ВВЕДЕНИЕ
Для осуществления управляемого полета в приземном или космическом пространстве на борту летательного аппарата (ЛА) необходимо иметь системы ориентации и навигации, определяющие такие навигационные параметры, как курсовой угол (курс), углы крена, тангажа, величину и направление вектора скорости полета, направление на цель и расстояние.
В настоящее время практически не существует Л А, ориентация и навигация которых осуществлялась бы без гироскопических приборов. Это объясняется тем, что при пилотировании и управлении Л А на их борту необходимо с высокой точностью моделировать какие либо опорные (базовые) направления, принимаемые за начало отсчета, относительно которых определялось бы положение объекта. Такими направлениями могут быть, например, направление вертикали места, плоскости меридиана, главной ортодромии и др.
Реализация этих базовых направлений на неподвижном относительно Земли основании не представляет особых трудностей. Однако эти так называемые простейшие указатели направлений мало пригодны для применения на подвижных объектах. Гироскопические приборы благодаря своим специфическим свойствам в большинстве случаев меньше подвержены внешним возмущениям и позволяют получать более достоверную информацию о параметрах движения Л А.
Для выполнения автоматического полета по заданному маршруту и для решения других задач навигации необходима высокая точность выдачи текущего гироскопического курса полета. В связи с этим важное значение приобретает съем информации с гироскопических систем ориентации и навигации (ГСОиН). От того, с какой точностью производится автоматический съем информации гироскопического курса, зависит и точность счисления текущих координат места
ЛА, точность полета по линии заданного пути, точность выхода на намеченный пункт маршрута. Требования к точности съема информации с ГСОиН в настоящее время возрастает в связи с появлением и разработкой имеющих дрейф 0.001 о/ч лазерных, с электростатическим подвесом и т.д. гироскопов для навигационных систем.
Насколько важна высокая точность измерения курса ГСОиН достаточно хорошо иллюстрирует следующий пример.
При поступлении на эксплуатацию самолета ИЛ-62, оборудованного курсовой системой ТКС-П с дрейфом гироскопов 0,5 о/ч и доплеровской системой с ошибкой измерения угла сноса над сушей 0.33°, метод ориентации курсовой системы на этом самолете обеспечивал точность 2.5°, что составляет на 600-километровой дистанции при полете от пункта маршрута А к Б отклонение 6x28 км. Метод ориентации КС на самолете ТУ-154 обеспечивал точность 0.25°, что позволило повысить точность навигации примерно в 3 раза при использовании аналогичного навигационного оборудования; в конце 600-километровой дистанции предельные значения отклонений составляли 4.7x8 км.
Значит, при повышении точности автономного счисления координат происходит сокращение траектории полета, что приводит к экономии летного времени. Проанализируем источники ошибок измерения путевого угла.
Показания курса выдерживаются основным и контрольным гироагрегатом и индицируются на независимых друг от друга указателях штурмана. Смысл такого построения заключается в следующем.
Перед полетом оба гироагрегата выставляют на одно и то же исходное значение гироскопического курса, которое, в общем случае, может не совпадать с истинным (магнитным) курсом ЛА. Эта операция (начальная выставка) обеспечивает привязку гироскопического курса к магнитному (истинному) меридиану, который определяется магнитным (истинным) путевым углом ортодромии МПУо, отсчитывается от меридиана места выставки до направления главной ортодромии.
Если направление ортодромии выбрано совпадающим с направлением меридиана в месте вылета, то начальный магнитный путевой угол ортодромииМПУо, отсчитанный от "начального" магнитного меридиана, при выставке курсовой системы равен нулю. Разность истинных путевых углов ортодромии при изменении долготы полета равна углу сходимости меридианов Е.
Выставку гироагрегатов, как правило, производят от истинного (начального) меридиана места выставки. Тогда при движении по выбранной ортодромии должен выдерживаться ортодромический курс (при отсутствии сноса), численно равный МПУо. В этом случае значение ортодромического курса (ОК) отличается от истинного курса (И К) летательного аппарата на величину Е. Сравнение измеренной в полете разности ОК и ИК с расчетной величиной Е позволяет контролировать точность гироскопического курса. После выставки основного и контрольного гироагрегатов на указателях системы устанавливаются одинаковые показания курса. В полете расхождение показаний курса по указателям штурмана на величину более 1 ° за час означает (при равномерном прямолинейном полете), что гироскопы курсовой системы работают с завышенными уходами. Включать коррекцию по ортодромическому курсу в полете рекомендуется лишь при рассогласовании более 1°-2° с астродатчиком и 2°-3° с магнитным датчиком. Если обнаружатся чрезмерно большие ошибки (более 2-5 о/ч) от ухода гироскопа основного гироагрегата, которые могут быть вызваны какой-либо частичной неисправностью гироскопа, то основной гироскоп не корректируется, а потребители и основной указатель штурмана переключаются на контрольный гироагрегат.
Исследования по определению точности ориентации ГСОиН в азимуте проводились на основе анализа источников ошибок измерения путевого угла (ПУ). Установлено, что погрешность при измерении путевого угла находится по формуле:

Где
 - погрешность начальной выставки ГСОиН в азимуте; - погрешность начальной выставки ГСОиН в азимуте;
 - дрейф гироскопа ГСОиН; - дрейф гироскопа ГСОиН;
 -ошибка измерения угла сноса; -ошибка измерения угла сноса;
 - погрешность вычислителя, - погрешность вычислителя,
Тема данного дипломного проекта “Исследование систем измерения траекторных параметров самолетов при посадке на основе эффекта Мессбауэра”. В данном дипломном проекте будут проанализированы известные методы и средства съема информации с ГСОиН. На основе эффекта Мессбауэра разработано устройство съема информации, которое позволяет существенно уменьшить дрейф гироскопа (что, в свою очередь, позволяет обеспечить высокую точность измерения курса) и обладает чрезвычайной чувствительностью измерений при изменении положения ЛА в пространстве.
1. СПЕЦИАЛЬНЫЙ РАЗДЕЛ
1.1 Обзор с представлением особенностей элементов и устройств съема информации с ГСОиН, анализы методов съема (достоинства и недостатки)
В качестве устройств съема информации с гироскопических систем ориентации и навигации могут применяться самые разнообразные датчики угловых перемещений:
1) потенциометрические;
2) емкостные (конденсаторы);
3) индуктивные (сельсины, индуктосины, импульсины);
4) СКТ, СКВТ;
5) оптические датчики;
Съем информации осуществляется датчиками углов следующим образом: при изменении угловых положений объекта датчики гироскопической системы изменяют относительное расположение своих элементов, жестко связанных с гироскопом, и происходит преобразование перемещения в сигнал удобный для обработки и обобщения.
Перейдем к подробному изложению методов измерения информации и описанию преобразователей.
Метод сопротивления, потенциометры.
В методах сопротивления используется зависимость электрического сопротивления резисторов от различных нсэлектрических величин. Сопротивление R
резистора зависит от многих факторов, в частности, от давления, температуры окружающей среды, деформации и длины резистора. Рассмотрим метод, основанный на изменении омического сопротивления проволочного реостата при перемещении скользящего контакта под действием измеряемой величины (рисунок1.1).Входной величиной преобразователя является угловое линейное перемещение движка, выходной-изменение его сопротивления.
Реостат состоит из каркаса, на который намотан провод, изготовленный из материала с высоким удельным сопротивлением, и токосъемного движка. Движок касается провода. Для обеспечения электрического контакта с подвижным движком в месте касания обмотка зачищается от изоляции. Обмотка делается обычно из манганина, константана, фехраля.
При перемещении контакта величина сопротивления будет изменяться. Если Х-
координата контакта, то:
 (1.1) (1.1)
где
 - сопротивление на единицу длинны реостата: - сопротивление на единицу длинны реостата:
 - постоянная часть сопротивления, соответствующая х=0. - постоянная часть сопротивления, соответствующая х=0.
Коэффициент а, связывающий механическую величину-перемещение и электрическую сопротивление, называется коэффициентом электромеханической связи реостатного преобразователя. Очевидно, чем больше П, тем большей чувствительностью обладает преобразователь. Но слишком большое увеличение а не всегда целесообразно, так как эффективная работа преобразователя определяется не только величиной сопротивления, но и протекающим по сопротивлению током.
В измерительной технике требуются реостатные преобразователи как с линейной так и с нелинейной функцией преобразования. Одним из способов построения преобразователей с нелинейной функцией преобразования является использование каркаса с переменной непрерывно меняющейся высотой. Изготовление такого каркаса более сложно, чем изготовление каркаса с постоянной высотой, Для упрощения технологии прибегают к кусочно-линейной аппроксимации нелинейной функции преобразования. Для каждого интервала перемещения движка Ax, на котором аппроксимирующая функция линейна, высота каркаса постоянна. Каркас преобразователя получается ступенчатым, число ступеней равно числу интервалов кусочно-линейной аппроксимации (рисунок 1.2)

Рисунок 1.1 Схема реостатного преобразователя.
R-омическое сопротивление;
h-перемещение движка.

