Введение
Рост мирового торгового флота и увеличение скоростей и тоннажа судов привели к значительному повышению интенсивности судоходства. Если оценивать, весьма приближенно это понятие числом судов, одновременно находящихся в море, то нетрудно показать, что оно возрастает значительно быстрее численного состава мирового флота. Так, при увеличении среднего эксплуатационного времени с 0,4 до 0,6 интенсивность судоходства возрастает практически вдвое.
Аварийность мирового флота остается очень высокой, практически каждое четвертое судно валовой вместимостью 500 peг. тонн и более, – ежегодно терпит аварию. Улучшение подготовки командного состава, более жесткое международное техническое нормирование, внедрение современных электрорадионавигационных систем, регулирование судоходства – позволили снизить процент аварийности.
Все морские суда или их обслуживание связано с использованием судов и работой людей на море, т.е. в условиях повышенного риска, вызванного не только использованием различной техники в необычных условиях, когда неизбежны ошибки, просчеты, усталость людей и отказы техники, но и воздействие стихии на человека. Полностью исключить воздействие морских рисков практически невозможно, т. к. не все они зависят от воли и предусмотрительности людей.
Естественно, что государства весьма заинтересованы в том, чтобы свести до минимума потери людей и материальных ценностей в процессе возрастающего использования Мирового океана. В связи с этим они сотрудничают друг с другом и с международными организациями с целью выработки международно-правовых актов, которыми определяются технические и правовые стандарты для конструирования и постройки морских судов, их безопасной эксплуатации, комплектования экипажем, предотвращение аварий, поиска и спасения, терпящих бедствие на море людей и судов.
Унифицированные международные стандарты по безопасности мореплавания, выраженные в виде конвенций, типовых условий, резолюций – становятся составной частью национального морского права, направленного на обеспечение безопасности человеческой жизни на море.
Немаловажную роль в обеспечении безопасной навигации судна имеет всесторонняя проработка предстоящего перехода, – что и является целью данного дипломного проекта. В этом дипломном проекте прорабатывается предстоящий переход судна типа «Днепр» по маршруту «Пирей – Барселона».
1. Сведения о судне
1.1 Общие сведения о судне
Однопалубное, двухвинтовое судно с тремя грузовыми трюмами, с двойными бортами и двойным дном, предназначенное для перевозки угля, леса, генеральных грузов и контейнеров.
Название – «Днепр 3»
Позывной – URAD
Год постройки – 1989
Класс регистра – М-СП
Порт приписки – Херсон
Длина наибольшая (в метрах) – 115,8
Длина между перпендикулярами – 111,2
Ширина – 13,41
Высота борта – 6,0
Осадка в полном грузу – 4,2
Осадка порожнем – 1,1
При стандартном варианте балластировки – 2,61
Водоизмещение в полном грузу (в тонах) – 5025
Порожнем – 1873,1
Регистровый тоннаж брутто (в регистровых тоннах) – 3086
Нетто – 925 т
Дедвейт (в тонах) – 3152
Эксплуатационная скорость (в узлах) – 9
в балласте – 11
Тип мощность главной энергетической установки: ШКОДА 6–27,5 А2L 2 х 700 л.с.
Шаг и дисковое отношение винта, частота его вращения винта – (2х 515 кВт)
Частота его вращения на полном ходу – 1,61\0,947 300
Тип руля – Рули полубалансирные, бортовые 2 шт. – 5 м., средний – 5,8 м.
Тип и мощность рулевой машины 2 К.а 11/15, гидравлическая с номинальным крутящим моментом 110 ИМ/т.
Судовая электростанция: состав, тип, количество и суммарная мощность генераторов, вольтаж судовой сети: дизель-генератор 68160Р1Ч 3 шт., 415 кВт, 390 В; стояночный дизель – генератор – 1 шт., 50 кВт, 400 В;
аварийный дизель-генератор ДГА50Ш9 64 12/14, 50 кВТ, 400 В.
Судовая радиостанция: состав, мощность и дальность действия основной аппаратуры; УКВ «Рейд», УКВ «Кама-Р», УНГ ВЗС-ЮОО, «МР/НР О8С» «Зсапп-1000», главный передатчик «БАРК-2».
Подруливающее устройство. Судно оснащено носовым подруливающим устройством. Мощность приводного электродвигателя подруливающего устройства составляет 160 кВт.
Упор подруливающего устройства 1800 М
Экипаж – 14 человек.
Таблица 1.1 – Циркуляция судна
| Время циркуляции при s = 30° |
| В грузу |
В балласте |
| DКК |
30° |
15° |
DКК |
30° |
15° |
| 10° |
20» |
30» |
10° |
16» |
24» |
| 20° |
32» |
45» |
20° |
24» |
36» |
| 30° |
51» |
54» |
30° |
31» |
48» |
| 40° |
59» |
66» |
40° |
39» |
60» |
| 50° |
66» |
78» |
50° |
46» |
72» |
| 60° |
72» |
89» |
60° |
54» |
84» |
| 70° |
79» |
1'01» |
70° |
61» |
96» |
| 80° |
90» |
1'13» |
80° |
69» |
1'08» |
| 90° |
98» |
1'21» |
90° |
76» |
1'20» |
| 120° |
1'15» |
1'57» |
120° |
99» |
1'56» |
| 150° |
1'43» |
1'90» |
150° |
1'21» |
1'92» |
| 180° |
1'68» |
2'81» |
180° |
1'44» |
2'28» |
| 270° |
2'49» |
3'82» |
270° |
2'11» |
3'36» |
| 360° |
3'25» |
4'71» |
360° |
2'78» |
4'44» |
| ДЦ
|
1,8 кб |
2,6 кб |
ДЦ
|
1,1 кб |
1,5 кб |
Опасная полоса движения ±27,1 м от траектории движения.

