Вступ
Прилади для виміру неелектричних величин або окремі їхні перетворювачі в робочих умовах піддаються впливу різних несприятливих умов, що погіршують їхню точність. Одним з методів зменшення похибки є метод структурування схеми пристрою. За цим методом прилад будується з реальних перетворювачів, які піддані дії зовнішніх впливів, але його структурна схема вибирається така, щоб похибки окремих перетворювачів взаємно компенсувалися. Структурний метод дозволяє побудувати "гарний" прилад, використовуючи "погані" перетворювачі. Структурна схема приладу багато в чому визначає його властивості. Прилади, побудовані за простими схемами, звичайно дешевші й надійніші приладів, побудованих за складними схемами. Однак ускладнення схеми дозволяє побудувати із кращими метрологічними характеристиками: меншою похибкою, меншою інерційністю й т.д.
1
.
Послідовне з'єднання перетворювачів
Послідовною схемою з'єднання перетворювачів називається схема, де вхідною величиною кожного наступного перетворювача служить вихідна величина попереднього. Вхідною величиною першого перетворювача є вимірювана величина. Окремі перетворювачі можуть мати складнішу структуру.
Прикладом схеми з послідовним з'єднанням перетворювачів є структурна схема термоанемометра (приладу для вимірювання швидкості газів). Давач (рис. 1, а) є платиновим дротом 1 з опором R
, припаяним до манганінових стрижнів 2, які змонтовані на ручці 3. Дріт за допомогою проводів 4 включений в електричне коло, показане на рис.1, б, і нагрівається струмом I, що йде від джерела Е
. При протіканні струму I
по рамці вимірювального механізму його стрілка відхиляється. Символом  позначений сумарний опір проводів, вимірювального механізму й джерела живлення. позначений сумарний опір проводів, вимірювального механізму й джерела живлення.
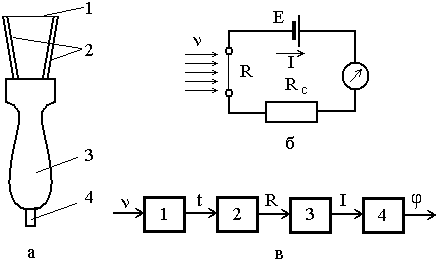
Рисунок 1 – Послідовне з'єднання перетворювачів
У розглянутому термоанемометрі можна виділити такі елементарні перетворювачі, включені послідовно (рис.1,в): 1 ‑ нагрітий дріт, що перетворить швидкість v
повітря в зміну температури t
; 2 ‑ той же дріт, що виконує функцію термометра опору й перетворить зміну температури в зміну опору R
; 3 – електричне коло, що перетворить зміну опору R
у зміну струму I
; 4 – вимірювальний механізм, що перетворить зміну струму I
у зміну відхилення стрілки або відліку приладу ц
.
Визначимо функцію перетворення приладу з послідовним з'єднанням перетворювачів. При цьому вважатимемо заданими функції перетворення окремих перетворювачів. Функція перетворення першого перетворювача є залежністю температури дроту термоанемометра t
від швидкості повітря v
і виражається складною аналітичною залежністю, яку позначимо
 . (1) . (1)
Функція перетворення другого перетворювача є залежністю опору платинового дроту R
від температури t
і виражається рівнянням
 , (2) , (2)
де R
0
‑ її опір при 0 °С;
 – температурний коефіцієнт опору. – температурний коефіцієнт опору.
Функція перетворення третього перетворювача – залежність струму I
у колі від значення опору R
:
 . (3) . (3)
Функція перетворення четвертого перетворювача – залежність відхилення стрілки магнітоелектричного механізму  від струму I
, що проходить через нього, причому від струму I
, що проходить через нього, причому
 (4) (4)
де S
M
– чутливість механізму.
Функцію перетворення приладу отримуємо шляхом послідовної підстановки функцій перетворення елементарних перетворювачів (3), (2), (1) в (4):

 . (5) . (5)
Вираз (5) визначає залежність відхилення стрілки приладу від вимірюваної швидкості повітряного потоку, а також вплив конструктивних параметрів S
M
, E
, R
c
, R
0
, б
на функцію перетворення й може використовуватися при проектуванні.
