Контрольная работа: Автоматизация типовых технологических процессов и установок
|
Название: Автоматизация типовых технологических процессов и установок Раздел: Промышленность, производство Тип: контрольная работа |
| Министерство образования и науки Российской Федерации Федеральное государственное автономное образовательное учреждение высшего профессионального образования Российский государственный профессионально – педагогический университет Кафедра электрооборудования и автоматизации промышленных предприятий
Контрольная работа По дисциплине: "Управление типовыми технологическими процессами"
Екатеринбург 2010 Типовая структура следящего электропривода и ее реализация на ЭВМ электропривод преобразователь датчик грузовой подъемник Следящий электропривод, следящая система, обеспечивающая воспроизведение некоторых механических перемещений на управляемом объекте посредством исполнительного электродвигателя (ИЭ). С. э. включает в себя задающее устройство, измерительный преобразователь, орган сравнения, усилитель и исполнительный электродвигатель. Задающее устройство вырабатывает исходный сигнал (изменяющийся, как правило, по произвольному закону). Измерительный преобразователь непрерывно измеряет фактическое значение воспроизводимой величины на управляемом объекте, которое при помощи органа сравнения сопоставляется с заданным. Обычно измерительный преобразователь и орган сравнения объединены в одном устройстве, вырабатывающем электрический сигнал рассогласования (СР), пропорциональный разности между заданным и фактическими значениями воспроизводимой величины. Сигнал рассогласования (в виде напряжения или тока) поступает на вход усилителя, а затем на исполнительный электродвигатель, осуществляющий такое движение управляемого объекта, при котором сигнал рассогласования уменьшается. В отсутствие сигнала рассогласования ротор электродвигателя находится в покое. Различают следящий электропривод с непрерывным и дискретным управлением. Особенностью первого является непрерывное регулирование напряжения (мощности) исполнительного электродвигателя в функции сигнала рассогласования. В простейшем случае эта зависимость линейна. Следящий электропривод с дискретным управлением подразделяются на релейные и импульсные. В релейных следящих электроприводах в качестве усилителя используют бесконтактные реле, которые при определённой величине сигнал рассогласования включают исполнительный электродвигатель на полную мощность. В импульсных следящих электроприводах включение исполнительного электродвигателя осуществляется периодически, через определённые (равные) промежутки времени управляющими импульсами тока, амплитуда, длительность или частота которых являются функцией сигнала рассогласования. В большинстве следящих электроприводах задаваемой величиной является угол поворота входного вала, а регулируемой — угол поворота выходного вала, с которым связан управляемый объект. В качестве измерительных преобразователей наибольшее распространение в таких устройствах получили потенциометры и индукционные машины переменного тока типа сельсинов или поворотных трансформаторов. Следящие электропривода находят применение в различных системах управления, передачи информации и измерения. При управлении следящим электроприводом от ЭВМ система управления воздействует на электропривод через цифроаналоговый преобразователь (ЦАП). Если использовать терминологию, принятую в теории автоматического регулирования, то можно сказать, что ЭВМ является генератором управляющего воздействия, дискриминатором ошибки и цифровым фильтром, оптимизирующим выходное воздействие для привода. Аналого-цифровой преобразователь перемещения с импульсным датчиком положения Для обеспечения высоких требований, предъявляемых к контурно - позиционному управлению исполнительного механизма оборудования с ЧПУ, необходимы прецизионные преобразователи, измеряющие перемещение исполнительного механизма. Такие преобразователи должны измерять положение с разрешающей способностью 1 мкм и менее, определять направление движения, его скорость, а в некоторых случаях и ускорение. Измерительный преобразователь перемещения (ИПП) состоит из датчика положения (ДП), измерительной системы (ИС), преобразующей сигнал датчика в цифровой сигнал, воспринимаемый У ЧПУ.