0 1,1 1,5 2 Дц
кб.
Рисунок 1.1 – Циркуляция судна в балласте

0 1,8 2,6 Дц
кб.
Рисунок 1.2 – Циркуляция судна в грузу
1.2 Навигационное оборудование
Сведения о технических средствах судовождения (ТСС) приведены в соответствии с [13] в таблицах 1.3, 1.4, 1.5.
Таблица 1.3 – Технические средства навигации
| Прибор, система |
Тип, марка |
Кол-во |
Место установки |
| САРП |
«Стандарт» |
1 |
Верхний мостик, ходовая рубка, гиропост |
| Авторулевой |
«Печора» |
1 |
| Магнитный компас |
«КМ-100–1» |
1 |
| Эхолот |
«НЭЛ–МЗБ» |
1 |
| Гирокомпас |
«Вега» |
1 |
| Радиолокационная станция |
«Наяда» |
1 |
| Радиолокационная станция |
«Печора» |
2 |
| Радиопеленгатор |
«Рыбка» |
1 |
| Главный приемник |
«Шторм-2» |
1 |
| Радиостанция |
«Рейд» |
1 |
| Аварийный комплекс |
«Серена» |
1 |
| Индукционный лаг |
«ИЭЛ-2М» |
1 |
| Секстант навигационный |
«СНО-Т» |
2 |
| Хронометр |
ГОСТ 8916–58 |
1 |
| Часы морские |
МСТУ55–372–61 |
6 |
| Секундомер |
С1–2А ГОСТ 5072–62 |
2 |
| Барометр анероид |
ТУ23–04–1616–72 |
2 |
| Приемоиндикатор РНС |
«КПИ-5ф» |
1 |
| Приемоиндикатор СНС |
«СН-3102» |
1 |
Магнитный компас «КМ-100–1»
(усовершенствованный компас магнитный) используется наряду с гирокомпасом в качестве курсоуказателя, а также для определения места судна в море по пеленгам.
В комплект входят: котелок с картушкой, который заполнен жидкостью – раствором этилового спирта в дистиллированной воде крепостью 43°.Жидкость такого состава не замерзает при температурах – 26 °С, пеленгатор, нактоуз, магниты и мягкое железо для устранения девиации, умформер донного освещения компаса.
Гирокомпас «Вега»
– гирокомпас с жидкостным подвесом чувствительного элемента. Он рассчитан на широту j
= 60°. Точность показаний зависит от условий плавания и составляет на прямом курсе ±1°. Учет скоростной погрешности производится с помощью таблиц в планшет-корректоре или с помощью специальной линейки скоростной девиации.
Гирокомпас имеет воздушное принудительное охлаждение, которое обеспечивает нормальную работу прибора при температуре наружного воздуха от –20 °С до +40 °С. Рабочая температура поддерживающей жидкости +39° – +40 °С. Критическая температура поддерживающей жидкости +58 °С. Гирокомпас приходит в меридиан через 4–6 часов. Устройства для ускоренного приведения в меридиан прибор не имеет. Питание от сети переменного тока напряжением 220 В или постоянного тока 110 или 220 В. Потребляемая мощность не более 1,5 кВт.
РЛС «Наяда»
имеет следующие основные параметры.
Максимальная дальность обнаружения судна водоизмещением 3000 т равна 10 милям; среднего морского буя – 1,8 мили.
Минимальная дальность обнаружения объектов при высоте антенны 15 м над уровнем воды равна 35 м.
Разрешающая способность по дальности на шкалах 0,5 и 3 мили равна 30 м; на других шкалах – 90 метров. Разрешающая способность по азимуту на шкалах 0,5 и 3 мили составляет 3°; на шкалах 6,12 и 24 мили – 1,7°.
Длительность излучаемого импульса составляет: на шкалах 0,5–1,5 и 3 мили 0,1 – 0,13 мкс; на шкалах 6, 12, 24 мили 0,45 – 0,5 мкс.
Частота повторения импульсов равна: на шкалах 0,5 – 1,5 и 3 мили 3000–3400 имп/с; на шкалах 6,12,24 мили 1500–1700 имп/с.
Импульсная мощность передатчика составляет 13 кВт, чувствительность приемника 10-11
– 10-12
Вт.
Ширина диаграммы направленности антенны равна: в горизонтальной плоскости – 1,4°; в вертикальной – 20°.
Антенна вращается с частотой 14–16 об/мин. (см. рис. 1.4).
«Рыбка М»
является слуховым радиопеленгатором (РП) с неподвижными рамками. Он предназначен для пеленгования радиомаяков кругового действия и приема сигналов радиомаяков направленного действия.
Радиоприемная часть пеленгатора обеспечивает прием незатухающих, тонально – модулированных и модулированных (Al; A2; A3) колебаний.
Диапазон частот средневолновой (от 186 до 750кГц). Он разбит на два поддиапазона: I поддиапазон – 186–375 кГц (1600–800 м); II поддиапазон – 375–750 кГц (800–400 м). Полоса пропускания приемника 2 кГц.
РП полностью сохраняет работоспособность: при температуре воздуха от –30 до +50 °С, при относительной влажности воздуха до 95%, при колебании напряжений питания на лампах до 10% номинальных значений.
Прибор рассчитан на непрерывную работу в течении 6 ч с последующим перерывом на 1 ч. Потребляемая мощность от сети переменного тока не более 65 Вт, от источников постоянного тока напряжением 110–220 В-не более 150 В. (см. таблицу 1.5).
Гидродинамический лаг «ЛГ-2М»
имеет пределы измерения от 3 до 25 узлов. В лаге предусмотрена возможность ввода относительных поправок в показания скорости: постоянной, относительной до 10% измеряемой скорости; переменной в пределах от 0 до 10% измеряемой скорости.
Питание лага осуществляется однофазным переменным током напряжением 110 В, частотой 50 Гц. Питание лага от бортовых сетей с другими данными осуществляется через соответствующие преобразователи. Лаг имеет внутриприборную защиту от создаваемых им радиопомех.
Конструкция лага обеспечивает непрерывную работу приборов в течение не менее 2000 ч. При этом допускается замена отдельных электроэлементов без последующей регулировки лага.
Навигационный эхолот «НЭЛ – МЗБ»
предназначен для измерения и автоматической записи профиля дна при скоростях хода судна до 20 уз, бортовой качке до 10°. Килевой – до 1,5°.
Эхолот может выдерживать:
1) длительные отклонения напряжения судовой сети на ±5% и частоты на 3% от их номинальных значений;
2) температуру окружающей среды в интервале от –20 до +40 °С;
3) вибрации частотой 10 Гц и амплитудой 1,4 ± 0,2 мм;
4) пребывании в окружающей среде с относительной влажностью 95 ± 3% и температурой +20 ± 5 °С. температурой +20 ± 5 °С.
Диапазон измеряемых глубин от 1 до 2000 м.
Эхолот рассчитан на скорость распространения звука в воде 1500 м/с. Время готовности эхолота к работе 1 миh. Питание производится переменным током 127 В частотой 50Гц.
Приемоиндикатор (ПИ) импульсно-фазовой РНС «Лоран С» «КПИ-5ф»
обеспечивает работу по сигналам станций, уровень которых превышает уровень шумов, т.е. когда возможен визуальный поток сигналов цепочки на экране электронно-лучевой трубки (ЭЛТ). После окончания поиска сигналов и установки их вручную в соответствующие точки развертки включается схема автослежения, которая будет автоматически измерять радионавигационный параметр с точностью до 0,3 мкс.
Дальность действия по поверхностным радиосигналам ночью 500–700 миль, днем 1 тыс. – 1,2 тыс. миль. Использование пространственных сигналов допустимо лишь при плавании в открытом море; в этом случае дальность достигает 2,3 тыс. миль.
Авторулевой «Печора»
позволяет удерживать судно на заданном курсе при скорости от 6 уз и выше с точностью на спокойной воде – до 0,3°, при волнении – до 1,0°. Он также позволяет выполнять маневрирование при прохождении в узкостях и при швартовке.
Авторулевой (АР) обеспечивает управление в следующих режимах: автоматический; циркуляция (изменение курса судна с заданной угловой скоростью); следящий; простой (дистанционный); ручной (местный).
Навигационная радиолокационная станция «Печора»
предназначена для повышения безопасности мореплавания и решения навигационных задач судовождения.
РЛС «Печора» выдает радиолокационную информацию о надводной обстановке в зоне кругового обзора и позволяет определять координаты береговых и надводных объектов (дальность, курсовые углы и пеленги), местоположение своего судна относительно береговых и надводных ориентиров, курс своего судна.
Технические характеристики:
- максимальная дальность обнаружения судна водоизмещением 3000 т – не менее 10 миль, среднего морского буя не менее 2 миль;
- минимальная дальность обнаружения (мертвая зона) морского буя не более 30 м;
- разрешающая способность по дальности на шкале 0,4 мили – не более 25 м, по ширине диаграммы направленности антенны в горизонтальной плоскости – не более 1,0°;
- максимальная погрешность дальномерного устройства на шкалах дальности 0,4–1,6 мили – не более 50 м, на шкалах дальности 4–24 мили – не более 1% соответствующей шкале дальности;
- максимальная погрешность угломерного устройства – не более 1,0°;
- диаметр экрана индикатора – 180 мм;
- время приведения станции в рабочий режим с момента ее включения – не более 4 минут.
Приемоиндикатор спутниковой навигационной системы «СН – 3102»
предназначен для решения прямой и обратной геодезических задач на референц-эллипсоиде, решения прямой и обратной задач счисления пути и параметров движения с оценкой точности. Система предназначена для обработки навигационной информации для получения оптимальных оценок параметров движения, вождения объекта по линии заданного пути.
Таблица 1.4 – Девиация магнитного компаса
| КК через 10º |
Девиация (d
º) |
ККчерез 10º |
Девиация (d
º) |
| 10º |
+1,7º |
190º |
–2,5º |
| 20º |
+2,1º |
200º |
–2,9º |
| 30º |
+2,2º |
210º |
–3,0º |
| 40º |
+2,2º |
220º |
–3,0º |
| 50º |
+2,2º |
230º |
–3,0º |
| 60º |
+2,1º |
240º |
–2,9º |
| 70º |
+2,0º |
250º |
–2,9º |
| 80º |
+1,8º |
260º |
–2,6º |
| 90º |
+1,5º |
270º |
–2,0º |
| 100º |
+1,2º |
280º |
–1,6º |
| 110º |
+0,8º |
290º |
–1,6º |
| 120º |
+0,4º |
300º |
–1,2º |
| 130º |
+0,1º |
210º |
0,7º |
| 140º |
–0,5º |
320º |
–0,3º |
| 150º |
–0,9º |
330º |
+0,2º |
| 160º |
–1,4º |
340º |
+0,6º |
| 170º |
–1,8º |
350º |
+1,0º |
| 180º |
–2,0º |
360º |
+1,2º |
А
= –0,4º В
= +1,6ºС
= +2,1ºD
= 0 Е
= 0

Рисунок 1.3 – Теневые сектора РЛС «Наяда»
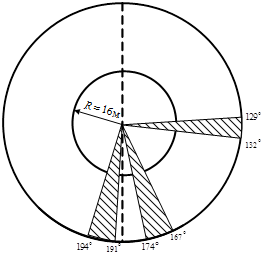
Рисунок 1.4 – Теневые сектора РЛС «Печора»
Таблица 1.5 – Инерционные характеристики судна
| Вид маневра |
В балласте |
В грузу |
| Время, мин. |
Расстояние, кб. |
Время, мин. |
Расстояние, кб. |
| 1 |
2 |
3 |
4 |
5 |
| ППХ – СТОП |
11 |
7 |
13 |
8 |
| ПСХ – СТОП |
10 |
6,5 |
12 |
7,5 |
| ПМХ – СТОП |
8 |
5 |
9 |
7 |
| ПСМХ – СТОП |
7 |
4 |
8 |
6 |
| ППХ – ЗПХ |
5 |
3 |
7 |
3 |
| ПСХ – ЗПХ |
3 |
2,2 |
5 |
2 |
| ПМХ – ЗПХ |
2 |
1,2 |
4 |
1 |
| ПСМХ – ЗПХ |
1 |
1 |
2 |
0,5 |
| СТОП – ППХ |
11 |
9,8 |
16 |
14 |
Таблица 1.6 – Радиодевиации
| ОРКУº |
Девиация (δº) |
ОРКУº |
Девиация (δº) |
| 10º |
0º |
190º |
+0,9º |
| 20º |
+1,0º |
200º |
+1,4º |
| 30º |
+1,8º |
210º |
+2,1º |
| 40º |
+2,6º |
220º |
+2,7º |
| 50º |
+3,3º |
230º |
+3,0º |
| 60º |
+3,6º |
240º |
+3,0º |
| 70º |
+3,3º |
250º |
+2,8º |
| 80º |
+3,0º |
260º |
+2,7º |
| 90º |
+2,3º |
270º |
+2,5º |
| 100º |
+1,3º |
280º |
+2,0º |
| 110º |
0º |
290º |
+1,3º |
| 120º |
–1,6º |
300º |
+0,5º |
| 130º |
–2,4º |
210º |
–0,1º |
| 140º |
–3,0º |
320º |
–0,7º |
| 150º |
–2,9º |
330º |
–1,3º |
| 160º |
–1,6º |
340º |
–1,8º |
| 170º |
–0,4º |
350º |
–2,0º |
| 180º |
–0,2º |
360º |
–2,2º |
Коэффициенты:
А
= ±0,4ºD
= +0,9ºЕ
= +2,3ºВ
= +1,0ºС
= –0,9ºf
= 410 кГц
1.3 Транспортно-эксплуатационные характеристики
Таблица 1.7 – Размещение грузовых трюмов с указанием длины, ширины и высоты
| Грузовые помещения |
Район расположения |
Объем, м |
Длина l
, м |
Ширина В
, м |
Высота h
, м |
Трюм №1
Трюм №2
Трюм №3
|
30–52
52–98
98–145
|
874
1595
1595
∑4064
|
14,2
25,3
25,3
|
10,11
10,11
10,11
|
6,17
6,17
6,17
|

