Курсовая работа: Вентиляційні установки
|
Название: Вентиляційні установки Раздел: Рефераты по физике Тип: курсовая работа | |||||||||||||||
| Содержание 1. Електропривід вентиляційних установок Класифікація вентиляторів Розрахунок вентиляційних установок Регулювання параметрів вентилятора Вибір вентилятора та електропривода до нього 2. Комплекти обладнання для автоматичного керування вентиляційними установками Особливості автоматизованого електропривода вентиляційних установок в інших технологічних процесах 1. Електропривід вентиляційних установокВентиляція - це регулювання повітрообміну в приміщенні з метою створення нормованих параметрів мікроклімату (температури, вологості, газового складу повітря, запиленості та швидкості руху повітря). У виробничих приміщеннях сільськогосподарських підприємств, як правило, нормовані значення температури та вологості, а в тваринницьких приміщеннях - ще і швидкість руху повітря. Вентиляція приміщень здійснюється припливними і витяжними вентиляційними системами. Вентиляційні установки бувають з природною тягою, механічним спонукачем тяги та комбіновані. Застосовуються припливні і витяжні механічні системи вентиляції. Припливні системи з механічним спонуканням тяги у деяких випадках мають підігрів повітря за рахунок водяних, парових та електричних калориферів або використовують припливно-витяжні установки серії ПВУ. Швидкість руху повітря V, м/с, у витяжних каналах вентиляційної системи з природною тягою визначається залежністю
де Н - висота витяжних каналів, м; Qвн - температура повітря в приміщенні,°С; Qзов - температура зовнішнього повітря,°С; 273 2,2 - коефіцієнт об'ємного розширення повітря. Швидкість руху повітря припливної системи вентиляції з природною тягою залежить від швидкості напору вітру. Як видно з (1), при рівності температур повітря в приміщенні і зовнішнього витяжна система з природною тягою не діє. Це може мати місце в теплий період року, коли вентиляція тваринницьких та птахівницьких приміщень найбільш необхідна. Тому ці приміщення, як правило, обладнують вентиляційними системами з механічним спонукачем тяги.
Класифікація вентиляторівВентилятором називають гідравлічну машину, призначену для перемішування чи переміщення під певним тиском повітря або його сумішей з дрібними частинками за допомогою робочого органа вентилятора у вигляді лопаток. Вентилятори поділяють на радіальні (відцентрові) та осьові. Основними елементами аеродинамічної схеми радіальних вентиляторів є: вхідний патрубок, робоче колесо і спіральний корпус (рис.1). Через вхідний патрубок, який має різну конфігурацію (рис.2), підводиться повітря до робочого колеса. Робоче колесо здійснює передачу енергії від електродвигуна повітрю, яке переміщується. Робоче колесо, як правило, має передній і задній диски, між якими закріплені лопатки. Основним розміром робочого колеса є діаметр, заміряний по кінцях лопаток. Допускаються модифікації вентиляторів з діаметрами, що відрізняються від стандартних на величину ± 10 % (через 5 %) за рахунок переміщення лопаток до осі обертання або зменшення їх розмірів. При цьому решта розмірів проточної частини вентилятора залишається незмінними. Це дає можливість одним і тим самим номером вентилятора забезпечити різні подачу і тиск. Так, для радіального вентилятора ВЦ4-75 № 4 при Д/Дном = 1 номінальна подача при частоті обертання 1410 об/хв дорівнює 2,9 тис. м3 /год, а тиск - 409 Па. При співвідношенні діаметрів 0,9 та 1,1 згадані параметри відповідно мають значення: 2,34 тис. м3 /год і 309 Па та 2,93 тис. м3 /год та 630 Па. Номеру вентилятора відповідає номінальний діаметр робочого колеса, виражений у дециметрах. Державним стандартом рекомендуються такі номери вентиляторів: 1; 1,25; 1,6; 2,5; 3,15; 4; 5; 6,3; 8; 10; 12,5; 16; 20; 25; 31,5; 40; 50.
Рис.1. Аеродинамічна схема раді - Рис.2. Конфігурації вхідних ального вентилятора: патрубків: 1 - робоче колесо; 2 - вхідний патрубок; a - циліндричний; б - конічний; 3 - спіральний корпус в – тороїдальний
Рис.3. Варіанти встановлення корпусів радіальних вентиляторів Спіральний корпус радіального вентилятора призначений для відведення потоку повітря в певному напрямку, а також для часткового перетворення динамічного тиску повітряного потоку в статичний. Радіальні вентилятори можуть бути правого і лівого обертання. Якщо робоче колесо обертається правильно, за годинниковою стрілкою, вентилятор називають правим, а проти годинникової стрілки - лівим. Правильним обертанням робочого колеса є напрямок за ходом розвороту спірального корпуса. Якщо вентилятор обертається неправильно, то його подача різко зменшується, а напрямок потоку повітря залишається незмінним. Отже, радіальні вентилятори - нереверсивні.
Рис.4. Способи з'єднання радіальних вентиляторів з електродвигунами: а - безпосередньо; б, в, д - через проміжний вал; г, є, є - через пасову передачу
Рис.5. Форми лопаток радіальних вентиляторів: а - лопатки, загнуті назад, б - лопатки, що закінчуються радіально в - лопатки, загнуті вперед Вентилятори номерів від 2 до 6,3 включно виготовляються з поворотними корпусами, що дозволяє встановлювати їх в положення, зображені на рис.3, а номерів більше 6,3 - з поворотними і неповоротними корпусами. вентиляційна установка електропривод вентилятор Способи з'єднання радіальних (відцентрових) вентиляторів з електродвигунами наведені на рис.4. Безпосереднє насаджування робочого колеса на вал двигуна допускається лише для малих вентиляторів (до номера 6,3 включно). Залежно від форми лопаток (рис.5) радіальні вентилятори бувають з лопатками: загнутими назад (Р2 < 90 град), що закінчуються радіально (Р2 =90 град) та загнутими вперед (р2 > 90 град). Вентилятори з лопатками, загнутими назад, мають криву тиску, що швидко падає при збільшенні подачі. Тому при зміні гідравлічного опору повітропроводів подача вентилятора змінюється в незначних межах. Споживана потужність цих вентиляторів при зміні подачі в робочій зоні змінюється також незначно. Вентилятори з лопатками, загнутими назад, мають порівняно менший динамічний напір і, як наслідок, менший шум. Вони найбільш економічні. Коефіцієнт корисної дії вентиляторів з лопатками, загнутими назад, становить 0,77 - 0,85, їх використовують у системах припливної вентиляції тваринницьких приміщень. Вентилятори з лопатками, загнутими вперед, мають нестійку характеристику тиску, потужність зростає при збільшенні подачі, що може призвести до перевантаження двигуна (рис.6). Вентилятори з лопатками, що закінчуються радіально, мають характеристики, проміжні між вентиляторами з лопатками, загнутими назад і вперед.
