Курсовая работа: Разработка электропривода прошивного стана трубопрокатного агрегата
|
Название: Разработка электропривода прошивного стана трубопрокатного агрегата Раздел: Рефераты по физике Тип: курсовая работа | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Содержание 1. Анализ и описание системы "Электропривод− рабочая машина" 1.1 Количественная оценка вектора состояния или тахограммы требуемого процесса движения 1.2 Количественная оценка моментов и сил сопротивления 1.3 Составление расчетной схемы механической части электропривода 1.4 Построение нагрузочной диаграммы и механической характеристики рабочей машины 2. Анализ и описание системы "электропривод−сеть" и "электропривод−оператор" 3. Выбор принципиальных решений 3.1 Построение механической части электропривода 4. Расчет силового электропривода 4.1 Расчет параметров и выбор электродвигателя 4.2 Расчет параметров и выбор силовых преобразователей 5. Расчет статических механических и электромеханических характеристик двигателя и привода 6. Расчет переходных процессов в электроприводе за цикл работы 6.1 Обоснование перехода к одно-массовой расчетной схеме 6.2 Расчет регуляторов и параметров структурной схемы 6.3 Расчет переходных процессов 7. Проверка правильности расчета мощности и окончательный выбор двигателя 8. Разработка схемы электрической принципиальной
|
 ,
,
 м,
м, кг*м2
;
кг*м2
; Н*м/рад;
Н*м/рад; ;
; кг*м2
;
кг*м2
;
 Н*м/рад;
Н*м/рад; ;
; ;
;
| Тип привода. | |
| ДПТ-УВ | 150,5 |
| Г-Д | 132,5 |
| АД-ПЧ | 148 |
| СД-ПЧ | 123 |
| К | 111 |
Оценочная диаграмма.
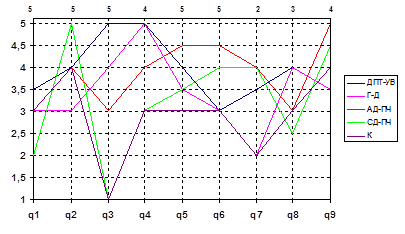
Рисунок 3.1− Оценочная диаграмма
Таблица 3.1- Критерии оценки
| q1 | Стоимость системы |
| q2 | КПД и cosф системы |
| q3 | Применяемость в промышленности |
| q4 | Наличие литературы и возможность получения сведений о системе, мои знания |
| q5 | Надежность |
| q6 | Перспективность |
| q7 | Массогабаритные показатели |
| q8 | Ремонтопригодность |
| q9 | Эксплуатационные расходы |
Таким образом выбираем вариант ДПТ−УВ.
4. Расчет силового электропривода
4.1 Расчет параметров и выбор электродвигателя
Оценить потери в двигателе можно методом средних потерь. Однако для применения этого метода необходимо знать зависимость коэффициента полезного действия двигателя от мощности на валу:![]() ; (4.1)
; (4.1)
В соответствии с формулой (4.1) потери можно определить методом эквивалентного тока, но для этого необходимо значение тока двигателя при различных нагрузках.
Очевидно, что вышеупомянутые два метода можно применять как проверочные.
Так как по условию ![]() , то в двигателе постоянного тока необходимо управление "по якорю", тогда возбуждение двигателя остается постоянным, и, следовательно:
, то в двигателе постоянного тока необходимо управление "по якорю", тогда возбуждение двигателя остается постоянным, и, следовательно: ![]() ; (4.2)
; (4.2)
Тогда можно применять метод эквивалентного момента, а так как скорость за цикл должна оставаться постоянной, то даже можно применять метод эквивалентной мощности, но воспользуемся методом эквивалентного момента.
В обще виде:
 ; (4.3)
; (4.3)
Интеграл можно заменить суммой:
 ; (4.4)
; (4.4)
Воспользовавшись рисунком 1.4, запишем выражение для ![]() :
:
![]() Н*м;
Н*м;
Предварительно посмотрев справочную литературу по металлургическим электродвигателям за номинальную скорость двигателя принимаем ![]() об/мин. тогда угловая скорость равна:
об/мин. тогда угловая скорость равна:
![]() рад/с. (4.5)
рад/с. (4.5)
Тогда требуемая мощность двигателя может быть вычислена по следующей формуле:
![]() Вт. (4.6)
Вт. (4.6)
При расчете эквивалентного момента не учитывалось ухудшение охлаждения двигателя при работе на пониженных скоростях в связи с тем, что двигатели такой мощности оснащаются независимым вентилятором типа "наездник".
Исходя из вышесказанного, принимаем двух двигательный привод. Двигатели работают на общий вал, и включены в цепь последовательно для обтекания одним током и, соответственно, для одинаковой загрузки.
Выбираем двигатели постоянного тока МСП 300-1210 Т. Основные требуемые для расчета данные электродвигателя следующие:
Номинальная мощность электродвигателя: ![]() Вт;
Вт;
Номинальное напряжение питания якоря: ![]() В;
В;
Коэффициент перегрузки по току: ![]() ;
;
Номинальная скорость вращения: ![]() об/мин; тогда соответственно по формуле 4.5 имеем:
об/мин; тогда соответственно по формуле 4.5 имеем:
![]() рад/с.
рад/с.
Номинальный ток якоря: ![]() А; сопротивления обмотки якоря (все сопротивления даны для температуры 150
С):
А; сопротивления обмотки якоря (все сопротивления даны для температуры 150
С): ![]() Ом; сопротивление обмотки дополнительных полюсов:
Ом; сопротивление обмотки дополнительных полюсов: ![]() Ом; сопротивление компенсационной обмотки:
Ом; сопротивление компенсационной обмотки: ![]() Ом; сопротивление обмотки возбуждения:
Ом; сопротивление обмотки возбуждения: ![]() Ом; напряжение обмотки возбуждения:
Ом; напряжение обмотки возбуждения: ![]() В; количество пар полюсов:
В; количество пар полюсов: ![]() ; момент инерции якоря
; момент инерции якоря ![]() кг*м2
; падение напряжения на щетках одного двигателя:
кг*м2
; падение напряжения на щетках одного двигателя: ![]() В; соотношение
В; соотношение ![]() , следовательно, по перегрузочной способности двигатель подходит.
, следовательно, по перегрузочной способности двигатель подходит.
4.2 Расчет параметров и выбор силовых преобразователей
Исходя из требуемого напряжения питания двигателей (напряжение удвоенное в связи с последовательным соединением якорных обмоток) и расчетной мощности выбираем трансформатор: ТМНПД-5000/10 У2; исполнение 5, соединение обмоток ![]() .
.
Паспортные данные трансформатора:
Номинальная полная мощность трансформатора: ![]() ВА;
ВА;
Потери холостого хода: ![]() Вт;
Вт;
Потери короткого замыкания: ![]() Вт;
Вт;
Напряжение первичной обмотки: ![]() В;
В;
Напряжение вторичной обмотки: ![]() В;
В;
Напряжение короткого замыкания: ![]() %;
%;
Номинальная частота сети: ![]() Гц,
Гц, ![]() рад/с.
рад/с.
