Министерство образования и науки Украины
Донбасская государственная машиностроительная академия
Кафедра автоматизации производственных процессов
Расчетно – пояснительная записка
к курсовой работе по дисциплине
«Автоматизированный электропривод»
Вариант № 8 СЭП
Выполнил:
ст. группыАПП-03-2
Дьяков Алексей Викторович
Проверил:
Субботин Олег Владимирович
Краматорск 2007
ИСХОДНЫЕ ДАННЫЕ ДЛЯ ПРОЕКТИРОВАНИЯ
Исходные данные для проектирования, в соответствии с заданным вариантом задания (вариант №8 СЭП), приведены в таблице 1
Таблица 1 – Исходные данные для проектирования СЭП
| Вариант |
СЭП – 8 |
| Тип двигателя |
2ПН-132L |
| Мощность PH
, кВт |
3,0 |
| Сила тока якоря IH
, А |
16,9 |
| Напряжение якоря UH
, В |
220 |
| Частота вращения nН
, об/мин |
1000 |
| КПД, % |
75,5 |
| Сопротивление якоря RЯ
, Ом |
0,88 |
| Сопротивление дополнительных полюсов RДП
/RШ
, Ом |
0,64/198 |
| Момент инерции ротора JД
, кг·м2
|
0,047 |
| Приведенный момент инерции ∑ Ji
, |
3,5·JД
|
| Вид схемы соединения ТП |
з |
| Диапазон регулирования, D |
40 |
| Допустимое угловое ускорение ε, с-2
|
1900 |
| σРЭП
, % |
9,5 |
| σСЭП
, % |
1,3 |
РЕФЕРАТ
Данная расчётно-пояснительная записка содержит 61 страницу, 22 рисунка, 13 таблиц и 3 источника.
Объектом проектирования является электропривод подачи режущего инструмента металлорежущего станка.
Целью проектирования является разработка аналоговой системы автоматического управления электроприводом подачи режущего инструмента металлорежущего станка.
При выполнении данной работы необходимо: рассчитать и выбрать источник питания для электропривода на базе тиристорного преобразователя, исследовать статические и динамические режимы работы электропривода, спроектировать функциональную схему системы автоматического управления электроприводом подач режущего инструмента металлорежущего станка, в которой необходимо предусмотреть средства сопряжения измерительных преобразователей и исполнительных органов с микропроцессорной системой.
ТИРИСТОРНЫЙ ПРЕОБРАЗОВАТЕЛЬ, ЭЛЕКТРОДВИГАТЕЛЬ, ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА, САУ СЭП, ПИ-РЕГУЛЯТОР, ПЕРЕХОДНЫЙ ПРОЦЕСС, ПЕРЕРЕГУЛИРОВАНИЕ
ВВЕДЕНИЕ
В данной курсовой роботе рассматривается система управленияследящим електроприводом, т.е. приводом подач, который осуществляет перемещение заготовки или режущего инструмента в зоне резания.В соответствии с этим к приводу предъявляются следующие конкретные требования:
1) привод подач должен регулироваться при постоянном моменте (М=const). В механизмах подач основное усилие затрачивается на преодоление сил трения при перемещении узла станка;
2) приводы подач должны обеспечивать сверхширокий диапазон регулирования (D>10000), так как в станках с ЧПУ минимальная подача определяется дискретностью управления и обратной связи. Только при отработке приводом каждой дискреты могут быть обеспечены высокая точность и малая шероховатость при обработке;
3) приводы подач должны иметь высокие скорости быстрого хода и высокое быстродействие при разгоне - торможении и при сбросе - набросе нагрузки.
Расширение технологических режимов обработки на одном станке, с использованием современного режущего инструмента, привело к усложнению установленных электроприводов, увеличению установленной мощности двигателя главного движения, вращающих моментов двигателей подач, расширению диапазона регулирования скорости главного привода, рабочих подач и установочных перемещений, увеличению быстродействия всех приводов при управляющем и возмущающем воздействиях, ужесточению требований к стабильности и равномерности вращения электродвигателей всех приводов.
Требование повышения производительности привело к увеличению мощности и максимальной скорости привода главного движения, к повышению скорости быстрого хода приводов подач, увеличению максимальных рабочих подач; уменьшению времени разгона и торможения, позиционирования приводов подач, вспомогательных перемещений и ориентации шпинделя.
Необходимость удовлетворения требований снижения шероховатости и повышения точности при обработке и позиционировании способствовала ужесточению требований к электроприводам относительно значений погрешностей в установившихся и переходных режимах при различных возмущающих воздействиях, расширения диапазона регулирования и увеличения чувствительности электроприводов к входному воздействию и нагрузке, относительно повышения равномерности движения, особенно при малых скоростях, увеличения быстродействия при возмущении, нагрузке и при реверсе под нагрузкой на малой скорости.
Для обеспечения повторяемости размеров деталей в обрабатываемой партии и высокой точности позиционирования необходимо иметь высокостабильный привод с высокой равномерностью перемещения и апериодическим переходным процессом при изменении скорости.
Появление низкоскоростных высокомоментных двигателей небольших габаритов позволило существенно уменьшить механическую часть коробки подач, а в ряде случаев полностью ее убрать, установив исполнительный двигатель непосредственно на ходовой винт.
В случаях, когда двигатель не имеет коробки подач, повышается мощность механической передачи, КПД, снижается момент инерции электромеханического привода, увеличивается составляющая от резания в общей нагрузке приводов подач. В большинстве современных станков нагрузка на двигатель при рабочих подачах без резания составляет не более 20-30 % номинальной.
Рост составляющей от сил резания в общей нагрузке на привод подачи увеличил колебания нагрузки на электроприводе подачи при резании, что ужесточило требования к статической и динамической жесткости привода подачи.
Максимальная рабочая подача современных многоцелевых станков составляет 30-50 % скорости быстрых перемещений.
Скорость быстрых перемещений зависит от характеристик механической части привода, возможностей системы ЧПУ (в частности, от максимальной частоты сигнала управления приводом от системы ЧПУ), дискретности управления, максимальной угловой скорости приводного электродвигателя, коэффициента редукции передачи от двигателя к механизму и других ограничений, вносимых системой ЧПУ.
Стабильность позиционирования и обработки определяется, в первую очередь, стабильностью электропривода, датчика положения и системы ЧПУ. Стабильность характеристик электропривода при достаточно большом коэффициенте усиления определяется стабильностью нуля входного усилителя регулятора и датчика скорости – тахогенератора. Наибольшая относительная нестабильность имеет место при малых скоростях, когда полезный сигнал соизмерим с дрейфом нуля усилителя и падением напряжения в щеточном контакте тахогенератора.
Другим фактором, влияющим на стабильность, а следовательно, и на идентичность параметров при обработке партии деталей, является характер переходного процесса по управляющему воздействию в замкнутых системах следящего и регулируемого электроприводов.
Электроприводы подач подразделяются по следующим признакам:
- по способу выполнения силового преобразователя (виду силовых полупроводниковых приборов) – тиристорные на основе реверсивных управляемых выпрямителей, транзисторно-тиристорные на основе реверсивных широтно-импульсных преобразователей;
- по компоновке конструкции (числу приводов, выполненных в едином конструктиве) – однокоординатные, многокоординатные.
В состав электропривода подачи входят:
- электродвигатель постоянного тока с возбуждением от постоянных магнитов со встроенным датчиком скорости, электромагнитным тормозом, датчиком температурной защиты и датчиком пути;
- полупроводниковый преобразователь, включающий силовой блок (обеспечивает преобразование напряжения переменного тока в постоянное), регуляторы (обеспечивают регулирование скорости двигателя в широком диапазоне с высокой точностью), блоки питания, защиты и диагностики;
- силовой трансформатор (автотрансформатор) для согласования напряжения питающей сети с напряжением электродвигателя, ограничения тока короткого замыкания в приводе и снижения влияния помех или токоограничивающий реактор, ограничивающий ток короткого замыкания;
- коммутационные реакторы для снижения взаимного влияния приводов при многокоординатном исполнении и питании их от одного силового трансформатора (или через токоограничивающие реакторы);
- уравнительные или сглаживающие реакторы для ограничения уравнительных токов при совместном управлении выпрямительной и инверторной группами тиристоров и для сглаживания пульсаций тока якоря двигателя (в результате чего обеспечивается снижение нагрева и улучшение коммутации двигателя);
- автоматический выключатель для отключения привода от сети в аварийных режимах.
Состав электропривода может меняться в зависимости от конкретного типа электропривода и способа выполнения силового преобразователя.
Питание электропривода производится от трехфазной промышленной сети переменного тока напряжением 220, 380, 440, 500В, частотой 50Гц.
Сигнал управления, соответствующий максимальной скорости, - аналоговый и составляет +10В.
Электроприводы снабжаются аппаратурой защиты, сигнализации, индикации рабочих и аварийных режимов и имеют следующие виды защит: от коротких замыканий; токовых перегрузок; перенапряжений; исчезновения вентиляции (в системах с принудительным охлаждением), а также от напряжения сети; неправильного чередования фаз (при необходимости).
Силовые преобразователи выполняются в одно-, двухкомплектном вариантах с питанием от одного силового трансформатора.
Наработка на отказ комплектного электропривода не менее 4000 ч. Срок службы не менее 10 лет.
1. РАСЧЁТ И ВЫБОР ИСТОЧНИКА ПИТАНИЯ ДЛЯ ЭЛЕКТРОПРИВОДА НА БАЗЕ КОМПЛЕКТНОГО ТИРИСТОРНОГО ПРЕОБРАЗОВАТЕЛЯ
Для приводов средней и большой мощности, а также в случаях, когда необходим большой диапазон регулирования скорости двигателя, применяются трёхфазные шестипульсные схемы. Для приводов, где допустимое “мертвое” время составляет около 0,1 с и более, можно использовать схему тиристорного электропривода с реверсом в цепи якоря.
Схема тиристорного электропривода с реверсом в цепи якоря представлена на рисунке 1.1.