Визначимо залежність чутливості приладу від чутливостей окремих перетворювачів  . Відповідно до визначення чутливості . Відповідно до визначення чутливості
 , ,  , ,  , ,  . (6) . (6)
Перемноживши значення чутливостей, одержимо
 . (7) . (7)
Права частина рівності є чутливістю приладу
 `. (8) `. (8)
Отже, при послідовному з'єднанні перетворювачів чутливість приладу дорівнює добутку чутливостей вхідних у нього перетворювачів:
 . (9) . (9)
Розглянемо залежність похибки приладу з послідовним з'єднанням перетворювачів від похибок елементарних перетворювачів. Для простоти зазначимо, що прилад складається із трьох перетворювачів (рис. 2). Припустимо, що кожний окремо взятий перетворювач має похибку. Його вихідну величину можна подати у вигляді суми
 , (10) , (10)
де уН
— частина вихідного сигналу, обумовлена вхідною величиною й номінальною функцією перетворення;
Ду
— абсолютна похибка, наведена до виходу перетворювача.
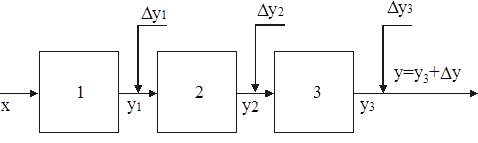
Рисунок 2 – Визначення похибки послідовного з'єднання
Якщо перетворювачі з'єднані в послідовну схему (рис. 2), то сигнал похибки Ду
впливає на вхід наступного перетворювача так само, як і сигнал уН
. Оскільки похибка Ду
звичайно мала, можна вважати, що на виході наступного перетворювача вона утворить сигнал S
Ду
, де S
– чутливість наступного перетворювача. Якщо функція перетворення цього перетворювача нелінійна, то чутливість S
залежить від сигналу уН
.
Вихідна величина перетворювача 1
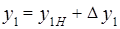 (11) (11)
впливає на вхід перетворювача 2. Вихідна величина перетворювача 2 при цьому дорівнюватиме
 (12) (12)
де S
2
– чутливість перетворювача 2;
Ду
2
– його похибка.
Вихідна величина перетворювача 2 впливає на вхід перетворювача 3. Вихідна величина перетворювача 3 при цьому стане рівною

 , (13) , (13)
де S
3
– чутливість перетворювача 3;
Ду
3
– його похибка.
За відсутності похибок вихідна величина приладу дорівнює у3
H
, отже, похибка схеми
 . (14) . (14)
З (14) видно, що при послідовному з'єднанні перетворювачів похибка приладу дорівнює сумі перелічених до виходу похибок усіх вхідних в нього перетворювачів.
Аналогічно можна показати, що похибка по входу визначається виразом
 , (15) , (15)
де Дx
1
, Дx
2
, Дx
3
– похибки перетворювачів 1–3 по входу.
Розглянемо наведену похибку приладу, що складається з перетворювачів із пропорційною функцією перетворення. Діапазон зміни вихідної величини такого приладу

 . (16) . (16)
Підставивши (14) і (16) у формулу наведеної похибки, одержимо
 . (17) . (17)
Отже, при послідовному з'єднанні перетворювачів, що мають пропорційні функції перетворення, наведена похибка приладу дорівнює сумі наведених похибок перетворювачів, його складових.
З отриманих виразів можна визначити похибку приладу, якщо відомі похибки перетворювачів, його складових, наприклад, якщо похибки систематичні.
Якщо ж похибки випадкові, то їхні значення звичайно невідомі, але часто відомі імовірнісні параметри точності: середньоквадратична похибка, граничні похибки й т.д.
Для схеми рис. 2 абсолютне значення середньоквадратичної похибки при незалежності похибококремих перетворювачів у першому наближенні можна визначити за формулою
 , (18) , (18)
де у
1,2,3
– абсолютне значення середньоквадратичної похибки відповідних перетворювачів.