Рисунок 1.5 – Объем и площадь трюмов
Размещение помещений и емкостей для запасов с указанием массы (т) при полной загрузке и координат (м) центра масс: Х – от миделя (к носу «+», к корме «–»); у – от ДП (к правому борту «+», к левому борту «–»); Z – от киля.
Таблица 1.8 – Размещение запасов
| Наименование цистерн |
Район расположения |
Объем,
м
|
Р
, т |
Координаты ЦТ, м |
Момент инерции |
| X
|
Y
|
Z
|
| Дизельное топливо ц. 21 |
144–153 |
31,2 |
30,8 |
–27,45 |
–3,0 |
3,5 |
59 |
| Дизельное топливо ц. 22 л.б |
144–153 |
129 |
118,7 |
–25,94 |
–3,1 |
3,61 |
59 |
| Дизельное топливо ц. 22 пр. б |
144–153 |
28,0 |
25,8 |
–25,8 |
+3,1 |
4,0 |
59 |
| Пресная вода ц. 20 л.б |
190–193 |
29,4 |
29,4 |
–20,23 |
–2,0 |
0,5 |
59 |
| Пресная вода ц. 19 пр. б |
190–193 |
29,4 |
29,4 |
–20,23 |
+2,0 |
0,5 |
59 |
| Масло ц. 24 л.б |
151–160 |
5,8 |
4,5 |
–36,24 |
+1,2 |
4,92 |
59 |
| Заб. ящик ц. 23 пр. б |
160–163 |
8,0 |
– |
–34,32 |
–1,3 |
2,0 |
59 |
| Заб. ящик ц. 24 пр. б |
160–163 |
8,0 |
– |
–33,22 |
+6,2 |
2,0 |
59 |
| Заб. ящик ц. 26 л.б. |
164–168 |
16,3 |
– |
–34,32 |
–6,2 |
2,0 |
59 |
| Подсланевые воды ц. 27 л.б |
181–188 |
12,0 |
1,65 |
–26,62 |
–1,3 |
0,49 |
59 |
| Подсланевые воды ц. 28 пр. б |
181–188 |
12,0 |
0 |
–39,82 |
+1,2 |
2,0 |
59 |
| Фекалии ц. 29 пр. б |
191–195 |
3,0 |
1,65 |
–26,62 |
+1,7 |
6,0 |
59 |
| Питьевая вода ц. 30 л.б |
196–199 |
3,0 |
–54,07 |
–1,6 |
5,0 |
59 |
Таблица 1.9 – Высота надводного борта в соответствии с Международной грузовой маркой
| Минимальный летний надводный борт |
2,04 м |
| Осадка соответствующая минимальному летнему надводному борту |
4,13 м |
| Минимальный зимний надводный борт |
2,12 м |
| Осадка соответствующая минимальному зимнему надводному борту |
4,05 м |
| Допустимая нагрузка на 1м2
палубы / на крышки люков |
6,2/1,75 т/м2
|
| Возвышение центра тяжести порожнего судна над килем и отстояние от миделя (к носу «+», к корме 1,75 т/м2
) |
| Абсцисса центра тяжести (Хg) |
5,148 м |
| Абсцисса центра тяжести (Zg) |
–9,47 м |
1.4 Обеспечение живучести и спасения
Разработке и осуществлению мероприятий по снижению аварийности судов и повышению их живучести уделяется большое внимание. С этой целью выработан ряд международных документов, регламентирующих требования по повышению безопасности мореплавания и живучести судов. К числу важнейших из них относятся: Международная конвенция по охране человеческой жизни на море, международный кодекс морской перевозки опасных грузов, международная конвенция о грузовой марке и др.
Живучесть судна обеспечивается: запасом плавучести и остойчивости, пожарной безопасностью, живучестью судовой техники, подготовленностью экипажа к борьбе за живучесть судна и действиями по ее поддержанию и восстановлению.
Перечень документации для руководства борьбой за живучесть судна:
Наставление по борьбе за живучесть судов.
Расписания по тревогам (общее и стояночное) или инструкция.
Чертежи и схемы (если они предусмотрены технической документацией судна):
- общего расположения помещений судна с указанием трапов и коридоров;
- расположения огнестойких и огнезадерживающих конструкций и закрытий в них;
- расположения вентиляционных каналов, заслонок, мест включения;
- систем пожарной сигнализации;
- систем пожаротушения.
Балластной, осушительной и перепускной систем.
Пожарно-контрольный формуляр (где это требуется правилами пожарной безопасности).
Информация об остойчивости и непотопляемости судна в объеме, предусмотренном правилами Регистра для данного судна.
Описи аварийного и противопожарного снабжения.
На судне имеется станция пожарной сигнализации типа «ТОЛ 10/50с» панель управления, которой, находится на ходовом мостике на кормовой переборке, что соответствует требованиям СОЛАС-74 II/2
Правило 13 п. 1.5 (панель управления станцией должна находиться на ходовом мостике или на центральном пожарном посту), а так же п. 1.6 (панели сигнализации должны указывать луч, в котором сработал автоматический или ручной извещатель). Лучи, которые указывают род срабатываемого извещателя, снабжены сигнальными лампочками. Вблизи панели имеется четкая информация об обслуживаемых помещениях по расположению лучей упомянутых правил. Информация представлена в виде таблицы.
Работа системы обнаружения пожара периодически проверяется в соответствии с пожарными правилами при помощи устройств для получения горячего воздуха соответствующей температуры, на которую должен реагировать автоматический извещатель. Тип извещателей такой, что не требует замены при срабатывании в момент испытания и возвращается в режим «Работа».
Конструкция извещателей удовлетворяет требованиям СОЛАС-74 Правила 13 п. 3. Они стойкие к воздействию колебаний напряжения и переходных режимов питания, к изменению температуры окружающей среды, вибрации, влажности, сотрясений, ударов и коррозии (п. 3.1).
На дымовые извещатели имеется сертификат и акт, которые подтверждают точность срабатывания извещателя до того, как плотность дыма достигнет величины, при которой ослабления света превысит 12,5% на метр, но не раньше, чем плотность дыма достигает величины 2% на метр (п. 3.2).
Тепловые извещатели так же сертифицированы и имеют акт, который подтверждает их точность срабатывания (п. 3.3).
Согласно Правила 52 II/2 система пожарообнаружения расположена так, что обеспечивает обнаружение дыма и наличие ручных извещателей на всех трапах и коридорах на пути эвакуации из жилых помещений.
Система водотушения
Пожарный насос – НЦВ-40/65
Количество – 2 шт.
Производительность – 40 м3
/ч
Напор – 65 м вод. ст
Электродвигатель – АМ61–2
Мощность, кВт – 11
Управление – из рулевой рубки
Система углекислотного тушения
Количество баллонов – 30 шт.
Вместимость баллона – 40 л
Возможность заполнения углекислотой – 30% объема наибольшего трюма
Система пенотушения
Предназначена для тушения небольших очагов пожара МО
Вместимость – 45 л
Воздушно-пенный переносной ствол – 2 шт.
Таблица 1.10 – Станция звуковой сигнализации пожарообнаружения
| № п/п |
Наименование помещений |
| 1 |
Левый борт 145 шп |
| 2 |
Помещение дизель-генераторной станции |
| 3 |
Котельное отделение |
| 4 |
Правый борт 145 шп |
| 5 |
Электроаппаратная |
| 6 |
Под платформой по ДП 133 шп |
| 7 |
Румпельное отделение |
| 8 |
Аккумуляторная |
| 9 |
Радиорубка |
| 10 |
Коридор левого борта 143–144 шп |
| 11 |
Коридор правого борта 143–144 шп |
| 12 |
Агрегатная |
| 13 |
Гирокомпасная |
| 14 |
Прачечная |
| 15 |
Малярная |
| 16 |
Шкиперская |
| 17 |
Плотницкая |
| 18 |
Кладовая |
| 19 |
Электрогенераторная |
| 20 |
Коридор |
| 21 |
Выход из машинного отделения |
| 22 |
Камбуз |
Таблица 2.7 – Сведения о портах, местах укрытия и якорных стоянках
| № п/п |
Наименование |
Адмирал
тейский
№ карты
|
№ лоции и стр. описания |
Местные правила плавания, штормовые сигналы |
| 1 |
Гавань Каламе |
38252 |
Лоция Ионического
моря
|
В гавань входить срединым проходом.
Ширина на фарватере 2 кб, глубина 11 м. Идти курсом 330° на 5W, оконечность о. Алого. Как только св. зн. Сагради прийдёт на пеленг 73°, нужно лечь на него курсом 25°, приведя прямо на косу мыс Калойераки.
Этим курсом следовать до тех пор, пока северная оконечность о. Алого не прийдёт на пеленг 292°.
|
| 2 |
Порт Керкира |
35304 |
Лоция Ионического моря |
В условиях плохой видимости менее 500 м. плавание по каналам запрещено. До получения свободной практики держать поднятым сигнал «Q» (Кэбэк) |
| 3 |
Порт Керкира |
35304 |
Лоция
Ионического моря
№1248
|
Лоцманская проводка в порт обязательна.
Сигнальная станция расположена на полуострове к W от мыса Сидеро вблизи здания маяка. При входе пассажирского судна в порт или выходе его из t порта на мачте сигнальной станции поднимается черный шар.
Якорные места. На якорь можно стать на рейде Керкира на глубинах 18–29 м; грунт здесь твердый ил и тина, якоря держит хорошо.
По донесению, в 3,5 кб. к N0 от мыса Кефаломандуко грунт якоря держит плохо. Лучшее якорное место для военных кораблей находится на рейде между островом Видо и восточной частью южного берега бухты Керкира.
Торговые суда становятся на якорь против здания таможни; глубины на якорном месте 9–18 м.
Карантинное якорное место находится в 3 кб. к S от островка Гувинон; глубина на нем 24 м.
Подводный канализационный трубопровод длиной 7 кб. проложен на NNE от берега в 6 кб. к WNW от мыса Кефаломандуко.
|
| 4 |
Порт Аргостолион |
38250 |
Лоция
Ионического моря
№1248
|
Лоцманская проводка в порт обязательна. При подходе к порту Аргосто-лион ориентирами являются церковь Айос-Христофорос (стр. 78) и церковь, находящаяся к N0 от нее.
Светящий знак (38°11¢N, 20°30¢Е) установлен на восточной кромке отмели, окаймляющей северную часть западного берега бухточки.
|
| 5 |
Порт Закинтос |
32213 |
Лоция Ионического моря
№1248
|
Лоцманская проводка в порт обязательна для иностранных торговых судов.
Навигационное ограждение. На молах порта установлены светящие средства навигационного оборудования.
Район, запретный для якорной стоянки, шириной около 5 кб. тянется вдоль берега от точки, находящейся в 2,7 кб. к N от основания Северного мола, до мыса Крионери. В районе проложены подводные кабели.
Навигационное ограждение. На молах порта установлены светящие средства навигационного оборудования.
Район, запретный для якорной стоянки, шириной около 5 кб. тянется вдоль берега от точки, находящейся в 2,7 кб. к N от основания Северного мола, до мыса Крионери. В районе проложены подводные кабели.
При подходе к порту с NW требуется обойти мыс Крионери, остерегаясь каменистой отмели, его окаймляющей.
Пройдя мыс Крионери, судно не должно становиться на якорь на глубинах менее 27 м.
|
| 6 |
Порт Генуя |
38397 |
Лоция Тирренского моря |
Лоцманская служба: лоцманская проводка осуществляется круглосуточно и только под проводкой лоцмана, осуществляется в порядке очередности и заблаговременно поданных капитанами судов заявок. Станции и сигналы: пост управления движением судов находится на Карантинном молу в районе причала №1, на вершине которой расположена сигнальная мачта. |
| 7 |
Гавань
Ла-Сьота
|
39361 |
Лоция Тирренского моря |
Ширина входа в гавань 0,5 кб. Глубины в ней 5 м. При следовании в гавань с Е, мыс Мотонсос следует оставлять на расстоянии более 2 кб. Предупреждение глубины гавани Ла-Сьота могут отмечаться от глубин, указанных на карте. Светящий знак Авлемон установлен на SE от входа в гавань. |
| 8 |
о. Лемнос
п. Мудрое в бухте
Мудрое
|
33205
38214
|
№1247
Лоция
Эгейского моря
|
В гавань входить средним проходом. Ширина на фарватере 2 кб, глубина 11 м. Идти курсом 330° на оконечность о. Алого. Как только светящий знак Сограда придет на пеленг 273° нужно лечь на курс 25°, приведя прямо по носу мыс Калойраки. |
| 9 |
Гавань
Волос
|
38229
|
Лоция
Эгейского моря
№1247
|
Гавань Волос вдается в западный берег залива Пагатикос между мысом, расположенным в 5,3 мили к W от мыса Ордимнос, и мысом Сарацина, отстоящем на 2,4 мили к 88 от первого мыса. Район запретный для постановки на якорь находится в 3 кб к 88°Е от северной оконечности Гавани Волос. В районе проложены подводные кабели. |
| 10 |
Остров Лесбос |
35261 |
Лоция
Эгейского
моря №1250
стр. 57 – 59
|
Бухта Сигри вдается в западный берег острова Лесбос между мысом, расположенным в 5,3 мили к 8\У от мыса Ордимнос, и мысом Сарацина, отстоящем на 2,4 мили к 880
от первого мыса. Район запретный для постановки на якорь находится в 3 кб к 88Е от северной оконечности острова Сигри. В районе проложены подводные кабели. |
| 11 |
Остров Родос |
38275 |
Лоция
Эгейского
моря №1250
стр. 103–107
|
При постановке на якорь в бухте Трианда следует иметь в виду, что северо-западные ветра разводят в ней сильное волнение. Суда могут становиться на якорь в близи пляжа против селения Неохори. Лучшее якорное место находится против пирса Брусалию |
| 12 |
Якорное место
селение Айия-Пелайия
(о. Макронисос,
Эгейское море)
|
33228,
33240
|
№1247
Лоция
Эгейского моря.
1988 г.
стр. 414.
|
Лучшее якорное место находится по пеленгу 327 на маяк Спати. Глубина на якорном месте 38 м, грунт – глина и песок. Даже при Западном ветре силой 6 – 7 баллов, сопровождающемся сильными шквалами с берега, якоря держат хорошо. |
| 13 |
Якорное место
бухты Парга
(Ионическое
море, о. Керкира)
|
32211 |
№1248
Лоция
Ионического моря
и острова
Сицилия 1978 г.
Дополнение №1 –
1984 г. стр. 155
|
Якорное место находится в западной бухточке Парга в 1,3 кб. к WSW от светящего знака Парга. Глубина на нём 13 м, грунт – ил. Летом, в ясную погоду, суда могут временно становиться на якорь против бухты Парга в 4,5 кб. от развалин крепости Эримокастро по пеленгу 284° на мыс Келадьо. Глубина – 36 м; грунт – ил. |
| 14 |
Якорное место мыса Колонне
(Ионическое
море, залив
Таранто)
|
32311 |
№1248
Лоция
Ионического моря
и острова
Сицилия 1978 г.
Дополнение №1 –
1984 г. стр. 205
|
При знании местных условий плавания можно становиться на якорь к S от мыса Колонне в точке пересечения пеленгов 284° на башню Шифо и 30° на маяк Колонне. Оно защищено от западных и северных ветров. Глубина – 20 м. |
2.6 Выбор пути на морских участках
Выбор пути выполняется на основании анализа всех условий плавания с учётом осадки судна, его мореходных качеств и эксплуатационных требований.
Выбираемый путь должен удовлетворять правовым ограничениям (территориальные воды иностранных государств, запретные и опасные районы и пр.), обеспечивать навигационную безопасность плавания и предотвращение угрозы столкновения с другими судами. Среди вариантов, удовлетворяющих этим требованиям, выбирается наиболее экономичный путь.
Выполним расчёт плавания по дуге большого круга (ортодромии) по заданным координатам.
| Начальная точка: |
Конечная точка: |
| широта |
долгота |
широта |
долгота |
| 6°57,0'S |
14°22,0'W |
50°40,0'S |
60°00,0'W |
1)
Произведём расчёт разности широт и разности долгот:
РШ
=  – –  = 50°40,0' – 6°57,0' = 43°43,0' к S (–2623'); = 50°40,0' – 6°57,0' = 43°43,0' к S (–2623');
РД
= – – = 60°00,0' – 14°22,0' = 45°38,0' к W (–2738'); = 60°00,0' – 14°22,0' = 45°38,0' к W (–2738');
2)
Из таблицы №26, «МТ-75», по значениям начальной и конечной широты, определяем значение меридиональных частей и рассчитываем их разность по формуле:
МЧ
К
= (50°40,0') = 3519,3
МЧ
н
= (06°57,0') = 415,2
РМЧ
= 3104,1
–Рассчитываем «Клок
» по формуле:
  из таблиц из таблиц
«МТ-75» выбираем значение Клок
→
41°25,0' SW = 41,4° SW
переводим в круговое счисление Клок
= 221,4°
–Рассчитываем значение «S
лок
»
по формуле:  3497,8 мили 3497,8 мили
3)
Произведём расчёт элементов ДБК:
a) расстояние, пройденное по ортодромии, рассчитаем по формуле:
cos в = sin  · sin · sin  + cos · cos · cos
( + cos · cos · cos
( –
– ) )
cos D
= 0,121 · 0,77347 + 0,99265 · 0,63383 · 0,69925;
cos
D
= 0,53354 ®D
= 57
°
45,2' = 3465 миль.
Целесообразность движения по ортодромии определяется из условия  по формуле: по формуле:


