| Индивидуальное задание
| № п/п
|
Раздел 1
|
Раздел 2
|
| 
|
ПФ объекта управления,
|

|

|

|

|

|
| *
|

|

|
20
|
30
|
0.02
|
0.05
|
0.5
|
1 Повышение точности системы путем увеличения порядка астатизма системы
1.1 Исследование статической системы
система автоматический управление астатизм коррекция
В соответствии с индивидуальным заданием пронаблюдаем за влиянием степени астатизма системы на точность и устойчивость системы автоматического управления, передаточная функция которой в разомкнутом состоянии представлена выражением:
 . (1.1) . (1.1)
Система в замкнутом состоянии является статической, тогда исходя из аналитических расчетов:
- ошибка по положению равна;
- ошибка по скорости и ускорению равна  . .
Переходная функция замкнутой системы представлена на рисунке 1.1.
Из рисунка 1.1 видно, что статическая ошибка системы равна  , что соответствует аналитическим расчетам. , что соответствует аналитическим расчетам.

Рисунок 1.1 – Переходная функция статической замкнутой системы
Для наблюдения за реакцией системы на различные воздействия удобно составить M-file со следующим программным кодом:


Таким образом, получим переходные процессы изменения выходной величины и сигнала ошибки от функции Хевисайда, линейно нарастающего воздействия и сигнала, увеличивающегося с постоянным ускорением (рисунок 1.2).

а)
б)
в)
Рисунок 1.2 – Реакция статической системы на различные входные воздействия
а) переходная функция;
б) реакция на линейно нарастающий сигнал;
в) реакция на сигнал, увеличивающийся с постоянным ускорением
1.2 Исследование системы с астатизмом первого порядка
Для повышения точности системы в установившихся режимах можно повысить порядок астатизма системы, для чего необходимо передаточную функцию разомкнутой системы (1.1) разделить на оператор Лапласа:

По ЛАЧХ и ЛФЧХ разомкнутой системы (рисунок 1.3) можно сказать, что система в замкнутом состоянии будет устойчива. Тогда рассчитаем аналитически ошибки системы в типовых режимах:2.5
- ошибка по положению равна  ; ;
- ошибка по скорости  1 / 24 =0,042 1 / 24 =0,042
- ошибка по ускорению равна  . .
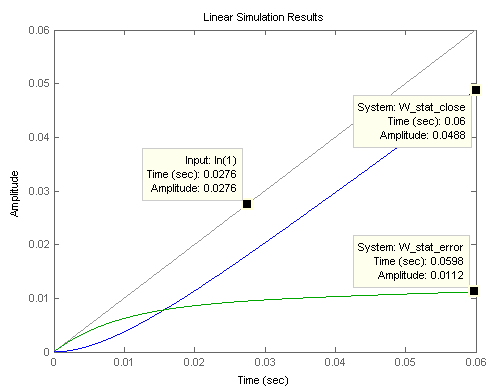
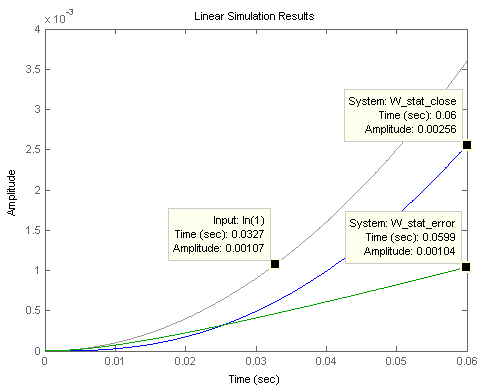
Эти значения соответствуют результатам построения переходных процессов (рисунок 1.4).
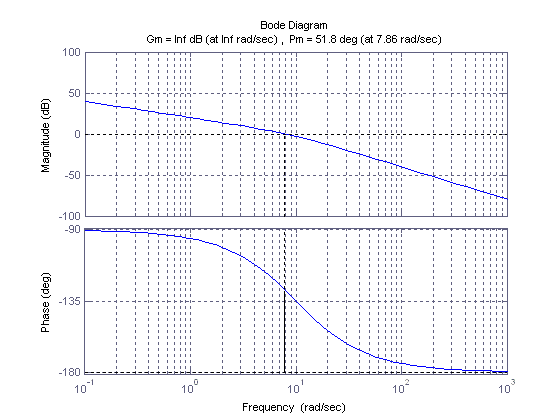
Рисунок 1.3 – Логарифмические частотные характеристики разомкнутой системы с астатизмом 1-го порядка

