| Введение
Определяющая роль в решении задач обеспечения эффективности производства, надежности и безопасности эксплуатации технологического оборудования принадлежит автоматизированным системам управления технологическими процессами (АСУ ТП).
Вопросы разработки АСУ ТП, выбора средств измерений и автоматики тесно связаны со спецификой технологических процессов и должны быть решены на стадии проектирования соответствующих технологических установок, т.е. инженер теплоэнергетик, участвующий в проектировании технологической установки, должен иметь соответствующие знания.
Эти знания будущие специалисты, обучающиеся по специальности 10.07.00 «Промышленная теплоэнергетика» получают при изучении дисциплины «Автоматика тепловых процессов». Курсовая работа, предусмотренная рабочей программой этой дисциплины способствует закреплению, углублению и обобщению знаний, полученных студентами за время обучения, и применению этих знаний к комплексному решению конкретных инженерных задач по разработке схем теплотехнического контроля и автоматизации теплоэнергетических установок.
Курсовая работа включает в себя разработку системы теплового контроля и автоматики технологической установки, выбор технических средств, определение динамических свойств объекта регулирования и расчет настроек регулятора.
1. Содержание и состав курсовой работы
1.1 Общие положения
Курсовая работа по проектированию системы автоматического регулирования тепловых процессов состоит из пояснительной записки и графической части.
Текстовая часть (пояснительная записка) курсовой работы включает следующие основные разделы:
1. Введение.
2. Характеристика объекта автоматизации и разработка функциональной схемы автоматики.
3. Выбор средств автоматизации и теплового контроля.
4. Расчет оптимальных настроек автоматического регулятора
5. Список литературы
Ориентировочный объем пояснительной записки к курсовой работе – – 10…15 страниц печатного текста.
Графическая часть состоит из одного чертежа – функциональной схемы автоматизации заданной технологической установки. Подробные указания по выполнению функциональной схемы приведены в разделе 4.
2. Пояснения к текстовой части проекта
2.1 Введение
Рассматривают общие задачи автоматизации данной отрасли промышленности. Обосновывают целесообразность автоматизации рекомендованного в задании технологического процесса.
2.2 Характеристика объекта автоматизации и разработка функциональной схемы автоматики
Кратко описывают технологический процесс и аппараты, в которых он осуществляется. На основе анализа технологического процесса выбирают параметры, регулирование которых необходимо осуществлять для обеспечения безопасной эксплуатации технологической установки, экономичности ее работы и высокого качества получаемой продукции.
После выбора регулируемых и регулирующих параметров выбирают параметры, подлежащие измерению, регистрации (параметры, необходимые для расчета технико-экономических показателей работы технологической установки, подстройки регуляторов и т.п.), сигнализации и так далее.
На основе проведенного анализа технологического процесса разрабатывается функциональная схема автоматизации и теплового контроля заданной технологической установки.
2.3 Выбор средств автоматизации и теплового контроля
Средства автоматизации, используемые для управления технологическим процессом, должны быть выбраны с учетом динамических свойств объекта регулирования, преимущественно отечественные, выпускаемые серийно.
Необходимо стремиться к применению однотипных средств измерения унифицированных систем, характеризуемых простотой сочетания, взаимозаменяемостью и удобством компоновки на щитах управления. Использование однотипной аппаратуры дает значительные преимущества при монтаже, наладке, эксплуатации, обеспечении запасными частями и т.п.
В качестве локальных средств сбора и накопления первичной информации (автоматических датчиков), вторичных приборов, регулирующих и исполнительных устройств следует использовать приборы и средства автоматизации Государственной системы промышленных приборов (ГСП).
В заключении этого раздела приводится спецификация на все выбранные средства автоматизации и измерения. Указания по заполнению спецификации приведены в разделе 4.
2.4 Выбор и расчет оптимальных настроек автоматического регулятора
По заданной разгонной характеристике находятся параметры характеризующие динамические свойства объекта регулирования и записывается его передаточная функция. Используя методику изложенную в разделе 6 выполняется расчет настроек автоматического регулятора реализующего П-, ПИ-, и ПИД – законы регулирования
3. Указания по выбору средств автоматизации
Конкретные типы средств автоматизации выбирают с учетом особенностей технологического процесса и его параметров.
В первую очередь принимают во внимание такие факторы, как пожаро- и взрывоопасность, агрессивность и токсичность среды, число параметров, участвующих в управлении, и их физико-химические свойства, дальность передачи сигналов информации и управления, требуемые точность и быстродействие. Эти факторы определяют выбор методов измерения технологических параметров, требуемые функциональные возможности регуляторов и приборов (законы регулирования, показание, запись и т.д.), диапазоны измерения, классы точности, вид дистанционной передачи и т.д.