Рисунок 1.1 – Схема тиристорного электропривода с реверсом в цепи якоря
1.1
РАСЧЁТ И ВЫБОР СИЛОВОГО ТРАНСФОРМАТОРА
Расчет параметров силового трансформатора можно осуществить по методике, изложенной в методических указаниях [1].
Напряжение условного холостого хода тиристорного преобразователя (минимальное необходимое значение Еd0
):

где  – среднее значение выпрямленного напряжения на якоре электродвигателя, – среднее значение выпрямленного напряжения на якоре электродвигателя,  ; ;
 – падение напряжения на активном сопротивлении сглаживающего дросселя; – падение напряжения на активном сопротивлении сглаживающего дросселя;  ; ;
 – падение напряжения на активном сопротивлении силового трансформатора; – падение напряжения на активном сопротивлении силового трансформатора;  ; ;
 – коммутационное падение напряжения: – коммутационное падение напряжения:

где  – относительное напряжение короткого замыкания силового трансформатора, – относительное напряжение короткого замыкания силового трансформатора,  ; ;
А
– коэффициент, определяемый схемой преобразо-вателя (для мостовой трехфазной схемы А= 0,5);
 –изменение напряжения на выходе тиристорного преобразователя, вызванное колебанием напряжения в питающей сети переменного тока: –изменение напряжения на выходе тиристорного преобразователя, вызванное колебанием напряжения в питающей сети переменного тока:


где  - среднее значение падения напряжения на тиристорах, - среднее значение падения напряжения на тиристорах,  ; ;
Таким образом

Необходимое напряжение на вторичной обмотке силового трансформатора для мостовой трехфазной схемы должно быть:
 ; ;
 . .
Для регулирования скорости электродвигателя необходимо предусмотреть запас напряжения для регулирования его скорости, т.е линейное напряжение на вторичной обмотке трансформатора должно быть:
где  - запас напряжения для регулирования скорости электродвигателя, - запас напряжения для регулирования скорости электродвигателя,  . Тогда . Тогда
 . .
Теоретическое значение типовой мощности трансформатора идеального выпрямителя с нагрузкой на противо-ЭДС:
 , ,
где  – коэффициент схемы по мощности, – коэффициент схемы по мощности,  ; ;
 – ток нагрузки, – ток нагрузки,  ; ;
 – напряжение нагрузки, – напряжение нагрузки,  . .
Расчетная типовая мощность трансформатора:
 , где , где  , ,  . .
На основании найденных значений типовой мощности и линейного напряжения вторичной обмотки в соответствии с приложением Г методических указаний [1] принимаем трансформатор ТТ – 8 с параметрами, приведенными в таблице 1.1.
Таблица 1.1 – Параметры трансформатора ТТ – 8
Мощность
Р, кВт
|
Напряжение U1
, В |
Число витков |
Напряжение U2
, В |
Число витков |
UКЗ
, В |
UКА
, В |
Мощность к.з. трансформ, РКЗ
, Вт |
| 8 |
380/220 |
143 |
260±8 |
68 |
3,2 |
< 5 |
250 |
Для выбранного трансформатора и заданной схемы соединения вентилей определяем фактическое значение Еd0
:
 , ,
где значение K
СХ.Л
=1,35
– для мостовой схемы, или
 , ,
где значение K
СХ.Ф
=2,34
– для мостовой схемы.
Фактическое фазное напряжение вторичной обмотки трансформатора:
 , ,
где  - фактическое значение напряжения условного холостого хода тиристорного преобразователя. - фактическое значение напряжения условного холостого хода тиристорного преобразователя.
Теоретическое значение тока вторичной обмотки определяется на основе методики, изложенной в методических указаниях [1]:
 , ,
где – ток нагрузки, ;
КТ2
– коэффициент схемы по току вторичной обмотки;  . .
Ток вторичной обмотки:
 , ,
где  – коэффициент, характеризующий отклонение формы тока от прямоугольной. – коэффициент, характеризующий отклонение формы тока от прямоугольной.
Коэффициент трансформации:
 , ,
где U1Ф
– фазное напряжение на первичной обмотке, U1Ф
=220 В;
U2Ф
– фазное напряжение на вторичной обмотке, U2Ф
=154,73 В;
Теоретическое значение тока первичной обмотки:
где КТ1
– коэффициент схемы по току первичной обмотки, КТ1
=0,815
Ток первичной обмотки:
 , ,
1.2
Расчёт и выбор тиристоров для силовых вентильных блоков
Для выбора вентилей определяется среднее значение тока вентиля [1]:
где КТВ
– коэффициент схемы по среднему току вентиля, КТВ
=0,333.
Тогда  . .
Номинальный ток вентиля:
 , ,
где КВ
=(2 ... 2,5) – коэффициент запаса, выбираемый исходя из надежности работы вентиля с учетом пусковых токов.
Величина тока, проходящего через вентиль при коротком замыкании на стороне постоянного тока,
 . .
Полагая, что кратковременный допустимый ток, протекающий через вентиль не должен превышать 15-кратного значения номинального тока, найдем номинальный ток вентиля:
 . .
Максимальная величина обратного напряжения, прикладываемого к вентилю, определяется по соотношению:

где КНВ
– коэффициент схемы по максимальному напряжению вентиля, КН.В
=
1,065;
 – коэффициенты, – коэффициенты,  . .
По большему из двух полученных значений номинального тока и максимальному обратному напряжению принимаем в качестве вентиля тиристор низкочастотный типа Т132-40 параметры которого представлены в таблице 1.2.
Таблица 1.2 – Параметры тиристора Т132-40
| IОТКР.МАКС
, А |
IЗКР.МАКС
, mА |
IВКЛ
, mА |
UОТКР.МАКС
, В |
UЗКР.МАКС
, В |
UУ.ОТ
, В |
| 40 |
5 |
150 |
1,75 |
100…1200 |
4 |
1.3
Определение параметров якорной цепи электропривода
Активное сопротивление трансформатора, приведенное к цепи выпрямленного тока:
 , ,
где  – мощность короткого замыкания трансформатора, – мощность короткого замыкания трансформатора,  ; a
– число параллельных проводов, а=3; ; a
– число параллельных проводов, а=3;
m
– число фаз, m=3;
I2Л
– выпрямленный ток, I2Л
=14,8 А.
Индуктивное сопротивление трансформатора, приведенное к цепи выпрямленного тока:
 , ,
где UL
– индуктивная составляющая напряжения короткого замыкания трансформатора, UL
=0,05.
Сопротивление, вносимое за счет перекрытия анодных токов:
 , ,
где m
– коэффициент пульсаций, m
= 3.
Сопротивление щеточного контакта:
 . .
Индуктивность трансформатора, приведенная к контуру двигателя:

где f
– частота напряжения питающей сети, f=50 Гц.
Индуктивность двигателя складывается из индуктивности якоря и индуктивности дополнительных полюсов электродвигателя (n=2):
 , ,
где KL
– коэффициент индуктивности, KL
=0,6
;
UH
, IH
, ωН
– соответственно номинальное напряжение, ток и угловая скорость двигателя;
р
- число пар полюсов, p
=2.
Активное сопротивление сглаживающего дросселя:
 , ,
где - падение напряжения на активном сопротивлении сглаживающего дросселя; .
Расчетное активное сопротивление цепи якоря:

где RПР
– сопротивление проводников, RПР
< 1,5 Ом.
Индуктивность сглаживающего дросселя :
где E/
d0
– выпрямленная ЭДС преобразователя при условном холостом ходе и α=0, E/
d0
=361,8 В
;
iе
– относительная величина эффективного значения пульсаций первой гармоники выпрямленного тока, iе
= 0,02 ... 0,03;
ω’
– угловая скорость первой гармоники выпрямленного напряжения:

eп
– относительная величина эффективного значения первой гармоники выпрямленного напряжения при αПРЕД
, eп
=0,23
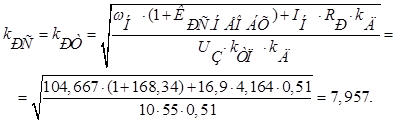
 , ,
где k
ФН
– номинальная величина коэффициента по потоку:

ωmin
– скорость вращения электродвигателя, соответствующая нижнему пределу его регулирования,
 , ,
где в – диапазон регулирования скорости, D=40. Тогда


Расчетная индуктивность якорной цепи:
 . .
Электромагнитная постоянная времени:
 . .
Электромеханическая постоянная времени:
 , ,
где J
– момент инерции привода в целом,

Следовательно
 . .
1.4 Построение статических характеристик
тиристорного преобразователя
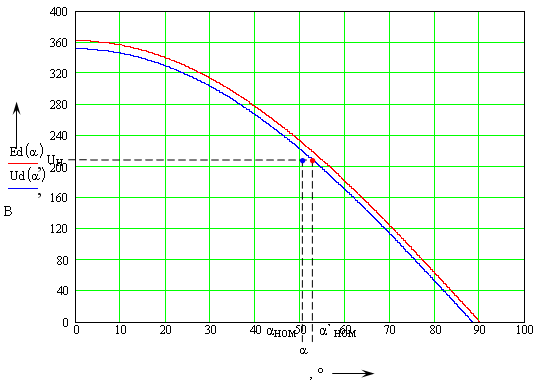
Регулировочная характеристика преобразователя при условном холостом ходе может быть построена по следующему уравнению:
 . .
Зависимость напряжения на якоре электродвигателя в функции угла регулирования преобразователя при неизменном (номинальном) моменте на валу может быть определена с помощью уравнения:
 , ,
где RT
+RП
– внутреннее сопротивление источника питания.
Таким образом

Результаты расчётов для построения статических характеристик представлены в таблице 1.3.
Таблица 1.3 - Результаты расчетов для построения статических характеристик
| α |
0° |
10° |
20° |
30° |
40° |
50° |
60 |
70° |
80° |
90° |
| Ed
(α) |
361,80 |
356,30 |
339,98 |
313,33 |
277,15 |
232,56 |
180,90 |
123,74 |
62,83 |
0 |
| Ud
(α) |
351,24 |
345,74 |
329,42 |
302,77 |
266,59 |
222,00 |
170,34 |
113,18 |
52,27 |
- |
По значениям  и и  найдём так называемый динамический запас по напряжению найдём так называемый динамический запас по напряжению  , необходимый для реализации жесткой характеристики при действии отрицательной обратной связи по скорости: , необходимый для реализации жесткой характеристики при действии отрицательной обратной связи по скорости:
 . .
Начальный (минимальный) угол регулирования можно определить графически или из уравнения:
 . .
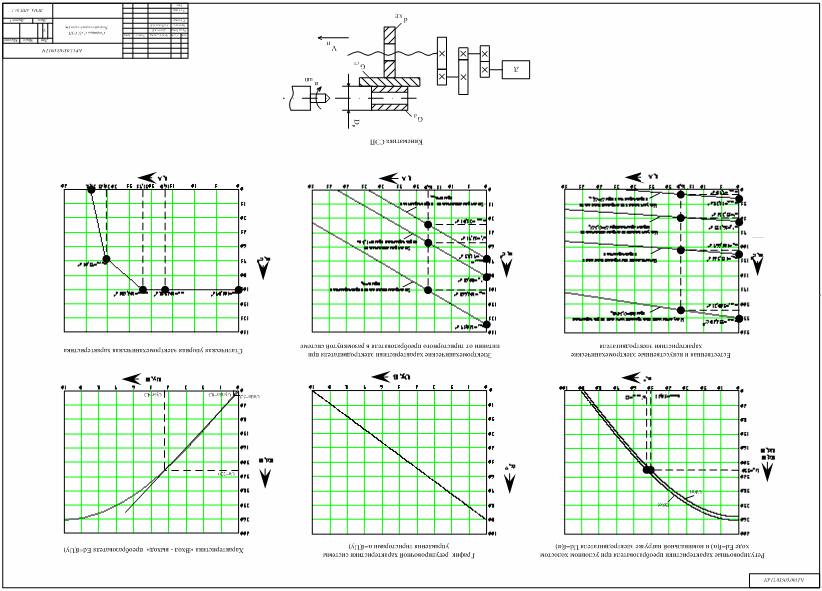
Графики статических характеристик приведены на рисунке 1.2
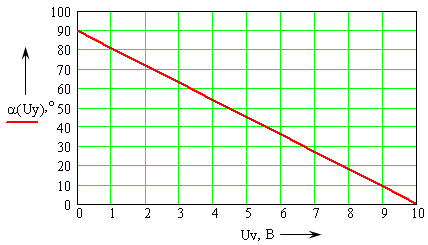
Характеристика “вход - выход” преобразователя EТП
=Еd=f(UУ
) может быть построена при известной регулировочной характеристике системы управления тиристорами  = f (UУ
), представленной на рисунке 1.3 и по регулировочной характеристике Ed= f (), представленной на рисунке 1.2 путем последовательного перестроения. = f (UУ
), представленной на рисунке 1.3 и по регулировочной характеристике Ed= f (), представленной на рисунке 1.2 путем последовательного перестроения.
Общий вид зависимости EТП
=Ed
=f(UУ
) для соответствующей системы приведен на рисунке 1.4.
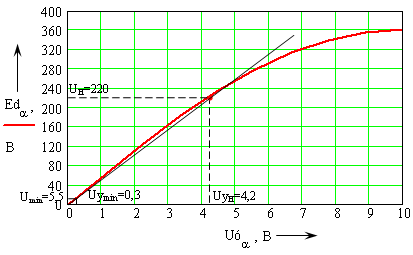