а)

б)
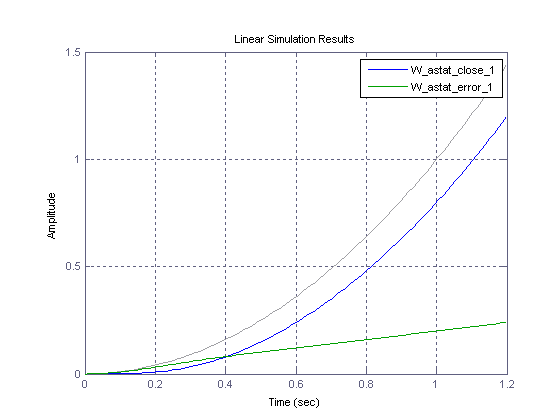
в)
а) переходная функция;
б) реакция на линейно нарастающий сигнал;
в) реакция на сигнал, увеличивающийся с постоянным ускорением
Рисунок 1.4 – Реакция системы с астатизмом 1-го порядка на типовые входные воздействия
1.3 Исследование системы с астатизмом второго порядка
При увеличении порядка астатизма системы до второй степени система становится неустойчивой (рисунок 1.5), поэтому нет смысла рассматривать точность системы в установившихся режимах.
Анализируя влияние астатизма системы на точность и устойчивость, можно сделать следующие выводы:
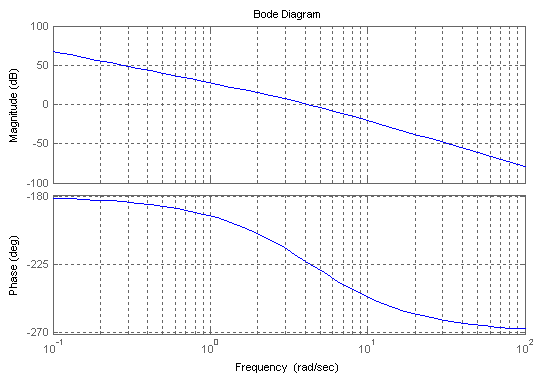
Рисунок 1.5 – Логарифмические частотные характеристики разомкнутой системы с астатизмом 2-го порядка
2 Коррекция путем изменения коэффициента усиления системы
2.1 Исследование влияние величины коэффициента усиления разомкнутой системы на запасы устойчивости
В соответствии с индивидуальным заданием пронаблюдаем за влиянием коэффициента усиления системы пропорционального регулятора на устойчивость, точность и качество системы автоматического управления.
Передаточная функция объекта управления:
 . (2.1) . (2.1)
Распределение нулей и полюсов замкнутой системы и частотные характеристики разомкнутой системы (рисунок 2.1) говорят о неустойчивости замкнутой системы при единичном коэффициенте усиления пропорционального регулятора.

Рисунок 2.1 - Распределение нулей и полюсов замкнутой системы и частотные характеристики разомкнутой системы
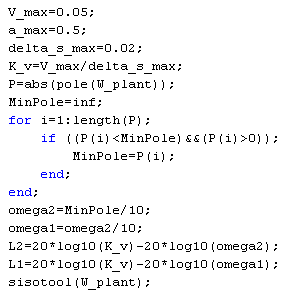
Для наблюдения влияния величины пропорционального регулятора на устойчивость, точность и качество системы автоматического управления создадим M-file со следующим программным кодом:

Анализируя логарифмические частотные характеристики разомкнутой системы (рисунок 2.2), можно сказать, что при увеличении коэффициента усиления системы ЛАЧХ смещается вверх, при этом увеличивается частота среза, следовательно, запасы устойчивости по амплитуде и по фазе уменьшаются.