Приборы и средства автоматизации следует подбирать по справочной литературе (9, 12, 15, 16), исходя из следующих соображений:
– для контроля и регулирования одинаковых параметров технологического процесса необходимо применять однотипные средства автоматизации, выпускаемые серийно;
– при большом числе одинаковых параметров рекомендуется применять многоточечные приборы;
– при автоматизации сложных технологических процессов необходимо использовать вычислительные и управляющие машины;
– класс точности приборов должен соответствовать технологическим требованиям;
– для автоматизации технологических аппаратов с агрессивными средами необходимо предусматривать установку специальных приборов, а в случае применения приборов в нормальном исполнении нужно защищать их.
Наиболее распространенные типы промышленных вторичных приборов, входящих в ГСП, представлены ниже:
| Входной сигнал
|
Тип измеритель-
ного прибора
|
| Давление сжатого воздуха
|
ПВ
|
| Постоянное напряжение
|
КСП
|
| Постоянный ток
|
КСУ
|
| Электрическое сопротивление
|
КСМ
|
| Взаимоиндуктивность
|
КСД
|
Приборы ПВ являются вторичными приборами пневматической системы «Старт» и применяются для измерения любых технологических параметров, предварительно преобразованных в давление сжатого воздуха (унифицированный пневматический сигнал). В частности, прибор ПВ 10.1Э предназначен для работы с одним из регуляторов системы «Старт». Он записывает на ленточную диаграмму величину регулируемого параметра, показывает значение сигнала задания и управляющего воздействия в прибор входит станция управления регулятором.
Автоматические потенциометры КСП уравновешенные мосты КСМ, миллиамперметры КСУ применяют для измерения, записи и регулирования (при наличии регулирующего устройства) температуры и других параметров, изменение которых может быть преобразовано в изменение напряжения постоянного тока, активного сопротивления, силы тока постоянного тока.
Потенциометры КСП-4 в зависимости от модификации могут работать или в комплекте с одной или несколькими (если прибор многоточечный) термопарами стандартных градуировок, или с одним или несколькими источниками постоянного напряжения.
Уравновешенные мосты КСМ-4 работают в комплекте с одним или несколькими термометрами сопротивления стандартных градуировок, а миллиамперметры КСУ-4 – в комплекте с одним или несколькими источниками сигналов постоянного тока.
Вторичные приборы КСД работают в комплекте с первичными измерительными преобразователями, снабженными дифференциально-трансформаторными датчиками.
Каждый тип приборов, указанных выше, выпускается в различных модификациях, отличающихся размерами, диапазонами измерения, количеством входных сигналов, наличием вспомогательных устройств и т.д.
Выбирая тот или иной прибор по функциональному признаку, необходимо простоту и дешевизну аппаратуры сочетать с требованиями контроля и регулирования данного параметра. Наиболее важные параметры следует контролировать самопишущими приборами, более сложными и дорогими, чем показывающие приборы. Регулируемые параметры технологического процесса необходимо, также контролировать самопишущими приборами, что имеет значение для корректировки настройки регуляторов.
При выборе вторичных приборов для совместной работы с однотипными датчиками одной градуировки и с одинаковыми пределами измерения следует учитывать, приборы КСП, КСМ, КСД выпускаются с числом точек 3,6,12. В многоточечных приборах имеется переключатель, автоматически и поочередно подключающий датчик к измерительной схеме. Печатающее устройство, расположенное на каретке, отпечатывает на диаграмме точки с порядковым номером датчика.
При выборе вида унифицированного сигнала канала связи от датчика до вторичного прибора принимается во внимание длина канала связи. При длине до 300 м можно применять любой унифицированный сигнал, если автоматизируемый технологический процесс не является пожаро- и взрывоопасным. При пожаро- и взрывоопасности и расстоянии не более 60 м целесообразно использовать пневматические средства автоматизации, например регуляторы и приборы системы «Старт». Электрические средства автоматизации характеризуются гораздо меньшим запаздыванием и превосходят пневматические средства по точности измерения (класс точности большинства пневматических приборов – 1,0, электрических – 0,5). Применение электрических средств упрощает внедрение вычислительных машин.
Выбирая датчики и вторичные приборы для совместной работы, следует обращать внимание на согласование выходного сигнала датчика и входного сигнала вторичного прибора.
Например, при токовом выходном сигнале датчика входной сигнал вторичного прибора тоже должен быть токовым, причем род тока и диапазон его изменения у датчика и вторичного прибора должны быть одинаковыми. Если это условие не выполняется, то следует воспользоваться имеющимися в ГСП промежуточными преобразователями одного унифицированного сигнала в другой (табл. 1).