– значитплавание по ортодромии выгодно:
b) начального курса плавания по ортодромии (от. т. А
):
ctg Кн
= cos
· tg· cosec (
–)
– sin · ctg (
–)
ctg Кн
= 0,99265 · 1,22031 · 1,39884 – (–0,77347) · 0,97813
ctg
Кн
= 1,58083 ® Кн
= 32°19,0'SW = 32,3°SW;
переведём в круговой счёт и получим Кн
= 212,3°;
c) конечного курса плавания по ортодромии:
ctg
Кк
=
– tg · cos · cosec (
) + sin · ctg (
–);
ctg
Кк
= –0,12190 · 0,63383 · 1,39884 + (–0,77347) · 0,97813;
ctg
Кк
=
-0,64847 ®Кк
= 57°02,0'SW = 57,0°SW;
переведём в круговой счёт и получим Кк
= 237,0
°
;
d) проверяем правильность расчета D
и Кн
по формулам их. расчетам по ТВА – 57. Такая проверка (расчет D
и Кн
по ТВА-57) возможна только при D
< 5400 миль (90°)
Таблица – Расчёт D
и Кн
по ТВА-57
 S
S
|
50°40,0' |
Т(
)
|
72454 |
| РД W
|
45°38,0' |
S (
рд)
|
3107 |
Т(
рд)
|
70917 |
| X
S
|
60°11,0' |
Т(х)
|
75561 |
S (x)
|
6069 |
 S
S
|
6°57,0' |
T(р)
|
64848 |
| y=90°+(6°57,0'-60°11,0') |
143°14,0' |
S (y)
|
1926 |
Т
(у)
|
68194 |
| Кн
|
32°18,4'=32,3°→212,3° |
Т
(Кн
)
|
66774 |
S (Кн
)
|
1461 |
| h
|
32°16,4'(90° –32°16,4')=57°43,6'=3463,6' |
T
(h)
|
66733 |
Для нашего примера: D
= 3465
миль (Ф
)  3463,6 мили (Т
); 3463,6 мили (Т
);
Кн
= 212,3°(Ф
)= 212,3°(Т
) – их расчёт выполнен правильно.
4)
Рассчитаем значения «Ко
» и «l
о
»:
a)
 ; ;
б)