Наведена середньоквадратична похибка при пропорційній функції перетворення визначається виразом
 (19) (19)
де у
пр1,2,3
‑ наведені середньоквадратичні похибки відповідних перетворювачів.
Вирази (18) і (19) справедливі лише за умов нормальних законів розподілення похибок. У іншому разі вони дають наближений результат. Для більш точного обчислення потрібно використовувати строгий метод підсумовування ймовірнісних величин.
Перевагою приладу з послідовним з'єднанням перетворювачів є його простота, недоліком ‑ досить велика похибка.
2. Диференціальні схеми з'єднання перетворювачів
Диференціальною схемою називається схема, що містить два канали з послідовним з'єднанням перетворювачів, причому вихідні величини кожного з каналів подаються на два входи від’ємного перетворювача. Від’ємний перетворювач – це перетворювач із двома входами, вихідна величина якого є непарною функцією різниці двох вхідних:
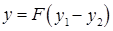 . (20) . (20)
Зокрема, вихідна величина може бути рівною
 . (21) . (21)
На рис. 3 показана структурна схема диференціального перетворювача. Відповідно до прийнятих позначень величина, що подається на сектор, позначеним знаком «–» (перетворювач 2), віднімається з величини, що підводиться до іншого сектора. Обидва канали диференціальної схеми робляться однаковими й перебувають в однакових робочих умовах.
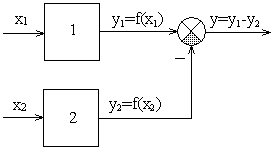
Рисунок 3. – Диференційний перетворювач
Диференціальні схеми можуть бути двох типів. У схемі першого типу вимірювана величина впливає на вхід одного каналу, на вхід іншого впливає фізична величина тієї ж природи, але вона має постійне значення, зокрема, нульове. Тоді другий канал служить для компенсації похибок, викликаних зміною умов роботи приладу. У схемі другого типу вимірювана величина після деякого перетворення впливає на обидва канали, причому так, що коли на вході одного каналу вхідна величина зростає, на вході іншого ‑ зменшується.
Розглянемо похибку перетворювача, зібраного за диференціальною схемою рис. Нехай перетворювачі 1 і 2 мають адитивні похибки, тобто такі, які не залежать від вхідної величини. У цьому випадку
 . (22) . (22)
Похибки Ду
обох каналів можна вважати рівними, оскільки канали однакові й перебувають у тих самих умовах. При цьому вихідна величина диференціального перетворювача
 . (23) . (23)
Отже, у диференціальних перетворювачах адитивні похибки каналів 1 і 2 компенсуються.
Лінійність функції перетворення диференціальної схеми другого типу при малих х
краще, ніж лінійність вихідних перетворювачів. Нехай канали 1 і 2 мають нелінійні функції перетворення
 . (24) . (24)
Розкладаючи у
1
й у
2
у степеневий ряд в околі х
0
, одержимо
 ; ;
 . (25) . (25)
При підсумовуванні у
1
й у
2
будуть скомпенсовані адитивні похибки, та похибки і нелінійність, що виникають завдяки другій похідній функції перетворення.
3. Логометричні схеми з'єднання перетворювачів
Логометрична схема включення перетворювачів (рис. 4) містить два канали з послідовним з'єднанням перетворювачів, вихідні величини яких подаються на логометричний перетворювач. Логометричний перетворювач – це перетворювач із двома входами, вихідна величина якого є функцією відношення від вхідних величин:
 . (26) . (26)
Обидва канали логометричної схеми, як і в диференціальній схемі, виконуються однаково й перебувають у тих самих умовах.
Логометрична схема дозволяє компенсувати мультиплікативну похибку.
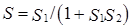
У загальному випадку для схеми, наведеної на рис. 4, при пропорційній функції перетворення каналів 1 і 2
 . (27) . (27)
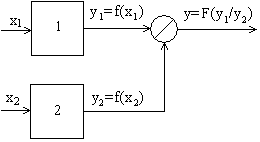
Рисунок 4 – Логометр
Вихідна величина приладу з логометричною схемою включення дорівнює
 , (28) , (28)
тому вона не залежить від зміни чутливості каналів послідовного перетворення.
