| Сибирский государственный университет путей сообщения
Дипломный проект
по специальности «Подъемно-транспортные, строительные, дорожные машины и оборудование»
Тема: Разработка стенда для вывешивания и сдвига рельсошпальной решетки
Пояснительная записка
ДП.21.00.00.00 ПЗ
2010
Содержание
Введение
1 Анализ конструкций оборудования для вывешивания и сдвига рельсошпальной решетки
2 Разработка стенда
2.1 Геометрическая компоновка рабочего оборудования на раме
2.2 Расчет усилий вывешивания и сдвига бесстыкового пути
2.3 Конструирование элементов стенда
3 Порядок проведения работ
4 Экономический расчет
5 Охрана труда
Заключение
Список использованных источников
Приложение А Распечатка усилий в опасных сечениях стержней
Приложение Б Напряжения в узлах стержней
Приложение В Перемещение в узлах стержней
ВВЕДЕНИЕ
Для механизации балластировочных, щебнеочистительных и выправочно-подбивочных работ используют специализированные машины непрерывного и циклического действия. Одними из основных операций при выполнении указанных путевых работ, является подъемка и выправка пути, производимые с помощью специальных рабочих органов - подъемно-рихтующих устройств (ПРУ).
ПРУ позволяет производить вывешивание путевой решетки на высоту Hвыв
в продольном профиле, сдвиг на величину Sсдв
в плане и перекос hвоз
по уровню (возвышение небазового рельса над базовым в кривых участках пути) [4].
Технологический процесс подъемки и выправки путевой решетки представлен на рисунке 1.

Рисунок 1 – Технологический процесс подъемки и выправки путевой решетки
На балластировочных машинах (ЭЛБ-3МК, ЭЛБ-3ТС, МПП-5) подъемно-рихтовочное устройство производит вывешивание путевой решетки, для обеспечения подачи и разравнивания балласта под шпалами с помощью других рабочих органов.
На щебнеочистительных машинах (ЩОМ-4М, СЧ-600, СЧУ-800РУ) с помощью подъемно-рихтовочного устройства производится вывешивание решетки, для размещения под ней элементов щебнеочистительного оборудования. Кроме того, осуществляется постановка решетки в положение, обеспечивающее возможность пропуска других машин по реконструируемому пути.
На выправочно-подбивочных машинах (ВПО-3000, ВПО-З-3000, ВПР-1200, ВПР-02, ВПРС-500, ПМ-600, ВПМА-01) с помощью контрольно-измерительной системы происходит измерение положения путевой решетки и последующее формирование команд управления подъемно-рихтующим устройством, которое переместит и установит путевую решетку в требуемое (проектное) положение. Решетка в выправленном положении закрепляется посредством подачи балласта под шпалы и его уплотнения с помощью других рабочих органов машины.
Машины с путеподъемными и выправочными устройствами используют в комплекте с другими машинами или как самостоятельные средства. При работе в комплекте балластировочные и щебнеочистительные машины находятся в голове цепочки машин, а выправочно-подбивочные выполняют заключительные работы. К последним предъявляют более жесткие требования. Это связано с тем, что работы этих машин на заключительном этапе предшествуют открытию перегона для движения поездов [13].
Производительность машин, используемых при комплексной механизации путевых работ, определяется производительностью головной машины. В свою очередь для машин, у которых операции по перемещению решетки совмещены по времени с выполнением других операций, производительность определяется наиболее энергоемким процессом. Путеподъемные и выправочные устройства не должны снижать производительность машины. При современных технологиях она должна быть не ниже 2,5...3 км/ч для машин непрерывного и 0,3...0,5 км/ч для машин циклического действия. В случае выполнения работ только по смещению решетки производительность существенно повышается и составляет 5...10 км/ч и 1,5...2 км/ч соответственно для машин непрерывного и циклического действия.
На балластировочных и щебнеочистительных машинах путеподъемные устройства обеспечивают условия для эффективного выполнения основных операций (подведение балласта под решетку, его очистка). Здесь не требуются высокие скорости изменения положения решетки и высокая точность ее постановки в требуемое положение [4].
Рабочие скорости вывешивания и сдвига решетки составляют 0,005...0,01 м/с. С большей скоростью работают выправочные устройства, особенно на машинах циклического действия. Опыт эксплуатации машин непрерывного действия показывает, что скорости должны быть повышены до 0,015...0,03 м/с.
Важными параметрами для балластировочных машин являются величины вывешивания и сдвига решетки. Для современных условий производства работ они должны составлять 0,3....0,45 м. Увеличение вывешивания и сдвига дает возможность более эффективно использовать машины. Например, при производстве балластировочных работ, подъемку пути на требуемую высоту можно осуществить за один проход.
На выправочно-подбивочных машинах различают суммарные величины вывешивания и сдвига решетки и величины вывешивания и сдвига при выправке пути. Для более эффективного использования машин по выправке пути и расширения сфер их применения величины вывешивания решетки должны составлять 100...150 мм. Существенное сглаживание неровностей пути достигается уже при вывешивании решетки на 30...50 мм. Поэтому вывешивание и сдвиг решетки при выправке пути должны быть не менее 50 мм.
Наиболее жесткие требования к выправочным устройствам предъявляют по точности постановки решетки в требуемое положение и продолжительности отработки команд. Точность постановки решетки по уровню должна быть ±2 мм. Время отработки команд - 1,5...3 с.
Применение в балластировочных машинах автоматических систем с целью более точной постановки решетки в требуемое положение дает заметный эффект, если применяются устройства для закрепления решетки в смещенном положении.
Точность постановки решетки в требуемое положение во многом зависит от конструкции рельсовых захватов. Они должны обеспечивать надежный захват и удержание решетки на всех участках пути. Зона захвата рельса при этом должна быть минимальной длины.
1 АНАЛИЗ КОНСТРУКЦИЙ ОБОРУДОВАНИЯ ДЛЯ ВЫВЕШИВАНИЯ И СДВИГА РЕЛЬСОШПАЛЬНОЙ РЕШЕТКИ
По ряду важных технических показателей машины с путеподъемными и выправочными устройствами не полностью соответствуют производственно-техническим требованиям эксплуатационников. Основными причинами этого являются несовершенство конструкций устройств и недостаточно полная изученность процессов выправки пути. Такие показатели машин, как производительность и точность постановки решетки в требуемое положение, можно повысить за счет изменения компоновки узлов и привода механизмов выправочного устройства, совершенствования рельсового захвата и его подвески [4].
Для расширения сферы применения машин и более точной постановки решетки в требуемое положение на некоторых машинах путеподъемные устройства должны перемещаться вдоль фермы машины. Расположение ПРУ в пролете машины зависит от вида путевых работ. Так, путеподъемные устройства балластировочных и щебнеочистительных машин устанавливают в местах, где необходимо наибольшее вывешивание решетки, обеспечивающее работу других устройств (например, щебнеочистительного), или где требуемое вывешивание достигается наименьшей силой. Устройства выправки на выправочно-подбивочных и рихтовочных машинах располагают ближе к задней тележке с целью фиксации решетки в требуемом положении.
Также, от расположения ПРУ зависит точность постановки решетки при входе машины в кривую и при выходе из нее.
На балластировочных машинах, вследствие большой загрузки балластом передней части решетки, напряжения в рельсах выше, чем в той части, которая находится за захватом. Поэтому путеподъемное устройство целесообразно располагать не по центру свободного пролета, а со смещением к задней тележке. Соотношение расстояний между передней тележкой и захватом l1
и между захватом и задней тележкой l2
рекомендуется принимать l1
: l2
= 1 : 0,83.

Рисунок 2 – Схема расположения ПРУ в пролетах машин
а – двухпролетный балластер; б – выправочно-подбивочно-рихтовочная машина
Путеподъемные устройства работают с опиранием на ферму машины или на балластную призму (рисунок 3).

Рисунок 3 – Виды опор ПРУ
а - ПРУ с опорой на ферму машины; б – ПРУ с опорой на балластную призму
На машинах применяют маятниковые (рисунок 4) и консольные подвески (рисунок 5) рельсовых захватов с электромеханическим и гидравлическим приводами.
При электромеханическом приводе в многочисленных соединениях элементов устройства появляются износовые зазоры. Кроме того, для предотвращения заклинивания подвески захватов при переносе решетки предусмотрены технологические зазоры между контактными роликами механизма сдвига и вертикальной тягой. В электромагнитных рельсовых захватах имеется зазор между ребордой опорно-рихтующего ролика и головкой рельса.
Высокая инерционность системы и наличие многочисленных зазоров снижают точность постановки решетки в требуемое положение и вызывают необходимость снижения рабочей скорости машины.
С целью повышения быстродействия системы на выправочно-подбивочных машинах непрерывного действия используют реверс-редукторы с электромагнитными муфтами. В электромагнитных захватах применяют специальные рихтующие ролики. Применение гидропривода повысило эффективность работы выправочных и путеподъемных устройств.
 
Рисунок 4 – Кинематическая схема ПРУ ВПО-3000
1, 10 – параллелограммная подвеска; 2 – указатель; 3, 8, 14 – червячный редуктор подъема и сдвига; 4, 7, 13 – реверс-редуктор; 5, 6, 12, 16 – электродвигатель; 9, 25 – ходовой ролик; 11 – каретка; 15 – ходовой винт; 17 – червячный редуктор рихтующих роликов; 18 – двуплечий рычаг; 19, 28, 29 – направляющая; 20 – рихтующий ролик; 21, 23 – электромагнит; 22 – опорный ролик; 24 – поперечная балка; 26 – упорный каток; 27 – квадрат; ЭМП, ЭМЛ, ЭМТ – электромагнитные муфты реверса и тормозов
Используемые на машинах маятниковые и консольные подвески рельсовых захватов имеют и другие недостатки. Так, при маятниковой подвеске (по типу ВПО-3000) изображенной на рисунке 4, механизм сдвига решетки расположен по высоте на значительном расстоянии от рельсового захвата. Это увеличивает время выбора зазоров и мощность на сдвиг и вывешивание решетки. Более удачной является подвеска на машине ВПО-3-3000, кинематическая схема которой приведена на рисунке 6. Консольная подвеска захватов по типу ВПР-1200 работает эффективно лишь при малых величинах вывешивания и сдвига решетки (30...50 мм).
Важным узлом в путеподъемных и выправочных устройствах является рельсовый захват. На машинах применяют в основном электромагнитные (рисунок 7) и роликовые (рисунок 8) захваты. От надежности захвата и удержания решетки в процессе работы существенно зависит производительность и точность постановки решетки в требуемое положение. При сбросе захватом решетки требуется дополнительное время на перезарядку рабочих органов и устранение перекосов решетки. В результате снижаются производительность и точность постановки решетки.

Рисунок 5 – Кинематическая схема ПРУ ВПР-02
1 – гидроцилиндр подъема пути; 2 – вертикальная направляющая; 3 – кронштейн; 4 – гидроцилиндр привода захватов; 5 – балансир; 6 – захватные ролики; 7 – рихтующий гидроцилиндр

Рисунок 6 – Кинематическая схема ПРУ ВПО-3-3000
1 – гидроцилиндр подъема пути; 2 – реактивный кронштейн; 3 – гидроцилиндр сдвига пути; 4 – электромагнитные роликовые захваты; 5 – рихтующие ролики; 6 – траверса; 7 – центральная балка; 8 - шарнирный узел крепления центральной балки и реактивного кронштейна
Сброс решетки электромагнитным захватом происходит по нескольким причинам. На пути с асбестовым балластом происходит налипание металлических включений к магниту. Электромагнитное поле рассеивается, подъемная сила захвата уменьшается. Необходима очистка пространства в зоне рельса от балласта.

Рисунок 7 – Электромагнитный рельсовый захват
1 – электромагнитная катушка; 2 – опорный ролик; 3 – корпус электромагнита

Рисунок 8 – Роликовый рельсовый захват
1 – гидроцилиндр привода захвата; 2 – рихтующий ролик; 3 – захватный ролик
Одной из причин сброса решетки является также неравномерность нагрузок на катушки по длине захвата. При изгибе решетки наибольший ее прогиб смещается в сторону более длинного свободного пролета и практически может находиться вне рельсового захвата. В результате задние катушки нагружаются больше, чем передние и это способствует отрыву от рельса всего магнита. Отрыву захвата способствует также неравномерность зазоров по его длине между нижней пластиной магнита и головкой рельса. По концам захвата они больше, чем в середине. Выравнивание нагрузок на катушки и равномерность зазоров можно обеспечить использованием секционных рельсовых захватов небольшой длины. При односекционном захвате эти недостатки можно устранить применением одноконсольного захвата. Консоль у захвата должна быть только с задней стороны.
Отрыв захвата от рельса происходит также вследствие неудачной конструкции подвески корпуса захвата к поперечной балке. Усилие на перемещение захвата вдоль рельса передается в верхней части его корпуса. При увеличении сопротивления перемещению захвата (особенно на стыках) создается дополнительный момент, разворачивающий магнит в вертикальной плоскости относительно переднего ролика. Это способствует отрыву захвата от рельса. Указанный недостаток можно устранить присоединением подвески к нижней части его корпуса. При такой конструкции существенно уменьшается момент, разворачивающий магнит. С этой же целью можно использовать захват с несимметричным расположением катушек относительно его подвески. Повышает надежность работы электромагнитного захвата также использование дублирующих рельсозахватных роликов.
Роликовые захваты используются в основном на машинах циклического действия. Они приводятся в действие при остановке машины во время рабочего цикла. В настоящее время делается попытка использования этих захватов на машинах непрерывного действия. Однако разработанные конструкции имеют ряд недостатков. В частности, не отработана конструкция, надежно удерживающая решетку в вывешенном состоянии при проходе рельсовых стыков. Не предусмотрены устройства для регулировки зазоров между роликами и рельсами в случае использования машин на путях с различным типом рельсов или при износе роликов. Как и в электромагнитных захватах, наиболее нагруженными являются ролики со стороны меньшего свободного пролета. В конструкции захвата должны быть предусмотрены устройства, выравнивающие нагрузки по его длине на захватных и рихтующих роликах. Нагрузки на один захватный ролик находятся в пределах 25...30 кН, на рихтующий ролик - 10...15 кН [10].
Надежность работы роликов зависит от их конструкции и взаимного расположения. Для свободного прохода захватами кривых участков пути и наибольшего вывешивания решетки с меньшим усилием необходимо захватывать рельс на небольшой длине. Однако сближение роликов может привести к тому, что оба комплекта захватных роликов будут находиться на рельсовой накладке. Надежность захвата и удержания решетки при этом резко снижается.
Конструкции захватов должны обеспечивать возможность прохода машиной кривых участков пути и участков с изменением ширины колеи, без заклинивания роликов. Особенно это важно в устройствах с электромеханическим приводом [4].
Следует отметить, что усовершенствование захватов делается с учетом типа машины и условий производства работ. Так, многосекционные захваты целесообразно применять на машинах с большими свободными пролетами (балластировочные и щебнеочистительные машины). На машинах с малой базой захваты должны быть небольшой длины и иметь дублирующие элементы.
2 РАЗРАБОТКА СТЕНДА
2.1 Геометрическая компоновка рабочего оборудования на раме
Основу стенда составляет удлиненная рама грузовой платформы (рисунок 9), состоящая из двух боковых балок и двух хребтовых изготовленных из двутавра № 60 с переменным по высоте сечением.

Рисунок 9 – Грузовая платформа
Длина рамы стандартной платформы была увеличена на 10250 мм и составляет 23650 мм, для того чтобы обеспечить базу стенда Lм
=19950 мм.
ПРУ взято с выправочно-подбивочной машины ВПР-02 и смонтировано с опорой на раму стенда Кинематическая схема ПРУ представлена на рисунке 5.
Как уже говорилось в аналитическом обзоре, расположение подъемно-рихтовочного устройства в пролете путевых машин зависит от типа машины и ее назначения. У щебнеочистительных и балластировочных машин ПРУ расположено в середине пролета, а у выправочно-подбивочных машин ПРУ находится ближе к задней тележке. Схема компоновки подъемно-рихтовочного устройства на раме стенда изображена на рисунке 10.

Рисунок 10 – Общая схема компоновки лабораторного стенда
Проектируемый мной в дипломном проекте лабораторный стенд будет иметь переднюю стационарную тележку и заднюю перемещаемою вдоль рамы стенда.
Задняя тележка фиксируется в одном из трех возможных положений, для этого на раме стенда дополнительно находятся еще две шкворневых балки. При максимальной базе платформы Lм
= 19950 мм, ось ПРУ находится в середине пролета как у щебнеочистительных и балластировочных машин. При минимальной базе платформы Lм
=14570 мм, ось ПРУ расположена на расстоянии 4595 мм, что равнозначно расположению ПРУ у машины ВПР-02.
2.2 Расчет усилий вывешивания и сдвига бесстыкового пути
2.2.1 Расчет усилий вывешивания
2.2.1.1 Расчетный случай №1
Исходные данные: длина защемленного рельса в пролете стенда L: 18,1м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой передней тележки ар
: 9,05 м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой задней тележки bp
: 9,05 м; величины вывешивания путевой решетки Hвыв
, м: 0,01; 0,05; 0,1; 0,15; 0,2; 0,25.
Расчетная схема изображена на рисунке 11.
Рисунок 11 – Расчетная схема №1 к определению усилия вывешивания РШР
Суммарное усилие вывешивания Рсум
, Н [10]:
 , (1) , (1)
где Р - основное усилие вывешивания путевой решетки Р, Н [10]; Рдоп
- дополнительное усилие вывешивания путевой решетки Рдоп
, Н [10].
 , (2) , (2)
где q - погонное сопротивление подъему путевой решетки q, Н/м [10]; Е – модуль упругости рельсовой стали,  Н/м2
[10]; Ix
– момент инерции поперечных сечений двух рельсов относительно главных горизонтальных осей, Iх
= Н/м2
[10]; Ix
– момент инерции поперечных сечений двух рельсов относительно главных горизонтальных осей, Iх
=  м4
[10]. м4
[10].
 , (3) , (3)
где qпр
– погонный вес путевой решетки, qпр
= 6500 Н/м [10]; qб
– погонное сопротивление балласта подъему, qб
= 9500 Н/м [10]; к – коэффициент, зависящий от типа верхнего строения пути, к = 196 Н/м [10].
 Н/м. Н/м.
 Н. Н.
 , (4) , (4)
где кд
– поправочный коэффициент, кд
= 1,2 [10]; дополнительные изгибающие моменты Мда
и Мдб
,  [10]. [10].
 , (5) , (5)
 , (6) , (6)
где Рпр
- продольное усилие растяжения двух рельсовых нитей, Н [10];  - угол поворота рельсов, рад [10]. - угол поворота рельсов, рад [10].
 , (7) , (7)
 . .
 , (8) , (8)
где М1
- реактивный изгибающий момент , [10]; R1
- реактивное усилие, Н [10].
 , (9) , (9)
 , (10) , (10)
 