Рисунок 2.2 - Логарифмические частотные характеристики разомкнутой системы при изменении коэффициента усиления регулятора
2.2 Исследование зависимости ошибки в установившихся режимах от коэффициента усиления системы
Из рисунка 1.2 видно, что из пяти выбранных устойчивыми являются только первые две системы с коэффициентами усиления регуляторов  и и  . Проанализируем качество систем с этими регуляторами. Для этого дополним M-file следующим программным кодом : . Проанализируем качество систем с этими регуляторами. Для этого дополним M-file следующим программным кодом :

Аналитический расчет ошибок системы в типовых режимах дает следующие результаты:
система с :
- ошибка по положению равна  ; ;
- ошибка по скорости  ; ;
- ошибка по ускорению равна  ; ;
система с  : :
- ошибка по положению равна  ; ;
- ошибка по скорости  ; ;
- ошибка по ускорению равна .
Анализируя полученные результаты и графики переходных процессов (рисунок 2.3), можно сделать следующие выводы: при увеличении (уменьшении) коэффициента усиления системы ее устойчивость уменьшается (увеличивается), увеличивается (уменьшается) перерегулирование, колебательность и время переходного процесса, возрастает (снижается) быстродействие, точность системы повышается (понижается).

a)

б)
а) переходная функция;
б) реакция на линейно нарастающий сигнал
Рисунок 2.3 – Влияние коэффициента усиления на качество системы
2.3 Определение коэффициента усиления пропорционального регулятора для получения требуемого качества системы
В индивидуальном задании необходимо обеспечить следующие показатели качества управления:
- запас устойчивости по амплитуде  ; ;
- запас устойчивости по фазе  ; ;
- максимальная ошибка слежения  при задающем воздействии, максимальная скорость и ускорение изменения которой при задающем воздействии, максимальная скорость и ускорение изменения которой  и и  . .
Т.к. у нас система с астатизмом первого порядка, следовательно, составляющая ошибки по положению равна 0, а составляющая ошибки по скорости определится как  . Откуда . Откуда 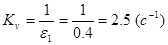 . .
Значит, минимальный коэффициент усиления разомкнутой системы должен быть не меньше, чем  . .
Для построения запретной зоны удобно воспользоваться программным кодом:
После чего накладываем ограничения на систему (рисунок 2.4), опускаем ЛАЧХ разомкнутой системы (путем уменьшения коэффициента усиления регулятора) практически до запретной зоны, чтобы обеспечить требуемые запасы устойчивости (рисунок 2.5).

Рисунок 2.4 – Меню построения запретной зоны

Рисунок 2.5 – Настройка коэффициента усиления регулятора
Хорошие запасы устойчивости достигаются при 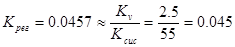 . .
Экспортируем параметры регулятора в рабочую область MATLABа (Workspace) (рисунок 2.6). После чего пронаблюдаем за реакцией системы на типовые воздействия (рисунок 2.7):


Рисунок 2.6 – Экспорт параметров регулятора в
Workspace

а)
б)
в)
а) переходная функция;
б) реакция на линейно нарастающий сигнал со скоростью  ; ;
в) реакция на сигнал, увеличивающийся с постоянным ускорением 
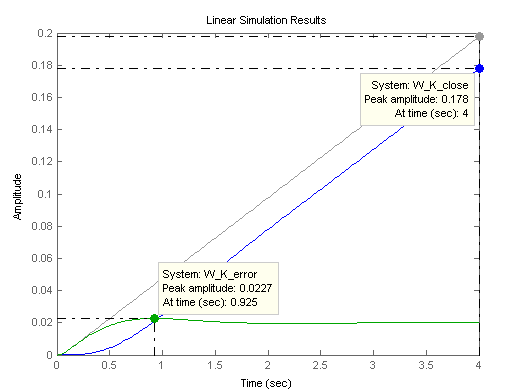
Рисунок 2.7 – Реакция системы на типовые входные воздействия
Максимальная динамическая ошибка системы на рисунке 2.7, а) ( ) и рисунке 2.7, б) ( ) и рисунке 2.7, б) ( ) говорят о том, что во входном воздействии не учитывались либо максимальная скорость, либо максимальное ускорение. Однако видно, что установившаяся ошибка по положению равна нулю, установившаяся ошибка по скорости меньше требуемой. ) говорят о том, что во входном воздействии не учитывались либо максимальная скорость, либо максимальное ускорение. Однако видно, что установившаяся ошибка по положению равна нулю, установившаяся ошибка по скорости меньше требуемой.
Для учета максимального ускорения изменения входного сигнала и ограничения его по скорости построен график, изображенный на рисунке 2.7, в). Из графика видно, что максимальная динамическая ошибка меньше требуемой по заданию. Однако при создании регулятора учитывалась только составляющая ошибки по скорости. При подаче сигнала, изменяющегося с большим ускорением, необходимо учитывать составляющую ошибки по ускорению, иначе динамическая ошибка может превысить заданную (рисунок 2.8).

