применение больших аккумулирующих устройств и сооружений, таких как водородные аккумуляторы и небольшие гидроаккумулирующие станции.
Класс С. Мощность сети значительно превышает установленную мощность ВЭУ. Такие ВЭУ относятся к системной ветроэнергетике. Они способны оказать влияние на состояние энергетического баланса большого региона или даже страны. В классе С целесообразно применение ВЭУ с установленной мощностью от 100 кВт до нескольких мегаватт. При этом обостряются проблемы, связанные с геометрическими размерами, возникают напряженные режимы работы механических частей.
В этом классе возможно достижение наилучших технико-экономических показателей. При случайном характере скорости ветрового потока и потребления электрической энергии необходимо соблюдение баланса мощности. В классах А и В для этой цели необходимы аккумулирующие, либо дополнительные генерирующие устройства, а их стоимость соизмерима со стоимостью ВЭУ. В классе С баланс мощности осуществляется за счет энергосистемы, что значительно экономичнее. Таким образом, наименьшей удельной стоимости ВЭУ можно достичь именно на пути развития системной ветроэнергетики.
1.3.2 Классификация по типу применяемой ветротурбины
В настоящее время применяются две основные конструкции ветроагрегатов (рис. 1.3): горизонтально-осевые и вертикально-осевые ветродвигатели. Оба типа ВЭУ имеют примерно равный КПД, однако наибольшее распространение получили ветроагрегаты первого типа. Мощность ВЭУ может быть от сотен ватт до нескольких мегаватт.

Рисунок 1.3 – Основные виды ветродвигателей
В состав ветродвигателя обоих типов входят следующие основные части:
- ветроколесо (ветротурбина, ротор) – преобразующее энергию набегающего ветрового потока в механическую энергию вращения оси турбины. Диаметр ветроколеса колеблется от нескольких метров до нескольких десятков метров. Частота вращения составляет от 15 до 100 об/мин. Обычно для соединенных с сетью ВЭУ частота вращения ветроколеса постоянна. Для автономных систем с выпрямителем и инвертором – обычно переменная. Ветроколесо содержит лопасти, которые закрепляются в ступице ветроколеса;
- мультипликатор (редуктор) – промежуточное звено между ветроколесом и электрогенератором, который повышает частоту вращения вала ветроколеса и обеспечивает согласование с оборотами генератора. Исключение составляют ВЭУ малой мощности со специальными генераторами на постоянных магнитах; в таких ветроустановках мультипликаторы обычно не применяются;
- башня или мачта (ее иногда укрепляют стальными растяжками) – служит для размещения головки с ветроколесом и мультипликатора на ветер на некоторой высоте относительно уровня земли, что необходимо для производительной работы ветродвигателя и соблюдения требований техники безопасности. У ВЭУ большой мощности высота башни достигает 75 м. Обычно это цилиндрические мачты, хотя применяются и решетчатые башни;
- основание (фундамент) – предназначено для предотвращения падения установки при сильном ветре. [1]
Ветротурбина с горизонтальной осью (рис. 1.4, а). Рассмотрим горизонтально-осевые ветротурбины пропеллерного типа. Основной вращающей силой у колес этого типа является подъемная сила. Относительно ветра ветроколесо в рабочем положении может располагаться перед опорной башней или за ней. При переднем расположении ветротурбина должно иметь аэродинамический стабилизатор или какое-либо другое устройство, удерживающее его в рабочем положении. При заднем расположении башня частично затеняет ветроколесо и турбулизирует набегающий на него поток. При работе колеса в таких условиях возникают циклические нагрузки, повышенный шум и флуктуации выходных параметров ветроустановки. Направление ветра может изменяться довольно быстро, и ветроколесо должно четко отслеживать эти изменения. Поэтому в ВЭУ мощностью более 50 кВт для этой цели используются электрические серводвигатели.

а)

б)
Рисунок 1.4 – Классификация ветротурбин: а) – с горизонтальной осью; б) – с вертикальной осью: 1 – однолопастное колесо; 2 – двухлопастное; 3 – трехлопастное; 4 – многолопастное; 5 – ротор Савониуса; 6 – ротор Дарье
В ветроэлектрогенераторах обычно используются двух- и трехлопастные ветротурбины (рис.1.4), последние отличаются очень плавным ходом. Электрогенератор и редуктор, соединяющий его с ветроколесом, расположены обычно на верху опорной башни в поворотной головке, В принципе их удобнее размешать внизу, но возникающие при этом сложности с передачей крутящего момента обесценивают преимущества такого размещения. Многолопастные колеса, развивающие большой крутящий момент при слабом ветре, используются для перекачки воды и других целей, не требующих высокой частоты вращения ветрового колеса.
Ветроэлектрогенераторы с вертикальной осью (рис. 1.4, б). Ветроэлектрогенерагоры с вертикальной осью вращения вследствие своей геометрии при любом направлении ветра находятся в рабочем положении. Кроме того, такая схема позволяет за счет только удлинения вала установить редуктор с генераторами внизу башни.
Принципиальными недостатками таких установок являются: 1) гораздо большая подверженность их усталостным разрушениям из-за более часто возникающих в них автоколебательных процессов; 2) пульсация крутящего момента, приводящая к нежелательным пульсациям выходных параметров генератора. Из-за этого подавляющее большинство ветроэлектрогенераторов выполнено по горизонтально-осевой схеме, однако исследования различных типов вертикально-осевых установок продолжаются. [4]
Промышленностью выпускаются ветродвигатели двух типов: тихоходные многолопастные и быстроходные малолопастные. Отличительной особенностью тихоходных многолопастных ветродвигателей является способность их трогаться с места, т. е. начинать работать с подключенной нагрузкой при сравнительно слабом ветре, что объясняется наличием большого крутящего момента. Эти двигатели хорошо используют малые скорости ветров, но плохо поддерживают постоянное число оборотов, поэтому они не могут применяться там, где требуется постоянство числа оборотов, как, например, для электроосвещения, но хорошо работают на приводе поршневых насосов с постоянным включением нагрузки. Из-за громоздкости ветроколеса тихоходные ветродвигатели не могут быть изготовлены мощными.
Второй тип ветродвигателей – это быстроходные малолопастные, имеющие ветроколесо с 2 – 3 лопастями. Они могут быть больших размеров и мощностей, вплоть до ветроколеса диаметром в 50 м. Благодаря возможности сравнительно хорошего регулирования числа оборотов эти двигатели, применяются для электрификации и механизации. Кроме того, выпускаются маломощные двигатели с диаметром ветроколеса от 1 до 3,5 м для освещения малых помещений и зарядки аккумуляторов. [5]
1.3.3 Классификация по типу применяемой электромашины
Еще одна из наиболее часто встречающихся классификаций, связана с типом применяемой электрической машины (рис.1.5).

Рисунок 1.5 – Классификация ВЭУ по типу применяемой электрической машины
1.4 Механические характеристики ветротурбин
Механическая характеристика ветротурбины – это зависимость величины развиваемого крутящего момента ветротурбины в функции быстроходности ветротурбины Z, определяемой как отношение величины окружной скорости конца лопасти радиусом R к действующему значению скорости ветра V
 (1.6) (1.6)
Исходными данными для построения механической характеристики ветротурбины является зависимость коэффициента мощности Ср
от быстроходности Z: Ср
= f(Z) (рис. 1.6).
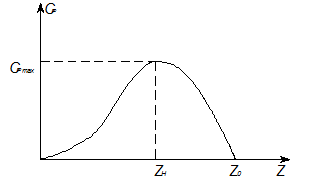
Рисунок 1.6 – Зависимость Ср
= f(Z)
Механическая характеристика ветротурбины, показанная на рис. 1.7, позволяет определить следующие параметры:
- Мпуск.
– значение пускового момента при угловой скорости ω = 0;
- Мmax
– максимальный момент ветротурбины при заданной скорости ветрового потока;
- Сmax
– соответствует режиму максимальной эффективности ветротурбины;
- ω0
– скорость холостого хода ветротурбины при отсутствии момента нагрузки на валу ветротурбины.

Рисунок 1.7 – Механическая характеристика ветротурбины
Необходимо отметить, что у большинства ветротурбин значение пускового момента отлично от нуля. Это означает, что при скорости ветрового потока выше номинальной, ветротурбина не может самостоятельно начать работать. Запустить в работу ВЭУ можно только путем предварительного разгона.
Семейство механических характеристик ветротурбины при постоянной геометрии ветротурбины (рис. 1.8) описывается выражением:
 (1.7) (1.7)
где ρ – плотность воздуха, кг/м3
;
VВ
– скорость ветрового потока, м/с;
АВТ
– эффективная площадь, ометаемая ветротурбиной, м2
;
 – коэффициент использования ветротурбины энергии ветра (коэффициент мощности); – коэффициент использования ветротурбины энергии ветра (коэффициент мощности);
 – быстроходность ветротурбины – быстроходность ветротурбины
При изменении скорости ветрового потока точки Мmax
и Сmax
образуют линии максимальных моментов и линию оптимального отбора мощности ветротурбины.

Рисунок 1.8 – Семейство механических характеристик ветротурбины
Быстроходность ветротурбин является, возможно, самым важным для их характеристики параметром, зависящим от трех основных переменных: радиуса ометаемой ветротурбиной окружности, его угловой скорости вращения и скорости ветра. Как безразмерная величина она является основным параметром подобия при исследовании и конструировании ветроэлектрогенераторов. [6]
1.5 Имитация поведения реальных ветротурбин
Экспериментальные характеристики ветродвигателей получают либо в аэродинамической трубе, где создается искусственный воздушный поток, либо в природных условиях в ветросиловой лаборатории с башней, оборудованной специальными приборами.
Экспериментальные характеристики ветродвигателей получают по инерционному методу Аэродинамического института. Этот метод основан на законе инерции вращающихся масс. Чтобы сообщить вращающемуся вокруг своей оси телу известное угловое ускорение, необходимо действие на это тело вращающегося момента, величина которого равна моменту инерции тела, в данном случае ветрового колеса. Относительно оси его вращения, умноженному на угловое ускорение, т. е.
 (1.8) (1.8)
где М – вращающий момент;
I – момент инерции вращающегося тела;
 – угловое ускорение. – угловое ускорение.
Таким образом, зная угловое ускорение в каждый данный момент времени и момент инерции модели вращающейся ветротурбины, можно определить крутящий момент М = Маэр
модели, вызванный внешними силами, т. е. воздушным потоком в аэродинамической трубе.
Определив для каждого момента времени значение угловой скорости ω, находят число модулей Z, которое соответствует полученному крутящему моменту ветряка Маэр
, затем строят характеристики Маэр
= f(Z) и ξ = f(Z).
Экспериментальные испытания реальных ветротурбин на башне в естественном ветровом потоке ценны и необходимы, потому что получаемые при этом результаты в наибольшей мере отражают работу ветродвигателей в эксплуатации. Воздушный поток в аэродинамической трубе действует на модель с постоянной по величине и направлению скоростью, в то время как ветровой поток, набегающий на ветротурбину в реальных условиях, изменяется и по скорости и по направлению. Кроме того, ветротурбины имеют различные детали на крыльях, поставленные с целью регулирования числа оборотов, и крепления, которые не всегда можно выполнить на модели.
Получение экспериментальных характеристик ветротурбин могут быть использованы для электромеханических систем имитирующих их поведение. Это позволит проводить испытания электрооборудования ВЭУ в лабораторных условиях в сжатые сроки без выезда на специализированные полигоны. Кроме того, система имитации позволит испытать поведение схем электрооборудования ВЭУ во всех возможных режимах. Адаптация системы имитации (имитатора) под конкретную ветротурбину подразумевает его реализацию на базе автоматизированного электропривода (АЭП) с перепрограммируемой микропроцессорной системой управления (МПСУ).
Обобщенная структурная схема ВЭУ приведена на рис. 1.9. АЭП имитатора должен реализовывать механические характеристики различных ветротурбин MД
= f(wД
, VВ
) с учетом мультипликатора (М) при заданных скоростях ветрового потока (ВП). При этом математическое описание параметров ВП может быть получена вероятностными методами.
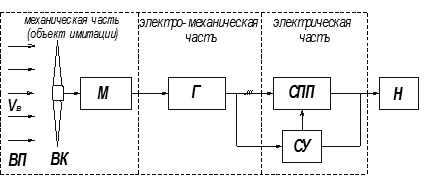
Рисунок 1.9 – Структурная схема ВЭУ
Одним из возможных направлений разработки АЭП имитатора является его реализация на базе привода постоянного тока (рис. 1.10). Одним из достоинств ДПТ является широкое и плавное регулирование скорости вращения, линейность и однозначность характеристик, отсутствие “самохода” (при снятии сигнала управления), быстродействие.