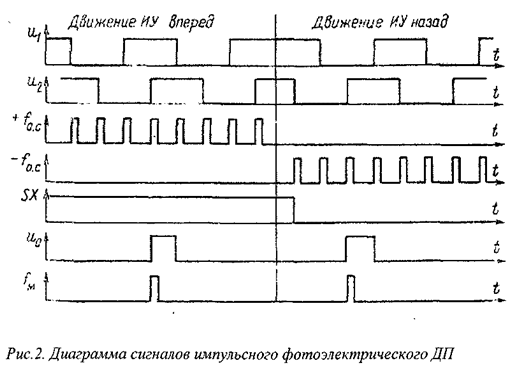
Фотоэлектрические датчики положения используют принцип модуляции светового потока при взаимном перемещении шкалы датчика относительно съемника. Импульсные фотоэлектрические датчики имеют растровую шкалу, на которой с постоянным шагом нанесены риски таким образом, что прозрачные просветы и непрозрачные участки — штрихи шкалы имеют одинаковую ширину s/2 (рис. 1). Число штрихов шкалы равно отношению длины шкалы к шагу s. Для круговых датчиков это число определяет число дискрет перемещения NДП на оборот датчика. Съемник имеет две секции, каждая из которых содержит пару просветов. Начало просвета второй секции сдвинуто относительно конца штриха первой секции на V4 шага s. С каждой парой просветов съемника совмещена встречновключенная пара фотодиодов (ФД1, ФД2 для первой секции, ФДЗ, ФД4 для второй секции). При движении шкалы вдоль съемника происходит модуляция светового потока в просветах съемника и в токах i1 — i4 протекающих через фотодиоды, появляется периодическая составляющая. Первая гармоника суммы токов i1 , i2 сдвинута относительно первой гармоники суммы токов i3 , i4 на 90° в результате пространственного сдвига секций съемника. Использование встречного включения фотодиодов позволяет скомпенсировать влияние изменения светового потока на постоянную составляющую суммарных токов фотодиодов. Погрешность датчика, обусловленная неравномерностями нарезки шкалы, уменьшается ввиду того, что на каждый фотодиод попадает световой поток от нескольких просветов шкалы.
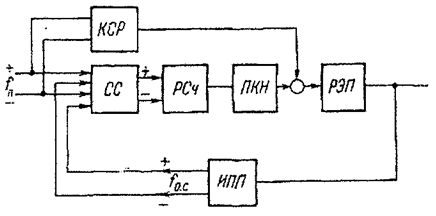
На шкале и съемнике ниже описанного основного растрового сопряжения имеется растровое сопряжение называемое нуль-меткой, не показанное на рис. 1. Это группа штрихов и просветов, позволяющая зафиксировать абсолютное положение линейного ДП или положение кругового ДП в пределах оборота. С просветами нуль-метки съемника совмещены фотодиоды подобно тому, как это выполнено для его основных секций. Аналоговые сигналы с фотодиодов поступают на входы усилителей-формирователей УФ1, УФ2; на выходах которых формируются нормализованные прямоугольные напряжения u0 , u1 , u2 , (Рис. 2). Для увеличения числа импульсов ДП на оборот вала используется специальная схема, временная диаграмма работы которой соответствует рис. 2. Схема на рис. 2 имеет два канала: на выходе которых возникают последовательности импульсов унитарного кода, частота которых fo . c . пропорциональна скорости вращения вала ДП. Число импульсов с выхода схемы рис. 2 в четыре раза больше числа прорезей шкалы ДП. Этот эффект достигается в результате формирования узких импульсов по переднему фронту и срезу напряжений u1 ,u2 выходов УФ1, УФ2. Для определения направления движения исполнительного механизма необходимо выработать признак изменения направления SX. Из временной диаграммы на рис. 2 очевидно, что при движении в одном направлении между каждыми двумя перепадами напряжения u2 имеется один перепад напряжения u2 , причем при движении вперед за положительным фронтом и/ следует положительный фронт u2 . Пусть этой ситуации соответствует логическая единица на выходе SX и учетверенная выходная последовательность проходит по каналу +fo . c . . При смене направления движения на противоположное между двумя перепадами напряжения и2 отсутствует перепад и1 , что является признаком изменения состояния SX нa нулевое, в результате чего выходная последовательность переключается на канал –fo . c . . При обратной смене направления (на временной диаграмме этот случай не показан) между двумя перепадами u1 не будет перепада u2 , что и является признаком возврата SХ в состояние логической единицы. В течение одного оборота кругового ДП формируется один импульс нуль-метки fо.