Рис.6. Залежність споживаної потужності вентиляторів від подачі: 1 - радіальний з лопатками, загнутими вперед; 2 - радіальний з лопатками, загнутими назад; 3 – осьовий
Рис.7. Радіальний пиловий вентилятор Радіальні вентилятори призначені для переміщення повітря з механічними домішками (тирса, стружка, полова тощо), вони мають робоче колесо з шістьома довгими, загнутими вперед лопатками (рис.7). Така конструкція робочого колеса практично виключає засмічення вентилятора механічними домішками. Вентилятори мають характеристику тиску, що падає, і криву потужності, що зростає. Розвивають тиск до 2000 - 2500 Па, тобто середній тиск (низький тиск - до 981 ПА, високий - до 11 772 Па). їх використовують також для переміщення чистого повітря. Осьовий вентилятор складається з циліндричного корпуса, в якому розміщене лопаточне робоче колесо пропелерного типу (рис.8). Характерною особливістю осьових вентиляторів є реверсування повітряного потоку при зміні напрямку обертання привідного двигуна. Реверсивні вентилятори мають симетричний профіль лопаток. Це забезпечує однакові енергетичні показники вентиляційної установки при різних напрямках обертання. Осьові вентилятори створюють невеликий статичний тиск (ЗО - 300 Па). Вони широко використовуються у витяжних вентиляційних системах тваринницьких і птахівницьких приміщень. При збільшенні подачі за рахунок зміни гідравлічних опорів споживана потужність осьовим вентилятором зменшується (див. рис.6, крива 3). Для деяких осьових вентиляторів зміна подачі не призводить до зміни споживаної двигуном потужності.
Рис.8. Осьовий вентилятор (а) та конструкція осьового зварноголопаточного (б) і штампованого колеса (є) Радіальні та осьові вентилятори оцінюються аеродинамічними характеристиками. Це сукупність кривих, які визначають залежність повного і статичного тиску, що створюються вентилятором, споживаної ним потужності та повного і статичного коефіцієнтів корисної дії від продуктивності (рис.9). Ці характеристики наводяться в довідковій літературі для кожного номера вентилятора.
Рис.9 Аеродинамічні характеристики вентиляторів а - радіального з лопатками, загнутими назад; б - осьового Режим роботи вентилятора, що відповідає максимальному значенню повного коефіцієнта корисної дії, називають номінальним. Вірогідність роботи вентилятора в номінальному режимі досить мала. Частіше вентилятор працює з дещо більшою або меншою продуктивністю відносно номінального значення. Робочою ділянкою для характеристики вентилятора, що працює з приєднаним повітропроводом, вважають ту частину, на якій повний коефіцієнт корисної дії становить не менш як 0,9 максимального значення ККД (на рис.9 ця ділянка виділена хвилястими лініями). Для порівняння вентиляторів різних типів користуються параметром швидкохідності", який визначається із залежності:
де п - частота обертання лопаточного колеса, об/хв; ф - продуктивність вентилятора, м3/с; Н - повний тиск вентилятора, Па. У радіальних вентиляторів критерій швидкохідності більший при порівняно невеликому діаметрі входу і великій кількості лопаток, а в осьових вентиляторів - при меншому діаметрі втулки і меншому числі лопаток (рис.10). Радіальні вентилятори з лопатками, загнутими назад, мають критерій швидкохідності в межах 50 - 80, а осьові - 120 - 400. Радіальні та осьові вентилятори характеризуються також коефіцієнтом повного тиску ці, який визначають за виразом
де Н - повний тиск вентилятора при номінальному режимі, Па; р - густина повітря, кг/м3 ; и - колова швидкість робочого колеса, м/с.
Рис.10. Конструкції вентиляторів різної швидкохідності: а - малої; б - великої Швидкохідність пу і заокруглене п'ятикратне значення коефіцієнта повного тиску V) / вказуються в позначенні типу вентиляторів. Так, для радіального вентилятора з номером 6,3, коефіцієнтом повного тиску 0,86 і швидкохідністю 75 його тип записується так: В-Ц4-75-6.3 Для осьового вентилятора з коефіцієнтом повного тиску 0,12, швидкохідністю 300 і номером 6,3 тип позначається В-06-300-6,3. Розрахунок вентиляційних установокУ виробничих приміщеннях, де утримуються тварини або птиця, у повітрі містяться надлишкові вуглекислий газ, волога, тепло. В овочесховищах виділяється також надлишкова волога і тепло внаслідок біологічних процесів. Кількість шкідливих домішок у повітрі приміщення є вихідною величиною при визначенні подачі свіжого повітря вентиляційною системою. Залежно від виду шкідливих домішок розрізняють повітрообмін по видаленню надлишкових вуглекислого газу, вологи, тепла. Обмін повітря по видаленню надлишкового вуглекислого газу Ьв г , м3 /год, визначається залежністю
де 1,2 - коефіцієнт, який враховує виділення вуглекислого газу мікроорганізмами, підстилкою тощо; Ат - кількість вуглекислого газу, що виділяється однією твариною, м3 /год; пт - кількість тварин у приміщенні, голів; кв - допустима концентрація вуглекислого газу в повітрі тваринницького приміщення за об'ємом у відносних одиницях, кв = 0,002 - 0,0025; Аа - концентрація вуглекислого газу в припливному атмосферному повітрі, ка = 0,0003. Обмін повітря по видаленню надлишкової вологи Ьв , м3 /год, визначають за виразом:
де 1,1 - коефіцієнт, що враховує випаровування вологи з підлоги; Т^т - кількість водяної пари, що виділяється однією твариною або птицею, г/год; п - кількість тварин або птиці в приміщенні, голів; Т^д п - допустимий вміст водяної пари в приміщенні, де утримуються тварини або птиця, г/м; УГ3 - вміст водяної пари в атмосферному повітрі, г/м. Параметри 1УД п та 1У3 визначають залежностями:
Ввміст водяної пари при повному її насиченні відповідно при оптимальній температурі в приміщенні та при розрахунковій температурі зовнішнього повітря, г/м; фп , ф3 - відповідно відносна вологість повітря в приміщенні та зовнішнього повітря, % (наводиться в довідковій літературі). Для визначення повітрообміну в приміщенні по видален-ню надлишкової теплоти, Ьт , м /год, користуються залежністю
де (? т - кількість вільного тепла, що виділяється однією твариною чи птицею, кДж/год; п - кількість тварин чи птиці в приміщенні, голів; фог - втрати теплоти через зовнішні огорожі (стіни, вікна, стелю тощо), кДж/год; а - температурний коефіцієнт розширення повітря, 1/С, а = 1/273°С *; Су - питома об'ємна теплоємність повітря при температурі 0°С і барометричному тиску 760 мм рт. ст., кДж/м3 ; Су =1,283; 6П ,93 - відповідно температура повітря в приміщенні і зовнішнього,°С. Втрати теплоти <£ наближено можна визначити за залежністю
де V - об'єм приміщення за зовнішніми розмірами, м3 ; ^^ - теплова характеристика приміщення, кДж/м°С год. Для утеплених тваринницьких приміщень д0 = 2,1 - 2,9, для неутеплених о = 2,9 - 5,1 кДж/м·С·год.