Рисунок 1.11 – Структурная схема АЭП имитатора ВТ
2 СИЛОВОЙ ПОЛУПРОВОДНИКОВЫЙ ПРЕОБРАЗОВАТЕЛЬ В СИСТЕМЕ ЭЛЕКТРОПРИВОДА ИМИТАТОРА
2.1 Структура электропривода
Электропривод – электромеханическая система, состоящая в общем случае из взаимодействующих электрических преобразователей, управляющих и информационных устройств и устройств сопряжения с внешними сопредельными электрическими, механическими, управляющими и информационными системами, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением в целях осуществления технологического процесса.
Базовым элементом любого электропривода является электрическая машина (электродвигатель), осуществляющая собственно электромеханическое преобразование энергии. Оснащение электропривода силовыми электронными преобразователями электрической энергии и микропроцессорными информационно-управляющими устройствами превращает его в мощный интеллектуальный инструмент автоматизации различных производственных и технологических процессов. Такой привод является регулируемым автоматизированным электроприводом.
Электропривод имеет два канала – силовой и информационный (рис. 2.1). По первому транспортируется преобразуемая энергия (широкие стрелки на рис. 2.1), по второму осуществляется управление потоком энергии, а также сбор и обработка сведений о состоянии и функционировании системы, диагностика ее неисправностей (тонкие стрелки на рис. 2.1).

Рисунок 2.1 – Общая структура электропривода
Силовой канал в свою очередь состоит из двух частей – электрической и механической и обязательно содержит связующее звено – электромеханический преобразователь.
В электрическую часть силового канала входят устройства электрический преобразователь ЭП, передающие электрическую энергию от источника питания (шин промышленной электрической сети, автономного электрического генератора, аккумуляторной батареи и т. п.) к электромеханическому преобразователю ЭМП и обратно и осуществляющие, если это нужно, преобразование электрической энергии.
Механическая часть состоит из подвижного органа электромеханического преобразователя, механических передач и исполнительного органа установки, в котором полезно реализуется механическая энергия. Электромеханический преобразователь ЭМП (электродвигатель), всегда присутствующий в электроприводе, преобразует электрическую энергию (U, I) в механическую (М, ω) и обратно.
Электродвигатели различают:
- по роду тока (постоянного, переменного);
- по количеству и схеме соединения обмоток;
- по конструктивному исполнению.
Наиболее распространенные электродвигатели:
- коллекторные двигатели постоянного тока (ДПТ) с независимым (параллельным), последовательным, смешанным возбуждением;
- двигатели переменного тока асинхронные с короткозамкнутым ротором АД КЗ, асинхронные с фазным ротором АД ФР, синхронные СД.
Электрическая машина работает в результате взаимодействия изменяющихся во времени магнитного поля (потока) и тока в контуре. Что изменяется, не важно:
- в ДПТ – неподвижный магнитный поток полюсов статора и движущаяся обмотка якоря с переменным током;
- в АД – вращающееся магнитное поле статора и вращающаяся, но с другой скоростью, обмотка ротора с током.
В ДПТ обмотки размещены на статоре и на роторе.
Статор ДПТ – индуктор с главными полюсами, на которых размещены обмотки возбуждения, создающие магнитный поток Ф. Здесь же могут быть размещены добавочные полюса и компенсационная обмотка, которые не участвуют в процессе электромеханического преобразования.
Ротор ДПТ – якорь с обмоткой якоря и коллектором. Токоподвод к обмотке якоря обеспечивает щеточный механизм. Коллектор является механическим преобразователем подводимого постоянного тока в переменный ток обмотки якоря.
Механический преобразователь (передача) – редуктор, пара винт-гайка, система блоков, кривошипно-шатунный механизм и т. п. осуществляет согласование момента М и скорости ω двигателя с моментом Мм
(усилием Fм
) и скоростью ωм
рабочего органа технологической машины.
Величины, характеризующие преобразуемую энергию, – напряжения, токи, моменты (силы), скорости называют координатами электропривода.
Основная функция электропривода состоит в управлении координатами, т. е. в их принудительном направленном изменении в соответствии с требованиями обслуживаемого технологического процесса.
Управление координатами должно осуществляться в пределах, разрешенных конструкцией элементов электропривода, чем обеспечивается надежность работы системы. Эти допустимые пределы обычно связаны с номинальными значениями координат, назначенными производителями оборудования и обеспечивающими его оптимальное использование.
Электропривод взаимодействует с системой электроснабжения или источником электрической энергии, с одной стороны, с технологической установкой или машиной, с другой стороны, и наконец, через информационный преобразователь ИП с информационной системой более высокого уровня, часто с человеком – оператором, с третьей стороны (рис. 2.1).
Можно считать, что электропривод как подсистема входит в указанные системы, являясь их частью. Действительно, специалиста по электроснабжению электропривод обычно интересует как потребитель электроэнергии, технолога или конструктора машин – как источник механической энергии, инженера, разрабатывающего или эксплуатирующего АСУ, – как развитый интерфейс, связывающий его систему с технологическим процессом или системой электроснабжения.
Практически все процессы, связанные с механической энергией, движением, осуществляются электроприводом. Исключение составляют лишь автономные транспортные средства (автомобили, самолеты, некоторые виды подвижного состава, судов), использующие неэлектрические двигатели. В относительно небольшом числе промышленных установок используется гидропривод, еще реже – пневмопривод.
Столь широкое, практически повсеместное распространение электропривода обусловлено особенностями электрической энергии – возможностью передвигать ее на любые расстояния, постоянной готовностью к использованию, легкостью превращения в любые другие виды энергии.
Сегодня в приборных системах используются электроприводы, мощность которых составляет единицы микроватт; мощность электропривода компрессора на перекачивающей газ станции – десятки мегаватт, т. е. диапазон современных электроприводов по мощности превышает 1012
. Такого же порядка и диапазон по частоте вращения: в установке, где вытягиваются кристаллы полупроводников, вал двигателя должен делать 1 оборот в несколько десятков часов при очень жестких требованиях к равномерности движения; частота вращения шлифовального круга в современном хорошем станке может достигать 150000 об/мин.
Но особенно широк диапазон применений современного электропривода: от искусственного сердца до шагающего экскаватора, от вентилятора до антенны радиотелескопа, от стиральной машины до гибкой производственной системы. Именно эта особенность – теснейшее взаимодействие с технологической сферой – оказывала и оказывает на электропривод мощное стимулирующее влияние. Непрерывно растущие требования со стороны технологических установок определяют развитие электропривода, совершенствование его элементарной базы, его методологии. В свою очередь, развивающийся электропривод положительно влияет на технологическую сферу, обеспечивает новые, недоступные ранее возможности.
С энергетической точки зрения электропривод – главный потребитель электрической энергии: сегодня в развитых странах он потребляет более 60% всей производимой электроэнергии. В условиях дефицита энергетических ресурсов это делает особенно острой проблему энергосбережения в электроприводе и средствами электропривода.
Специалисты считают, что сегодня сэкономить единицу энергетических ресурсов, например 1 т условного топлива, вдвое дешевле, чем ее добыть. Нетрудно видеть, что в перспективе это соотношение будет изменяться: добывать топливо становится всё труднее, а запасы его всё убывают.
Многообразие производственных процессов обусловливает различные виды и характеры движения рабочих органов машины, а следовательно, и электроприводов.
По виду движения электроприводы могут обеспечить: вращательное однонаправленное движение, вращательное реверсивное и поступательное реверсивное движения.
Вращательное однонаправленное, а также реверсивное движение осуществляется электродвигателями обычного исполнения. Поступательное движение может быть получено путем использования электродвигателя вращательного движения обычного исполнения совместно с преобразовательным механизмом (кулисным, винтовым, реечным и т. п.) либо применения электродвигателя специального исполнения для поступательного движения (так называемые линейные электродвигатели, магнитогидродинамические двигатели и др.).
По степени управляемости электропривод может быть:
1) нерегулируемый – для приведения в действие исполнительного органа рабочей машины с одной рабочей скоростью, параметры привода изменяются только в результате возмущающих воздействий;
2) регулируемый – для сообщения изменяемой или неизменяемой скорости исполнительному органу машины, параметры привода могут изменяться под воздействием управляющего устройства;
3) программно-управляемый – управляемый в соответствии с заданной программой;
4) следящий – автоматически отрабатывающий перемещение исполнительного органа рабочей машины с определенной точностью в соответствии с произвольно меняющимся задающим сигналом;
5) адаптивный – автоматически избирающий структуру или параметры системы управления при изменении условий работы машины с целью выработки оптимального режима.
Можно классифицировать электроприводы и по роду передаточного устройства. В этом смысле электропривод бывает:
1) редукторный, в котором электродвигатель передает вращательное движение передаточному устройству, содержащему редуктор;
2) безредукторный, в котором осуществляется передача движения от электродвигателя либо непосредственно рабочему органу, либо через передаточное устройство, не содержащее редуктор.
По уровню автоматизации можно различать:
1) неавтоматизированный электропривод, в котором управление ручное; в настоящее время такой привод встречается редко, преимущественно в установках малой мощности бытовой и медицинской техники и т. п.;
2) автоматизированный электропривод, управляемый автоматическим регулированием параметров;
3) автоматический электропривод, в котором управляющее воздействие вырабатывается автоматическим устройством без участия оператора.
Два последних типа электропривода находят применение в подавляющем большинстве случаев.
Наконец, по роду тока применяются электроприводы постоянного и переменного тока.
2.3 Основы механики электропривода
Самая простейшая механическая система, состоящая из ротора двигателя и непосредственно связанной с ним нагрузки – рабочего органа машины представлена рис. 2.2. Несмотря на простоту, система вполне реальна: именно так реализована механическая часть ряда насосов, вентиляторов, многих других машин.