Рисунок 1.2 Зависимость сопротивления от переменной высоты каркаса реостатного преобразователя

Рисунок 1.3 Схема потенциометра R-сопротивление;
h - перемещение движка; Rn – сопротивление нагрузки;
H – сопротивление; i – перемещение движка.
Одним из примеров реостатного преобразователя является потенциометр (рисунок 1.3). Напряжение с движка потенциометра подается на нагрузку. Учитывая технологию изготовления потенциометры бывают проволочные и проводниковые. Источником питания могут служить как переменный так и постоянный ток.
Достоинства и недостатки реостатных преобразователей.
Реостатные преобразователи обладают большой чувствительностью, возможностью работы без усиления и отсутствием реакции электрической части на механическую.
К недостаткам следует отнести непостоянство контакта между движком и резистором. При измерении переменных величин, при переходе движка с одного витка на другой он "подскакивает", возникает пульсирующая сила, которая может нарушить контакт. Это погрешность дискретности, обусловленная скачкообразным изменением сопротивления АЛ при переходе движка.
Для перемещения контакта по резистору необходима сравнительно большая сила. Поэтому в реостатном преобразователе возникает сила трения, которая вызывает случайные гистерезисные изменения силы и момента, необходимых для перемещения движка по обмотке. При этом может возникнуть погрешность системы, предшествующейпреобразователю. Сила трения увеличивает износ обмотки и контактирующей поверхности движка. Погрешность потенциометра при съеме информации с ГСОиН составляет 30'.
Емкостной метод, конденсаторы.
Известно, что емкость С конденсатора зависит:
 (1.2) (1.2)
где
е-
диэлектрическая постоянная диэлектрика;
d-расстояние между электродами;
В частности емкость плоского конденсатора с двумя электродами определяется выражением:
 (1.3) (1.3)
мессбауэр самолет навигация гироскопическая система
Изменение емкости С
конденсатора согласно формуле (1.2) можно осуществить путем изменения расстояния d
между электродами, эффективной площади S
электродов и диэлектрической постоянной s диэлектрика. Для измерения неэлектрических величин можно использовать также изменения диэлектрических потерь в конденсаторе.
В простейшем случае емкостной преобразователь состоит из двух параллельных пластин, разделенных воздушным диэлектриком, причем перемещение одной из пластин вызывает изменение емкости конденсатора. На (рисунок 1.4) показано принципиальное устройство емкостного преобразователя. На (рисунок 1.5) показан емкостной преобразователь в котором между двух неподвижных электродов перемещается подвижный диэлектрик. Так как изменение емкости конденсатора является однозначной функцией перемещения, то по изменению емкости можно судить о величине перемещения.

Рисунок 1.4 Схема емкостного преобразователя
Е – неподвижный электрод; в – подвижный электрод

Рисунок 1.5 Схема емкостного преобразователя с подвижным диэлектриком.
E, в – неподвижные электроды; L–подвижный диэлектрик;
h – перемещение диэлектрика.
Для увеличения чувствительности емкостного датчика следует уменьшать зазор между пластинами, однако при этом возможно замыкание пластин. Но если заполнить часть зазора диэлектриком с большой диэлектрической постоянной, чувствительность датчика возрастет и при тех же перемещения подвижной пластины можно будет получить значительно большее изменение емкости.
Емкостные датчики обладают малой мощностью, особенно на низких частотах. Обычно емкость датчика составляет С=100-300 мкмкф,
а изменение не превышает 10% от общей емкости. Если, например, к емкостному датчику с С=100мкмкф
приложено напряжение u
=5в
частотой  =400 гц,
то мощность Р
датчика равна: =400 гц,
то мощность Р
датчика равна:
 ва ва
Так как мощность измерителя должна быть во много раз меньше мощности датчика, то такой измеритель должен обладать высокой чувствительностью, но это не вполне возможно, поэтому емкостные датчики, как правило, работают на повышенных частотах и с применением усилителей. Для преобразования изменения емкости в соответствующее изменение силы тока, напряжения или частоты применяются различные электрические схемы: резонансные, мостовые, электростатические.
В резонансных схемах емкость датчика является элементом резонансного контура и изменение емкости вызывает изменение резонансной частоты, что в результате приводит к изменению частоты или амплитуды тока, протекающего по контуру. К числу преимуществ резонансных схем следует отнести высокую чувствительность и линейную зависимость выходной электрической величины и емкости. Однако в этих схемах трудно получить постоянную настройку, и следовательно, трудно обеспечить постоянство нуля прибора.
В мостовых схемах емкость датчика включается в одно или два плеча и служит переменным элементом моста, Недостатком мостовых схем для преобразования емкости является трудность достижения равновесия моста из-за несинусоидального питающего напряжения и неточного выполнения условий равновесия.
В электростатических схемах переменная емкость датчика используется для модуляции постоянного напряжения. Падение напряжения на переменной емкостиподается на сетку усилительной лампы с большим входным сопротивлением. Подобные схемы удовлетворительно работают только при измерении быстро изменяющихся неэлектрических величин.
Достоинства и недостатки емкостных преобразователей.
Емкостные преобразователи имеют ряд преимуществ: высокую чувствительность, возможность измерения как весьма малых, так и больших перемещений и деформаций, большую точность. К недостаткам следует отнести необходимость применять для питания схем ток повышенной частоты и усилители, а так же погрешности от паразитных емкостей, посторонних электрических полей. Погрешность емкостного преобразователя при съеме информации с ГСОиН 5.
Индуктивный метод, индуктивные преобразователи.
В электрических методах измерения, основанных на измерении индуктивности L, используется свойство катушки изменять свое реактивное (индуктивное) сопротивление при изменении некоторых ее параметров, определяющих величину индуктивности. Для получения возможно большой индуктивности катушка малых габаритов выполняется с сердечником из ферромагнитного материала.
Выражение для определения индуктивности такой катушки имеет вид:

где  -
число витков катушки; -
число витков катушки;
L0, S0 - величина и площадь воздушного зазора;
L1, S1 - длина средней линии и площадь сечения сердечника;
 - соответственно магнитная проницаемость воздуха и материала сердечника; - соответственно магнитная проницаемость воздуха и материала сердечника;
Изменение индуктивности L
согласно (1.4) можно осуществлять путем изменения числа витков, длины L0 или площади S0воздушного зазора и длины L1,площади S
1
или магнитной проницаемости  сердечника. В применяемых индуктивных датчиках изменение индуктивности достигается посредством изменения величины или площади воздушного зазора. сердечника. В применяемых индуктивных датчиках изменение индуктивности достигается посредством изменения величины или площади воздушного зазора.
Если катушка, индуктивность которой изменяется пропорционально измеряемой неэлектрической величине, включена в электрическую цепь, го по изменению силы тока в цепи или напряжения на клеммах прибора можно судить об этой величине.
При применении индуктивных преобразователей для измерения медленно меняющихся величин для их питания можно обойтись переменным током промышленной частоты. При измерении индуктивными преобразователями величин, изменяющихся с высокой частотой, необходимо выполнить два условия: 1) частота тока питающего преобразователь, должна быть в несколько раз выше частоты изменения измеряемой величины, 2) собственные частоты элементов (обычно якорей дои мембран), служащих для преобразования измеряемой неэлектрической величины в изменение индуктивности, должны быть значительно выше наивысшей частоты измеряемой величины. Принципиальная схема индуктивного преобразователя представлена на (рисунке 1.6). На железном сердечнике 1 намотана катушка 2. Если изменить воздушный зазор q посредством перемещения якоря 3, то коэффициент самоиндукции L катушки 2 будет изменяться, вследствие чего сила тока i, протекающего по катушке, так же будет изменяться. Таким образом, каждому значению перемещения h и величины зазора q будет соответствовать определенное значение коэффициента самоиндукции L, а следовательно и определенное значение силы тока i.
Для преобразования изменения индуктивности датчика в изменение силы тока, напряжения или частоты имеется ряд схем, которые можно разделить на резонансные, нерезонансные недифференциальные и дифференциальные.

Рисунок 1.6 Схема индуктивного преобразователя
1 – сердечник; 2 – катушка; 3 – якорь; q – воздушный зазор; i – сила тока;L–коэффициент самоиндукции; h – перемещение якоря.
Достоинства и недостатки индуктивных преобразователей.
При выборе частоты питающего напряжения исходят из следующих соображений. Для уменьшения динамических погрешностей эта частота должна быть в 8-10 раз больше частоты измеряемой величины. Поскольку реактивное сопротивление датчика пропорционально частоте, то с повышением частоты увеличивается чувствительностьдатчика, но одновременно возрастают потери на гистерезис и вихревые токи и усиливается поверхностный эффект. Следовательно, имеется некоторое оптимальное значение частоты питающего напряжения, в пределах 600-800 гц и больше.
Использование повышенной частоты переменного питающего напряжения приводят к уменьшению веса и габаритов при этих преобразованиях. Недостатком индуктивных преобразователей является наличие гальванической связи между питающим напряжением и сигналом на выходе. Для уменьшения погрешности преобразователи включаются по дифференциальным схемам.
При определении магнитодвижущей силы (м.д.с.) катушки следует исходить из требований малой реакции электрической части датчика на его механическую часть и из малой реакции указателя на датчик (при заданной мощности указателя). Эта сила должна быть во много раз меньше измеряемого усиления, действующего на якорь, так как в противном случае появляются большие погрешности. Для устранения реакции указателя на датчик мощность датчика должна быть в 10-15 раз больше мощности указателя. [1.1]
Сельсины
Индуктивный преобразователь поворотный или вращающийся. При помощи сельсина сигнал курса снимается с вала гироскопа при измерении угла поворота. Сельсин состоит из двух частей: ротора и статора. Ротор жестко закреплен на измерительной оси гироскопа, а другая- статор может приводиться во вращение относительно корпуса прибора двигателем через редуктор с электромагнитной муфтой. Обычно, при измерении величин с помощью сельсинов используют пару преобразователей: сельсин- датчик и сельсин-приемник, которые электрически связаны между собой и при повороте ротора сельсин датчика синфазно и синхронно с ним поворачивается ротор сельсин приемника. Схема сельсина представлена на (рисунок 1.7). Погрешность сельсина при съеме информации с ГСОиН составляет 6-8.