Після розрахунків обміну повітря по видаленню надлишкових вуглекислого газу, вологи та теплоти визначають годинну кратність обміну повітря К за найбільшим значенням обміну повітря за виразом. Якщо кратність обміну повітря не більше 3, то приймають вентиляційну систему з природною тягою, а якщо більше 3 - з механічним спонукачем. Для кожного виду тварин і птиці нормами технологічного проектування передбачено мінімальну кількість свіжого повітря на одну тварину або на 1 кг живої маси птиці, за якою визначають мінімально допустиму кратність обміну повітря за годину:
Вираз (10) не повинен бути меншим за вираз (11). Якщо припливна вентиляція здійснюється через один повітропровід круглого перерізу, то його діаметр І), м, визначають за формулою
де V - швидкість руху повітря в повітропроводі, м/с, V = = 5-10 м/с. При виборі вентилятора, крім його подачі, необхідно знати повний напір Н, який визначають за виразом
У більшості випадків радіальні вентилятори працюють з приєднаним повітропроводом, в якому мають місце гідравлічні втрати тиску за рахунок тертя, та місцеві втрати тиску, зумовлені зміною конфігурації повітропроводу. Втрати тиску на тертя АНТ визначають за залежністю:
де X. - коефіцієнт втрат на тертя; І - довжина прямої ділянки повітропроводу, м; 2) г - гідравлічний діаметр повітропроводу, м; р - густина повітря, кг/м3 ; V - швидкість руху повітря, м/с. Коефіцієнт втрат на тертя А. залежить від числа Рейнольд-са Не та відносної шорсткості А повітропроводу. Число Рей-нольдса визначають за формулою
де V - кінематична в'язкість повітря. При температурі повітря + 20 С кінематична в'язкість повітря дорівнює 1,5 10 м /с. Відносна шорсткість - це відношення її абсолютного значення до гідравлічного діаметра. Абсолютна шорсткість повітропроводу з нової прооліфеної сталі становить ОДО - 0,15 мм, оцинкованих стальних труб - 0,10 - 0,15, оцинкованої листової сталі - 0,15 - 0,18, азбоцементних труб - 0,05 - 0,1, з труб, що виготовлені з дерев"яних струганих дощок - 0,15 - 0,3 мм. Знаючи абсолютну шорсткість, гідравлічний діаметр повітропроводу і число Не, знаходять коефіцієнт втрат на тертя:
Гідравлічний діаметр повітропроводу £) г визначають так: Ог = 4. Р/П, де Р і П - відповідно площа, м, і периметр, м, поперечного перерізу повітропроводу. Для повітропроводів круглого поперечного перерізу гідравлічний діаметр дорівнює діаметру повітропроводу. При малих значеннях Ее (ламінарний потік) вплив відносної шорсткості стає незначним. При цьому вираз (15) записують так:
При великих значеннях Ее (турбулентний потік) значення виразу 100/і? е дуже мале і ним нехтують. При цьому коефіцієнт втрат визначають за залежністю
Вираз (17) використовують при наближених розрахунках шорстких повітропроводів. При температурі 20 С, барометричному тиску 760 мм рт. ст. і відносній вологості 50 % густина повітря р = 1,2 кг/м3 . Втрати тиску, зумовлені зміною конфігурації повітропроводу, визначають за формулою
Розрахунковий тиск вентиляційної установки визначають за виразом (13). За розрахунковою максимальною подачею і розрахунковим тиском вибирають вентилятор, використовуючи аеродинамічні характеристики вентиляторів певної швидкохідності. При цьому розрахункові значення подачі і повного тиску повинні знаходитись у робочій зоні аеродинамічної характеристики вентилятора. Для одержання робочої точки на характеристиці Н - Q необхідно розрахувати характеристику повітропроводу за виразом
де Н - сумарні втрати тиску в повітропроводі, Па; К - параметр, що характеризує гідравлічний опір повітропроводу; п - показник степеня. Для ламінарного потоку п = 1, для турбулентного - п = 1,7'5 - 2. Параметр К визначають за формулою:
де / - довжина повітропроводу одного діаметра, м; X - коефіцієнт втрат на тертя; І) г - гідравлічний діаметр повітропроводу, м; £, - сума коефіцієнтів місцевих опорів; р - густина повітря, кг/м3 . Робочий режим вентилятора для даного повітропроводу визначається рівністю створюваного повного тиску Н повному гідравлічному опору (рис.11, точка А). Якщо точка А виходить за робочу зону або вентилятор не забезпечує необхідну подачу, потрібно зменшити гідравлічний опір повітропроводу. Для зменшення опору на кінці повітропроводу встановлюють дифузор, який зменшує швидкість витікання повітря і тим самим зменшуються гідравлічні втрати (рис.11, точка В). Зміна кутової швидкості вентилятора не призводить до зміни характеристики повітропроводу. При цьому зміняться лише подача і тиск вентилятора.
Рис.11. Режим роботи вентилятора: 1 - без дифузора; 2 - з дифузором
Регулювання параметрів вентилятораУ виробничих умовах іноді виникає необхідність за допомогою певних пристроїв без зупинки вентиляційної установки змінювати подачу вентилятора. При цьому зміняться тиск, що розвиває вентилятор, споживана привідним двигуном потужність та коефіцієнт корисної дії. Досить поширеним способом регулювання параметрів вентиляційної установки є дроселювання, тобто встановлення перед вентилятором або за ним заслінки, що частково перекриває повітропровід. При цьому збільшується коефіцієнт місцевих втрат і, як наслідок, характеристика повітропроводу стає більш стрімкою (рис.12). Як видно з рисунка, регулювання вентиляційної установки за допомогою заслінки є неекономічним, тому що викликає зниження коефіцієнта корисної дії. При дроселюванні вентиляційних установок з радіальними вентиляторами потужність, споживана двигуном, зменшується. Отже, привідні двигуни радіальних вентиляторів запускають при закритій заслінці на повітропроводі (якщо вона є). Осьові вентилятори при дроселюванні споживають більшу потужність, тому що характеристика Р = / (ф) у них є нисхідною залежністю (див. рис.9). Тому пуск установок з осьовими вентиляторами здійснюють при максимальній подачі. Як уже відзначалось, встановлення дифузора призводить до зменшення опору повітропроводу і збільшення продуктивності вентилятора відносно розрахункового режиму (див. рис.11, точка В). При цьому збільшується розрахункова потужність для радіальних вентиляторів. Регулювати тиск чи подачу вентиляторної установки можна вмиканням на один повітропровід двох вентиляторів меншої потужності. Вентилятори можна з'єднувати паралельно і послідовно. Для забезпечення стійкої паралельної роботи двох вентиляторів на робочій ділянці аеродинамічної характеристики повинна бути така ділянка, на якій при збільшенні продуктивності створюваний вентилятором тиск зменшується. Така вентиляційна установка більш надійна з точки зору резервування. При послідовному з'єднанні вентиляторів один із них може регулюватись дроселюванням аж до повного перекривання. Енергетичні показники установки будуть вищі, ніж при дроселюванні одного ізольованого вентилятора. Сумарні характеристики вентиляторів при їх послідовному та паралельному з'єднанні наведені на рис.13. В умовах сільськогосподарського виробництва найчастіше регулювання параметрів вентилятора здійснюють зміною частоти обертання. Для цього використовують дво- і тришвидкісні двигуни (припливні системи вентиляції) та регулювання частоти обертання спеціальних двигунів зміною напруги на статорі. При використанні багатошвидкісних двигунів частота обертання визначається кількістю пар полюсів:
де р - число пар полюсів; / - частота струму; з – ковзання