   . .
 . .
 . .
 . .
Реактивное усилие R2
, Н [10]:
 , (11) , (11)
 Н. Н.
Расчет усилий вывешивания рельсошпальной решетки по формулам (1) – (11) при различных величинах Hвыв
сведен в таблицу 1.
Таблица 1 – Усилия вывешивания РШР при величине L=18,1 м
| Величина вывешивания решетки Hвыв
, м
|
0,05
|
0,1
|
0,15
|
0,2
|
0,25
|
| Погонное сопротивление подъему q, Н/м
|
15990,2
|
15980,4
|
15970,6
|
15960,8
|
15951
|
| Основное усилие подъема решетки Р, Н
|
168376,8
|
191953,7
|
215530,5
|
239107,4
|
262684,2
|
| Реактивное усилие R1
,
Н
|
-60522,9
|
-48645,8
|
-36768,7
|
-24891,5
|
-13014,4
|
| Реактивное усилие R2 ,
Н
|
-60522,9
|
-48645,8
|
-36768,7
|
-24891,5
|
13014,4
|
| Граничный реактивный момент M1 ,
Н м
|
-55593,2
|
1983,1
|
51627,2
|
105237,3
|
158847,5
|
| Угол поворота рельсов в,
рад
|
0
|
0
|
0
|
0
|
0
|
| Продольное усилие растяжения Рпр,
Н
|
86328
|
184428
|
282528
|
380628
|
478728
|
| Дополнительный изгибающий моментМда,
Н м
|
4316,4
|
18442,8
|
42379,2
|
76125,6
|
119682
|
| Дополнительный изгибающий момент Мдб,
Н м
|
4316,4
|
18442,8
|
42379,2
|
76125,6
|
119682
|
| Дополнительное усилие подъема Рдоп,
Н
|
1144,7
|
4890,9
|
11238,7
|
20188
|
31738,9
|
| Суммарное усилие вывешивания Рсум,
Н
|
169521,5
|
196844,6
|
226769,2
|
259295,4
|
294423,1
|
Вывод: из расчетов, приведенных в таблице 1, видно, что при базе платформы 19950 мм, подъемно-рихтовочное устройство сможет произвести вывешивание решетки на величину меньше 200 мм при максимальном усилии на штоках гидроцилиндров вывешивания – 250 кН.
2.2.1.2 Расчетный случай №2
Исходные данные: длина защемленного рельса в пролете стенда L: 15,41 м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой передней тележки ар
: 9,05 м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой задней тележки bp
: 6,36 м; величины вывешивания путевой решетки Hвыв
, м: 0,01; 0,05; 0,1; 0,15; 0,2, 0,25.
Расчетная схема изображена на рисунке 12. Расчет усилий вывешивания рельсошпальной решетки сведен в таблицу 2.
Расчет усилий вывешивания Рсум
произведен по формулам (1) – (11) и сведен в таблицу 2.
Рисунок 12 – Расчетная схема №2 к определению усилия вывешивания РШР
Рисунок-12. Расчётная схема №3.для определения усилий вывешивания
Таблица 2 – Усилия вывешивания РШР при величине L=15,41 м
| Величина вывешивания решетки Hвыв
, м
|
0,01
|
0,05
|
0,1
|
0,15
|
0,2
|
0,25
|
| Погонное сопротивление подъему q, Н/м
|
15998,1
|
15990,2
|
15980,4
|
15970,6
|
15960,8
|
15951
|
| Основное усилие подъема решетки Р, Н
|
135554,8
|
169155,5
|
211156,4
|
253157,3
|
295158,2
|
337159
|
| Реактивное усилие R1
,
Н
|
-49391,5
|
-31019,8
|
-187385,3
|
14909,7
|
37874,5
|
60839,2
|
| Реактивное усилие R2 ,
Н
|
-135580
|
-170542,3
|
-217081,6
|
266772,7
|
319615,5
|
375609,9
|
| Граничный реактивный момент M1 ,
Н м
|
-36238,3
|
33407,9
|
-20202,2
|
207523,6
|
294581,4
|
381639,3
|
| Угол поворота рельсов в,
рад
|
-0,019
|
-0,028
|
-0,673
|
-0,048
|
-0,059
|
-0,069
|
| Продольное усилие растяжения Рпр,
Н
|
7848
|
86328
|
184428
|
282528
|
380628
|
478728
|
| Дополнительный изгибающий момент Мда,
Н м
|
1446,9
|
25838,2
|
1058199,9
|
165722,5
|
277911,2
|
418240,9
|
| Дополнительный изгибающий момент Мдб,
Н м
|
-883,2
|
-10808,3
|
-712259,4
|
-44301,8
|
-65681,8
|
-90133,9
|
| Дополнительное усилие подъема Рдоп,
Н
|
25,2
|
1386,8
|
5925,3
|
13615,4
|
24457,3
|
38450,9
|
| Суммарное усилие вывешивания Рсум,
Н
|
135580
|
170542,3
|
217081,6
|
266772,7
|
319615,5
|
375609,9
|
Вывод: из расчетов, приведенных в таблице 2, видно, что при базе платформы 17260 мм, подъемно-рихтовочное устройство сможет произвести вывешивание решетки на величину меньше 150 мм при максимальном усилии на штоках гидроцилиндров вывешивания – 250 кН.
2.2.1.3 Расчетный случай №3
Исходные данные: длина защемленного рельса в пролете стенда L: 12,72 м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой передней тележки ар
: 9,05 м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой задней тележки bp
: 3,67 м; величины вывешивания путевой решетки Hвыв
, м: 0,01; 0,05; 0,1; 0,15; 0,2, 0,25.
Расчетная схема изображена на рисунке 13. Расчет усилий вывешивания рельсошпальной решетки Рсум
произведен по формулам (1) – (11) и сведен в таблицу 3.

Рисунок 13 – Расчетная схема №3 к определению усилия вывешивания РШР
Таблица 3 – Усилия вывешивания РШР при величине L=12,72 м
| Величина вывешивания решетки Hвыв
, м
|
0,01
|
0,05
|
0,1
|
0,15
|
0,2
|
0,25
|
| Погонное сопротивление подъему q, Н/м
|
15998
|
15990,2
|
15980,4
|
15970,6
|
15960,8
|
15951
|
| Основное усилие подъема решетки Р, Н
|
148548
|
247019,8
|
370109,5
|
493199,2
|
616288,9
|
739378,6
|
| Реактивное усилие R1
,
Н
|
-73520,2
|
-60547,1
|
-44330,8
|
-28114,5
|
-11898,2
|
4318,1
|
| Реактивное усилие R2 ,
Н
|
18573,1
|
104171,6
|
211169,6
|
318167,6
|
425165,7
|
532163,8
|
| Граничный реактивный момент M1 ,
Н м
|
-109026,4
|
-55666,3
|
11033,8
|
77733,9
|
144433,9
|
211134,1
|
| Угол поворота рельсов в,
рад
|
0,003
|
0
|
-0,004
|
-0,008
|
-0,012
|
-0,016
|
| Продольное усилие растяжения Рпр,
Н
|
7848
|
86328
|
184428
|
282528
|
380628
|
478728
|
| Дополнительный изгибающий момент Мда,
Н м
|
-231,8
|
4298,7
|
25168,2
|
63042,3
|
117920,7
|
189802,8
|
| Дополнительный изгибающий момент Мдб,
Н м
|
172,5
|
4323,6
|
15715,5
|
33999,8
|
59176,6
|
91246,3
|
| Дополнительное усилие подъема Рдоп,
Н
|
25,661
|
1983,7
|
8475,8
|
19476,3
|
34985,2
|
55002,5
|
| Суммарное усилие вывешивания Рсум,
Н
|
148573,7
|
249003,5
|
378585,3
|
512675,5
|
651274,1
|
794381,1
|
Вывод: из расчетов, приведенных в таблице 3, видно, что при базе платформы 14570 мм, подъемно-рихтовочное устройство сможет произвести вывешивание решетки на величину около 50 мм при максимальном усилии на штоках гидроцилиндров вывешивания – 250 кН.
2.2.2 Расчет усилий сдвига
2.2.2.1 Расчетный случай №1
Исходные данные: длина защемленного рельса в пролете стенда L: 18,1 м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой передней тележки ар
: 9,05 м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой задней тележки bp
: 9,05 м; величины сдвига путевой решетки Sсдв
, м: 0,01; 0,03; 0,06; 0,09; 0,12; 0,15.
Расчетная схема изображена на рисунке 14.
Рисунок 14 – Расчетная схема №1 к определению усилия сдвига РШР
Суммарное расчетное усилие сдвига путевой решетки Qсум
, Н [10]:
 , (12) , (12)
где Q - расчетное усилие на сдвиг путевой решетки, Н [10]; Qдоп
- дополнительное усилие сдвига путевой решетки в плане  , Н [10]. , Н [10].
 , (13) , (13)
где  - опытный коэффициент учитывающий повышение поперечной жесткости путевой решетки, обусловленное скреплениями рельсов со шпалами, для железобетонных шпал и рельсов Р65, - опытный коэффициент учитывающий повышение поперечной жесткости путевой решетки, обусловленное скреплениями рельсов со шпалами, для железобетонных шпал и рельсов Р65,  [10]; Е - модуль упругости рельсовой стали, [10]; Е - модуль упругости рельсовой стали,  [10]; [10];  - момент инерции поперечного сечения двух рельсов относительно вертикальной оси, - момент инерции поперечного сечения двух рельсов относительно вертикальной оси,
 м4
[10]. м4
[10].

 , (14) , (14)
где кд
- поправочный коэффициент,  [10]; [10];  ,- дополнительные изгибающие моменты, ,- дополнительные изгибающие моменты,  . .
 , (15) , (15)
 , (16) , (16)
где  - дополнительное продольное усилие растяжения, Н [10]; - дополнительное продольное усилие растяжения, Н [10];  - угол поворота поперечного сечения рельса в горизонтальной плоскости, рад [10]. - угол поворота поперечного сечения рельса в горизонтальной плоскости, рад [10].
 , (17) , (17)
где F - площадь поперечного сечения одного рельса Р65,  м2
[10]. м2
[10].
 . .
 , (18) , (18)
где  - граничный реактивный момент, - граничный реактивный момент,  [10]; [10];  - граничное реактивное усилие, Н [10]. - граничное реактивное усилие, Н [10].
 , (19) , (19)
 , (20) , (20)
 . .
 . .
 . .
 . .
 . .
 . .
 Н. Н.
Расчет усилий сдвига путевой решетки по формулам (12) – (20) при других величинах Sсдв
сведен в таблицу 4.
Таблица 4 – Усилия сдвига РШР при величине L=18,1 м
| Величина сдвига решетки Sсдв
, м
|
0,03
|
0,06
|
0,09
|
0,12
|
0,15
|
| Расчетное усилие сдвига Q, H
|
8880,9
|
17761,9
|
26642,9
|
35523,9
|
44404,9
|
| Продольное усилие растяжения Рпр
, Н
|
20567,7
|
82270,7
|
185109
|
329082,8
|
514191,9
|
| Граничное реактивное усилие R1 ,
Н
|
4440,5
|
8880,9
|
13321,5
|
17761,9
|
22202,5
|
| Граничный реактивный момент M1 ,
Н м
|
20093,2
|
40186,4
|
6027964,568
|
80372,8
|
100466,1
|
| Угол поворота рельсов г
, рад
|
0
|
0
|
0
|
0
|
0
|
| Дополнительный изгибающий момент Мда,
Н м
|
617
|
4936,2
|
16659,8
|
39489,9
|
77128,8
|
| Дополнительный изгибающий момент Мдб,
Н м
|
617
|
4936,2
|
16659,8
|
39489,9
|
77128,8
|
| Дополнительное усилие сдвига Qдоп,
Н
|
163,6
|
1309,1
|
4418,1
|
10472,5
|
20454,1
|
| Суммарное усилие сдвига Qсум,
Н
|
9044,6
|
19071
|
31061
|
45996,4
|
64858,9
|
Вывод: из расчетов, приведенных в таблице 4, видно, что при базе платформы 19950 мм, подъемно-рихтовочное устройство сможет произвести сдвиг решетки на величину 150 мм при максимальном усилии на штоках гидроцилиндров вывешивания – 170 кН.
2.2.2.2 Расчетный случай №2
Исходные данные: длина защемленного рельса в пролете стенда L: 15,41 м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой передней тележки ПРУ ар
: 9,05 м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой задней тележки bp
: 6,36 м; величины сдвига путевой решетки Sсдв
, м: 0,01; 0,03; 0,06; 0,09; 0,12; 0,15.
Рисунок 15 – Расчетная схема №2 к определению усилия сдвига РШР
Расчетная схема изображена на рисунке 15. Расчет усилий сдвига рельсошпальной решетки по формулам (11) – (19) при других величинах Sсдв
и сведен в таблицу 5.
Таблица 5 – Усилия сдвига РШР при величине L=15,41 м
| Величина сдвига решетки Sсдв
, м
|
0,01
|
0,03
|
0,06
|
0,09
|
0,12
|
0,15
|
| Расчетное усилие сдвига Q, H
|
5263,6
|
15790,9
|
31581,8
|
47372,8
|
63163,7
|
78954,6
|
| Продольное усилие растяжения Рпр
, Н
|
3152,7
|
28375,1
|
113500,3
|
255375,8
|
454001,4
|
709377,1
|
| Граничное реактивное усилие R1 ,
Н
|
1949,7
|
5849,1
|
9008,4
|
17547,3
|
1949,7
|
1949,7
|
| Граничный реактивный момент M1 ,
Н м
|
8114,2
|
24342,5
|
40570,8
|
73027,5
|
32672,5
|
39370,3
|
| Угол поворота рельсов г
, рад
|
-0,003
|
-0,008
|
-0,001
|
-0,025
|
0,092
|
0,118
|
| Дополнительный изгибающиймомент Мда,
Н м
|
109,5
|
2957,5
|
4167,1
|
79846,8
|
-323285,4
|
-648927,5
|
| Дополнительный изгибающий момент Мдб,
Н м
|
-23,29
|
-628,9
|
6274,4
|
-16977,3
|
319959,6
|
637227
|
| Дополнительное усилие сдвига Qдоп,
Н
|
10,1
|
273,5
|
1736,4
|
7384,1
|
17503,2
|
34185,9
|
| Суммарное усилие сдвига Qсум,
Н
|
5273,8
|
16064,4
|
33318,2
|
54756,9
|
80666,9
|
113140,5
|
Вывод: из расчетов, приведенных в таблице 3, видно, что при базе платформы 17260 мм, подъемно-рихтовочное устройство сможет произвести вывешивание решетки на величину 150 мм при максимальном усилии на штоках гидроцилиндров вывешивания – 170 кН.
2.2.2.3 Расчетный случай №3
Исходные данные: длина защемленного рельса в пролете стенда L: 12,72 м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой передней тележки ПРУ ар
: 9,05 м; расстояние от оси ПРУ до ближайшей точки защемления рельса колесной парой задней тележки bp
: 3,67 м; величины сдвига путевой решетки Sсдв
, м: 0,01; 0,03; 0,06; 0,09; 0,12; 0,15.

Рисунок 16 – Расчетная схема №4 к определению усилия сдвига РШР
Расчет усилий сдвига путевой решетки по формулам (11) – (19) при других величинах Sсдв
сведен в таблицу 6.
Таблица 6 – Усилия сдвига РШР при величине L=12,72 м
| Величина сдвига решетки Sсдв
, м
|
0,01
|
0,03
|
0,06
|
0,09
|
0,12
|
0,15
|
| Расчетное усилие сдвига Q, H
|
15406,8
|
46220,4
|
92440,9
|
138661,3
|
184881,7
|
231102,1
|
| Продольное усилие растяжения Рпр
, Н
|
4627,3
|
41645,5
|
166582,1
|
374809,6
|
666328,2
|
1041137,9
|
| Граничное реактивное усилие R1 ,
Н
|
3107,5
|
9322,6
|
18645,2
|
27967,8
|
37290,4
|
46613
|
| Граничный реактивный момент M1 ,
Н м
|
11606,9
|
34820,9
|
69641,8
|
104462,8
|
139283,8
|
174104,7
|
| Угол поворота рельсов г
, рад
|
-0,009
|
-0,028
|
-0,057
|
-0,085
|
-0,114
|
-0,142
|
| Дополнительный изгибающиймомент Мда,
Н м
|
443,1
|
11962,2
|
95662,7
|
322666,9
|
764194,3
|
1490946
|
| Дополнительный изгибающий момент Мдб,
Н м
|
-114,6
|
-3094,9
|
-24745,5
|
-83437,1
|
-197514,8
|
-385113,9
|
| Дополнительное усилие сдвига Qдоп,
Н
|
21,3
|
574,2
|
4593,4
|
15502,7
|
36747,1
|
71771,7
|
| Суммарное усилие сдвига Qсум,
Н
|
15428,1
|
46794,6
|
97034,3
|
154163,9
|
221628,8
|
302873,9
|
Вывод: из расчетов, приведенных в таблице 6, видно, что при базе платформы 14570 мм, подъемно-рихтовочное устройство сможет произвести сдвиг решетки на величину между 90 и 120 мм при максимальном усилии на штоках гидроцилиндров вывешивания – 170 кН.
2.3 Конструирование элементов стенда
2.3.1 Прочностной расчет боковых и хребтовых балок рамы стенда
Исходные данные: материал: сталь 09Г2; тип сечения: двутавр №60; усилие вывешивания решетки Рвыв
: 150 кН; усилие сдвига Qсдв
: 170 кН.
Цель расчета: проверка несущей способности боковых и хребтовых балок.
Рисунок 17 – Расчетная схема для базы стенда 19950 мм
Рисунок 18 – Расчетная схема для базы стенда 17260 мм
Рисунок 19 – Расчетная схема для базы стенда 14570 мм

h – высота сечения, м; h1
– расстояние между полками, м; b – ширина сечения, м; tст
– толщина стенки, м; tп
– толщина полки, м; 1, 2, 3 – рассматриваемые в расчете точки
Рисунок 20 – Сечение рамы
Металлоконструкция стенда была спроектирована и рассчитана в программе APM WinMachine. Результаты расчетов приведены в Приложениях А и Б.
На металлоконструкцию действуют реакции от усилий вывешивания и сдвига рельсошпальной решетки, а также вес конструкции.
Вес металлоконструкции стенда Gп
, Н:
 , (21) , (21)
где mмк
– масса металлоконструкции, mмк
= 10600 кг; g – ускорение свободного падения, g = 9,8 м/с2
.
 Н. Н.
Расчет на прочность металлоконструкции стенда произведен по методу допускаемых напряжений.
Из Приложений А и Б были выбраны наиболее нагруженные стержни, их расчет приведен ниже. Расчетные схемы приведены на рисунках 17 – 19.
2.3.1.1 Проверка прочности сечения стержня
Rod
57
Таблица 7 – Исходные данные для стержня Rod57
| Продольное усилие
N, Н
|
Поперечное усилие
Qу
, Н
|
Поперечное усилие
Qx
, Н
|
Момент кручения
Т, Н м
|
Изгибающий момент
Му
, Н м
|
Изгибающий момент
Мх
, Н м
|
| -105192,73
|
-9142,98
|
-24310,09
|
-951,838
|
16813,796
|
99509,169
|
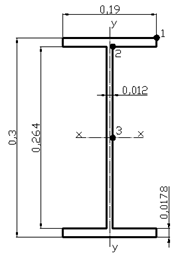
Рисунок 21 – Геометрические характеристики сечения стержня Rod57
Условие прочности [5]:
 , (22) , (22)
где  - эквивалентные напряжения, МПа [5]; - эквивалентные напряжения, МПа [5];  - допускаемые напряжения, МПа [5]. - допускаемые напряжения, МПа [5].
 , (23) , (23)
где  - суммарные нормальные напряжения, МПа [5]; - суммарные нормальные напряжения, МПа [5];  - суммарные касательные напряжения, МПа [5]. - суммарные касательные напряжения, МПа [5].
 , (24) , (24)
где  - предел текучести стали, - предел текучести стали,  =305 МПа [3]; n0
– коэффициент запаса прочности стали, n0
=1,4 [3]. =305 МПа [3]; n0
– коэффициент запаса прочности стали, n0
=1,4 [3].
 МПа. МПа.
 , (25) , (25)
где А - площадь сечения, м2
[5] ; Iх
- момент инерции относительно главной центральной оси х-х, м [5]; у – расстояние от главной центральной оси х-х до рассматриваемой точки, м [5]; Iу
- момент инерции относительно главной центральной оси у-у, м4
[5] ; х – расстояние от главной центральной оси у-у до рассматриваемой точки, м [5].
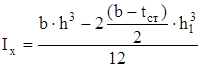
 , (26) , (26)
где b – ширина сечения, b=0,19 м [5]; tп
– толщина полки, tп
= 0,0178 м [5]; h1
– расстояние между полками, h1
=0,264 м [5]; tст
– толщина стенки, tc
т
=0,012 м [5].
 м2
. м2
.
 , (27) , (27)
где h – высота сечения, h=0,3 м.
 м4
. м4
.
 , (28) , (28)
 м4
. м4
.
 , (29) , (29)
где  - касательные напряжения от действия поперечной силы Qy
, МПа [5]; - касательные напряжения от действия поперечной силы Qy
, МПа [5];
 - касательные напряжения от действия поперечной силы Qх
, МПа [5]; - касательные напряжения от действия поперечной силы Qх
, МПа [5];  - касательные напряжения от действия момента кручения Мкр
, МПа [5]. - касательные напряжения от действия момента кручения Мкр
, МПа [5].
 , (30) , (30)
где  - статический момент отсеченной части, м3
[5]; bx
– ширина рассеченной части, м [5]. - статический момент отсеченной части, м3
[5]; bx
– ширина рассеченной части, м [5].
 , (31) , (31)
где Аотс
– площадь отсеченной части сечения для рассматриваемой точки, м2
[5]; ус
– расстояние от оси х-х до центра тяжести отсеченной части, м [5];.
Схемы для определения статического момента приведены на рисунках 21 и 22.