Рисунок 1.7
1 – статор сельсина; 2 – ротор сельсина; 3 – ось гироскопа.
Импульсины, индуктосины.
Индукционные, цифровые преобразователи, имеющие ряд преимуществ перед емкостными, так как последние в значительной степени подвержены влиянию паразитных емкостей и посторонних электрический полей. Погрешность съема информации с ГСОиН составляет 1. Но при такой высокой точности измерения преобразователи имеют некоторые недостатки: очень дороги и сложны в изготовлении, достаточно сложны в настройке и поэтому не получают широкого распространения.
Скт, Сквт.
Индукционный преобразователь представляющий собой две круговые обмотки, с разными диаметрами, расположенные одна в другой. Одна обмотка закреплена на оси прибора и вращается относительно другой обмотки под действием измеряемой величины. Погрешность СКТ, СКТВ при съеме информации с ГСОиН составляет З-6.
Оптические преобразователи.
Для съема информации с ГСОиН возможно использовать оптические датчики: фотодетекторы, фотодиоды, фотоэлектронные умножители. Но габариты, масса, сложность настройки создают неудобства в использовании. Погрешность оптических датчиков составляет 1.
Далее выясним, как погрешности метода съема информации с гироскопических систем ориентации и навигации влияют на собственные уходы (дрейф) гироскопа входящего в систему ориентации и навигации. Для этого опишем некоторые важные свойства гироскопа.
Основой гироскопической системы ориентации и навигации является гироскоп. Гироскопом называется устройство, предназначенное для измерения углов, угловых скоростей, ускорений и стабилизации различных объектов , принцип работы которого основан на использовании поворотных ускорений. В настоящее время наибольшее распространение получили гироприборы с быстро вращающимся ротором, поэтому гироскопом часто называют быстро вращающееся симметричное тело, имеющее две или три степени свободы. Необходимое число степеней свободы может быть реализовано благодаря применению специальных подвесов. Основой подавляющего большинствасовременных гироскопических приборов является гироскоп в кардановом подвесе (рисунок 1.8).

Рис.1.8 Схема гироскопа в кардановом подвесе
Мг – гироскопический момент,
Н – кинетический момент,
- переносная угловая скорость.
Кардановый подвес представляет собой две рамки со взаимно перпендикулярными осями вращения. Существует так же электростатический и магнитный подвес. Ось oZ, вокруг которой вращается ротор, называют главной осью гироскопа. Обычно стремятся, что бы оси oY, oX, oZ пересекались в одной точке. Если центр тяжести гироскопа совпадает с этой точкой, то он является астатическим,
в противном случае гиромаятником или тяжелым гироскопом. При сложном движении диска относительно оси оХ будет возникать момент от инерционных сил Кориолиса, называющийся гироскопическим моментом Мг.
Поскольку гироскопический момент является моментом инерционным, возникшим в результате движения быстро вращающегося диска с переносной угловой скоростью со то, согласно принципу Даламбера, он должен уравновешивать противоположно направленный ему внешний момент Мв
т.е.

Угловая же скорость переносного вращения со есть результат действия внешнего момента Мв.
Движение быстро вращающегося тела с угловой скоростью со под действием приложенного внешнего момента Мв
называют прецессионным движением или прецессией. Когда диск совершает прецессионное движение, с угловой скоростью, вектор которой ш направлен под углом а к по отношению к вектору кинетического момента H
можно определить закон прецессии:
 (1.5)
(1.5)
где
- угловая скорость;
Мв -
внешний момент;
Н
- Кинетический момент;  -
угол между Н и -
угол между Н и
Прецессионное движение направлено на совмещение вектора кинетического момента (собственный момент количества движения гироскопа) с вектором внешнего момента по кратчайшему пути.
Кроме прецессионного движения существует другое движение, в процессе которого момент совершает работу, обеспечивающую увеличение энергии системы на величину энергии прецессии. Это дополнительное движение называется нутацией.
Таким образом если к гироскопу приложен внешний момент Мв,
то его главная ось совершает сложное движение, состоящее из прецессионного движения вокруг оси оХ, и наложенных на него дополнительных колебаний вокруг осей оХ и oY. Эти дополнительные движения главной оси гироскопа называют нутационными колебаниями или просто нутацией.
Параметрами нутационных колебаний в общем случае являются их частота и амплитуды:
 - частота нутации; (1.6) - частота нутации; (1.6)
 - амплитуды нутации; - амплитуды нутации;
При вращающемся  роторе роторе
определим параметры нутационных колебаний:
 - амплитуды нутации; - амплитуды нутации;
 - частота нутации; - частота нутации;
Наиболее обширную группу представляют инструментальные погрешности гироскопов. Инструментальные погрешности - это погрешности возникающие из-за недостаточной точности и качества изготовления и сборки отдельных элементов и узлов гироскопа, несовершенства материалов и т.д. Вследствие этого относительно осей подвеса гироскопа возникают различные вредные моменты, которые будут вызывать неопределенное угловое движение главной оси гироскопа.
 (1.7) (1.7)
Этодвижение часто называют вредными уходами, собственными уходами или дрейфом
гироскопа. Величина дрейфа гироскопа определяется следующим соотношением;
Где -сумма всех вредных моментов, действующих относительно неподвижной точки гироскопа; Н- величина кинетического момента; Сумму всех вредных моментов разобьем условно на наиболее характерные слагаемые:
-сумма всех вредных моментов, действующих относительно неподвижной точки гироскопа; Н- величина кинетического момента; Сумму всех вредных моментов разобьем условно на наиболее характерные слагаемые:
 (1.8)
(1.8)
где
Mm
-
моменты сухого трения в осях подвеса;
Мнб-
моменты от несбалансированности;
М
mn
-
моменты от устройств обеспечивающих подвод питания к гироскопу исъем сигналов;
М-
прочие неучтенные моменты;
Моменты сухого трения, создаваемые опорами подвеса гироскопа, - один из наиболее существенных факторов, вызывающих собственные уходы гироскопов. Приближенно предполагается, что моменты сухого трения не зависят от времени, угловой скорости, относительного перемещения, зависят от нагрузки на опору и меняют знак при изменении знака скорости относительно перемещения. В действительности, даже при сделанных допущениях характеристика момента трения не бывает симметричной, т.е. при изменении знака скорости относительно перемещения абсолютное значение момента трения не остается постоянным. Поэтому если даже полагать, что гироскоп установлен на объект, совершающий гармонические колебания, будет наблюдаться его односторонний уход.
Моменты от несбалансированности возникают в результате несовпадения центра тяжести гироскопа с его неподвижной точкой. Эти моменты также могут носить случайный характер. Например, вследствие наличия в реальных конструкциях зазоров центр тяжести не имеет строго определенных координат. Статическую балансировку принципиально возможно произвести лишь с точностью до момента трения в опорах, на которых она производится, что определяется равенством Мт-Мнб.
Моменты от устройств, обеспечивающих подвод питания к гироскопу и обеспечивающих съем сигналов, зависит от конструкции этих устройств, которая, в свою очередь, зависит от вида подводимой энергии. В приборах с электрическим питание они могут носить характер упругих моментов и моментов сухого трения и рассматривались выше.
К числу неучтенных моментов можно отнести реактивные моменты при разгоне и торможении ротора, моменты, возникающие от инерционных сил при вибрациях в неравно жестких конструкциях и т.д.
Необходимо упомянуть об уходах, возникающих за счет нутационных колебаний главной оси гироскопа, если она отклонена от перпендикуляра к плоскости наружной рамки. Причем скорость этого ухода тем больше, чем больше угол отклонения. Однако скорость этого ухода исчисляется сотыми долями градуса в час и учитывается только в прецизионных приборах.
Ранее было выяснено, что собственные уходы гироскопа определяются соотношением (1.7). Это соотношение эквивалентно прецессионным уравнениям. Следовательно, при действии суммы вредных моментов вокруг оси оХ внутренней рамки, согласно закону прецессии, главная ось гироскопа начнет поворачиваться (прецессироватъ) с угловой скоростью вокруг оси oY внешней рамки в сторону совмещения вектора Н с вектором Мвр
по кратчайшему пути. Если же момент Мвр будет приложен вокруг оси внешней рамки, то аналогичное движение будет совершать внутренняя рамка:
 (1.9) (1.9)
где
 -
угловая скорость прецессии дрейфа; -
угловая скорость прецессии дрейфа;
Мвр-
вредные моменты; Н
- кинетический момент.
Угол отклонения главной оси гироскопа при этом определяется интегрированием угловой скорости прецессии:
 (1.10) (1.10)
где
 угол отклонения главной оси гироскопа при дрейфе.
угол отклонения главной оси гироскопа при дрейфе.
Гироскоп сохраняет неизменной ориентацию своей главной оси впространстве с точностью до вредных уходов. Значит текущее значение путевого угла вычисляется по формуле:
 (1.11)
(1.11)
где ПУтек.-
текущее значение путевого угла;
Пуист.-
истинное значение путевого угла (курс); у-
погрешность измерения путевого угла.
Из этого видно, что уменьшение свободных уходов или дрейфа гироскопа возможно за счет уменьшения вредных моментов, за счет применения опор с малыми моментами трения, без моментных устройств подвода питания и высокоточных устройств съема сигналов.
[1.2]
1.2.Эффект Мессбауэра, анализ возможностей применения эффекта Мессбауэра для измерения малых расстояний, скоростей и углов
В 1958 г немецкий физик Рудольф Мессбауэр обнаружил в спектре у-излучения ядер, находящихся в кристаллической решетке, несмещенную линию естественной ширины Г (линию без отдачи). Наличие аналогичной линии в спектре поглощения естественным образом привело к тому, что в кристаллической мишени, содержащей те же ядра, но в основном состоянии, легко могли быть реализованы условия, при которых поглощение у-квантов носило преимущественно резонансный характер. При этом очевидно, что низколежащим возбужденным уровням ядер (с энергией порядка десятков кэв
), для которых характерно большое время жизни, должен соответствовать чрезвычайно острый резонанс шириной близкой к 2Г. Таким образом, возникла возможность получения очень узких линий и одновременно детектора с необычайно высокой разрешающей способностью, характеризуемой отношением Г7Е (Е-энергия  -кванта). -кванта).
Сущность эффекта Мессбауэра заключается в том, что между радиоактивным изотопом (излучателем) и мишенью (поглотителем), выполненных из ядер одного и того же рода, будет происходить резонансное поглощение -квантов. Пусть ядро массы М испускает - квант с энергией Е. При этом ядро получает импульсотдачи равный
 (1.12) (1.12)
где
n
- единичный вектор в направлении распространения - кванта.
Если ядро свободно и первоначально покоится, то энергия -кванта уменьшается на величину энергии отдачи:
 (1.13) (1.13)
где
Е-энергия -кванта;М – масса ядра.
Для резонансного поглощения покоящимся ядром, необходимо, чтобы энергия -квант превосходила энергию возбужденного состояния на величину R. Таким образом, линия поглощения и линия испускания для первоначально покоящихся свободных ядер разделены энергетическим интервалом 2R. Хотя эта величина и мала по сравнению с Е, тем не менее она значительно превосходит ширину уровня Г, и поэтому резонансное поглощение становится невозможным. Компенсировать энергетический сдвиг 2R между линиями испускания и поглощения можно за счет эффекта Допил ера, если заставить излучающее и поглощающее ядра двигаться с относительной скоростью v, определяемой соотношением