Таблица 1. Наиболее распространенные промежуточные преобразователи ГСП
| Тип преобразователя
|
Входной сигнал
|
Выходной сигнал
|
| ПТ-ТП 68
|
ЭДС термопары
|
Постоянный ток 0…5 мА
|
| ПТ-ТС 68
|
Электрическое
сопротивление
|
Постоянный ток 0…5 мА
|
| НП-ТЛ1-М
|
ЭДС термопары
|
Постоянный ток 0…5 мА
|
| НП-СЛ1-М
|
Электрическое
сопротивление
|
Постоянный ток 0…5 мА
|
| НП-3
|
Напряжение
постоянного
тока 0…2В
|
Постоянный ток 0…5 мА
|
| ЭПП-63
|
Постоянный ток
0…5мА
|
Давление сжатого воздуха 0,2…1,0 кгс/см2
|
Промежуточный преобразователь НП-П3 используется в качестве нормирующего для преобразования выходного сигнала дифференциально-трансформаторного преобразователя в унифицированный токовый сигнал.
Преобразователи ЭПП-63 и ПЭ-55М осуществляют переход соответственно с электрической ветви ГСП на пневматическую и с пневматической ветви ГСП на электрическую.
При выборе датчиков и приборов следует обращать внимание не только на класс точности, но и на диапазон измерения. Следует помнить, что номинальные значения параметра должны находиться в последней трети диапазона измерения датчика или прибора. При невыполнении этого условия относительная погрешность измерения параметра значительно превысит относительную приведенную погрешность датчика или прибора. Таким образом, не следует выбирать диапазон измерения с большим запасом (достаточно иметь верхний предел измерения, не более чем на 25% превышающий номинальное значение параметра).
Если измеряемая среда химически активна по отношению к материалу датчика или прибора (например, пружинного манометра, гидростатического уровнемера, дифманометра для измерения расхода по методу переменного перепада давлений), то его защиту осуществляют с помощью разделительных сосудов или мембранных разделителей.
При автоматизации химико-технологических процессов для изменения расхода жидких сред обычно используют пневматические регулирующие клапаны, включающие исполнительный механизм с пневмоприводом и регулирующий орган.
4. Указания по выполнению функциональных схем автоматизации
Функциональная схема теплового автоматики и контроля разрабатывается в соответствии с требованиями соответствующих нормативных документов [3–7] и оформляется по ГОСТ 21.404–85.
Разработка функциональной схемы автоматики и теплового контроля начинается изображения схемы технологической системы или агрегата (например, изображение системы отопления, системы вентиляции, кондиционирования воздуха, технологической схемы системы теплоснабжения, газоснабжения или теплогенерирующей установки и т.п.).
Технологическое оборудование и коммуникации при разработке функциональных схем должны изображаться упрощенно, без указания отдельных технологических аппаратов и трубопроводов вспомогательного назначения. Однако изображенная таким образом технологическая схема должна давать ясное представление о принципе ее работы.
На технологических трубопроводах показывают ту регулирующую и запорную арматуру, которая непосредственно участвует в управлении процессом, а также запорные и регулирующие органы, необходимые для определения относительного расположения мест отбора импульсов. Технологические коммуникации и трубопроводы жидкости и газа изображают условными обозначениями в соответствии с ГОСТ 2.784–70, приведенными в табл. 2.
Таблица 2. Условные цифровые обозначения трубопроводов для жидкостей и газов по ГОСТ 2.784–70
| Наименование среды, транспортируемой
трубопроводом
|
Обозначение
|
| Вода
|
-1–1-
|
| Пар
|
-2–2-
|
| Воздух
|
-3–3-
|
| Азот
|
-4–4-
|
| Кислород
|
-5–5-
|
| Масло
|
-14–14-
|
| Жидкое горючее
|
-15–15-
|
| фреон
|
-18–18-
|
| Противопожарный трубопровод
|
-26–26-
|
На технологическую схему проектируемой системы наносят все элементы системы автоматического регулирования. Приборы и преобразователи показываются в виде условных изображений и объединяются в единую систему линиями функциональных связей.
Функциональную схему теплового контроля выполняют, как правило, на одном листе, на котором изображают аппаратуру всех систем контроля, регулирования, управления и сигнализации, относящуюся к данной технологической установке.
Сложные технологические схемы рекомендуется расчленять на отдельные технологические узлы и выполнять функциональные схемы этих узлов в виде отдельных чертежей на нескольких листах или на одном.