Рассчитаем параметры трансформатора:
Номинальный фазный ток вторичной обмотки:
 А; (4.7)
А; (4.7)
Активное сопротивление фазы вторичной обмотки:
 Ом; (4.8)
Ом; (4.8)
Полное сопротивление фазы вторичной обмотки трансформатора:
 Ом; (4.9)
Ом; (4.9)
Индуктивное сопротивление фазы вторичной обмотки:
![]() Ом; (4.10)
Ом; (4.10)
Индуктивность фазы вторичной обмотки:
![]() Гн; (4.11)
Гн; (4.11)
Так же, исходя из вышеописанных соображений, выбираем тиристорный преобразователь ТПП1.
Паспортные данные преобразователя и некоторые данные для дальнейшего расчета:
Реверсивный;
Изготовлен по мостовой 6-ти пульсной схеме ![]() ;
;
Номинальное выпрямленное напряжение преобразователя: ![]() В;
В;
Номинальный выпрямленный ток: ![]() А;
А;
Падение напряжения на вентилях: ![]() В;
В;
Коэффициент запаса по току: ![]() ;
;
Коэффициент схемы по току: ![]() ;
;
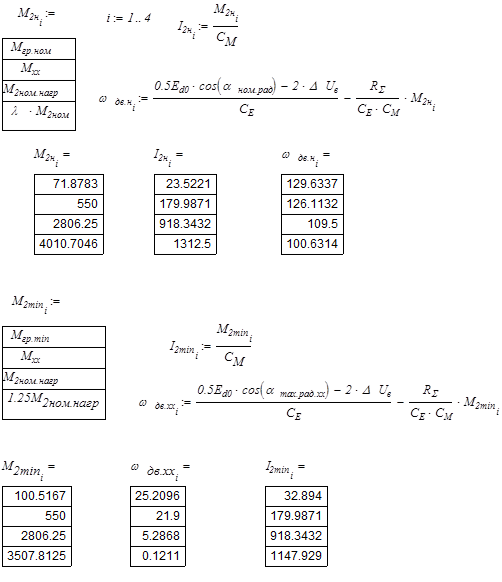
5. Расчет статических механических и электромеханических характеристик двигателя и привода
Все расчеты будут проведены для одного двигателя исходя их тех предположений, что напряжение распределяется по якорным обмоткам равномерно, ток общий, момент- одинаковый. Нагрузка на один двигатель принимается половиной от общей: ![]() Н*м,
Н*м, ![]() Н*м, номинальная скорость двигателя
Н*м, номинальная скорость двигателя ![]() рад/с.
рад/с.
Приведем сопротивления к рабочей температуре:
Коэффициент приведения равен:
![]() ; (5.1),
; (5.1), ![]() ;
;
где![]() 0
С- температура, при которой дано сопротивление обмоток двигателя в паспортных данных;
0
С- температура, при которой дано сопротивление обмоток двигателя в паспортных данных;
![]() 0
С- рабочая температура двигателя с классом изоляции В.
0
С- рабочая температура двигателя с классом изоляции В.
Сопротивление якорной обмотки без учета падения напряжения на щетках:
![]() ; (5.2),
; (5.2), ![]() Ом;
Ом;
Полное сопротивление якорной цепи двигателя:
![]() Ом; (5.3)
Ом; (5.3)
Индуктивность якорной цепи (по формуле Ленвиля-Уманского):
![]() Гн, (5.4)
Гн, (5.4)
где![]() - эмпирический коэффициент (при наличии компенсационной обмотки).
- эмпирический коэффициент (при наличии компенсационной обмотки).
Максимальная ЭДС преобразователя:
![]() ; (5.5),
; (5.5), ![]() ;
;
Ориентировочно оценим минимальное требуемое значение ЭДС преобразователя, учитывая диапазон ![]() :
:
![]() ; (5.6)
; (5.6)
Найдем требуемую индуктивность сглаживающего дросселя из условия максимально-допустимых пульсаций тока нагрузки, равных 5%, ![]() :
:
Максимальный (ориентировочно) угол управления:
 рад; (5.7)
рад; (5.7)
Коэффициент для мостовой схемы:
![]() ; (5.8),
; (5.8), ![]() ;
;
Требуемое индуктивное сопротивление сглаживающего дросселя:
![]() ; (5.9)
; (5.9)
![]() Гн; (5.10)
Гн; (5.10)
Выбираем сглаживающий дроссель СРОС3-800МУХЛ4, его паспортные данные:
Номинальный ток дросселя: ![]() А;
А;
Номинальное сопротивление дросселя: ![]() Гн.
Гн.
Номинальные потери в меди дросселя: ![]() Вт;
Вт;
Ставим последовательно 2 дросселя: ![]() .
.
Суммарная индуктивность сглаживающего дросселя:
![]() Гн; (5.11)
Гн; (5.11)
Суммарное активное сопротивление сглаживающего дросселя:
 Ом; (5.12)
Ом; (5.12)
Эквивалентное сопротивление коммутации:
![]() Ом; (5.13)
Ом; (5.13)
Полное эквивалентное сопротивление якорной цепи одного двигателя:
![]() ; (5.14)
; (5.14)
![]() Ом;
Ом;
Полная индуктивность якорной цепи (учитывая, что вторичная обмотка трансформатора соединена в треугольник и используется мостовая схема, которая "работает" с линейными напряжениями, а, следовательно, ток нагрузки течет только по одной из обмоток трансформатора):
![]() ; (5.15)
; (5.15)
![]() Гн;
Гн;
Определим конструктивный коэффициент двигателя, связывающий противоЭДС и скорость вращения вала двигателя:
![]() ; (5.16)
; (5.16)
![]() В*с/рад;
В*с/рад;
Момент на валу, развиваемый электродвигателем:
![]() Н*м; (5.17)
Н*м; (5.17)
Электромагнитный момент двигателя:
![]() Н*м; (5.18)
Н*м; (5.18)
Найдем относительную разницу между электромагнитным моментом и моментом на валу:
![]() ; (5.19)
; (5.19)
Так как разница более 5%, то для дальнейших расчетов найдем конструктивный коэффициент двигателя, связывающий момент на валу двигателя и с током якоря:
![]() Н*м/А; (5.20)
Н*м/А; (5.20)
Угол управления при номинальной скорости и номинальной нагрузке:
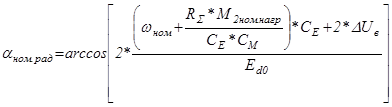 ; (5.21)
; (5.21)
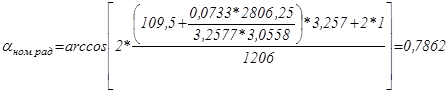 рад;
рад;
![]() о
; (5.22)
о
; (5.22)
Угол управления при минимальной скорости и номинальной нагрузке:
 ; (5.23)
; (5.23)
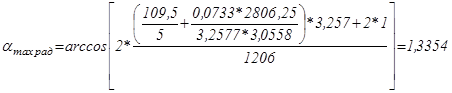 рад;
рад;
![]() о
;
о
;
Угол управления при номинальной скорости и нагрузке холостого хода:
 ; (5.24)
; (5.24)
 рад;
рад;
![]() о
;
о
;
Угол управления при минимальной скорости и минимальной нагрузке:
 ; (5.25)
; (5.25)
 рад;
рад;
![]() о
;
о
;
Очевидно, что максимальный угол управления в установившемся режиме соответствует ![]() о
, а минимальный угол управления соответствует
о
, а минимальный угол управления соответствует ![]() о
. Найдем граничные токи и соответственно моменты для двух этих углов:
о
. Найдем граничные токи и соответственно моменты для двух этих углов:
Для ![]() (номинальная скорость и номинальная нагрузка):
(номинальная скорость и номинальная нагрузка):
 ; (5.26)
; (5.26)
 ;
;
![]() А;
А;
![]() Н*м;
Н*м;
Для ![]() (минимальная скорость, нагрузка холостого хода):
(минимальная скорость, нагрузка холостого хода):
 ; (5.26)
; (5.26)
 ;
;
![]() А;
А;
![]() Н*м;
Н*м;
Очевидно, что в статике режим прерывистых токов отсутствует при изменении нагрузок и скоростей в пределах, соответствующих заданию.