Значение  определяем исходя из заданного диапазона регулирования: определяем исходя из заданного диапазона регулирования:
 . .
Ему соответствует угол регулирования  и, соответственно, и, соответственно,  . .
По полученной характеристике определяем коэффициент передачи преобразователя:
 . .
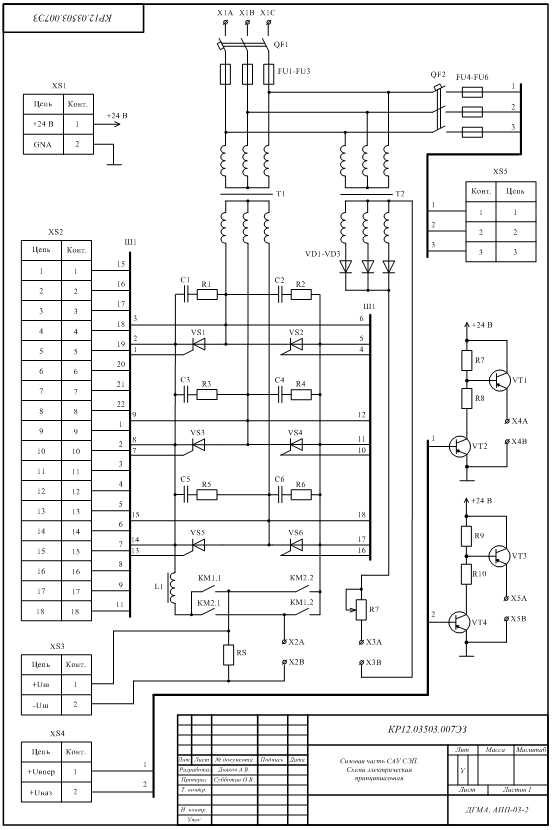
1.5 Выбор и краткое описание комплектного тиристорного преобразователя
По результатам расчетов и построенной статической характеристике выбираем источник питания на базе КТП – нереверсивную трёхфазную тиристорную станцию управления двигателями типа ШУВ3501-12АУ4. Станция имеет мостовую силовую схему, рассчитана на номинальный выпрямленный ток до 50 А, номинальное выпрямленное напряжение до 230 В.
Структурная схема комплектного тиристорного преобразователя серии ШУВ3501-12АУ4 представлена на рисунке 1.5.
На рисунке 1.5 приняты следующие обозначения:
Р – токоограничительные реакторы; БЗРП – блок защиты сети от радиопомех; А1-А4 – автоматические выключатели; ТТ – трансформаторы тока; БЗП – блок защиты от перенапряжений; ВС – вентильная секция; ПР – предохранитель; БЗ – блок защиты; УДР – узел управления дистанционным расцепителем; ПДТ – панель датчика тока; СЗ – сеточная защита; ПНЗ – панель нулевой защиты; РУ – регулирующее устройство; БУПН – блок усилителя полупроводникового нереверсивного; БКТ – блок коррекции и токоограничения; ЛУ – логическое устройство; БЛ – блок логики; БКЛ – блок ключей; ДН – датчик напряжения; Ф – фильтр сетевого напряжения; БП – блок питания; БВ – блок возбуждения двигателя; В – вентилятор.
Станция управления состоит из регулируемого тиристорного выпрямителя, выполненного по мостовой трехфазной схеме, а также блоков управления и регулирования, обеспечивающих создание автоматизированного регулируемого электропривода постоянного тока.
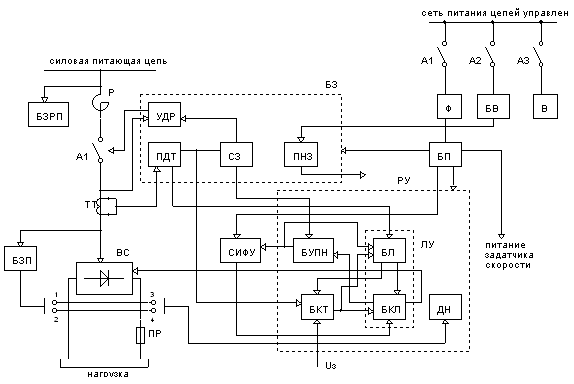
Рисунок 1.5 – Структурная схема комплектного тиристорного преобразователя серии ШУВ3501-12АУ4
Блок БЛ преобразует реверсивный сигнал  в однополярный для управления нереверсивным усилителем. в однополярный для управления нереверсивным усилителем.
Введение блокировки по выходному напряжению усилителя позволяет переключать импульсы только при нулевом напряжении усилителя, соответствующем  , что исключает броски тока при реверсе и торможении привода. При смене полярности задающего напряжения , что исключает броски тока при реверсе и торможении привода. При смене полярности задающего напряжения  меняет знак, давая БЛ команду на переключение ключей, однако БЛ не изменяет своего состояния из-за наличия блокировок по току и напряжению усилителя. Начинается быстрый спад напряжения на выходе усилителя и тока в силовой цепи. При снижении напряжения и тока до нуля БЛ выдает команду на переключение ключей в БКЛ, при этом также меняется полярность управляющего сигнала на входе нереверсивного усилителя. меняет знак, давая БЛ команду на переключение ключей, однако БЛ не изменяет своего состояния из-за наличия блокировок по току и напряжению усилителя. Начинается быстрый спад напряжения на выходе усилителя и тока в силовой цепи. При снижении напряжения и тока до нуля БЛ выдает команду на переключение ключей в БКЛ, при этом также меняется полярность управляющего сигнала на входе нереверсивного усилителя.
Реверс двигателя осуществляется переключением полярности питания в цепи якоря двигателя.
2. СТАТИЧЕСКИЕ РЕЖИМЫ РАБОТЫ САУ ЭП
2.1 Построение естественной электромеханической характеристики
(при питании от сети), характеристики в разомкнутой
системе (при питании от ТП)
Уравнение механической характеристики двигателя постоянного тока независимого (параллельного) возбуждения имеет вид [1]:
 , ,
где UC
– напряжение, подводимое к якорной цепи электродвигателя, UC
=UH
=220
В; kФН
– конструктивный коэффициент двигателя (по потоку), kФН
=1,96 В·с
; M
– электромагнитный момент, развиваемый двигателем:
 ; ;
RДВ
– сопротивление цепи якоря:
 ; ;
ω0
– скорость идеального холостого хода:
 ; ;
Δω – перепад скорости, с-1
.
Приведенное уравнение преобразуют в уравнение электромеханической (скоростной) характеристики:
 , ,
где I
– сила тока в нагрузке, I=16,9 А
.
Для построения электромеханической характеристики необходимо определить номинальную скорость вращения ωН
:
 . .
Естественная электромеханическая характеристика представляет собой прямую линию, поэтому для её построения достаточно воспользоваться двумя точками с координатами (ω0
,
I
=0; ωН
,
I
=
IH
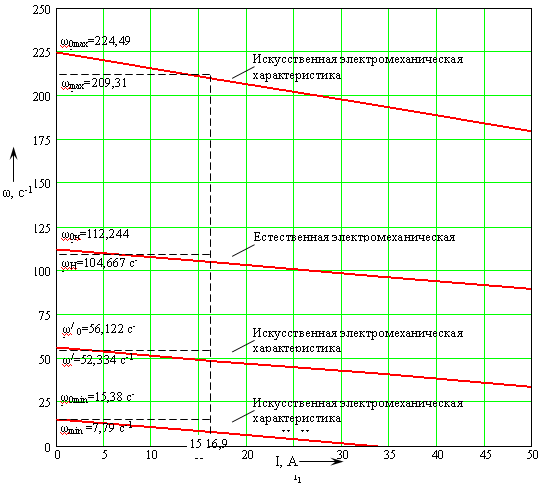
). Естественная электромеханическая характеристика электродвигателя при питании от сети представлена на рисунке 2.1.
При изменении напряжения на якорной цепи двигателя его характеристики перемещаются параллельно естественной (т.е. жесткость не меняется). Скорость идеального холостого хода ω/
0
при напряжении отличном от номинального, можно найти по соотношению:
 , ,
где ω0
– скорость идеального холостого хода, ω0
=112,244 с-1
;
UН
– номинальное напряжение, подводимое к якорной цепи электродвигателя, UH
=220
В;
U
– напряжение, подводимое к якорной цепи электродвигателя, U=0,5·UН
В;
Таким образом
 . .
Проведя прямую через ω/
0
параллельно естественной характеристике, получают искусственную механическую характеристику при сниженном напряжении U=0,5·UН
, которая представлена на рисунке 2.1.
Характеристика при минимальном напряжении должна быть такой, чтобы при изменении в необходимых пределах момента на валу двигателя, последний не останавливался. Проведя прямую через точку ω=0; I=2IH
,
параллельно естественной характеристике, получаем искусственную характеристику при минимальном напряжении, представленную на рисунке 2.1 и находим скорости ω0min
=15,38 с-1
,
и ωmin
=7,79 с-1
.
Тогда минимальное напряжение будет равно:
 . .
С учетом условий нагрева, при регулировании скорости ослаблением магнитного потока, ток в якорной цепи не должен превышать номинального значения.
Построение искусственной характеристики в данном случае можно выполнить в следующей последовательности:
Скорость холостого хода:

Номинальная скорость при 0,5·kФН
:
 . .
Искусственная механическая характеристика при снижении величины потока до 0,5·
k
ФН
приведена на рисунке 2.1.
Диапазон регулирования скорости в первой зоне (изменением напряжения)
 . .
Диапазон регулирования скорости во второй зоне (изменением магнитного потока)
 . .
Полный диапазон регулирования
 . .
Жесткость механической характеристики при изменении напряжения
 . .
Статизм характеристики определяется следующим образом:
 . .
Построение электромеханических характеристик двигателя при питании от преобразователя в разомкнутой системе и при допущениях непрерывности тока вплоть до I=0
можно осуществить по формуле:
 . .
Характеристики следует строить при углах управления αН
(обеспечивает получение номинальной скорости  Н
при номинальном токе нагрузки), α=1,5 α H
и α = α max
(обеспечивает минимальную скорость при номинальной нагрузке). Н
при номинальном токе нагрузки), α=1,5 α H
и α = α max
(обеспечивает минимальную скорость при номинальной нагрузке).
Значение αН
определим из следующей формулы:
 . .
Задаваясь токами I
, находят им соответствующие скорости и строят электромеханическую характеристику при α=αН
.
Результаты расчётов для электромеханической характеристики при α=αН
представлены в таблице 2.1.
Таблица 2.1 – Результаты расчётов для электромеханической характеристики при α=αН
|
Н
= 40,4° |
1,5 Н
= 60,6° Н
= 60,6° |
max
= 67,1° |
| I |
0 |
IH
|
2IH
|
0 |
IH
|
2IH
|
0 |
IH
|
2IH
|
|
140,57 |
104,67 |
68,76 |
90,62 |
54,71 |
18,81 |
71,82 |
35,91 |
0 |
Для построения характеристики при максимальном угле управления через точку (ω=0, I=2IН
) параллельно характеристике при α=1,5αн
проводится прямая до пересечения с осью скорости.
Электромеханические характеристики электродвигателя при питании от тиристорного преобразователя в разомкнутой системе регулирования представлены на рисунке 2.2.
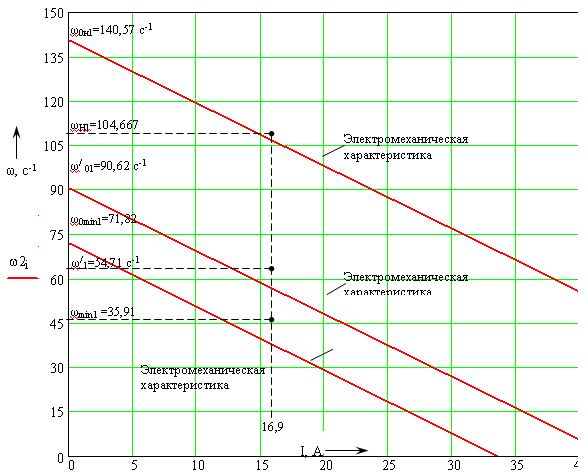
Результат сравнения рисунков 2.1 и 2.2 следующий: качественные показатели характеристик при питании электродвигателя от тиристорного преобразователя в разомкнутой системе хуже, нежели при питании его от сети (жёсткость характеристик при питании электродвигателя от тиристорного преобразователя в разомкнутой системе ниже за счёт увеличения сопротивления якорной цепи). Максимальный угол регулирования:
 . .
Жесткость характеристик можно определить по известному соотношению:
 . .
Статизм определяется следующим образом:
 . .
2.2 Построение электромеханической характеристики РЭП
в
замкнутой системе
Структурная схема РЭП приведена на рисунке 2.3. На рисунке приняты следующие обозначения: ЗИ – задатчик интенсивности; Uз – напряжение задания; Uу2 – напряжение управления во внешнем контуре, определяемое разностью между Uз и сигналом обратной связи по скорости КС
·ω, где Кс=Ктг·Кпу; НЭ2 - нелинейный элемент в регуляторе скорости – зона насыщения; РС – регулятор скорости; Крс – коэффициент усиления регулятора скорости, Uрс – выходное напряжение РС; Uос – обратная связь по скорости; Uу1 – напряжение управления во внешнем контуре; РТ – регулятор тока; Uрт – выходное напряжение РТ; ТП – тиристорный преобразователь; Ud – напряжение на выходе ТП; Д1 – статорная часть электродвигателя; Мс - момент сопротивления; Id – ток двигателя; Д2 – якорная часть электродвигателя; ДТ – датчик тока ; НЭ1 – нелинейный элемент в контуре тока – зона нечувствительности; ω – угловая скорость – выходной регулируемый параметр; Uср1 – напряжение сравнения в контуре тока; ТГ – тахогенератор – реализует обратную связь по скорости; Ктг – коэффициент передачи по скорости; ПУ – промежуточный усилитель в цепи обратной связи по скорости или делитель напряжения; kФн
– конструктивный коэффициент электродвигателя.
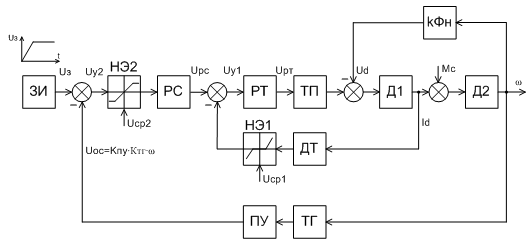
Рисунок 2.3 – Структурная схема двухконтурной САУ РЭП
В схеме используется отрицательная обратная связь по скорости и отрицательная обратная связь по току с отсечкой [1].
Цепь обратной связи по току выполнена нелинейной с зоной нечувствительности Uср1, а входной каскад усилителя насыщается при Uсн2.
Требуемый коэффициент усиления разомкнутой системы, необходимый по соображениям заданного статизма σЗ
, определяется следующим образом:
 . .
Перепад скорости в замкнутой системе:
 , ,
где δЗ
– заданный относительный перепад двигателя при номинальной нагрузке; δЗ
=0,05…0,1;
D
– заданный диапазон регулирования скорости, D=40.
Перепад скорости в разомкнутой системе:
 . .
Таким образом, требуемый коэффициент усиления разомкнутой системы, необходимый по соображениям заданного статизма σЗ
, составит:
 . .
Необходимый коэффициент обратной связи по скорости
 . .
где kТП
–
коэффициент передачи тиристорного преобразователя, kТП
=55;
kД
–
коэффициент преобразования двигателя, kТП
=0,51;
kРС
, kРТ
– коэффициенты усиления регуляторов скорости и тока соответственно,
Тогда  . .
По полученному значению КС,НЕОБХ
из приложения Д [ист. 1] выбираем тахогенератор АТ – 161 с параметрами, приведенными в таблице 2.2.
Таблица 2.2 – Параметры тахогенератора АТ – 161
| UВОЗБУЖД
, В |
ωМАКС
, об/мин |
kТГ
|
f, Гц |
m, кг |
| 110 |
4000 |
0,096 |
400 |
0,9 |
Согласующий промежуточный усилитель в цепи ОС (см. рис. 2.3) рассчитывается исходя из формулы:
 , откуда , откуда
 . .
Скорость идеального холостого хода определяется из уравнения статической характеристики для замкнутой САУ [1]:
 . .
На упорной характеристике выделено пять характерных точек (Т1, Т2, Т3, Т4, Т5), каждая из которых определяется двумя координатами – значением угловой скорости ω
и заданным значением силы тока I:
Т1 ( I = 0, ω= ω0
) – точка идеального холостого хода;
T2 ( I = IН
, ω= ωН
) – точка номинального режима;
Т3 ( I = IНАС
, ω= ωНАС
) – точка, в которой регулятор скорости переходит в режим насыщения (отрицательная обратная связь по скорости прекращает свое действие). IНАС
= (1,3...1,4)·IН
– по выбору проектировщика;
Т4 ( I = IОТС
, ω= ωОТС
) – точка, в которой вступает в действие отсечка по току IОТС
= (1,7…1,8)·IН
– по выбору проектировщика;
Т5 ( I = IСТ
,
ω= ωСТ
=0) – точка, в которой наступает стопорный режим: двигатель работает на упор при I=IСТ
=2·IН
, а скорость ω равна нулю.
Для дальнейших расчётов принимаем следующие значения токов:
IН
=16,9 А;
IНАС
=1,3· IН
=1,3· 16,9=21,97 А;
IОТС
=1,8· IН
=1,· IН
=30,42 А;
IСТ
=2·IН
=2·16,9=33,8 А.
Просадка скорости при номинальной нагрузке:

Номинальная скорость:

Просадка скорости при токе насыщения:

Скорость в точке насыщения:
 . .
Просадку скорости при наступлении токовой отсечки для замкнутой системы определим по формуле:
 . .
Значение скорости в момент включения отсечки:
 . .
Статическая электромеханическая характеристика в замкнутой САУ ЭП при IНАС
<IОТС
представлена на рисунке 2.4 и состоит из трёх участков.
На участке I действует обратная связь по скорости (ООС). Величина сигнала UУ2
<UСР2
, kT
··
I
Я
<UСР1
, система находится в режиме поддержания постоянства заданной скорости.
На участке II I
ДВ
>
I
НАС
, U
У2
>
U
СР2
, I
ДВ
·
k
Т
<
U
СР1
, перестает действовать обратная связь по скорости. Система превращается в разомкнутую. Наклон характеристики заметно увеличивается.
На участке III I
ДВ
≥
I
НАС
, U
У2
>
U
СР2
, I
ДВ
·
k
Т
>
U
СР1
. Вступает в действие отрицательная обратная связь по току (ООТ), под влиянием которой формируется крутопадающая часть характеристики.
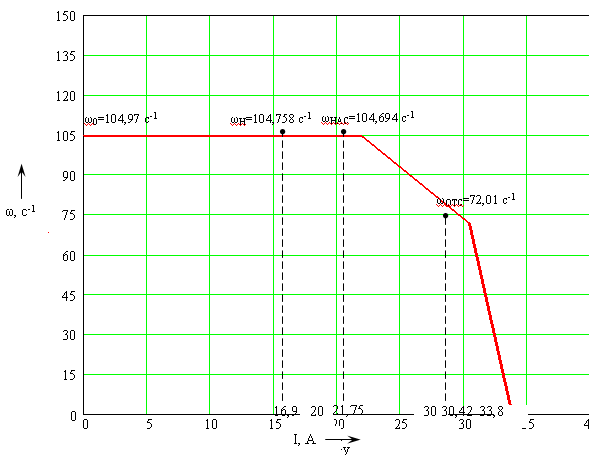
Определяем статизм системы:
 . .
Произведём сравнение параметров регулирования во всех вариантах питания электродвигателя: как видно из рисунка 2.4 замкнутая система регулирования обладает самыми лучшими параметрами регулирования, а именно жёсткость рабочей части характеристики стремится к абсолютно жёсткой, следствием чего является малая просадка в скорости даже при больших нагрузках.
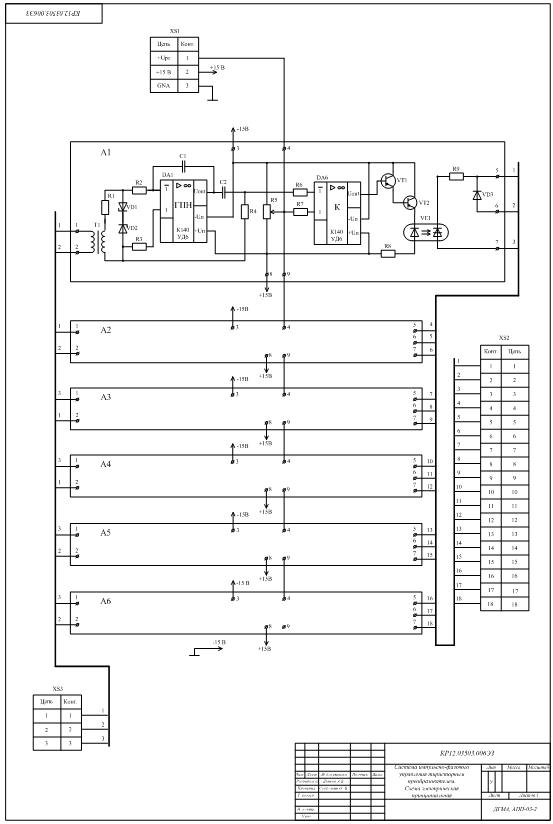
2.3 Расчёт входного контура (задатчика интенсивности)
Для получения постоянного динамического тока якоря в переходных режимах система управления электропривода должна обеспечить постоянное ускорение двигателя. Это легко достигается с помощью задатчика интенсивности, схема которого представлена на рисунке 2.5.
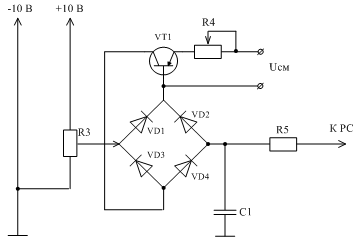
Рисунок 2.5 – Электрическая схема входного каскада САУ РЭП (ЗИ)
Принцип работы задатчика заключается в следующем. Входное постоянное напряжение, пропорциональное заданной скорости привода, заряжает конденсатор С, в цепи которого установлен транзистор VT1, регламентирующий зарядный ток конденсатора. При любой полярности входного напряжения требуемая полярность напряжения на электродах транзистора обеспечивается диодами моста UZ. Благодаря включению транзистора по схеме с общей базой его коллекторные характеристики идут почти параллельно оси абсцисс и зарядный ток конденсатора С остается постоянным вплоть до очень малого значения напряжения на переходе «коллектор-база». Величина зарядного тока регулируется током смещения через эммитерный переход.
При этом напряжение на конденсаторе изменяется во времени согласно уравнению:
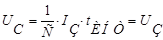
где UC
- напряжение на конденсаторе, В;
C - емкость зарядного (накопительного) конденсатора, мкФ;
IЗ
- сила тока заряда конденсатора, А;
UЗ
- напряжение задания, В.
Время интегрирования, нарастания входного сигнала UЗ
:
 , ,
где ∆ω - нарастание угловой скорости при разгоне от 0 до ω
Н
;