Пример функциональной схемы показан на рисунке 1.
Контуры технологического оборудования на функциональных схемах рекомендуется выполнять линиями толщиной 0,6–1,5 мм; трубопроводные коммуникации 0,6–1,5 мм;
приборы и средства автоматизации 0,5–0,6 мм; линии связи 0,2–0,3 мм; прямоугольники, изображающие щиты и пульты, 0,6–1,5 мм.
Приборы, средства автоматизации, электрические устройства и элементы вычислительной техники на функциональных схемах автоматизации показываются в соответствии с ГОСТ 21.404–85 и отраслевыми нормативными документами.
ГОСТ 21.404–85 предусматривает систему построения графических и буквенных условных обозначений по функциональным признакам, выполняемым приборами. Приборы изображаются окружностями разделенными горизонтальной линией. В верхней части окружности
наносятся буквенные обозначения измеряемой величины и функционального признака прибора (таблицы 3, 4, 5). В нижней части окружности наносится позиционное обозначение (цифровое или буквенноцифровое), служащее для нумерации отдельных элементов j комплекта измерения.
Таблица 3. Буквенные условные обозначения по ГОСТ 21.404–85
| Обозна-чение
|
Измеряемая величина
|
Функции выполняемые прибором
|
| Основное назначение первой буквы
|
Дополнительное
назначение, уточняющее назначение первой буквы
|
Отображение информации
|
Формирование выходного сигнала
|
Дополнительное назначение
|
| А
|
Сигнализация
|
| В
|
| С
|
–
|
–
|
–
|
Регулирование, управление
|
| D
|
Плотность
|
Разность перепад,
|
–
|
–
|
–
|
| Е
|
Любая элек трическая величина
|
–
|
–
|
-
|
| F
|
Расход
|
Соотношение, доля дробь
|
-
|
-
|
–
|
| G
|
Размер, положение перемещение
|
–
|
–
|
-
|
-
|
| Н
|
Ручное воздействие
|
–
|
–
|
–
|
Верхний предел измеряемой вел.
|
| I
|
Показание
|
–
|
–
|
| J
|
.
|
Автоматиче ское переклю чение обега ние
|
–
|
~
|
–
|
| R
|
Радиоак гив – ность
|
-
|
Регистрация
|
–
|
–
|
| S
|
Скорость, частота
|
–
|
-
|
Включение, отключение, переключение, сигнализация
|
-
|
| T
|
Температура
|
-
|
–
|
| U
|
Несколько разнородных измеряемых величин
|
| V
|
Вязкость
|
-
|
-
|
-
|
| W
|
Масса
|
| Х
|
Нерекомен дуемая
резервная буква
|
–
|
–
|
–
|
–
|
| К
|
Время,
временная программа
|
–
|
–
|
–
|
-
|
| L
|
Уровень
|
-
|
-
|
-
|
Нижний предел измеряемой вел.
|
| М
|
Влажность
|
–
|
–
|
–
|
–
|
| N
|
Резервная буква
|
–
|
–
|
–
|
| 0
|
Резервная буква
|
–
|
–
|
–
|
–
|
| Р
|
Давление, вакуум
|
–
|
–
|
–
|
–
|
| Q
|
Величина, характери-зующая
качество,
состав, концентра-цию и т. п
|
Интегриро вание, сумми рование по времени
|
–
|
–
|
–
|
Таблица 4. Дополнительные буквенные обозначения, отражающие функциональные признаки приборов по ГОСТ 21.404–85
| Наименование
|
Обозначение
|
| Чувствительный элемент (первичное преобразование)
|
Е
|
| Дистанционная передача (промежуточное преобразование)
|
Т
|
| Станция управления
|
К
|
| Преобразование; вычислительные функции
|
Y
|
Таблица 5. Дополнительные обозначения, отражающие функциональные признаки преобразователей сигналов и вычислительных устройств по ГОСТ 21.404–85
| Наименование
|
Обозначение
|
| Род сигнала:
электрический
пневматический
гидравлический
|
Е
Р
G
|
| Виды сигнала:
аналоговый
дискретный
|
А
D
|
Пример построения условного обозначения прибора для измерения, регистрации и автоматического регулирования перепада давления приведен на рис. 2.
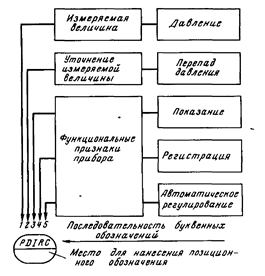
Рис. 2. Пример построения условного обозначения прибора для измерения, регистрации и автоматического регулирования перепада давления
Всем приборам и преобразователям, изображенным на функциональной схеме, присваиваются позиционные обозначения, состоящие из двух частей: арабских цифр – номера функциональной группы и строчных букв русского алфавита – номера прибора и ТСА в данной функциональной группе (например, 5а, 3б и т.п.).