Рисунок 2.8 – Реакция системы на сигнал, увеличивающийся с постоянным ускорением 
В данном случае погрешность позиционирования не такая уж и большая, однако часто требуется устранить и такую погрешность, для чего воспользуемся выражением для определения величины ошибки астатической системы при параболическом входном воздействии [1, с. 208-210]:
 (2.2) (2.2)
Из выражения (2.2) определяем необходимый коэффициент усиления системы  , тогда , тогда  . При таком коэффициенте корректирующего устройства максимальная динамическая ошибка меньше, чем требуемая по заданию (рисунок 2.9). . При таком коэффициенте корректирующего устройства максимальная динамическая ошибка меньше, чем требуемая по заданию (рисунок 2.9).
Рисунок 2.9 – Реакция системы на сигнал, увеличивающийся с постоянным ускорением
Однако при таком регуляторе и таких параметрах входного воздействия не удается одновременно удовлетворить требованиям точности и запасам устойчивости системы (рисунок 2.10). Следовательно, безынерционный регулятор в данном случае не может справиться с отработкой входного воздействия, меняющегося с большим ускорением, значит, необходимо применить другие виды регуляторов.

Рисунок 2.10 - Распределение нулей и полюсов замкнутой системы и частотные характеристики разомкнутой системы при 
Вывод:
· преимущества пропорционального регулятора:
– наиболее простой способ обеспечения запаса устойчивости
– простая реализация
· недостатки пропорционального регулятора:
– невозможно добиться устойчивости и одновременной точности САР
· П-регулятор представляет собой усилительное звено с коэффициентом усиления К. Передаточная функция регулятора имеет вид:  . .
3 Коррекция с отставанием по фазе (применение интегрирующих звеньев)
3.1 Требования к системе управления
В соответствии с индивидуальным заданием необходимо обеспечить следующие показатели качества:
- запас устойчивости по амплитуде  ; ;
- запас устойчивости по фазе  ; ;
- максимальная ошибка слежения  при задающем воздействии, максимальная скорость и ускорение изменения которой при задающем воздействии, максимальная скорость и ускорение изменения которой  и и  ; ;
- время регулирования  ; ;
- перерегулирование  . .
В связи с ужесточившимися по сравнению с пунктом 2 требованиями к качеству регулирования применением пропорционального регулятора невозможно добиться устойчивости и одновременной точности системы автоматического регулирования. Для коррекции объекта управления (2.1) в данном случае следует применить интегрирующее корректирующее устройство, имеющее передаточную функцию:
 . .
Причем  . .
3.2 Аналитическое определение параметров регулятора
Для настройки параметров регулятора воспользуемся методикой, представленной в [2, с. 338 - 342]:
1. Дополним передаточную функцию объекта коэффициентом  , удовлетворяющим требования к системе в области низких частот: , удовлетворяющим требования к системе в области низких частот:
 . .
Следовательно,
 . .
2. Определим частоту, на которой  . .
Из логарифмических частотных характеристик разомкнутой системы (рисунок 3.1) видно, что система обладает запаздыванием по фазе  на частоте на частоте  . .
3. Зададим значение нуля регулятора:

4. Определим значение полюса регулятора:

5. В результате передаточная функция регулятора примет вид:
 (3.1) (3.1)