Рисунок 2.2 – Модель механической части
К системе на рис. 2.2 приложены два момента – электромагнитный момент М, развиваемый двигателем, и момент Мс
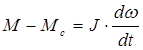
, создаваемый нагрузкой, а также потерями механической части (трение); каждый момент имеет свою величину и направление. Движение системы определяется вторым законом Ньютона:
 (2.1) (2.1)
где ω – угловая скорость,
J – суммарный момент инерции.
Правая часть уравнения (2.1) – динамический момент

Он возникает, если алгебраическая сумма моментов М и Мс
отлична от нуля; величина и знак динамического момента определяют ускорение.
Режимы, при которых ∑M = 0, т. е. моменты М и Мс
равны по величине и противоположно направлены, называют установившимися или статическими, им соответствует ω = const, в том числе ω= 0.
Режимы, когда ∑M ≠ 0 , называют переходными или динамическими (ускорение, замедление).
В уравнении (2.1) момент Мс
практически полностью определяется свойствами нагрузки, а момент М, который можно принять за независимую переменную, формируется двигателем. Скорость ω – зависимая переменная; ω(t) определяется в динамических режимах решением (2.1) для любых конкретных условий, а в статических режимах находится из условия:
 (2.2) (2.2)
2.4 Электроприводы постоянного тока
Для получения простейшей модели электропривода постоянного тока, описывающей установившиеся (статические) режимы и позволяющей получить основные характеристики, воспользуемся схемой на рис. 2.3.
Якорная цепь питается от независимого источника с напряжением U, сопротивление цепи якоря R постоянно, магнитный поток Ф определяется лишь током возбуждения и не зависит от нагрузки (реакция якоря не проявляется), индуктивные параметры цепей пока не учитываются, поскольку рассматриваются лишь установившиеся (статические) режимы.
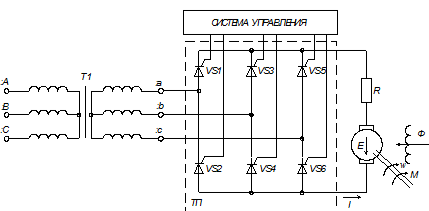
Рисунок 2.3 – Схема электропривода с двигателем постоянного тока
Взаимодействие тока I в обмотке якоря с магнитным потоком Ф, создаваемым обмотками, расположенными на полюсах машины, приводит в соответствии с законом Ампера и возникновению электромагнитных сил, действующих на активные проводники обмотки и, следовательно, электромагнитного момента М:
 (2.3) (2.3)
где k – конструктивный параметр машины.
В движущихся с угловой скоростью ω в магнитном поле под действием момента М проводниках обмотки якоря в соответствии с законом Фарадея наводится ЭДС вращения Е:
 (2.4) (2.4)
направленная в рассматриваемом случае встречно по отношению к вызвавшей движение причине – ЭДС источника питания U.
В соответствие со вторым законом Кирхгоффа для якорной цепи машины справедливо уравнение:
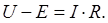 (2.5) (2.5)
Уравнения (2.3) – (2.5) – простейшая, но достаточная для понимания главных процессов в электроприводе постоянного тока модель. Для решения практических задач они должны быть дополнены уравнением движения с моментом потерь ∆M, входящим в Мс
:
 (2.6) (2.6)
и уравнениями цепи возбуждения для конкретной схемы электропривода.
Если существовал некоторый установившийся режим М1
= Мс1
, а затем Мс
изменился, например, возрос до величины Мс2
, то для получения нового установившегося режима необходимо иметь средство, которое изменило бы М, приведя его в соответствие с новым значением Мс
. В двигателе внутреннего сгорания эту роль выполнит оператор, увеличив подачу топлива; в паровой турбине – специальный регулятор, который увеличит подачу пара. В электрической машине эту роль выполнит ЭДС. Действительно, при возрастании Мс
скорость двигателя начнет снижаться, значит уменьшится и ЭДС (полагаем для простоты, что Ф, а также U и R – постоянные). Из (2.5) следует, что:
 (2.7) (2.7)
Следовательно, ток вырастет, обусловив тем самым рост момента в соответствии с (2.3). Двигатель автоматически, без каких-либо внешних воздействий перейдет в новое установившееся состояние. Эти процессы будут иметь место при любых величинах и знаках Мс
, т. е. ЭДС будет выполнять функцию регулятора как в двигательном, так и в тормозных режимах работы машины.
Режим и параметры электропривода определяют механическая характеристика ω(M) электродвигателя и механическая характеристика ω(Мс
) механизма, приведенная к валу электродвигателя.
Различают естественную и искусственные механические характеристики электродвигателей.
Естественная характеристика соответствует основной схеме включения и номинальным (паспортным) параметрам питающего напряжения. Естественная характеристика – единственная для данного двигателя.
Искусственные характеристики определяются схемой включения и параметрами питающего напряжения, отличными от номинальных. Их может быть множество – семейство.
Для получения уравнения механической характеристики необходимо найти зависимость скорости от момента двигателя. Это легко сделать, если учесть, что момент М, развиваемый двигателем, связан с током якоря и магнитным потоком зависимостью (2.3).
Если в (2.5) вместо Е подставим ее значение Е из (2.4), то получим уравнение для скорости двигателя:
 (2.8) (2.8)
Уравнение (2.8) представляет собой зависимость скорости двигателя от тока якоря. Такую зависимость ω=f(I) называют электромеханической характеристикой двигателя.
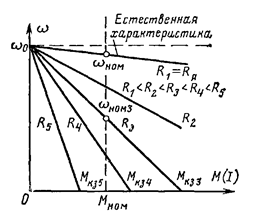
Рисунок 2.4 – Естественная характеристика и семейство реостатных механических характеристик двигателя постоянного тока независимого возбуждения
Подставив в (2.8) значение тока I, найденное из (2.3), получим выражение для механической характеристики:
 (2.9) (2.9)
Коэффициент k принимается постоянным, не зависящим от нагрузки, если у двигателя с независимым возбуждением имеется компенсационная обмотка. Он может считаться неизменным, если для обычных двигателей пренебречь реакцией якоря.
Механическая характеристика (рис. 2.4) двигателя при неизменных параметрах U, Ф и R представляется прямой линией. Изменяя тот или иной параметр механической характеристики, можно при определенном моменте сопротивления на валу двигателя получать различные скорости двигателя, т. е. регулировать скорость электропривода.
Как отмечалось выше, основная функция электропривода состоит в управлении его координатами – скоростью и моментом, т. е. в их принудительном направленном изменении в соответствии с требованиями технологического обслуживаемого процесса.
Очень важный частный случай управления координатами – регулирование скорости или момента, т. е. принудительное изменение этих величин в установившемся режиме в соответствии с требованиями технологического процесса посредством воздействия на механическую характеристику двигателя. Частным случаем регулирования является поддержание одной из координат на требуемом уровне при независимом изменении другой координаты.
Чаще всего регулируемой координатой служит скорость: необходимо изменять скорость транспортного средства в зависимости от условий движения, состояния дороги и т. п., нужно регулировать скорость насоса, чтобы обеспечивать нужный напор в системе водоснабжения, требуется поддерживать на заданном уровне скорость движения жилы кабеля в процессе наложения на нее изоляции и т. п.
Понятие “регулирование скорости”, когда используются разные характеристики (рис. 2.5, а), не следует смешивать с изменением скорости, даже значительным, которое вызывается ростом или снижением нагрузки и происходит в соответствии с формой данной механической характеристики (рис. 2.5, б).

Рисунок 2.5 – Регулирование (а) и изменение (б) скорости
В ряде случаев оказывается необходимым регулирование момента. Оно потребуется, например, если нужно качественно укладывать на катушку проволоку, получаемую с волочильного стана, если при буксировке судна на больших волнах надо не допустить обрыва троса и т. п. Далее мы будем, в основном, рассматривать регулирование скорости.
Поскольку регулирование скорости связано с направленным формированием механических характеристик, выделим одну из возможных характеристик в качестве основной. Обычно в качестве основной характеристики принимают естественную характеристику двигателя, соответствующую номинальным значениям определяющих ее величин (напряжение, частота, магнитный поток и т. п.).
Все другие характеристики, создаваемые в целях регулирования скорости, будем называть искусственными. Они могут формироваться разными способами, отличающимися как по техническим, так и по экономическим показателям, рассматриваемым ниже.
1. Направление регулирования. Искусственные характеристики, могут располагаться только ниже естественной – однозонное регулирование вниз от основной скорости, только выше естественной – однозонное регулирование вверх от основной скорости, как выше, так и ниже естественной – двухзонное регулирование.
2. Диапазон регулирования – отношение максимальной возможной скорости к минимальной

При заданных изменениях момента нагрузки (рис. 2.6). Одинаковым естественным характеристикам и изменениям момента ∆Mс
могут соответствовать сильно различающиеся диапазоны регулирования, что связано с жесткостью искусственных характеристик.

Рисунок 2.6 – К определению диапазона регулирования скорости
С жесткостью характеристик связан также еще один показатель – стабильность скорости на искусственных характеристиках. Она может быть низкая (рис. 2.6, а) и высокая (рис. 2.6, б); иногда требуется абсолютно жесткие характеристики (β = ∞), иногда, напротив, нужны очень мягкие характеристики (регулирование момента).
3. Плавность регулирования – возможность получать искусственные характеристики, расположенные как угодно близко друг к другу, – плавное регулирование или, наоборот, возможность иметь лишь несколько фиксированных характеристик – ступенчатое регулирование.
4. Допустимая нагрузка на искусственных характеристиках – очень важный показатель, определяющий надежность электропривода. Рассмотрим здесь лишь длительно допустимую нагрузку, которая определяется допустимым нагревом двигателя.
Допустимая нагрузка на естественной характеристике известна по определению – это номинальный момент двигателя Мн
. Для упрощения задачи будем считать, пренебрегая изменением теплоотдачи, допустимым током в силовых целях при любой скорости номинальный ток двигателя Iн
. Тогда допустимый момент для принудительно охлаждаемого двигателя:
 (2.10) (2.10)
будет зависеть от магнитного потока двигателя Ф на соответствующей искусственной характеристике. При регулировании с

Грубая оценка (2.10) дает лишь общее представление о допустимых нагрузках и должна уточняться в каждом конкретном случае.
5. Экономичность регулирования оценивается потерями энергии, сопровождающими тот или иной способ регулирования. Иногда экономичность удается грубо оценить, сравнивая полезную мощность  с потребляемой из сети Р1
, т. е. определяя потери ∆P или вычисляя КПД η в некоторой характерной точке: с потребляемой из сети Р1
, т. е. определяя потери ∆P или вычисляя КПД η в некоторой характерной точке:
 (2.11) (2.11)
Значительно более серьезные и убедительные оценки экономичности регулирования при сравнении различных способов могут основываться на цикловом КПД ηЦ
определяемом с учетом конкретных условий работы привода за время цикла tц
.
 (2.12) (2.12)
Электромеханическое преобразование энергии в ДПТ осуществляется в результате взаимодействия постоянного магнитного потока статора и переменного во времени, но неподвижного в пространстве тока якоря. Благодаря фиксированному положению щеточного механизма векторы потока Ф и тока якоря Iя
сдвинуты на постоянный угол  /2, что обеспечивает получение максимального момента М. /2, что обеспечивает получение максимального момента М.

Рисунок. 2.7 – Механические (электромеханические) характеристики электропривода постоянного тока независимого возбуждения
Анализ уравнений механической и электромеханической характеристик ДПТ показывает три возможных способа регулирования его скорости и момента:
- введение добавочного резистора Rдоб
в цепь якоря;
- изменение напряжения Uя
питания якорной цепи;
- изменение магнитного потока Ф путем регулирования тока возбуждения.
В различных по способу возбуждения ДПТ по разному проявляется зависимость магнитного потока от тока якоря Ф(Iя
) и соответствующим образом отличаются характеристики (рис. 2.7).
Различают однозонное регулирование вниз от основной скорости, однозонное регулирование вверх от основной скорости и двухзонное регулирование, когда имеется возможность получать характеристики выше и ниже естественной. [10]
Двигатель постоянного тока независимого возбуждения, который используется в имитационной установке, имеет две зоны регулирования (рис. 2.8). Зона I отвечает регулированию с постоянным моментом. Действительно, если регулирование осуществляется изменением сопротивления или напряжения главной цепи при неизменном номинальном магнитном потоке двигателя, то при номинальном токе якоря допустимый момент будет постоянным.