Буквенные обозначения присваивают каждому элементу функциональной группы в порядке алфавита в зависимости от последовательности прохождения сигнала – от устройств получения информации к устройствам воздействия на управляемый процесс (например, приемное устройство – датчик, вторичный преобразователь, задатчик, регулятор, указатель положения, исполнительный механизм, регулирующий орган).
Допускается вместо букв русского алфавита использовать арабские цифры (например, 5–1, 3–2 и т.д.).
Примеры изображения отдельных измерительных каналов приведены на рисунках 3–11
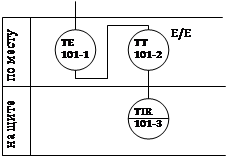
Рис. 3. Индикация и регистрация температуры (TIR).
101–1 Термоэлектрический термометр тип ТХА, гр. ХА, пределы измерения от –50 °С до 900 °С, материал корпуса Ст0Х20Н14С2, марка ТХА-0515
101–2 Преобразователь термоЭДС в стандартный токовый сигнал 0…5 мА, гр. ХА, марка Ш-72
101–3 Миллиамперметр показывающий регистрирующий на 2 параметра, марка А-54
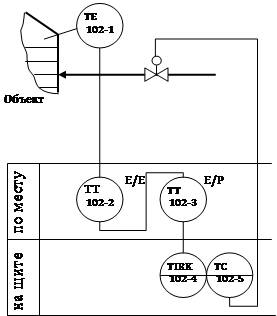
Рис. 4. Индикация, регистрация и регулирование температуры с помощью пневматического регулятора (TIRС, пневматика).
102–1 Термоэлектрический термометр тип ТХА, гр. ХА, пределы измерения от –50 °С до 900 °С, материал корпуса Ст0Х20Н14С2, марка ТХА-0515
102–2 Преобразователь термоЭДС в стандартный токовый сигнал 0…5 мА, гр. ХА, марка Ш-72
102–3 электропневмопреобразователь, входной сигнал 0…5 мА, выходной – стандартный пневматический 0,02…0,1 МПа, марка ЭПП-63 (или ЭПП-180)
102–4 пневматический вторичный прибор на 3 параметра со станцией управления, марка ПВ 10.1Э (с электроприводом диаграммной ленты)
102–5 Пневматический ПИ-регулятор ПР 3.31
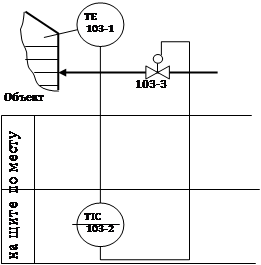
Рис. 5. Индикация и регулирование температуры с помощью микропроцессорного регулятора (TIС, эл.).
103–1 Термоэлектрический термометр тип ТХА, гр. ХА, пределы измерения от –50 °С до 900 °С, материал корпуса Ст0Х20Н14С2, марка ТХА-0515
103–2 Трехканальный микропроцессорный регулятор типа «Протерм-100»
103–3 Регулирующий клапан для неагрессивных сред, корпус из чугуна, предельная температура Т = 300 °С, давление Ру
= 1,6 МПа, условный диаметр Dу
= 100 мм, тип 25нч32нж

Рис. 6. Пример схемы контроля давления. Индикация давления (PI).
210–1 Манометр пружинный М-…

Рис. 7. Сигнализация давления (PA).
202–1 Пневматический первичный преобразователь давления, предел измерения 0… 1,6 МПа, выходной сигнал 0,02…0,1 МПа, марка МС-П-2 (манометр сильфонный с пневмовыходом)
202–2 Электроконтактный манометр с сигнальной лампой ЭКМ-1
202–3 Лампа сигнальная Л-1
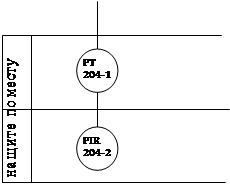
Рис. 8. Индикация и регистрация давления (PIR, эл.).
204–1 Первичный преобразователь давления со стандартным токовым выходом 0…5 мА, марка МС-Э (или Сапфир-22ДИ и т.д.)
