ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ
РЯЗАНСКИЙ ГОСУДАРСТВЕННЫЙ РАДИОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА РАДИОТЕХНИЧЕСКИХ СИСТЕМ
УТВЕРЖДАЮ
Зав. кафедрой радио-
технических систем
____________ В.И.Кошелев
"___"__________ 2007 г.
|
|
ПОЯСНИТЕЛЬНАЯ ЗАПИСКА
к курсовой работе по дисциплине:
«Теоретические основы радиоэлектронной борьбы»
на тему:
«СРЕДСТВА ПОСТАНОВКИ ПОМЕХ И ПОМЕХОЗАЩИТЫ»
Рязань 2007 г.
ФЕДЕРАЛЬНОЕ АГЕНТСТВО ПО ОБРАЗОВАНИЮ РОССИЙСКОЙ ФЕДЕРАЦИИ
РЯЗАНСКИЙ ГОСУДАРСТВЕННЫЙ РАДИОТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ
КАФЕДРА РАДИОТЕХНИЧЕСКИХ СИСТЕМ
ЗАДАНИЕ НА КУРСОВУЮ РАБОТУ
по дисциплине «Теоретические основы радиоэлектронной борьбы»
Студент Егоров Сергей Валерьевич
код ________ группа 311
1. Тема: «СРЕДСТВА ПОСТАНОВКИ ПОМЕХ И ПОМЕХОЗАЩИТЫ РЛС»
2. Срок представления курсовой работы к защите « 10 » мая 2007 г.
3. Исходные данные для проектирования:
а). Исходные данные к курсовой работе:
Тип РЛС: дальнего обнаружения;
Параметры РЛС: дальность обнаружения цели не менее R
=
200+10*7=270км (7 –номер по журналу);
определяемые координаты цели: азимут, дальность, угол места
Параметры цели: ЭПР цели Е
=(7 ‑ 7/5)= 5.6 м2
, максимальная скорость цели V
=
(1000-10*7)= 930 м/с;
Виды применяемых помех: помеха от земной поверхности, уводящая по дальности;
б). Требования к проекту
Разработать алгоритмы, структурные схемы постановщика помех и средств помехозащиты радиолокационной станции, провести анализ эффективности применения средств помехопостановки и помехозащиты.
4. Обязательные разделы пояснительной записки курсовой работы
4.1. Титульный лист.
4.2. Задание на курсовую работу.
4.3. Содержание.
4.4. Введение.
4.5. Анализ задачи и ее формализация.
4.6. Расчет параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех).
4.7. Расчет зон прикрытия помехами (пассивными и активными).
4.8. Расчет параметров средств помехозащиты (алгоритма помехозащиты структуры и параметров).
4.9. Анализ эффективности применения комплекса помех и средств помехозащиты.
4.10. Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон.
4.11. Выбор и технико-экономическое обоснование технологической базы для реализации проекта.
4.12. Составление структурной схемы устройства и описание ее работы
4.13. Заключение
4.14. Список использованных источников
4.15. Графические материалы (1 л.)
Руководитель работы В.И. Кошелев
Задание принял к исполнению
студент ______________________
подпись
Содержание
.
1. Введение
2. Анализ задачи и её формализация
3. Расчет параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех)
4. Расчет зон прикрытия помехами (пассивными и активными)
5. Расчет параметров средств помехозащиты (алгоритма помехозащиты, структуры и параметров)
6. Анализ эффективности применения комплекса помех и средств помехозащиты
7. Оценка требований к аппаратно-программным ресурсам средств конфликтующих сторон
8. Выбор и технико-экономическое обоснование технологической базы для реализации проекта
9. Составление структурной схемы устройства и описание её работы
10. Заключение
11. Список использованных источников
12. Графические материалы(1 л.)
1.Введение
радиоэлектронный конфликт помехозащита
В современном вооруженном конфликте уже невозможно обойтись без различных радиоэлектронных средств. Более того, к РЭС предъявляются всё более высокие технические требования, для обеспечения заданных ТТХ. Порой эти требования входят друг с другом в противоречия. Поэтому разработка РЭС является очень сложной и интересной задачей, которая по силам, только ведущим странам. Исследования по этим направлениям проводятся в ведущих КБ.
В связи с этим, данная курсовая является очень актуальной в современных условиях, и даёт возможность с инженерной точки зрения проанализировать обе стороны радиоэлектронного конфликта, выяснить достоинства и недостатки тех или иных методов радиоэлектронного подавления и защиты РЭС.
2.
Анализ задачи и её формализация
В данной курсовой работе предлагается произвести эскизный расчёт РЛС, в соответствии с параметрами этой радиолокационной станции разработать алгоритмы работы и структурные схемы постановщика помех и устройств защиты для этой РЛС.
В соответствии с ТЗ, дальнейшие рассуждения проводятся для трехкоординатной РЛС дальнего обнаружения. Дальность обнаружения цели выбирается не менее 270 км (Rmax
= 300 км). ЭПР цели (E= 5.6 м2
) типично для тяжёлого истребителя-бомбардировщика (например: F-111, Су-27). Предлагаемый ТЗ тип помех: помеха от земной поверхности, и уводящая по дальности.
Первый тип помех относится к естественным помехам и возникает из-за наличия у антенной системы РЛС боковых лепестков в угломестной плоскости. Главный луч при этом непосредственно земли не касается, так как для РЛС дальнего обнаружения характерна слегка приподнятая ДН. Также к данному виду помехи относятся так называемые «местные предметы», которые возникают из-за больших углов закрытия на местности вокруг точки стояния РЛС, при этом помеха приходит и по главному лучу. Для данной помехи характерно нулевое доплеровское смещение частоты, следовательно, для борьбы с ней лучше всего использовать режекторный фильтр.
Второй тип помех относится к преднамеренным. Данная помеха предназначена для нарушения работы системы автоматического сопровождения по дальности (АСД). При наличии такого рода помех происходит срыв селекции цели, срыв сопровождения, как минимум автоматического, а как максимум система АСД берёт на сопровождение ложные цели. Генерируемая уводящая помеха должна быть точной копией полезного сигнала, для чего в аппаратуре постановщика помех необходимо предусмотреть разведывательный приёмник, который передавал бы информацию о сигнале в режиме реального времени. При проектировании также надо учесть, что постановщик работает по боковым лепесткам ДН. Борьба с такого рода помехой возможна на этапе вторичной обработки РЛИ, из сопоставления данных канала доплеровского измерителя скорости и канала вычисления скорости на основе траекторной обработки. Однако, как правило, в РЛС дальнего обнаружения однозначного измерения по скорости достичь не удаётся, следовательно, в данном случае канал ДИС отсутствует. Исходя из этого, алгоритм помехозащиты существенно упростится и, будет представлять собой процесс сравнения данных канала вычисления скорости на основе траекторной обработки с порогом скорости, заданным в ТЗ (Vmax
=930 м/с).
Эскизный расчёт РЛС.
Для РЛС дальнего обнаружения характерен импульсный режим работы. Рассчитаем период повторения зондирующих импульсов исходя из заданной однозначно измеряемой дальности Rmax
= 300 км:

Для данного вида радиолокационных станций характерен метровый диапазон рабочих частот от 1 до 10 метров. В соответствии с атмосферными окнами прозрачности и допустимыми размерами раскрыва антенной системы приемлема несущая частота  . Реализуемая ширина ДН в азимутальной плоскости на этих частотах составляет от 2.5 до 4 градусов. Достаточная ширина ДН . Реализуемая ширина ДН в азимутальной плоскости на этих частотах составляет от 2.5 до 4 градусов. Достаточная ширина ДН  . Рассчитаем раскрыв антенны необходимый для формирования заданной ширины ДН: . Рассчитаем раскрыв антенны необходимый для формирования заданной ширины ДН:
 , ,
где  - коэффициент, учитывающий величину амплитудных искажений. - коэффициент, учитывающий величину амплитудных искажений.
Для определения радиолокационной станцией угла места необходимо обеспечить качание луча в угломестной плоскости (последовательный режим обзора). Зададимся такой же шириной ДН что и в азимутальной плоскости, соответственно таким же будет и эквивалентный раскрыв антенны в этой плоскости. Конструктивно антенную систему можно выполнить в виде двух ФАР, одна из которых, синфазная, будет обеспечивать узкую ДН в азимутальной плоскости, а другая, наклонного излучения, качание луча в угломестной плоскости. Вся же АС будет вращаться в азимутальной плоскости, обеспечивая последовательный обзор в секторе от 0 до 360 градусов. Скорость вращения антенны выберем стандартной для данного типа РЛС: 
Рассчитаем коэффициент усиления АС:

Круговая частота вращения антенны:

Ширина ДН в радианах:

Рассчитаем длительность пачки отражённого от цели сигнала, т.е. время, в течение которого цель находиться в главном луче ДН АС:

Количество импульсов в пачке:

Зададимся разрешением по дальности  и рассчитаем длительность импульса зондирующего сигнала: и рассчитаем длительность импульса зондирующего сигнала:

Эффективная ширина спектра сигнала:

Рассчитаем пороговое отношение сигнал/шум:

Рассчитаем мощность шума:
 , ,
где  - постоянная Больцмана, Кш
-коэффициент шума приёмного устройства. Минимальная мощность сигнала необходимая для его обнаружения: - постоянная Больцмана, Кш
-коэффициент шума приёмного устройства. Минимальная мощность сигнала необходимая для его обнаружения:
 . .

Рассчитаем среднюю мощность РЛС, исходя из обеспечения необходимой энергетической дальности, применив основное уравнение радиолокации (Рис.1):

Импульсная мощность РЛС:
 , где Q-скважность зондирующего сигнала: , где Q-скважность зондирующего сигнала:
Полученные энергетические характеристики излучения соответствуют реально допустимым и реализуемым на практике.
3. Расчёт параметров помехопостановщика (мощность передатчика помех, средств создания помех, параметров помех)
Основываясь на полученных выше основных характеристиках РЛС, можно перейти к расчету параметров помехопостановщика.
Характерной особенностью уводящей помехи является то, что она должна представлять собою точную копию сигнала. Именно это является залогом того, что система обработки РЛС примет сигнал помехи за сигнал отражённый от реальной цели. Это предполагает совпадение длительностей импульса помехи и сигнала  и периодов повторения Тп
. и периодов повторения Тп
.
Расчёт средней мощности излучения постановщика выполняется из условия согласования по мощности сигналов помехи и реального сигнала на входе приёмного устройства. Мощность сигнала помехи на входе РПрУ должна находиться в пределах 2·Pmin
..4·Pmin
для имитации ложной цели, находящейся на максимальной дальности. Возьмём расстояние от РЛС до постановщика помех RПАП
=500 км. Учитывая свойства антенн метровых волн, большой коэффициент усиления антенны постановщика достигнуть нельзя, зададимся значением GПАП
=5, оно примерно соответствует решётке продольного излучения состоящей из трёх полуволновых вибраторов, что вполне реализуемо в бортовом варианте. Надо также учесть, что постановщик работает по боковым лепесткам ДН АС РЛС. Типичный средний уровень боковых лепестков  , или в разах: , или в разах:
Используя основное уравнение радиолокации, получаем:

Т.е. для имитации цели на мнимом расстоянии в 300 км, и при нахождении постановщика помех на 500 км от РЛС, передатчик постановщика помех должен создавать среднюю мощность в 5.5 мВт, для обеспечения согласованности энергетики помехи.

При имитации целей находящихся на расстоянии менее 300 км надо увеличивать мощность помехи пропорционально увеличению мощности сигнала на входе РЛС Pmin
. Далее приведена зависимость мощности на входе Pmin
от дальности до цели:

Та же зависимость, но уже в окрестностях 30 км, имеет вид:

Как видно из этих графиков минимальная мощность на входе РЛС, требуемая для обнаружения цели обратно пропорциональна корню четвёртой степени расстояния до цели. Соответственно, мощность передатчика уводящей помехи необходимо менять в зависимости от требуемой имитируемой дальности ложной цели.
4. Расчёт зон прикрытия помехами (пассивными и активными)
Как уже отмечалось ранее, передатчик помех несёт на себе воздушное судно, это может быть самолёт ДРЛО(E-3 «AWACS», A-50 «Шмель»), самолёт радиоэлектронной разведки(RC-135), также контейнер с оборудованием постановщика может вешаться под крылья более легкого бомбардировщика или истребителя. Размер аппаратуры, а соответственно и конкретное место размещения будет зависеть от требуемой мощности, а значит от расстояния между РЛС и постановщиком, а также от минимального, необходимого расстояния между РЛС и ложной целью. Как правило, на тяжёлые самолеты могут ставиться гораздо более мощные передатчики, это позволяет работать им с больших дистанций, оставаясь в глубоком тылу атакующих порядков истребительной и бомбардировочной авиации, лёгкие же действуют непосредственно «на острие».
На рис.3 показана зависимость требуемой мощности передатчика помех от расстояния до РЛС, при имитации цели находящейся на максимальной дальности(Rmax
=300 км). Здесь хорошо видно, что если РПАП
попадает в заштрихованную область, то сигнал на входе РЛС попадает в интервал 2·Pmin
..4·Pmin
, а значит, помеха обладает энергетическими свойствами сигнала реальной цели находящейся на соответствующей дальности.
На рис.4 изображена аналогичная зависимость, но уже для имитируемой дальности цели в 30 км.
Данные зависимости в целом характеризуют зоны прикрытия уводящими помехами. Допустим, если RПАП
=750 км, то для прикрытия зоны видимости РЛС от 30 до 300 км, мощность передатчика помех надо менять в диапазоне приблизительно от 100 Вт до 10 мВт.
Необходимо отметить, что уводящая помеха должна обладать всеми динамическими свойствами реальной цели - она должна двигаться, для чего необходима жёсткая синхронизация изменения энергетических и временных параметров помехи.


Расчет зоны действия помехи от земной поверхности является очень сложной электродинамической задачей, в которой надо, прежде всего, учитывать форму ДН АС и конкретно положение боковых лепестков. В данной работе не стоит задача столь подробного исследования, поэтому можно ограничиться лишь приблизительными выкладками. Зададимся КНД АС в направлении боковых лепестков GПП
=G·K= 60.82; ЭПР помехи ориентировочно 20000 м2
. По основному уравнению радиолокации получаем, что мощность помехи от земной поверхности на входе РПрУ РЛС будет равна:

Это значение используется для расчета отношений ш/п и с/п+ш, с целью ввода этих данных в программу «Стрела 2.0».
5. Расчёт параметров средств помехозащиты (алгоритма помехозащиты, структуры и параметров).
Отношение ш/п на входе РЛС:

Подавление в режекторном фильтре должно осуществляться до уровня шума, следовательно, коэффициент подавления должен составлять около 49 дБ.
Отношение с/п+ш:

Для расчёта параметров режекторного фильтра воспользуемся пакетом «Стрела 2.0»:

Относительная фаза помехи равна нулю, так как земная поверхность неподвижна. Относительная ширина спектра флуктуаций помехи выбирается из интервала 0.02..0.25, зададимся величиной 0.1. Значения ш/п и с/п+ш установим ранее рассчитанные.
Коэффициент подавления оказывается при этом равным 48.71 дБ, что приемлемо, учитывая дальнейшее накопление.
Коэффициенты цифрового режекторного фильтра:
| 0 |
1 |
2 |
3 |
4 |
5 |
6 |
| ai
|
1 |
-6 |
15 |
-20 |
15 |
-6 |
1 |
Симметричность коэффициента относительно центрального гарантирует линейность фазово-частотной характеристики фильтра.