Рисунок 22 - Схема к определению статического момента для точки 2
Рисунок 23 - Схема к определению статического момента для точки 3
 , (32) , (32)
где h – высота рассматриваемого сечения, м [5]; у – расстояние от главной центральной оси х-х до рассматриваемой точки, м [5].
Касательные напряжения  , так как величина действующего момента кручения Мкр
в рассматриваемых стержнях имеет весьма малое значение. , так как величина действующего момента кручения Мкр
в рассматриваемых стержнях имеет весьма малое значение.
2.3.1.2 Расчет эквивалентных напряжения для точки 1
Суммарные нормальные напряжения по формуле (25) при y=0,15 м, x = 0,095 м:
 МПа. МПа.
Статический момент по формуле (31) Sотс
=0 при Аотс
= 0.
Касательные напряжения по формуле (32) при tст
=0,012 м, h=0,3 м, y=0,15 м:
 МПа. МПа.
Суммарные касательные напряжения по формуле (29)  МПа. МПа.
Эквивалентные напряжения по формуле (23):
 МПа. МПа.
2.3.1.3 Расчет эквивалентных напряжения для точки 2
Суммарные нормальные напряжения по формуле (25) при y=0,132 м, х=0,006 м:
 МПа. МПа.
Площадь отсеченной части:
 м2
. м2
.
Статический момент по формуле (31) при ус
=0,1411м:
 м3
. м3
.
Касательные напряжения по формуле (30) при  м, м,
 МПа. МПа.
Касательные напряжения по формуле (32) при tст
=0,012 м, h=0,3 м, y=0,15 м:
 МПа. МПа.
Суммарные касательные напряжения по формуле (29):
 МПа. МПа.
Эквивалентные напряжения по формуле (23):
 МПа. МПа.
2.3.1.4 Расчет эквивалентных напряжения для точки 3
Суммарные нормальные напряжения по формуле (25) при y=0 м, х=0,006 м:
 МПа. МПа.
Площади отсеченных частей:
 м2
; м2
;  м2
. м2
.
Статический момент по формуле (31) при ус 1
=0,1411 м; ус 2
=0,066 м:
 м3
. м3
.
Касательные напряжения по формуле (32) при  м: м:
 МПа. МПа.
Касательные напряжения по формуле (33) при tст
=0,012 м, h=0,3 м, y=0:
 МПа. МПа.
Суммарные касательные напряжения по формуле (29):
 МПа. МПа.
Эквивалентные напряжения по формуле (23):
 МПа. МПа.
В результате расчетов, выяснилось, что самая нагруженная точка 1.
Проверка выполнения условия прочности (22):
 . .
Условие прочности соблюдается.
2.3.1.5 Расчет эквивалентных сечений
Опасные сечения, сходные по геометрическим параметрам с сечением стержня Rod57 рассчитаны по формулам (22) – (32).
Расчетные схемы для соответствующих значений базы платформы изображены на рисунках (17) – (19). Максимальные усилия в стержнях взяты из Приложения А и приведены в таблице 8. Результат расчетов сведен в таблицу 9.
Таблица 8 – Максимальные нагрузки в стержнях
| База платформы, мм
|
№стержня
|
Продольная силаN, Н
|
Поперечная силаQy
, Н
|
Поперечная силаQх
, Н
|
Момент кручения Т, Н
|
Изгибающий моментМу
, Н м
|
Изгибающий моментМх
, Н м
|
| 19950
|
Rod 255
|
-165042,34
|
145698,02
|
43840,19
|
-170,081
|
15908,952
|
104908,623
|
| Rod 256
|
165601,65
|
-122180,82
|
42870,2
|
-54,389
|
15790,903
|
17669,732
|
| Rod 60
|
106781,8
|
3998,43
|
-21633,22
|
-350,903
|
16476,509
|
-2350,193
|
| Rod 7
|
-20948,75
|
10451,56
|
9440,72
|
-117,110
|
13000,354
|
-36412,762
|
| Rod 19
|
4337,22
|
35802,81
|
10555,23
|
-116,439
|
14248,421
|
-87636,728
|
| Rod 42
|
-4077,96
|
16541,56
|
10554,4
|
-115,248
|
14247,396
|
-60584,774
|
| Rod 31
|
20865,7
|
-11253,67
|
9424,35
|
-106,613
|
12373,128
|
-29522,795
|
| 17260
|
Rod 8
|
-27803,68
|
23481,7
|
12457,97
|
-104,609
|
-16968,97
|
-59521,467
|
| Rod 20
|
9653,56
|
34670,43
|
13612,46
|
-113,933
|
18418,393
|
-81600,983
|
| Rod 43
|
-9180,53
|
15523,11
|
13611,44
|
-115,655
|
18417,137
|
-55092,658
|
| Rod 32
|
27594,71
|
-5211,29
|
12439,18
|
-114,529
|
16516,358
|
-20730,946
|
| 14570
|
Rod 153
|
-32552,78
|
39017,92
|
14042,31
|
-107,930
|
16850,350
|
-68720,585
|
| Rod 151
|
26433,39
|
35250,03
|
22106,31
|
-122,770
|
21796,373
|
-76632,068
|
| Rod 149
|
-25997,98
|
25128,07
|
22096,52
|
-121,130
|
21790,087
|
-55007,484
|
| Rod 147
|
32351,75
|
-1518,03
|
14030,34
|
-113,574
|
9085,604
|
-10073,357
|
Таблица 9 – Результаты расчетов
| № стержня
|
Рассматриваемая точка сечения
|
Суммарные нормальные напряжения
|
Касательные напряжения
|
Касательные напряжения
|
Суммарные касательные напряжения
|
Эквивалентные напряжения
|
| Rod 255
|
1
|
191,7
|
0
|
1,91
|
1,91
|
191,8
|
| 2
|
110,8
|
37,5
|
2,14
|
39,6
|
39,6
|
| 3
|
21,2
|
45,7
|
3,83
|
49,5
|
88,4
|
| Условие прочности выполняется: 191,7 МПа < 217,9 МПа
|
| Rod 256
|
1
|
106,6
|
0
|
1,87
|
1,87
|
106,7
|
| 2
|
36,4
|
31,4
|
2,09
|
33,5
|
68,5
|
| 3
|
21,3
|
38,3
|
3,74
|
42,1
|
75,9
|
| Условие прочности выполняется: 106,6 МПа < 217,9 МПа
|
| Rod 60
|
1
|
88,9
|
0
|
0,944
|
0,944
|
88,9
|
| 2
|
17,6
|
0,771
|
1,056
|
1,83
|
17,8
|
| 3
|
15,6
|
0,94
|
1,89
|
2,83
|
16,3
|
| Условие прочности выполняется: 88,9 МПа < 217,9 МПа
|
| Rod 7
|
1
|
94,5
|
0
|
0,412
|
0,412
|
94,6
|
| 2
|
36,8
|
2,69
|
0,461
|
3,15
|
37,2
|
| 3
|
5,72
|
3,28
|
0,824
|
4,1
|
9,11
|
| Условие прочности выполняется: 94,5 МПа < 217,9 МПа
|
| Rod 19
|
1
|
151,2
|
0
|
0,488
|
0,488
|
151,2
|
| 2
|
79,4
|
9,2
|
0,515
|
9,73
|
81,2
|
| 3
|
4,84
|
10,3
|
0,975
|
11,3
|
20,1
|
| Условие прочности выполняется: 151,2 МПа < 217,9 МПа
|
| Rod 42
|
1
|
124,9
|
0
|
0,461
|
0,461
|
124,9
|
| 2
|
56,3
|
4,3
|
0,515
|
4,77
|
56,9
|
| 3
|
4,85
|
6,27
|
0,975
|
7,24
|
13,5
|
| Условие прочности выполняется: 124,9 МПа < 217,9 МПа
|
| Rod 31
|
1
|
87,7
|
0
|
0,436
|
0,436
|
87,7
|
| 2
|
28,1
|
1,94
|
0,488
|
2,42
|
28,4
|
| 3
|
6,04
|
2,36
|
0,872
|
3,23
|
8,24
|
| Условие прочности выполняется: 87,7 МПа < 217,9 МПа
|
| Rod8
|
1
|
137,9
|
0
|
0,61
|
0,61
|
137,9
|
| 2
|
50,6
|
4,61
|
0,678
|
5,29
|
51,4
|
| 3
|
8,61
|
5,62
|
1,21
|
6,83
|
14,6
|
| Условие прочности выполняется: 137,9 МПа < 217,9 МПа
|
| Rod20
|
1
|
167,9
|
0,664
|
0,664
|
0,664
|
167,9
|
| 2
|
70,5
|
8,01
|
0,743
|
8,75
|
72,1
|
| 3
|
6,99
|
9,76
|
1,33
|
11,1
|
20,4
|
| Условие прочности выполняется: 167,9 МПа < 217,9 МПа
|
| Rod43
|
1
|
150,8
|
0
|
0,664
|
0,664
|
150,8
|
| 2
|
55,4
|
4,72
|
0,743
|
5,47
|
56,2
|
| 3
|
6,99
|
5,76
|
1,33
|
7,09
|
14,1
|
| Условие прочности выполняется: 150,8 МПа < 217,9 МПа
|
| Rod32
|
1
|
104,9
|
0
|
0,61
|
0,61
|
104,9
|
| 2
|
23,4
|
0,343
|
0,677
|
1,02
|
23,5
|
| 3
|
8,46
|
0,418
|
1,21
|
1,63
|
8,91
|
| Условие прочности выполняется: 104,9 МПа < 217,9 МПа
|
| Rod153
|
1
|
160,7
|
0
|
0,869
|
0,869
|
160,7
|
| 2
|
63,3
|
8,9
|
0,972
|
9,87
|
65,6
|
| 3
|
10
|
10,9
|
1,74
|
12,6
|
23,9
|
| Условие прочности выполняется: 160,7 МПа < 217,9 МПа
|
| Rod151
|
1
|
189,6
|
0
|
1,073
|
1,073
|
189,6
|
| 2
|
77,2
|
9,68
|
1,2
|
10,9
|
79,5
|
| 3
|
10,9
|
11,8
|
2,15
|
13,9
|
26,5
|
| Условие прочности выполняется: 189,6 МПа < 217,9 МПа
|
| Rod149
|
1
|
175,4
|
0
|
1,07
|
1,07
|
175,4
|
| 2
|
64,7
|
7,32
|
1,2
|
8,52
|
66,4
|
| 3
|
10,9
|
8,92
|
2,15
|
11,7
|
22,1
|
| Условие прочности выполняется: 121,2 МПа < 217,9 МПа
|
| Rod147
|
1
|
121,2
|
0
|
0,869
|
0,869
|
121,2
|
| 2
|
28,6
|
1,95
|
0,972
|
2,92
|
29
|
| 3
|
9,99
|
2,38
|
1,74
|
4,11
|
12,3
|
Вывод: расчеты показывают, что прочность боковых и хребтовых балок рамы в рассматриваемых сечениях достаточна.
2.3.1.6 Проверка прочности сечения стержня
Rod
211
Таблица 10 – Максимальные усилия в стержне Rod211
| Продольное усилие
N, Н
|
Поперечное усилие
Qу
, Н
|
Поперечное усилие
Qx
, Н
|
Момент кручения
Т, Н м
|
Изгибающий момент
Му
, Н м
|
Изгибающий момент
Мх
, Н м
|
| 145325,8
|
-74261,9
|
-27000,75
|
31,4
|
15506,135
|
303142,386
|

Рисунок 24 – Геометрические характеристики сечения стержня Rod211

Рисунок 25 – Схема к определению статического момента для точки 2

Рисунок 26 – Схема к определению статического момента для точки 3
Площадь сечения по формуле (26):
 м2
. м2
.
Момент инерции относительно главной центральной оси х-х по формуле (27):
 м4
. м4
.
Момент инерции относительно главной центральной оси у-у по формуле (28):
 м4
. м4
.
2.3.1.7 Расчет эквивалентных напряжения для точки 1
Суммарные нормальные напряжения по формуле (25) при y=0,3 м, x=0,095 м:
 МПа. МПа.
Статический момент по формуле (31) Sотс
=0 при Аотс
= 0.
Касательные напряжения по формуле (32) при tст
=0,012 м, h=0,6 м, y=0,3 м:
 МПа. МПа.
Суммарные касательные напряжения по формуле (29)  МПа. МПа.
Эквивалентные напряжения по формуле (23):
 МПа. МПа.
2.3.1.8 Расчет эквивалентных напряжения для точки 2
Суммарные нормальные напряжения по формуле (25) при y=0,282 м, х = 0,006 м:
 МПа. МПа.
Площадь отсеченной части:
 м2
. м2
.
Статический момент по формуле (31) при ус
=0,291м:
 м3
. м3
.
Касательные напряжения по формуле (30) при  м: м:
 МПа. МПа.
Касательные напряжения по формуле (32) при tст
=0,012 м, h=0,6 м, y=0,282 м:
 МПа. МПа.
Суммарные касательные напряжения по формуле (29):
 МПа. МПа.
Эквивалентные напряжения по формуле (23):
 МПа. МПа.
2.3.1.9 Расчет эквивалентных напряжения для точки 3
Суммарные нормальные напряжения по формуле (25) при y=0 м, х=0,006 м:
 МПа. МПа.
Площади отсеченных частей:
 м2
; м2
;  м2
. м2
.
Статический момент по формуле (31) при ус 1
=0,291 м; ус 2
=0,141 м:
 м3
. м3
.
Касательные напряжения по формуле (30) при м:
 МПа. МПа.
Касательные напряжения по формуле (32) при tст
=0,012 м, h=0,6 м, y=0:
 МПа. МПа.
Суммарные касательные напряжения по формуле (29):
 МПа. МПа.
Эквивалентные напряжения по формуле (23):
 МПа. МПа.
В результате расчетов, выяснилось, что самая нагруженная точка 1.
Проверка выполнения условия прочности (22):
 . .
Условие прочности соблюдается, т.к. в металлоконструкции машин допускается превышение допускаемых напряжений на 5%. В данном случае превышение напряжений составляет 2,6 МПа, что составляет 1,19%.
2.3.1.10 Проверка прочности эквивалентных сечений
Максимальные усилия в рассматриваемых стержнях взяты из Приложения А и сведены в таблице 11
Таблица 11 – Максимальные усилия в стержнях
| База платформы, мм
|
№
стержня
|
Продольная сила
N, Н
|
Поперечная сила
Qy
, Н
|
Поперечная сила
Qх
, Н
|
Момент кручения Т, Н
|
Изгибающий момент
Му
, Н м
|
Изгибающий момент
Мх
, Н м
|
| 19950
|
Rod 209
|
262671,56
|
-43378,06
|
-38010,15
|
31,687
|
25246,176
|
-235392,396
|
| Rod 207
|
-263328,77
|
-33375,21
|
-38011,61
|
32,330
|
25247,478
|
-152626,651
|
| Rod 205
|
-144492,37
|
-5294,56
|
-27002,8
|
34,074
|
12844,988
|
-34289,368
|
Опасные сечения, сходные по геометрическим параметрам с сечением стержня Rod211 рассчитаны по формулам (21) – (31). Максимальные усилия в стержнях приведены в таблице 11. Результат расчетов сведен в таблицу 12.
Таблица 12 – Результат расчетов
| № стержня
|
Рассматриваемая точка сечения
|
Суммарные нормальные напряжения
|
Касательные напряжения
|
Касательные напряжения
|
Суммарные касательные напряжения
|
Эквивалентные напряжения
|
| Rod 209
|
1
|
210,6
|
0
|
3,31
|
3,31
|
210,6
|
| 2
|
97,3
|
4,69
|
3,51
|
8,19
|
98,3
|
| 3
|
26,7
|
6,96
|
6,62
|
13,6
|
35,6
|
| Условие прочности выполняется: 210,6 МПа < 217,9 МПа
|
| Rod 207
|
1
|
195,9
|
0
|
3,31
|
3,31
|
195,9
|
| 2
|
83,5
|
3,61
|
3,51
|
7,12
|
84,4
|
| 3
|
26,8
|
5,36
|
6,62
|
11,9
|
33,9
|
| Условие прочности выполняется: 195,9 МПа < 217,9 МПа
|
| Rod 205
|
1
|
93,4
|
0
|
2,34
|
2,34
|
93,4
|
| 2
|
25,9
|
0,572
|
2,49
|
3,064
|
26,4
|
| 3
|
13,5
|
0,849
|
4,71
|
5,56
|
17,9
|
| Условие прочности выполняется: 93,4 МПа < 217,9 МПа
|
Вывод: расчеты показывают что прочность боковых и хребтовых балок рамы в рассматриваемых сечениях достаточна.
2.3.2 Прочностной расчет поперечных балок рамы стенда
Исходные данные: материал: сталь 09Г2; тип сечения: квадратная труба 150 х 8; усилие вывешивания решетки Рвыв
: 150 кН; усилие сдвига Qсдв
: 170 кН.

h – высота сечения, м; t – толщина стенки, м; 1, 2 – рассматриваемые в расчете точки.
Рисунок 27 – Сечение поперечной балки
2.3.2.1 Проверка прочности сечения стержня
Rod
177
Таблица 13 – Исходные данные для стержня Rod177
| Продольное усилие
N, Н
|
Поперечное усилие
Qу
, Н
|
Поперечное усилие
Qx
, Н
|
Момент кручения
Т, Н м
|
Изгибающий момент
Му
, Н м
|
Изгибающий момент
Мх
, Н м
|
| 826,28
|
-112090,98
|
-103401,97
|
2496,069
|
19179,242
|
24469,752
|
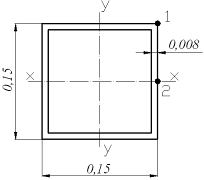
Рисунок 28 – Геометрические характеристики сечения
Площадь сечения А, м2
:
 , (33) , (33)
где h – высота сечения, h=0,15 м; t – толщина стенки, t=0,008 м.
 м2
. м2
.
Моменты инерции относительно главных центральных осей Iх
и Iу
м4
:
 , (34) , (34)
 м4
. м4
.
2.3.2.2 Расчет эквивалентных напряжения для точки 1
Суммарные нормальные напряжения по формуле (25) при y=0,075 м, x = 0,075 м:
 МПа. МПа.
Касательные напряжения  , МПа: , МПа:
 , (35) , (35)
где b – расстояние между стенками, b=0,142 м; y – расстояние от горизонтальной оси х-х до рассматриваемой точки, y=0,075 м.
 МПа. МПа.
Касательные напряжения  рассчитаны по формуле (30) при bx
=2t=0,016 м: рассчитаны по формуле (30) при bx
=2t=0,016 м:
 . .
Касательные напряжения  , МПа: , МПа:
 , (36) , (36)
 МПа. МПа.
Суммарные касательные напряжения по формуле (29):
 МПа. МПа.
Эквивалентные напряжения по формуле (23):
 МПа. МПа.
2.3.2.3 Расчет эквивалентных напряжения для точки 2
Суммарные нормальные напряжения по формуле (25) при y=0 м, х=0,075 м:
 МПа. МПа.