Далее рассчитаем и построим механические и электромеханические характеристики привода в разомкнутом состоянии:
Зону непрерывных токов в принципе можно было строить по 2-м точкам (![]() или
или ![]() ) и (
) и (![]() или
или ![]() ) но мы возьмем для наглядность несколько точек.
) но мы возьмем для наглядность несколько точек.
Зададимся 4-мя значениями момента. ![]() . Тогда скорость двигателя для угла управления
. Тогда скорость двигателя для угла управления ![]() будет равна:
будет равна:
![]() ; (5.27)
; (5.27)
![]() ;
;
![]() ;
;
Результаты расчетов и графики находятся в приложении А.
Скорость двигателя для угла управления ![]() будет равна:
будет равна:
![]() ; (5.28)
; (5.28)
![]() ;
;
![]() ;
;
Результаты расчетов и графики находятся так же в приложении А.
Зону прерывистых токов рассчитаем так же по точкам. Зададимся 10-ю значениями ![]() . Значения углов занесены в массив
. Значения углов занесены в массив ![]() Расчеты будут производится для тех же двух углов управления, что и предыдущие. Тогда ток, момент и скорость двигателя в зоне прерывистых токов будут равны:
Расчеты будут производится для тех же двух углов управления, что и предыдущие. Тогда ток, момент и скорость двигателя в зоне прерывистых токов будут равны:
 ; (5.29)
; (5.29)
![]() ;
;
![]() ; (5.30)
; (5.30)
 ; (5.31)
; (5.31)
 ;
;
Результаты расчетов и графики находятся так же в приложении А.
Характеристики замкнутой системы будут абсолютно жесткие, что будет показано далее.
Говоря по-хорошему, сопротивление ![]() в режиме прерывистых токов меньше сопротивления в режиме непрерывных токов на величину сопротивления коммутации. Однако, в этом случае будет разрыв характеристик в граничной точке. Так же, если говорить точнее, то сопротивление коммутации изменяется с изменением тока нагрузки так же как и эквивалентное сопротивление щеточного контакта. Тогда в режиме непрерывных токов с уменьшение тока нагрузки и становится равным нулю при граничном токе. Однако в этом случае двигатель механическая характеристика двигателя в режиме непрерывных токов становится нелинейной. Следовательно, оставим сопротивления
в режиме прерывистых токов меньше сопротивления в режиме непрерывных токов на величину сопротивления коммутации. Однако, в этом случае будет разрыв характеристик в граничной точке. Так же, если говорить точнее, то сопротивление коммутации изменяется с изменением тока нагрузки так же как и эквивалентное сопротивление щеточного контакта. Тогда в режиме непрерывных токов с уменьшение тока нагрузки и становится равным нулю при граничном токе. Однако в этом случае двигатель механическая характеристика двигателя в режиме непрерывных токов становится нелинейной. Следовательно, оставим сопротивления ![]() одинаковым в режиме прерывистых и непрерывных токов.
одинаковым в режиме прерывистых и непрерывных токов.
6. Расчет переходных процессов в электроприводе за цикл работы
6.1 Обоснование перехода к одно-массовой расчетной схеме
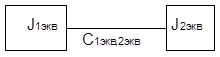
Приведение расчетной схемы к двух-массовой приведено в подразделе 1.3 рисунок 1.5 Найдем собственную частоту колебаний двух-массовой расчетной схемы:
![]() кг*м2
; (6.1)
кг*м2
; (6.1)
![]() кг*м2
; (6.2)
кг*м2
; (6.2)
 с-1
; (6.3)
с-1
; (6.3)
Основанием для перехода к одно-массовой расчетной схеме сводится к нижеследующему неравенству:
![]() ; (6.4)
; (6.4)
Настройку внутреннего контура тока будем производить на модульный оптимум, а внешнего контора скорости- на симметричный в связи с потребностью получения абсолютно жестких характеристик. Из курса ТАУ известно, что ЛАЧХ разомкнутого контура скорости при настройке на симметричный оптимум имеет вид, как показано на рисунке 6.1.

Рисунок 6.1- ЛАЧХ разомкнутого контура скорости
Коэффициент ![]() для этого случая равен:
для этого случая равен:
 .
. ![]() , это
, это
будет показано позднее. Нетрудно определить путем элементарных математических преобразований желаемую частоту среза.
![]() с-1
;
с-1
;
Условие перехода к одно-массовой расчетной схеме выполняется.
![]() ;
;
![]() ;
;
Тогда приведенный момент инерции равен:
![]() кг*м2
; (6.5).
кг*м2
; (6.5).
6.2 Расчет регуляторов и параметров структурной схемы
В данном конкретном случае система подчиненного регулирования состоит из двух контуров: контура скорости и контура тока. Запишем систему дифференциальных уравнений в операторной форме для двигателя постоянного тока с независимым возбуждением при регулировании напряжения по обмотке якоря.
 (6.6)
(6.6)
Тогда передаточные функции элементов схемы примут вид:
![]() ;
; ![]() ; (6.7)
; (6.7)
![]() ;
;
![]() ,
,
где![]() −передаточная функция блока электрической части структурной схемы;
−передаточная функция блока электрической части структурной схемы;
![]() − передаточная функция блока электромеханической части структурной схемы;
− передаточная функция блока электромеханической части структурной схемы;
![]() − передаточная функция блока механической части структурной схемы;
− передаточная функция блока механической части структурной схемы;
![]() −передаточная функция, учитывающая влияние внутренней обратной связи двигателя по противо-ЭДС.
−передаточная функция, учитывающая влияние внутренней обратной связи двигателя по противо-ЭДС.
При синтезе регуляторов пренебрегаем внутренней электромеханической обратной связью двигателя. Структурная схема контура тока изображена на рисунке 6.2.
 |
Рисунок 6.2
Контур тока будем настраивать на модульный оптимум согласно методике, изложенной в курсе ТАУ. В виде малой некомпенсируемой постоянной времени выбираем постоянную времени тиристорного преобразователя ![]() .