Все экспериментальные методы исследования резонансного поглощения -квантов до открытия эффекта Мессбауэра основывались на компенсации энергии отдачи за счет доплеровского смещения (или уши рения) линии.
Однако вследствие большой величины скорости v
эти методы были мало эффективны, и очень заманчивое резонансное поглощение, соответствующее долгоживущим ядерным уровням, могло быть использовано только для узкого круга чисто ядерных задач.
Включение атомов излучателя и поглотителя в кристаллическую решетку позволило избежать потери энергии - квантов, поскольку отдача в этом случае воспринимается не отдельным атомом, а всей решеткой в целом. Если излучающее или поглощающее ядро находится в кристаллической решетке, возникает картина, принципиально отличающаяся от предыдущей. Кристалл представляет собой систему N упруго связанных материальных точек. Колебания атомов в кристаллической решетке не являются независимыми, смещение одного атома ведет за собой смещение соседних. Все возбуждения в кристалле не сопровождающиеся локальным разрушением решетки, являются коллективными и в общем случае охватывают веськристалл (рисунок 1.9), и при низкой температуре существует значительная вероятность того, что при поглощении или испускании у -кванта отдача будет передана всему кристаллу, т.е. испускание или поглощение будут происходить без рождения фононов в кристалле и по существу без потери энергии на отдачу. Если энергия отдачи как при испускании, так и при поглощении -квантов распределяется примерно между  атомами, то недостаток энергии 2R будет мал по сравнению с обычной шириной ядерных уровней. атомами, то недостаток энергии 2R будет мал по сравнению с обычной шириной ядерных уровней.

Рис 1.9 Схема внедрения ядра в Кристаллическую решетку
Импульс отдачи (1.12), который неизбежно приобретается ядром, приводит к возбуждению фононов в кристалле. При этом импульс фонона (или суммарный импульс фононов) не должен в общем случае совпадать с (1.12), так как часть импульса может быть передана кристаллу как целому. Такая передача импульса в силу большой массы кристалла, очевидно, не сопровождается передачей энергии. Следовательно, передаваемая кристаллу энергия АЕ при распаде перестает коррелировать с передаваемым импульсом и может быть произвольной. В частности, АЕ может равняться нулю, и весь импульс отдачи (1.12) передается кристаллу как целому. (Заметим, что утверждение, согласно которому АЕ-0 всякий раз, когда импульс отдачи воспринимает весь кристалл, в общем случае не верно.) При этом линия излучения (поглощения) оказывается несмещенной, и мы приходим к эффекту Мессбауэра. При этом относительная ширина резонансных линий поглощения чрезвычайно узкая (порядка ) (рисунок 1.10), что позволяет рассматривать измерительную схему на основе эффекта Мессбауэра как резонансный контур с невиданной добротностью. Ясно, что несмещенная линия для ядер в кристалле будет существовав всегда; вопрос состоит только в том, какова ее интенсивность, т.е. какова относительная вероятность не возбуждения фононов, когда одно из ядер получает импульс, определяемый формулой (1.12). Вероятность возбуждения фонона с частотой о при Т-0 зависит от отношения ) (рисунок 1.10), что позволяет рассматривать измерительную схему на основе эффекта Мессбауэра как резонансный контур с невиданной добротностью. Ясно, что несмещенная линия для ядер в кристалле будет существовав всегда; вопрос состоит только в том, какова ее интенсивность, т.е. какова относительная вероятность не возбуждения фононов, когда одно из ядер получает импульс, определяемый формулой (1.12). Вероятность возбуждения фонона с частотой о при Т-0 зависит от отношения  и увеличивается с ростом последнего. Если это отношение для характерной для кристалла области частот не превышает значительно 1, то при Т-0 будет существовать заметный эффект Мессбауэра. Однако с повышением температуры вероятность эффекта должна непрерывно падать. Действительно фононы являются бозе-частицами, поэтому переходы для них носят индуцированный характер. Иными словами вероятность возбуждения фонона тем больше, чем больше фононов данного сорта присутствует в системе. С повышением температуры число фононов непрерывно возрастает в соответствии с обычным выражением для равновесного распределения и увеличивается с ростом последнего. Если это отношение для характерной для кристалла области частот не превышает значительно 1, то при Т-0 будет существовать заметный эффект Мессбауэра. Однако с повышением температуры вероятность эффекта должна непрерывно падать. Действительно фононы являются бозе-частицами, поэтому переходы для них носят индуцированный характер. Иными словами вероятность возбуждения фонона тем больше, чем больше фононов данного сорта присутствует в системе. С повышением температуры число фононов непрерывно возрастает в соответствии с обычным выражением для равновесного распределения

В результате увеличивается вероятность возбуждения фотонапри отдаче и, следовательно, уменьшается вероятность эффекта Мессбауэра f.

Рисунок 1.10 Сравнение резонансных кривых
1 – резонансная кривая для эффекта Мессбауэра;
2 – резонансная кривая с доплеровским уширением.
Следует подчеркнуть, что наличие несмещенной линии излучения (поглощения) не является исключительной привилегией регулярных кристаллов. Принципиально эффект Мессбауэра должен иметь место в любой макроскопической системе взаимодействующих частиц. Действительно, приведенные выше соображения относительно нарушения корреляции между переданными импульсом и энергией целиком переносятся на любую макроскопическую систему. В частности, это относится к аморфным телам и жидкостям. Однако вероятность эффекта очень сильно зависит от особенностей системы. Так, существенное уменьшение вероятности эффекта f будет возникать всякий раз, когда в системе сохраняются индивидуальные степени свободы, например незаторможенное вращение в твердых телах, перемещение молекул в жидкости и т.п.
Эффект Мессбауэра будет иметь место и для малых ансамблей частиц, если центр тяжести такого ансамбля принудительно зафиксирован. Более того эффект может существовать и для отдельных частиц, если они находятся в потенциальной яме. Для указанных систем характерны локализированные возбужденные состояния. Аморфные тела, очевидно, так же примыкают к подобным системам. Характер зависимости вероятности эффекта Мессбауэра от температуры для такого рода систем качественно мало отличается от случая регулярного кристалла.
Таким образом, появление несмещенной линии излучения (поглощения) -квантов в случае низколежащих ядерных уровней в принципе следует ожидать для довольно широкого класса систем. Если относительная интенсивность линии Мессбауэра не слишком мала, то при благоприятных условиях резонансное поглощение можно обнаружить экспериментально во всех случаях.
Узость несмещенной линии при большой величине энергии -кванта позволяет легко нарушить условие резонанса. Если в формуле для v заменить R на Г, то из нее нетрудно заключить, что для нарушения условий резонанса необходимы ничтожные относительные скорости источника и поглотителя. Так в случае Sn119, принимая во внимание найденное раньше отношение Г/R~10-5, получаем для v значение порядка мм/сек .
Заметим, что чем выше разрешающая способность, тем меньшиезначения скорости нарушают резонанс.
Эффект Мессбауэра на различных изотопах.
Эффект Мессбауэра был обнаружен на различных изотопах. Две основополагающие работы Мессбауэра подробно описывают открытие и исследование эффекта резонансного поглощения без отдачи на ядрах изотопа Ir191 с энергией возбужденного состояния 129 кэв
( сек).
Так же был обнаружен эффект на изотопе железа Fe57 (Е=14.4 кэв
и сек).
Так же был обнаружен эффект на изотопе железа Fe57 (Е=14.4 кэв
и  сек
) Малая энергия отдачи и одновременно большая разрешающая способность (Г/Е сек
) Малая энергия отдачи и одновременно большая разрешающая способность (Г/Е )сделали этот изотоп наиболее часто использующимся в исследованиях, связанных с эффектом Мессбауэра. Изотоп Fe57 обладает высокой разрешающей способностью и малой энергией отдачи. Кроме того, малая энергия -лучей и высокая дебаевская температура железа позволяет получит для Fe57 значение вероятности эффекта 0,8 даже при комнатной температуре. Поэтому нет необходимости в охлаждении. Частотные смещения могут быть вызваны разностью температур источника и поглотителя. За время испускания (поглощения), равное для Fe57KFc, среднее значение скорости связанного ядра хорошо определяется и будет происходить лишь пренебрежимо малое уширение. Ненулевое значение скорости приводит к относительному изменению частоты, что связано с релятивистским эффектом Доплера, а это значит, что частота испускания(поглощения) должны меняться с температурой. При 300°К можно получить изменение частоты 2-10-15 на 1°С. При расположении источника и поглотителя на расстоянии L<10 см такого температурного изменения не произойдет. Широкая линия Fe57 (относительно Zn67) дает преимущество и в том, что при малых по сравнению с шириной линии вибрациях они за счет усреднения исключаются из результатов измерений за длительное время. Небольшие постоянные сдвиги могут быть измерены в присутствии больших вибраций. При малых и практически равных массах приемной и передающей частей относительное колебание пренебрежимо мало Общее их движение при усреднении стремиться к нулю. )сделали этот изотоп наиболее часто использующимся в исследованиях, связанных с эффектом Мессбауэра. Изотоп Fe57 обладает высокой разрешающей способностью и малой энергией отдачи. Кроме того, малая энергия -лучей и высокая дебаевская температура железа позволяет получит для Fe57 значение вероятности эффекта 0,8 даже при комнатной температуре. Поэтому нет необходимости в охлаждении. Частотные смещения могут быть вызваны разностью температур источника и поглотителя. За время испускания (поглощения), равное для Fe57KFc, среднее значение скорости связанного ядра хорошо определяется и будет происходить лишь пренебрежимо малое уширение. Ненулевое значение скорости приводит к относительному изменению частоты, что связано с релятивистским эффектом Доплера, а это значит, что частота испускания(поглощения) должны меняться с температурой. При 300°К можно получить изменение частоты 2-10-15 на 1°С. При расположении источника и поглотителя на расстоянии L<10 см такого температурного изменения не произойдет. Широкая линия Fe57 (относительно Zn67) дает преимущество и в том, что при малых по сравнению с шириной линии вибрациях они за счет усреднения исключаются из результатов измерений за длительное время. Небольшие постоянные сдвиги могут быть измерены в присутствии больших вибраций. При малых и практически равных массах приемной и передающей частей относительное колебание пренебрежимо мало Общее их движение при усреднении стремиться к нулю.
Широкое применение, особенно в последнее время, получил так же изотоп