в)
+ = 6°57,0' + 50°40,0') = 57°37,0';
г)
– = 50°40,0' – 6°57,0') = 43°43,0';
|
lg
tg =
|
9,62398 |
| + = 57°37,0' |
lg
sin =
|
9,92659 |
| – = 43°43,0' |
lg
cosec =
|
0,16046 |
| lgtg
(37°11' – lо
) |
=
|
9,71103®т. 5а «МТ-75»®27°13,0' |
l
о
=
37°11'
–
27
°
13
,0 =
9°58
,0
'
W
д)
(λн
– λо
) =
14°22,0' – 9°58
,0
' = 4°24,0'
lg tg
(6°57,0')
Ig
cosec
(4°24,0')
|
9,08600
1,11510
|
| lg ctg Ко
|
0,20110 ® 32°11,0'S
W
|
Переведём в круговой счёт и получим: К
o
= 212,2°
.
Таким образом, определили значения «Ко
» и «l
о
»:
l
о
= 9°58
,0
'
W
; Ко
=
212
,
2
°.
| № |
Заданная долгота ( ) ) |
( ) )
 =9°58,0' =9°58,0'
|
lg sin
()
|
Ig ctg Ko
(Ko
= 32°11,0')
|
lg tg
 |
Широта промеж. точек () |
| 1 |
19°58,0' |
10° |
9,23967 |
0,20110 |
9,44077 |
15°25' S |
| 2 |
29°58,0' |
20° |
9,53405 |
0,20110 |
9,73515 |
28°31' S |
| 3 |
39°58,0' |
30° |
9,69897 |
0,20110 |
9,90007 |
38°28' S |
| 4 |
49°58,0' |
40° |
9,80807 |
0,20110 |
0,00917 |
45°36' S |
| 5 |
59°58,0' |
50° |
9,88425 |
0,20110 |
0,08535 |
50°36' S |
5)
Рассчитываем значения координат вертекса:
 = 90° –К
o
= 90° – 32°11,0' = 57°49'S = 90° –К
o
= 90° – 32°11,0' = 57°49'S
 = =  = 9°58,0 +90° = 99°58,0'W = 9°58,0 +90° = 99°58,0'W
| № |
Заданная долгота () |

(=99°58,0'W)
|
lg cos
 |
lg tg
(=57°49'S)
|
lg tg
|
Широта промеж. точек () |
| 1 |
19°58,0' |
80° |
9,23967 |
0,20110 |
9,44077 |
15°25' S |
| 2 |
29°58,0' |
70° |
9,53405 |
0,20110 |
9,73515 |
28°31' S |
| 3 |
39°58,0' |
60° |
9,69897 |
0,20110 |
9,90007 |
38°28' S |
| 4 |
49°58,0' |
50° |
9,80807 |
0,20110 |
0,00917 |
45°36' S |
| 5 |
59°58,0' |
40° |
9,88425 |
0,20110 |
0,08535 |
50°36' S |
Убеждаемся, что расчёты «» выполнены правильно
2.7 Подготовка технических средств навигации
Подготовка судовых технических средств навигации к работе в рейсе выполняется в соответствии с инструкцией по их эксплуатации. С приходом аппаратуры в рабочее состояние, проверяются ее технические параметры. Аппаратура считается в рабочем состоянии, если ее параметры в рабочем режиме соответствуют техническим условиям завода-изготовителя, устанавливаются или уточняются поправки приборов. Также приборы укомплектовываются ЗИПом (обязательно).
Рабочее состояние технических средств проверяется следующим образом:
· для гирокомпаса – постоянством контрольных пеленгов береговых ориентиров, если за время стоянки он не выключается;
· для приемоиндикатора СНС наличием индикации данных о последних обсервациях;
· для приемоиндикатора РНС – постоянством отсчетов навигационного параметра.
В печатающих устройствах проверяется наличие бумаги, включаются тумблеры датчиков и видов печати, делается контрольная распечатка, устанавливается выбранный интервал печати для портовых вод. Кроме того, устанавливаются показания времени реверсографа, делается контрольная распечатка, на курсограмме делается отметка времени.
Проверяется наличие времени, бумага в эхолоте и при необходимости устанавливается сигнализация опасной глубины. Выбираются датчики информации навигационного комплекса или видеопрокладчиков, очищается оперативная память ЭЦВМ.
Включается сигнализация автоматического контроля для удержания судна в заданной полосе движения.
Ограничения характерные для технических средств испособов навигации.
Магнитный компас
. Недостатком магнитного компаса является то, что девиация меняется с изменением широты района плавания и перевозимым грузом. Правильность табличных значений девиаций контролируется путём сличения показаний магнитного и гироскопических компасов. Девиация уничтожается по необходимости (с обязательным составлением таблицы девиации), как правило, не реже одного раза в год. Остаточная девиация у главного магнитного компаса не должна превышать -3о
, а у путевого -5о
Гирокомпас
. Основным недостатком гирокомпаса является возможность неожиданного ухода из меридиана. Достоверность информации гирокомпаса следует систематически контролировать путём сличения его показаний с показаниями магнитного компаса. Сличения выполняются каждый час, а при приближении к опасности – чаще. Постоянная поправка гирокомпаса определяется после: длительной стоянки судна; смены гиросферы или поддерживающей жидкости в основном приборе; ремонта периферийных приборов; выявления изменения поправок; периодически, во время плавания судна. Расхождение времени по курсограмме не должно превышать 10 минут за вахту. Если при разовом определении поправки в рейсе её величина отличается от учитываемой более чем на 2о
или средняя величина 4–5-ти определений поправок отличается от постоянной поправки более чем на 1о
, следует принять меры к выяснению причин такого расхождения.
Лаг
. Основным недостатком гидродинамического лага «ИЭЛ-2М» это возможность попадания в трубку «Пито» воздуха, что создает так называемую воздушную подушку, что препятствует нормальной работе лага. В этом случае воздух необходимо «стравить» через перепускной клапан. Поправки лага должны быть определены с точностью до 0,3% для полного и малого хода.
Радиолокационная станция
. РЛС имеет большие систематические погрешности угломерного устройства. Также недостатком РЛС является значительный разброс дальности обнаружения объектов в зависимости от гидрометеоусловий и наличия теневых секторов. Если теневые секторы находятся впереди траверза, необходимо периодически отворачивать с курса для их просмотра. Поправки угломерного и дальномерного устройства определяются на стоянке судна по точечным ориентирам. Радиодевиация определяется и компенсируется не реже одного раза в год.
Эхолот
. Поправка эхолота, определяется, путём сличёния глубин, измеренных эхолотом, с глубинами, измеренными ручным лотом по обоим бортам судна в районе установки вибраторов. Перед измерением глубин проверяют частоту вращения исполнительного двигателя эхолота и «разбивка» ручного лота.
Хронометр
. Поправка хронометра определяется ежесуточно, по возможности в одно и то же время, с точностью до 0,2 секунды. По последовательным значениям поправок хронометра ежесуточно вводится ход хронометра, который не должен превышать 4-х секунд при суточной вибрации хода до 2,5-й секунд. Ход секундомера проверяется по хронометру. Часы и лента реверсографа согласовываются с хронометром один раз в сутки. Допустимое расхождение не более 20 секунд.
Приёмоиндикаторы РНС
. При работе приёмоиндикаторов РНС любого типа не исключена возможность погрешности при определении грубой дорожки. При этом обсервации на карте хорошо согласуются со счислениями по компасу и лагу, препятствуя обнаружению ошибки. Правильность информации приёмоиндикатора РНС контролируется обсервациями, периодически выполняемыми с помощью других технических средств. При этом возможно проверка индикатора каждого канала РНС путём определения линий положения, параллельных изолиний радионавигационного параметра нанесённых на радионавигационную карту.
Приёмоиндикаторы СНС
. В приёмоиндикаторах СНС необходимо учитывать погрешность, обусловленную различием систем координат, в которых работает СНС и составлена карта.
Обслуживание судового навигационного оборудования включает в себя комплекс мероприятий направленных на обеспечение в период навигации, постоянной готовности и безотказной работе.
При внешнем техническом осмотре проверяют состояние и исправное дверок, блокировок, крепления, окраски и амортизации.
При внутреннем осмотре проверяют состояние и исправность монтажных проводов, и их крепление, механической прочности, деталей узлов, и блок систем, контактов поверхностей и остальных разъемов.
Во время технических осмотров, выполняемых при включенной аппаратуре проверяют соответствие показаний всех измерительных приборов номинальным значениям, контролируют исправность ламп и полупроводниковых приборов.
Таблица 2.8 – Технические средства навигации
| Прибор, система |
Тип, марка |
СКП измерения Н.П. |
Градиент НП |
| Магнитный компас |
«КМ-100–1» |
±1,5° |
 |
| Радиопеленгатор |
«Рыбка» |
±2,0° |
 |
| Гирокомпас |
«Вега» |
±0,5° |
|
| Радиолокационная станция |
«Наяда» |
1,0% |