Рисунок 29 – Схема к определению статического момента
Площади отсеченных частей:
 м2
. м2
.
 м2
. м2
.
Статический момент по формуле (31) при ус1
=0,071м, ус2
=0,034м:
 м3
. м3
.
 м3
. м3
.
 м3
. м3
.
Касательные напряжения по формуле (30) при  м: м:
 МПа. МПа.
Касательные напряжения по формуле (35) при b=0,142 м, y=0:
 . .
Касательные напряжения по формуле (36):
 МПа. МПа.
Суммарные касательные напряжения по формуле (29):
 МПа. МПа.
Эквивалентные напряжения по формуле (23):
 МПа. МПа.
В результате расчетов, выяснилось, что самая нагруженная точка 1.
Проверка выполнения условия прочности (22):
226,4 МПа > 217,9 МПа.
Условие прочности соблюдается, т.к. в металлоконструкции машин допускается превышение допускаемых напряжений на 5%. В данном случае напряжения превышают на 8,5 МПа, что составляет 3,9%.
2.3.2.4 Проверка прочности эквивалентных сечений
Таблица 14 – Максимальные нагрузки в стержнях
| №
стержня
|
Продольная сила
N, Н
|
Поперечная сила
Qy
, Н
|
Поперечная сила
Qх
, Н
|
Момент кручения Т, Н
|
Изгибающий момент
Му
, Н м
|
Изгибающий момент
Мх
, Н м
|
| Rod 176
|
35713,19
|
-22335,33
|
-12042,44
|
-221,439
|
6840,504
|
24568,793
|
| Rod 175
|
-32973,87
|
15231,19
|
-12112,64
|
587,806
|
6822,876
|
-16998,083
|
| Rod 139
|
3547,89
|
-12559,52
|
23660,26
|
-998344,29
|
13197,838
|
14201,142
|
| Rod 140
|
238,56
|
-57257,1
|
82663,57
|
-5509,96
|
15318,196
|
14154,841
|
| Rod 138
|
-2757,7
|
6184,6
|
23786,9
|
-1668,535
|
13240,038
|
-7039,849
|
Опасные сечения, сходные по геометрическим параметрам с сечением стержня Rod177 рассчитаны по формулам (22) – (32). Максимальные усилия в стержнях взяты из приложения А и приведены в таблице 14. Результат расчетов сведен в таблицу 15.
Таблица 15 – Результаты расчетов
| № стержня
|
Рассматриваемая точка сечения
|
Суммарные нормальные напряжения
|
Касательные напряжения
|
Касательные напряжения
|
Касательные напряжения
|
Суммарные касательные напряжения
|
Эквивалентные напряжения
|
| Rod 176
|
1
|
161,6
|
4,19
|
0
|
0,617
|
4,802
|
161,9
|
| 2
|
41,4
|
0
|
11,1
|
0,617
|
11,7
|
46,01
|
| Условие прочности выполняется: 161,6 МПа < 217,9 МПа
|
| Rod 175
|
1
|
123,9
|
4,21
|
0
|
1,64
|
5,85
|
124,3
|
| 2
|
40,7
|
0
|
7,56
|
1,64
|
9,19
|
43,7
|
| Условие прочности выполняется: 123,9 МПа < 217,9 МПа
|
| Rod 139
|
1
|
134,9
|
8,22
|
0
|
2,78
|
11,01
|
136,3
|
| 2
|
65,4
|
0
|
6,23
|
2,78
|
9,01
|
67,2
|
| Условие прочности выполняется: 134,9 МПа < 217,9 МПа
|
| Rod 140
|
1
|
144,4
|
28,7
|
0
|
15,4
|
44,1
|
163,3
|
| 2
|
75,1
|
0
|
28,4
|
15,4
|
43,8
|
106,7
|
| Условие прочности выполняется: 99,9 МПа < 217,9 МПа
|
| Rod 138
|
1
|
99,9
|
8,27
|
0
|
4,65
|
12,9
|
102,4
|
| 2
|
65,4
|
0
|
3,069
|
4,65
|
7,72
|
66,8
|
Вывод: расчеты показывают что прочность боковых и хребтовых балок рамы в рассматриваемых сечениях достаточна.
2.3.3 Проверка жесткости боковых и хребтовых балок рамы стенда
Исходные данные: номера стержней в месте максимального прогиба и их узлов, а также величина максимального перемещения в пролете взяты из Приложения В и приведены в таблице 16.
Таблица 16 – Исходные данные
| № стержня
|
№ узла
|
Расстояние L, мм
|
Перемещение f, мм
|
| Rod57
|
87
|
17100
|
37
|
| Rod 255
|
86
|
24,2
|
| Rod 256
|
85
|
18,6
|
| Rod 60
|
84
|
3,71
|
| Rod 57
|
87
|
14410
|
27,5
|
| Rod 255
|
86
|
17,5
|
| Rod 256
|
85
|
12,9
|
| Rod 60
|
84
|
0,727
|
| Rod 57
|
48
|
11720
|
16,5
|
| Rod 255
|
114
|
9,95
|
| Rod 256
|
115
|
6,34
|
| Rod 60
|
84
|
1,98
|
Цель расчета: проверка жесткости рамы стенда.
Условие расчета: в APM WinMachine установлено, что на раму стенда воздействуют самые неблагоприятные нагрузки при вывешивании путевой решетки на 20 мм и сдвиг на 150 мм. Усилие вывешивание 150 кН, усилие сдвига 170 кН.