Для особо прецезионных измерений смещений линии специальный интереспредставляет изотоп Zn
61(
E
=92 кэв ,
 =9.4-10-6 сек
) с рекордным значением Г/Е =9.4-10-6 сек
) с рекордным значением Г/Е  5*10-16. Однако измерение эффекта Мессбауэра на этом изотопе проводить исключительно трудно из-за малой величины вероятности эффекта и чрезвычайной узости линии. (Последнее приводит к тому, что механические колебания со скоростью всего 10-5см/сек
нарушают условия резонанса). Резонансное поглощение без отдачи наблюдали используя в качестве источника и поглотителя окись цинка ZnO, которая обладает существенно более большим значением эффекта по сравнению с металлическим цинком, но в ZnO наблюдаемая величина линии Мессбауэра не сильно отличается от естественной. 5*10-16. Однако измерение эффекта Мессбауэра на этом изотопе проводить исключительно трудно из-за малой величины вероятности эффекта и чрезвычайной узости линии. (Последнее приводит к тому, что механические колебания со скоростью всего 10-5см/сек
нарушают условия резонанса). Резонансное поглощение без отдачи наблюдали используя в качестве источника и поглотителя окись цинка ZnO, которая обладает существенно более большим значением эффекта по сравнению с металлическим цинком, но в ZnO наблюдаемая величина линии Мессбауэра не сильно отличается от естественной.
Существование эффекта резонансного поглощения без отдачи был обнаружен на редкоземельных элементах, эффект наблюдался на изотопе Dy161 ( Е=26 кэв,  сек
), причем в качестве поглотителя использовались окись Dyi Оз. Однако не удалось разрешить сверхтонкую структуру, и ширина резонансной линии оказалась в 100 раз больше естественной. сек
), причем в качестве поглотителя использовались окись Dyi Оз. Однако не удалось разрешить сверхтонкую структуру, и ширина резонансной линии оказалась в 100 раз больше естественной.
Помимо этого, имеется еще ряд сообщений об обнаружении эффекта Мессбауэра на других изотопах: Ег166( Е=80.6 кэв,  ), Iг193( Е=73 кэв, ), Iг193( Е=73 кэв,  ), W183(E=99.1 кэв, т!/2 -5.7-10-10), W182 (Е=100 кэв, ), W183(E=99.1 кэв, т!/2 -5.7-10-10), W182 (Е=100 кэв,  ), W183 (Е=46.5 кэв, ), W183 (Е=46.5 кэв, ), Те125(Е=35.5 кэв, ), Те125(Е=35.5 кэв,
 ), Тm169 (Е=8.42 кэв, ), Тm169 (Е=8.42 кэв,  ), Yb170 (Е-84 кэв, ), Ni (Е=71 кэе, ), Yb170 (Е-84 кэв, ), Ni (Е=71 кэе,  сек),
Sm149 (Е=22
кэв. сек),
Sm149 (Е=22
кэв.  сек). сек).
Вработах Мессбауэра, как и в большинстве последующих работ, эффект изучался с помощью опытов по пропусканию -квантов через резонансно поглощающие мишени. При этом измерялось уменьшение общей интенсивности излучения по сравнению со случаем нерезонансного поглощения (большие скорости источника относительно поглотителя или высокие температуры). Однако принципиально гораздо большей экспериментальной чувствительностью должны обладать опыты по резонансному рассеянию -лучей. В оптимальных условиях в таких опытах может быть существенно уменьшен фон нерезонансного рассеяния, в результате чего становится доступным измерение очень малых величин интенсивностей. Независимо большой интерес представляет анализ угловогораспределения резонансного рассеянного излучения, позволяющий получать важную информацию о сверхтонкой структуре. Резонансное рассеяние - квантов без отдачи впервые наблюдали для Sn119,позднее исследовалась форма линии резонансного рассеяния для Fe57 .
Во многих случаях распад, соответствующий низколежащим возбужденным уровням, сопровождается внутренней конверсией, причем коэффициент конверсии а имеет заметную величину. Это открывает интересные экспериментальные возможности регистрации эффекта Мессбауэра по электронам конверсии и характеристическому рентгеновскому излучению, сопровождающему внутреннюю конверсию.
Также анализируется возможность наблюдения эффекта Мессбауэра для сверх узких линий изотопов серебра Ag107 и Ag109 . Этим изотопам соответствуют порядка 1 мин .
Большой интерес представляет так же рассмотрение вероятности резонансного излучения (поглощения) - квантов в случае, когда излучателем является чужое по отношению к основной решетке ядро. Аномальная температурная зависимость вероятности эффекта Мессбауэра в случае, когда излучателем является тяжелое ядро, а остальные ядра в элементарной ячейке легкие, была обнаружена SnOi(излучатель Sn119) и Dy2O3 (излучатель Dy161). В них эффект существует при высоких температурах и снижение его с ростом температуры происходит медленно. Для Dy2O3 заметный эффект наблюдался при 1000° К. Аналогичным был результат, когда легкое ядро Fe57 внедрялось в тяжелую матрицу In. Величина эффекта при большом различии масс атомов излучателя и матрицы, температурная зависимость эффекта, возможность наблюдения эффекта для легкого излучателя или при заметной энергии отдачи, а также для кристалла с низкой температурой Дебая - все эти проблемы играют существенную роль в самых разнообразных задачах, связанных с применением эффекта Мессбауэра.
Теория эффекта Мессбауэра.
Если при излучении (или рассеянии) ядро / системы получает импульс p
=
hk
,
то нормированная на единицу вероятности перехода системы из состояния i в состояние f определяется квадратом матричного элемента:
 (1.14) (1.14)
L- ядро системы;
Р-импульс;
i,f-состояния.
При этом эффекту Мессбауэра соответствует переход без изменения состояния системы f=i, а так же переходы с изменением состояния системы, но без изменения ее энергии. Если спектр системы состоит из квазинепрерывных полос, ширина которых много больше Г, то, как можно показать, вероятность эффекта практически определяется вероятностью перехода без изменения состояния системы. Для регулярных кристаллов мы будем предполагать, что реализуется именно эта ситуация. Заметим, что при наличии дискретных уровней картина меняется и при их вырождении необходимо учитывать переходы типа испускания и поглощения квантов одинаковой энергии, но принадлежащих различным расстояниям. Рассмотрим регулярную решетку произвольной симметрии с произвольным числом атомов в элементарной ячейке;
 (1.15) (1.15)
где
 и и  -
соответственно равновесное положение и смещение j-ro атома в элементарной ячейке п. -
соответственно равновесное положение и смещение j-ro атома в элементарной ячейке п.
Для можно написать следующее общее выражение:
 (1.16) (1.16)
Причем комплексные амплитуды vj - ортонормированны условиям (верхние индексы-декартовы координаты)


где
f, - волновой вектор и частота фонона, - волновой вектор и частота фонона,
 - номер ветви, - номер ветви,
а
и а+ -
соответственно операторы поглощения и рождения фонона,
N
-
число элементарных ячеек в кристалле,
М
j
масса атома j.
В силу трансляционной симметрии матричный элемент (1.14) будет зависеть только от j. Не теряя общности, положим n=0. Учитывая (1.16) представим экспоненту в (1.14) в виде произведения экспонент, соответствующих отдельным нормальным колебаниям. Разложим эти экспоненты в ряд, ограничиваясь первыми тремя членами (остальные дают вклад стремящейся к нулю, при N стремящейся к бесконечности). Принимая во внимание независимость отдельных осцилляторов и характеризуя состояние кристалла совокупностью чисел заполнения фононов, для процесса с участием s фононов, находим (после усреднения по начальному равновесному распределению):
 (1.17) (1.17)
Причем
Или переходя от суммирования к интегрированию по фазовому объему:
 (1.28) (1.28)
Здесь rj- энергия отдачи для изолированного ядра j