Рис.13. Сумарні характеристики двох вентиляторів: а - послідовне з'єднання; б - паралельне з'єднання При зміні частоти обертання п вентилятора продуктивність (?, повний тиск Н, потужність Р та коефіцієнт корисної дії г| змінюються за залежностями:
Залежності (24) справедливі при незмінному діаметрі робочого колеса вентилятора і незмінній густині повітря. При зміні частоти обертання колеса вентилятора характеристика повітропроводу не змінюється і робоча точка вентилятора переміститься по параболі, що збігається з характеристикою повітропроводу (рис.14). При цьому коефіцієнт корисної дії вентилятора залишається незмінним. Потужність двигуна при зміні частоти обертання змінюється за кубічною залежністю. У двошвидкісних двигунів серії АИ є виконання для привода робочих машин з вентиляторною механічною характеристикою. Характерною ознакою цих двигунів є те, що потужність у них на вищій частоті обертання значно більша за потужність на нижчій частоті обертання. Для двигунів з числом полюсів 4/2, 8/4 діапазон регулювання становить 1: 2. При такому діапазоні регулювання потужність на вищій частоті обертання визначається залежністю
Для двигунів з числом полюсів 8/6 діапазон регулювання дорівнює 1: 1,33. Потужність на вищій частоті обертання визначається так:
Рис.14. Регулювання вентилятора зміною частоти обертання лопаточного колеса Співвідношення потужностей (25), (26) дотримуються в двошвидкісних двигунах, призначених для привода вентиляторів. Так, двигуни АИР112М4/2УЗ та АИР112М8/6УЗ мають відповідно співвідношення потужностей. Отже, згадані двигуни при зміні частоти обертання працюють практично з повним навантаженням на відміну від двошвидкісних двигунів загального призначення, в яких потужність на вищій частоті обертання більша на ЗО - 50 % за потужність при нижчій частоті обертання. Тому двошвидкісні двигуни загального призначення для привода вентиляторів застосовувати не слід. При нижчій частоті обертання вони будуть працювати з малим навантаженням і, як наслідок, з низькими енергетичними показниками. Осьові вентилятори серії ВО, що використовуються для витяжної системи вентиляції тваринницьких, птахівницьких та інших виробничих приміщень, мають регулювання подачі повітря. Регулювання подачі вентиляторів здійснюється за рахунок зміни частоти обертання спеціальних двигунів АИРП та 4АПА, якими комплектуються вентилятори. Двигуни АИРП мають номінальні потужності 0,25 і 0,37 кВт, а 4АПА відповідно 0,37; 0,55; 1,1 кВт. Синхронна частота обертання наведених двигунів становить 1000 об/хв, критичне ковзання приблизно 0,5. Витяжна вентиляційна система тваринницьких, птахівницьких та інших виробничих приміщень комплектується осьовими вентиляторами ВО-Ф-5,6А; ВО-Ф-7ДА; ВО-Ф-8,5 відповідно з двигунами 4АПА80-06У2, 4АПА80А6У2, 4АПА90£6У2. Частоту обертання електровентиляторів регулюють, змінюючи напругу на статорній обмотці двигунів. Напругу змінюють ступенями за допомогою автотрансформатора або плавно тиристорним перетворювачем напруги. Згадані двигуни обдуваються вентиляторами, які приводяться ними в рух. Станина двигунів не має оребрення. Літера П в позначенні серії двигуна вказує на те, що він продувається вентилятором серії ВО, насадженим безпосередньо на вал двигуна. Якщо змінювати напругу на статорній обмотці згаданих двигунів без навантаження (без вентилятора), то кутова швидкість ротора практично змінюватись не буде. Пояснюється це тим, що напруга не входить безпосередньо у вираз по визначенню кутової швидкості [со = юо (1-з)]. При зміні напруги критичне ковзання двигуна залишається практично незмінним (при незмінному значенні Хк ) і дорівнює
Зміна напруги призводить до зміни коефіцієнта жорсткості Р механічної характеристики двигуна, який визначається за виразом:
де М - момент двигуна; ю - кутова швидкість. Момент двигуна залежить від таких параметрів:
де Е2 - електрорушійна сила в обмотці ротора при ковзанні, рівному одиниці. Підставивши значення Е2 та 8 у вираз (29), одержимо:
Взявши похідну з виразу (30), одержимо коефіцієнт жорсткості механічної характеристики асинхронного двигуна:
Якщо вважати параметри ротора сталими, то коефіцієнт жорсткості механічної характеристики р знижується при зменшенні магнітного потоку в квадратичній залежності. Магнітний потік Ф прямо пропорційно залежить від напруги на статорі двигуна. Отже, зміна напруги на статорі призводить до значного зменшення коефіцієнта жорсткості та перевантажувальної здатності двигуна. При вентиляторній механічній характеристиці робочої машини перевантажувальна здатність залишається достатньою для стабільної роботи електровентилятора. Перехід на штучні механічні характеристики двигуна супроводжується збільшенням його ковзання, яке при низьких напругах стає більшим за критичне ковзання. При цьому система двигун - вентилятор залишається статично стійкою.
Рис.15. Залежність частоти обертання електровентилятора від напруги на статорі двигуна Робота двигуна при великих ковзаннях не призводить до появи струмів більше номінального значення, оскільки споживана вентилятором потужність при цьому різко знижується (24). Залежність частоти обертання двигуна при різних значеннях напруги наведено на рис.15. Така система регулювання подачі вентилятора забезпечує плавну зміну частоти обертання в діапазоні 1: 6. Залежність частоти обертання від напруги на статорі двигуна електровентилятора (рис.16) називають регулювальною характеристикою. У витяжних вентиляційних системах, що працюють без повітропроводів, продуктивність системи регулюють вмиканням певної кількості вентиляторів. За такою схемою працюють дахові вентилятори, тобто радіальні або осьові вентилятори, розміщені на вертикальній осі в короткому патрубку в отворі покрівлі, а також осьові вентилятори серії ВО, що розміщуються в нижній частині поздовжніх стін тваринницьких, птахівницьких або інших виробничих приміщень.
Вибір вентилятора та електропривода до ньогоДля вибору типу і розміру вентилятора необхідно знати розрахункові значення обміну повітря та повного тиску, які визначаються залежностями (4), (5), (8) та (21). Вентилятор повинен мати подачу С} та тиск Н у робочій зоні не менше максимального розрахункового обміну повітря і розрахункового значення повного тиску. Для припливної вентиляції в сільському господарстві, як правило, використовують радіальні вентилятори з лопатками, загнутими назад, коефіцієнтом повного тиску \\і = 4 і швидкохідністю пу = 75 (В-Ц4-75). За розрахунковими подачею повітря і тиском, користуючись аеродинамічними характеристиками згаданих вентиляторів, вибирають номер вентилятора, який забезпечує потрібні параметри. Для визначення робочої точки вентиляторної установки розраховують характеристику повітропроводу за виразами (21), (22). Точка перетину цієї характеристики з кривою Я - ^ визначає робочу точку, яка повинна знаходитись у робочій зоні вентилятора, тобто в зоні, де коефіцієнт корисної дії вентилятора не менше 0,9г) тах При роботі вентилятора завжди виникає шум, який не повинен перевищувати значень, допустимих санітарними нормами для відповідних приміщень. Вибір вентилятора передбачає перевірку його шумової характеристики. У ряді випадків надмірно високий рівень шуму обмежує можливості використання вентилятора з необхідними аеродинамічними характеристиками та потребує спеціальних заходів по зниженню шуму, що ускладнює вентиляційну установку та збільшує її вартісні показники.