ε – допустимое угловое ускорение, ε=1900 с-2
. Тогда
 . .
Параметры С и UН
зарядного конденсатора находятся из уравнения экспоненты:
  , ,
где R – общее сопротивление в эмитерной линии, R
=RОГР
+RП2
.
Значение экспоненциального выражения определим как:
 . следовательно: . следовательно:
 . Положим . Положим
 , тогда: , тогда:
 , откуда , откуда
 . Таким образом, получили: . Таким образом, получили:
 . .
Подставив в данное выражение значение t
ИНТ
=0,055
(определено выше) получим численное значение соотношения R·C, а именно:
 . .
Зададимся значением сопротивления (R=1000 Ом) и определим ёмкость конденсатора:

Принимаем конденсатор С1 типа К73-5-12мкФ±5%.
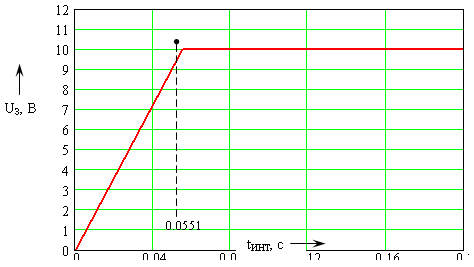
Таким образом, в задатчике интенсивности ЗИ происходит формирование UЗ
, линейно возрастающего до номинального значения за время tИНТ
= 0,0551 с (темп нарастания UЗ
).
Величина зарядного тока (тока коллектора) определим из выражения:
 , откуда , откуда

Принимаем транзистор VT1 с p-n-pпереходом типа КТ343А, параметры которого представлены в таблице 2.3.
Таблица 2.3 – Параметры транзистора КТ343А
| Тип проводимости |
UКЭ
, В |
UБЭ
, В |
IK
.
MAX
, мA |
IИМП
, мA |
UНАС.КЭ
, В |
UНАС.БЭ
, В |
β |
IK
ОБР
, мкA |
IЭОБР
, мкA |
| p-n-p |
17 |
4 |
50 |
150 |
0,3 |
0,95 |
30-70 |
1 |
100 |
Характер формирования Uз
на ЗС и ЗИ приведен на рисунке 2.6.
2.4
Расчёт и выбор нелинейных элементов контуров скорости и тока
Выбор регулятора скорости PС и зоны насыщения НЭ2 осуществляется в соответствии со схемой на рисунке 2.7. Статическая характеристика зоны насыщения НЭ2 представлена на рисунке 2.8.
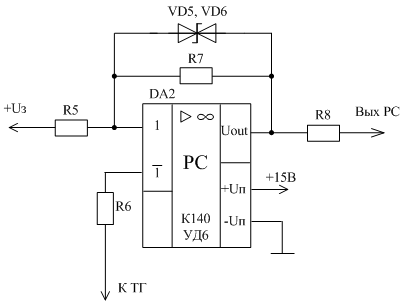
Рисунок 2.7 – Схема регулятора скорости и НЭ2
Входное напряжение на Н32, определяется разностью между напряжением задания и сигналом обратной связи по скорости, а именно:
 . .
Входное напряжение на Н32 при скорости насыщения, когда происходит пробой стабистора VD1,2,а регулятор входит в зону насыщения и обратная связь по скорости перестает функционировать определим по формуле:
 . .
По значению UСР2
= UПР
выбирается стабилитрон 2С107А с параметрами, приведенными в таблице 2.4.
Таблица 2.4 – Параметры стабилитрона 2С107А
| UСТ.НОМ
, В |
UСТ.
MIN
, В |
UСТ.
MAX
, В |
IСТ.
MAX
, мA |
IСТ.
MIN
, мA |
IСТ
, мA |
PMAX
, мВт |
| 0,7 |
0,6 |
0,8 |
120 |
1 |
10 |
125 |
Вольтамперная характеристика (ВАХ) стабилитрона 2С107А представлена на рисунке 2.9.
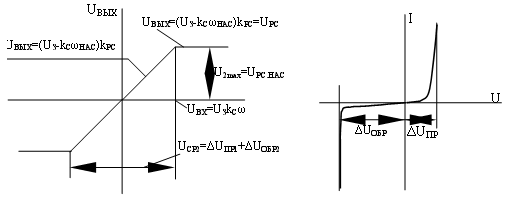
Рисунок 2.8 – Статическая характеристика Рисунок 2.9 – ВАХ стабилитрона зоны насыщения НЭ2 2С107А
Напряжение на выходе регулятора скорости при ωНАС
:
 . .
Реализация регулятора тока KРТ
и зоны нечувствительности в контуре тока НЭ1 осуществляется в соответствии со схемой, представленной на рисунке 2.10.Статическая характеристика зоны нечувствительности представлена на рисунке 2.11.
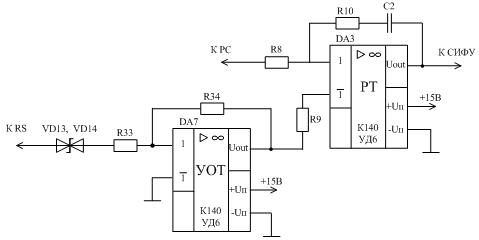
Рисунок 2.10 – Схема регулятора тока и НЗ1
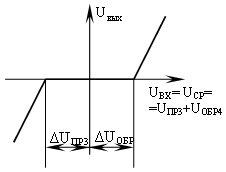
Рисунок 2.11 – Характеристика НЗ1 на РТ
Значение коэффициента обратной связи по току КТ
:
 , ,
где ICT
– ток стопорения, ICT
=33,8 А;
IОТС
– ток отсечки, IОТС
=30,42 А;
UРС.НАС
– напряжение на выходе регулятора скорости в режиме насыщения, UРС.НАС
=0,676 В.
Сигнал обратной связи по току определяется как:
 , ,
где UCP1
- напряжение сравнения в Н31 – пробой стабилитрона VD3,4, В.
 . .
По значению UСР1
принимаем 2 стабилитрона типа MMSZ5233BT1 c параметрами, приведенными в таблице 2.5.
Таблица 2.5 – Параметры стабилитрона MMSZ5233BT1
| UСТ.НОМ
, В |
UСТ.
MIN
, В |
UСТ.
MAX
, В |
IСТ.
MAX
, мA |
IСТ.
MIN
, мA |
IСТ
, мA |
PMAX
, мВт |
| 6,0 |
5,7 |
6,3 |
120 |
1 |
20 |
500 |
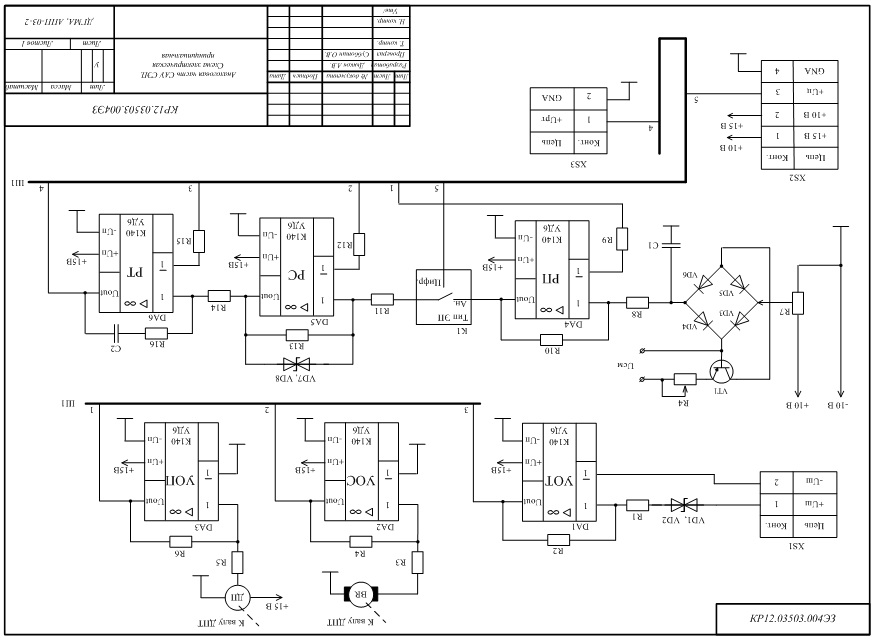
Реализация схемы токоограничения по постоянному току, когда датчиком тока является шунт, представлена на рис. 2.12.
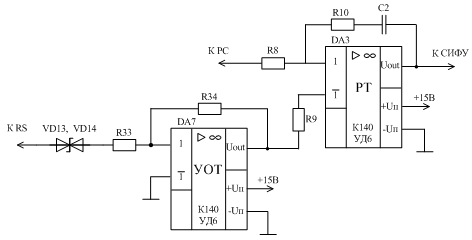
Рисунок 2.12 – Реализация схемы токоогораничения по постоянному току
На рисунке 2.12 приняты следующие обозначения: R34 - резистор обратной связи усилителя DA7; R33 - входной резистор; VD13, VD14 - стабилитроны, реализующие напряжение сравнения UCP1
; DA3 - полупроводниковый усилитель, на котором реализуется регулятор тока типа ПИ-регулятора; R8- входной резистор.
2.5 РАСЧЕТ РЕГУЛЯТОРА ПОЛОЖЕНИЯ И ВЫБОР ДАТЧИКА
В следящем электроприводе при исследовании динамики необходимо выбрать датчик положения и регулятор в III контуре – регулятор положения, а также определить напряжение задания для СЭП UЗ.СЭП
и передаточную функцию редуктора.
В соответствии с приложением Е [1] в качестве датчика положения принимаем индуктосин ПИКП1 – А3, параметры которого приведены в таблице 2.6
Таблица 2.6 – Параметры индуктосина ПИКП1 – А3
| Вид контсрукции |
Шаг, мм |
Частота, Гц |
Напряжение питания, В |
Коэффициент передачи |
Точность, мкм |
| Круговой |
2°
±40´
|
10000±500 |
0,6±0,1 |
0,004 |
5-15 |
Передаточная функция редуктора WР
(p) является передаточной функцией интегрирующего звена:
 , ,
где Kp – коэффициент передачи редуктора,
 , ,
где Uр – передаточное число редуктора, Uр=60.
Тогда
 , ,
 . .
Регулятор положения целесообразно выбирать с пропорциональным законом регулирования, т.е:
 . .
Его значение выбирается из выражения статической погрешности:
 , ,
где l
З
– заданное значение линейного перемещения рабочего органа, l
З
=10 м;
KV
– коэффициент передачи по скорости:
 , где , где  . .
Отсюда 
Напряжение задания для СЭП определится из соотношений:

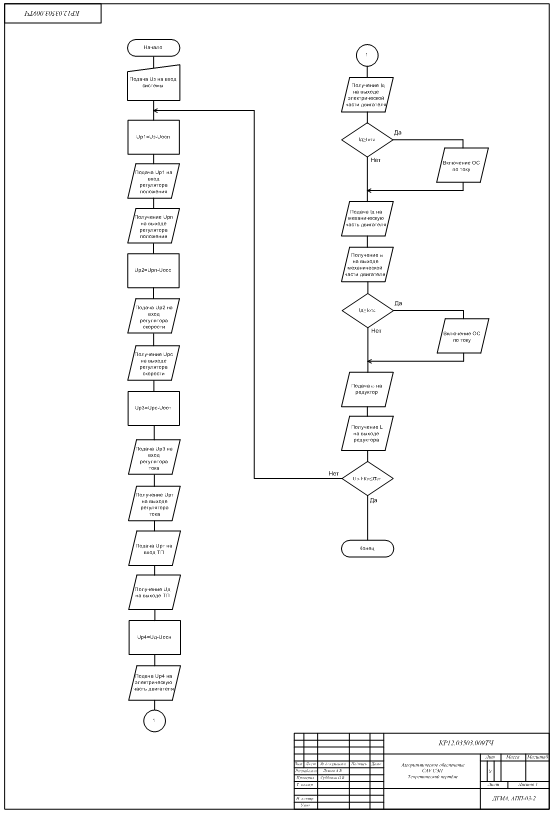
3.
ДИНАМИКА САУ СЭП
Целью исследования динамики является определение качества регулирования параметров i(t), φ(t) в переходных процессах, возникающих при изменении:
задающего напряжения UЗ
=10 B при отсутствии нагрузки - пуск вхолостую ( ). ).
приложенной нагрузки - наброс нагрузки ( ); );
снятии нагрузки ( ); );
снижении в два раза UЗ
- в режиме генераторного торможения.
Оценка качества регулирования и устойчивости осуществляется прямым способом по кривой переходных режимов i(t), φ(t).
3.1 СТРУКТУРНАЯ ОПТИМИЗАЦИЯ САУ СЭП
Оптимизация контуров управления САУ СЭП осуществляется в соответствии с методикой, изложенной в приложении К и в работе [20].
Расчет осуществляется в соответствии с идеей технического оптимума для астатических систем 1-го порядка (систем однократного интегрирования). Сущность его сводится к предварительному определению структуры регуляторов тока, скорости и положения исходя из оптимального апериодического процесса для скорости и экспоненциального для положения. Для тока принимаем колебательный переходный процесс.
Разновидности желаемых передаточных функций для различного вида переходных процессов представлены в таблице 3.1. В таблице указаны оптимальные передаточные функции разомкнутых контуров регулирования в соответствии с желаемым переходным процессом в контуре.
Таблица 3.1 - Желаемые передаточные функции разомкнутых контуров управления для различного вида переходных процессов
| Вид переходного процесса |
 |
 |
 |
 |
| 1 Экспоненциальный |
4 |
 |
 |
 |
| 2 Апериодический |
2 |
 |
 |
 |
| 3 Колебательный |
1 |
 |
 |
 |
3.1.1 ОПТИМИЗАЦИЯ ПЕРВОГО КОНТУРА (СИНТЕЗ РЕГУЛЯТОРА ТОКА)
Желаемая передаточная функция разомкнутого первого контура:
 , ,
где  - неизвестная передаточная функция регулятора тока; - неизвестная передаточная функция регулятора тока;
 - желаемая передаточная функция разомкнутого первого контура; - желаемая передаточная функция разомкнутого первого контура;
 - передаточная функция, состоящая из реальных звеньев в разомкнутой системе; - передаточная функция, состоящая из реальных звеньев в разомкнутой системе;
 - передаточная функция датчика тока. - передаточная функция датчика тока.
Исходя из принципа последовательной коррекции, находим передаточную функцию регулятора тока (изменяемая часть):
 , ,
 , ,
где kД1
– коэффициент электрической части двигателя:
 Ом-1
; Ом-1
;
kТП
– коэффициент передачи тиристорного преобразователя, kТП
=55;
kДТ
– коэффициент передачи датчика тока, принимается kДТ
=1;
ТЭ
– электромагнитная постоянная времени, ТЭ
=0,0251 с-1
;
Тμ
–малая некомпенсируемая постоянная времени, Тμ
=0,005 с-1
;
Тогда
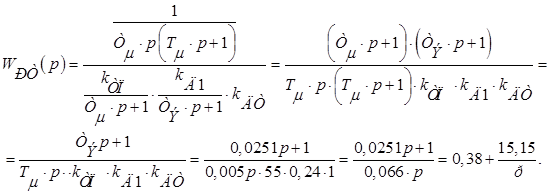
где  - пропорционально-интегральный (ПИ) регулятор. - пропорционально-интегральный (ПИ) регулятор.
Таким образом, регулятор тока – это ПИ-регулятор, который расположен до точки приложения нагрузки. Первый контур реализован на колебательной системе.
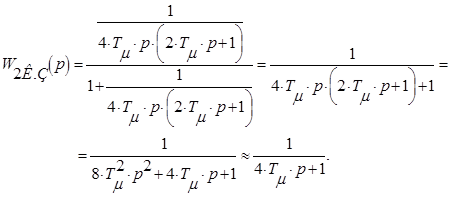
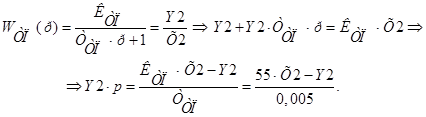
3.1.2 ОПТИМИЗАЦИЯ ВТОРОГО КОНТУРА (СИНТЕЗ РЕГУЛЯТОРА СКОРОСТИ)
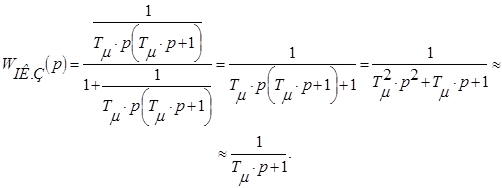
Передаточную функцию замкнутого первого контура  находим по известным правилам для нахождения передаточных функций замкнутых систем: находим по известным правилам для нахождения передаточных функций замкнутых систем:
 . .
Подставив численные значения, получим:
Синтез неизвестной неизменяемой части (регулятора скорости) производим в соответствии с методикой для контура тока:

Откуда  , ,
Находим желаемую передаточную функцию для апериодического процесса:
 , ,
где k
Д2
– коэффициент механической части двигателя:
 ; ;
k
ДС
– коэффициент передачи датчика тока, принимается k
ДС
=1
;
ТМ
– электромеханическая постоянная времени, ТМ
=0,229 с-1
;
Тμ
–малая некомпенсируемая постоянная времени, Тμ
=0,005 с-1
;
Тогда 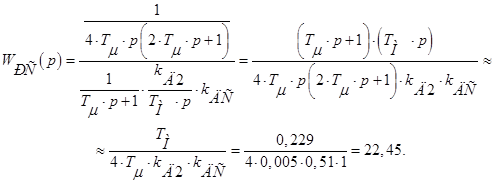
Таким образом, в процессе синтеза контура скорости мы получили структуру П регулятора. Второй контур реализован на апериодической системе первого порядка.
3.1.3 ОПТИМИЗАЦИЯ ТРЕТЬЕГО КОНТУРА (СИНТЕЗ РЕГУЛЯТОРА ПОЛОЖЕНИЯ)
Передаточную функцию замкнутого второго контура  найдём как: найдём как:
 . .
Подставив численные значения, получим:
Синтез неизвестной неизменяемой части (регулятора скорости) производим в соответствии с вышеизложенной методикой:
  , ,
Находим желаемую передаточную функцию для апериодического процесса:
 , ,
где kРС
– коэффициент передачи регулятора скорости, k=22,45;
kР
– коэффициент передачи редуктора, kР
=0,0167;
kДП
– коэффициент передачи датчика положения, принимается kДП
=1;
Тогда
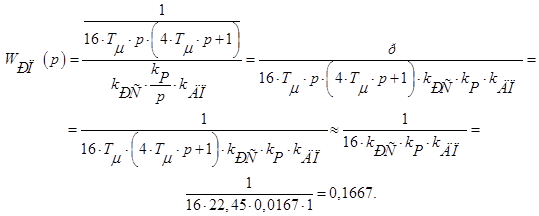
Таким образом, в процессе синтеза контура положения мы получили структуру П регулятора. Третий контур реализован на экспоненциальной системе
3.2
Составление структурной схемы в соответствии с полученным порядком астатизма
Система управления электроприводом включают регулируемый электропривод (РЭП) и следящий электропривод (СЭП), который реализуется из РЭП при организации обратной связи по положению.
СЭП используется для реализации электроприводов подач режущего инструмента или стола с обрабатываемой деталью.
В СЭП переходный процесс строится для положения рабочего органа – углового φ(t) или линейного l(t) перемещения (в 3-м контуре).
Для СЭП основным параметром является положение рабочего органа φ или l, подчиненным – скорость (ω) и ток (i).
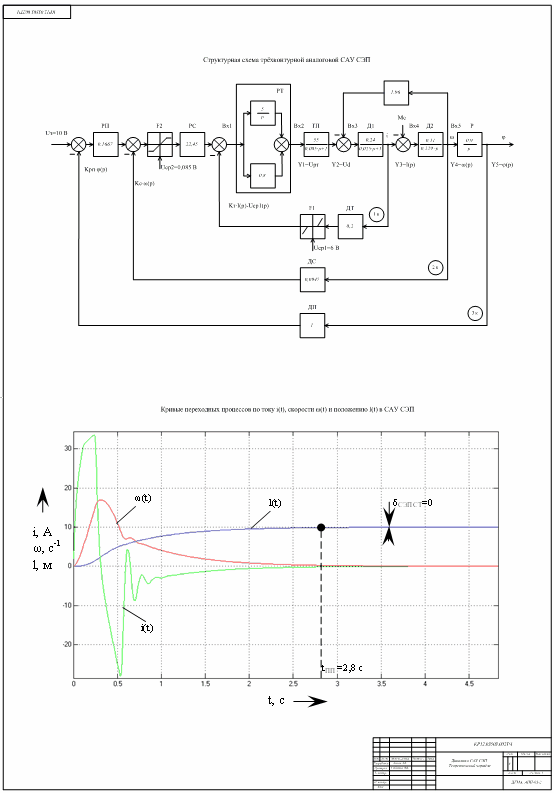
Структурная схема трёхконтурной СЭП представлена на рисунке 3.1.
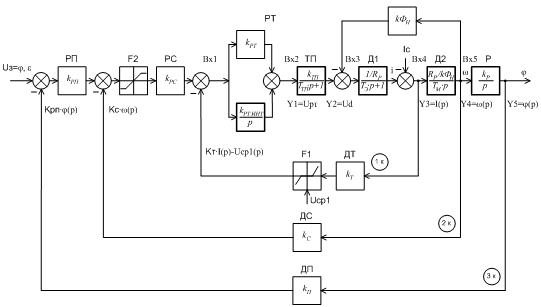
Рисунок 3.1 – Структурная схема трёхконтурной СЭП
На рисунке 3.1 приняты следующие обозначения: Вхi
– входные сигналы, Y
i
– выходные сигналы динамических звеньев; 1к, 2к, 3к
– контуры регулирования (контур тока (зона нечувствительности), контур скорости (зона насыщения) и контур положения соответственно); KТ
, КС
,КП
–коэффициенты передачи измерительных преобразователей в контурах тока, скорости и положения соответственно; РТ
- - пропорционально-интегральный регулятор тока; PC
– пропорциональный регулятор скорости; РП – пропорциональный регулятор положения.
На приведенных структурных схемах выделяются и идентифицируются динамические звенья, содержащие р
в знаменателе передаточной функции. В соответствии с этим обозначаются входные (Вхi
) и выходные (Y
i
) сигналы на этих звеньях. СЭП содержит пять входных и пять выходных сигналов.
3.3 Расчет переходных процессов
в СЭП [
i
(
t
), ω(t), φ(t) или l(t)
]
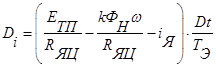
Переходный процесс по определенному параметру представляет собойграфическое решение дифференциального уравнения, описывающего движение исследуемой системы по соответствующей координате. В этойсвязи переходные процессы по току и скорости в регулируемом электроприводе могут рассчитываться на основе решения соответствующих дифференциальных уравнений, составленных на основе электрического баланса (для силы тока) и уравнения моментов (для скорости) [1]:
 . .
Это выражение представляет собой дифференциальное уравнение в приращениях для силы тока, важным параметром в котором является Э.Д.С. преобразователя Етп
, величина которой и ее поведение определяется действием соответствующих обратных связей по току и скорости. Изменение Етп
определяет характер переходного процесса.
Решение данного уравнения позволяет получить кривую изменения i(t).
Переходя к приращениям и учитывая, что LЯ
=ТЭ·
RЯ
, после соответствующих преобразований получаем:
 , ,
 , ,
 . .
После некоторых преобразований, находим:
 , ,
где J – момент инерции привода, кг·м2
.
Данное выражение представляет собой дифференциальное уравнение в приращениях для угловой скорости. Решение этого выражения позволяет получить кривую изменения угловой скорости во времени ω(t).
3.4 СОСТАВЛЕНИЕ ДИФФЕРЕНЦИАЛЬНЫХ УРАВНЕНИЙ В ФОРМЕ КОШИ И УРАВНЕНИЙ СВЯЗИ
Система дифференциальных уравнений составляется на основе структурной схемы (см. рис. 3.1). На структурной схеме входные и выходные параметры звеньев, в знаменателе передаточных функций которых содержится оператор дифференцирования р
, обозначают через Вх
i
и Y
i
с числовыми индексами.
Входным параметрам присваивается индекс, на единицу больший индекса предыдущего выходного параметра. Выходным параметрам в качестве индекса присваивается степень оператора в знаменателе передаточной функции, начиная с первого звена. В последующих звеньях индекс увеличивается на величину степени оператора р
.
Нелинейные звенья Н31 и Н32 в соответствующих контурах представляются в виде функции
Y=F(х)
.
Обозначим входные параметры звеньев через Х
. Тогда дифференциальные уравнения, записанные в форме Коши, имеют следующий вид.
1 Интегральная часть РТ:

2 Тиристорный преобразователь:
3 Электрическая часть двигателя:
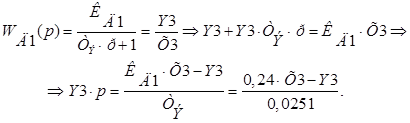
4 Механическая часть двигателя:

5. Редуктор:

Уравнения связей:
 ; ;
 ; ;
 ; ;
 ; ;
 . .
Приведенные системы дифференциальных и алгебраических уравнений полностью описывают динамику САУ ЭП и используются в расчетах переходных процессов ω(t) в астатической системе 1-го порядка.
3.5 СОСТАВЛЕНИЕ ТАБЛИЦЫ ИСХОДНЫХ ДАННЫХ
И МОДЕЛИРОВАНИЕ ДИНАМИКИ САУ СЭП
Таблица исходных данных составляется по результатам предыдущих расчетов и содержит все данные для моделирования динамики СЭП, используя прикладные программные средства MATLAB Simulink.
Исходные данные для моделирования динамики СЭП представлены в таблице 3.2.
Таблица 3.2 – Исходные данные для моделирования динамики СЭП
№
п\п
|
Параметр |
Единица
измерения
|
Значение |
Наименование
величины
|
| 1 |
tпп
|
с |
0,916 |
Время переходного процесса Т=(3…4)Тм |
| 2 |
КРС
|
- |
22,45 |
КПУ2
|
| 3 |
КРТ
|
- |
0,38 |
КПУ1
|
| 4 |
КРТ.ИНТ
|
- |
15,15 |
Коэффициент передачи интегрирующей части регулятора тока |
| 5 |
КТП
|
- |
55 |
Коэффициент передачи ТП |
| 6 |
ТТП
|
с |
0,005 |
Постоянная времени ТП |
| 7 |
КД1
|
1/Ом |
0,24 |
Коэффициент передачи Д1 - КД1
=1/RЯЦ
|
| 8 |
ТЭ
|
с |
0,0251 |
Электромагнитная постоянная |
| 9 |
КД2
|
В/рад |
0,51 |
Коэффициент передачи Д2 - КД2
= RЯЦ
/КФн
|
| 10 |
С |
Вс |
1,96 |
Коэффициент ЭДС |
| 11 |
КТ
|
В/А |
0,2 |
Коэффициент обратной связи по току |
| 12 |
КС
|
В/с-1
|
0,0947 |
Коэффициент обратной связи по скорости |
| 13 |
UЗ
|
В |
10 |
Напряжение задания 10 В 10 В |
| 14 |
Ic |
А |
2 |
Статический ток нагрузки (0,1-0,15)Iн |
| 15 |
UРТ.ИНТ
=
=Y1
|
В |
0 |
Выходное напряжение с интегрирующей части ПИ-регулятора |
| 16 |
Еп=Y2
|
В |
0 |
ЭДС ТП |
| 17 |
I=У3
|
А |
0 |
Сила тока |
| 18 |
ω=Y4
|
с-1
|
0 |
Угловая скорость |
| 19 |
l=Y5
|
м |
0 |
Положение |
| 19 |
UСР1
|
В |
6 |
Напряжение сравнения в НЗ1 |
| 20 |
UСР2
|
В |
0,085 |
Напряжение сравнения в НЗ2 |
| 21 |
КРП
|
- |
0,1667 |
КПУ3
|
| 22 |
КП
|
- |
1 |
Коэффициент ОС по положению |
| 23 |
UЗ.СЭП
|
В |
0,0195 |
Напряжение задания СЭП |
Схема САУ ЭП, составленная в программе MATHLABSimulink и предназначенная для моделирования динамики СЭП, представлена на рисунке 3.2
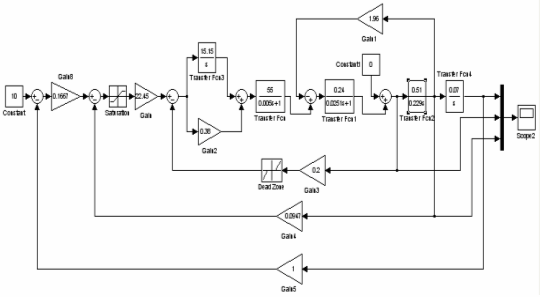
Рисунок 3.2 – Схема САУ ЭП, составленная в программе MATHLABSimulink и предназначенная для моделирования динамики СЭП
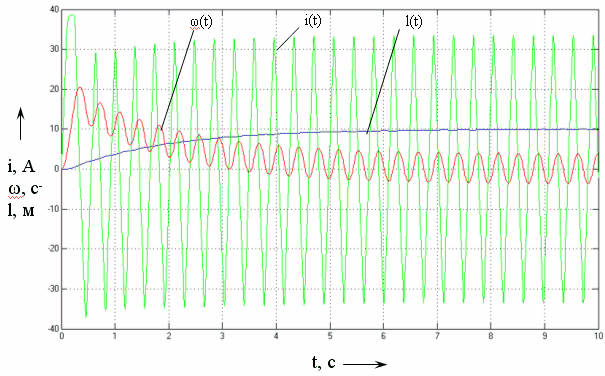
Рисунок 3.2 – Характер переходных процессов по току i(t), скорости ω(t) и положению l(t) в следящем электроприводе (СЭП)
Кривые переходных процессов силы тока i(t), угловой скорости ω(t) и положения рабочего органа l(t) в следящем электроприводе представлены на рисунке 3.3
Как видно из рисунка 3.2 характер переходных процессов по току, скорости и положению являются не совсем корректными, а именно незатухающими колебательными. Амплитуда колебаний тока и скорости достаточно велики, а амплитуда колебания положения хотя и невелика, однако достаточна для того, чтобы не удовлетворять требованиям к качественным и точностным параметрам, предъявляемым к системе. В связи с этим необходимо несколько подкорректировать значения коэффициентов изменяемой части СЭП (коэффициенты неизменяемой части корректировать нельзя), для того чтобы получить приемлемый вид переходных процессов (для контура тока – колебательный, для контура скорости – апериодический и для контура положения – экпоненциальный), которые были заданы ранее. Судя по переходному процессу по току некоторые изменения необходимо внести в ПИ регулятор (регулятор тока).
Принимаем коэффициент усиления интегральной части ПИ – регулятора КРТ.ИНТ
= 5, а коэффициент усиления пропорциональной части ПИ – регулятора КРТ
=0,8.
Кривые переходных процессов силы тока i(t), угловой скорости ω(t) и положения рабочего органа l(t) в следящем электроприводе со скорректированными коэффициентами представлены на рисунке 3.4.
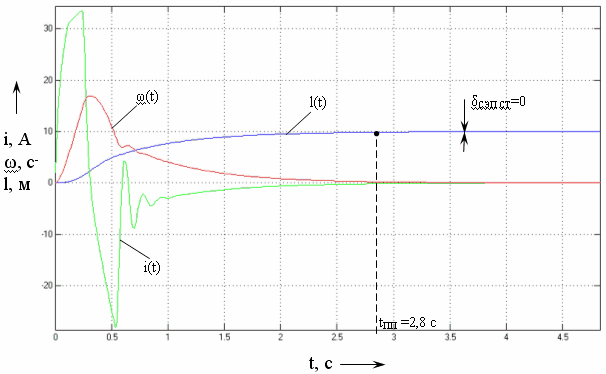
Рисунок 3.4 – Характер переходных процессов по току i(t), скорости ω(t) и положению l(t) в следящем электроприводе (СЭП) со скорректированными коэффицинтами
Кривые переходных процессов обрабатываются с целью определения временных (длительность переходных процессов) и точностных (δДИН
, δСТ
) показателей.
В соответствии с рисунком 3.4 качественные параметры СЭП составят:
Время переходного процесса: t
ПП
=2,8 с
;
Динамическая ошибка: δСЭП ДИН
=0
;
Статическая ошибка: δСЭП СТ
=0.
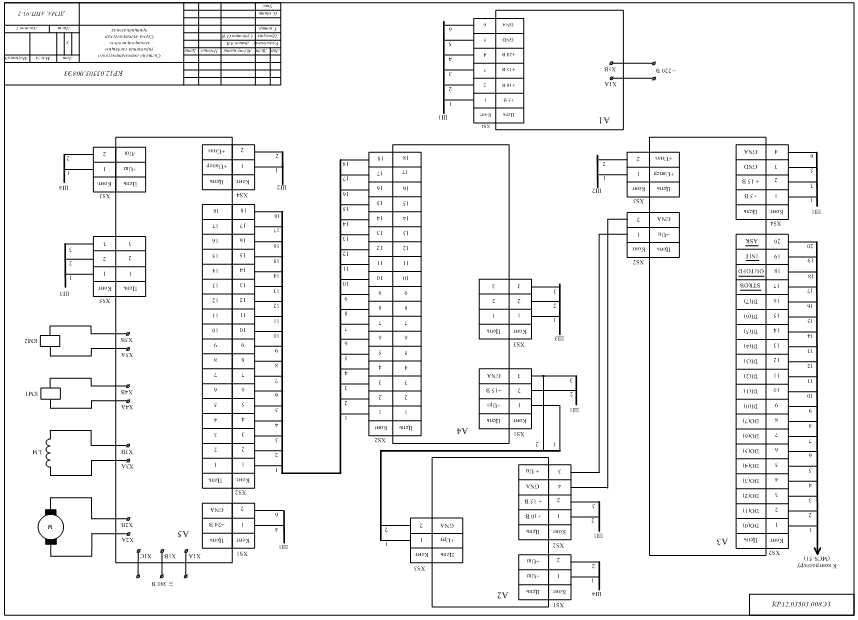
3.6 Проектирование средств сопряжения СЭП и системы управления
3.6.1 Выбор импульсного (цифрового) датчика положения
Выбор импульсного или цифрового датчика положения для осуществления передачи информации о регулируемом параметре в микропроцессорную систему производится в соответствии с таблицей Е.2 [1].
Принимаем фотоэлектрический измерительный преобразователь типа ППК-15, параметры которого приведены в таблице 3.3.
Таблица 3.3 – Параметры фотоэлектрического измерительного преобразователя типа ППК – 15
Вид
конструкции
|
Тип |
Диапазон перемещения, мм |
Разрешающая способность, имп/об (мм, разрядов) |
Габаритные размеры, мм |
Масса, кг |
Класс точности |
| Круговой |
Кодовый |
– |
15 разрядов |
70х168 |
0,85 |
2;3 |
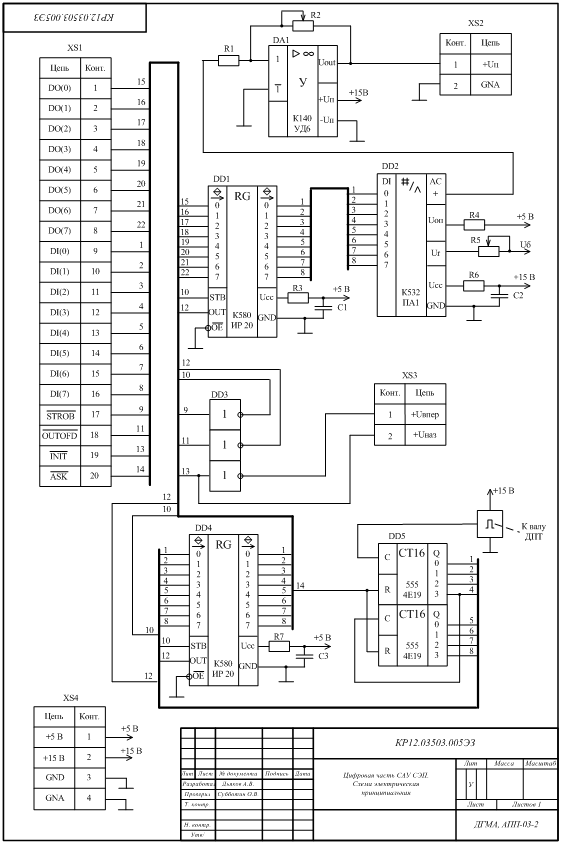
3.6.2 ВЫБОР СРЕДСТВ СОПРЯЖЕНИЯ ИЗМЕРИТЕЛЬНЫХ ПРЕОБРАЗОВАТЕЛЕЙ (ИП) С МИКРОПРОЦЕССОРНОЙ СИСТЕМОЙ (МПС)
Сигналы в САУ ЭП являются аналоговыми и имеют различную форму. ЭВМ, напротив, оперирует с сигналами строго определенными формой и уровнем. В связи с этим встает задача сопряжения, например, САУ СЭП с ЭВМ.
Из ЭВМ код задания передается на регистр-защелку, который поддерживает его постоянным на время преобразования в сигнал управления αР
.Преобразование осуществляет ЦАП. Далее сигнал поступает на регулятор тока и тиристорный преобразователь, управляющие скоростью двигателя. Скорость двигателя определяется датчиком импульсов, который преобразует скорость вращения ротора двигателя в последовательность импульсов. Количество импульсов данного сигнала подсчитывается счетчиком импульсов, который преобразует его в код NОС
и передает на регистр-защелку и далее в ЭВМ. Все операции записи-чтения синхронизируются ЭВМ. Полный цикл вычисления производится за время  – период дискретности системы. Регистры-защелки выбираем из серии К555: К555ИР20 – 8-ми разрядный регистр-защелка отображения данных, выходные буферные усилители которого имеют третье Z-состояние. – период дискретности системы. Регистры-защелки выбираем из серии К555: К555ИР20 – 8-ми разрядный регистр-защелка отображения данных, выходные буферные усилители которого имеют третье Z-состояние.
Разрядность цифро-аналогового преобразователя (ЦАП) определится:
 , ,
где l
З
- заданное значение положения (в относительных единицах);
σСЭП
- заданная статическая погрешность регулированияположения.
Согласно рассчитанному значению разрядности выбирается интегральный ЦАП типа К572ПА1, параметры которого приведены в таблице 3.4
Таблица 3.4- Характеристики интегрального ЦАП типа К572ПА1
| Число разрядов |
Время установления, мкс |
Абсолютная погрешность, % |
Опорное напряжение, В |
Напряжение источника питания, В |
Ток потребления, А |
| 10 |
5 |
±3 |
±17 |
5…17 |
2,0 |
Количество импульсов подсчитывается двумя счетчиками импульсов К555ИЕ19, работающими совместно (при выборе кодового датчика достаточно выбрать регистры). Питание К555ИЕ19 производится от напряжения 5 В. Подсчитанное количество импульсов за период дискретности Т0
счетчик преобразует в код NОС
и передает на регистр-защелку и далее в ЭВМ. Счетчик обнуляется сигналом с ЭВМ, поданным на вход R.
Реализация схемы сопряжения СЭП с цифровой системой управления приведена на рисунке 3.5.
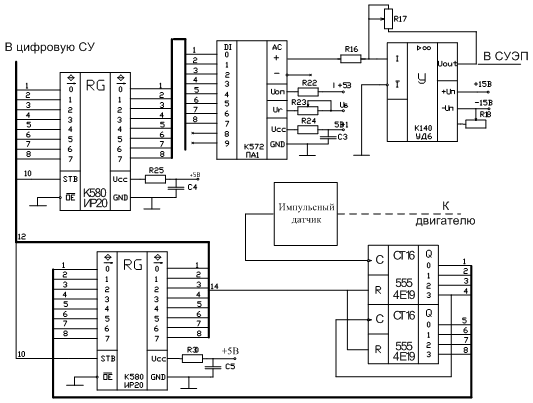
Рисунок 3.5 – Реализация схемы сопряжения СЭП с цифровой системой управления
ВЫВОДЫ
В результате проделанной работы, в соответствии с поставленной задачей, была спроектирована система автоматического управления следящим электроприводом (САУ СЭП). В ходе её исследования с помощью прикладной программы MATLABSimulink (моделирования её структуры) было установлено, что система устойчива и отвечает предъявляемым к ней требованиям, а именно: длительность переходного процесса по положению составляет 2,8 с, перерегулирование в переходном процессе по положению отсутствует (переходный процесс носит экспоненциальный характер), переходные процессы по скорости и току носят соответственно апериодический и колебательный характеры. Удовлетворительного переходного процесса удалось добиться с помощью последовательной коррекции с последующим подбором коэффициентов регуляторов, для чего была проведена структурная оптимизация САУ СЭП.
Так же была спроектирована функциональная схема САУ СЭП, в которой предусмотрена возможность управления, как от аналоговой, так и от цифровой системы управления.
СПИСОК ЛИТЕРАТУРЫ
1. Методические указания к выполнению курсового проекта по дисциплине «Автоматизированный электропривод» (для студентов специальности 7.092501)/Сост. О.В. Субботин. - Краматорск: ДГМА, 2006. – 84 с.
2. Чиликин М. Г., Сандлер А. С. Общий курс электропривода: Учебник для вузов – 6-е изд., доп. и перераб. – М.: Энергоиздат, 1981. – 576 с., ил.
3. Терещук Р.М., Терещук К. М., Седов С. А. Полупроводниковые приемно-усилительные устройства: Справочник радиолюбителя. – Киев: Наукова думка, 1981. – 680 с., ил.

|