где
q- единичный вектор в направление вылета у-кванта,
n
- равновесное значение числа фононов,
U0 -объем элементарной ячейки.
Верхний знак в квадратных скобках в (1.17) отвечает испусканию фонона, нижний-поглощению.
Вероятность излучения (поглощения) - кванта ядром типа j
без изменения состояния кристалла в соответствии с (1.17) определяется выражением:
 (1.19) (1.19)
Выражения (1.18) и (1.19) описывают вероятность эффекта Мессбауэра для общего случая регулярной кристаллической решетки, когда излучателем является один из атомов в элементарной ячейке (атому) [1.3].
Открытие явления резонансного испускания и поглощения -квантов без отдачи части энергии ядру положило дорогу созданию высокочастотных измерительных устройств. При столь остром резонансе любое воздействие, приводящее к изменению частоты (энергии) гамма-квантов, неизбежно нарушает ядерный резонанс, обеспечивая чрезвычайную чувствительность и точность измерения. Эффект Мессбауэра может с успехом использовать для измерения угловых параметров, малых расстояний и скоростей движения : от сотых долей миллиметров в секунду до десятков сантиметров в секунду.
Определение скоростей и расстояний
- резонансным методом
.
Сложность непосредственного измерения малых скоростей приводит к поискамновых методов измерений. Разрешающая способность доплеровских измерителей скорости зависит от абсолютного значения измеряемой скорости:
гдеF
Д
- доплеровский сдвиг частот,
fn
-
частота передатчика.
При этом измерение малых скоростей ограничено конечным значением частоты модуляции. Использование эффекта Мессбауэра позволяет определить значения скоростей, недоступных для измерения радиотехническими методами.
Сущность эффекта Мессбауэра заключается в том, что источник и приемник резонансных квантов имеют одинаковые энергетические уровни и при отсутствии относительного движения в приемнике наблюдается резонансное поглощение у квантов. При относительном движении со скоростью Vr
энергия -квантов изменяется в связи с действием эффекта Доплера, что приводит к нарушению резонанса. Относительную скорость можно определить по изменению регистрируемой плотности потока резонансных у -квантов. Измерительные схемы, использующие данный эффект, обладают необычайно высокой добротностью за счет чрезвычайно узкой относительной ширины резонансных линий поглощения. На этом принципе основано использование -резонансного метода для измерения малых скоростей движения.
В общем случае для определения скоростей могут быть использованы три метода, позволяющие регистрировать эффект Мессбауэра:
- метод пропускания резонансных - квантов;
- метод регистрации электронов внутренней конверсии и рентгеновскогоизлучения;
- метод регистрации рассеянного резонансного излучения.
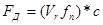
- Сущность первого метода заключается в следующем (рисунок 1.11).
Рисунок 1.11 Схема измерения скорости на основе эффекта Мессбауэра методом пропускания резонансных гамма-квантов при нулевой скорости относительного перемещения источника и детектора (а), и скорости отличной от нуля (б)
1- Источник,
2- поглотитель,
3- основной детектор,
4- дополнительный детектор,
5- регистратор.
Если перед источником резонансных -квантов расположить тонкий поглотитель с энергетическими уровнями возбуждения, аналогичными источнику, то в поглотителе будет наблюдаться резонансное поглощение -квантов. Если скорость относительного перемещения источника и детектора Vr
=0, то основной детектор 3(см. рисунок 1.11а) зарегистрирует минимальную скорость счета, а дополнительный детектор 4 будет фиксировать максимальное количество вторичных фотонов, образующихся при переходе ядер поглотителя в основное состояние после резонансного поглощения. При относительном движении источника и приемника условия резонанса нарушаются в результате доплеровского сдвига частот, равногоотносительному смещению по энергии  При этом скорость счета навыходе детектора 3 возрастает, а детектор 4 регистрирует минимальное количество - квантов (рисунок 1.11б). Зная зависимость скорости счета - квантов прошедших через поглотитель, от относительной скорости системы источник-поглотитель, можно определить скорость перемещения, которую можно записать: При этом скорость счета навыходе детектора 3 возрастает, а детектор 4 регистрирует минимальное количество - квантов (рисунок 1.11б). Зная зависимость скорости счета - квантов прошедших через поглотитель, от относительной скорости системы источник-поглотитель, можно определить скорость перемещения, которую можно записать:
 (1.20) (1.20)
гдеPnan
-
соответственно плотность и толщина поглотителя;
ар -
относительная доля резонансных квантов в спектре источника;
 - сечение резонансного поглощения; - сечение резонансного поглощения;
 - массовый коэффициент поглощения; - массовый коэффициент поглощения;
p
,р -
вероятность испускания и поглощения квантов без отдачи;
ns
,
nn
-
число атомов резонансного изотопа на см2
в источнике и поглотителе.
 
Г-
естественная ширина возбужденного уровня,
эВ.
ПриVr
=0наблюдается максимальное резонансное поглощение:

где  - скорость счета в отсутствии резонансных линий; - скорость счета в отсутствии резонансных линий;
 -
интенсивность резонансных линий; -
интенсивность резонансных линий;
 - эффективная толщина поглотителя - эффективная толщина поглотителя
 - функция Бесселя нулевого порядка. - функция Бесселя нулевого порядка.
Определить скорость движения можно при использовании резонансных детекторов, регистрирующих электроны внутренней конверсии и рентгеновское излучение. Если  - коэффициент конверсии, то в поглотителе при резонансном поглощении (1+
)
ядер распадается с испусканием - коэффициент конверсии, то в поглотителе при резонансном поглощении (1+
)
ядер распадается с испусканием  - квантов, а остальные (1+
)-1
ядер испускают электроны и рентгеновское излучение. Регистрируя последние с высокой эффективностью, а нерезонансное излучение- с низкой, можно существенно повысить резонансный эффект по сравнению с первым методом. В этом случае максимальная скорость счета будет равна: - квантов, а остальные (1+
)-1
ядер испускают электроны и рентгеновское излучение. Регистрируя последние с высокой эффективностью, а нерезонансное излучение- с низкой, можно существенно повысить резонансный эффект по сравнению с первым методом. В этом случае максимальная скорость счета будет равна:

Следовательно, важным преимуществом второго метода является то, что с уменьшением скорости относительного движения системы источник-поглотитель, т.е. с наступлением резонанса, значительно увеличивается скорость счета, что, в свою очередь, повышает чувствительность метода.
Различие в эффективности регистрации обеспечивается выбором соответствующих детекторов и селекции импульсов по амплитуде.
Метод регистрации рассеянного резонансного излучения является наиболее чувствительным. Он получил распространение в экспериментальных исследованиях с очень малым резонансным эффектом. Плотность потокарассеянных резонансных квантов будет равна:
 (1.22) (1.22)
гдеmi
-
число резонансных квантов на один распад;
mp
- число рассеянных резонансных квантов на один распад.
Если детектор хорошо коллимирован, то он будет регистрировать только рассеянное резонансное излучение, - кванты, возникающие в процессе комптоновского рассеяния, дискриминируются. Недостатком рассмотренного метода является использование больших активностей для получения равноточных измерений. Характеристикой измерителя скорости будет являться зависимость N
=
f
(
Vr
)
. Погрешностью измерения скорости можно найти следующим путем:
  (1.23) (1.23)

Следовательно, для оценки погрешностей необходимо вычислять интеграл (1.20). Если решение интеграла представить некоторой функцией F, то величина  может быть найдена по формуле: может быть найдена по формуле:
 (1.24) (1.24)
где
 - время измерении; - время измерении;
При практическом осуществлении методов измерений на основе эффектаМессбауэра очень большое значение приобретает выбор нуклида.
Чувствительность и точность метода обеспечивается достаточной шириной возбужденного уровня и интенсивностью резонансной линии. Необходимым является и выбор излучателя с приемлемым периодом полураспада и высокойудельной активностью по резонансной линии. И наконец, спектр источника не должен содержать интенсивных конкурирующих линий. В противном случае следует экранировать источник, что может привести к значительному увеличению массы всего устройства. Изотопы, наиболее удовлетворяющие этим требованиям, приведены в таблице 1.
Таблица 1. Характеристики некоторых нуклидов, на ядрах которых наблюдается эффект Месбауэра.
| Нуклиды
|
Еукэв
|
Гкэв
|
Vr
мм/сек
|
аоСМ2
|
Т1/2 |
| (1) |
(2) |
(3) |
(4) |
(5) |
(6) |
| 57Fe |
14.4 |
4. 167*10-12 |
0.194 |
2. 35*10-11 |
270дней |
| 119Sn |
23.9 |
2.46*10-11 |
0.623 |
1.32*10-18 |
250дней |
| 181Та |
6,25 |
6,71*10-14 |
0,006 |
1,7*10-18 |
145 дней |
| 151'Eu |
21.6 |
5.18*10-11 |
1.439 |
2. 33*10-19 |
150дней |
| 155Gd |
60.0 |
1.9*10-9 |
19.0 |
1.2*10-11 |
1.8 года |
| 191Pt |
67.0 |
1.38*10-11 |
0.124 |
6. 3*10-20 |
18 лег |
| 121Sb |
37.2 |
1.3*10-11 |
2.104 |
2. 37*10-10 |
5 лет |
| 159Tb |
58.0 |
3.5*10-9 |
36.28 |
9.83*10-11 |
144 дня |
Как видно из таблицы, наиболее узкой резонансной линией обладает 181Та. На его основе можно было бы создать сверхвысокочувствительную аппаратуру по измерению малых перемещений, вибраций, скоростей. Однако при обычных температурах удается наблюдать резонансную линию с интенсивностью 0,6% . Для целей измерительной техники наиболее перспективными являются нуклиды 57Fe и 119Sn. Резонансное поглощение на этих ядрах наблюдается при температурах -60 до +60° С с вероятностью 0,88 и 0,60.