Упрощённая структурная схема цифрового режекторного фильтра имеет вид (Рис.5):
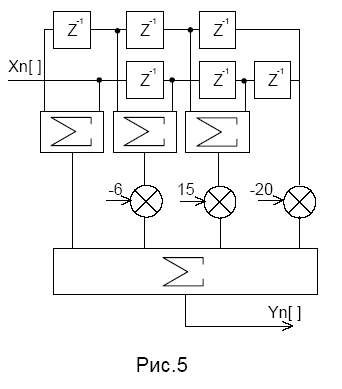
Здесь применена схема, подвергшаяся упрощению вынесением за скобки одинаковых сомножителей, благодаря симметричности коэффициентов фильтра. Всё это позволяет сократить число умножителей, что упрощает аппаратную реализацию устройства.
Для работы фильтра необходимо чтобы на его входе присутствовало не менее Кф отсчетов, где Кф - порядок режекторного фильтра. Посредством остальных 42-7=35 отсчетов можно произвести когерентное накопление.
Борьба с уводящей по дальности помехой может быть реализована на этапе вторичной обработки радиолокационной информации. Как уже отмечалось ранее, рассчитанная РЛС дальнего обнаружения не обладает однозначным измерением по скорости. Алгоритм помехозащиты, в общем виде, можно представить в виде упрощенной структурной схемы, изображённой на рис.6.
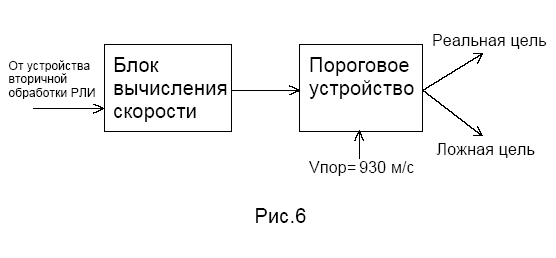
Данный алгоритм реализуется программно в устройстве ВОИ и позволяет достаточно эффективно подавлять уводящую помеху. Принцип действия основан на сравнении пороговым устройством, скорости вычисленной по результатам траекторной обработки с пороговым значением Vпор
, характерным для реально существующих самолётов (около 3 Мах). Скорость вычисляется по формуле:
 , ,
где  - разность расстояний между положением цели за два разных периода обзора, пройденная целью за - разность расстояний между положением цели за два разных периода обзора, пройденная целью за  . .
6. Анализ эффективности применения комплекса помех и средств помехозащиты
Мерой эффективности режекторного фильтра служит достигнутый, коэффициент подавления. В нашем случае он равен 48.71 дБ, т.е. сигнал помехи от земной поверхности фильтр подавляет до уровня шумов. Таким образом, помеха практически полностью исключается из дальнейшей обработки. Однако надо заметить, что в месте с помехой будет режектирован также сигнал от малоскоростных целей и целей имеющих только тангенциальную составляющую скорости, летящих перпендикулярно направлению излучения РЛС.
Также критерием эффективности служит коэффициент улучшения отношения с/п, в спроектированном фильтре он составляет 31.04 дБ, что означает превышение отношения с/п на выходе над с/п на входе более чем в тысячу раз.
Эффективность постановки уводящей помехой, определяется снижением вероятности правильного обнаружения. Допустим, в нормальном режиме РЛС может обнаруживать 100 целей, если постановщик ставит еще 50 ложных целей, то вероятность правильного обнаружения снижается в 1.5 раза.
7. Оценка требований к программно-аппаратным ресурсам средств конфликтующих сторон.
Обработка РЛИ в рассматриваемой РЛС, как и обработка развединформации в устройстве постановки помех, должна осуществляться в режиме реального времени, это предполагает предъявление соответствующих требований к быстродействию устройств осуществляющих эту обработку.
Цифровые режекторные гребенчатые фильтры (ЦРГФ) подавления помех требуют предварительного преобразования сигналов в цифровую форму с помощью АЦП. В таких устройствах производиться дискретизация по времени, с дискретом  . Быстродействие АЦП определяется затратами на преобразование, которые должны быть меньше длительности временного дискрета . Быстродействие АЦП определяется затратами на преобразование, которые должны быть меньше длительности временного дискрета  , где m- число разрядов АЦП. Если быстродействия АЦП не хватает, то переходят к ЦРГФ в виде комплексных фильтров с двумя квадратурными каналами, в которых включены два АЦП. , где m- число разрядов АЦП. Если быстродействия АЦП не хватает, то переходят к ЦРГФ в виде комплексных фильтров с двумя квадратурными каналами, в которых включены два АЦП.
Аналогичные требования предъявляются и к быстродействию АЦП РПрУ устройства постановки помех.
Требования к устройствам ВОИ менее жесткие, так как, например, индикатор кругового обзора (ИКО) должен обновлять информацию через время обзора.
8. Выбор и технико-экономическое обоснование технологической базы для реализации проекта
Техническая реализация фильтровых устройств возможна на фильтрах с быстрым преобразованием Фурье (БПФ), а также на микропроцессорах DSP. Всё большую роль в цифровой обработке РЛИ начинают играть программируемые логические интегральные микросхемы (ПЛИС), которые обладают гибкой структурой и возможностью смены программы, в отличие, например от микропроцессоров.
Несколько слов об АЦП. В настоящее время быстродействие использующихся образцов характеризуется частотой дискретизации  , например, АЦП AD 6644 фирмы AnalogDevice (США) имеет , например, АЦП AD 6644 фирмы AnalogDevice (США) имеет  , при 14 разрядах кода, динамическом диапазоне 73 дБ и частоте входного сигнала до 39 МГц. , при 14 разрядах кода, динамическом диапазоне 73 дБ и частоте входного сигнала до 39 МГц.
Типовая реализация устройства обнаружителя движущихся целей (ОДЦ) многоканально по дальности (m = 2000 каналов), рис.7. После подавления помех используется оптимальная, междупериодная обработка сигнала на фоне белого шума. Обычно применяют когерентное накопление остатков вычитания. При этом вводится поправка в фазу сигнала для компенсации движения цели.
Каналы дальности реализуются либо с помощью селекторов дальности в УПЧ, либо с помощью коммутации ячеек ОЗУ.
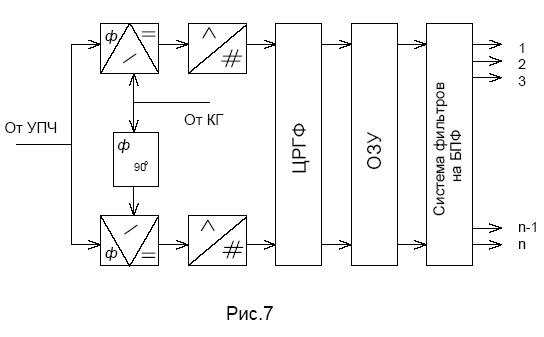
Селекторы дальности (СД) обеспечивают поступление в каждый из m каналов сигналов только с одного элемента разрешения по дальности. С подавлением помех в ЦРГФ информация записывается в ОЗУ, а затем фильтруется на основе n-точечного алгоритма БПФ, пусть даже с неоднозначностью по скорости. Причем n = N-Kф = 42-7 = 35, где N- количество импульсов в пачке, а Кф - порядок режекторного фильтра.
9. Составление структурной схемы устройства и описание её работы
Упрощённая структурная схема устройства постановки уводящих помех изображена на рис.8. В разведывательном радиоприёмном устройстве (РПрУ) производиться измерение параметров подавляемой РЛС. Генератор (Г), генерирует колебания несущей частотой равной несущей РЛС.