Рисунок 2.8 – Характеристики двух зон регулирования двигателя постоянного тока независимого возбуждения
 (2.13) (2.13)
Мощность на валу двигателя в этой зоне изменяется по линейному закону, так как она пропорциональна угловой скорости:
 (2.14) (2.14)
Зона II отвечает регулированию с постоянной мощностью, когда оно производится изменением магнитного потока двигателя.
В этом случае при неизменном токе якоря, равном номинальному, магнитный поток с увеличением угловой скорости необходимо регулировать по закону гиперболы. Если решить это уравнение относительно магнитного потока, то получим:
 (2.15) (2.15)
Таким образом, становится явной зависимость допустимого момента от угловой скорости в зоне регулирования II, а именно:
 (2.16) (2.16)
Отсюда следует, что мощность в этой зоне регулирования остается постоянной, так как:
 (2.17) (2.17)
Требования высокой точности регулирования и высокого быстродействия, которые предъявляются к современному электроприводу, обуславливают применение замкнутых систем. Только замкнутые системы позволяют осуществить реализацию в электроприводе двух основных принципов:
1. Регулируемая величина на выходе электропривода (скорость, угол, момент и т. д.) должна по возможности точней повторять задающий (входной) сигнал.
2. Регулируемая величина на выходе электропривода по возможности не должна зависеть от возмущающих воздействий на электропривод. Такими возмущающими воздействиями могут быть напряжение питания, температура, момент нагрузки, временные зависимости параметров и т. д.
Поэтому основным принципом управления является принцип обратной связи, позволяющий осуществить контроль качества регулирования по отклонению управляемого параметра от заданного. Каждый элемент функциональной схемы электропривода описывается в статике и динамике передаточной функцией.
В электроприводе в основном применяются три структуры построения:
- с промежуточным суммирующим элементом;
- с независимым регулированием параметров;
- с подчиненным регулированием.
Наибольшее применение получили два типа построения замкнутых систем регулирования:
1) с одним общим суммирующим усилителем (рис. 2.9, а);
2) с n последовательными суммирующими усилителями (рис. 2.9, б) – системы подчиненного регулирования с последовательной коррекцией.

Рисунок 2.9 – Структурные схемы замкнутых систем регулирования: а) с общим суммирующим усилителем; б) с n последовательными суммирующими усилителями
Отличительной особенностью систем построенных по типу структурной схемы, приведенной на рис. 2.9, а, является наличие одного суммирующего усилителя (У), на вход которого подается алгебраическая сумма сигнала задающего и всех обратных связей жестких и гибких (суммирование может быть как электрическое, так и магнитное). Выходной сигнал усилителя, таким образом, зависит сразу от нескольких переменных, что делает практически невозможным регулирование какой-то одной переменной независимо от других.
Для разделения действия обратных связей применяют отсечки (блоки нелинейностей БН1, БН2). Но и в этом случае единственный (общий для всех обратных связей) задающий сигнал не определяет заданного значения выбранной для регулирования переменной. Придание системе требуемых динамических свойств при таком построении системы обычно достигается применением сложных корректирующих устройств, включаемых в цепь сигнала управления при малой мощности управления (блок БК1 – последовательная коррекция) или параллельно некоторым блокам системы (параллельная коррекция – гибкая отрицательная обратная связь, блок БК2). При этом нельзя осуществить независимую настройку качества регулирования всех переменных. В целом получить требуемое высокое или оптимальное качество регулирования в таких системах крайне затруднительно, а в ряде случаев и невозможно.
Но несмотря на указанные недостатки, системы, построенные по типу структурной схемы, приведенной на рис. 2.9, а, находили и еще находят широкое применение либо из-за простоты реализации при использовании громоздких электромашинных, силовых магнитных и электронно-ламповых усилителей, либо в случаях, когда не предъявляются жесткие требования к качеству переходных процессов и не требуется раздельное регулирование переменных, либо когда относительно простыми средствами удается достигнуть требуемого качества процессов.
С появлением малогабаритных и относительно дешевых полупроводниковых, в частности интегральных операционных усилителей и тиристорных преобразователей с малой мощностью управления открылась возможность строить системы подчиненного регулирования с последовательной коррекцией, в которых используется n последовательных суммирующих усилителей (рис. 2.9, б). На эти усилители возлагаются функции не только суммирования и усиления сигналов, но и выполнения некоторых других математических операций над сигналами, поэтому суммирующие усилители в этих системах называют регуляторами.
Система подчиненного регулирования (см. рис. 2.9, б) состоит из ряда контуров, число которых равно числу регулируемых переменных (или числу больших постоянных времени системы, подлежащих компенсации), причем каждый внутренний контур регулирования подчинен следующему по порядку внешнему (по отношению к внутреннему) контуру. Эта подчиненность выражается в том, что заданное значение регулируемой переменной любого внутреннего контура определяется выходным сигналом регулятора следующего по порядку контура. В результате все внутренние контуры работают как подчиненные задаче регулирования выходной координаты системы. Каждый контур строится по принципу регулирования по отклонению (по ошибке) и имеет свою обычно жесткую отрицательную обратную связь по регулируемой переменной и свой регулятор (суммирующий усилитель). Для каждого внешнего контура внутренний контур (или несколько внутренних контуров) входит в состав объекта регулирования.
Показанная на рис. 2.9, б структура системы привода постоянного тока с двигателем независимого возбуждения имеет два контура регулирования: первый (внутренний) контур – контур регулирования тока якоря двигателя, содержащий регулятор тока РТ, преобразователь П, якорную цепь двигателя и жесткую отрицательную обратную связь по току якоря с коэффициентом передачи k1
; второй (контур внешний, которому подчинен первый контур) – контур регулирования угловой скорости двигателя, содержащий регулятор скорости PC, первый контур, двигатель М и жесткую отрицательную обратную связь по скорости с коэффициентом передачи kω
. Задающим сигналом для второго контура является сигнал задания угловой скорости UЗ,C
, а для первого — сигнал с выхода регулятора скорости UЗ,Т
.
В системе подчиненного регулирования появляется возможность раздельного регулирования переменных и раздельной настройки контуров (начиная с первого, самого внутреннего контура) и коррекции переходных процессов в каждом контуре, что существенно упрощает как расчетную работу, так и техническую реализацию коррекции и практическую (в наладке) настройку системы.
2.7 Электромеханическая система имитатора ВТ на базе электропривода постоянного тока
Экспериментальный стенд имитатора ветротурбины представляет собой автоматизированный электропривод постоянного тока. Структурная схема автоматизированного электропривода постоянного тока представлена на рис. 2.10, который состоит из: трансформатора (Тр), питающегося от сети, трехфазного мостового управляемого выпрямителя (УВ), сглаживающего фильтра (Ф), электродвигателя (ЭД), датчика тока (ДТ), датчика скорости (ДС), системы управления (СУ) и нагрузкой. Нагрузкой является система электрооборудования ВЭУ (ЭО ВЭУ). УВ создает на валу ЭД механический момент подобный механическому моменту реальной ветротурбины согласно (2.9); а СУ, на основе текущего состояния системы, вычисляет момент задания Мз
и осуществляет управление УВ имитатора с целью реализации этого задания.
Данная схема построена по системе подчиненного регулирования.

Рисунок 2.10 – Структурная схема автоматизированного электропривода постоянного тока имитатора ВТ
Благодаря ортогональности двух моментообразующих составляющих – тока якоря и магнитного потока, управление ДПТ однозначно и просто реализуемо: два независимых регулятора в цепи якоря и в цепи возбуждения. Наиболее эффективны для этой цепи силовые полупроводниковые преобразователи (СПП) – тиристорные выпрямители.
Именно простотой процесса управления и наличием технических средств управления (электромеханические, ионные, а затем полупроводниковые преобразователи) обусловлено преимущественное применение регулируемых электроприводов постоянного тока. При том, что ДПТ из-за наличия коллектора и щеточного узла значительно дороже и сложнее в эксплуатации, чем двигатели переменного тока.
Основной схемой преобразования в электроприводе является трехфазная мостовая (обоснование выбора такой схемы описано в разделе 3).
Преимущества УП, выполненных таким образом, – отсутствие вращающихся машин, не требуют обслуживания, имеют высокое быстродействие. Недостатки – низкий коэффициент мощности сosα ≈ cosφ, искажение напряжения питающей сети, трудно компенсируемое при значительных мощностях, необходимость в двух комплектах вентилей для работы в четырех квадрантах, необходимость в сглаживающих и уравнительных реакторах, утяжеляющих конструкцию. [9]
Система тиристорный преобразователь-двигатель (система ТП-Д) является штатным техническим решением практически везде, где используется электропривод постоянного тока. Схема электрическая принципиальная системы тиристорный преобразователь - ДПТ независимого возбуждения представлена на рис. 2.11. Для питания цепи обмотки возбуждения ДПТ применяется однофазный мостовой выпрямитель, выполненный на диодах.

Рисунок 2.11 – Схема электрическая принципиальная системы управляемый выпрямитель – двигатель постоянного тока независимого возбуждения
2.7.1 Электромагнитные процессы в СПП электропривода имитатора ветротурбины
При рассмотрении механических характеристик предполагалось, что преобразователь всегда работает в режиме непрерывного выпрямленного тока (тока якорной цепи) – диаграмма тока на рис. 2.12, а. Фактически же при малых моментах нагрузки на валу двигателя в кривой выпрямленного тока i появляются разрывы и ток становится прерывистым (рис, 2.12, в). Рисунок 2.12, б относится к граничному случаю.

Рисунок 2.12 – Диаграммы выпрямленного напряжения и тока при различных режимах: а) – непрерывный; б) – граничный; в) – прерывистый
Цепь выпрямленного тока содержит активные сопротивления Rя
(якорной цепи двигателя и сглаживающего дросселя) и Rtp
(трансформатора), а также соответствующие индуктивности Lя
и Lтр
. Пренебрежем для. простоты значениями Rтр
и Lтр
. Тогда кривая мгновенных значение выпрямленного напряжения Ud
на выходе преобразователя будет определяться отрезками синусоид фазовых ЭДС трансформатора (рис. 2.12, а в), т. е. Ud
= ed
.
При указанных допущениях на участке работы одного вентиля преобразователя для цепи выпрямленного тока справедливо следующее уравнение электрического равновесия:
 (2.18) (2.18)
где Е – ЭДС якоря, которую за время работы одного вентиля можно считать постоянной;
 – скорость изменения мгновенного значения выпрямленного тока; – скорость изменения мгновенного значения выпрямленного тока;
 – ЭДС самоиндукции, наводимая в обмотках якоря двигателя и сглаживающего дросселя. – ЭДС самоиндукции, наводимая в обмотках якоря двигателя и сглаживающего дросселя.
В соответствии с уравнением (2.18) на рис. 2.12, а – в построены диаграммы изменения во времени тока и напряжений силовой цепи преобразователь — двигатель.
В режиме непрерывного тока (рис. 2.12, а) после открывания очередного вентиля он воспринимает весь ток нагрузки (Iнач
, поскольку ed
> Е). Далее ток I возрастает до тех нор, пока ed
станет больше суммы  . При этом . При этом