Рисунок 1.12 Схема измерения скорости и расстояния. 1 – источник; 2 – поглотитель; 3 – детектор; 4 – предусилитель; 5 – импульсный дискриминатор; 6 – делитель; 7 – интегратор
Схема измерителя скорости и дальности, основанного на эффекте Мессбауэра приведена на рисунке 1.12. Источник одновременно с резонансными квантами испускает некоторое количество нерезонансных.
Количество нерезонансных квантов Фрез, достигающих детектора, зависит от относительного расстояния R
и скорости Vr
, в то время как поток нерезонансного излучения пропорционален только расстоянию:
 (1.25) (1.25)

где в1,в2
- постоянные.
Соответственно число импульсов составит:

 (1.26) (1.26)
гдеСд1, Сд2 - постоянные для каналов регистрации. Разделим первое уравнение выражения (1.26) на второе и проинтегрировав получим:
Импульсы Npe
з
и N
нерез
могут быть зарегистрированы одним детектором с использованием амплитудной селекции за счет различия уровней энергии резонансных и нерезонансных квантов.
Для измерения скорости двух объектов, находящихся на близком расстоянии, активность источника 57 Со (поглотитель 57Fe) должна составлять всего несколько милликюри. С увеличением измеряемой дальности возрастают активность источника и, следовательно, масса его защиты. С точки зрения массы защитынаиболее приемлемой является активность 40-50 мкюри, позволяющая с заданной точностью измерять расстояния до 30 метров. Чувствительность метода составляет около 0,01 см/сек при погрешности измерений, не превышающей несколько процентов.
Использование узкой резонансной области обеспечивает прекрасную разрешающую способность, но одновременно является и недостатком метода, так как при этом невозможно измерить скорость, превышающую 0,25-0,3 м/сек. При более высокой скорости доплеровский сдвиг частот приводит к выводу из резонансной области. Поэтому скорости, превышающие 0,3 м/сек, целесообразно измерять с помощью комплекса измерительных устройств. При Vr 1-5 м/сек для измерений применим радиотехнический метод, а при Vr 0.3-1 м/сек - поток нерезонансных -квантов, испускаемых источником. Чувствительность методов измерения расстояний и скоростей приведена в таблице 2. 1-5 м/сек для измерений применим радиотехнический метод, а при Vr 0.3-1 м/сек - поток нерезонансных -квантов, испускаемых источником. Чувствительность методов измерения расстояний и скоростей приведена в таблице 2.
Таблица 2. Чувствительность методов измерения параметров движения
| Метод |
Скорость м/сек |
Расстояние м |
| Мах |
Min |
Мах |
Min |
| Резонансный |
0.25-0.30 |
10-5 |
30-40 |
0 |
| Гамма-локатор (нерезонансный) |
Очень высокая |
0.1-0.2 |
Сотни метров |
0 |
| Радиотехническая |
Очень высокая |
0.3-1.0 |
Очень высокая |
30-100 |
Измерение угловых параметров.
При измерении угловых координат источника используют прямолинейность распространения - излучения. Для этого применяют различные устройства, коллимирующие его, чаще всего стационарные многоканальные приемники излучения (рисунке 1.13) информацию о направлении на источник получают уравнивая показатели детекторов при отклонении излучателя от осевой линии [1.4].
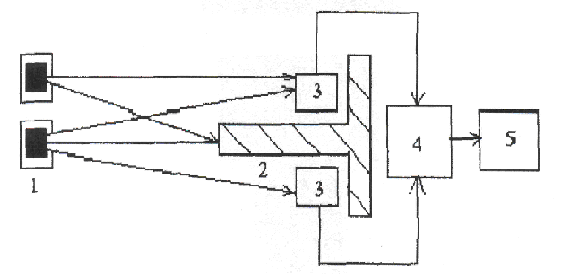
Рисунок 1.13 Схема измерения углов. 1 – излучатель; 2 – компилятор; 3 – приемник; 4 – преобразователь; 5 – измеритель
1.3 Разработка устройства съема информации с гироскопических систем ориентации и навигации на основе эффекта Мессбауэра
Разработку устройства съема информации с гироскопических систем ориентации и навигации будем осуществлять на основе (описанного ранее смотриподробней 1.2.) эффекта Мессбауэра. Для измерения угла отклонения источника и приемника друг относительно друга будем использовать (смотриподробней1.2.) метод пропускания резонансных - квантов. Сущность этого метода заключается в том, что если источник и приемник (детектор) - квантов имеют аналогичные энергетические уровни возбуждения, то в детекторе будет наблюдаться резонансное поглощение - квантов. Чувствительность резонансного метода (таблица 2.) обеспечивает высокую точность измерений при минимальном расстоянии (от нуля метров) между источником и детектором.
Функциональная схема устройства съема информации на основе эффекта Мессбауэра представлена на рисунке 1.14. Для измерения угловых координат возможно использование одного детектора (прямой метод), но для повышения точности информации о положении источника будем использовать два детектора (метод сравнения). Если относительное перемещение источника и детекторов равно нулю (рисунок 1.14) то детекторы зарегистрируют максимальную скорость счета - квантов, причем эта скорость для обоих детекторов будет одинаковой. При возникновении отклонения между источником и детекторами условия резонанса нарушаются и скорость счета у -квантов на входе детекторов резко снижается, и наблюдается непропорциональное поглощение - квантов в указанных детекторах (скорости счета на детекторах различны). Предполагаем, что такая ситуация возникает в результате того, что излучение от источника происходит не по Ламбертовской поверхности, т.е. в разных направлениях с одинаковой энергией (источник является направленным).
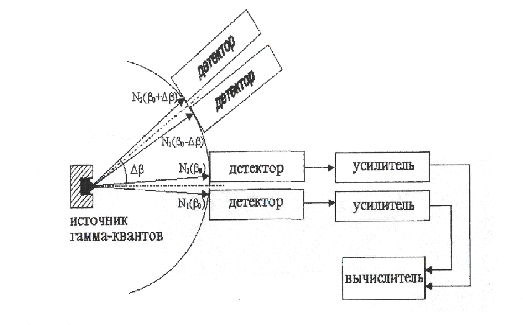
Рисунок 1.14 Функциональная схема устройства съема информации с ГСОиН на основе эффекта Мессбауэра
 максимальное значение скорости счета гамма-квантов при резонансном поглощение. максимальное значение скорости счета гамма-квантов при резонансном поглощение.
 значение скорости счета гамма-квантов при отклонении источника и приемника на значение скорости счета гамма-квантов при отклонении источника и приемника на  . .
Рассматриваемый принцип измерения угловых координат основан на амплитудном методе пеленгации. Опишем сначала прямой метод измерения, В этом случае, когда линия визирования на детектор проходит через максимум излучения, на приемнике фиксируется максимальный сигнал:
 (1.27) (1.27)
гдеk0 - коэффициент пропорциональности;
N(0)- максимальное значение скорости счета - квантов при нулевом значении угла ( ) )
При отклонении линии визирования от максимума излучения на угол Ар выходной сигнал равен:
 (1.28) (1.28)
Пеленгационная характеристика, полученная экспериментальным путем и показывающая зависимость скорости счета - квантов от угла отклонения источника и детектора, в общем случае может быть представлена в виде (рисунок 1.15).

Рисунок 1.15 пеленгационнаяхарактеристика.
Математически пеленгационную характеристику можно описать в следующем виде:
 (1.29) (1.29)
Максимальное значение скорости счета - квантов N(0)
определяется для заданной энергии источника по формуле:
 (1.30) (1.30)
гдеNmax
-
максимальная скорость счета у -квантов;
R
-
расстояние между источником и детектором;
 - эффективность детектора ( - эффективность детектора ( 0,85
); 0,85
);
s
-
эффективная площадь детектора;
а -
активность источника;
 - коэффициент ослабления излучения в воздухе (
=0.0073 см-1); - коэффициент ослабления излучения в воздухе (
=0.0073 см-1);
3.7*1010 -
число актов распада в одну секунду.
Для нашей разработки в качестве источника гамма - квантов выбираем ядро 60Со, внедренное в кристаллическую решетку In. Детекторами служат два сцинтилляторных счетчика с кристаллом NaI(Tl). В нашем случае расстояние между источником и детекторами составляет 4.5см.
В условиях малых расстояний активность источника должна быть минимальной, поэтому наиболее приемлемой является активность источника а=1*10-10 кюри.
Детекторы являются точечной целью, поэтому эффективная площадь детектора 8=0.1см. Детекторы в условиях малых энергий имеют незначительные габариты, и их размещение не создает неудобств. Источник - квантов не требует энергии, и может излучать в течении 5-ти лет, а детекторы потребляют менее 2-х Ватт.
Определим пеленгационную чувствительность измерителя:
 (1.31) (1.31)
Диаграмму направленности излучения можно аппроксимировать кривой:
 (1.32) (1.32)
где - ширина диаграммы на уровне половинной мощности. Тогда: - ширина диаграммы на уровне половинной мощности. Тогда:
 (1.33) (1.33)
где 
Для построения пеленгационной чувствительности была разработана программа [смотри приложение]. Результаты работы программы представлены на рисунке1.16.