Детектор выделяет огибающую сигнала РЛС. После детектора сигнал подаётся на управляемые линии задержки. Блок управления задержками (БУЗ) предназначен для согласования временных параметров постановки помех на различных дальностях.
Огибающие, задержанные на соответствующее время, подаются на модуляторы, в которых обеспечивается уже согласование по энергетическим параметрам генерируемой помехи.
В дальнейшем, промодулированный соответствующим образом сигнал, поступает на сумматор, осуществляющий объединение мощностей и излучается в пространство.
На практике, осуществляться преобразование огибающей сигнала в цифровую форму, и запоминание в ОЗУ, что позволяет генерировать сигнал помехи в любой момент времени, не измеряя вновь параметров РЛС.
10. Заключение
В ходе выполнения курсовой работы были получены ценные навыки расчета параметров РЭС разных сторон РЭ конфликта, а также навыки анализа эффективности подавления и помехозащиты. Был произведен эскизный расчёт РЛС и параметров помехозащиты. Определена структура средств помехопостановки и помехозащиты.
Таким образом, курсовая работа достигла всех поставленных целей и задач.
Список использованных источников
1. Бакулев П.А. Радиолокационные системы. - М.,: Радиотехника, 2004 г.
2. Радзиевский В.Г. Сирота А.А. Теоретические основы радиоэлектронной разведки. - М.,: Радиотехника, 2004 г.
3. Гоноровский И.С. Радиотехнические цепи и сигналы. – М.: Радио и связь, 1986 г.
4. Кузьмин С.З. Цифровая обработка РЛИ. – М.: Советское радио, 1967 г.
5. Воскресенский Д.И. Антенны и устройства СВЧ. – М.: Радио и связь, 1981 г.
Графические материалы
Структурная схема РЛС дальнего обнаружения (Во избежание излишней детализации, устройства дальнейшей обработки, не рассматривавшиеся в данной курсовой работе, не показаны, в виду их очевидности).

|