.
Так как настройка производится на модульный оптимум, то передаточная функция регулятора тока в общем случае будет иметь следующий вид:
![]() , (6.8)
, (6.8)
где![]() −коэффициент демпфирования контура тока;
−коэффициент демпфирования контура тока;
![]() −передаточная функция объекта компенсации:
−передаточная функция объекта компенсации:
![]() , (6.9)
, (6.9)
где![]() −передаточная функция разомкнутого контура тока без учета регулятора тока;
−передаточная функция разомкнутого контура тока без учета регулятора тока;
![]() ;
;
 ;
;
 ;
;
![]() ; (6.10)
; (6.10)
Таким образом, очевидно, что регулятор тока представляет собой пропорционально интегрирующий (ПИ) регулятор.
Передаточная функция замкнутого контура тока имеет следующий вид:
 ; (6.11)
; (6.11)
Настройку регулятора скорости будем производить по симметричному оптимуму. Контур, настроенный по симметричному оптимуму, исходя из теории, изначально является двукратно замкнутым, причем "первый" контур настраивается по модульному оптимуму. Следовательно, вначале следует провести оптимизацию контура скорости по модульному оптимуму. Структурная схема контура скорости для этого случая представлена на рисунке 6.3.

Рисунок 6.3−Контур скорости с настройкой по модульному оптимуму
Статический момент нагрузки учитываться не будет, так как ![]() и на динамику влияния оказывать не будет.
и на динамику влияния оказывать не будет.
Исходя из структурной схемы, передаточная функция объекта компенсации имеет следующий вид:
 ; (6.12)
; (6.12)
Передаточная функция регулятора скорости, настроенного по модульному оптимуму, имеет следующий вид:
![]() ; (6.13)
; (6.13)
 , (6.14)
, (6.14)
где![]() −коэффициент демпфирования контура скорости.
−коэффициент демпфирования контура скорости.
Для получения симметричного оптимума сделаем систему двукратно замкнутой, добавив дополнительное звено ![]() в прямую цепь, где
в прямую цепь, где ![]() −коэффициент демпфирования контура скорости при настройке по симметричному оптимуму.
−коэффициент демпфирования контура скорости при настройке по симметричному оптимуму.
Полученная структурная схема изначально имеет вид, изображенный на рисунке 6.4.
 |
Рисунок 6.4− Контур скорости с настройкой по симметричному оптимуму (изначально)
Переносим сумматор №1 к сумматору №2 по правилам преобразования структурных схем и объединяем обратные связи, в результате получаем структурную схему, изображенную на рисунке 6.5:

Рисунок 6.5− Контур скорости с настройкой по симметричному оптимуму (преобразования)
Далее оставляем в звене обратной связи лишь ![]() , а оставшуюся часть переносим через сумматор.
, а оставшуюся часть переносим через сумматор.
Полученная структурная схема изображена на рисунке 6.6.

Рисунок 6.6−Контур скорости, настроенный по симметричному оптимуму
Из полученной структурной схемы можно записать передаточную функцию регулятора скорости, настроенного по симметричному оптимуму:
 (6.15)
(6.15)
Очевидно, что полученный регулятор является пропорционально интегральным (ПИ). Запишем передаточную функцию замкнутого контура скорости:
 (6.16)
(6.16)
Это передаточная функция без учета фильтра с передаточной функцией ![]() , а с учетом оного, передаточная функция будет иметь следующий вид:
, а с учетом оного, передаточная функция будет иметь следующий вид:
![]() (6.17)
(6.17)
При построении структурной модели учтем, что в реальной системе на выходе с регуляторов, представленных, как правило, операционным усилителем, и тиристорного преобразователя нельзя получить напряжение, больше, порогового значения. Это учитывается путем введения в систему нелинейность типа "ограничение". Структурная модель изображена на рисунке 6.7.
Для ограничения максимально допустимого тока двигателя, а, следовательно, и момента в динамике и в статике. Сделаем это следующим образом:

При условии ![]() В на входе регулятора тока будет нулевое напряжение. Однако
В на входе регулятора тока будет нулевое напряжение. Однако ![]() , т.е. ограничивая
, т.е. ограничивая ![]() , подбирая требуемый
, подбирая требуемый
![]() .
. ![]() А,
А,
Тогда ![]() В/А.
В/А.
Докажем, что механические характеристики замкнутой системы являются абсолютно жесткими. Для статического режима можно записать:
 ; (6.18)
; (6.18)
Тогда для статики ![]() , следовательно
, следовательно ![]() . Очевидно, что скорость не зависит от момента.
. Очевидно, что скорость не зависит от момента.
6.3 Расчет переходных процессов
Расчет переходных процессов за цикл работы выполнен при помощи пакета Matlab 5.0. Структурная схема модели приведена на рисунке 6.7.
Рассчитаем параметры системы:
![]() Ом−полное эквивалентное сопротивления якорной цепи, приходящееся на один двигатель;
Ом−полное эквивалентное сопротивления якорной цепи, приходящееся на один двигатель;
![]() мГн− полная индуктивность якорной цепи, приходящаяся на один двигатель;
мГн− полная индуктивность якорной цепи, приходящаяся на один двигатель;
![]() кг*м2
− суммарный момент инерции привода, приведенный к скорости вала двигателя;
кг*м2
− суммарный момент инерции привода, приведенный к скорости вала двигателя;
![]() −конструктивный коэффициент, связывающий скорость двигателя с противо-ЭДС;
−конструктивный коэффициент, связывающий скорость двигателя с противо-ЭДС;
![]() −конструктивный коэффициент, связывающий ток якорной цепи двигателя с моментом на валу;
−конструктивный коэффициент, связывающий ток якорной цепи двигателя с моментом на валу;
![]() −коэффициент усиления тиристорного преобразователя;
−коэффициент усиления тиристорного преобразователя;
![]() с−суммарная эквивалентная постоянная времени тиристорного преобразователя;
с−суммарная эквивалентная постоянная времени тиристорного преобразователя;
![]() В/А− коэффициент передачи датчика тока;
В/А− коэффициент передачи датчика тока;
![]() В*с−коэффициент передачи датчика скорости;
В*с−коэффициент передачи датчика скорости;
Далее произведем расчет оставшихся необходимых значений:
![]() с−электромагнитная постоянная времени якорной цепи двигателя постоянного тока;
с−электромагнитная постоянная времени якорной цепи двигателя постоянного тока;
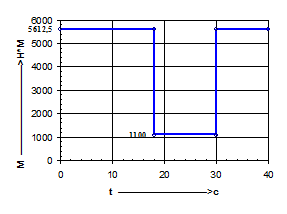
Нагрузка в виде момента холостого хода, приходящаяся на один двигатель, равна: ![]() Н*м.
Н*м.
Нагрузка в виде момента прокатки, приходящаяся на один двигатель, равна: ![]() Н*м.
Н*м.
Параметры регуляторов:
![]() ;
;
![]() ;
;

 .
.
Задающие воздействие для номинальной скорости 10 В, для минимальной скорости 2 В. Задание осуществляется при помощи задающего резистора.