Рисунок 1.6 График пеленгационнои чувствительности
Поскольку работа ГСОиН производится на малых углах (от -1°- 1°), то исходя из полученной пеленгационнои чувствительности видно, что этот участок является линейным участком нелинейной характеристики, следовательно - устройство будет линейным. Полученная характеристика удовлетворяет требованиям по чувствительности измерителя. Уменьшение угла наклона линейного участка приводит к ухудшению чувствительности, а его увеличение к чрезмерному усилению приводящему к самовозбуждению и увеличению мощности помех.
Увеличение эффективности процесса измерения связано с использованием метода сравнения, что предполагает наличие двух детекторов излучения. Принцип работы устройства, основанного на этом методе, аналогичен приведенному. В условиях резонанса детекторы относительно источника находятся на равносигнальном направлении и сигналы на их входе будут одинаковыми. При отклонении равносигнального направления от максимума на угол сигналы на детекторах будут разными (рисунок. 1.17). При этом:
- угол отклонения равносигнального положения от максимума;
S
1,
S
2 -
сигналы на первом и втором детекторах. Пеленгационная характеристика, пропорциональная углу отклонения, для метода сравнения имеет вид:
 (1.35) (1.35)
Разработанное устройство съема информации основывается на методе сравнения энергии сигналов. Устройство измерения угловых координат не является следящим и реализуется при отношении сигнал шум значительно превышающем единицу. Поэтому с выхода схемы сравнения и после усиления полученная информация о величине угла отклонения подается на индикаторы или в систему управления летательным аппаратом (ЛА). Канал управления ЛА не входит в задачу дипломного проекта и поэтому не рассматривается.
Функциональная схема гироскопа для ГСОиН с разработанным устройством представлена на рисунке 1.18.

Рисунок 1.18 Функциональная схема гироскопа для ГСОиН с разработанным устройством.
1 – источник гамма-квантов; 2 – детектор, ДМх, ДМу – датчикимоментов по осям; 3,4 – маятники
ГСОиН в своей структуре содержит гироскоп в кардановом подвесе. Такие гироскопы, в большинстве случаев используются для измерения: 1) курса, 2) углов крена, тангажа, 3) углов поворота объекта. Практически в конструкции гироскопа могут быть предусмотрены специальные моментные устройства (датчики моментов ДМх и ДМу), назначение которых заключается в том, чтобы устанавливать главную ось гироскопа oZ в требуемое положение. Перед запуском главная ось гироскопа должна быть соответствующим образом ориентирована относительно объекта или в пространстве.
При решении задачи начальной ориентации (коррекции) гироскопических систем углы отклонения составляют то -1°-1°. Предположим, что гироскоп в момент пуска ориентирован относительно объекта (ЛА) и является датчиком курсового угла. В силу рассмотренных в подразделе 1.1. свойств гироскоп будет сточностью до вредных уходов сохранять неизменным, направление своейточностью до вредных уходов сохранять неизменным , направление своей главной оси в абсолютном инерциальном пространстве. Если летательный аппарат (ЛА), под действием каких либо причин, изменит, например, угол курса (тангажа и т.д.) по сравнению с заданным, или в силу действия вредных моментов (дрейфа), то происходит угловое перемещение внешней рамки карданового подвеса относительно оси У. Маятник 4 выдает сигнал об этом отклонении и после его усиления подается на датчик моментов по оси X (ДМх), прикладывая момент к внутренней рамке подвеса.
В результате действия момента по оси X датчик вертикали 3 зарегистрирует отклонение. Указанное отклонение составляет 1-10 . После усиления сигнал будет подан на датчик момента по оси У (ДМу), что заставит повернуться внутреннюю рамку в исходное положение. Таким образом рамки карданового подвеса гироскопа будут ориентированы друг относительно друга под углом 90°.
Источники - квантов внедряем на оси рамок карданового подвеса гироскопа. Источники имеют возможность перемещения относительно детекторов этого излучения. Детекторы, в зависимости от того на какой оси установлены датчики съема информации, закрепляются на корпус гироскопа жестко связанного с летательным аппаратом. Возможно применение устройства съема информации в маятнике.
Достоинства и недостатки разработанного устройства.
Предложенный метод съема информации может применяться в датчиках вертикали с целью уменьшения зоны застоя и других вредных характеристик этого датчика влияющих на относительную ориентацию рамок гироскопа.
В то же время указанный метод при определенных условиях может быть использован в датчиках съема информации по углам крена, тангажа, курса. Здесь существует два способа использования -устройства:
1) Точного измерителя в случае применения грубого и точного каналов;
2) Автономного измерителя, что требует дополнительного исследования областиприменения эффекта Мессбауэра.
Применение данного устройства позволяет убрать вредные моменты отустройств съема сигналов (что значительно уменьшает дрейф гироскопа), и позволяет с чрезвычайной точностью измерять угловые координаты объекта, что имеет огромное значение для решения задач ориентации и навигации.
Разработанное устройство обладает следующими основнымипреимуществами:
- структура гамма-поля имеет высокую стабильность во времени;
- высокая направленность и относительно небольшая дальность действия сводят кминимуму помехи соседних систем;
- система обладает исключительно высокой надежностью, т.к. основная ее часть -источник излучения, почти абсолютно стабилен ( излучает 5 лет), относительнодешев, а детектор потребляет малую мощность.
Основным недостатком подобных устройств следует считать их радиационную опасность. Но выбранная нами активность источника (1-10-3 кюри)
позволит удовлетворить требования радиационной безопасности при эксплуатации устройства без применения различных устройств защиты(экранов, коллиматоров и т.д.). Все же необходимо учитывать радиационную опасность при монтаже и профилактическом обслуживании, замене источников и т.д. Все это создает эмоциональную напряженность операторов (летчиков, экипаж), а так же людей занимающихся обслуживанием этих систем.
ЗАКЛЮЧЕНИЕ
Тема дипломного проекта: "Исследование систем измерения траекторных параметров самолета при посадке на основе эффекта Мессбауэра".
Настоящий дипломный проект, посвящен разработке и исследованию -резонансного метода и средства съема информации с ГСОиН, на основе эффекта Мессбауэра.
Предлагаемое устройство съема информации, в отличие от традиционных датчиков съема (потенциометрических, емкостных, индуктивных и т.д.), имеют ряд преимуществ:
- уменьшение зоны застоя, дрейфа и других вредных характеристик,воздействующих на рамки гироскопа для ГСОиН.
- позволяет с чрезвычайной точностью осуществлять съем информации с ГСОиН,что имеет огромное значение для решения задач ориентации и навигации.
- структура гамма-поля имеет высокую стабильность во времени;
- высокая направленность и относительно небольшая дальность действия сводятк минимуму помехи соседних систем;
- система обладает исключительно высокой надежностью, т.к. основная ее часть -источник излучения, почти абсолютно стабилен (излучает 5 лет), относительно дешев, а детектор потребляет малую мощность. Основным недостатком подобных устройств следует считать их радиационную опасность. Но выбранная нами активность источника (1-10-3 кюри )
позволит удовлетворить требования радиационной безопасности при эксплуатации устройства без применения различных устройств защиты(экранов, коллиматоров и т.д.).
Указанный метод при определенных условиях может быть использован вдатчиках съема информации по углам крена, тангажа, курса. Здесь существует дваспособа использования - устройства:
1)Точного измерителя в случае применения грубого и точного каналов;
2) Автономного измерителя, что требует дополнительного исследования областиприменения эффекта Мессбауэра.
Приложение
.
Листинг программы
Program Diplom;
Uses Graph;
Const Beta_0_5 = 2.5;
Var q Real;
Beta Real;
i Integer;
GrDriver Integer;
GrMode Integer;
ErrCode Integer;
MaxX Integer;
MaxY Integer;
StringV String/begin GrDriver:=VGA;
GrMode :=VGAMed;
InitGraph (GrDriver,GrMode,T>:\TP6\BGI\T);
ErrCode:=GraphResult;
if (ErrCode <> grOK) then begin WriteLn ('
Ошибкаграфики
: *, GraphErrorMsg
(ErrCode) ) ;
Halt (1) end;
SetBkColor (Blue);
SetColor (LightCyan);
MaxX:=GetMaxX;
MaxY:=GetMaxY;
Line (MaxX div 2+2,10,MaxX div 2+2,MaxY-10); OutTextXY (MaxX div 2+11,20 Дградус
1);
Line (10,MaxY div 2+3,MaxX-10,MaxY div 2+3);
OutTextXY (MaxX-90,MaxY div2+10,*Beta, 1/
градус
*);
Line (MaxX div 2-3,17,MaxX div 2+2,10); Line (MaxX div 2+7,17,MaxX div 2+2,10);
Line (MaxX-lO.MaxY div 2+3,MaxX-18,MaxY div 2-2); Line (MaxX-lO.MaxY div 2+3,MaxX-18,MaxY div 2+8); for i:=-5 to 5 do begin
Line (MaxX div 2+2+iMO, MaxY div 2-2,MaxX div 2+2+iA40,MaxY div 2+8);
Str(i:2,StringV);
OutTextXY (MaxX div 2+2+iMO.MaxY div 2+10, StringV) end;
for i:=-6 to 6 do
begin
Line (MaxX div 2-3,Trunc(MaxY div 2+1*25+3),
MaxX div 2+7,Trunc(MaxY div 2+1*25+3));
Str(-l*0.05:4:2,StrlngV);
if (i<0) then
OutTextXY(MaxX div 2-42,Trunc(MaxY div 2+iA25+5),StringV) ; if(i>0)then
OutTextXY(MaxX div 2+9,Trunc(MaxY div 2+i*25+5),StringV); end;
SetCoior (LightRed);
SetLineStyle (0,0,3) ;
Beta:=-6;
I:=1
Repeat
q:=(1.4*Beta*Exp(-
0.7ASqr(Beta/BetaJ)_5))/Sqr(Beta_p_5)); Beta:==Beta+0.1; if(i=l)then
MoveTo(Trunc(MaxX div 2+Beta*40),Trunc(MaxY div 2-q*500)+2) else LineTo(Trunc(MaxX div 2+Beta*40),Trunc(MaxY div 2-q*500)+2); Inc(i) Until (Beta >
6) ; ReadLn; end.
|