Рис.17. Шумова характеристика відцентрового вентилятора Ц4-70-5: 1 - канал нагнітання; 2 - канал всмоктування При роботі вентилятора мають місце коливні процеси аеродинамічного походження внаслідок виникнення вихрів в міжлопаткових каналах, пульсацій тиску і швидкості від неоднорідності потоку, а також автоколивань при малих швидкостях системи вентилятор - повітропровід. Коливні процеси аеродинамічного походження є джерелом шуму вентилятора. Крім того, при роботі вентиляторної установки має місце механічний шум, який створюється підшипниками вентилятора та його незбалансованістю. Шум електродвигуна та передавача. При проектуванні вентиляційної установки приймають до уваги фактори, що знижують її шум. Дослідним шляхом встановлено, що радіальні вентилятори з лопатками, загнутими назад, мають рівень звукової потужності на 3 - 8 дБ менше при режимі максимального ККД, ніж вентилятори такого самого габариту з лопатками, загнутими вперед. Під час налагодження вентиляційної установки перевіряють балансування системи вентилятор - двигун. Незбалансована установка передає вібрації по конструкціях приміщення і цим самим створює додатковий шум вентиляторної установки. З метою зменшення шуму вентилятор із всмоктувальним і нагнітальним повітропроводами з'єднуються за допомогою гнучких вставок з брезенту. Як видно з рис.17, зниження частоти обертання робочого колеса вентилятора дає можливість знизити шум. Якщо перераховані заходи не дають можливості довести рівень шуму до норми, використовують спеціальні облицювальні шумопоглинальні матеріали та підкладки під вентиляторну установку. Відомо, що електропривід включає перетворювальний пристрій, двигун, передавальний пристрій та апаратуру захисту і керування. Перетворювальним пристроєм для електропривода вентилятора може бути випрямляч змінної напруги в постійну, автотрансформатор, тиристорний регулятор напруги змінного струму, регулятор частоти. У припливних вентиляційних установках сільськогосподарського призначення, як правило, використовують електропривід змінного струму без перетворювального пристрою, тобто двигун вмикається безпосередньо в мережу. При необхідності плавного регулювання подачі припливного вентилятора необхідно передбачати перетворювальний пристрій, прийнявши регульований електропривід постійного або змінного струму. Електропривід витяжних систем вентиляції, як правило, має перетворювальний пристрій, автотрансформатор або тиристорний регулятор напруги, які відповідно забезпечують ступінчасте і плавне регулювання подачі осьових вентиляторів. Припливний вентилятор у більшості випадків розміщується у вентиляційній камері виробничого приміщення, де оточуюче середовище не містить шкідливих домішок. Тому електричні двигуни приймають загального використання (АИР. УЗ), що мають ступінь захисту /Р44, конструктивне виконання за способом монтажу /М1081. Електровентилятори витяжної системи вентиляції встановлюють у виїмках стін виробничого приміщення. Здебільшого це приміщення для утримання худоби та птиці, що відносяться до особливо сирих, з хімічно активним середовищем. Привід осьових вентиляторів витяжної системи здійснюється спеціальними електродвигунами 4АПА80, 4АПА90 та АИРП80, які стійкі проти вологи, хімічних речовин та впливу низьких температур. Ступінь захисту згаданих двигунів 7Р55, конструктивне виконання за способом монтажу - /М9241. Якщо технологічний процес допускає ступінчасте регулювання подачі припливного вентилятора, то в цьому випадку електропривід проектується без перетворювального пристрою, а необхідну подачу забезпечують багатошвидкісним двигуном. Коли подачу припливної вентиляції не потрібно регулювати, приймають одношвидкісний нерегульований двигун. При виборі електричних модифікацій двигунів для при-вода вентиляторів враховують привідні характеристики вентилятора. Вентилятор має початковий статичний момент 10 - 15 % від номінального статичного моменту. Отже, з точки зору пускового моменту, електродвигун повинен бути загального використання. У витяжних системах вентиляції, з метою плавного регулювання подачі вентилятора, використовують електричні двигуни з підвищеним ковзанням. Вентилятор краще всього з'єднувати з двигуном безпосереднім насаджуванням його на вал двигуна. Таке з'єднання використовують для осьових вентиляторів серії ВО та радіальних вентиляторів з номерами до 6,3. Еластичні муфти, як передавальні пристрої, використовувати небажано з причини можливої неспіввісності установки при монтажі. Неспіввіс-ність призводить до значних вібрацій, додаткових навантажень на підшипники двигуна і передчасний вихід їх з ладу. Як передавальний пристрій у приводі вентилятора використовують клинопасову передачу. При виборі електродвигуна для привода вентилятора за потужністю використовують навантажувальну діаграму вентилятора, яка випливає з балансу потужності системи двигун - вентилятор:
де Рд - потрібна потужність двигуна, Вт; Рсв - статична потужність вентилятора, Вт; / - зведений момент інерції системи, кг м; ю - поточні значення кутової швидкості, Вентилятор працює в режимі 51 і тому можна розглядати навантажувальну діаграму для усталеного режиму. При цьому ліва частина виразу (32) буде дорівнювати нулю. Статична потужність вентилятора визначається залежністю
де Н - відповідно подача і повний тиск вентилятора, що визначаються точкою перетину характеристики вентилятора Н - Я і характеристики повітропроводу; г|в - коефіцієнт корисної дії вентилятора, який враховує гідравлічні втрати потужності в робочому колесі і на перетікання повітря через зазори всередині вентилятора. Якщо в залежність (33) підставити нульове значення подачі, то статична потужність вентилятора також буде дорівнювати нулю. Насправді, при закритому повітропроводі, коли подача дорівнює нулю, вентилятор споживає потужність, зумовлену тертям робочого колеса об повітря. Це так звана нульова потужність, яку аналітично визначити досить складно. Отже, вираз (33) не можна вважати в повній мірі аналітичним. Номінальна потужність двигуна Рнд визначається співвідношенням
де г) п - коефіцієнт корисної дії передачі; к - коефіцієнт запасу потужності, який враховує неточності при розрахунках повного тиску вентилятора, характеристики повітропроводу та інші непередбачені відхилення при проектуванні вентиляційної установки. Введення коефіцієнта запасу к у залежність (34) виключає необхідність приймати запаси по параметрах подачі і тиску вентилятора. Величина коефіцієнта запасу для радіальних вентиляторів з лопатками, загнутими назад (В-Ц4-75), та для осьових вентиляторів має такі значення:
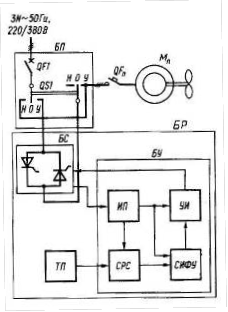