Рисунок 30 – Расчетная схема
Проверка жесткости заключается в сравнении допустимого прогиба с относительным расчетным прогибом.
Условие жесткости:
 , (37) , (37)
где f – максимальный прогиб, м; L – расстояние между заделками балки, м;  – относительный прогиб; – относительный прогиб;  – допускаемый прогиб, – допускаемый прогиб,  0,005. 0,005.
Результаты расчетов приведены в таблице 17.
Таблица 17 – Результаты расчетов
| № стержня
|
Расстояние
L, мм
|
Перемещение
f, мм
|
|
|
| Rod57
|
17100
|
37
|
0,0022
|
0,0022 < 0,002
|
| Rod 255
|
24,2
|
0,0014
|
0,0014 < 0,002
|
| Rod 256
|
18,6
|
0,0011
|
0,0011 < 0,002
|
| Rod 60
|
3,71
|
0,0002
|
0,0002 < 0,002
|
| Rod 57
|
14410
14410
|
27,5
|
0,0019
|
0,0019 < 0,002
|
| Rod 255
|
17,5
|
0,0012
|
0,0012 < 0,002
|
| Rod 256
|
12,9
|
0,0009
|
0,0009 < 0,002
|
| Rod 60
|
0,727
|
0,00005
|
0,00005 < 0,002
|
| Rod 57
|
11720
|
16,5
|
0,0014
|
0,0014 < 0,002
|
| Rod 255
|
9,95
|
0,0008
|
0,0008 < 0,002
|
| Rod 256
|
6,34
|
0,0005
|
0,0005 < 0,002
|
| Rod 60
|
1,98
|
0,0002
|
0,0002 < 0,002
|
Вывод: из таблицы 17 видно, что относительный прогиб меньше допускаемого, следовательно, жесткость балок рамы достаточна.
3 Порядок проведения работ на стенде
1. Провести инструктаж по технике безопасности со студентами под их личную роспись.
2. Перед началом работы, учитель обязан осмотреть и проверить техническое состояние узлов и деталей стенда и убедиться в их исправности.
3. Если стенд исправен, то можно приступать к выполнению лабораторных работ на нем.
4. Для работы на стенде необходимо запустить двигатель насосной станции.
5. Вывешивание и сдвиг рельсошпальной решетки производится подъемно-рихтовочным устройством, управление которым осуществляется с помощью сервоуправления насосной станции.
6. Величину вывешивания или сдвижки рельсошпальной решетки определяют визуально по стационарно установленным вертикальной и горизонтальной линейке.
7. Усилие на штоках гидроцилиндров вывешивания и сдвига вычисляют, зная диаметр поршня и давление в напорной линии трубопровода определяемое по манометрам с помощью известных формул по дисциплине «Гидропривод».
6. Вывешивание и сдвиг рельсошпальной решетки можно производить при трех различных положениях задней тележки стенда.
Для изменения положения тележки необходимо:
а) с помощью сервоуправления насосной станции привести в работу аутригеры и поднять раму стенда на величину необходимую для того чтобы вывести из соединения шкворень тележки из шкворневой балки рамы стенда;
б) убедиться что шкворень вышел из соединения и соблюдая технику безопасности произвести вручную перекатывание задней тележки в одну из двух дополнительных позиций;
в) визуально убедиться, что шкворень тележки расположен соосно с отверстием в
шкворневой балке и произвести опускание рамы стенда с помощью аутригеров;
г) произвести лабораторные испытания при новом положении задней тележки;
д) для установки задней тележки в другое положение и проведение новых испытаний, произвести операции указанные в пунктах а – г.
4 ЭКОНОМИЧЕСКИЙ РАСЧЕТ
Целью экономического расчета является определение затрат на изготовление металлоконструкции стенда для вывешивания и сдвига рельсошпальной решетки.
Основными затратами на изготовление являются затраты на приобретение материалов, проектно - конструкторские работы, а также на оплату труда производственного персонала и накладные расходы.
К покупным изделиям относятся: сортовой прокат (двутавры, квадратные трубы, уголки), листовой прокат, гидроцилиндры и тележки.
Стоимость покупных изделий сведена в таблицу 18.
В расчетах цены приведены 2010 года.
Таблица 18 - Стоимость покупных комплектующих
| Наименование
|
Размеры, мм
|
Количество, шт
|
Стоимость, руб
|
| Двутавр №60
|
23650
|
4
|
447704
|
| Квадратная труба
|
150 х 8 х 2668
|
7
|
22550,7
|
| Квадратная труба
|
150 х 10 х 2830
|
1
|
4451,3
|
| Квадратная труба
|
60 х 5 х 790
|
4
|
6988,3
|
| Квадратная труба
|
60 х 5 х 710
|
4
|
| Квадратная труба
|
60 х 5 х 725
|
2
|
| Квадратная труба
|
60 х 5 х 2620
|
2
|
| Квадратная труба
|
60 х 5 х 670
|
3
|
| Квадратная труба
|
60 х 5 х 1070
|
3
|
| Квадратная труба
|
60 х 5 х 640
|
6
|
| Квадратная труба
|
100 х 9 х 790
|
2
|
8008
|
| Квадратная труба
|
100 х 9 х 560
|
2
|
| Квадратная труба
|
100 х 9 х 450
|
6
|
| Квадратная труба
|
100 х 9 х 130
|
8
|
| Квадратная труба
|
100 х 9 х 784
|
2
|
| Уголок
|
50 х 50 х 3000
|
1
|
285,3
|
| Уголок
|
100 х 7 х 400
|
1
|
124,8
|
| Лист
|
1000 х 1000 х 10
|
1
|
2362
|
| Лист
|
1000 х 1000 х 20
|
1
|
4969
|
| Палец
|
44 х 100
|
2
|
762,3
|
| Палец
|
32 х 60
|
2
|
510,4
|
| Тележка
|
-
|
2
|
180000
|
| ПРУ
|
-
|
1
|
100000
|
| Насосная станция
|
-
|
1
|
90000
|
| ВСЕГО:
|
868716,1
|
Таблица 19 - Стоимость узлов
| Узел
|
mi
,т
|
Цена, руб
|
| Стоимость сварных конструкций
|
7,1
|
298200
|
| Стоимость узлов подлежащих механической обработке
|
3,5
|
140000
|
| Итого
|
10,6
|
438200
|
Основная заработная плата производственных рабочих на изготовление сварных конструкций Зпл1
, руб:
Зпл1
= Cтч
∙ ti
1
∙ mi
1
∙ kp
∙ kпр
∙ kнач
, (37)
где Cтч
- часовая тарифная ставка 4 разряда, Cтч
= 60 руб./ч; ti
1
- трудоемкость изготовления 1 т сварной конструкции, ti
1
= 100 чел. – ч [14]; mi
1
- масса сварных узлов, mi
1
= 7,1 т; kp
- районный коэффициент, kp
= 1,25 [14]; kпр
- коэффициент премирования, kпр
= 1,5 [14]; kнач
- коэффициент, учитывающий начисления на заработную плату, kнач
= 1,262 [14].
Зпл1
= 60 ∙ 100 ∙ 7,1∙ 1,25 ∙ 1,5 ∙ 1,262 = 100802,3 руб.
Основная заработная плата производственных рабочих на механическую обработку Зпл2
, руб:
Зпл2
= Cтч
∙ ti
2
∙ mi
2
∙ kp
∙ kпр
∙ kнач
, (38)
где Cтч
- часовая тарифная ставка, Cтч
= 60 руб.; ti
2
- трудоемкость изготовления узлов подлежащих механической обработке, ti
2
= 300 чел. – ч [14]; mi
2
- масса узлов, механической обработки, mi
= 3,5 т; kp
- районный коэффициент,
kp
= 1,25 [14]; kпр
- коэффициент премирования, kпр
= 1,5 [14]; kнач
- коэффициент, учитывающий начисления на заработную плату, kнач
= 1,262 [14].
Зпл2
= 60 ∙ 300 ∙ 3,5 ∙ 1,25 ∙ 1,5 ∙ 1,262 = 149073,8 руб.
Основная заработная плата производственных рабочих на сборку Зпл3
, руб:
Зпл3
= Cтч
∙ ti
2
∙ mi
2
∙ kp
∙ kпр
∙ kнач
, (39)
где Cтч
- часовая тарифная ставка, Cтч
= 60 руб.; ti
2
- трудоемкость прочих узлов,
ti
2
= 80 чел. – ч [14]; mi
2
- масса узлов сборки, mi
= 2 т; kp
- районный коэффициент, kp
= 1,25 [14]; kпр
- коэффициент премирования, kпр
= 1,5 [14]; kнач
- коэффициент, учитывающий начисления на заработную плату, kнач
= 1,262 [14].
Основная заработная плата производственных рабочих на сборку Зпл3
:
Зпл3
= 60 ∙ 80 ∙ 2 ∙ 1,25 ∙ 1,5 ∙ 1,262 =22716 руб.
К перечисленным выше расходам необходимо добавить расходы на проектно-конструкторские работы Зпр-кон
, тыс. руб.:
Зпр-кон
= ТРп-к
∙ Ст
∙ kp
∙ kпр
∙ kнач
, (40)
где ТРп-к
- трудоемкость, ТРп-к
= 80 ч; Сm
- часовая оплата, Сm
= 150 руб/ч [14]; kp
- районный коэффициент, kp
= 1,25 [14]; kпр
- коэффициент премирования, kпр
= 1,5 [14]; kнач
- коэффициент, учитывающий начисления на заработную плату, kнач
= 1,262 [14].
Зпр-кон
= 80 ∙ 150 ∙ 1,25 ∙ 1,5 ∙ 1,262 = 28395 руб.
Итого основная заработная плата производственных рабочих Зпло
, руб.:
Зпло
= Зпл1
+ Зпл2
+ Зпл3
+Зпр-кон
, (41)
Зпло
= 100802,3 +149073,8+22716+28395 = 300987,1 руб.
Дополнительная заработная плата производственных рабочих ЗПЛД
:
ЗПЛД
= Зпло
∙ НДЗ
, (42)
где НДЗ
- норматив дополнительной заработной платы, НДЗ
= 0,15 [14].
ЗПЛД
= 300987,1 ∙ 0,15 = 45148,1 руб.
Накладные расходы Нр
, руб.:
Нр
= Зпло
∙ ННР
, (43)
где ННР
- норматив накладных расходов, ННР
= 0,3 [14].
Нр
= 300987,1 ∙ 0,3 = 90296,1 руб.
Полная себестоимость изготовления Сп
, руб.:
Сп
= См
+ СКОМ
+ Зпло
+ ЗПЛД
+ НР
, (44)
где СКОМ
- суммарные затраты на комплектующие, руб.
Сп
= 438200 + 868716,1+ 300987,1 + 45148,1 + 90296,1 = 1743347,4 руб.
Для учета в составе себестоимости прибыли в размере 35 % определим себестоимость за вычетом материальных затрат:
Свм
= Сп
- См
-СКОМ
, (45)
Свм
= 1743347,4 – 438200 – 868716,1 = 436431,3 руб.
Прибыль П, руб:
П = 0,35∙Свм
, (46)
П = 0,35 ∙ 436431,3 = 152750,9 руб.
Капитальные затраты на изготовление рабочего оборудования для удержания установки К, руб:
К = Сп
+ П, (47)
К = 1743347,4 + 152750,9= 1896098,3 руб.
Таким образом, расчетная себестоимость изготовления стенда для вывешивания рельсошпальной решетки составит 1896098,3 руб.
5 ОХРАНА ТРУДА
5.1 Состояние условий труда при стендовых испытаниях
При испытании на стенде в ряде случаев возникают условия, неблагоприятные для исполнителей работ. Опасности, имеющие место на рабочем месте, при испытании подразделяются на импульсные и аккумулятивные [1].
Источниками импульсных опасностей являются подвижные массы, потоки газов и жидкостей, неправильное размещение оборудования на рабочем месте. Импульсная опасность, приводящая к травме, мгновенно реализуется в случайные моменты времени и может быть представлена дискретной случайной функцией производственного процесса.
Источниками аккумулятивных опасностей являются: повышенный шум, загрязненность воздушной среды газами и парами. В результате действия этих факторов организм человека переутомляется, нарушается координация движений, притупляется реакция организма на внешние раздражители. Аккумулятивная опасность реализуется на протяжении всего производственного процесса, представляя его непрерывную функцию и приводит к повышенному утомлению, заболеваниям.
5.2 Анализ вредных и опасных факторов
Таблица 20 – Анализ вредных и опасных факторов при работе на стенде
| № п/п
|
Опасные и вредные факторы
|
Характеристика опасных и вредных факторов
|
| 1
|
Шум
|
Шум как физиологическое явление представляет собой неблагоприятный фактор
Внешней среды и определяется как звуковой
процесс, неблагоприятный для восприятия и мешающий работе и отдыху. По физической природе шум, создаваемый стендом, обусловлен процессами механического воздействия деталей.
|
| 2
|
Освещенность
|
Свет является естественным условием жизнедеятельности человека и играет большую роль в сохранении здоровья и высокой работоспособности. Недостаточная освещенность требует не только постоянного напряжения глаз, что приводит к переутомлению и снижению работоспособности, но также может привести к тому, что будут незамечены некоторые изменения в работе стенда.
|
| 3
|
Опасность травмирования при работе с подъемно-рихтовочным устройством
|
При работе подъемно-рихтовочного устройства есть вероятность получения травмы конечностей, врезультате защемления их элементами устройства или рельсошпальной решетки
|
| 4
|
Опасность травмирования при работе аутригеров
|
При осуществлении подъема рамы с помощью аутригеров, стенда есть вероятность получения травмы при возникновении аварийной ситуации
|
| 5
|
Пожароопасность
|
В ходе разборки, ремонта, масло может быть разлито, и при небрежном отношении к мерам пожарной безопасности могут привести к возникновению пожара.
|
5.3 Требования нормативно-технической документации по охране труда
Таблица 21 – Требования нормативно-технической документации по охране труда.
| № п/п
|
Требования
|
Нормативный документ
|
| 1
|
Рабочее место, его оборудование и оснащение, применяемые в соответствии с характером работы, должны обеспечивать безопасность, охрану здоровья и работоспособность
работающих
|
ГОСТ 12.2.061-81.
Оборудование.
|
| 2
|
Шум на рабочем месте не должен превышать 80 дБА.
|
ГОСТ 12.1.003-83.
Шум. Общие требования безопасности.
|
| 3
|
Производственное оборудование должно иметь встроенное устройство для удаления выделяющихся в процессе работы вредных веществ непосредственно от места их образования и скопления.
|
ГОСТ 12.2.003-74.
|
| 4
|
Приводные части стенда, а также передачи, к которым возможен доступ людей, должны быть ограждены.
|
ГОСТ 12.2.002-80.
Ограждения. Общие требования.
|
| 5
|
Движущиеся элементы оборудования, к которым возможен доступ обслуживающего персонала, должны быть ограждены со всех сторон и по всей длине, независимо от высоты расположения и скорости движения.
|
ГОСТ 12.2.027-80.
Оборудование гаражное и авторемонтное.
|
| 6
|
Органы управления, связанные с определенной последовательностью их применения, должны группироваться таким образом, чтобы действия работающего осуществлялись слева направо и сверху вниз.
|
ГОСТ 12.2.064-81.
Органы управления производственным оборудованием.
|
| 7
|
В конструкциях органов управления, предназначенных для включения оборудования, должны быть предусмотрены средства защиты от случайного включения.
|
ГОСТ 12.2.027-80.
|
5.4. Мероприятия по защите работающих от опасных и вредных факторов
Для того чтобы уменьшить или исключить вообще влияние опасных и вредных факторов на человека необходим целый комплекс мер по охране труда .
Методы борьбы с шумом.
Одним из методов борьбы с шумом является применение наушников снижающих уровень звукового давления от 3 до 36 дБ [2].
Освещение.
Проводить испытания на стенде только в дневное время.
Предотвращение возникновения пожара.
Необходимо строгое выполнение требований безопасности при хранении и использовании горюче-смазочных материалов. Необходимо оборудовать противопожарный щит средствами пожаротушения. На рабочем месте запрещается пользоваться открытым огнем и курить. Обтирочный материал хранить только в металлических закрытых ящиках.
Мероприятия по защите работающих при подъемно-рихтовочных работах.
Перед пользованием подъемно-рихтовочного устройства, необходимо проверить его состояние и в случае необходимости провести ремонт.
Для безопасной эксплуатации подъемно-рихтовочного устройства, необходимо находится на расстоянии не менее 3 – 5 м от стенда, во избежание получения травм в результате вывешивания и сдвига рельсошпальной решетки .
Мероприятия по защите работающих при работе аутригеров.
Во избежание травмы необходимо находится на безопасном расстоянии (3-5 м)
5.5 Техника безопасности
5.5.1 Общие требования
1. Не допускаются к управлению стендом лица, не прошедшие обучение и не аттестованные по профессии стропальщика и станочника, а также лица, моложе 18 лет [1].
2. Запрещается разборка и ремонт гидросистемы, находящейся под давлением.
3. Запрещается работа на неисправном гидроприводе, при неисправном манометре, а также на не рекомендуемой жидкости.
5.5.2 Требования перед началом работы
1. Перед началом работы учитель обязан осмотреть и проверить техническое состояние узлов и деталей стенда и убедиться в их исправности.
2. Проверке на исправность и надежность подлежат: ограждения и защитные кожухи перемещающихся узлов стенда, а также их крепление; трубопроводы и соединения гидросистемы; система управления стендом.
3. Работать на стенде, имеющем неисправности, запрещается.