А ЭДС самоиндукции направлена навстречу току и определяется согласно уравнению (2.18) как:
  (2.19) (2.19)
По мере уменьшения разницы между ed
и Е скорость возрастания тока  и ЭДС самоиндукции уменьшаются и становятся равными нулю в точке а, в которой и ЭДС самоиндукции уменьшаются и становятся равными нулю в точке а, в которой  . Начиная с этой точки . Начиная с этой точки  , а затем и , а затем и  . Следовательно, после точки а ток I будет уменьшаться и . Следовательно, после точки а ток I будет уменьшаться и  , но при этом ЭДС самоиндукции изменит свой знак и, складываясь с ed
, обеспечит протекание тока в прежнем направлении, поскольку , но при этом ЭДС самоиндукции изменит свой знак и, складываясь с ed
, обеспечит протекание тока в прежнем направлении, поскольку  . При больших значениях момента нагрузки на валу двигателя, т. е. при больших средних значениях I выпрямленного тока, электромагнитной энергии, запасенной в индуктивности Lя
при , оказывается достаточно для того, чтобы при отдаче этой энергии на участке . При больших значениях момента нагрузки на валу двигателя, т. е. при больших средних значениях I выпрямленного тока, электромагнитной энергии, запасенной в индуктивности Lя
при , оказывается достаточно для того, чтобы при отдаче этой энергии на участке  сохранить к концу интервала проводимости вентиля 2π/q*m значение тока i = iнач
. Затем вступит в работу следующий вентиль и т. д. сохранить к концу интервала проводимости вентиля 2π/q*m значение тока i = iнач
. Затем вступит в работу следующий вентиль и т. д.
С уменьшением нагрузки двигателя угловая скорость его и ЭДС Е возрастают, а средний ток I и значение iнач
уменьшаются. Наконец, при токе I = Iгр
наступает такой режим, когда длительность протекания тока через вентиль по-прежнему остается равной 2π/q*m; но в начале и в конце интервала проводимости i = 0. Такой режим называется граничный (рис. 2.12, б).
В режиме непрерывного тока среднее значение выпрямленной ЭДС Еп
определяется при α = const выражением:
 (2.20) (2.20)
Дальнейшее уменьшение нагрузки на валу двигателя приводит к тому, что скорость и ЭДС Е двигателя при том же значении α еще более возрастают, а ток I становится меньше Iгр
. В этом случае электромагнитной энергии, запасаемой в индуктивности Lя
при , будет недостаточно для поддержания тока в течение всего интервала 2π/q*m, и ток i принимает нулевое значение раньше, чем откроется очередной вентиль (рис. 2.12, в). Ток становится прерывистым. В этом режиме в течение промежутка 2π/q*m–λ ток равен нулю. При этом напряжение на выходе преобразователя равно ЭДС двигателя Е, а вращение двигателя поддерживается за счет энергии, запасенной в движущихся массах привода.
Влияние режима прерывистого тока сводится к увеличению среднего значения выпрямленного напряжения на нагрузке по сравнению с режимом непрерывного тока. При уменьшении тока нагрузки ЭДС двигателя стремится к максимальному значению выпрямленной ЭДС edmax
, которая зависит от угла регулирования α. В режиме прерывистого тока двигатель ведет себя как конденсатор, запасая энергию на участках, где протекает ток, и расходуя ее, когда ток равен нулю.
Ширина зоны прерывистых токов, т. е. значение Iгр
, зависит от суммарной индуктивности цепи выпрямленного тока Lя
+ Lтр
и угла α:
 (2.21) (2.21)
Обычно благодаря наличию сглаживающего дросселя зона прерывистых токов, особенно для многофазных схем выпрямления, достаточно мала. В большинстве случаев значение Iгр
max
при α = 90o
меньше, чем минимальный ток Imin
эксплуатационной нагрузки двигателя.
3 РАСЧЕТ СИЛОВОГО БЛОКА ИМИТАТОРА ВТ
Необходимо спроектировать выпрямитель для обеспечения управления двигателем постоянного тока типа П42 с током не более номинального тока якоря и обеспечить длительную работу с номинальным моментом (током) при номинальной скорости вращения с постоянным потоком возбуждения. Параметры двигателя: Рн
= 7400 кВт, Uян
= 257 В, nн
= 3000 об/мин. Допустимые пульсации тока якоря не более 7 % Id
н
. Обмотка возбуждения UB
= 220 В. Требуется определить параметры сетевого трансформатора, параметры вентилей выпрямителей якорной цепи и обмотки возбуждения, параметры сглаживающих дросселей выпрямителей.
Проектирование нового выпрямителя содержит два качественно различных этапа.
1. Этап структурного синтеза, на котором определяется структура (принципиальная схема) выпрямителя.
2. Этап параметрического синтеза, на котором рассчитываются параметры элементов выбранной структуры (принципиальной схемы) выпрямителя. [13]
3.1 Выбор схемы выпрямителя (этап структурного синтеза)
Формальных (математических) методов синтеза структур вентильных преобразователей по требованию задания пока в силовой электронике практически нет, хотя исследования в этом направлении проводятся. Поэтому процедура синтеза схемы выпрямителя сводится к процедуре ее выбора из множества известных на основании знания их свойств. Таким образом, необходима база данных по схемам выпрямителей. В тех случаях, когда не удается выбрать подходящую схему выпрямителя из числа известных, потребуется или изобретение новой схемы, или корректировка задания на проектирование выпрямителя.
На рис. 3.1 дан пример алгоритма выбора схемы выпрямителя исходя из трех заданных параметров выхода выпрямителя (Pd
0
, Ud
0
, Id
) с учетом в векторе свойств схемы только двух компонентов: использования типовой мощности трансформатора и использования вентилей по обратному напряжению.

Рисунок 3.1 – Алгоритм выбора схемы выпрямителя
В соответствии с заданием на проектирование и алгоритмом выбора схемы выпрямителя по рис. 3.1 наш выпрямитель должен быть трехфазным (Pd
0
= 7400 кВт) и двухполупериодным (мостовая схема), так как требуется достаточно высокое выпрямленное напряжение. Выпрямитель обмотки возбуждения также трехфазный, но в связи с невысоким значением выпрямленного напряжения может быть выполнен по однополупериодной схеме. Поскольку коэффициенты преобразования по напряжению выбранных схем выпрямителей различаются в два раза и их требуемые выпрямленные напряжения также различаются в два раза, возможен вариант питания обеих схем от одной системы вторичных обмоток трансформатора.
3.2 Расчет параметров элементов схемы управляемого выпрямителя (этап параметрического синтеза)
На рис. 3.2 представлена упрощенная схема трехфазного мостового управляемого выпрямителя для расчета параметров основных элементов.

Рисунок 3.2 – Упрощенная схема трехфазного управляемого выпрямителя
Напряжение питающей сети по стандарту на качество электрической энергии может максимально отклоняться от номинала до ±10%. Поэтому необходимо обеспечить номинальное выпрямленное напряжение и при минимально возможном напряжении сети, при этом угол регулирования α в выпрямителе рационально иметь равным нулю. Тогда, учитывая, что Uя.н.
= Ud
0
, имеем:
 (3.1) (3.1)
полагая, что обмотки трансформатора будут соединены по схеме звезда звезда и коэффициент трансформации входного трансформатора:
 (3.2) (3.2)
Среднее значение анодного тока вентиля:
 (3.3) (3.3)
Действующее значение анодного тока вентиля:
 (3.4) (3.4)
Выбираем тиристор по среднему значению анодного тока с учетом того, что здесь коэффициент амплитуды Ка
=2, а рабочее обратное напряжение должно выбираться по формуле:
 (3.5) (3.5)
где  – расчетное обратное напряжение, равное амплитуде линейной Э.Д.С. трансформатора при максимальном напряжении питающей сети; – расчетное обратное напряжение, равное амплитуде линейной Э.Д.С. трансформатора при максимальном напряжении питающей сети;
ККП
=1,4 – коэффициент, учитывающий наличие коммутационных перенапряжений;
КЗ
=1,1 – коэффициент запаса;
Кр
=0,8 – коэффициент рекомендуемого соотношения между рабочим и допустимым повторяющимся напряжением на вентиле.
Это тиристор Т132-50, имеющий следующие параметры: динамическое сопротивление в открытом состоянии – Rдин
= 4,6 мОм, пороговое напряжение – U0
= 1,03 В, максимально допустимая температура перехода – Тjm
=125 о
С. [15] Действующее значение вторичного тока трансформатора:
 (3.6) (3.6)
Действующее значение первичного тока трансформатора:
 (3.7) (3.7)
Расчетная мощность обмоток трансформатора:
 (3.8) (3.8)
По справочным данным выбираем трансформатор типа ТСЗ-10/0,38. который имеет следующие параметры:
- номинальная мощность S = 10 кВА;
- номинальная частота f = 50 Гц;
- потери холостого хода Рх.х.
= 650 Вт;
-потери короткого замыкания Рк.з.
= 250 Вт;
- ток холостого хода Iх.х.
= 7,5%;
- напряжение короткого замыкания Uк.з
= 3,5%.
Через эти параметры трансформатора определим нужные нам параметры элементов Т-образной схемы замещения трансформатора.
Модуль полного сопротивления короткого замыкания трансформатора:
 (3.9) (3.9)
Активное сопротивление обмоток трансформатора, приведенное к первичной стороне:
 (3.10) (3.10)
Реактивное сопротивление рассеивания обмоток трансформатора, приведенное к первичной стороне:
 (3.11) (3.11)
Тогда то же сопротивление, приведенное ко вторичным обмоткам трансформатора и называемое уже анодным сопротивлением Ха
, будет равно:
 (3.12) (3.12)
 (2.13) (2.13)
3.2.1 Проверка вентилей по тепловому режиму
Проверяем тепловой режим выбранного вентиля по усредненной температуре полупроводниковой структуры:
 (3.14) (3.14)
где  – температура полупроводниковой структуры в стационарном режиме, о
С; – температура полупроводниковой структуры в стационарном режиме, о
С;
 – температура окружающей среды, 40 о
С; – температура окружающей среды, 40 о
С;
 – тепловое сопротивление прибора и охладителя для выбранных условий охлаждения, о
С/Вт; – тепловое сопротивление прибора и охладителя для выбранных условий охлаждения, о
С/Вт;
 – мощность потерь в вентиле, Вт; – мощность потерь в вентиле, Вт;
 – максимально допустимая температура полупроводниковой структуры выбранного вентиля, о
С. – максимально допустимая температура полупроводниковой структуры выбранного вентиля, о
С.
Определим потери в вентиле:
 (3.15) (3.15)
где U0
=1,03 – пороговое напряжение вентиля, В;
Iа
= 13,26 – среднее значение анодного тока вентиля, А;
Кф
=  – коэффициент формы анодного тока вентиля; – коэффициент формы анодного тока вентиля;
Rд
= 4.6*10-3
– дифференциальное сопротивление вентиля, Ом.
Охладитель выбираем типа О231-80, у которого тепловое сопротивление равно
 = 0,2 о
С/Вт = 0,2 о
С/Вт
Тепловое сопротивление вентиля и охладителя с естественным охлаждением определяется таким образом:
r т
= r1
+ r2
+ r3
, (3.16)
где r1
– тепловое сопротивление переход-корпус прибора, °С/Вт;
r2
– тепловое сопротивление корпус прибора – контактная поверхность охладителя, °С/Вт;
r3
– тепловое сопротивление охладитель – окружающая среда, °С/Вт.
Общее тепловое сопротивление равно:
rт
= 0,5+0,2+0,85=1,55 °C/Вт (3.17)
Тогда температура структуры в стационарном режиме:
Qст
= 40 + 1,55 ·16,35 = 65 °C (3.18)
Максимально допустимая температура структуры приведена в справочнике и составляет = 125 °C. Таким образом, сравнивая расчетную и взятую со справочника температуру приходим к выводу, что тепловой режим вентиля нам подходит.
3.2.2 Ограничение коммутационных перенапряжений
При выключении силовых диодов и тиристоров из-за обрыва обратного тока на индуктивности коммутационного контура возникает ЭДС, которая суммируется с коммутирующей ЭДС. Эта ЭДС обычно называется коммутационным перенапряжением. Для ограничения перенапряжения применяются защитные RC – цепочки, включаемые параллельно полупроводниковым приборам.
Для расчета защитной цепочки необходимо знать амплитуду обратного тока защищаемого вентиля и индуктивность контура коммутации, которая в основном определяется реактивной составляющей сопротивления КЗ анодного трансформатора:
 (3.19) (3.19)
Амплитуда обратного тока вентиля зависит от величины наполненного заряда и скорости уменьшения анодного тока, которая может быть вычислена по формуле:
 (3.20) (3.20)
где  – скорость изменения анодного тока; – скорость изменения анодного тока;
 – амплитуда коммутирующей ЭДС; – амплитуда коммутирующей ЭДС;
Lk
– индуктивность коммутационного тока вентиля.
Для найденного значения скорости изменения анодного тока по зависимостях, приведенных в справочнике, определяем величины заряда и времени обратного восстановления.
Заряд обратного восстановления:

Время обратного восстановления:

Тогда амплитуда обратного тока вентиля равна:
 (3.21) (3.21)
Вычисляем сопротивление резистора защитной цепи, равное волновому сопротивлению контура.
 (3.22) (3.22)
Вычисляем емкость защитной цепочки:
 (3.23) (3.23)
Выбираем значения: Rд
= 150 Ом, Сд
= 68 нФ.
Мощность, рассеиваемая в резисторе защитной цепи, определяется энергией, запасенной в элементах колебательного контура при включении и выключении вентиля. Эта мощность вычисляется по формуле:
 (3.24) (3.24)
Таким образом, выбираем следующие элементы:
1. Резистор – МЛТ2-0,125-270 Ом 10% ОЖО.467.081ТУ; 10% ОЖО.467.081ТУ;
2. Конденсатор – КМ 68 нФ-630 В ОЖО.462.141 ТУ.
3.2.3 Расчет индуктивности сглаживающего реактора
В большинстве случаев переменная составляющая выпрямленного напряжения (пульсация), действующая на выходе выпрямителя, недопустимо велика для потребителей. Сглаживающий фильтр, который включается между выходом выпрямителя и нагрузкой, предназначен для уменьшения пульсации.
Наиболее широко применяются сглаживающие фильтры, состоящие из индуктивности и емкости (типа LC) или из сопротивления и емкости (типа RC).
Все сглаживающие фильтры характеризуются коэффициентом сглаживания q, который можно представить как отношение амплитуды первой гармоники пульсации на входе фильтра U01~
к амплитуде первой гармоники пульсации на выходе первого звена U11~
:

К сглаживающим фильтрам предъявляются также требования, связанные с конструктивным исполнением (масса, габариты, КПД и т. п.), а также эксплуатационными особенностями (стоимость, надежность). Индуктивный фильтр (L-фильтр) применяется для выпрямителей средней и большой мощности, так как позволяет обеспечить непрерывность тока в цепи нагрузки и благоприятный режим работы выпрямителя. Индуктивный фильтр (рис. 3.3) представляет собой реактор, включенный между схемой выпрямления и нагрузкой. Напряжение на выходе выпрямителя содержит постоянную составляющую Ud
и переменную U~
. Пренебрегая изменением этих составляющих от нагрузки, можно заменить ими полупроводниковую часть схемы выпрямителя, т. е. считать, что на входе фильтра включены два последовательно соединенных источника напряжения: с постоянной ЭДС Ud
и переменной ЭДС U~
. Постоянная ЭДС не оказывает влияния на пульсацию, а в качестве переменной ЭДС можно рассматривать только ЭДС основной гармоники пульсации U1
m
(первой гармоники переменной составляющей), так как они преимущественно определяют коэффициент пульсации.

Рисунок 3.3 – Схема выходного L-фильтра
Индуктивность сглаживающего дросселя может определятся как из условия обеспечения заданного коэффициента пульсаций в токе нагрузки, так и из условия обеспечения заданной ширины зоны прерывистых токов. При проектировании выпрямителя необходимо проверить оба условия и выбрать большее значение индуктивности Ld
. [14]
Поскольку амплитуда первой гармоники пульсаций выходного напряжения выпрямителя зависит от угла регулирования, необходимо определить максимальное значение этого угла:
 (3.25) (3.25)

где U2
min
– минимальное выпрямленное напряжение;
αmax
– максимальный угол регулирования.
Максимальное значение выпрямленного напряжения:
 (3.26) (3.26)
Амплитуда первой гармоники пульсаций выпрямленного напряжения определяется соотношением:
 (3.27) (3.27)
где qm – пульсность схемы.
Коэффициент пульсаций выпрямленного тока:
 (3.28) (3.28)
где  =2/35 – коэффициент пульсаций при α =0. =2/35 – коэффициент пульсаций при α =0.
 (3.29) (3.29)
где  – амплитуда первой гармоники пульсаций выпрямленного тока. – амплитуда первой гармоники пульсаций выпрямленного тока.
Требуемая суммарная индуктивность контура выпрямленного тока:
 (3.30) (3.30)
отсюда индуктивность сглаживающего дросселя:
 (3.31) (3.31)
3.2.4 Конструктивный расчет сглаживающего реактора
Для получения достаточно хорошей фильтрации, как было показано выше, дроссель фильтра должен иметь достаточную индуктивность. Такую индуктивность можно получить, лишь применяя реактор с сердечником из ферромагнитного материала. Практически все реакторы фильтров выполняются с сердечниками из трансформаторной стали и по своей конструкции мало отличаются от трансформаторов.
Реактор, подобно трансформатору, состоит из сердечника, обмотки, каркаса и деталей, скрепляющих сердечник.
Для малых реакторов чаще всего применяются броневые сердечники таких же типов, что и для трансформаторов, но меньших размеров.
Вследствие того, что через реактор фильтра протекает значительная постоянная составляющая выпрямленного тока, сердечник реактора сильно намагничивается постоянным магнитным потоком. При этом, как известно из электротехники, намного уменьшается магнитная проницаемость материала сердечника. Для уменьшения постоянного подмагничивания сердечника в нем применяется воздушный зазор или зазор какого-либо другого немагнитного материала. Для каждого конкретного случая существует наивыгоднейшая длина зазора в сердечнике, при которой реактор обладает наибольшей индуктивностью.
При конструктивном расчете реактора необходимо определить следующие его данные:
1) тип и размеры сердечника;
2) количество витков обмотки ω;
3) диаметр провода в в мм;
4) длину воздушного зазора lz
в мм.
Заданными величинами (известными из электрического расчета фильтра) при этом являются:
1) индуктивность реактора L в Гн;
2) ток, протекающий через реактор (выпрямленный ток) Id
, в А.
Расчет реактора, подобно расчету трансформатора, целесообразно начать с выбора сердечника.
Выбор размеров сердечника реактор следует производить, исходя из заданной величины  , которая характеризует магнитную энергию, запасаемую в сердечнике. Чем больше величина , которая характеризует магнитную энергию, запасаемую в сердечнике. Чем больше величина  , тем больший объем должен иметь сердечник дросселя. , тем больший объем должен иметь сердечник дросселя.
Для определения минимальной величины объема сердечника реактора V можно пользоваться следующей приближенной формулой:
 (3.32) (3.32)
Если объем сердечника взять много меньше величины, найденной из формулы (3.32), то будет иметь место сильное магнитное насыщение сердечника. Это ведет к значительному уменьшению магнитной проницаемости материала сердечника и увеличению расхода провода на изготовление данного реактора. [17]
По справочнику основных габаритов сердечников [18] выбираем тип сердечника, удовлетворяющий выражению (3.32): стержневой ленточный магнитопровод типа ПЛ6,5х12,5х8, для которого Vсм
= 2,69 см3
; Sсм
= 0,73 см2
; lср.м
= 3,69 см. Далее переходим к расчету обмотки реактора.
Если реактор работает при слабом подмагничивании постоянным током, то зазор в его сердечнике не делается. Если же реактор работает при значительном постоянном токе, когда необходимо делать в его сердечнике зазор, то число витков вычисляем по формуле:
 (3.33) (3.33)
где Sсм
– активная площадь сечения магнитопровода;
Vсм
– активный объем магнитопровода.
Наивыгоднейшая длина зазора сердечника может быть найдена из следующего приближенного соотношения:
 (3.34) (3.34)
Диаметр провода обмотки реактора находят по заданному выпрямленному току, исходя из допустимой плотности тока. При плотности тока ј = 2,5 А/мм необходимый диаметр проводов находим по формуле:
 (3.35) (3.35)
Определяем полную массу реактора по формуле:
 (3.36) (3.36)
Масса провода  определяется по формуле: определяется по формуле:
 (3.37) (3.37)
где ρ = 8600 кг/м3
– плотность меди;
 – площадь сечения провода; – площадь сечения провода;
 – полная длина провода. – полная длина провода.
Площадь сечения провода определяем по формуле:
 (3.38) (3.38)
Полная длина провода определяется из соотношения:
 (3.39) (3.39)
где lср.м
– средняя длина витка.
Тогда полная масса реактора будет равна:

3.3 Электробезопасность экспериментальной установки
Основные требования к безопасности электрооборудования изложены в ГОСТ 12.2.007.0-75 системы стандартов безопасности труда.
Стандарт устанавливает общие требования безопасности конструкции изделий, т. е. требования безопасности, предотвращающие или уменьшающие до допустимого уровня воздействия на человека: электрического тока, электрической искры и дуги, движущихся частей изделия, частей, нагревающихся до высоких температур, опасных и вредных материалов, используемых в конструкции изделия, а также опасных и вредных веществ, выделяющихся при его эксплуатации, шума, ультразвука и вибрации, электромагнитных полей и теплового, оптического и рентгеновского излучения. [19]
3.3.1 Расчет заземления
При повреждении изоляции электроустановки, ее корпус и другие конструктивные элементы могут оказаться под напряжением. Если человек прикоснется к такому поврежденному оборудованию, через него пройдет ток замыкания на землю, который может быть опасным для жизни.
Для защиты человека при прикосновении к металлическим частям электроустановки, случайно оказавшимся под напряжением, применяют защитное заземление – преднамеренное соединение корпуса или других металлических конструкций установки с землей. Назначение защитного заземления – создание между корпусом электрического устройства и землей электрического соединения с малым сопротивлением.
При прикосновении человека к заземленному оборудованию, оказавшемуся под напряжением, через его тело пройдет ток малой величины, безопасный для организма. Основной ток замыкания на землю пойдет по заземляющему устройству. Заземляющее устройство – совокупность заземлителя и заземляющих проводников. Заземлитель – металлический проводник, находящийся в непосредственном соприкосновении с землей. Заземляющие проводники соединяют заземляемые части электроустановки с заземлителем. Сопротивление заземляющего устройства в основном определяется сопротивлением растеканию тока с заземлителя в грунт.
Для заземления используют естественные и искусственные заземлители. Естественные заземлители – арматура железобетонных сооружений, фундаменты зданий, трубопроводы и другие металлические конструкции, имеющие надежный контакт с землей. В качестве искусственных заземлителей чаще всего используют вертикально заглубленные стальные трубы, стержни, уголки, соединенные поверху стальной горизонтальной полосой.
Сопротивление заземляющего устройства, к которому присоединены нейтрали трансформаторов либо выводы источников однофазного тока, в любое время годе должно быть не более 4 Ом соответственно при линейном напряжении 380 В источника трехфазного тока.
Сопротивление растеканию тока не должно превышать нормативной величины. Для электроустановок напряжением до 1000 В нормативное значение составляет 4 Ом, а если подсоединенная к сети мощность не превышает 100 кВА – 10 Ом.
Монтажный участок по сборке силового блока привода постоянного тока находится на первом этаже двухэтажного отдельно стоящего кирпичного здания размером 20×10м. Мощность тока, потребляемая участком, превышает 100 кВА и поэтому нормативная величина сопротивления заземлителя Rн
не должна превышать 4 Ом. Заземлитель предполагается выполнить из стальных вертикальных стержневых электродов длиной lв
= 1,5 м, диаметром в = 0,02 м, верхние концы которых расположены на глубине t0
= 0,8 м. Вертикальные электроды соединены между собой с помощью горизонтального электрода – стальной полосы сечением 4x40 мм, уложенной в земле на глубине t0
= 0,8 м. Вертикальные электроды расположены на расстоянии а = 3м друг от друга. Тип заземлителя выбираем контурный по периметру участка.
Выбираем 3-ю климатическую зону.
Определяем коэффициент сезонности φ для однородной земли: φв
=1,2, φг
= 2.
Удельное сопротивление однородного грунта (суглинок) ρ0
= 100 Ом·м.
Рассчитываем удельное сопротивление грунта для вертикального электрода:
 (3.40) (3.40)
Удельное сопротивление грунта для горизонтального электрода:
 (3.41) (3.41)
Сопротивление одиночного вертикального заземлителя:
 (3.42) (3.42)
Число вертикальных заземлителей:
 (3.43) (3.43)
Длина горизонтальной полосы:
 (3.44) (3.44)
Сопротивление горизонтального заземлителя:
 (3.45) (3.45)
где b – ширина стальной горизонтальной полосы.
Определяем сопротивление группового заземлителя:
 (3.46) (3.46)
где ηв
– коэффициент использования вертикальных заземлителей;
ηг
– коэффициент использования горизонтальных заземлителей.
По условиям безопасности заземление должно обладать малым сопротивлением (Rн
< 4 Ом), обеспечить которое можно путем увеличения геометрических размеров электродов или увеличив их число, соединенных в контур. Второй путь намного экономичнее по затратам металла и другим условиям. Кроме того, при применении нескольких электродов можно выровнять потенциальную кривую на территории, где они размещены. Поскольку расчетное Rз
=4,72 Ом > Rн
= 4 Ом, то увеличиваем количество вертикальных электродов до n = 24.
Тогда длина горизонтальной полосы:
 (3.47) (3.47)
Сопротивление горизонтального заземлителя:
  (3.48) (3.48)
Сопротивление группового заземлителя:
 (3.49) (3.49)
где ηв
= 0,624; ηг
= 0,312.
Так как Rз
= 3,6 Ом < Rн
= 4 Ом, то этот результат принимаем как окончательный.
Таким образом, проектируемый заземлитель контурный, состоит из 24 вертикальных стержневых электродов длиной 1,5 м, диаметром в = 20мм, заглубленных в землю на 0,8 м и соединенных стальной горизонтальной полосой длиной 75 м, сечением 4х40 мм (рис. 3.4).