4. Компенсаційні схеми включення перетворювачів
Прилади, побудовані за компенсаційною схемою (схеми зі зворотним зв'язком), мають малу як адитивну, так і мультиплікативну похибки. Застосування зворотного зв'язку дозволяє створити прилади, що мають малу статичну й динамічну похибку. Ці прилади мають більшу вихідну потужність, і їхні показання мало залежать від навантаження.
Структурна схема компенсаційного перетворювача наведена на рис. 5. Вхідна величина х
подається на один із входів перетворювача, що віднімає, на інший його вхід подається х
ос
сигнал тієї ж фізичної природи, що й вхідна величина х
, причому розмір х
ос
величини визначається розміром вихідної величини у
. Різниця Дх=х-х
ос
надходить у перетворювач 1. Якщо перетворювачі 1 і 2 мають лінійні функції перетворення
 , ,  , (29) , (29)
де S
1
й S
2
‑ чутливості відповідних перетворювачів, то залежність між вхідною величиною х і сигналом х
ос
визначається співвідношенням
 (30) (30)
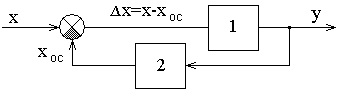
Рисунок 5 – Компенсаційна схема, або схема зі зворотним зв’язком
З (30) слідує, що
 .(31) .(31)
Добуток S
1
S
2
часто досить великий, і можна вважати, що x
≈ х
ос
. Рівність x
≈ х
ос
часто має місце й при нелінійних функціях перетворення. З іншого боку, х
ос
є функцією вихідної величини
 . (32) . (32)
Із цього співвідношення можна визначити
 (33) (33)
де f
–
1
– позначення функції, зворотної до (48).
Отже, якщоx
≈ х
ос
, то y
визначається перетворювачем 2 (рис. 5) і мало залежить від перетворювача 1. У приладах зі зворотним зв'язком роль перетворювача зворотного зв'язку виконують прості пристрої, що мають високу точність. При цьому високу точність має й прилад у цілому.
Розглянемо функцію перетворення й чутливість перетворювача зі зворотним зв'язком. Для простоти визначимо, що перетворювачі 1 і 2 на схемі рис. 5 мають пропорційні функції перетворення (32).
Маючи на увазі рівності (33) і
 , (34) , (34)
одержуємо
 . (35) . (35)
Звідси чутливість схеми зі зворотним зв'язком
 (36) (36)
Визначимо похибку пристрою, обумовлену мультиплікативними похибками вхідних у нього перетворювачів 1 і 2, тобто похибку, викликану мінливістю чутливостей цих перетворювачів.
Згідно з (36) чутливість схеми є функцією двох змінних
 . (37) . (37)
Зміну  можна визначити як повний диференціал виразу (38): можна визначити як повний диференціал виразу (38):
 . (38) . (38)
Вхідні частки похідні в (54) виходять шляхом диференціювання (39):
 ; ;
 . (39) . (39)
Відносна мультиплікативна похибка  дорівнює відносній зміні чутливості дорівнює відносній зміні чутливості  . З огляду на це одержимо . З огляду на це одержимо
 , (40) , (40)
де  ‑ відповідно відносні мультиплікативні похибки перетворювачів 1 і 2 (рис. 5). ‑ відповідно відносні мультиплікативні похибки перетворювачів 1 і 2 (рис. 5).
Можна показати, що відносна адитивна похибка компенсаційної схеми визначається таким же виразом (40) з тією ж різницею, що і  і і  . .
За виразом (40) обчислюється похибка схеми, якщо відомі похибки перетворювачів 1 і 2. Якщо ж ці похибки є випадковими й відомі їх середньоквадратичні похибки  й й  то середньоквадратична похибка компенсаційного перетворювача то середньоквадратична похибка компенсаційного перетворювача
 . (41) . (41)
З отриманих співвідношень видно, що вплив похибки перетворювача 1 на похибку приладу з компенсаційною схемою сильно зменшується.