4. Необходимо убедиться в наличии на рабочем месте средств индивидуальной защиты, средств пожаротушения и средств оказания первой медицинской помощи.
5.5.3 Требования во время работы
1. При появлении во время работы стенда посторонних шумов, стуков и т.д. необходимо отключить стенд и проверить откуда исходят данные признаки неисправности.
2. Во время работы стенда запрещается:
- отвлекаться от выполнения прямых обязанностей;
- передавать управление стендом лицам, не имеющим на это разрешение.
5.5.4 Требования по окончании работ
1. По окончании работ учитель обязан:
- перевести подъемно-рихтовочное устройство в транспортное положение;
- заглушить двигатель насосной станции;
5.5.5 Требования в аварийной ситуации
При возникновении аварийной ситуации учитель обязан заглушить двигатель насосной станции.
Заключение
В разработанном мной дипломном проекте стенд стоимостью 1993368,3 рублей, получился вполне работоспособным и готовым к проведению лабораторных работ на нем. Прочностной расчет и расчет на жесткость показывают, что металлоконструкция стенда сможет выдержать те нагрузки, которые возникают при вывешивании и сдвиге рельсошпальной решетки на требуемые в задание величины (вывешивание на 250 мм и сдвиг на 150 мм) с помощью подъемно-рихтовочного устройства.
Данный дипломный проект требует доработок по уменьшею металлоемкости не в ущерб прочности и жесткости, а также снижение денежных затрат на изготавление данного лабораторного стенда.
Список использованных источников
1. Безопасность жизнедеятельности. Производственная безопасность и охрана труда / П.П. Кукин, В.Л. Лапин, Н.Л. Пономарев и др. М., 2001. 431 с.
2. Васильев И.В., Хальзов В.Л., Петриченко Н.А. Вопросы чрезвычайных ситуаций и гражданской обороны в дипломных проектах: учебно-методическое пособие. Новосибирск. 2001. 130 с.
3. Глотов В.А. Выбор сталей для металлоконструкций машин: Учеб. пособие. Новосибирск: Изд-во СГУПСа. 1997. 20 с.
4. Задорин Г.П. Путеподъемные и выправочные устройства: Учеб. пособие. Новосибирск: Из-во СГУПСа. 1998. 52 с.
5. Краснов Л.А. Справочник для решения задач по сопротивлению материалов: Учеб. пособие. Новосибирск: Изд-во СГУПСа. 2004. 118 с.
6. Машина выправочно-подбивочно-рихтовочная: ВПР-02: Техническое описание и инструкция по эксплуатации / Министерство путей сообщения РФ. М., 1995. 415 с.
7. Машины и механизмы для путевого хозяйства / Соломонов С.А., Хабаров В.П., Малицкий Л.Я., Нуждин Н.М. М., 1984. 440 с.
8. ООО "Склад металла" // http://www.skladmetalla.ru/ .
9. Раздорожный А.А. Охрана труда и производственная безопасность: учебно-методическое пособие. М., 2006. 512 с.
10. Соломонов С.А., Попович М.В., Бугаенко В.М. Путевые машины: Учебник. Москва: Изд-во Желдориздат. 2000. 756 с.
11. СТО СГУПС 1.01 – 2007. Курсовой и дипломный проекты. Требования к оформлению. Новосибирск. 2007. 59с.
12. СТО СГУПС 1.02 – 2008. Система управления качеством. Работа выпускная квалификационная по специальности «Подъемно-транспортные,
строительные, дорожные машины и оборудование». Новосибирск. 2007. 28с.
13. Сырейщиков Ю.П. Новые путевые машины : подбивочно-выправочные и рихтовочная ВПР-1200, ВПРС-500 и Р-2000. М., 1984. 319 с.
14. Экономическая эффективность внедрения новой (модернизированной) техники / Ядрошникова Г.Г., Хекало О.Ю., Шаламова О.А., Юркова Е.О. Новосибирск: Изд-во СГУПСа. 2004. 12 с.
Приложение А Распечатка усилий в опасных сечениях стержней
Индекс стержня 44 (Rod 57)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 48
|
-105192.73
|
-9142.98
|
-24310.09
|
-951838.15
|
9520770.04
|
96766275.91
|
| 87
|
-105192.73
|
-9142.98
|
-24310.09
|
-951838.15
|
16813795.80
|
99509169.35
|
Индекс стержня 156 (Rod 255)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 114
|
-165042.34
|
145698.02
|
43840.19
|
-170081.88
|
15908952.57
|
104908623.23
|
| 86
|
-165042.34
|
145698.02
|
43840.19
|
-170081.88
|
3633700.65
|
64113179.03
|
Индекс стержня 157 (Rod 256)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 115
|
165601.65
|
-122180.82
|
42870.20
|
-54389.10
|
15790903.44
|
17669732.44
|
| 85
|
165601.65
|
-122180.82
|
42870.20
|
-54389.10
|
3787248.59
|
51880362.05
|
Индекс стержня 45 (Rod 60)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 51
|
106781.80
|
3998.43
|
-21633.22
|
-350903.56
|
9986541.97
|
-1150664.31
|
| 84
|
106781.80
|
3998.43
|
-21633.22
|
-350903.56
|
16476509.14
|
-2350193.38
|
Индекс стержня 4 (Rod 7)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 8
|
-20948.75
|
10451.56
|
9440.72
|
-117110.28
|
12395174.05
|
-8298065.56
|
| 7
|
-20948.75
|
10451.56
|
9440.72
|
-117110.28
|
-13000354.74
|
-36412762.38
|
Индекс стержня 14 (Rod 19)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 21
|
4337.22
|
35802.81
|
10555.23
|
-116439.59
|
14145145.27
|
8672825.94
|
| 19
|
4337.22
|
35802.81
|
10555.23
|
-116439.59
|
-14248421.59
|
-87636728.21
|
Индекс стержня 34 (Rod 42)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 45
|
-4077.96
|
16541.56
|
10554.40
|
-115248.13
|
14143931.65
|
-16087985.99
|
| 43
|
-4077.96
|
16541.56
|
10554.40
|
-115248.13
|
-14247396.63
|
-60584774.32
|
Индекс стержня 24 (Rod 31)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 33
|
20865.70
|
-11253.67
|
9424.35
|
-106613.20
|
12373128.25
|
-29522795.67
|
| 31
|
20865.70
|
-11253.67
|
9424.35
|
-106613.20
|
-12978378.71
|
749581.55
|
Индекс стержня 130 (Rod 211)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 3
|
145325.80
|
-74261.93
|
-27000.75
|
31350.99
|
-12844648.66
|
-381117408.69
|
| 99
|
145325.80
|
-74261.93
|
-27000.75
|
31350.99
|
15506135.16
|
-303142386.08
|
Индекс стержня 128 (Rod 209)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 14
|
262671.56
|
-43378.06
|
-38010.15
|
31687.60
|
-14664479.66
|
-235392396.85
|
| 98
|
262671.56
|
-43378.06
|
-38010.15
|
31687.60
|
25246176.90
|
-189845434.62
|
Индекс стержня 126 (Rod 207)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 38
|
-263328.77
|
-33375.21
|
-38011.61
|
32330.95
|
-14664707.93
|
-187670621.64
|
| 97
|
-263328.77
|
-33375.21
|
-38011.61
|
32330.95
|
25247478.30
|
-152626651.12
|
Индекс стержня 124 (Rod 205)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 26
|
-144492.37
|
-5294.56
|
-27002.80
|
34074.02
|
-12844988.05
|
-34289368.52
|
| 96
|
-144492.37
|
-5294.56
|
-27002.80
|
34074.02
|
15507954.89
|
-28730085.54
|
Индекс стержня 5 (Rod 8)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 9
|
-27803.68
|
23481.70
|
12457.97
|
-104609.41
|
16542948.94
|
3644305.02
|
| 8
|
-27803.68
|
23481.70
|
12457.97
|
-104609.41
|
-16968977.73
|
-59521467.13
|
Индекс стержня 15 (Rod 20)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 17
|
9653.56
|
34670.43
|
13612.46
|
-113933.27
|
18199116.50
|
11662486.23
|
| 21
|
9653.56
|
34670.43
|
13612.46
|
-113933.27
|
-18418393.89
|
-81600983.31
|
Индекс стержня 35 (Rod 43)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 41
|
-9180.53
|
15523.11
|
13611.44
|
-115655.87
|
18197630.58
|
-13335499.00
|
| 45
|
-9180.53
|
15523.11
|
13611.44
|
-115655.87
|
-18417137.74
|
-55092658.37
|
Индекс стержня 25 (Rod 32)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 29
|
27594.71
|
-5211.29
|
12439.18
|
-114529.71
|
16516358.81
|
-20730946.96
|
| 33
|
27594.71
|
-5211.29
|
12439.18
|
-114529.71
|
-16945022.59
|
-6712587.46
|
Индекс стержня 89 (Rod 153)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 79
|
-32552.78
|
39017.92
|
14042.31
|
-107930.75
|
9092821.02
|
3365019.03
|
| 9
|
-32552.78
|
39017.92
|
14042.31
|
-107930.75
|
-16850350.75
|
-68720585.66
|
Индекс стержня 87 (Rod 151)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 78
|
26433.39
|
35250.03
|
22106.31
|
-122770.45
|
19045028.00
|
-11507644.44
|
| 17
|
26433.39
|
35250.03
|
22106.31
|
-122770.45
|
-21796373.14
|
-76632068.71
|
Индекс стержня 85 (Rod 149)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 77
|
-25997.98
|
25128.07
|
22096.52
|
-121130.34
|
19033235.80
|
-8583371.87
|
| 41
|
-25997.98
|
25128.07
|
22096.52
|
-121130.34
|
-21790087.44
|
-55007484.25
|
Индекс стержня 83 (Rod 147)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 76
|
32351.75
|
-1518.03
|
14030.34
|
-113574.84
|
9085604.65
|
-10073357.71
|
| 29
|
32351.75
|
-1518.03
|
14030.34
|
-113574.84
|
-16835449.95
|
-7268803.97
|
Индекс стержня 102 (Rod 177)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 85
|
826.28
|
-112090.98
|
-103401.97
|
2496069.10
|
-19079486.01
|
-17003910.73
|
| 86
|
826.28
|
-112090.98
|
-103401.97
|
2496069.10
|
19179242.80
|
24469752.12
|
Индекс стержня 100 (Rod 175)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 84
|
-32973.87
|
15231.19
|
-12112.64
|
587806.61
|
-7167226.25
|
593940.63
|
| 85
|
-32973.87
|
15231.19
|
-12112.64
|
587806.61
|
6822876.71
|
-16998083.61
|
Индекс стержня 101 (Rod 176)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 87
|
35713.19
|
-22335.33
|
-12042.44
|
-221439.99
|
-7068519.23
|
-1228507.11
|
| 86
|
35713.19
|
-22335.33
|
-12042.44
|
-221439.99
|
6840504.66
|
24568793.35
|
Индекс стержня 79 (Rod 138)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 55
|
-2757.70
|
6184.57
|
23786.92
|
-1668535.20
|
14233848.59
|
103326.62
|
| 73
|
-2757.70
|
6184.57
|
23786.92
|
-1668535.20
|
-13240038.51
|
-7039849.30
|
Индекс стержня 80 (Rod 139)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 53
|
3547.89
|
-12559.52
|
23660.26
|
-998344.29
|
14129759.26
|
-305102.29
|
| 72
|
3547.89
|
-12559.52
|
23660.26
|
-998344.29
|
-13197838.68
|
14201142.48
|
Индекс стержня 81 (Rod 140)
| Узел
|
Сила [Н]
|
Момент [Н*мм]
|
| Fx (осевая)
|
Fy
|
Fz
|
Mx (кручения)
|
My
|
Mz
|
| 73
|
238.56
|
-57257.10
|
82663.57
|
-5509960.17
|
15267323.78
|
-7030285.52
|
| 72
|
238.56
|
-57257.10
|
82663.57
|
-5509960.17
|
-15318196.86
|
14154841.64
|
Приложение Б Напряжения в узлах стержней
Название документа: Рама платформы-19.FRM
Напряжение в стержне (макс.) [Н/мм^2] (Загружение 1)
| N
|
Название
|
Узлы
|
Экв. напряжение
|
| 0
|
Rod 0
|
0,6
|
2.88
|
| 1
|
Rod 4
|
5,48
|
149
|
| 2
|
Rod 5
|
6,2
|
30.5
|
| 3
|
Rod 6
|
7,1
|
2.92
|
| 4
|
Rod 7
|
8,7
|
95.3
|
| 5
|
Rod 8
|
9,8
|
104
|
| 6
|
Rod 9
|
2,10
|
24.2
|
| 7
|
Rod 10
|
10,3
|
61.1
|
| 8
|
Rod 11
|
4,11
|
112
|
| 9
|
Rod 12
|
11,53
|
105
|
| 10
|
Rod 14
|
12,13
|
2.88
|
| 11
|
Rod 16
|
16,49
|
223
|
| 12
|
Rod 17
|
13,18
|
34.8
|
| 13
|
Rod 18
|
19,20
|
2.92
|
| 14
|
Rod 19
|
21,19
|
149
|
| 15
|
Rod 20
|
17,21
|
96.8
|
| 16
|
Rod 21
|
18,22
|
26
|
| 17
|
Rod 22
|
22,14
|
68.3
|
| 18
|
Rod 23
|
15,23
|
137
|
| 19
|
Rod 24
|
23,72
|
111
|
| 20
|
Rod 26
|
24,25
|
2.88
|
| 21
|
Rod 28
|
28,51
|
57.4
|
| 22
|
Rod 29
|
25,30
|
30.7
|
| 23
|
Rod 30
|
31,32
|
2.92
|
| 24
|
Rod 31
|
33,31
|
88.1
|
| 25
|
Rod 32
|
29,33
|
67
|
| 26
|
Rod 33
|
30,34
|
24.2
|
| 27
|
Rod 34
|
34,26
|
60.7
|
| 28
|
Rod 35
|
27,35
|
72.9
|
| 29
|
Rod 36
|
35,55
|
71.8
|
| 30
|
Rod 37
|
36,37
|
2.88
|
| 31
|
Rod 39
|
40,50
|
127
|
| 32
|
Rod 40
|
37,42
|
35.1
|
| 33
|
Rod 41
|
43,44
|
2.92
|
| 34
|
Rod 42
|
45,43
|
122
|
| 35
|
Rod 43
|
41,45
|
72.4
|
| 36
|
Rod 44
|
42,46
|
26
|
| 37
|
Rod 45
|
46,38
|
67.9
|
| 38
|
Rod 46
|
39,47
|
128
|
| 39
|
Rod 47
|
47,73
|
123
|
| 40
|
Rod 48
|
25,37
|
11.2
|
| 41
|
Rod 50
|
6,13
|
11.1
|
| 42
|
Rod 51
|
31,43
|
23.7
|
| 43
|
Rod 52
|
19,7
|
86
|
| 44
|
Rod 57
|
48,87
|
185
|
| 45
|
Rod 60
|
51,84
|
89.1
|
| 46
|
Rod 61
|
33,45
|
70.8
|
| 47
|
Rod 62
|
21,8
|
57
|
| 48
|
Rod 64
|
29,41
|
55.9
|
| 49
|
Rod 65
|
9,17
|
52.4
|
| 50
|
Rod 85
|
53,5
|
80.8
|
| 51
|
Rod 90
|
55,28
|
47.7
|
| 52
|
Rod 98
|
13,57
|
4.3
|
| 53
|
Rod 99
|
57,37
|
4.37
|
| 54
|
Rod 100
|
41,58
|
33.8
|
| 55
|
Rod 101
|
58,17
|
33.5
|
| 56
|
Rod 102
|
45,59
|
41.5
|
| 57
|
Rod 103
|
59,21
|
42.2
|
| 58
|
Rod 104
|
43,60
|
45.6
|
| 59
|
Rod 105
|
60,19
|
104
|
| 60
|
Rod 110
|
61,70
|
134
|
| 61
|
Rod 111
|
62,61
|
108
|
| 62
|
Rod 117
|
50,63
|
130
|
| 63
|
Rod 118
|
63,56
|
80.8
|
| 64
|
Rod 119
|
56,64
|
82.2
|
| 65
|
Rod 120
|
64,49
|
124
|
| 66
|
Rod 125
|
65,71
|
132
|
| 67
|
Rod 126
|
66,65
|
106
|
| 68
|
Rod 127
|
67,69
|
137
|
| 69
|
Rod 128
|
68,67
|
118
|
| 70
|
Rod 129
|
68,62
|
130
|
| 71
|
Rod 130
|
66,62
|
121
|
| 72
|
Rod 131
|
69,49
|
205
|
| 73
|
Rod 132
|
70,56
|
126
|
| 74
|
Rod 133
|
71,50
|
198
|
| 75
|
Rod 134
|
69,70
|
147
|
| 76
|
Rod 135
|
71,70
|
137
|
| 77
|
Rod 136
|
72,16
|
109
|
| 78
|
Rod 137
|
73,40
|
127
|
| 79
|
Rod 138
|
55,73
|
134
|
| 80
|
Rod 139
|
53,72
|
170
|
| 81
|
Rod 140
|
73,72
|
171
|
| 82
|
Rod 146
|
54,88
|
53.4
|
| 83
|
Rod 147
|
76,29
|
66.3
|
| 84
|
Rod 148
|
75,89
|
91.5
|
| 85
|
Rod 149
|
77,41
|
91.1
|
| 86
|
Rod 150
|
74,90
|
104
|
| 87
|
Rod 151
|
78,17
|
92
|
| 88
|
Rod 152
|
52,91
|
135
|
| 89
|
Rod 153
|
79,9
|
90.4
|
| 90
|
Rod 165
|
27,39
|
143
|
| 91
|
Rod 166
|
4,15
|
143
|
| 92
|
Rod 167
|
39,15
|
113
|
| 93
|
Rod 168
|
76,77
|
70.7
|
| 94
|
Rod 169
|
79,78
|
69.3
|
| 95
|
Rod 170
|
77,78
|
90.6
|
| 96
|
Rod 171
|
84,54
|
71.9
|
| 97
|
Rod 172
|
85,75
|
124
|
| 98
|
Rod 173
|
86,74
|
142
|
| 99
|
Rod 174
|
87,52
|
168
|
| 100
|
Rod 175
|
84,85
|
97.9
|
| 101
|
Rod 176
|
87,86
|
146
|
| 102
|
Rod 177
|
85,86
|
195
|
| 103
|
Rod 178
|
88,76
|
67.4
|
| 104
|
Rod 179
|
89,77
|
103
|
| 105
|
Rod 180
|
90,78
|
100
|
| 106
|
Rod 181
|
91,79
|
107
|
| 107
|
Rod 185
|
80,92
|
73
|
| 108
|
Rod 186
|
92,27
|
67.5
|
| 109
|
Rod 187
|
81,93
|
152
|
| 110
|
Rod 188
|
93,39
|
134
|
| 111
|
Rod 189
|
82,94
|
163
|
| 112
|
Rod 190
|
94,15
|
141
|
| 113
|
Rod 191
|
83,95
|
157
|
| 114
|
Rod 192
|
95,4
|
126
|
| 115
|
Rod 193
|
92,93
|
137
|
| 116
|
Rod 194
|
94,95
|
132
|
| 117
|
Rod 195
|
93,94
|
107
|
| 118
|
Rod 196
|
35,47
|
138
|
| 119
|
Rod 197
|
11,23
|
139
|
| 120
|
Rod 198
|
47,23
|
122
|
| 121
|
Rod 202
|
80,81
|
128
|
| 122
|
Rod 203
|
83,82
|
130
|
| 123
|
Rod 204
|
81,82
|
122
|
| 124
|
Rod 205
|
26,96
|
92.1
|
| 125
|
Rod 206
|
96,80
|
68.2
|
| 126
|
Rod 207
|
38,97
|
195
|
| 127
|
Rod 208
|
97,81
|
183
|
| 128
|
Rod 209
|
14,98
|
209
|
| 129
|
Rod 210
|
98,82
|
199
|
| 130
|
Rod 211
|
3,99
|
222
|
| 131
|
Rod 212
|
99,83
|
175
|
| 132
|
Rod 213
|
96,97
|
134
|
| 133
|
Rod 214
|
99,98
|
131
|
| 134
|
Rod 215
|
97,98
|
155
|
| 135
|
Rod 222
|
68,100
|
83
|
| 136
|
Rod 223
|
100,101
|
1.49e-010
|
| 137
|
Rod 224
|
102,103
|
3.34e-010
|
| 138
|
Rod 225
|
62,102
|
120
|
| 139
|
Rod 226
|
66,104
|
84.6
|
| 140
|
Rod 227
|
104,105
|
136
|
| 141
|
Rod 230
|
100,102
|
84.5
|
| 142
|
Rod 231
|
102,104
|
166
|
| 143
|
Rod 238
|
106,54
|
20.9
|
| 144
|
Rod 239
|
107,52
|
58.3
|
| 145
|
Rod 243
|
108,107
|