7. Проверка правильности расчета мощности и окончательный выбор двигателя
Для проверки двигателя по нагреву воспользуемся методом эквивалентного тока, описанного в разделе №4. Этот метод можно применять вместо метода средних потерь, так как: двигатель работает с постоянством потока, следовательно, "постоянные" потери принимаем постоянными, а "переменные" активные потери, которые нагревают двигатель, при условии постоянства сопротивления якорной цепи полностью пропорциональны квадрату тока якорной цепи.
Формула, которой можно воспользоваться в этом случае выглядит следующим образом:
 ;
;
Для обеспечения точного подсчета в структурной схеме модели возьмем ток якоря, перемножим его на самого себя, проинтегрируем, разделим на время цикла (30 с) и извлечем корень. Получено значение эквивалентное значение тока, равное:
![]() А.
А.
Номинальный ток двигателя равен: ![]() А, тогда соответственно загрузка двигателя составляет:
А, тогда соответственно загрузка двигателя составляет:
![]() .
.
Двигатель загружен на 96,2%, следовательно, двигатель выбран правильно.
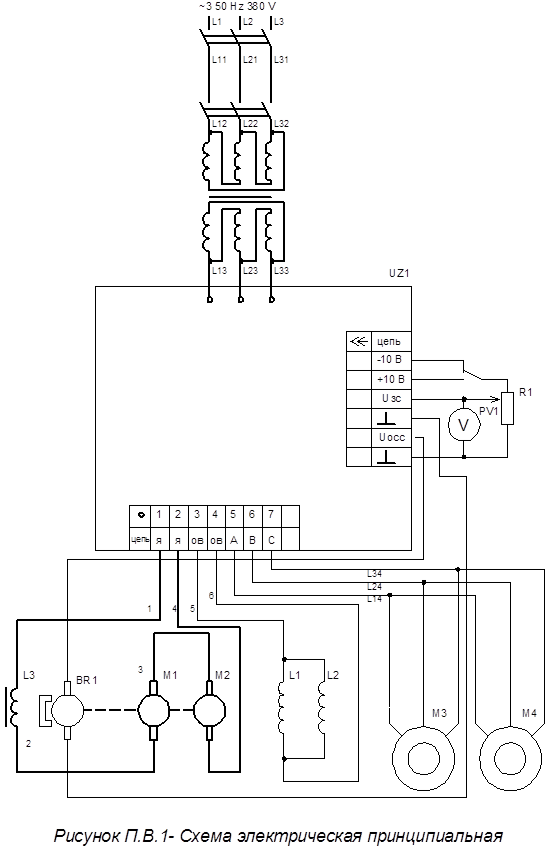
8. Разработка схемы электрической принципиальной
Разработаем схему электрическую принципиальную. Подключение к промышленной сети напряжением 6,3 кВ, частотой 50 Гц будет осуществляться при помощи автоматического выключателя с защитой от короткого замыкания и защитой от перегрузок. Выбираем автоматический выключатель МГГ-6,3-3150-45У3, ГОСТ 687-78. Напряжение подается па понижающий трансформатор TV1. С него напряжение подается на управляемый выпрямитель UZ1, к которому подключены последовательно оба двигателя. На валу двигателей так же находится тахогенератор, поставляемый в комплекте с двигателями. Обмотки возбуждения подключаются параллельно к специальным выводам управляемого выпрямителя. Так же к специальным выводам подключается привод независимого вентилятора (асинхронный 3-х фазный двигатель с КЗ ротором на Uф =220 В). Схема электрическая принципиальная находится в приложении В.
Заключение
В процессе выполнения курсового проекта были выполнены все пункты задания по курсовому проектированию. Был спроектирован привод прошивного стана трубопрокатного агрегата ан основе привода постоянного тока системы "УВ-Д". В электроприводе использованы два двигателя, которые обеспечивают: во-первых, почти полную загрузку двигателей; во-вторых, получаем меньше суммарный момент инерции системы.
Список литературы
1. Теория электрического привода. Методические указания по курсовому проектированию Часть I. Могилев: ММИ, 1991,-65с.
2. Справочник по автоматизированному электроприводу/ Под ред. В.А. Елисеева и А.В. Шинянского. - М.: Энергоатомиздат, 1983. - 616 с.
3. Ключев В.И. Теория электропривода: Учебник для вузов. - М.: Энергоатомиздат, 1985. - 550 с.
4. Комплектные тиристорные преобразователи / Под ред. В.М. Перельмутера. М.: Энергоатомиздат. 1988. - 318 с.
5. Конспект лекций и практических занятий по курсу ТЭП / Под ред. Слуки М.П. и Скарыно Б.Б. - Могилев: Самиздат. 2000. сколько страниц не считал (почти три общих тетрадки).
Приложения
Приложение А
Расчет характеристик выполнен в программе Mathcad2000.
Построение механической характеристики для углов управления ![]() и
и ![]() :
:
Расчет
зоны прерывистых токов для углов управления ![]() и
и ![]() :
:
Графики механической и электромеханической характеристик в зоне прерывистых токов:
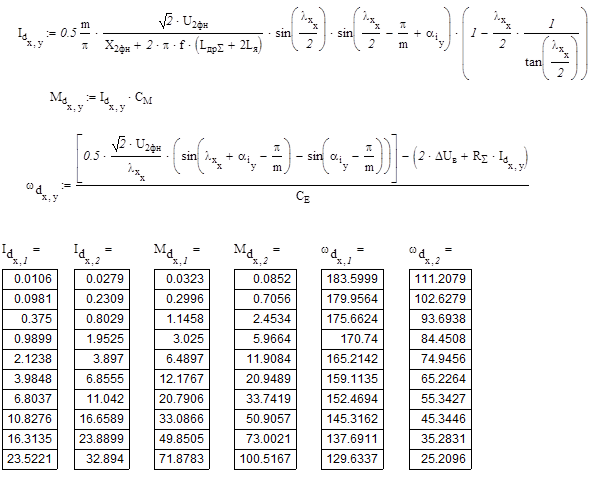
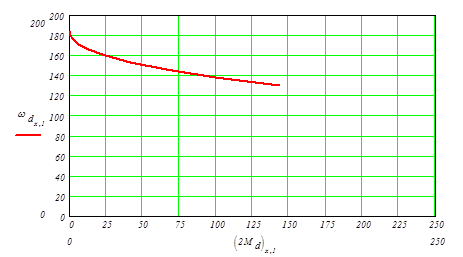
Рисунок П. А.1- Механическая характеристика (для двух двигателей вместе) в зоне прерывистых токов для угла управления ![]()
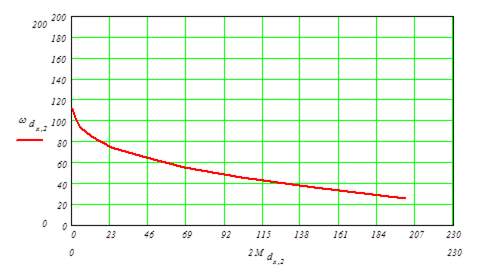
Рисунок П. А.2- Механическая характеристика (для двух двигателей вместе) в зоне прерывистых токов для угла управления ![]()
Рисунок П. А.3- Электромеханическая характеристика в зоне прерывистых токов для угла управления ![]()
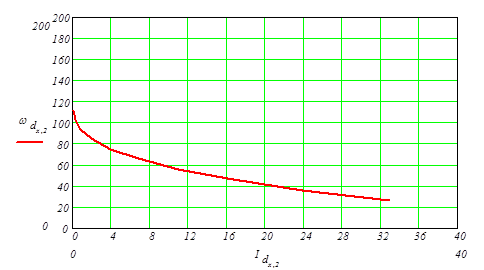
Рисунок П. А.4- Электромеханическая характеристика в зоне прерывистых токов для угла управления ![]()
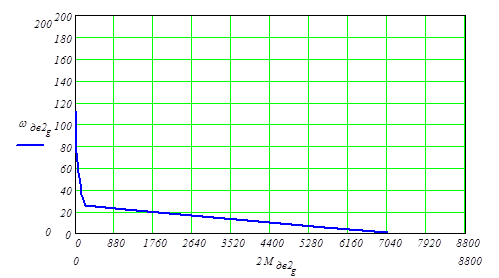
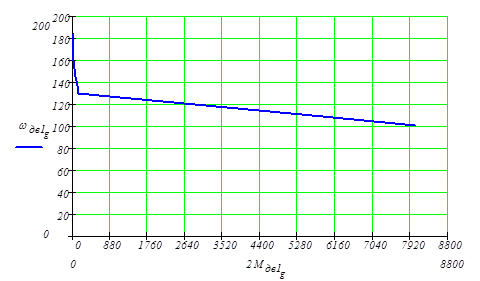
Рисунок П. А.5- Механическая характеристика (для двух двигателей вместе) для угла управления![]()
Рисунок П. А.6- Механическая характеристика (для двух двигателей вместе) для угла управления![]()
Электромеханическая характеристика (для двух двигателей вместе) выглядит аналогично, но с другим масштабом по оси абсцисс.