204–2 Миллиамперметр показывающий регистрирующий на 2 параметра, марка А-542
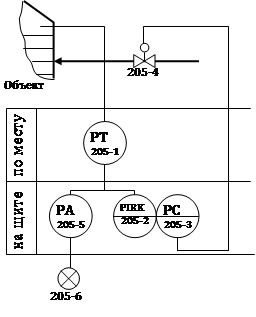
Рис. 9. Индикация и регулирование давления
205–1 Пневматический первичный преобразователь давления, предел измерения 0… 1,6 МПа, выходной сигнал 0,02…0,1 МПа, марка МС-П-2 (манометр сильфонный с пневмовыходом)
205–2 пневматический вторичный прибор на 3 параметра со станцией управления, марка ПВ 10.1Э (с электроприводом диаграммной ленты)
205–3 Пневматический ПИ-регулятор ПР 3.31
205–4 Регулирующий клапан для неагрессивных сред, корпус из чугуна, предельная температура Т = 300 °С, давление Ру
= 1,6 МПа, условный
205–5 Электроконтактный манометр с сигнальной лампой ЭКМ-1
205–6 Лампа сигнальная Л-1
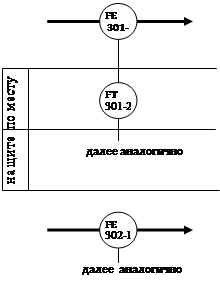
Рис. 10. Схемы контроля расхода.
Для измерения расхода жидкости первичные преобразователи устанавливаются в сечении трубопровода, поэтому на схеме их обозначения изображаются встроенным в трубопровод.
При использовании сужающих устройств, например, диафрагм, перепад давлений на них замеряется дифманометрами, поэтому схемы автоматизации аналогичны схемам контроля давления.
301–1 Диафрагма марки ДК6–50-II-а/г-2 (диафрагма камерная, давление Ру
= 6 атм, диаметр Dу
= 50 мм)
301–2 Дифманометр с пневмовыходом 0,02…0,1 МПа, марка ДС-П1 (для пневматики) или Сапфир-22ДД (для электрической схемы)
302–1 Ротаметр РД-П (с пневмовыходом) или РД-Э (с электрическим выходом)
5. Указания к выполнению спецификации на приборы и средства автоматизации
Спецификация на все показанные на функциональной схеме приборы и преобразователи оформляется в виде таблицы. Пример спецификации для фрагмента функциональной схемы контроля температуры приведен ниже
Форма спецификации к ФСА.
| поз.
|
Параметры среды,
измеряемые параметры
|
Наименование и техническая
характеристика
|
Марка
|
К-во
|
Приме-
чание
|
| 101–1
|
Температура в аппарате
|
Термоэлектрический термометр тип ТХА, гр. ХА, пределы измерения от –50 °С до 900 °С
|
марка ТХА-0515
|
1
|
На трубопроводе
|
| 101–2
|
Температура в аппарате
|
Преобразователь термоЭДС в стандартный токовый сигнал 0…5 мА, гр. ХА
|
марка Ш-72
|
1
|
по месту
|
| 101–3
|
Температура в аппарате
|
Миллиамперметр показывающий регистрирующий на 2 параметра
|
марка А-542
|
1
|
На щите
|
Графы таблицы заполняются следующим образом:
в графе 1 – буквенно-цифровое обозначение прибора в соответствии с его позиционным обозначением на схеме; сначала заносятся приборы с цифровым индексом 1, т.е. приборы первого комплекта (1–1, 1–2, 1–3,…), затем – второго комплекта (2–1, 2–2,…) и т.д.;
в графе 2 – полное наименование контролируемого или регулируемого параметра, например: «уровень щелока в выпарном аппарате», «давление в коллекторе ретортного газа»;
в графе 3 – рабочее значение параметра, например: «2,5 кПа», «10 Н/м2
»; для параметров, изменяющихся в большом диапазоне, в частности при программном регулировании, приводятся минимальное и максимальное значение параметра;
в графе 4 – марка (шифр) прибора;
в графе 5 – количество однотипных приборов, установленных на объекте;
в графе 6 – место установки прибора («по месту» – непосредственно у объекта, или «на щите»).
6.
Выбор и расчет оптимальных настроек автоматического регулятора
Для того чтобы выбрать тип регулятора и определить его настройки необходимо знать:
1. Статические и динамические характеристики объекта управления.
2. Требования к качеству процесса регулирования.
3. Показатели качества регулирования для серийных регуляторов.
4. Характер возмущений, действующих на процесс регулирования.
6.1 Определение динамических характеристик объекта регулирования
В настоящее время при расчете настроек регуляторов локальных систем широко используются простые динамические модели промышленных объектов управления. В частности, использование моделей инерционных звеньев первого или второго порядка с запаздыванием для расчета настроек регуляторов обеспечивает в большинстве случает качественную работу реальной системы управления.