Рисунок 3.1 – Логарифмические частотные характеристики разомкнутой системы
ЛЧХ скорректированной системы (рисунок 3.2) говорят о том, что с помощью синтезированного корректирующего устройства удалось добиться приемлемых (по крайней мере близких к требуемым) показателей качества системы. Однако регулятор еще требует «подгонки».
Для построения регулятора с отставанием по фазе удобно воспользоваться следующим программным кодом:
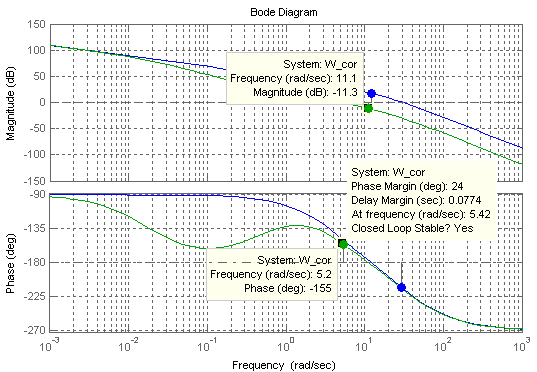
Рисунок 3.2 – Логарифмические частотные характеристики скорректированной системы
3.3 Определение параметров регулятора с помощью среды Control System Toolbox
Более профессиональный подход к синтезу интегрирующего корректирующего устройства может быть осуществлен при помощи MATLAB Control System Toolbox. Для этого запускаем функцию sisotool(«объект управления») и создаем запретные зоны (рисунок 3.3):


Рисунок 3.3 – Запретные зоны на логарифмических частотных характеристиках объекта управления и корневом годографе
Анализ рисунка 3.3 позволяет сказать о неустойчивости замкнутой системы и наметить пути дальнейшей коррекции системы:
- необходимо добавить регулятор интегрирующего типа (полюс и ноль корректирующего устройства);
- можно уменьшить коэффициент усиления, приблизив ЛАЧХ к запретной зоне.
Изменяя величины нуля, полюса и коэффициента усиления регулятора, добиваемся требуемых показателей качества (рисунки 3.4 и 3.5). Передаточная функция регулятора (рисунок 3.6) имеет следующий вид:

Сравнение результатов (3.1) и (3.2) говорит о схожести регуляторов, и выбор его конкретной конфигурации лежит в области инженерного творчества и должен опираться на соображения целесообразности, простоты реализации и минимизации стоимости.

Рисунок 3.4 – Частотные характеристики и корневой годограф скорректированной системы управления

Рисунок 3.5 – Переходная функция скорректированной системы

Рисунок 3.6 – Частотные характеристики объекта управления, регулятора и скорректированной системы
Экспортируем ПФ регулятора в рабочую область MATLABа и определим ошибку системы при типовых воздействиях (рисунок 3.7):


а)

б)

в)
а) реакция на линейно нарастающий сигнал со скоростью  ; ;
б) реакция на сигнал с постоянным ускорением  ; ;
в) реакция на сигнал с постоянным ускорением 
Рисунок 3.7 – Реакция системы на типовые входные воздействия
Как видно из графиков переходных процессов, установившаяся ошибка при линейно нарастающем воздействии меньше требуемой по заданию, однако неучтенная составляющая погрешности по ускорению является существенной даже при ускорении сигнала  (рисунок 3.7). Для устранения этой погрешности необходимо произвести перерасчет регулятора с учетом перестройки запретной зоны по коэффициенту усиления. Для этого воспользуемся методикой, описанной, например, в [3]. (рисунок 3.7). Для устранения этой погрешности необходимо произвести перерасчет регулятора с учетом перестройки запретной зоны по коэффициенту усиления. Для этого воспользуемся методикой, описанной, например, в [3].

При перестроении запретной зоны (рисунок 3.8) выясняется, ЛАЧХ скорректированной системы заходит в запретную зону, чем и объясняется неудовлетворительная точность позиционирования системы при параболическом входном воздействии (рисунок 3.7, б).