Рисунок 3.4 – Схема заземления: 1 – монтажный участок, 2 – вертикальный заземлитель, 3 – горизонтальный заземлитель
3.3.2 Расчет автоматического защитного отключения
Защитным отключением называется система защиты, обеспечивающая автоматическое отключение всех фаз или полюсов аварийного участка сети с напряжением до 1000 В с полным временем отключения с момента возникновения однофазного замыкания не более 0,2 с.
Экспериментальный стенд питается напряжением 220 В, находясь в конце линии 380/220 В и будучи зануленным потребителем энергии. Вследствие удаленности ее от трансформатора возможны случаи отказа зануления. Вместе с тем по условию безопасности требуется безусловное отключение установки при замыкании фазы на корпус, причем напряжение прикосновения Uпр.доп
не должно превышать длительно 60В. Для выполнения этих условий снабжаем установку защитно-отключающим устройством, реагирующим на потенциал корпуса. При этом используется реле напряжения, у которого напряжение срабатывания Uср
= 30 В, сопротивление обмотки активное Rр
= 400 Ом и индуктивное X = 200 Ом.
Принимаем, что при касании к корпусу человек стоит на сырой земле вне зоны растекания тока с заземлителей, т. е. считаем, что α1
= α2
= 1. В этом случае условие безопасности будет:
φз.доп
= Uпр.доп
, В (3.50)
Следовательно
 (3.51) (3.51)

Откуда находим значение сопротивления вспомогательного заземления:
Rв
£ 470 Ом, при котором защитное отключение будет срабатывать, если напряжение прикосновения достигнет 60 В.
Таким образом, если при прикосновении человека к корпусу оборудования или фазе сети напряжение прикосновения (или ток через человека) превысит длительно допустимое значение, то возникает реальная угроза поражения человека током, и мерой защиты в этом случае может быть лишь быстрый разрыв цепи тока через человека, т. е. отключение соответствующего участка сети.
Для выполнения этой задачи в качестве реле в схеме защитного отключения выбираем однофазное реле переменного тока с тиристорным выходом 5П19.01-ТС-1-4 с параметрами:
– Коммутируемое напряжение (ср. кв. значение), В –140;
– Коммутируемое напряжение (пик. значение), В – 400;
– Коммутируемый ток, А – 1,0;
– Ударный ток, А – 15.
4 МОДЕЛИРОВАНИЕ СПП ИМИТАТОРА ВТ
4.1 Построение семейства внешних характеристик СПП
В процессе проектирования СПП автоматизированного электропривода имитатора необходимо провести его моделирование. Для моделирования рассчитанной схемы будем использовать программу схемотехнического проектирования MICROCAP 7.1 (рис. 4.2). Результаты моделирования представлены на рисунках 4.4, 4.5, 4.6, 4.7.
При моделировании силовых полупроводниковых вентилей (тиристоров) будем использовать их макромодели. Нагрузкой трехфазного мостового выпрямителя является якорная цепь двигателя постоянного тока, поэтому такая работа выпрямителя называется работой на противо-ЭДС. В данном случае, якорная цепь двигателя постоянного тока содержит в схеме замещения не только RL-элементы якорной обмотки, но и нелинейный зависимый источник напряжения NFV, который описывается функциональной зависимостью:
 (4.1) (4.1)
Задачей моделирования является рассмотрение влияния значения индуктивности в цепи нагрузки Ld
на внешнюю характеристику выпрямителя. Внешней характеристикой называется зависимость выпрямленного напряжения от среднего значения тока нагрузки, т. е. Ud
= f(Id
) при α = const. Внешняя характеристика определяется внутренним сопротивлением выпрямителя, которое приводит к снижению выпрямленного напряжения с ростом нагрузки. Снижение напряжения обусловлено активным сопротивлением схемы ∆UR
, падением напряжения в тиристорах ∆UVS
и индуктивным сопротивлением ∆Uх
, которое проявляется при процессах коммутации:
 (4.2) (4.2)
где
 (4.3) (4.3)
Согласно (4.2) выходное напряжение выпрямителя снижается по мере увеличения тока нагрузки Id
за счет внутреннего падения напряжения.
Графики результирующих внешних характеристик выпрямителя, нагруженного на противо-ЭДС, приведены на рис. 4.1. Показателен крутой спад характеристик в области прерывистого выпрямленного тока. Это обусловлено резкой зависимостью длительности протекания тока λ от изменения противо-ЭДС и ограничением величины импульса тока реактансами Ха
и Хd
. В режиме непрерывного тока это ограничение определяется процессом коммутации, в котором участвует только реактанс Ха
.

Рисунок 4.1 – Семейство внешних характеристик
При конечном значении индуктивности в цепи нагрузки может возникнуть режим прерывистого выпрямленного тока. В этом режиме ток проводящего вентиля спадает до нуля раньше, чем импульс управления поступает на следующий вентиль и в выпрямленном токе образуется нулевая пауза. Прерывистый выпрямленный ток приводит к искажению всех основных характеристик выпрямителя и, как правило, является нежелательным. Для сокращения области его существования необходимо увеличить постоянную времени нагрузки за счет роста индуктивности фильтра Ld
.
Следует отметить, что интервалы прерывистых токов в управляемых выпрямителях большой мощности при двигательной нагрузке характеризуются малыми величинами среднего значения выпрямленного тока (проценты или доли процента номинального значения).

Рисунок 4.2 – Модель СПП имитатора ВТ
После того, как построена принципиальная схема СПП в программе МС7, переходим к расчету характеристик, выбирая в меню Analysis вид анализа Transient (Alt+1) – расчет переходных процессов (рис. 4.3). Для построения внешних характеристик необходимо снять графики переходных процессов выпрямленного напряжения
Ud
и тока Id
, изменяя значение протово-ЭДС (рис. 4.4).

Рисунок 4.3 – Окно задания параметров для анализа переходных процессов


Рисунок 4.4 – Графики переходных процессов Ud
и Id
Для построения семейства внешних характеристик при определенных углах управления α необходимо в окне параметров источников V1, V2, V3 (рис. 4.2) изменять значение начальной фазы РН.

Рисунок 4.5 – Диаграммы сетевого напряжения V1, V2, V3 при α = 0
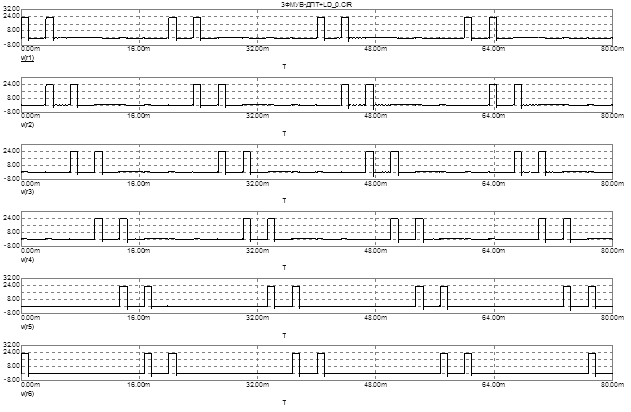
Рисунок 4.6 – Диаграммы сдвоенных управляющих импульсов
Результаты моделирования СПП представляем в виде таблице.
Таблица 4.1 – Зависимость Ud
= f(Id
)
| α, град.
|
Id
, А
|
Ud
, В
|
α, град.
|
Id
, А
|
Ud
, В
|
| 21о
|
0
|
255
|
60 о
|
0,4
|
255,18
|
| 6,55
|
252,43
|
1,92
|
241,83
|
| 8,5
|
251,71
|
3,46
|
233,58
|
| 9,82
|
251,25
|
5,39
|
225,85
|
| 16,44
|
248,84
|
8
|
218,13
|
| 23,14
|
246,64
|
14,72
|
215,98
|
| 29,92
|
244,51
|
28,13
|
211,4
|
| 36,75
|
242,41
|
34,85
|
209,36
|
| 30 о
|
1
|
256
|
75 о
|
0,0278
|
250
|
| 3,36
|
253,78
|
0,69
|
230,55
|
| 6,65
|
252,6
|
1,44
|
220,66
|
| 9,98
|
251,42
|
2,5
|
212,22
|
| 16,72
|
249,27
|
5,47
|
195,9
|
| 23,5
|
247,11
|
7,39
|
187,8
|
| 30,3
|
244,97
|
9,6
|
180,6
|
| 37,125
|
242,86
|
13,4
|
175,93
|
| 45 о
|
|
|
90 о
|
0,0254
|
220
|
| 1,13
|
256,33
|
0,434
|
200
|
| 2
|
252,25
|
0,9
|
190,57
|
| 4,96
|
245,15
|
2,5
|
172
|
| 11,65
|
242,94
|
3,62
|
163,32
|
| 18,36
|
240,72
|
5
|
154,9
|
| 25
|
238,47
|
8,8
|
139,4
|
| 31,82
|
236,29
|
10,5
|
131,55
|
| 38,56
|
234,15
|
11
|
129,6
|
| |
|
12,4
|
125
|
С помощью программы для работы с таблицами Microsoft Excel строим семейство внешних характеристик модели СПП (рис. 4.7).