При виборі електричного двигуна за частотою обертання необхідно враховувати, що радіальні вентилятори допускають збільшення частоти обертання відносно номінального значення на 10 %. Електродвигуни вентиляторів працюють в усталеному режимі при незмінному навантаженні. Захисні апарати вентиляційної установки відповідно до Правил устрою електроустановок (ПУЕ) повинні забезпечувати захист від струмів три - та однофазного короткого замикання. Цю функцію у більшості випадків виконують електромагнітні розчіплювачі автоматичних вимикачів. Якщо розрахунки показують, що струм однофазного короткого замикання не вимикається електромагнітним розчіплювачем, то необхідно приймати автоматичний вимикач з комбінованим розчіплювачем. При цьому автоматичний вимикач вимкне пошкоджену електроустановку за умов, що струм однофазного замикання перебільшує номінальний струм розчіплювачів вимикача не менше, ніж у 3 рази. 2. Комплекти обладнання для автоматичного керування вентиляційними установкамиДля забезпечення потрібного повітрообміну та створення необхідного мікроклімату в тваринницьких і птахівницьких приміщеннях застосовують різноманітні комплекти вентиляційного обладнання, які за призначенням поділяють на три групи: припливні, витяжні та комбіновані. Найбільшого розповсюдження набули витяжні системи вентиляції, які видаляють відпрацьоване повітря з приміщення разом із шкідливими домішками (аміак, сірководень, вуглекислий газ, надлишкова волога). Приплив свіжого повітря здійснюється через спеціальні шахти, вікна, двері, що спрощує систему вентиляції. Типовим є проект вентиляційного обладнання "Кли-мат-4М", який залежно від номера осьового вентилятора поділяється на "Климат-45М" з вентиляторами ВО-Ф-5,6А та "Климат-47М" з вентиляторами ВО-Ф-7ДА. Кількість вентиляторів у комплекті залежить від розрахункової подачі повітря і може коливатися від 6 до 24. Крім вентиляторів, до комплекту входять автоматичні вимикачі АЕ2016 для кожного вентилятора та станція керування ТСУ-2-КЛУЗ. Станція керування забезпечує плавне регулювання частоти обертання асинхронних електродвигунів витяжних вентиляторів з метою автоматичного підтримання температури повітря у виробничих сільськогосподарських приміщеннях. Номінальний струм станції - 63 А, діапазон регулювання вихідної напруги - 6: 1, відхилення температури від заданого значення, що викликає зміну вихідної напруги від мінімального до найбільшого значення, дорівнює 4°С. Система керування споживає не більш ніж 40 Вт. Пристрій ТСУ-2-КЛУЗ ("Климатика-1") являє собою тиристорний регулятор напруги з цифровою системою керування на інтегральних мікросхемах, який забезпечує плавну зміну вихідної напруги за принципом фазового регулювання залежно від значення температури повітря в приміщенні. Передбачено ручний та автоматичний режими керування. Пристрій складається із 2 ящиків: блока регулятора, до якого входить силовий блок та блок керування, і блока перемикача. Останній виконує функції обвідного пристрою, а також захисту пристрою від коротких замикань. При положенні перемикача режиму роботи "Н" - некерований режим напруга подається на електродвигуни, обминаючи пристрій регулювання. У положенні "Р" - регульований режим двигуни одержують живлення з блока тиристорів. Блок регулятора конструктивно виконаний у вигляді ящика одностороннього обслуговування. Особливістю конструкції ящика є те, що силові тиристори змонтовані на одному груповому охолоджувачі з застосуванням спеціальних діелектричних прокладок з високою теплопровідністю. У силовому блоці встановлені шість силових тиристорів, захисні ДС-ланцюжки, трансформатори системи керування, вузол захисту від перенапруги. Блок керування складається з двох друкованих плат та панелі керування. На панелі керування розміщені основні органи керування та сигналізації: резистор та блок перемикачів діапазонів "Установка температури"; блок перемикачів "Датчики" та "Ручне", положення "1", "2" якого відповідають кількості під'єднаних термоперетворювачів (датчиків) в автоматичному режимі роботи, а положення "Ручне" - ручному режиму роботи пристрою; резистор "Мінімальна напруга", резистор та лампа "Аварійне відхилення температури", резистор "Ручне керування". Датчиками температури є термоперетворювачі типу ТСМ (до 2 шт.), що ввімкнені паралельно і розподілені по довжині приміщення.
Рис. 18. Функціональна схема пристрою "Климатика-1" Функціональна схема пристрою наведена на рис.18, де прийняті такі позначення: БР - блок регулятора, БП - блок перемикача, ТП - термоперетворювачі, БС - блок силовий, БУ - блок керування, ИП - джерело живлення, СРС - система регулювання та сигналізації, СИФУ - система імпульсно-фазового керування, УИ - підсилювач імпульсів. Силовий блок складається з трьох пар тиристорів типу Т123-250-9-41, що ввімкнені зустрічно-паралельно. Для захисту тиристорів від перенапруг мережі та комутаційних перенапруг у силовому блоці є спеціальний вузол захисту, що складається з ДС-кіл та варисторів. Тут же встановлений трансформатор живлення системи керування та синхронізації імпульсів керування з фазами мережі живлення. Структурна схема системи регулювання та сигналізації наведена на рис. 19. Вона включає вимірювальний міст, в одно з плеч якого ввімкнені термоперетворювачі. Для балансування моста в разі під'єднання різної кількості термоперетворювачів, а також для забезпечення постійного значення чутливості моста при різній кількості термоперетворювачів за рахунок підтримання постійного значення напруги живлення моста служить вузол Д. Задатчиком температури УТ є перемикач діапазону та резистор "Установлення температури". Задатчик дозволяє виконувати установлення температури від 0°С до 40°С. Для забезпечення точності установлення задатчик побудований за таким принципом: резистором і? 6 здійснюється установлення температури від 0 до 10°С. Діапазон зміни температур задається блоком перемикачів (чотири перемикачі з позначками "0°С", "10°С", "20°С", "ЗО°С"). Установлення температури визначається сумою величин положення резистора та позиції перемикача. З вимірювального моста знімається сигнал розбалансу, пропорційний величині відхилення температури в приміщенні від установленого значення, який підсилюється підсилювачем У1. Підсилений сигнал з виходу У1 надходить на вхід підсумовуючого підсилювача У2, де складається з сигналом базової напруги, що надходить від джерела 15 В і відповідає рівню вихідної напруги при врівноваженому мості (сигнал "Норма"). Це приблизно відповідає середній швидкості обертання вентиляторів і забезпечує оптимальну роботу пристрою при позитивному та негативному відхиленнях температури від встановленого значення.
Рис. 19. Структурна схема системи регулювання та сигналізації Це видно з робочої характеристики пристрою (рис. 20), яка визначає залежність вихідної напруги С/вих від відхилення температури А і відносно встановленого значення. Величина напруги *Увих . тіп визначається зоотехнічними вимогами з умов мінімально допустимого повітрообміну і задається резистором "Мінімальна напруга" на панелі керування. Шкала цього резистора безрозмірна з поділками від 0 до 10.
Рис. 20. Робоча регулювальна характеристика станції "Климатика-1" Сигнал керування порівнюється з рівнем, що заданий резистором "Мінімальна напруга" на елементі Д1 і виконаний на двох діодах.