Рисунок 3.8 – Частотные характеристики и корневой годограф скорректированной системы управления с перестроенной запретной зоной
Следовательно, для получения удовлетворительной точности системы по всем требованиям необходимо применять другой тип регулятора.
Вывод:
· преимущества ПИ-регулятора:
– характеристики системы в области низких частот лучше, чем в случае коррекции за счет изменения коэффициента усиления
– запасы устойчивости сохраняются и улучшаются
– снижается чувствительность к высокочастотному шуму
· недостатки ПИ-регулятора:
– неудовлетворительная точность позиционирования системы при параболическом входном воздействии
– меньшее быстродействие, более длительное время установления
· ПИ-регулятор применяется в области низких частот
· ПИ-регулятор – регулятор с отставанием по фазе. Его передаточная функция имеет вид:  , где , где 
4 Коррекция с опережением по фазе (применение дифференцирующих звеньев)
4.1 Требования к системе управления
В соответствии с индивидуальным заданием необходимо обеспечить следующие показатели качества:
- запас устойчивости по амплитуде ;
- запас устойчивости по фазе  ; ;
- максимальная ошибка слежения  при задающем воздействии, максимальная скорость и ускорение изменения которой при задающем воздействии, максимальная скорость и ускорение изменения которой  и и  ; ;
- время регулирования ;
- перерегулирование  . .
Для коррекции объекта управления (2.1) применим дифференцирующее корректирующее устройство, имеющее передаточную функцию:
 . .
Причем  . .
Если регулятор с отставанием по фазе применяется в области низких частот, то дифференцирующий регулятор – в среднечастотной области для поднятия фазовой характеристики с целью увеличения запаса устойчивости по фазе.
Простым коэффициентом усиления не удается совместить требование устойчивости системы и показателей качества (рисунок 4.1). Введение в систему последовательного корректирующего устройства дифференцирующего типа (рисунок 4.2) позволяет добиться устойчивости, требуемого запаса устойчивости по амплитуде, быстродействия, приемлемого запаса устойчивости по фазе. Однако некоторые показатели качества (такие как перерегулирование (рисунок 4.3) и запас устойчивости по фазе) выходят за рамки требуемых.
Передаточная функция корректирующего устройства имеет вид:
 (4.1) (4.1)
Недостатком такого типа регулятора является возможные большие сигналы на выходе регулятора (рисунок 4.4), способные вывести систему из строя или заставить ее работать в нелинейном режиме.
Реакция скорректированной системы на типовые воздействия (рисунок 4.5, в) говорит о полном соответствии скорректированной системы требованиям точности позиционирования.

Рисунок 4.1 – Частотные характеристики системы управления, скорректированной изменением коэффициента усиления

Рисунок 4.2 – Частотные характеристики системы управления, скорректированной дифференцирующим устройством

Рисунок 4.3 – Переходная функция скорректированной системы

Рисунок 4.4 – Переходная функция скорректированной системы и
сигнала с выхода регулятора

а)

б)

в)
Рисунок 4.5 – Реакция системы на типовые входные воздействия
а) переходная функция;
б) реакция на линейно нарастающий сигнал со скоростью ;
в) реакция на сигнал, увеличивающийся с постоянным ускорением 
Вывод:
· преимущества Диференцирующего-регулятора:
– позволяет добиться устойчивости, требуемого запаса устойчивости по амплитуде, быстродействия, приемлемого запаса устойчивости по фазе
· недостатки Диференцирующего-регулятора:
– некоторые показатели качества (такие как перерегулирование (рисунок 4.3) и запас устойчивости по фазе) выходят за рамки требуемых
– на выходе регулятора могут появляться большие сигналы, способные вывести систему из строя или заставить ее работать в нелинейном режиме
– система с Диференцирующего-регулятором более чувствительна к высокочастотному шуму
· Диференцирующего-регулятор применяется в средне частотнойобласти
5 Коррекция с опережением и отставанием по фазе (применение интегро-дифференцирующих звеньев)
5.1 Требования к системе управления
В соответствии с индивидуальным заданием необходимо обеспечить следующие показатели качества:
- запас устойчивости по амплитуде  ; ;
- запас устойчивости по фазе  ; ;
- максимальная ошибка слежения  при задающем воздействии, максимальная скорость и ускорение изменения которой при задающем воздействии, максимальная скорость и ускорение изменения которой  и ; и ;
- время регулирования  ; ;
- перерегулирование  . .
5.2 Аналитическое определение параметров регулятора
Для настройки параметров регулятора воспользуемся методикой, представленной в [2, с. 355 - 359]:
1. Займемся синтезом части регулятора, обеспечивающей отставание по фазе. Зададим запас устойчивости по фазе в  . Определяем частоту, на которой фазовый сдвиг функции . Определяем частоту, на которой фазовый сдвиг функции  равен равен  . .  , тогда , тогда  . Разомкнутая система на частоте . Разомкнутая система на частоте  обладает коэффициентом передачи 2,321, тогда обладает коэффициентом передачи 2,321, тогда  . .
2. Получаем передаточную функцию регулятора: 
3. Чтобы синтезировать регулятор с опережением по фазе, используем частотные характеристики разомкнутой системы с передаточной функцией  . .
4. Регулятор должен обеспечивать запас устойчивости по фазе в  . Определяем частоту, на которой фазовый сдвиг функции . Определяем частоту, на которой фазовый сдвиг функции  равен равен  . . 
5. При этом значение частотной функции эквивалентной разомкнутой системы равно  . Тогда требуемый фазовый сдвиг, создаваемый регулятором, должен быть равен . Тогда требуемый фазовый сдвиг, создаваемый регулятором, должен быть равен  . .
6. Определяем коэффициенты, необходимые для нахождения ПФ регулятора:


7. Передаточная функция регулятора примет вид: 
8. Результирующая ПФ регулятора с отставанием и опережением по фазе будет равна: 
Для коррекции объекта управления (2.1) применим дифференцирующее корректирующее устройство, имеющее передаточную функцию:
 . .
Введение в систему последовательных корректирующих устройств дифференцирующего или интегрирующего типа не позволяет добиться требуемых запасов устойчивости при одновременном удовлетворении остальных показателей качества, таких как перерегулирование и время регулирования. Введение в систему последовательного корректирующего устройства интегро-дифференцирующего типа (рис. 5.2) позволяет добиться одновременного удовлетворения всех показателей качества (рис. 5.3).
Передаточная функция корректирующего устройства имеет вид (рис. 5.1):
 (5.1) (5.1)
Реакция скорректированной системы на типовые воздействия (рисунок 5.4) говорит о полном соответствии скорректированной системы требованиям точности позиционирования.

Рисунок 5.1 – Частотные характеристики объекта управления, регулятора и скорректированной системы
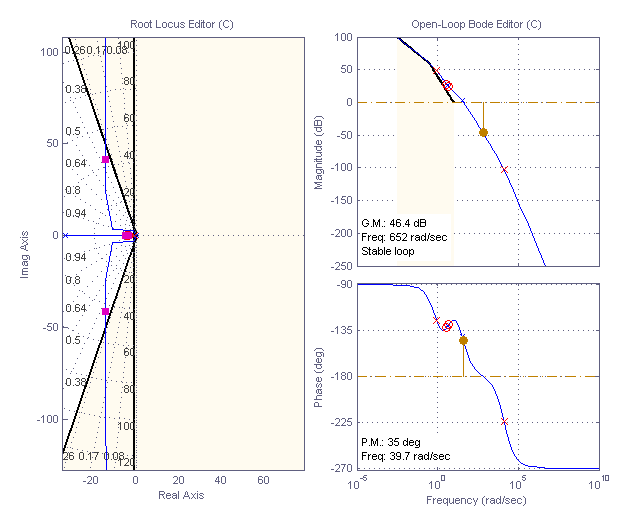
Рисунок 5.2 – Частотные характеристики системы управления, скорректированной интегро-дифференцирующим устройством

Рисунок 5.3 – Переходная функция скорректированной системы

а)

б)
а) реакция на линейно нарастающий сигнал со скоростью  ; ;
б) реакция на сигнал, увеличивающийся с постоянным ускорением 
Рисунок 5.4 – Реакция системы на типовые входные воздействия
Вывод:
· преимущества ПИД-регулятора:
– большая гибкость по сравнению с ПИ- и ПД-регуляторами.
– обеспечивает одновременное удовлетворение всех показателей качества системы
· ПИД-регулятор применим в области низких частот (интегральная составляющая) и в области высоких частот (дифференциальная составляющая).
· ПИД-регулятор представляет собой комбинацию ПИ- и ПД-регуляторов. Его передаточная функция имеет вид: 
Перечень ссылок:
1. Теория систем автоматического регулирования. Бесекерский В.А., Попов Е.П., издательство «Наука», Главная редакция физико-математической литературы, М. 1972, 768 стр.
2. Филлипс Ч., Харбор Р. Системы управления с обратной связью. – М.: Лаборатория Базовых Знаний, 2001 – 616 с. : ил.
3. В.Н. Бакаев. Теория автоматического управления: учебное пособие. Вологодский государственный технический университет, кафедра дистанционного и заочного обучения. Вологда 2004. Электронная версия.
|