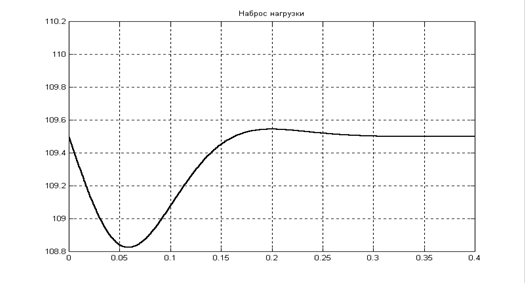
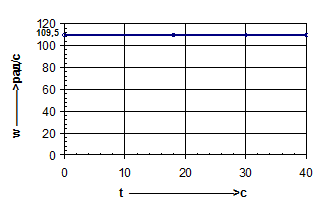
Рисунок П. Б.1- График скорости при набросе нагрузки
Расчет характеристик выполнен в программе Matlab5.0.
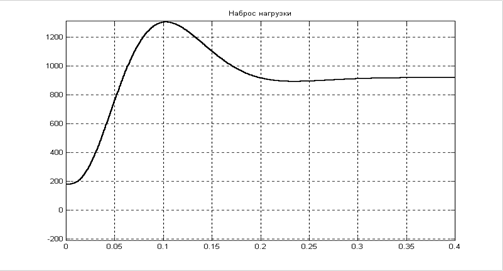
Рисунок П. Б.2- График тока при набросе нагрузки
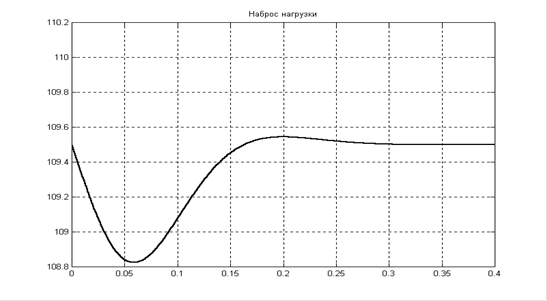
Рисунок П. Б.3- График момента при набросе нагрузки
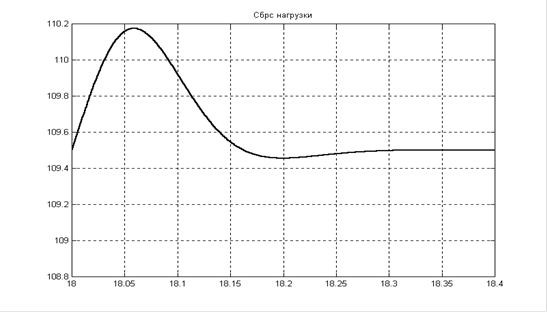
Рисунок П. Б.4- График скорости при сбросе нагрузки
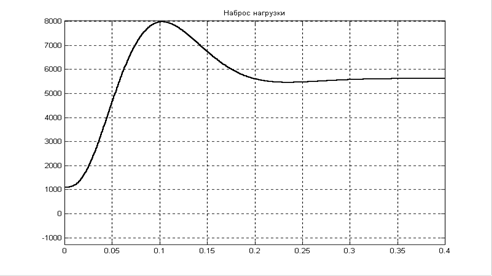
Рисунок П. Б.5- График тока при сбросе нагрузки
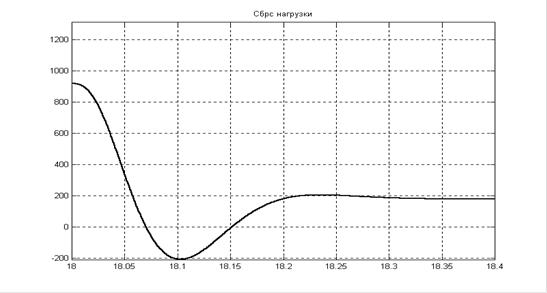
Рисунок П. Б.6- График момента при сбросе нагрузки
Наброс нагрузки:
| Время | Ток | Скорость | Момент |
| 0 | 1,80E+02 | 1,10E+02 | 1,10E+03 |
| 5,00E-03 | 1,82E+02 | 1,09E+02 | 1,11E+03 |
| 1,00E-02 | 1,93E+02 | 1,09E+02 | 1,18E+03 |
| 1,50E-02 | 2, 19E+02 | 1,09E+02 | 1,34E+03 |
| 2,00E-02 | 2,61E+02 | 1,09E+02 | 1,59E+03 |
| 2,50E-02 | 3, 19E+02 | 1,09E+02 | 1,95E+03 |
| 3,00E-02 | 3,91E+02 | 1,09E+02 | 2,39E+03 |
| 3,50E-02 | 4,75E+02 | 1,09E+02 | 2,90E+03 |
| 4,00E-02 | 5,66E+02 | 1,09E+02 | 3,46E+03 |
| 4,50E-02 | 6,62E+02 | 1,09E+02 | 4,05E+03 |
| 5,00E-02 | 7,58E+02 | 1,09E+02 | 4,63E+03 |
| 5,50E-02 | 8,52E+02 | 1,09E+02 | 5,21E+03 |
| 6,00E-02 | 9,41E+02 | 1,09E+02 | 5,75E+03 |
| 6,50E-02 | 1,02E+03 | 1,09E+02 | 6,24E+03 |
| 7,00E-02 | 1,09E+03 | 1,09E+02 | 6,69E+03 |
| 7,50E-02 | 1,16E+03 | 1,09E+02 | 7,06E+03 |
| 8,00E-02 | 1,21E+03 | 1,09E+02 | 7,38E+03 |
| 8,50E-02 | 1,25E+03 | 1,09E+02 | 7,62E+03 |
| 9,00E-02 | 1,28E+03 | 1,09E+02 | 7,80E+03 |
| 9,50E-02 | 1,29E+03 | 1,09E+02 | 7,91E+03 |
| 1,00E-01 | 1,30E+03 | 1,09E+02 | 7,97E+03 |
| 1,05E-01 | 1,30E+03 | 1,09E+02 | 7,97E+03 |
| 1,10E-01 | 1,30E+03 | 1,09E+02 | 7,93E+03 |
| 1,15E-01 | 1,28E+03 | 1,09E+02 | 7,85E+03 |
| 1, 20E-01 | 1,27E+03 | 1,09E+02 | 7,73E+03 |
| 1,25E-01 | 1,24E+03 | 1,09E+02 | 7,60E+03 |
| 1,30E-01 | 1,22E+03 | 1,09E+02 | 7,44E+03 |
| 1,35E-01 | 1, 19E+03 | 1,09E+02 | 7,27E+03 |
| 1,40E-01 | 1,16E+03 | 1,09E+02 | 7,10E+03 |
| 1,45E-01 | 1,13E+03 | 1,09E+02 | 6,92E+03 |
| 1,50E-01 | 1,10E+03 | 1,09E+02 | 6,75E+03 |
| 1,55E-01 | 1,08E+03 | 1,09E+02 | 6,58E+03 |
| 1,60E-01 | 1,05E+03 | 1,09E+02 | 6,43E+03 |
| 1,65E-01 | 1,03E+03 | 1,10E+02 | 6,28E+03 |
| 1,70E-01 | 1,01E+03 | 1,10E+02 | 6,14E+03 |
| 1,75E-01 | 9,85E+02 | 1,10E+02 | 6,02E+03 |
| 1,80E-01 | 9,67E+02 | 1,10E+02 | 5,91E+03 |
| 1,85E-01 | 9,52E+02 | 1,10E+02 | 5,82E+03 |
| 1,90E-01 | 9,38E+02 | 1,10E+02 | 5,73E+03 |
| 1,95E-01 | 9,27E+02 | 1,10E+02 | 5,67E+03 |
| 2,00E-01 | 9,18E+02 | 1,10E+02 | 5,61E+03 |
| 2,05E-01 | 9,10E+02 | 1,10E+02 | 5,56E+03 |
| 2,10E-01 | 9,04E+02 | 1,10E+02 | 5,53E+03 |
| 2,15E-01 | 9,00E+02 | 1,10E+02 | 5,50E+03 |
| 2, 20E-01 | 8,96E+02 | 1,10E+02 | 5,48E+03 |