В зависимости от вида переходной характеристики (кривой разгона) задаются чаще всего одним из двух видов передаточной функции объекта управления:
- в виде передаточной функции инерционного звена первого порядка
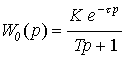 (1) (1)
где –  коэффициент усиления, постоянная времени и запаздывание, которые должны быть определены в окрестности номинального режима работы объекта. коэффициент усиления, постоянная времени и запаздывание, которые должны быть определены в окрестности номинального режима работы объекта.
Для объекта управления без самовыравнивания передаточная функция имеет вид
 (2) (2)
По кривой разгона оценивается характер объекта управления (с самовыравниванием или без) и определяются параметры соответствующей передаточной функции. Передаточную функцию вида (1) рекомендуется применять для объектов управления с явно выраженной доминирующей постоянной времени (одноемкостный объект). Перед началом обработки кривую разгона рекомендуется пронормировать (диапазон изменения нормированной кривой 0 – 1) и выделить из ее начального участка величину чистого временного запаздывания.
Методы первого порядка
Передаточная функция и разгонная характеристика объекта регулирования
Wм
(s) =  , ,
h(t) = K (1 –  ).
1 (t). (3) ).
1 (t). (3)
Определение параметров модели
Постоянная времени Т определяется как длина подкасательной, проведенной к кривой в точке t = t (рис. 12, а) или в точке перегиба t = tw
(рис. 12, б). В этом случае вводится дополнительное запаздывание tд
(рис. 12, б), а модель характеризуется эквивалентным запаздыванием.
tэ
= t + tд
.
Описанный метод является довольно грубым, его можно использовать для предварительной оценки свойств объекта.
Интерполяционный метод Ормана.
Пусть основное запаздывание уже выделено (рис. 10), начало координат смещено в точку t = t. Поребуем, чтобы переходная кривая модели проходила через точки А и В.
Подставляя координаты (tA
, DyA
) и (tB
, DyB
) точек А и В и t = tд
в формулу (27), для Dy(t) получим систему из двух уравнений:
DyА
= K (1 –  ) Dх, ) Dх, DyВ
= K (1 –  ) Dх. ) Dх.
Решение системы (4) относительно tд
и Т имеет вид:
tд
=  , , Т = –  . .
Если принять DyА
= 0,33.
Dyуст,
а DyВ
= 0,7.
Dyуст
, то выражения (5) значительно упрощаются:
tд
= 0,5.
(3.
tА
– tВ
), Т = 1,25.
(tВ
– tА
).
Для проверки точности модели ординаты экспериментальной кривой в точках t1
= 0,8.
Т + tд
, t2
= 2.
Т + tд
сравниваются с соответствующими ординатами переходной кривой модели Dy1
= 0,33.
Dyуст,
Dy2
= 0,865.
Dyуст.
Погрешность не должна превышать (0,02 + 0,03.
Dyуст)
.
6.2
Выбор типа регулятора
Задача проектировщика состоит в выборе такого типа регулятора, который при минимальной стоимости и максимальной надежности обеспечивал бы заданное качество регулирования. Разработчиком могут быть выбраны релейные, непрерывные или дискретные (цифровые) типы регуляторов.
Выбор типа регулятора обычно начинается с простейших двухпозиционных регуляторов и может заканчиваться самонастраивающимися микропроцессорными регуляторами. Заметим, что по требованиям технологического регламента многие объекты не допускают применения релейного управляющего воздействия.
Рассмотрим показатели качества серийных регуляторов. В качестве серийных предполагаются аналоговые регуляторы, реализующие И, П, ПИ и ПИД – законы управления.
Теоретически, с усложнением закона регулирования качество работы системы улучшается. Известно, что на динамику регулирования наибольшее влияние оказывает величина отношения запаздывания к постоянной времени объекта  Эффективность компенсации ступенчатого возмущения регулятором достаточно точно может характеризоваться величиной динамического коэффициента регулирования Эффективность компенсации ступенчатого возмущения регулятором достаточно точно может характеризоваться величиной динамического коэффициента регулирования  , а быстродействие – величиной времени регулирования. , а быстродействие – величиной времени регулирования.
Минимально возможное время регулирования для различных типов регуляторов при оптимальной их настройке определяется таблицей 6.
Таблица 6.
| Закон регулирования
|
П
|
ПИ
|
ПИД
|
| 
|
6.5
|
12
|
7
|
где –  время регулирования, время регулирования, – запаздывание в объекте. – запаздывание в объекте.