|
| Эхолот |
«НЭЛ-МЗБ» |
±1,5% |
-
|
| Лаг |
«ИЭЛ – 2М» |
±0,25 уз. |
- |
| Приемоиндикатор РНС |
«КПИ – 5Ф» |
0,15 ф.ц.
(по фазовому)
±2,5 мили (по импульсному)
|
- |
| Приемоиндикатор СНС |
«СН-3102» |
0,05 мили
0,2 мили
|
 |
2.8 Подъём карт
При плавании вблизи берегов, опасных в навигационном отношении районах, в узостях целесообразно сделать подобранные на переход карты более удобными и наглядными для ведения прокладки, или, как говорят, произвести подъем карты. Подъем карты производится следующим образом:
1. Наносят карандашом отрезки дуг дальности видимости маяков с учетом высоты глаза наблюдателя, на которых надписывают характеристику огня маяков. Опасные секторы маяков заштриховывают красным карандашом. На некоторых иностранных картах такие дуги для стандартной высоты глаза наблюдателя наносятся уже при печати.
2. Отмечают красным карандашом те изобаты, которые судоводитель не намерен пересекать.
3. Наносят опасный угол, опасную дистанцию, ограждающие опасности. На них делают соответствующие пояснительные надписи.
4. Отмечают кружком искусственные створы, которые могут быть использованы во время плавания. Если нет искусственных, то намечают, если это возможно, и проводят естественные, сопровождая их соответствующими надписями.
5. Выделяют карандашом та карте те участки береговой черты и береговые переметные ориентиры, которые хорошо просматриваются на экране РЛС. Однако это следует делать только в результате неоднократных наблюдений.
6. Возле радиомаяков выписывают их характеристики, дальность и время работы; надежные секторы помечают красным карандашом.
7. Намечают красным карандашом опасные для плавания районы, проходящие вблизи с проложенной линии пути.
8. Отмечают на карте карандашом направление и скорость постоянных течений.
9. При наличии в данном районе приливных течений на свободной поверхности карты составляя табличку с основными элементами прилива на ориентировочное время прихода в этот район.
10. При плавании в узостях с большим количеством плавучего ограждения выписывают характеристику имеющихся буев.
Работа по подъему карты хотя и трудоемка, но значительно облегчает работу судоводителя при плавании.
2.10 Естественная освещённость
Естественная освещённость влияет на безопасность плавания, как об этом свидетельствует аварийная система. Расчёт освещённости выполняется двумя последовательными приближениями. Вначале по широтам и гринвичским датам планируемого плавания выбирают из МАЕ, без интерполяции, моменты местного среднего времени восхода и захода солнца, а также восхода и захода луны. По определённой дате предполагаемого места на полдень каждых суток моменты восхода захода Солнца и Луны определяют судовое время этих моментов. Затем, для предвычисленных мест судна, рассчитывают по МАЕ момент явлений, характеризующих освещённость.
По широте места судна и склонению Солнца на моменты его восхода и захода по таблице 20 МТ-75 рассчитываются азимуты Солнца при его восходе и заходе. На каждые сутки плавания по маршруту рассчитываются возраст и фаза Луны. Все рассчитанные элементы освещённости заносятся в таблицу 2.10
Таблица 2.10 – Естественная освещённость
| Дата |
Начало навигационных сумерек
(час. мин.)
|
Тс

|
А
|
Тс

|
А
|
Конец навигационных сумерек
(час. мин.)
|
Тс

|
В

|
Ф
|
Тс

|
| 22.11 |
07.37 |
07.23 |
67,6º |
16.05 |
67,8º |
18.47 |
09.29 |
9 |
 |
16.24 |
| 23.11 |
07.40 |
07.29 |
69,6º |
16.00 |
69,8º |
18.40 |
10.32 |
10 |
|
17.18 |
| 24.11 |
07.54 |
07.35 |
70,3º |
15.53 |
70,6º |
18.36 |
11.22 |
11 |
|
18.28 |
| 25.11 |
07.59 |
07.48 |
70,4º |
15.50 |
70,6º |
18.28 |
11.58 |
12 |
|
19.47 |
| 26.11 |
08.05 |
07.54 |
70,1º |
15.44 |
70,4º |
18.25 |
12.24 |
13 |
|
21.11 |
| 27.11 |
08.11 |
07.59 |
70,6º |
15.39 |
70,4º |
18.13 |
12.43 |
14 |
|
22.36 |
| 28.11 |
08.20 |
08.02 |
70,3º |
15.29 |
70,6º |
18.08 |
12.59 |
15 |
|
24.00 |
| 29.11 |
08.24 |
08.08 |
70,3º |
15.25 |
70,6º |
18.01 |
13.13 |
16 |
|
00.10 |
2.11
Приливные явления
Учитывая то, что величины приливоотливных явлений на всей акватории районаплавания, незначительны, расчёт приливов выполняется только для портов назначения на 5 суток планируемой стоянки. Время наступления полных и малых вод и их высоты для основных и дополнительных пунктов определяются по таблицам приливов, а результаты расчёта заносятся в таблицу 2.11
Поскольку в Таблицах приливов порт Барселона не указан, расчет приливов сделан на ближайший порт, порт Марсель.
Таблица 2.11 – Приливы п. Барселона
| Утренние воды |
Вечерние воды |
| Дата |
ПВ |
МВ |
ПВ |
МВ |
| Тс |
h |
Тс |
h |
Тс |
h |
Тс |
h |
| 29.11 |
10.05 |
0,3 |
04.45 |
0,1 |
22.00 |
0,6 |
16.16 |
0,2 |
| 30.11 |
10.44 |
0,2 |
05.11 |
0,2 |
22.38 |
0,5 |
16.50 |
0,2 |
| 01.12 |
11.25 |
0,2 |
05.31 |
0,2 |
23.17 |
0,5 |
- |
- |
| 02.12 |
00.05 |
0,1 |
05.56 |
0,2 |
12.18 |
0,4 |
17.32 |
0,3 |
| 03.12 |
01.03 |
0,1 |
06.54 |
0,3 |
13.28 |
0,4 |
18.20 |
0,3 |
2.
12
Оценка точности места
Навигационная безопасность мореплавания обеспечивается счислением пути судна и периодическими обсервациями только с учетом их точности, которая традиционно оценивается среднеквадратической погрешностью СКП (M), вероятность которой составляет Р = 63%.
Однако «Стандартами точности судовождения» ИМО для оценки точности текущего (счислимого) места судна принята вероятность Р = 95%. Этому требованию практически удовлетворяет круг радиусом R = 2М (мили).
Требования к точности судовождения при плавании в любой зоне, допустимое время плавания по счислению, значения СКП измерения возможных на переходе навигационных параметров, а также формулы для расчёта СКП счисления, СКП счислимого места возможных обсерваций приведены в таблицах 2.12 и 2.13
Таблица 2.12 – Расчёт СКП места судна
| Характеристика места судна |
Формула для расчета радиальной (круговой) средней квадратической погрешности места судна |
Примечание |
| Счислимое место судна |
 , (мили) , (мили) |
МО
– СКП последней, принятой к счислению обсервации (мили);
МСt
– СКП счисления (мили).
|
| СКП счисления пути судна |
(+)  , (мили), при t
< 2 ч , (мили), при t
< 2 ч
(+)  , (мили), при t
> 2 ч , (мили), при t
> 2 ч
|
КС
– коэффициент точности счисления в данном районе, рассчитываемый по невязкам в счислении;
t
– время плавания по счислению, (ч).
|
| Обсервованное по двум пеленгам на два ориентира место судна (2П
, 2РЛП
, 2РП
) |
 , (мили) , (мили) |
 – CКП измерения пеленга (град.); – CКП измерения пеленга (град.);
q
– разность пеленгов на ориентиры (£ 90°);
D1
, D2
– расстояния от обсерво-ванного места до 1-го (D1
) и 2-го (D2
) ориентира, (мили).
|
| Обсервованное место по пеленгам на три ориентира (3П
) |