м. . На рис. 2 изображено формирование сигнала нуль-метки для случая, когда прорези нуль-метки находятся на одной вертикали с прорезями второй секции съемника. С появлением полупроводниковых излучателей света эксплуатационные характеристики импульсных фотоэлектрических ДП значительно улучшились. Простота измерительной системы и ее малые габариты позволили создавать на базе этих ДП измерительные преобразователи перемещения, встраиваемые в исполнительные двигатели электроприводов, в результате чего созданы СЭП исполнительных устройств с полузамкнутой структурой, удовлетворяющие требованиям по точности, предъявляемым к оборудованию с ЧПУ различного назначения. На рис. 3 приведена структура СЭП, на вход которого поступает сигнал заданного перемещения в виде импульсов fn , с выхода микроинтерполятора. Этот сигнал, так же как сигнал обратной связи fо. c . от ИПП поступает на схему синхронизации СС, необходимую для того, чтобы избежать потери импульсов при одновременном приходе импульсов по каналам задания и обратной связи. С выхода СС импульсы поступают на вход реверсивного счетчика РСч, число в котором пропорционально рассогласованию между заданным и фактическим положением СЭП. Это число преобразуется в напряжение преобразователем код—напряжение ПКН и поступает на вход привода регулируемой скорости РЭП. Для повышения динамической точности СЭП используется схема компенсации скоростного рассогласования КСР, формирующая сигнал, пропорциональный заданной скорости перемещения, т. е. частоте программы fn . Рассмотренный СЭП широко используется в оборудовании различного назначения, предназначенном для УЧПУ первого и второго поколений. В исполнительных устройствах роботов для обеспечения абсолютного отсчета положения звеньев манипулятора используются фотоэлектрические кодовые ДП. Кодовые ДП могут быть круговыми и линейными. Отличие от рассмотренных выше импульсных ДП заключается в том, что на шкале кодового ДП нанесена кодовая маска, причем число дорожек шкалы равно числу разрядов датчика. Длина штрихов и просветов каждой из дорожек различна и определяется весом разряда, которому соответствует данная дорожка. Соответственно увеличению числа дорожек растет и число фотодиодов, устанавливаемых на съемнике. Кодовая маска ДП наносится в коде Грея или другом коде, обеспечивающем ошибку считывания, не более единицы младшего разряда кода. Преобразование кода маски в двоичный код выполняется измерительной системой, которая конструктивно объединяется с ДП, образуя интегрированный ИПП. При числе разрядов ДП, большем 10, кодовые датчики выполняются двух- отсчетными. В этом случае кодовые диски грубого и точного отсчета связаны прецизионным редуктором, а измерительная система дополняется схемой согласования отсчетов.
Рис.3. Структура СЭП с импульсным фотоэлектрическим ДП
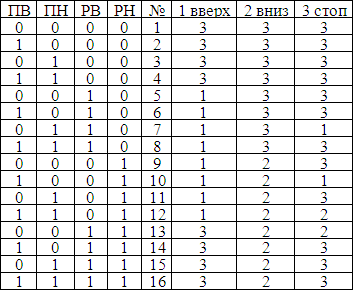
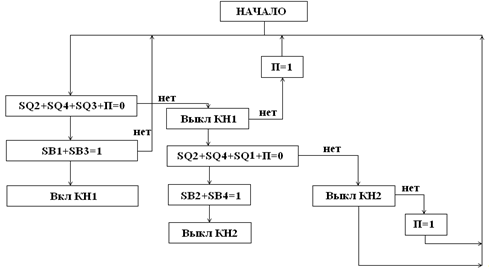
Задача Составить таблицу состояний автоматизации работы грузового подъемника в соответствии с заданными условиями техпроцесса: подъемник перемещается с одного уровня на другой реверсивным приводом, включаемым контакторами КМ1 и КМ2. Пуск подъемника осуществляется по команде от этажных кнопок SB1, SB2, SB3, SB4. Аварийные ситуации предотвращаются руле перегрузки, конечными выключателями SQ1 и SQ2 и контролем закрытия дверей шахты SQ3, SQ4. Все командные переменные сведены к четырем: пуск вверх ПВ - нажаты кнопки "Вверх" SB1, SB3 на нервом или втором этаже; пуск вниз ПН - нажаты кнопки "Вниз" SB2, SB, 4 на первом или втором этаже; есть разрешение двигаться вверх РВ - закрыты все двери, не нажат конечный выключатель SQ1, нет перегрузки; есть разрешение двигаться вниз РН - закрыты все двери, не нажат конечный выключатель SQ2, нет перегрузки. Число возможных состояний три: 1 -движение вверх, 2 - движение вниз, 3 - кабина неподвижна. Таблица состояний:
Схема на логических элементах
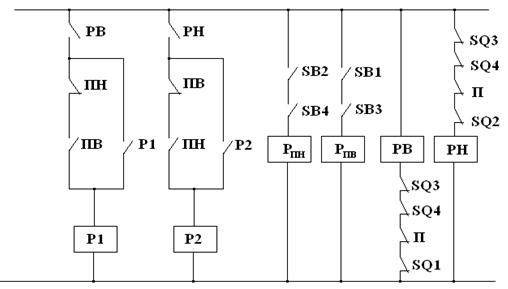
Схема на реле
Алгоритм программы
Литература 1. А.М. Корытин, Н.К. Петров, С.Н. Радимов, Н.К. Шанарев. Автоматизация типовых технологических процессов и установок: Учебник для вузов/ -2-еизд., перераб. и доп. - М.: Энерго-атомиздат, 1988. 2. Булгаков А. А., Программное управление системами машин, М., 1975. 3. Схиргсладзе А.Г. Работа оператора на станках с программным управлением: Учеб. пособие для проф. учеб, заведений. — 3-е изд. стер.—М.: Высш. шк.; Изд. центр "Академия", 2000. |