Схема сигналізації "Жарко", "Норма", "Холодно", а також "Аварійне відхилення температури" виконана на порогових елементах П31 та П32 та світлодіодах. При негативному відхиленні температури від встановленого значення більше заданого загоряється світлодіод "Холодно", одержує живлення котушка реле К, яке вмикає лампу "Аварійне відхилення температури" та дає команду на введення в дію додаткових джерел тепла (наприклад, електрокалорифера). Режим комутації реле К: 36 В, 0,3 А постійного або змінного струмів. При підвищенні температури на 2± 1 С сигналізація "Аварійне відхилення температури" тадодаткові джерела тепла вимикаються, загоряється світлодіод "Норма". При позитивному відхиленні температури вище норми спрацьовує сигналізація "Аварійне відхилення температури" та загоряється світлодіод "Жарко". Величина допустимого відхилення температури в межах від ± 2°С до ± 6°С може бути задана відповідним резистором. Система імпульсно-фазового керування СИФУ складається: 3вузлів синхронізації, імпульсно-фазового керування та захисту. Вузол синхронізації, побудований на транзисторнихключах, узгоджує імпульси з фазними напругами мережі. Вузол імпульсно-фазового керування включає аналогоімпульсний перетворювач, чотирирозрядні лічильники, генератор частотного заповнення імпульсів та підсилювачів - розподільників імпульсів. Аналого-імпульсний перетворювач - це генератор імпульсів, який виробляє послідовно короткочасні імпульси, період чергування яких відповідає величині сигналу керування. Вихідні імпульси генератора надходять на лічильні входи лічильників. При кожному переході синхронізуючої напруги через нуль лічильники повертаються у вихідне положення, після чого знову починають підраховувати імпульси, що надходять від генератора. Тривалість імпульсу дорівнює 180 електричних градусів. Сформований сигнал у вигляді певної кількості імпульсів надходить на керуючі електроди силових тиристорів, завдяки чому змінюється фаза їх відкриття і вихідна напруга (фазове керування). Вузол захисту виконує функції захисту при зворотній черговості фаз мережі, а також при обриві однієї з фаз шляхом зняття імпульсів керування. Спрацювання вузла захисту супроводжується світловою сигналізацією (гасне світлодіод "Ввімкнено"). Для забезпечення можливості пуску двигунів вентиляторів у режимі малих швидкостей, коли вихідна напруга пристрою менше напруги, необхідної для запуску, передбачений вузол, який формує при вмиканні пристрою імпульс керування, що в свою чергу викликає короткочасне збільшення вихідної напруги до величини, достатньої для запуску електровентиляторів. Контроль роботи системи керування можна здійснити, вимірюючи рівень та форму сигналу в контрольних точках пристрою, які задані в інструкції. Це дозволяє за допомогою осцилографа провести діагностику та необхідний ремонт. Перевагою станції керування "Климатика-1" є також те, що блок керування розміщений на спеціальній платі, яка з'єднана з іншими блоками через штепсельний роз'єм і може бути легко замінена. Модернізована тиристорна станція керування типу ТСУ-ЗКЛУЗ призначена для роботи в системі "Климат-4М" і виконує ті самі функції. Основна її відмінність - застосування в системі керування мікро-ЕОМ, що відносить дану станцію до продукції особливої складності. Пристрій забезпечує чотири режими роботи: ручний, програмування, автоматичний та "Обвод". У ручному режимі ступені частоти обертання задає оператор. У режимі програмування здійснюється ввід у постійний запам'ятовуючий пристрій (ПЗУ) даних настроювання, які визначають роботу в автоматичному режимі. В автоматичному режимі виконується регулювання частоти обертання електровентиляторів у функції температури повітря в приміщенні. У режимі "Обвод" здійснюється вимикання силового блока тиристорів та панелі керування, а під'єднання навантаження до мережі виконується через автоматичні вимикачі. Пристрій у режимі програмного керування може здійснювати зміну заданої температури в приміщенні до 90 діб, що забезпечує температурний режим протягом циклу вирощування молодняку, коли відповідно до його росту температура утримання зменшується. Силовий блок, що складається з шести тиристорів, аналогічний пристрою ТСУ-2КЛ. Панель керування включає однокристальну мікро-ЕОМ і виконує функції формування імпульсів керування тиристорами та виконавчими реле. У порівнянні з попередньою системою вентиляції серії "Климат-4", де регулювання частоти обертання вентиляторів здійснюється зміною підведеної напруги, що подається від певних відпайок автотрансформатора, система "Климат-4М" має такі переваги: · вилучення зі схеми автотрансформатора АТ-10 потужністю 10 кВ А зменшує втрати електроенергії на 20 %, одночасно зменшуючи витрати міді і сталі та загальну металоємність комплекту; · зменшення кількості релейно-контактних елементів у схемі (при вилученні 6 електромагнітних пускачів та 2 терморегуляторів з 4 реле) зменшує витрати дорогоцінних контактних металів та витрати на обслуговування; · плавне регулювання напруги замість триступінчастого дає можливість більш точно підтримувати температуру в приміщенні та вибирати економічніший режим. Однак, тиристорне регулювання напруги спричиняє живлення електродвигунів від не синусоїдальної напруги, що погіршує режим їх експлуатації та створює радіоперешкоди для приймачів, які живляться від однієї мережі з "Клима-тикою-1". Тому поряд з тиристорними станціями керування розроблена модернізована станція серії ШОА, де автотрансформатор залишений у схемі, число груп вентиляторів не регулюється, а зміна напруги живлення забезпечує не три, а шість частот обертання електровентиляторів. Це наблизило регулювання до плавного. У схемі станції використано два терморегулятори, один з яких контролює температуру всередині приміщення за трьома позиціями "Вище норми", "Норма", "Нижче норми", а другий - температуру зовнішнього середовища за межами приміщення, за тими самими трьома позиціями. За співвідношенням позицій терморегуляторів всередині приміщення і зовні виробляється сигнал для подачі відповідної напруги на електровентилятори. Наприклад, ступеням швидкості від першої до шостої відповідають напруги 70, 90, 110, 160, 220, 380 В. Комбіновані припливно-витяжні вентиляційні установки ПВУ-4М та ПВУ-6М призначені для вентиляції та опалення тваринницьких приміщень. Комплекс ПВУ-6М використовується переважно у пташниках. До складу комплексу входять по шість припливно-витяжних установок, в яких суміщені подача свіжого і видалення відпрацьованого повітря. Переміщення повітря забезпечується двоконтурним робочим колесом 2 (рис.21) вентилятора з двома робочими лопатками.
Рис.21. Функціональна схема припливно-витяжної установки ПВУ-М: 1 - кільцевий канал; 2 - робоче колесо вентилятора; З - внутрішній повітропровід; 4 - електронагрівачі; 5 - корпус; 6 – заслінки Внутрішні лопатки переміщують відпрацьоване повітря по внутрішньому повітропроводу. Зовнішні - свіже повітря по кільцевому каналу 1 між корпусом 5 та внутрішнім повітропроводом 3. Змішувальні заслінки 6 забезпечують рециркуляцію повітря. Для підігріву повітря в холодну пору року установки мають нагрівні елементи 4. Через стінки внутрішнього повітропроводу відбувається теплообмін між потоками відпрацьованого і свіжого повітря, завдяки чому 5 - 7 % теплоти внутрішнього повітря передається припливному повітрю, що забезпечує деяку економію енергоресурсів. Схема керування установкою ПВУ-4М наведена на рис.22. Система керування забезпечує закриття регулюючих заслінок та регулювання потужності нагрівних елементів установкою за л-законом при зниженні температури в приміщенні нижче заданого значення і відкривання заслінок при підвищення температури вище заданого значення. Керування електродвигунами МІ - МЗ вентиляторів здійснюється кнопковими постами 8В1 - 8В6. Нагрівні елементи можуть бути ввімкненими тільки після вмикання вентиляторів, для чого автоматичні вимикачі (?. Р1 - фРЗ обладнані незалежними розчіплювачами. Вибір режиму керування нагрівними елементами здійснюється перемикачем (35. В автоматичному режимі напруга живлення на нагрівні елементи подається через блок силових тиристорів У81 - 754, які ввімкнені в дві фази мережі зустрічно-паралельно. Регулюючі заслінки приводяться в дію виконавчим механізмом М4. Керування регулюючими заслінками та потужністю нагрівних елементів відбувається за командами терморегулятора А1. На вхід регулятора А1 подається сигнал від датчика температури КК, який розміщується в зоні життєдіяльності тварин чи птахів.