Рисунок 4.7 – Семейство внешних характеристик СПП при Ld
= 1,65 мГн
4.2 Построение оптимизированной модели СПП с выбором оптимальной индуктивности реактора
При решении реальных задач объект обычно характеризуется не одним, а несколькими показателями (критериями) функционирования. При оптимизации требования к ним могут быть противоречивыми, т. е. улучшая один показатель, неминуемо ухудшается часть остальных. Поэтому возникает задача определения некоторой компромиссной точки, в равной степени удовлетворяющей всем требованиям. Как правило, результаты по каждому отдельному показателю качества будут хуже, чем в случае однокритериальной оптимизации по этому параметру. [21]
Критерии – это показатели, по которым сравнивают оптимальное значение индуктивности. В качестве критериев сравнения выбираем:
1) быстродействие системы τ, которое определяется по формуле:
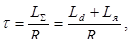 (4.4) (4.4)
где Lя
– индуктивность обмотки якоря двигателя;
Rя
– сопротивление обмоток якоря двигателя;
2) граничный прерывистый ток Id
гр.
, значение которого определяется с помощью длительности протекания выпрямленного тока λ:
 (4.5) (4.5)
3) масса сглаживающего реактора, которая определяется по методике, описанной в п. 3.2.5.
Далее необходимо определить значимость критериев с помощью весовых коэффициентов. Поскольку задача определения весовых коэффициентов значимости является очень сложной, используем субъективный выбор: для 1-го критерия весовой коэффициент а = 0,6; для 2 го критерия – а = 0,3; для 2-го критерия – а =0,1.
Тогда многокритериальный оптимум вычисляется по формуле:
 (4.6) (4.6)
где аi
– весовой коэффициент;
Qi
– значение локального критерия;
Qmax
– максимальное значение критерия.
Многокритериальный оптимум Q выбираем по минимальному значению. Алгоритм по нахождению многокритериального оптимума представлен на рис. 4.8. По данному алгоритму создана программа, которая была написана на языке Pascal. Программа представлена в Приложении А.
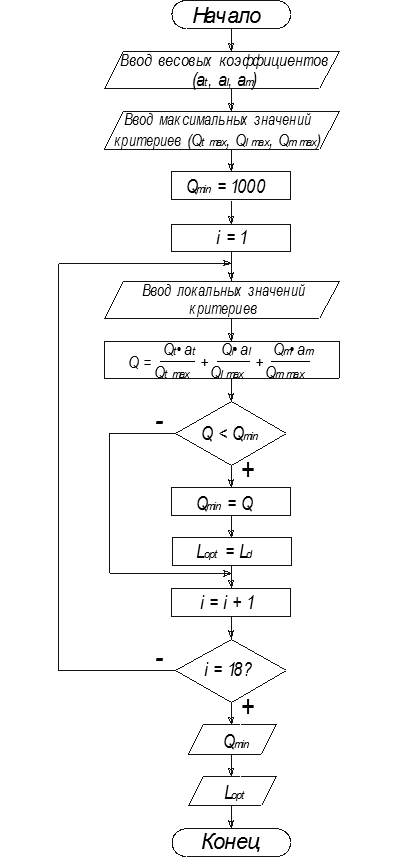
Рисунок 4.8 – Алгоритм оптимизации
Таблица 4.2 – Результаты многокритериальной оптимизации
| Ld,мГн
|
Id, A
|
τ,мс
|
m, г
|
Q(τ)
|
Q(Imax)
|
Q(m)
|
QΣ
|
| 0,5
|
4
|
2,85
|
257,982
|
0,07651
|
0,3
|
0,007485
|
0,383995
|
| 1
|
3,67
|
3,35
|
361,1846
|
0,089933
|
0,27525
|
0,010479
|
0,375662
|
| 1,5
|
3,38
|
3,85
|
264
|
0,103356
|
0,2535
|
0,00766
|
0,364515
|
| 1,65
|
3,31
|
4
|
270
|
0,107383
|
0,24825
|
0,007834
|
0,363466
|
| 2
|
3,14
|
4,35
|
441
|
0,116779
|
0,2355
|
0,012795
|
0,365074
|
| 2,5
|
2,93
|
4,85
|
726
|
0,130201
|
0,21975
|
0,021064
|
0,371015
|
| 3
|
2,75
|
5,35
|
694
|
0,143624
|
0,20625
|
0,020135
|
0,37001
|
| 4
|
2,44
|
6,35
|
1031,038
|
0,17047
|
0,183
|
0,029914
|
0,383384
|
| 5
|
2,2
|
7,35
|
937,6657
|
0,197315
|
0,165
|
0,027205
|
0,38952
|
| 6
|
2
|
8,35
|
1192,461
|
0,224161
|
0,15
|
0,034598
|
0,408759
|
| 7
|
1,83
|
9,35
|
2275,516
|
0,251007
|
0,13725
|
0,066021
|
0,454278
|
| 8
|
1,68
|
10,35
|
2768,385
|
0,277852
|
0,126
|
0,080321
|
0,484173
|
| 9
|
1,56
|
11,35
|
1412,589
|
0,304698
|
0,117
|
0,040984
|
0,462682
|
| 10
|
1,46
|
12,35
|
1690,421
|
0,331544
|
0,1095
|
0,049045
|
0,490089
|
| 12,5
|
1,24
|
14,85
|
1869,887
|
0,398658
|
0,093
|
0,054252
|
0,54591
|
| 15
|
1,14
|
17,35
|
3446,665
|
0,465772
|
0,0855
|
0,1
|
0,651272
|
| 17,5
|
1,08
|
19,85
|
2799,638
|
0,532886
|
0,081
|
0,081227
|
0,695113
|
| 20
|
1,02
|
22,35
|
2927,753
|
0,6
|
0,0765
|
0,084945
|
0,761445
|

Рисунок 4.9 – Зависимость быстродействия от индуктивности τ = f(Ld
)

Рисунок 4.10 – Зависимость массы от индуктивности m = f(Ld
)

Рисунок 4.11 – Зависимость тока от индуктивности Id
= f(Ld
)

Рисунок 4.12 – График для определения оптимального значения индуктивности
Таким образом, оптимальное значение индуктивности будет определяться при минимальном значении оптимума, равное Qmin
= 0,36: Ld
опт.
= 2 мГн. Данной индуктивности соответствует реактор со стержневым ленточным магнитопроводом типа ПЛ6,5х12,5х16 с такими расчетными параметрами:
- Vсм
= 3,52 см3
– активный объем магнитопровода;
- Sсм
= 0,73 см2
– активная площадь сечения магнитопровода;
- Sок
= 1,28 см2
– площадь окна;
- lср.м
= 3,69 см – средняя длина витка;
- m = 37 г – масса магнитопровода
и полной массой М, равной 441 г.
Значение оптимизированной индуктивности не соответствует значению рассчитанной, так как критерии и весовые коэффициенты выбирались субъективно.
5 ЭКСПЕРИМЕНТАЛЬНАЯ ЧАСТЬ
5.1 Общие требования
1. Испытания должны проводиться в нормальных климатических условиях по ГОСТ 15150 при номинальном напряжении сети, если в методах контроля не оговорены другие условия.
2. Контрольно-измерительные приборы и инструменты, применяемые при измерениях и испытаниях, должны быть поверены в сроки и в порядке, установленном ДСТУ 2708 и обеспечивать контроль параметров с заданной точностью.
Не допускается проведение испытаний на неаттестованном оборудовании и средствах измерений, срок обязательных поверок которых истек. Испытательное оборудование должно быть аттестовано по ГОСТ 24555.
3. При внешнем осмотре и проверке соответствия экспериментальной установки комплекту документации следует проверить:
- внешний вид стенда, в том числе чистоту поверхностей, качество защитных покрытий, пайки; упаковку на соответствие требованиям конструкторской документации;
- качество электрических контактных соединений должно проверяться щупом класса точности II, толщиной 0,03 мм. Проверке подлежат электрические контактные соединения проводов постоянного и переменного тока;
- правильность сборки и монтажа;
- соответствие деталей и сборочных единиц преобразователя сборочным чертежам и электрическим схемам.
Соответствие электрическим схемам должно проверяться любым методом, позволяющим установить наличие всех необходимых и отсутствие лишних электрических связей;
- наличие и качество надписей и маркировки по ГОСТ 18620.
Внешний вид, комплектность и монтаж должны быть проверены визуально.
4. Проверка степени защиты оболочки корпуса экспериментальной установки проводится по методике ГОСТ 14254.
5. Измерение сопротивления изоляции силовых токоведущих цепей звена постоянного и переменного тока относительно корпуса должно производиться между закороченными между собой фазами выходных выводов и корпусом преобразователя мегаомметром на 2500 В класса точности 1,0.
5.2 Описание экспериментального стенда
Экспериментальный стенд состоит из: силового блока привода постоянного тока, системы управления, ДПТ и синхронного генератора (СГ) (рис. 5.1).
Управление режимом работы имитатора осуществляется с помощью поста ручного управления.
ДПТ и СГ установлены на массивной металлической платформе и соединены специальной муфтой непосредственно вал к валу. Таким образом, вращение ДПТ передается непосредственно (без редуктора) на вал генератора.
Все узлы стенда, кроме платформы с электрическими машинами, размещены на металлическом каркасе.
Скорость вращения ДПТ регулируется изменением напряжения на якоре с помощью управляемого выпрямителя (УВ). Контроль скорости вращения ДПТ производится с помощью датчика скорости (ДС). Контроль тока цепи якоря осуществляется с помощью датчика тока (ДТ).
Для защиты от токов короткого замыкания все цепи имитатора включены в трехфазную сеть 220/380 В через автоматический выключатель QF1.
Синхронный генератор в экспериментальном стенде выполняет функцию нагрузки двигателя. Питание статора синхронного генератора с фазным ротором осуществляется с помощью блока питания (БП).
Ротор СГ подключен к входу неуправляемого выпрямителя (НВ) через измерительный комплект К505, для измерений электрических параметров на зажимах ротора. Выпрямленный ток на выходе неуправляемого выпрямителя сглаживается реактором L1. Также к выходу неуправляемого выпрямителя последовательно реактору подключена нагрузка, представленная резистором Rн
.
Рисунок 5.1 – Схема экспериментального стенда
Для построения внешних характеристик схемы экспериментального стенда необходимо, изменяя нагрузку, снимать показания амперметра и вольтметра, подключенных к якорной цепи ДПТ. А с помощью осциллографа можно наблюдать графики переходных процессов выпрямленного напряжения Ud
и тока Id
(рис. 5.2).
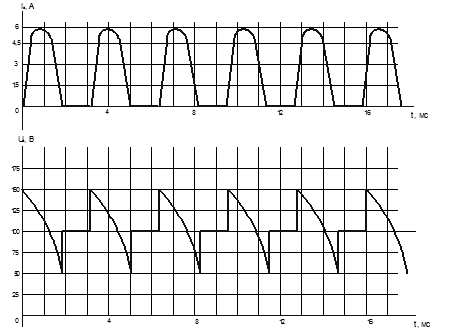
Рисунок 5.2 – Графики переходных процессов Ud
и Id
в прерывистом режиме
Результаты эксперимента представляем в виде таблицы.
Таблица 4.1 – Зависимость Ud
= f(Id
)
| α, град.
|
Id
, А
|
Ud
, В
|
α, град.
|
Id
, А
|
Ud
, В
|
| 5о
|
8
|
150
|
95 о
|
6
|
140
|
| 8,5
|
146
|
6,5
|
135
|
| 9
|
142
|
7
|
130
|
| 10
|
141
|
7,5
|
125
|
| 11
|
137
|
9
|
120
|
| 12
|
135
|
10
|
115
|
| 12,5
|
132
|
11
|
105
|
| 13
|
130
|
12,5
|
100
|
Для проверки адекватности модели и выбранного оптимизированного значения индуктивности необходимо провести сравнения семейства внешних характеристик моделирования и эксперимента (рис. 5.3).

Рисунок 5.3 – Семейство внешних характеристик СПП расчета и эксперимента при оптимизированной индуктивности Ld
= 2мГн
После сравнения внешних характеристик вычисляем относительную погрешность δ


|