30.2
|
| 146
|
Rod 245
|
109,106
|
28.8
|
| 147
|
Rod 246
|
110,49
|
75.4
|
| 148
|
Rod 247
|
111,50
|
84.4
|
| 149
|
Rod 248
|
108,112
|
120
|
| 150
|
Rod 249
|
110,111
|
107
|
| 151
|
Rod 250
|
111,113
|
111
|
| 152
|
Rod 251
|
112,110
|
122
|
| 153
|
Rod 252
|
113,109
|
21.6
|
| 154
|
Rod 253
|
108,48
|
203
|
| 155
|
Rod 254
|
109,51
|
58.5
|
| 156
|
Rod 255
|
114,86
|
195
|
| 157
|
Rod 256
|
115,85
|
109
|
| 158
|
Rod 257
|
49,116
|
201
|
| 159
|
Rod 258
|
116,114
|
198
|
| 160
|
Rod 259
|
50,117
|
111
|
| 161
|
Rod 260
|
117,115
|
110
|
Напряжение в стержне (макс.) [Н/мм^2] (Загружение 2)
| N
|
Название
|
Узлы
|
Экв. напряжение
|
| 0
|
Rod 0
|
0,6
|
2.88
|
| 1
|
Rod 4
|
5,48
|
153
|
| 2
|
Rod 5
|
6,2
|
27.8
|
| 3
|
Rod 6
|
7,1
|
2.92
|
| 4
|
Rod 7
|
8,7
|
36.8
|
| 5
|
Rod 8
|
9,8
|
136
|
| 6
|
Rod 9
|
2,10
|
22
|
| 7
|
Rod 10
|
10,3
|
55.5
|
| 8
|
Rod 11
|
4,11
|
89.3
|
| 9
|
Rod 12
|
11,53
|
108
|
| 10
|
Rod 14
|
12,13
|
2.88
|
| 11
|
Rod 16
|
16,49
|
220
|
| 12
|
Rod 17
|
13,18
|
31.7
|
| 13
|
Rod 18
|
19,20
|
2.92
|
| 14
|
Rod 19
|
21,19
|
12.7
|
| 15
|
Rod 20
|
17,21
|
162
|
| 16
|
Rod 21
|
18,22
|
23.5
|
| 17
|
Rod 22
|
22,14
|
61.9
|
| 18
|
Rod 23
|
15,23
|
117
|
| 19
|
Rod 24
|
23,72
|
107
|
| 20
|
Rod 26
|
24,25
|
2.88
|
| 21
|
Rod 28
|
28,51
|
55.3
|
| 22
|
Rod 29
|
25,30
|
28
|
| 23
|
Rod 30
|
31,32
|
2.92
|
| 24
|
Rod 31
|
33,31
|
16.9
|
| 25
|
Rod 32
|
29,33
|
99.3
|
| 26
|
Rod 33
|
30,34
|
22
|
| 27
|
Rod 34
|
34,26
|
55.1
|
| 28
|
Rod 35
|
27,35
|
65.4
|
| 29
|
Rod 36
|
35,55
|
62.8
|
| 30
|
Rod 37
|
36,37
|
2.88
|
| 31
|
Rod 39
|
40,50
|
124
|
| 32
|
Rod 40
|
37,42
|
31.9
|
| 33
|
Rod 41
|
43,44
|
2.92
|
| 34
|
Rod 42
|
45,43
|
5.16
|
| 35
|
Rod 43
|
41,45
|
136
|
| 36
|
Rod 44
|
42,46
|
23.5
|
| 37
|
Rod 45
|
46,38
|
61.5
|
| 38
|
Rod 46
|
39,47
|
109
|
| 39
|
Rod 47
|
47,73
|
121
|
| 40
|
Rod 48
|
25,37
|
10.6
|
| 41
|
Rod 50
|
6,13
|
10.5
|
| 42
|
Rod 51
|
31,43
|
25.3
|
| 43
|
Rod 52
|
19,7
|
18.3
|
| 44
|
Rod 57
|
48,87
|
185
|
| 45
|
Rod 60
|
51,84
|
85.4
|
| 46
|
Rod 61
|
33,45
|
28.3
|
| 47
|
Rod 62
|
21,8
|
71.1
|
| 48
|
Rod 64
|
29,41
|
72.7
|
| 49
|
Rod 65
|
9,17
|
58.2
|
| 50
|
Rod 85
|
53,5
|
83
|
| 51
|
Rod 90
|
55,28
|
40.2
|
| 52
|
Rod 98
|
13,57
|
4.21
|
| 53
|
Rod 99
|
57,37
|
4.28
|
| 54
|
Rod 100
|
41,58
|
39.4
|
| 55
|
Rod 101
|
58,17
|
40
|
| 56
|
Rod 102
|
45,59
|
37.5
|
| 57
|
Rod 103
|
59,21
|
102
|
| 58
|
Rod 104
|
43,60
|
12.4
|
| 59
|
Rod 105
|
60,19
|
12.6
|
| 60
|
Rod 110
|
61,70
|
134
|
| 61
|
Rod 111
|
62,61
|
108
|
| 62
|
Rod 117
|
50,63
|
116
|
| 63
|
Rod 118
|
63,56
|
78.6
|
| 64
|
Rod 119
|
56,64
|
80.2
|
| 65
|
Rod 120
|
64,49
|
110
|
| 66
|
Rod 125
|
65,71
|
132
|
| 67
|
Rod 126
|
66,65
|
106
|
| 68
|
Rod 127
|
67,69
|
136
|
| 69
|
Rod 128
|
68,67
|
118
|
| 70
|
Rod 129
|
68,62
|
130
|
| 71
|
Rod 130
|
66,62
|
121
|
| 72
|
Rod 131
|
69,49
|
201
|
| 73
|
Rod 132
|
70,56
|
126
|
| 74
|
Rod 133
|
71,50
|
193
|
| 75
|
Rod 134
|
69,70
|
146
|
| 76
|
Rod 135
|
71,70
|
135
|
| 77
|
Rod 136
|
72,16
|
104
|
| 78
|
Rod 137
|
73,40
|
122
|
| 79
|
Rod 138
|
55,73
|
119
|
| 80
|
Rod 139
|
53,72
|
156
|
| 81
|
Rod 140
|
73,72
|
163
|
| 82
|
Rod 146
|
54,88
|
56.4
|
| 83
|
Rod 147
|
76,29
|
60.4
|
| 84
|
Rod 148
|
75,89
|
98.5
|
| 85
|
Rod 149
|
77,41
|
92.7
|
| 86
|
Rod 150
|
74,90
|
111
|
| 87
|
Rod 151
|
78,17
|
92.8
|
| 88
|
Rod 152
|
52,91
|
141
|
| 89
|
Rod 153
|
79,9
|
78.8
|
| 90
|
Rod 165
|
27,39
|
128
|
| 91
|
Rod 166
|
4,15
|
128
|
| 92
|
Rod 167
|
39,15
|
105
|
| 93
|
Rod 168
|
76,77
|
96
|
| 94
|
Rod 169
|
79,78
|
94.1
|
| 95
|
Rod 170
|
77,78
|
114
|
| 96
|
Rod 171
|
84,54
|
87.2
|
| 97
|
Rod 172
|
85,75
|
144
|
| 98
|
Rod 173
|
86,74
|
162
|
| 99
|
Rod 174
|
87,52
|
186
|
| 100
|
Rod 175
|
84,85
|
88.9
|
| 101
|
Rod 176
|
87,86
|
140
|
| 102
|
Rod 177
|
85,86
|
206
|
| 103
|
Rod 178
|
88,76
|
71.3
|
| 104
|
Rod 179
|
89,77
|
111
|
| 105
|
Rod 180
|
90,78
|
107
|
| 106
|
Rod 181
|
91,79
|
101
|
| 107
|
Rod 185
|
80,92
|
59.8
|
| 108
|
Rod 186
|
92,27
|
56.7
|
| 109
|
Rod 187
|
81,93
|
130
|
| 110
|
Rod 188
|
93,39
|
114
|
| 111
|
Rod 189
|
82,94
|
139
|
| 112
|
Rod 190
|
94,15
|
120
|
| 113
|
Rod 191
|
83,95
|
130
|
| 114
|
Rod 192
|
95,4
|
103
|
| 115
|
Rod 193
|
92,93
|
123
|
| 116
|
Rod 194
|
94,95
|
119
|
| 117
|
Rod 195
|
93,94
|
98.8
|
| 118
|
Rod 196
|
35,47
|
123
|
| 119
|
Rod 197
|
11,23
|
125
|
| 120
|
Rod 198
|
47,23
|
114
|
| 121
|
Rod 202
|
80,81
|
116
|
| 122
|
Rod 203
|
83,82
|
117
|
| 123
|
Rod 204
|
81,82
|
112
|
| 124
|
Rod 205
|
26,96
|
76.6
|
| 125
|
Rod 206
|
96,80
|
55.6
|
| 126
|
Rod 207
|
38,97
|
168
|
| 127
|
Rod 208
|
97,81
|
157
|
| 128
|
Rod 209
|
14,98
|
179
|
| 129
|
Rod 210
|
98,82
|
170
|
| 130
|
Rod 211
|
3,99
|
187
|
| 131
|
Rod 212
|
99,83
|
146
|
| 132
|
Rod 213
|
96,97
|
121
|
| 133
|
Rod 214
|
99,98
|
119
|
| 134
|
Rod 215
|
97,98
|
141
|
| 135
|
Rod 222
|
68,100
|
83
|
| 136
|
Rod 223
|
100,101
|
7.53e-011
|
| 137
|
Rod 224
|
102,103
|
1.55e-010
|
| 138
|
Rod 225
|
62,102
|
120
|
| 139
|
Rod 226
|
66,104
|
84.5
|
| 140
|
Rod 227
|
104,105
|
136
|
| 141
|
Rod 230
|
100,102
|
84.4
|
| 142
|
Rod 231
|
102,104
|
166
|
| 143
|
Rod 238
|
106,54
|
18.8
|
| 144
|
Rod 239
|
107,52
|
69.7
|
| 145
|
Rod 243
|
108,107
|
36.5
|
| 146
|
Rod 245
|
109,106
|
16
|
| 147
|
Rod 246
|
110,49
|
74.5
|
| 148
|
Rod 247
|
111,50
|
86.7
|
| 149
|
Rod 248
|
108,112
|
120
|
| 150
|
Rod 249
|
110,111
|
106
|
| 151
|
Rod 250
|
111,113
|
109
|
| 152
|
Rod 251
|
112,110
|
122
|
| 153
|
Rod 252
|
113,109
|
22.2
|
| 154
|
Rod 253
|
108,48
|
197
|
| 155
|
Rod 254
|
109,51
|
49.7
|
| 156
|
Rod 255
|
114,86
|
197
|
| 157
|
Rod 256
|
115,85
|
110
|
| 158
|
Rod 257
|
49,116
|
204
|
| 159
|
Rod 258
|
116,114
|
201
|
| 160
|
Rod 259
|
50,117
|
112
|
| 161
|
Rod 260
|
117,115
|
111
|
Напряжение в стержне (макс.) [Н/мм^2] (Загружение 3)
| N
|
Название
|
Узлы
|
Экв. напряжение
|
| 0
|
Rod 0
|
0,6
|
2.88
|
| 1
|
Rod 4
|
5,48
|
143
|
| 2
|
Rod 5
|
6,2
|
23.4
|
| 3
|
Rod 6
|
7,1
|
2.92
|
| 4
|
Rod 7
|
8,7
|
16.8
|
| 5
|
Rod 8
|
9,8
|
45.2
|
| 6
|
Rod 9
|
2,10
|
18.3
|
| 7
|
Rod 10
|
10,3
|
46.1
|
| 8
|
Rod 11
|
4,11
|
69.4
|
| 9
|
Rod 12
|
11,53
|
99.6
|
| 10
|
Rod 14
|
12,13
|
2.88
|
| 11
|
Rod 16
|
16,49
|
203
|
| 12
|
Rod 17
|
13,18
|
26.5
|
| 13
|
Rod 18
|
19,20
|
2.92
|
| 14
|
Rod 19
|
21,19
|
11
|
| 15
|
Rod 20
|
17,21
|
19.9
|
| 16
|
Rod 21
|
18,22
|
19.6
|
| 17
|
Rod 22
|
22,14
|
51.3
|
| 18
|
Rod 23
|
15,23
|
89.6
|
| 19
|
Rod 24
|
23,72
|
98.4
|
| 20
|
Rod 26
|
24,25
|
2.88
|
| 21
|
Rod 28
|
28,51
|
60.1
|
| 22
|
Rod 29
|
25,30
|
23.6
|
| 23
|
Rod 30
|
31,32
|
2.92
|
| 24
|
Rod 31
|
33,31
|
7.89
|
| 25
|
Rod 32
|
29,33
|
19.4
|
| 26
|
Rod 33
|
30,34
|
18.3
|
| 27
|
Rod 34
|
34,26
|
45.9
|
| 28
|
Rod 35
|
27,35
|
57.1
|
| 29
|
Rod 36
|
35,55
|
54.1
|
| 30
|
Rod 37
|
36,37
|
2.88
|
| 31
|
Rod 39
|
40,50
|
109
|
| 32
|
Rod 40
|
37,42
|
26.6
|
| 33
|
Rod 41
|
43,44
|
2.92
|
| 34
|
Rod 42
|
45,43
|
15.4
|
| 35
|
Rod 43
|
41,45
|
25.2
|
| 36
|
Rod 44
|
42,46
|
19.6
|
| 37
|
Rod 45
|
46,38
|
51
|
| 38
|
Rod 46
|
39,47
|
95.9
|
| 39
|
Rod 47
|
47,73
|
112
|
| 40
|
Rod 48
|
25,37
|
9.52
|
| 41
|
Rod 50
|
6,13
|
9.49
|
| 42
|
Rod 51
|
31,43
|
9.44
|
| 43
|
Rod 52
|
19,7
|
9.07
|
| 44
|
Rod 57
|
48,87
|
167
|
| 45
|
Rod 60
|
51,84
|
87.2
|
| 46
|
Rod 61
|
33,45
|
18.4
|
| 47
|
Rod 62
|
21,8
|
17.5
|
| 48
|
Rod 64
|
29,41
|
39.2
|
| 49
|
Rod 65
|
9,17
|
79.4
|
| 50
|
Rod 85
|
53,5
|
74.3
|
| 51
|
Rod 90
|
55,28
|
29.7
|
| 52
|
Rod 98
|
13,57
|
4.07
|
| 53
|
Rod 99
|
57,37
|
4.13
|
| 54
|
Rod 100
|
41,58
|
20.7
|
| 55
|
Rod 101
|
58,17
|
84.4
|
| 56
|
Rod 102
|
45,59
|
12.3
|
| 57
|
Rod 103
|
59,21
|
12.5
|
| 58
|
Rod 104
|
43,60
|
5.59
|
| 59
|
Rod 105
|
60,19
|
5.59
|
| 60
|
Rod 110
|
61,70
|
134
|
| 61
|
Rod 111
|
62,61
|
108
|
| 62
|
Rod 117
|
50,63
|
96.3
|
| 63
|
Rod 118
|
63,56
|
77.7
|
| 64
|
Rod 119
|
56,64
|
79.7
|
| 65
|
Rod 120
|
64,49
|
89.5
|
| 66
|
Rod 125
|
65,71
|
131
|
| 67
|
Rod 126
|
66,65
|
105
|
| 68
|
Rod 127
|
67,69
|
136
|
| 69
|
Rod 128
|
68,67
|
118
|
| 70
|
Rod 129
|
68,62
|
130
|
| 71
|
Rod 130
|
66,62
|
120
|
| 72
|
Rod 131
|
69,49
|
196
|
| 73
|
Rod 132
|
70,56
|
126
|
| 74
|
Rod 133
|
71,50
|
188
|
| 75
|
Rod 134
|
69,70
|
143
|
| 76
|
Rod 135
|
71,70
|
132
|
| 77
|
Rod 136
|
72,16
|
89.6
|
| 78
|
Rod 137
|
73,40
|
107
|
| 79
|
Rod 138
|
55,73
|
97.8
|
| 80
|
Rod 139
|
53,72
|
131
|
| 81
|
Rod 140
|
73,72
|
149
|
| 82
|
Rod 146
|
54,88
|
74.1
|
| 83
|
Rod 147
|
76,29
|
86.9
|
| 84
|
Rod 148
|
75,89
|
101
|
| 85
|
Rod 149
|
77,41
|
153
|
| 86
|
Rod 150
|
74,90
|
113
|
| 87
|
Rod 151
|
78,17
|
175
|
| 88
|
Rod 152
|
52,91
|
135
|
| 89
|
Rod 153
|
79,9
|
145
|
| 90
|
Rod 165
|
27,39
|
104
|
| 91
|
Rod 166
|
4,15
|
104
|
| 92
|
Rod 167
|
39,15
|
91.7
|
| 93
|
Rod 168
|
76,77
|
135
|
| 94
|
Rod 169
|
79,78
|
133
|
| 95
|
Rod 170
|
77,78
|
141
|
| 96
|
Rod 171
|
84,54
|
120
|
| 97
|
Rod 172
|
85,75
|
169
|
| 98
|
Rod 173
|
86,74
|
187
|
| 99
|
Rod 174
|
87,52
|
198
|
| 100
|
Rod 175
|
84,85
|
122
|
| 101
|
Rod 176
|
87,86
|
159
|
| 102
|
Rod 177
|
85,86
|
217
|
| 103
|
Rod 178
|
88,76
|
88.1
|
| 104
|
Rod 179
|
89,77
|
125
|
| 105
|
Rod 180
|
90,78
|
130
|
| 106
|
Rod 181
|
91,79
|
83.7
|
| 107
|
Rod 185
|
80,92
|
53.3
|
| 108
|
Rod 186
|
92,27
|
50.6
|
| 109
|
Rod 187
|
81,93
|
98.7
|
| 110
|
Rod 188
|
93,39
|
86.9
|
| 111
|
Rod 189
|
82,94
|
105
|
| 112
|
Rod 190
|
94,15
|
91.4
|
| 113
|
Rod 191
|
83,95
|
94.6
|
| 114
|
Rod 192
|
95,4
|
72.8
|
| 115
|
Rod 193
|
92,93
|
101
|
| 116
|
Rod 194
|
94,95
|
97.5
|
| 117
|
Rod 195
|
93,94
|
85
|
| 118
|
Rod 196
|
35,47
|
98
|
| 119
|
Rod 197
|
11,23
|
103
|
| 120
|
Rod 198
|
47,23
|
100
|
| 121
|
Rod 202
|
80,81
|
95.5
|
| 122
|
Rod 203
|
83,82
|
96.6
|
| 123
|
Rod 204
|
81,82
|
94.1
|
| 124
|
Rod 205
|
26,96
|
64.7
|
| 125
|
Rod 206
|
96,80
|
48.7
|
| 126
|
Rod 207
|
38,97
|
129
|
| 127
|
Rod 208
|
97,81
|
120
|
| 128
|
Rod 209
|
14,98
|
138
|
| 129
|
Rod 210
|
98,82
|
130
|
| 130
|
Rod 211
|
3,99
|
140
|
| 131
|
Rod 212
|
99,83
|
106
|
| 132
|
Rod 213
|
96,97
|
100
|
| 133
|
Rod 214
|
99,98
|
98.2
|
| 134
|
Rod 215
|
97,98
|
117
|
| 135
|
Rod 222
|
68,100
|
83
|
| 136
|
Rod 223
|
100,101
|
1.51e-010
|
| 137
|
Rod 224
|
102,103
|
2.78e-010
|
| 138
|
Rod 225
|
62,102
|
120
|
| 139
|
Rod 226
|
66,104
|
84.5
|
| 140
|
Rod 227
|
104,105
|
136
|
| 141
|
Rod 230
|
100,102
|
84.4
|
| 142
|
Rod 231
|
102,104
|
165
|
| 143
|
Rod 238
|
106,54
|
27
|
| 144
|
Rod 239
|
107,52
|
66.1
|
| 145
|
Rod 243
|
108,107
|
42.7
|
| 146
|
Rod 245
|
109,106
|
15
|
| 147
|
Rod 246
|
110,49
|
69.7
|
| 148
|
Rod 247
|
111,50
|
85.5
|
| 149
|
Rod 248
|
108,112
|
117
|
| 150
|
Rod 249
|
110,111
|
109
|
| 151
|
Rod 250
|
111,113
|
113
|
| 152
|
Rod 251
|
112,110
|
118
|
| 153
|
Rod 252
|
113,109
|
18.6
|
| 154
|
Rod 253
|
108,48
|
194
|
| 155
|
Rod 254
|
109,51
|
59.4
|
| 156
|
Rod 255
|
114,86
|
192
|
| 157
|
Rod 256
|
115,85
|
103
|
| 158
|
Rod 257
|
49,116
|
200
|
| 159
|
Rod 258
|
116,114
|
196
|
| 160
|
Rod 259
|
50,117
|
106
|
| 161
|
Rod 260
|
117,115
|
104
|
Приложение В Перемещение в узлах стержней
Название документа: Рама платформы-19.FRM
Перемещения узлов (Загружение 1)
| N
|
Линейное перемещение [мм]
|
Угловое перемещение [градус]
|
| x
|
y
|
z
|
x
|
y
|
z
|
| 0
|
-0.208
|
-0.0107
|
-0.326
|
0.00937
|
0.00532
|
-0.00654
|
| 1
|
0.79
|
-0.306
|
6.69
|
0.212
|
0.0146
|
-0.0246
|
| 2
|
0.176
|
-0.00869
|
-0.052
|
0.00264
|
0.00438
|
-0.0342
|
| 3
|
0
|
0
|
0
|
0
|
0
|
0.127
|
| 4
|
-10
|
0.129
|
-16.3
|
-0.366
|
0.299
|
0.105
|
| 5
|
-15.2
|
0.0788
|
-31.8
|
-0.364
|
0.545
|
0.0958
|
| 6
|
0.00354
|
-0.0107
|
-0.0786
|
0.00423
|
0.00532
|
-0.00654
|
| 7
|
-0.00488
|
-0.306
|
-0.218
|
0.217
|
0.0146
|
-0.0246
|
| 8
|
-5.19
|
-0.278
|
-13.6
|
0.33
|
0.296
|
-0.0361
|
| 9
|
-10.4
|
-0.198
|
-29.6
|
0.298
|
0.551
|
-0.0275
|
| 10
|
0.9
|
-0.00413
|
-0.0139
|
0.00122
|
0.00214
|
-0.0167
|
| 11
|
-12.9
|
0.117
|
-24.1
|
-0.396
|
0.421
|
0.101
|
| 12
|
-0.0793
|
-0.00771
|
-0.129
|
0.00565
|
0.000837
|
-0.00248
|
| 13
|
0.000625
|
-0.00771
|
-0.00141
|
0.000516
|
0.000837
|
-0.00248
|
| 14
|
0
|
0
|
0
|
0
|
0
|
0.143
|
| 15
|
-10
|
0.202
|
-10.2
|
-0.233
|
0.307
|
0.0844
|
| 16
|
-15.2
|
0.146
|
-20.6
|
-0.263
|
0.689
|
0.107
|
| 17
|
-10.4
|
-0.0596
|
-18.5
|
0.196
|
0.553
|
-0.0186
|
| 18
|
0.168
|
-0.00627
|
-0.000283
|
-8.77e-005
|
0.000689
|
-0.0364
|
| 19
|
-0.000847
|
-0.0643
|
-0.0044
|
0.0253
|
0.00253
|
-0.02
|
| 20
|
0.645
|
-0.0643
|
0.703
|
0.0202
|
0.00253
|
-0.02
|
| 21
|
-5.19
|
-0.0702
|
-7.74
|
0.224
|
0.282
|
-0.022
|
| 22
|
0.984
|
-0.00297
|
-0.00187
|
5.95e-005
|
0.000336
|
-0.0203
|
| 23
|
-12.9
|
0.19
|
-15.3
|
-0.262
|
0.467
|
0.0801
|
| 24
|
-0.208
|
0.0107
|
-0.326
|
0.00937
|
-0.00532
|
-0.00654
|
| 25
|
0.00354
|
0.0107
|
-0.0786
|
0.00423
|
-0.00532
|
-0.00654
|
| 26
|
0
|
0
|
0
|
0
|
0
|
0.127
|
| 27
|
-10
|
-0.128
|
-1.49
|
-0.0332
|
0.343
|
0.105
|
| 28
|
-15.2
|
-0.0765
|
-2.96
|
-0.0406
|
0.633
|
0.0968
|
| 29
|
-10.4
|
0.201
|
-3.74
|
0.0688
|
0.557
|
-0.0277
|
| 30
|
0.176
|
0.00869
|
-0.052
|
0.00264
|
-0.00438
|
-0.0342
|
| 31
|
-0.00488
|
0.309
|
0.118
|
-0.0098
|
0.0082
|
-0.0248
|
| 32
|
0.795
|
0.309
|
-0.309
|
-0.0149
|
0.0082
|
-0.0248
|
| 33
|
-5.19
|
0.28
|
-0.523
|
0.0624
|
0.264
|
-0.0362
|
| 34
|
0.9
|
0.00413
|
-0.0139
|
0.00122
|
-0.00214
|
-0.0167
|
| 35
|
-12.9
|
-0.115
|
-2.19
|
-0.0369
|
0.5
|
0.101
|
| 36
|
-0.0793
|
0.00771
|
-0.129
|
0.00565
|
-0.000837
|
-0.00248
|
| 37
|
0.000625
|
0.00771
|
-0.00141
|
0.000516
|
-0.000837
|
-0.00248
|
| 38
|
0
|
0
|
0
|
0
|
0
|
0.143
|
| 39
|
-10
|
-0.203
|
-8.24
|
-0.187
|
0.318
|
0.0844
|
| 40
|
-15.2
|
-0.147
|
-16
|
-0.173
|
0.713
|
0.107
|
| 41
|
-10.4
|
0.0587
|
-14.9
|
0.18
|
0.554
|
-0.0186
|
| 42
|
0.168
|
0.00627
|
-0.000283
|
-8.77e-005
|
-0.000689
|
-0.0364
|
| 43
|
-0.000846
|
0.0643
|
0.00158
|
0.0116
|
0.00102
|
-0.02
|
| 44
|
0.645
|
0.0643
|
0.265
|
0.00643
|
0.00102
|
-0.02
|
| 45
|
-5.19
|
0.0698
|
-5.93
|
0.204
|
0.277
|
-0.022
|
| 46
|
0.984
|
0.00297
|
-0.00187
|
5.95e-005
|
-0.000336
|
-0.0203
|
| 47
|
-12.9
|
-0.191
|
-12.2
|
-0.2
|
0.486
|
0.0801
|
| 48
|
-16.4
|
0.0404
|
-35.8
|
-0.258
|
0.804
|
0.0692
|
| 49
|
-16.5
|
0.0953
|
-23.5
|
-0.167
|
0.868
|
0.0485
|
| 50
|
-16.5
|
-0.0975
|
-17.9
|
-0.139
|
0.871
|
0.0488
|
| 51
|
-16.4
|
-0.0376
|
-3.49
|
-0.0424
|
0.777
|
0.0684
|
| 52
|
-16.2
|
-0.00887
|
-38.6
|
-0.0985
|
0.687
|
-0.0747
|
| 53
|
-14.9
|
0.087
|
-30.7
|
-0.374
|
0.487
|
0.0809
|
| 54
|
-16.2
|
0.0123
|
-4.16
|
-0.0401
|
0.737
|
-0.0749
|
| 55
|
-14.9
|
-0.0848
|
-2.84
|
-0.0403
|
0.6
|
0.0815
|
| 56