или  , (мили) , (мили)
|
– CКП измерения пеленга (град.);
D1,2,3
– расстояние в милях до 1-го (D1
), 2-го (D2
) и 3-го (D3
) ориентира (мили);
a
,
b
– углы между пеленгами на ориентиры (град.);
МО2
– СКП обсервации по двум пеленгам (мили).
|
| «Крюйс-пеленг» |
 , (мили) , (мили) |
МО
– СКП в определении места по 2-м пеленгам (мили);
МСt
– СКП в счислении за время между П1
и П2
(мили);
q
– разность пеленгов (град.).
|
| Обсервованное место по пеленгу и расстоянию до одного ориентира (П
и DР
) |
 , (мили) , (мили) |
– СКП измерения пеленга (град.);
mD
– СКП измерения расстояния до ориентира (мили);
D
– расстояние до ориентира (мили).
|
| Обсервованное место по расстояниям до двух ориентиров (2D
) |
(х)  , (мили) , (мили) |
q
– угол между направлениями на ориентиры (град.);
mD1,2
– СКП измерения расстояний (мили);
При mD1
= mD2
= mD
–
 (мили). (мили).
|
| Обсервованное место по расстояниям до трех ориентиров (3D
) |
 , (мили) , (мили) |
mD
– СКП измерения расстояния до ориентира, (мили);
q
– угол между направлениями на ориентиры (град.)
|
| «Крюйс-расстояние» |
 , (мили) , (мили)
|
МО
– СКП определения места по расстояниям до двух ориентиров (мили) (х);
МСt
– СКП счисления за время между D1
и D2
(+);
q
– угол между ЛП1 и ЛП2 в точке пересечения D
1
и D2
(град.)
|
Обсервованное место по двум горизонтальным углам трех ориентиров
(2 ÐÐ)
|
 , (мили) , (мили) |
D1,2,3
– расстояния от обсервованного места до 1, 2 и 3 ориентира (мили);
 – СКП измерения углов (угл. мин); – СКП измерения углов (угл. мин);
d1-2
, d2-3
– расстояния между ориентирами, (мили);
q
– угол пересечения линий положения (град.)
|
| Обсервованное место по горизонтальному углу между ориентирами и пеленгу на один из них (другой закрыт для взятия на него П
º) |
 , (мили) , (мили) |
a
– измеренный горизонтальный угол (град.);
m
a
– СКП измерения угла (угл. мин.);
– СКП измерения пеленга (град.);
D2
– расстояние до ориентира закрытого для пеленгования (мили);
d1-2
– расстояние между ориентирами, (мили)
|
| Обсервованное место по горизонтальному углу между двумя ор-ми и расстоянию до одного из них (при сомнении в ∆К
) |
 , (мили) , (мили) |
m
a
– СКП измерения горизон-тального угла (угл. мин.);
mD
– СКП измерения расстояния, (мили);
D1
, D2
– расстояние до ориентиров, (мили);
d
– расстояние между ориентирами, (мили)
|
| Обсервованное место по пеленгу на ориентир и высоте светила (П
и h
) |
 , (мили) , (мили) |
mh
– СКП измерения высоты светила (угл. мин.);
– СКП измерения пеленга на ориентир (град.);
D
– расстояние до ориентира, (мили);
q
– угол пересечения линий положения (град.)
|
| Обсервованное место по секторным РМКАМ
или РНС с использованием радионавигационных карт |
 , (мили) , (мили)
или  , (мили) , (мили)
|
mЗН
– СКП в определении Орт.П
(знаков);
m
U
– СКП измерения радионавигационного параметра (мкс., ф.ц);
Δ – разность оцифровки соседних гипербол, между которыми находится обсервованное место (зн., мкс, ф.ц);
L
– расстояние в милях между этими гиперболами у обсервованного места (кратчайшее), мили
|
| Обсервованное место по спутниковой РНС (ЗНИСЗ) |
 |
m
r
– CКП определения расстояния до НИСЗ;
hСР
– средняя угловая высота НИСЗ;
ΔA
– разность азимутов между парами НИСЗ;
Г
– геометрический фактор

|
Таблица 2.15 – Требования к точности судовождения
| Зона плавания судна |
Радиальная СКП определения места |
Частота обсерваций |
Допустимое время обработки навигационных параметров |
| Зона стесненного плавания: |
· Акватория портов, гаваней |
5¸20 м |
непрерывно |
мгновенно |
| · Узкие (100¸200 м) каналы, фарватеры |
0,15 их ширины |
1¸5 мин. |
0,5¸1 мин. |
| Прибрежная зона*: |
· Фарватеры, шириной 2¸20 кб. |
0,2 их ширины |
1¸5 мин. |
0,5¸1 мин. |
| · СРДС |
0,2 ширины полосы движения (1¸5 кб.) |
10¸30 мин. |
1¸3 мин. |
| · Рекомендованные пути в расстоянии до 25 миль от берега |
2% от расстояния до берега, но
не > 2 миль
|
20¸30 мин. |
1¸3 мин. |
| · Рекомендованные пути в расстоянии > 25 миль от берега |
не > 2 миль |
1¸2 часа |
5¸10 мин. |
| Зона открытого моря |
2% от расстояния до навигационной опасности, но
не > 2 миль
|
2¸4 часа |
10¸15 мин. |
Таблица 2.16 – Допустимое время плавания по счислению (мин.) для Кс
= 1,2
| Дистанция до опасности |
Требуемая точность (мили)
с Р
= 95%
|
Погрешность последней обсервации МО
с (Р
= 95%), мили |
| 0,0 |
0,1 |
0,25 |
0,5 |
1,0 |
2,0 |
| максимально допустимый интервал от последней обсервации (мин) |
| 10 |
0,4 |
12 |
12 |
9 |
– |
– |
– |
| 20 |
0,8 |
28 |
28 |
27 |
22 |
– |
– |
| 30 |
1,2 |
42 |
48 |
47 |
44 |
27 |
– |
| 40 |
1,6 |
72 |
72 |
71 |
68 |
56 |
– |
| 50 |
2,0 |
100 |
100 |
99 |
97 |
87 |
– |
| 60 |
2,4 |
132 |
132 |
131 |
129 |
120 |
73 |
| 70 |
2,8 |
168 |
168 |
167 |
165 |
157 |
118 |
| 80 |
3,2 |
208 |
208 |
207 |
206 |
198 |
162 |
| 90 |
3,6 |
252 |
252 |
251 |
250 |
242 |
210 |
| 100 |
4,0 |
300 |
300 |
299 |
298 |
291 |
260 |
При плавании в прибрежной зоне обсервация считается приемлемой, если ее точность в 3 раза и более выше точности счислимого места. В этом случае ее принимают к счислению
Таблица 2.17 – Вероятность обнаружения подходного буя в зависимости от точности места и расстояния до буя
СКП места
М (мили)
|
Дальность обнаружения буя (мили) |
Если СКП текущего места не превышает 1 мили, то обеспечивается высокая (>0,95) вероятность обнаружения буя как с помощью РЛС, так и визуально |
| 2,5 |
3,0 |
3,5 |
4,0 |
4,5 |
5,0 |
| 0,5 |
≈1 |
≈1 |
≈1 |
≈1 |
≈1 |
≈1 |
| 1,0 |
0,956 |
0,989 |
0,982 |
0,997 |
≈1 |
≈1 |
| 1,5 |
0,753 |
0,865 |
0,934 |
0,973 |
0,989 |
0,9963 |
Таблица 2.18 – Значение коэффициента Кр
2
в зависимости от заданной вероятности (Рзад
) при неизвестных элементах эллипса погрешностей
| Рзад
|
0,900 |
0,950 |
0,960 |
0,980 |
0,990 |
0,993 |
0,997 |
0,999 |
| Кр2
|
1,53 |
1,73 |
1,8 |
2,0 |
2,15 |
2,23 |
2,41 |
~3,0 |
Предельная (с Рзад
) погрешность места судна рассчитывается по формуле:

где М
– СКП места судна.
2.14 Графический план перехода
Перед выходом в море судоводитель должен подготовить к плаванию штурманскую часть. Выяснив цель перехода, конечный и промежуточные пункты захода судна, ориентировочные сроки плавания, штурман приступает к составлению плана перехода. Этот план включает в себя:
¨ общие расчеты плавания – ходовое время, скорости на переходе, время стоянки для грузовых операций и т.п.;
¨ предварительную прокладку;
¨ справочные материалы на переход.
Для составления плана перехода и осуществления плавания необходимо проверить имеются ли на судне все необходимые карты и книги района предстоящего плавания. Если карты и книги частично или полностью отсутствуют, необходимо их получить в навигационной камере порта или в пароходстве. Карты и книги подбираются по «Каталогу карт и книг». Все пособия должны быть откорректированы по извещениям мореплавателей на день плавания. Одновременно проверяются и готовятся инструменты и приборы – компасы, лаги, секстаны, радиолокаторы и т.д.
Общие расчеты плавания производятся на генеральной карте и по таблицам расстояний. Исходя из этих расчетов, судно принимает необходимые запасы топлива, продовольствия, воды
Чтобы иметь готовыми справочные материалы, делаются выписки сведений, которые потребуются на переходе. Из лоций выписывают данные о навигационных опасностях, характерных приметных местах, естественных ориентирах, сведения о течениях, приливах. Из руководства «Огни и знаки» характеристики маяков, огней, которые будут использованы судоводителем для обсервации или ориентировки.
Прокладка курсов дается с таким расчетом, чтобы они проходили дальше от навигационных опасностей, или так, чтобы возможность получения обсервации в любых условиях видимости надежно обеспечивала безопасный проход в непосредственной близости от опасностей, когда это требуется обстоятельствами плавания. Таким образом, стремление судоводителя пройти по кратчайшему расстоянию между двумя портами ограничивается требованием безусловного обеспечения безопасности плавания.
Скорость на переходе не всегда будет соответствовать экономической. Она может меняться в зависимости от конкретных условий плавания. Если обязательный проход сложных в навигационном отношении районов в темное время суток или в плохую видимость при наличии радиолокатора не обеспечивается достаточным числом надежных ориентиров, то следует так рассчитать время выхода и скорость на переходе, чтобы эти районы проходить в светлое время суток, при хорошей видимости.
Учитывая мореходные качества своего судна или буксируемых судов, ограничения Регистра Украины по метеорологическим условиям плавания, следует предусмотреть возможность якорных стоянок, захода в пункты укрытия и т.п.
Предварительная прокладка делается по генеральным картам с учетом гидрометеорологических условий района и периода плавания. В процессе выполнения навигационной прокладки судоводитель определяет по карте путь или истинный курс судна, расстояние, проходимое судном по этому курсу. Он рассчитывает по снятому с карты пути или истинному курсу компасный курс и поправку компаса, выписывает время на хождения на курсе и моменты подхода к точкам поворота на новый курс, время открытия ориентиров и отсчеты компасных пеленгов открытия, время подхода к якорным местам, лоцманским и сигнальным станциям и т.п.
На переходе возможны отклонения от предварительной прокладки. Однако эта прокладка остается основой, которой надлежит придерживаться в плавании. Результаты всей предшествующей работы оформлены в виде графического плана перехода на картах. На карты нанесены линии пути судна, с указанием участков, проходимых в светлое и тёмное время суток; контрольные точки поворотов. У каждого участка пути надписано значение истинного курса, плавание этим курсом (мили).
На линии пути нанесены точки начала суток (по ТС
) и точки, соответствующие восходу и заходу Солнца, так же обозначены точки, соответствующие времени восхода и захода Луны (с указанием её фазы).
Дугами окружностей, пересекающие линию пути судна отмечена дальность видимости маяков для высоты ходового мостика (е = 9 м).
Карты – ксерокопии (в количестве 4 штук: – 2 генеральные карты; – пролив Босфор – порт Барселона) находятся в конце пояснительной записки.
Вывод
В практике морского судоходства наивыгоднейшим (оптимальным путем) между двумя заданными точками является тот путь, который данное конкретное судно при сложившейся гидрометеорологической обстановке проходит за кратчайшее время при минимальной затрате ресурсов, обеспечении безопасности мореплавания и сохранности перевозимых грузов. В то, же время при выполнении конкретных переходов могут задаваться частные критерии оптимальности. Выбор критериев оптимального маршрута перехода определяется поставленной перед судном задачей. По навигационным и метеорологическим пособиям и картам изучается район предстоящего перехода, в особенности – его гидрометеорологические характеристики, вероятные погодные условия, вероятность опасных явлений (сильный шторм, плавучие льдины и айсберги, обледенение, плохая видимость и др.), глубина и навигационные опасности, система передачи навигационной и гидрометеорологической информации, радиотехнические СНО, основные пути движения судов, организация проводки судов береговыми гидрометеоцентрами (БГМЦ) или научно-исследовательскими судами погоды (НИСП). На основе этих данных и квалифицированной оценки всех факторов производится выбор наивыгоднейшего маршрута перехода.
Важнейшей функцией судовождения является обеспечение навигационной безопасности плавания, т.е. предотвращения аварий и происшествий, обусловленных ошибками решения задач морской навигации.
С организационно-технической точки зрения все задачи обеспечения навигационной безопасности подразделяются на две большие группы, решаемые в ходе предварительной подготовки к переходу и решаемые непосредственно в процессе плавания судна.
Предварительная подготовка к переходу имеет важное практическое значение: анализ показывает, что значительная часть навигационных аварий и происшествий была предопределена заранее – отсутствием или недостаточной эффективностью такой подготовки. Наиболее творческой частью предварительной подготовки является проработка предстоящего перехода, включая выбор наивыгоднейшего маршрута, выполнение предварительной прокладки, предварительные навигационные расчеты, планирование перехода и методов контроля за местоположением и движением судна.
Изучение района плавания в полном объеме выполняется перед выходом в первое плавание по заданному маршруту; перед повторным рейсом по ранее изученному маршруту уточняются данные связанные с изменениями в навигационной обстановке, и учитывается опыт, полученный в предыдущих работах. Предварительную прокладку выполняют на генеральных, путевых (в том числе радионавигационных) и частных картах наиболее удобного масштаба; при этом используют информацию карт и планов наиболее крупного масштаба, которая может содержать важные навигационные данные. Одновременно с предварительной прокладкой выполняют «подъем» (графическую подготовку) навигационных карт, т.е. выделение и / или нанесение на карту в наиболее удобной графической форме наиболее важной оперативной информации (ограждающие изобаты и отдельно лежащие опасности); ведущих, контрольных и ограждающих изолиний с указанием видимости навигационных ориентиров, секторов огней и секторов опасных курсов; границ зон действия систем УДС, точек подачи маршрутной информации и др. Полнота и тщательность выполнения предварительной прокладки во многом определяют качество контроля за местоположением и движением судна в рейсе.
Список литературы
1. Аксютин Л.Р. Грузовой план судна. – Одесса: Бахва А.О., 1996, -146 с.
2. Ермолаев Г.Г. Морская лоция. 4-е изд., перераб. и доп. – Москва: Тр-рт, 1982, -392 с.
3. Зурабов Ю. Особенности применения ГСНС в интересах морских потребителей. Доклад на Международной конференции по радионавигации: «Планирование глобальной радионавигации». – М.: 1992.
4. Информация об остойчивости и прочности судна для капитана. – Киев: Регистр СССР, 1978, – 783 с.
5. Каманин Л.А. Штурман флота. Справочник по кораблевождению. Под ред. А.Н. Мотрохова – Москва: Воениздат, 1986, – 539 с.
6. Козырь Л.А. Справочник судоводителя по навигационной безопасности плавания. – Одесса: Маяк, 1983, –173 с.
7. Кораблевождение. Практическое пособие для штурманов. – Ленинград: ГУН и ОМО, 1972, – 646 с.
8. Концепция создания дифференциальной подсистемы СНС ГЛОНАСС для гражданских потребителей стран СНГ – Утверждена Межгосударственным советом. – Москва: Радионавигация, 1997, – 72 с.
9. Лесков М.М., Баранов Ю.К., Гаврюк М.И. Навигация. – Москва: Тр-рт, 1980, – 344 с.
10.МАРПОЛ 73/78 ИМО, Лондон, 1992.
11.Мельник В.Н. Эксплуатационные расчёты мореходных качеств судна. – Москва: Транспорт, 1990, – 141 с.
12.Мехов В.В., Умин Г.Т., Хваталин В.А. Радионавигационные системы. Военно-морские учебные заведения. 1982, – 455 с.
13.Никольский Л.П. Техническое черчение и судостроительные чертежи. – Ленинград: Судостроение, 1977, –160 с.
14.РШСУ – 98. – Одесса: Юж. НИИМФ, 1998, – 111 с.
15.Позолотин Л.А., Торский В.Г. Международные конвенции, кодексы, рекомендации ИМО и МОТ. – Одесса: ОГМА, 1998, – 110 с.
16.Справочник капитана дальнего плавания. Под общ. ред. Г.Г. Ермолаева. – Москва: Транспорт, 1988, – 247 с.
17.Снопков В.И. Перевозка грузов морем. – Москва: Транспорт, 1986, – 312 с.
18.Юдович А.Б. Предотвращение навигационных аварий морских судов. – Москва: Транспорт, 1982, – 224 с.
19.Якушенков А.А. и др. Новые технические средства судовождения. Под ред. А.А. Якушенкова. – Москва: Транспорт, 1973, – 263 с.
|