| 2,25E-01 | 8,94E+02 | 1,10E+02 | 5,47E+03 |
| 2,30E-01 | 8,93E+02 | 1,10E+02 | 5,46E+03 |
| 2,35E-01 | 8,93E+02 | 1,10E+02 | 5,46E+03 |
| 2,40E-01 | 8,93E+02 | 1,10E+02 | 5,46E+03 |
| 2,45E-01 | 8,94E+02 | 1,10E+02 | 5,46E+03 |
| 2,50E-01 | 8,95E+02 | 1,10E+02 | 5,47E+03 |
| 2,55E-01 | 8,97E+02 | 1,10E+02 | 5,48E+03 |
| 2,60E-01 | 8,98E+02 | 1,10E+02 | 5,49E+03 |
| 2,65E-01 | 9,00E+02 | 1,10E+02 | 5,50E+03 |
| 2,70E-01 | 9,02E+02 | 1,10E+02 | 5,51E+03 |
| 2,75E-01 | 9,04E+02 | 1,10E+02 | 5,52E+03 |
| 2,80E-01 | 9,05E+02 | 1,10E+02 | 5,53E+03 |
| 2,85E-01 | 9,07E+02 | 1,10E+02 | 5,54E+03 |
| 2,90E-01 | 9,09E+02 | 1,10E+02 | 5,55E+03 |
| 2,95E-01 | 9,10E+02 | 1,10E+02 | 5,56E+03 |
| 3,00E-01 | 9,11E+02 | 1,10E+02 | 5,57E+03 |
| 3,05E-01 | 9,13E+02 | 1,10E+02 | 5,58E+03 |
| 3,10E-01 | 9,14E+02 | 1,10E+02 | 5,58E+03 |
| 3,15E-01 | 9,15E+02 | 1,10E+02 | 5,59E+03 |
| 3, 20E-01 | 9,15E+02 | 1,10E+02 | 5,59E+03 |
| 3,25E-01 | 9,16E+02 | 1,10E+02 | 5,60E+03 |
| 3,30E-01 | 9,17E+02 | 1,10E+02 | 5,60E+03 |
| 3,35E-01 | 9,17E+02 | 1,10E+02 | 5,61E+03 |
| 3,40E-01 | 9,18E+02 | 1,10E+02 | 5,61E+03 |
| 3,45E-01 | 9,18E+02 | 1,10E+02 | 5,61E+03 |
| 3,50E-01 | 9,18E+02 | 1,10E+02 | 5,61E+03 |
| 3,55E-01 | 9,18E+02 | 1,10E+02 | 5,61E+03 |
| 3,60E-01 | 9, 19E+02 | 1,10E+02 | 5,61E+03 |
| 3,65E-01 | 9, 19E+02 | 1,10E+02 | 5,61E+03 |
| 3,70E-01 | 9, 19E+02 | 1,10E+02 | 5,62E+03 |
| 3,75E-01 | 9, 19E+02 | 1,10E+02 | 5,62E+03 |
| 3,80E-01 | 9, 19E+02 | 1,10E+02 | 5,62E+03 |
| 3,85E-01 | 9, 19E+02 | 1,10E+02 | 5,62E+03 |
| 3,90E-01 | 9, 19E+02 | 1,10E+02 | 5,62E+03 |
| 3,95E-01 | 9, 19E+02 | 1,10E+02 | 5,62E+03 |
| 4,00E-01 | 9, 19E+02 | 1,10E+02 | 5,62E+03 |
Сброс нагрузки:
| Время | Ток | Скорость | Момент |
| 1,80E+01 | 9,18E+02 | 1,10E+02 | 5,61E+03 |
| 1,80E+01 | 9,16E+02 | 1,10E+02 | 5,60E+03 |
| 1,80E+01 | 9,05E+02 | 1,10E+02 | 5,53E+03 |
| 1,80E+01 | 8,79E+02 | 1,10E+02 | 5,37E+03 |
| 1,80E+01 | 8,37E+02 | 1,10E+02 | 5,12E+03 |
| 1,80E+01 | 7,79E+02 | 1,10E+02 | 4,76E+03 |
| 1,80E+01 | 7,07E+02 | 1,10E+02 | 4,32E+03 |
| 1,80E+01 | 6,23E+02 | 1,10E+02 | 3,81E+03 |
| 1,80E+01 | 5,32E+02 | 1,10E+02 | 3,25E+03 |
| 1,80E+01 | 4,36E+02 | 1,10E+02 | 2,67E+03 |
| 1,81E+01 | 3,40E+02 | 1,10E+02 | 2,08E+03 |
| 1,81E+01 | 2,46E+02 | 1,10E+02 | 1,51E+03 |
| 1,81E+01 | 1,58E+02 | 1,10E+02 | 9,64E+02 |
| 1,81E+01 | 7,65E+01 | 1,10E+02 | 4,68E+02 |
| 1,81E+01 | 4,41E+00 | 1,10E+02 | 2,70E+01 |
| 1,81E+01 | -5,74E+01 | 1,10E+02 | -3,51E+02 |
| 1,81E+01 | -1,08E+02 | 1,10E+02 | -6,63E+02 |
| 1,81E+01 | -1,48E+02 | 1,10E+02 | -9,07E+02 |
| 1,81E+01 | -1,77E+02 | 1,10E+02 | -1,08E+03 |
| 1,81E+01 | -1,96E+02 | 1,10E+02 | -1, 20E+03 |
| 1,81E+01 | -2,05E+02 | 1,10E+02 | -1,25E+03 |
| 1,81E+01 | -2,06E+02 | 1,10E+02 | -1,26E+03 |