Зменшення залежності похибки приладу зі зворотним зв'язком від похибки перетворювача 1 можна показати в такий спосіб. Допустимо, що в схемі складного перетворювача зі зворотним зв'язком (рис. 5) перетворювач 1 не стабілізований і його чутливість  може залежати, зокрема, від опору, на який навантажений цей складний перетворювач. При зменшенні чутливості зменшуються вихідна величина може залежати, зокрема, від опору, на який навантажений цей складний перетворювач. При зменшенні чутливості зменшуються вихідна величина  й сигнал зворотного зв'язку й сигнал зворотного зв'язку  .
Це викликає збільшення .
Це викликає збільшення  й збільшує значення . Отже, завдяки зворотному зв'язку зменшується похибка, викликана зміною . й збільшує значення . Отже, завдяки зворотному зв'язку зменшується похибка, викликана зміною .
5
.
Динамічні характеристики давачів
Динамічні характеристики визначають перехідний процес встановлення вихідного сигналу при зміні вхідного. Інформаційна здатність вимірювальних перетворювачів крім статичних характеристик, що подають функцію перетворення сигналу, визначається й динамічними характеристиками, які визначають швидкість виконання одного перетворення, що визначає й обсяг одержуваної інформації.
Для аналізу часових характеристик передатну функцію, звичайно, зображують у вигляді лінійної функції. Таке наближення припустиме, оскільки до лінійної функції прагнуть привести функції реальних перетворювачів. А необхідність такого наближення обумовлена тим, що аналіз часових характеристик нелінійних елементів надзвичайно складний.
Часто використовують не тільки часове, але й спектральне подання сигналу. Для періодичного сигналу маємо
 , (42) , (42)
де спектральні коефіцієнти мають вигляд  : :
 , ,  . .
У загальному випадку часовий зв'язок між вхідною величиною  й вихідною й вихідною  можна визначити диференціальним рівнянням: можна визначити диференціальним рівнянням:

 . (43) . (43)
При аналізі складних вимірювальних систем їх намагаються привести до набору простих ланок. Однією із простих ланок у цьому випадку є інтегруюча схема (рис.6). Її робота описується рівнянням
 . (44) . (44)
Роботу інтегруючих перетворювачів зручніше за все розглянути на прикладі електричних перетворювачів, відомих з теорії електричних кіл.
Інтегруючий ланцюжок має вигляд:

Рисунок 6 – Інтегруюча схема
Вихідна напруга визначається виразом:
 . (45) . (45)
Ця схема буде інтегруючою щодо вхідного сигналу, якщо  . Доведемо це. Перепишемо рівняння електричного кола у вигляді . Доведемо це. Перепишемо рівняння електричного кола у вигляді
 . (46) . (46)
Подаючи вихідну напругу у вигляді добутку , одержимо , одержимо
 . (47) . (47)
Далі проведемо послідовність перетворень, щоб визначити допоміжні функції х
і у
.
 , (48) , (48)
 , (49) , (49)
 , (50) , (50)
 . (51) . (51)
Цей вираз дозволить виразити вихідний сигнал при будь-якій формі вхідного
 . (52) . (52)
Зобразимо епюри вихідного сигналу для одно- й двоступеневого перетворювача (рис. 7).
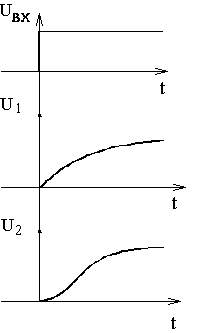
Рисунок 7 – Епюри напруги для функції підключення
У спектральному поданні робота інтегруючої схеми показана на рис. 8.
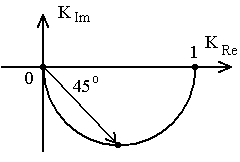
Рисунок 8 – Фазовий портрет інтегруючої схеми
У такий же спосіб можна розглянути роботу схеми, що диференціює. Основне рівняння має вигляд:
 . (53) . (53)
Інші параметри пропонується вивести самостійно.
До простих схем можна віднести й схему із затримкою сигналу, описану рівнянням
 . (54) . (54)
У цій схемі сигнал на виході повторює сигнал на вході, але із затримкою, рівною  . .