Рис.22. Схема керування припливно-витяжною установкою ПВУ-4М Сигнал термоперетворювача порівнюється з системою за-датчика температури і формується сигнал непогодження. На виході регулятор формує імпульси, які чергуються з паузами відповідно до величини сигналу непогодження. Імпульси через реле К\ і К2 керують роботою виконавчого механізму М4. Виконавчий механізм відкриває або закриває регулюючі заслінки, змінюючи частку зворотної теплоти, що подається в приміщення. Якщо при досягненні регулюючими заслінками положення "Норма рециркуляції" (коли спрацює кінцевий вимикач 5ф2) температура в приміщенні залишається нижчою від заданої, то реле ІСЗ відповідно до команд регулятора А1 починає відкривати тиристори У81 - У8А і через них подавати напругу на нагрівні елементи ЕК1 - ЕКЗ. Якщо і після цього температура в приміщенні продовжує знижуватись і досягне гранично допустимого значення, встановленого на регуляторі А1, увімкнеться реле Я4 і через виконавчий механізм М4 встановить регулюючі заслінки в положення "100 рециркуляція". При цьому все тепле повітря буде повертатися в приміщення. Коли температура в приміщенні буде підвищуватись, починає діяти зворотний алгоритм регулювання. Захист електродвигунів вентиляторів від аварійних режимів здійснюється фазочутливими пристроями захисту Р1, Р2, РЗ. Нагрівні елементи від струмів короткого замикання захищені автоматичними вимикачами С) Р1 - С^РЗ, а тиристори - плавкими запобіжниками РЇЛ, РІІ2. Апарати керування та захисту установки ПВУ-4М змонтовані в шафі керування, при цьому одна шафа обслуговує три установки. Одна установка ПВУ-4М забезпечує подачу повітря в приміщення на припливі - 5 тис. м3 /год, на відпливі - 4,5 тис. м3 /год. Встановлена потужність електронагрівників дорівнює 15 кВт. Осьовий вентилятор приводиться від електродвигуна потужністю 1,1 кВт, механізм привода заслінок - від мотор-редуктора з двигуном потужністю 0,55 кВт. Особливості автоматизованого електропривода вентиляційних установок в інших технологічних процесахВентиляційні установки з електроприводом широко застосовуються в багатьох технологічних процесах сільськогосподарського виробництва. Використовують їх для сушіння та активного вентилювання зерна, малосипучих матеріалів, в овоче- та фруктосховищах, спорудах захищеного ґрунту. Основною відмінністю цих установок є специфічні вимоги до режиму роботи та керування, що зумовлює особливості в схемах керування та принципах автоматизації. Установка УВС-16А призначена для досушування сіна за допомогою вентилятора з електродвигуном потужністю 15 кВт. Схема керування установкою наведена на рис.23.
Рис.23. Схема керування установкою для сушіння сіна типу УВС-16А У ручному режимі (тумблер 51 у положенні "Р") керування пускачем КМ, який подає живлення на двигун, здійснюється кнопками 52 та 53. В автоматичному режимі (положення "А") пуск та зупинка електродвигуна М привода вентилятора відбувається залежно від вологості атмосферного повітря за сигналом А1. Схема керування визначає відносну вологість повітря з корекцією за температурою, порівнює цю величину з заданою і видає сигнал на вмикання або вимикання вентилятора. Електронний блок А1, що працює з первинним датчиком вологості К^ та температури Н{ повітря і задатчиком відносної вологості і? 3 , перетворює вхідний сигнал від Кш та Еі у релейний вихідний сигнал, який керує вмиканням та вимиканням котушки магнітного пускача КМ. Замість електронного блока керування А1 ящик може комплектуватись блоком мікропроцесорного керування, виконаного на базі однокристальної ЕОМ серії К1820. Алгоритм функціонування системи керування передбачає режим, що забезпечує гарантоване досушування сіна з урахуванням зміни кліматичних умов. Наприклад, початкова гранична вологість сіна 85 %. Якщо реальна вологість повітря нижче цього значення, то сіно безперервно вентилюється протягом 40 - 50 год, потім відбувається автоматична зміна уставки на наступну, наприклад 80 %, і знову відбувається безперервне вентилювання і далі до кінцевої заданої уставки 65 %. Увесь процес досушування триває близько 200 год. Якщо раптом погодні умови стали незадовільними і реальна вологість повітря перевищує значення уставки, безперервне вентилювання припиняється. Однак, щоб запобігти самонагріванню сіна, здійснюється примусове продування протягом певного часу (вентилятор вмикається на 0,5 год через кожні 5 год). Електропривід відділення бункерів для активного вентилювання зерна ОБВ-160А має загальну встановлену потужність 280 кВт при живленні від мережі 380 В. До складу установки входять чотири бункери, в які вмонтовані вентилятори з електродвигунами потужністю 11 кВт кожний, та електронагрівники, з'єднані в 2 секції ЗО та 24 кВт у кожному бункері. Система переміщення зерна в процесі вентилювання передбачає 2 ковшових елеватори (норії), 4 гвинтових конвеєри (шнеки), системи аспірації зі шлюзовим затвором 1,1 кВт та вентилятором (4,0 кВт). Послідовність запуску електродвигунів залежить від технологічної схеми процесу, яка задається перемикачами режиму роботи. Коли на пункт надходить зерно вологістю більше ніж 16 %, його треба досушувати, що і здійснюється в бункерах активного вентилювання. Повітря, яке надходить у бункер, попередньо підігрівається електронагрівниками на 1 - 5°С. Цього достатньо, щоб зменшити відносну вологість до рівня гігроскопічної рівноваги, тобто 14 %. Зерно в бункери подається за допомогою норій, а заповнення бункера контролюється датчиками. Датчиками вологості контролюється вологість повітря на виході з бункера. Якщо вологість більше ніж 65 %, вмикається вентилятор і зерно продувається доти, поки на виході з бункера вологість повітря не стане менше ніж 65 %, що відповідає вологості зерна 14 %. Якщо погодні умови незадовільні і вологість повітря досягає 95-98 %, вмикаються електронагрівники, які підтримують необхідний рівень вологості за командами двох датчиків. Перший датчик вмикає першу секцію (ЗО кВт), коли відносна вологість повітря більше ніж 70 %, і вимикає при зменшенні вологості, другий вмикає другу секцію нагрівників (24 кВт) при вологості більше ніж 85 %, тобто електронагрівники вмикаються на повну потужність, коли відносна вологість повітря перевищує 85 %. Вологість зерна, яке вентилюється, контролюють через кожні 24 год. Вентиляційні установки, які застосовуються в овоче-фруктосховищах, за принципом дії і привідними характеристиками не мають істотних відмінностей від аналогічних установок, призначених для інших об'єктів. Змінюється лише технологічна схема та деякі вимоги, що зумовлюють введення в схему автоматизації додаткових датчиків (вологості, газового складу середовища) та окремих додаткових механізмів з електроприводом: механізмів зволоження повітря, електромагнітних клапанів, механізмів відкривання кватирок, електроприводів заслінок тощо. Так, система обладнання ОРТХ призначена для регулювання температурно-вологісного режиму в сховищах до 1000 т з активним вентилюванням продукції, яка розміщується в двох камерах. Вентиляція вмикається 4-6 разів на добу з рециркуляцією повітря по 15 - 30 хв за цикл в періоди, коли температура зовнішнього повітря нижче температури продукту, тобто ведеться охолодження продукту. У сховищах, де є штучне охолодження, вентиляція провадиться безперервно, а холодильники вмикаються тільки тоді, коли температура зовнішнього повітря перевищує температуру продукту. Оптимальна температура продукту при зберіганні дорівнює від - 1 до + З С залежно від виду продукту. У зимовий період вентиляція вмикається за програмою 4-5 разів на добу, а зниження температури продукту здійснюється шляхом змішування внутрішнього та зовнішнього повітря. Цю функцію виконує змішуючий клапан, який може займати три положення: подача зовнішнього повітря, змішування зовнішнього і внутрішнього повітря та рециркуляція. Температура повітря контролюється пропорційним терморегулятором. |