| 1,81E+01 | -1,99E+02 | 1,10E+02 | -1,22E+03 |
| 1,81E+01 | -1,86E+02 | 1,10E+02 | -1,13E+03 |
| 1,81E+01 | -1,67E+02 | 1,10E+02 | -1,02E+03 |
| 1,81E+01 | -1,45E+02 | 1,10E+02 | -8,85E+02 |
| 1,81E+01 | -1, 19E+02 | 1,10E+02 | -7,29E+02 |
| 1,81E+01 | -9, 19E+01 | 1,10E+02 | -5,62E+02 |
| 1,81E+01 | -6,34E+01 | 1,10E+02 | -3,88E+02 |
| 1,81E+01 | -3,47E+01 | 1,10E+02 | -2,12E+02 |
| 1,82E+01 | -6,42E+00 | 1,10E+02 | -3,92E+01 |
| 1,82E+01 | 2,09E+01 | 1,10E+02 | 1,28E+02 |
| 1,82E+01 | 4,68E+01 | 1,10E+02 | 2,86E+02 |
| 1,82E+01 | 7,10E+01 | 1,09E+02 | 4,34E+02 |
| 1,82E+01 | 9,32E+01 | 1,09E+02 | 5,69E+02 |
| 1,82E+01 | 1,13E+02 | 1,09E+02 | 6,92E+02 |
| 1,82E+01 | 1,31E+02 | 1,09E+02 | 8,01E+02 |
| 1,82E+01 | 1,47E+02 | 1,09E+02 | 8,96E+02 |
| 1,82E+01 | 1,60E+02 | 1,09E+02 | 9,78E+02 |
| 1,82E+01 | 1,71E+02 | 1,09E+02 | 1,05E+03 |
| 1,82E+01 | 1,81E+02 | 1,09E+02 | 1,10E+03 |
| 1,82E+01 | 1,88E+02 | 1,09E+02 | 1,15E+03 |
| 1,82E+01 | 1,94E+02 | 1,09E+02 | 1, 19E+03 |
| 1,82E+01 | 1,99E+02 | 1,09E+02 | 1,21E+03 |
| 1,82E+01 | 2,02E+02 | 1,09E+02 | 1,23E+03 |
| 1,82E+01 | 2,04E+02 | 1,09E+02 | 1,25E+03 |
| 1,82E+01 | 2,05E+02 | 1,09E+02 | 1,25E+03 |
| 1,82E+01 | 2,05E+02 | 1,09E+02 | 1,26E+03 |
| 1,82E+01 | 2,05E+02 | 1,09E+02 | 1,25E+03 |
| 1,82E+01 | 2,04E+02 | 1,09E+02 | 1,25E+03 |
| 1,83E+01 | 2,03E+02 | 1,09E+02 | 1,24E+03 |
| 1,83E+01 | 2,02E+02 | 1,09E+02 | 1,23E+03 |
| 1,83E+01 | 2,00E+02 | 1,09E+02 | 1,22E+03 |
| 1,83E+01 | 1,98E+02 | 1,09E+02 | 1,21E+03 |
| 1,83E+01 | 1,96E+02 | 1,09E+02 | 1, 20E+03 |
| 1,83E+01 | 1,95E+02 | 1,09E+02 | 1, 19E+03 |
| 1,83E+01 | 1,93E+02 | 1,09E+02 | 1,18E+03 |
| 1,83E+01 | 1,91E+02 | 1,09E+02 | 1,17E+03 |
| 1,83E+01 | 1,90E+02 | 1,10E+02 | 1,16E+03 |
| 1,83E+01 | 1,88E+02 | 1,10E+02 | 1,15E+03 |
| 1,83E+01 | 1,87E+02 | 1,10E+02 | 1,14E+03 |
| 1,83E+01 | 1,86E+02 | 1,10E+02 | 1,14E+03 |
| 1,83E+01 | 1,85E+02 | 1,10E+02 | 1,13E+03 |
| 1,83E+01 | 1,84E+02 | 1,10E+02 | 1,12E+03 |
| 1,83E+01 | 1,83E+02 | 1,10E+02 | 1,12E+03 |
| 1,83E+01 | 1,82E+02 | 1,10E+02 | 1,11E+03 |
| 1,83E+01 | 1,82E+02 | 1,10E+02 | 1,11E+03 |
| 1,83E+01 | 1,81E+02 | 1,10E+02 | 1,11E+03 |
| 1,83E+01 | 1,81E+02 | 1,10E+02 | 1,10E+03 |
| 1,83E+01 | 1,80E+02 | 1,10E+02 | 1,10E+03 |
| 1,84E+01 | 1,80E+02 | 1,10E+02 | 1,10E+03 |
| 1,84E+01 | 1,80E+02 | 1,10E+02 | 1,10E+03 |
| 1,84E+01 | 1,80E+02 | 1,10E+02 | 1,10E+03 |
| 1,84E+01 | 1,80E+02 | 1,10E+02 | 1,10E+03 |
| 1,84E+01 | 1,80E+02 | 1,10E+02 | 1,10E+03 |
| 1,84E+01 | 1,79E+02 | 1,10E+02 | 1,10E+03 |
| 1,84E+01 | 1,79E+02 | 1,10E+02 | 1,10E+03 |
| 1,84E+01 | 1,79E+02 | 1,10E+02 | 1,10E+03 |
| 1,84E+01 | 1,79E+02 | 1,10E+02 | 1,10E+03 |
| 1,84E+01 | 1,79E+02 | 1,10E+02 | 1,10E+03 |
| 1,84E+01 | 1,79E+02 | 1,10E+02 | 1,10E+03 |