Теоретически, в системе с запаздыванием, минимальное время регулирования 
Руководствуясь таблицей можно утверждать, что наибольшее быстродействие обеспечивает П-закон управления. Однако, если коэффициент усиления П-регулятора  мал (чаще всего это наблюдается в системах с запаздыванием), то такой регулятор не обеспечивает высокой точности регулирования, т. к. в этом случае велика величина статической ошибки. Если имеет величину равную 10 и более, то П-регулятор приемлем, а если мал (чаще всего это наблюдается в системах с запаздыванием), то такой регулятор не обеспечивает высокой точности регулирования, т. к. в этом случае велика величина статической ошибки. Если имеет величину равную 10 и более, то П-регулятор приемлем, а если  то требуется введение в закон управления интегральной составляющей. то требуется введение в закон управления интегральной составляющей.
Наиболее распространенным на практике является ПИ-регулятор, который обладает следующими достоинствами:
1. Обеспечивает нулевую статическую ошибку регулирования;
2. Достаточно прост в настройке, т. к. настраиваются только два параметра, а именно коэффициент усиления и постоянная интегрирования  . В таком регуляторе имеется возможность оптимизации . В таком регуляторе имеется возможность оптимизации  , что обеспечивает управление с минимально возможной среднеквадратичной ошибкой регулирования; , что обеспечивает управление с минимально возможной среднеквадратичной ошибкой регулирования;
3. Малая чувствительность к шумам в канале измерения (в отличии от ПИД-регулятора).
Для наиболее ответственных контуров можно рекомендовать использование ПИД-регулятора, обеспечивающего наиболее высокое быстродействие в системе. Обнако следует учитывать, что это условие выполняется только при его оптимальных настройках (настраиваются три параметра). С увеличением запаздывания в системе резко возрастают отрицательные фазовые сдвиги, что снижает эффект действия дифференциальной составляющей регулятора. Поэтому качество работы ПИД-регулятора для систем с большим запаздыванием становится сравнимо с качеством работы ПИ-регулятора. Кроме этого, наличие шумов в канале измерения в системе с ПИД-регулятором приводит к значительным случайным колебаниям управляющего сигнала регулятора, что увеличивает дисперсию ошибки регулирования и износ исполнительного механизма. Таким образом, ПИД-регулятор следует выбирать для систем регулирования, с относительно малым уровнем шумов и величиной запаздывания в объекте управления. Примерами таких систем является системы регулирования температуры.
При выборе типа регулятора рекомендуется ориентироваться на величину отношения запаздывания к постоянной времени в объекте  . Если . Если  то можно выбрать релейный, непрерывный или цифровой регуляторы. Если то можно выбрать релейный, непрерывный или цифровой регуляторы. Если  , то должен быть выбран непрерывный или цифровой, ПИ- или ПИД-регулятор. Если , то должен быть выбран непрерывный или цифровой, ПИ- или ПИД-регулятор. Если  , то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот же регулятор рекомендуется применять и при меньших отношениях . , то выбирают специальный цифровой регулятор с упредителем, который компенсирует запаздывание в контуре управления. Однако этот же регулятор рекомендуется применять и при меньших отношениях .
6.3 Формульный метод определения настроек регулятора
Метод используется для быстрой, приближенной оценки значений параметров настройки регулятора для трех видов оптимальных типовых процессов регулирования.
Метод применим как для статических объектов с самовыравниванием (таблица 2.2), так и для объектов без самовыравнивания (таблица 2.3).
Таблица 5.
| Регулятор
|
Типовой процесс регулирования
|
| апериодический
|
с 20% перерегулированием
|

|
| И
|

|

|
|
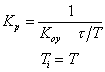
| П
|
|
|
|
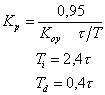
| ПИ
|
|
|
|
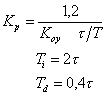
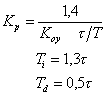
| ПИД
|
|
|
|
где T, ,  – постоянная времени, запаздывание и коэффициент усиления объекта. – постоянная времени, запаздывание и коэффициент усиления объекта.
В этих формулах предполагается, что настраивается регулятор с зависимыми настройками, передаточная функция которого имеет вид:
 , (6) , (6)
где – коэффициент усиления регулятора, – время изодрома (постоянная интегрирования регулятора),  – время предварения (постоянная дифференцирования). – время предварения (постоянная дифференцирования).
Таблица 6.
| Регулятор
|
Типовой процесс регулирования
|
| апериодический
|
с 20% перерегулированием
|

|
| П
|

|

|
-
|
| ПИ
|

|

|

|
| ПИД
|

|

|

|
|