Будь-який давач або вимірювальний прилад є з'єднанням окремих вимірювальних перетворювачів. Переважно це послідовне з'єднання. При послідовному з'єднанні загальний коефіцієнт передачі визначається добутком коефіцієнтів передачі окремих перетворювачів. Він визначає і частотні характеристики давача.
Тоді нормована частотна характеристика послідовного з'єднання двох інтегруючих перетворювачів має вигляд:
 . (55) . (55)
Фазовий портрет цієї характеристики має вигляд петлі, розташованої в негативній на півплощині уявних значень, що перетинає вісь дійсних значень у точці послідовний диференціальний логометричний перетворювач схема
 (56) (56)
при
 . (57) . (57)
На високих частотах запізнювання вихідного сигналу становить півперіод, а точка  наближається до нуля з боку негативних значень дійсної осі. наближається до нуля з боку негативних значень дійсної осі.
Для перехідної характеристики в початковий момент справедливо параболічне наближення:
 . (58) . (58)
Частотна характеристика триланкового давача має вигляд:
 . (59) . (59)
Дійсну вісь перетинає в точці
 (60) (60)
при
 . (61) . (61)
Для перетворювача, що диференціює, і що в електричних колах моделюється за допомогою  -ланцюжка, нормоване рівняння -ланцюжка має вигляд: -ланцюжка, нормоване рівняння -ланцюжка має вигляд:
 . (62) . (62)
Як видно із цього рівняння,  -ланцюжок може лише апроксимувати ідеальний перетворювач, що диференціює, тільки в області, у якій швидкість зміни сигналу істотно менше 1/Т
. -ланцюжок може лише апроксимувати ідеальний перетворювач, що диференціює, тільки в області, у якій швидкість зміни сигналу істотно менше 1/Т
.
Рішення цього рівняння в частотному поданні має вигляд:
 . (63) . (63)
Нормований фазовий портрет передатної функції є півколом, розташованим над віссю дійсних значень, радіус якого дорівнює 0,5, а центр розташований у точці  , ,  . Зі зменшенням частоти модуль передатної функції прагне до нуля, а фаза випереджає фазу вхідного сигналу на чверть періоду. . Зі зменшенням частоти модуль передатної функції прагне до нуля, а фаза випереджає фазу вхідного сигналу на чверть періоду.
У часовому поданні при подачі на вхід кінцевого стрибка вхідної дії передатня функція має вигляд:
 , (64) , (64)
де  – початкове значення вихідного сигналу рівне – початкове значення вихідного сигналу рівне  ; ;
 – стрибок вхідного впливу. – стрибок вхідного впливу.
Характеристики послідовних з'єднань диференціальних ланцюжків є дзеркальним відбиттям характеристик інтегруючих ланцюжків.
Далі розглянемо причини виникнення нестійкості давачів з негативними зворотними зв'язками й методи їхнього усунення.
Негативні зворотні зв'язки часто застосовуються при конструюванні давачів і вимірювальних приладів для лінеаризації передатних характеристик. У цьому випадку лінійність приладу визначається в основному лінійністю елемента порівняння, що, як правило, працює в області малих сигналів. Але, при конструюванні пристроїв зі зворотними зв'язками необхідно враховувати можливість їхнього самозбудження.
Самозбудження пристроїв відбувається у випадку, якщо коефіцієнт передачі по петлі зворотного зв'язку перевищує одиницю. У цьому випадку малий сигнал, що виникає спочатку у вигляді шумів, властивих кожному елементу, пройшовши по петлі, одержує посилення й повертається в початкову точку з більшою величиною. Друге й наступне обернення сигналу по колу збільшують сигнал. Лавиноподібний процес збільшення сили сигналу триває до настання обмеження. Але цей зв'язок є позитивним. Вимірювальні прилади проектують із негативним зворотним зв'язком. Але, як показано вище (51), реальні перетворювачі в діапазоні частот міняють фазу переданого сигналу. Тому проектуючи негативний зворотний зв'язок у заданому частотному діапазоні, можна одержати позитивний зв’язок поза цим діапазоном.
|