|
-16.5
|
-0.000822
|
-20.7
|
-0.153
|
0.867
|
0.0204
|
| 57
|
0
|
0
|
0
|
0
|
0
|
-0.00234
|
| 58
|
-10.4
|
-0.00044
|
-16.7
|
0.188
|
0.553
|
-0.0182
|
| 59
|
-5.19
|
-0.000179
|
-6.83
|
0.214
|
0.28
|
-0.0215
|
| 60
|
0
|
0
|
0
|
0
|
0
|
-0.0199
|
| 61
|
-21.3
|
-0.804
|
-20.7
|
-0.153
|
0.933
|
0.0204
|
| 62
|
-24.6
|
-1.34
|
-20.7
|
-0.153
|
0.924
|
0.0209
|
| 63
|
-16.5
|
-0.0377
|
-19.3
|
-0.146
|
0.852
|
0.0276
|
| 64
|
-16.5
|
0.0359
|
-22.1
|
-0.16
|
0.85
|
0.0274
|
| 65
|
-21.3
|
-0.873
|
-17.8
|
-0.152
|
0.933
|
0.024
|
| 66
|
-24.6
|
-1.41
|
-17.8
|
-0.153
|
0.935
|
0.0215
|
| 67
|
-21.3
|
-0.735
|
-23.6
|
-0.154
|
0.935
|
0.024
|
| 68
|
-24.6
|
-1.27
|
-23.6
|
-0.153
|
0.929
|
0.0215
|
| 69
|
-20.5
|
-0.6
|
-23.6
|
-0.155
|
0.915
|
0.0246
|
| 70
|
-20.5
|
-0.67
|
-20.7
|
-0.153
|
0.903
|
0.0203
|
| 71
|
-20.5
|
-0.74
|
-17.8
|
-0.152
|
0.915
|
0.0247
|
| 72
|
-14.9
|
0.156
|
-19.8
|
-0.267
|
0.649
|
0.0707
|
| 73
|
-14.9
|
-0.158
|
-15.4
|
-0.18
|
0.677
|
0.0705
|
| 74
|
-16.2
|
0.0447
|
-25.1
|
-0.0483
|
0.79
|
-0.0899
|
| 75
|
-16.2
|
-0.0466
|
-19.6
|
-0.0662
|
0.819
|
-0.0898
|
| 76
|
-12.8
|
0.116
|
-4.86
|
0.00343
|
0.72
|
-0.0673
|
| 77
|
-12.8
|
0.0332
|
-19.3
|
0.0801
|
0.702
|
-0.028
|
| 78
|
-12.8
|
-0.0345
|
-23.8
|
0.115
|
0.689
|
-0.0279
|
| 79
|
-12.8
|
-0.113
|
-37.3
|
0.158
|
0.666
|
-0.0673
|
| 80
|
-5.15
|
-0.0961
|
-0.441
|
-0.0223
|
0.0993
|
0.0966
|
| 81
|
-5.15
|
-0.162
|
-2.4
|
-0.122
|
0.0936
|
0.0758
|
| 82
|
-5.15
|
0.161
|
-3
|
-0.151
|
0.0913
|
0.0758
|
| 83
|
-5.15
|
0.0968
|
-4.82
|
-0.242
|
0.0899
|
0.0966
|
| 84
|
-16.6
|
-0.0215
|
-3.71
|
-0.0433
|
0.683
|
0.0126
|
| 85
|
-16.7
|
-0.0725
|
-18.6
|
-0.121
|
0.857
|
0.00573
|
| 86
|
-16.7
|
0.0704
|
-24.2
|
-0.119
|
0.823
|
0.00541
|
| 87
|
-16.6
|
0.0245
|
-37
|
-0.203
|
0.549
|
0.0137
|
| 88
|
-15.1
|
0.0473
|
-4.54
|
-0.0301
|
0.731
|
-0.119
|
| 89
|
-14.9
|
-0.0197
|
-20
|
-0.0125
|
0.779
|
-0.129
|
| 90
|
-14.9
|
0.0179
|
-25.2
|
0.0167
|
0.756
|
-0.129
|
| 91
|
-15.1
|
-0.044
|
-39.1
|
0.000128
|
0.68
|
-0.119
|
| 92
|
-7.54
|
-0.12
|
-0.914
|
-0.0291
|
0.209
|
0.101
|
| 93
|
-7.54
|
-0.193
|
-5.02
|
-0.162
|
0.194
|
0.0812
|
| 94
|
-7.54
|
0.192
|
-6.25
|
-0.201
|
0.188
|
0.0812
|
| 95
|
-7.54
|
0.121
|
-10
|
-0.319
|
0.185
|
0.101
|
| 96
|
-2.8
|
-0.056
|
-0.119
|
-
|
-
|
-
|
| 97
|
-2.8
|
-0.102
|
-0.643
|
-
|
-
|
-
|
| 98
|
-2.8
|
0.102
|
-0.805
|
-
|
-
|
-
|
| 99
|
-2.8
|
0.0563
|
-1.3
|
-
|
-
|
-
|
| 100
|
-27.9
|
-1.81
|
-23.6
|
-
|
-
|
-
|
| 101
|
-28.7
|
-1.94
|
-23.6
|
-
|
-
|
-
|
| 102
|
-27.9
|
-1.87
|
-20.7
|
-
|
-
|
-
|
| 103
|
-28.7
|
-2.01
|
-20.7
|
-
|
-
|
-
|
| 104
|
-27.9
|
-1.94
|
-17.7
|
-
|
-
|
-
|
| 105
|
-28.8
|
-2.08
|
-17.7
|
-
|
-
|
-
|
| 106
|
-5.89
|
0.829
|
-4.16
|
-
|
-
|
-
|
| 107
|
-6.46
|
2.69
|
-38.6
|
-
|
-
|
-
|
| 108
|
-5.27
|
2.69
|
-36
|
-
|
-
|
-
|
| 109
|
-5.27
|
0.831
|
-3.51
|
-
|
-
|
-
|
| 110
|
-5.27
|
2.02
|
-23.4
|
-
|
-
|
-
|
| 111
|
-5.27
|
1.75
|
-18.1
|
-
|
-
|
-
|
| 112
|
-5.27
|
2.28
|
-28.8
|
-
|
-
|
-
|
| 113
|
-5.27
|
1.43
|
-12.8
|
-
|
-
|
-
|
| 114
|
-16.6
|
0.0936
|
-23.5
|
-
|
-
|
-
|
| 115
|
-16.5
|
-0.0958
|
-18
|
-
|
-
|
-
|
| 116
|
-16.5
|
0.0945
|
-23.5
|
-
|
-
|
-
|
| 117
|
-16.5
|
-0.0967
|
-18
|
-
|
-
|
-
|
Перемещения узлов (Загружение
2
)
| N
|
Линейное перемещение [мм]
|
Угловое перемещение [градус]
|
| x
|
y
|
z
|
x
|
y
|
z
|
| 0
|
-0.188
|
-0.00969
|
-0.326
|
0.00937
|
0.00532
|
-0.00592
|
| 1
|
0.977
|
-0.221
|
5.68
|
0.0473
|
-0.147
|
-0.00788
|
| 2
|
0.16
|
-0.00788
|
-0.052
|
0.00264
|
0.00438
|
-0.031
|
| 3
|
0
|
0
|
0
|
0
|
0
|
0.115
|
| 4
|
-9.04
|
0.107
|
-13
|
-0.286
|
0.25
|
0.0948
|
| 5
|
-13.7
|
0.0569
|
-24.6
|
-0.247
|
0.439
|
0.0824
|
| 6
|
0.00321
|
-0.00969
|
-0.0786
|
0.00423
|
0.00532
|
-0.00592
|
| 7
|
0.722
|
-0.221
|
4.1
|
0.0525
|
-0.147
|
-0.00788
|
| 8
|
-0.00647
|
-0.219
|
-0.524
|
0.165
|
0.0356
|
-0.0247
|
| 9
|
-6.31
|
-0.181
|
-12.8
|
0.306
|
0.286
|
-0.0328
|
| 10
|
0.815
|
-0.00374
|
-0.0139
|
0.00122
|
0.00214
|
-0.0151
|
| 11
|
-11.6
|
0.0941
|
-19
|
-0.298
|
0.347
|
0.0902
|
| 12
|
-0.0719
|
-0.00699
|
-0.129
|
0.00565
|
0.000837
|
-0.00224
|
| 13
|
0.000566
|
-0.00699
|
-0.00141
|
0.000516
|
0.000837
|
-0.00224
|
| 14
|
0
|
0
|
0
|
0
|
0
|
0.13
|
| 15
|
-9.04
|
0.177
|
-7.93
|
-0.177
|
0.259
|
0.0753
|
| 16
|
-13.7
|
0.116
|
-15.5
|
-0.182
|
0.583
|
0.0919
|
| 17
|
-6.32
|
-0.0675
|
-7.09
|
0.2
|
0.279
|
-0.0212
|
| 18
|
0.152
|
-0.00568
|
-0.000283
|
-8.77e-005
|
0.000689
|
-0.0329
|
| 19
|
0.722
|
-0.0393
|
1.17
|
0.0121
|
-0.142
|
-0.0121
|
| 20
|
1.11
|
-0.0393
|
1.45
|
0.00699
|
-0.142
|
-0.0121
|
| 21
|
-0.0011
|
-0.0544
|
-0.00933
|
0.0241
|
0.00554
|
-0.017
|
| 22
|
0.892
|
-0.0027
|
-0.00187
|
5.95e-005
|
0.000336
|
-0.0184
|
| 23
|
-11.6
|
0.163
|
-11.7
|
-0.193
|
0.393
|
0.0705
|
| 24
|
-0.188
|
0.00969
|
-0.326
|
0.00937
|
-0.00532
|
-0.00592
|
| 25
|
0.00321
|
0.00969
|
-0.0786
|
0.00423
|
-0.00532
|
-0.00592
|
| 26
|
0
|
0
|
0
|
0
|
0
|
0.115
|
| 27
|
-9.04
|
-0.106
|
-0.436
|
-0.00758
|
0.295
|
0.0948
|
| 28
|
-13.7
|
-0.0544
|
-0.654
|
-0.00418
|
0.528
|
0.0834
|
| 29
|
-6.31
|
0.184
|
0.188
|
0.0348
|
0.27
|
-0.0329
|
| 30
|
0.16
|
0.00788
|
-0.052
|
0.00264
|
-0.00438
|
-0.031
|
| 31
|
0.722
|
0.224
|
-2.51
|
-0.0521
|
-0.136
|
-0.00803
|
| 32
|
0.982
|
0.224
|
-4.31
|
-0.0572
|
-0.136
|
-0.00803
|
| 33
|
-0.00647
|
0.221
|
-0.069
|
-0.0341
|
-0.00457
|
-0.0248
|
| 34
|
0.815
|
0.00374
|
-0.0139
|
0.00122
|
-0.00214
|
-0.0151
|
| 35
|
-11.6
|
-0.0921
|
-0.564
|
-0.00568
|
0.426
|
0.0901
|
| 36
|
-0.0719
|
0.00699
|
-0.129
|
0.00565
|
-0.000837
|
-0.00224
|
| 37
|
0.000566
|
0.00699
|
-0.00141
|
0.000516
|
-0.000837
|
-0.00224
|
| 38
|
0
|
0
|
0
|
0
|
0
|
0.13
|
| 39
|
-9.04
|
-0.178
|
-6.22
|
-0.138
|
0.27
|
0.0752
|
| 40
|
-13.7
|
-0.117
|
-11.6
|
-0.103
|
0.607
|
0.0916
|
| 41
|
-6.32
|
0.0668
|
-5.3
|
0.181
|
0.277
|
-0.0212
|
| 42
|
0.152
|
0.00568
|
-0.000283
|
-8.77e-005
|
-0.000689
|
-0.0329
|
| 43
|
0.722
|
0.0395
|
0.259
|
0.00577
|
-0.14
|
-0.0122
|
| 44
|
1.11
|
0.0395
|
0.334
|
0.000632
|
-0.14
|
-0.0122
|
| 45
|
-0.0011
|
0.0544
|
-0.00152
|
0.0095
|
-0.000857
|
-0.017
|
| 46
|
0.892
|
0.0027
|
-0.00187
|
5.95e-005
|
-0.000336
|
-0.0184
|
| 47
|
-11.6
|
-0.164
|
-9.07
|
-0.141
|
0.412
|
0.0705
|
| 48
|
-14.6
|
0.0209
|
-27
|
-0.128
|
0.675
|
0.0512
|
| 49
|
-14.8
|
0.0633
|
-17.3
|
-0.079
|
0.738
|
0.0333
|
| 50
|
-14.8
|
-0.0655
|
-12.6
|
-0.0629
|
0.742
|
0.0337
|
| 51
|
-14.6
|
-0.0179
|
-0.704
|
-0.00402
|
0.648
|
0.0504
|
| 52
|
-14.1
|
-0.0232
|
-27.7
|
0.0362
|
0.544
|
-0.112
|
| 53
|
-13.4
|
0.0646
|
-23.8
|
-0.259
|
0.385
|
0.0707
|
| 54
|
-14.1
|
0.0269
|
-0.781
|
-0.00462
|
0.597
|
-0.112
|
| 55
|
-13.4
|
-0.0623
|
-0.641
|
-0.00436
|
0.501
|
0.0712
|
| 56
|
-14.8
|
-0.000812
|
-14.9
|
-0.071
|
0.737
|
0.0132
|
| 57
|
0
|
0
|
0
|
0
|
0
|
-0.00212
|
| 58
|
-6.32
|
-0.000324
|
-6.2
|
0.19
|
0.278
|
-0.0206
|
| 59
|
0
|
0
|
0
|
0
|
0
|
-0.0168
|
| 60
|
0.722
|
5.72e-005
|
0.713
|
0.00894
|
-0.141
|
-0.0122
|
| 61
|
-18.9
|
-0.372
|
-14.9
|
-0.071
|
0.803
|
0.0146
|
| 62
|
-21.7
|
-0.62
|
-14.9
|
-0.071
|
0.794
|
0.0152
|
| 63
|
-14.8
|
-0.0249
|
-13.8
|
-0.0669
|
0.722
|
0.0183
|
| 64
|
-14.8
|
0.0231
|
-16.1
|
-0.075
|
0.721
|
0.0182
|
| 65
|
-18.9
|
-0.422
|
-12.5
|
-0.0706
|
0.804
|
0.0172
|
| 66
|
-21.7
|
-0.67
|
-12.4
|
-0.071
|
0.805
|
0.0156
|
| 67
|
-18.9
|
-0.323
|
-17.4
|
-0.0712
|
0.806
|
0.0171
|
| 68
|
-21.7
|
-0.571
|
-17.4
|
-0.0709
|
0.8
|
0.0156
|
| 69
|
-18.2
|
-0.26
|
-17.4
|
-0.0714
|
0.786
|
0.0175
|
| 70
|
-18.2
|
-0.311
|
-14.9
|
-0.071
|
0.773
|
0.0145
|
| 71
|
-18.2
|
-0.361
|
-12.5
|
-0.0704
|
0.786
|
0.0176
|
| 72
|
-13.4
|
0.127
|
-15
|
-0.187
|
0.548
|
0.0603
|
| 73
|
-13.4
|
-0.129
|
-11.2
|
-0.111
|
0.576
|
0.0601
|
| 74
|
-14
|
0.0151
|
-17.5
|
0.0415
|
0.627
|
-0.129
|
| 75
|
-14
|
-0.017
|
-13
|
0.01
|
0.658
|
-0.129
|
| 76
|
-9.45
|
0.118
|
-0.649
|
0.0165
|
0.499
|
-0.0867
|
| 77
|
-9.44
|
0.0569
|
-10.5
|
0.133
|
0.474
|
-0.0394
|
| 78
|
-9.44
|
-0.0581
|
-13.6
|
0.18
|
0.458
|
-0.0393
|
| 79
|
-9.45
|
-0.115
|
-22.4
|
0.259
|
0.432
|
-0.0867
|
| 80
|
-4.66
|
-0.0821
|
-0.151
|
-0.00718
|
0.0859
|
0.0872
|
| 81
|
-4.66
|
-0.145
|
-1.84
|
-0.0927
|
0.0803
|
0.0682
|
| 82
|
-4.66
|
0.144
|
-2.35
|
-0.118
|
0.078
|
0.0682
|
| 83
|
-4.66
|
0.0829
|
-3.9
|
-0.195
|
0.0766
|
0.0872
|
| 84
|
-14.8
|
-0.00285
|
-0.727
|
-0.00498
|
0.547
|
-0.00337
|
| 85
|
-14.8
|
-0.041
|
-12.9
|
-0.0434
|
0.718
|
-0.00631
|
| 86
|
-14.8
|
0.0389
|
-17.5
|
-0.0293
|
0.682
|
-0.00662
|
| 87
|
-14.8
|
0.00605
|
-27.5
|
-0.07
|
0.406
|
-0.00231
|
| 88
|
-12.6
|
0.0578
|
-0.81
|
-6.43e-005
|
0.564
|
-0.165
|
| 89
|
-12.3
|
0.00797
|
-12.7
|
0.0591
|
0.596
|
-0.177
|
| 90
|
-12.3
|
-0.00962
|
-16.7
|
0.102
|
0.57
|
-0.177
|
| 91
|
-12.6
|
-0.0542
|
-26.7
|
0.13
|
0.506
|
-0.165
|
| 92
|
-6.82
|
-0.102
|
-0.292
|
-0.00811
|
0.18
|
0.0906
|
| 93
|
-6.82
|
-0.171
|
-3.82
|
-0.122
|
0.166
|
0.0728
|
| 94
|
-6.82
|
0.17
|
-4.87
|
-0.154
|
0.16
|
0.0728
|
| 95
|
-6.82
|
0.103
|
-8.05
|
-0.253
|
0.157
|
0.0906
|
| 96
|
-2.53
|
-0.0482
|
-0.0428
|
-
|
-
|
-
|
| 97
|
-2.54
|
-0.0915
|
-0.496
|
-
|
-
|
-
|
| 98
|
-2.54
|
0.0913
|
-0.635
|
-
|
-
|
-
|
| 99
|
-2.53
|
0.0486
|
-1.06
|
-
|
-
|
-
|
| 100
|
-24.5
|
-0.818
|
-17.5
|
-
|
-
|
-
|
| 101
|
-25.2
|
-0.88
|
-17.5
|
-
|
-
|
-
|
| 102
|
-24.5
|
-0.868
|
-14.9
|
-
|
-
|
-
|
| 103
|
-25.2
|
-0.93
|
-14.9
|
-
|
-
|
-
|
| 104
|
-24.6
|
-0.918
|
-12.4
|
-
|
-
|
-
|
| 105
|
-25.3
|
-0.98
|
-12.4
|
-
|
-
|
-
|
| 106
|
-5.59
|
0.227
|
-0.783
|
-
|
-
|
-
|
| 107
|
-6.19
|
0.977
|
-27.7
|
-
|
-
|
-
|
| 108
|
-5.3
|
0.984
|
-27.1
|
-
|
-
|
-
|
| 109
|
-5.3
|
0.229
|
-0.723
|
-
|
-
|
-
|
| 110
|
-5.3
|
0.792
|
-17.2
|
-
|
-
|
-
|
| 111
|
-5.3
|
0.681
|
-12.8
|
-
|
-
|
-
|
| 112
|
-5.3
|
0.878
|
-21.7
|
-
|
-
|
-
|
| 113
|
-5.3
|
0.529
|
-8.42
|
-
|
-
|
-
|
| 114
|
-14.8
|
0.0617
|
-17.3
|
-
|
-
|
-
|
| 115
|
-14.8
|
-0.0639
|
-12.6
|
-
|
-
|
-
|
| 116
|
-14.8
|
0.0625
|
-17.3
|
-
|
-
|
-
|
| 117
|
-14.8
|
-0.0647
|
-12.6
|
-
|
-
|
-
|
Перемещения узлов (Загружение
3
)
| N
|
Линейное перемещение [мм]
|
Угловое перемещение [градус]
|
| x
|
y
|
z
|
x
|
y
|
z
|
| 0
|
-0.156
|
-0.00803
|
-0.326
|
0.00937
|
0.00532
|
-0.0049
|
| 1
|
1.03
|
-0.132
|
-3.02
|
-0.0811
|
-0.203
|
-0.00527
|
| 2
|
0.132
|
-0.00652
|
-0.052
|
0.00264
|
0.00438
|
-0.0257
|
| 3
|
0
|
0
|
0
|
0
|
0
|
0.0956
|
| 4
|
-7.45
|
0.0801
|
-8.81
|
-0.187
|
0.185
|
0.0775
|
| 5
|
-11.2
|
0.0344
|
-15.7
|
-0.12
|
0.304
|
0.0613
|
| 6
|
0.00266
|
-0.00803
|
-0.0786
|
0.00423
|
0.00532
|
-0.0049
|
| 7
|
0.856
|
-0.132
|
-0.455
|
-0.0759
|
-0.203
|
-0.00527
|
| 8
|
0.565
|
-0.131
|
1.96
|
-0.0188
|
-0.139
|
-0.0044
|
| 9
|
-0.00748
|
-0.126
|
-0.745
|
0.153
|
0.0506
|
-0.0175
|
| 10
|
0.675
|
-0.00309
|
-0.0139
|
0.00122
|
0.00214
|
-0.0125
|
| 11
|
-9.55
|
0.0668
|
-12.6
|
-0.181
|
0.249
|
0.073
|
| 12
|
-0.0596
|
-0.00579
|
-0.129
|
0.00565
|
0.000837
|
-0.00186
|
| 13
|
0.000469
|
-0.00579
|
-0.00141
|
0.000516
|
0.000837
|
-0.00186
|
| 14
|
0
|
0
|
0
|
0
|
0
|
0.107
|
| 15
|
-7.45
|
0.139
|
-5.02
|
-0.108
|
0.194
|
0.0606
|
| 16
|
-11.2
|
0.0706
|
-9.34
|
-0.0914
|
0.443
|
0.0679
|
| 17
|
-0.00153
|
-0.0574
|
-0.0131
|
0.0187
|
0.0078
|
-0.0179
|
| 18
|
0.126
|
-0.00471
|
-0.000283
|
-8.77e-005
|
0.000689
|
-0.0273
|
| 19
|
0.856
|
-0.0209
|
-4.54
|
-0.097
|
-0.203
|
-0.00649
|
| 20
|
1.07
|
-0.0209
|
-7.79
|
-0.102
|
-0.203
|
-0.00649
|
| 21
|
0.565
|
-0.0278
|
-0.835
|
-0.0581
|
-0.137
|
-0.00856
|
| 22
|
0.739
|
-0.00223
|
-0.00187
|
5.95e-005
|
0.000336
|
-0.0153
|
| 23
|
-9.55
|
0.121
|
-7.25
|
-0.112
|
0.293
|
0.0553
|
| 24
|
-0.156
|
0.00803
|
-0.326
|
0.00937
|
-0.00532
|
-0.0049
|
| 25
|
0.00266
|
0.00803
|
-0.0786
|
0.00423
|
-0.00532
|
-0.0049
|
| 26
|
0
|
0
|
0
|
0
|
0
|
0.0956
|
| 27
|
-7.45
|
-0.0792
|
0.74
|
0.0194
|
0.23
|
0.0775
|
| 28
|
-11.2
|
-0.0329
|
1.68
|
0.0232
|
0.384
|
0.0622
|
| 29
|
-0.00747
|
0.128
|
-0.115
|
-0.0608
|
-0.00761
|
-0.0176
|
| 30
|
0.132
|
0.00652
|
-0.052
|
0.00264
|
-0.00438
|
-0.0257
|
| 31
|
0.856
|
0.134
|
-9.94
|
-0.122
|
-0.203
|
-0.00536
|
| 32
|
1.03
|
0.134
|
-14
|
-0.127
|
-0.203
|
-0.00536
|
| 33
|
0.565
|
0.133
|
-4.42
|
-0.107
|
-0.133
|
-0.00448
|
| 34
|
0.675
|
0.00309
|
-0.0139
|
0.00122
|
-0.00214
|
-0.0125
|
| 35
|
-9.55
|
-0.0657
|
1.19
|
0.024
|
0.325
|
0.0729
|
| 36
|
-0.0596
|
0.00579
|
-0.129
|
0.00565
|
-0.000837
|
-0.00186
|
| 37
|
0.000469
|
0.00579
|
-0.00141
|
0.000516
|
-0.000837
|
-0.00186
|
| 38
|
0
|
0
|
0
|
0
|
0
|
0.107
|
| 39
|
-7.45
|
-0.139
|
-3.74
|
-0.0791
|
0.205
|
0.0606
|
| 40
|
-11.2
|
-0.0714
|
-6.31
|
-0.0266
|
0.465
|
0.0676
|
| 41
|
-0.00153
|
0.0574
|
-0.00255
|
0.00472
|
-0.00143
|
-0.0179
|
| 42
|
0.126
|
0.00471
|
-0.000283
|
-8.77e-005
|
-0.000689
|
-0.0273
|
| 43
|
0.856
|
0.0212
|
-5.85
|
-0.0999
|
-0.203
|
-0.0065
|
| 44
|
1.07
|
0.0212
|
-9.19
|
-0.105
|
-0.203
|
-0.0065
|
| 45
|
0.565
|
0.028
|
-1.71
|
-0.0646
|
-0.136
|
-0.00857
|
| 46
|
0.739
|
0.00223
|
-0.00187
|
5.95e-005
|
-0.000336
|
-0.0153
|
| 47
|
-9.55
|
-0.121
|
-5.28
|
-0.0714
|
0.312
|
0.0554
|
| 48
|
-11.8
|
0.00413
|
-16.5
|
-0.00323
|
0.509
|
0.0227
|
| 49
|
-11.9
|
0.0169
|
-9.96
|
0.0101
|
0.57
|
0.00988
|
| 50
|
-11.9
|
-0.018
|
-6.35
|
0.0125
|
0.573
|
0.0102
|
| 51
|
-11.8
|
-0.00241
|
1.92
|
0.014
|
0.48
|
0.022
|
| 52
|
-10.7
|
-0.0294
|
-15.3
|
0.14
|
0.37
|
-0.171
|
| 53
|
-11
|
0.0409
|
-15.3
|
-0.132
|
0.258
|
0.0546
|
| 54
|
-10.7
|
0.0317
|
2
|
-0.00451
|
0.403
|
-0.171
|
| 55
|
-11
|
-0.0395
|
1.61
|
0.0239
|
0.362
|
0.0551
|
| 56
|
-11.9
|
-0.00025
|
-8.16
|
0.0112
|
0.569
|
0.00316
|
| 57
|
0
|
0
|
0
|
0
|
0
|
-0.00176
|
| 58
|
0
|
0
|
0
|
0
|
0
|
-0.0177
|
| 59
|
0.565
|
7.85e-005
|
-1.28
|
-0.0614
|
-0.136
|
-0.00869
|
| 60
|
0.856
|
0.000113
|
-5.2
|
-0.0985
|
-0.203
|
-0.00653
|
| 61
|
-15.1
|
0.0586
|
-8.16
|
0.0112
|
0.635
|
0.00473
|
| 62
|
-17.4
|
0.0978
|
-8.16
|
0.0113
|
0.626
|
0.0051
|
| 63
|
-11.9
|
-0.00627
|
-7.25
|
0.0119
|
0.554
|
0.00489
|
| 64
|
-11.9
|
0.00563
|
-9.06
|
0.0106
|
0.552
|
0.00472
|
| 65
|
-15.1
|
0.0422
|
-6.23
|
0.0111
|
0.635
|
0.00557
|
| 66
|
-17.4
|
0.0812
|
-6.18
|
0.0112
|
0.637
|
0.00523
|
| 67
|
-15.1
|
0.0747
|
-10.1
|
0.0114
|
0.637
|
0.00549
|
| 68
|
-17.4
|
0.114
|
-10.1
|
0.0113
|
0.631
|
0.0052
|
| 69
|
-14.6
|
0.0648
|
-10.1
|
0.0114
|
0.617
|
0.00556
|
| 70
|
-14.6
|
0.0487
|
-8.16
|
0.0112
|
0.605
|
0.00464
|
| 71
|
-14.6
|
0.0325
|
-6.24
|
0.0111
|
0.617
|
0.00566
|
| 72
|
-11
|
0.0821
|
-9.06
|
-0.0969
|
0.415
|
0.0441
|
| 73
|
-11
|
-0.083
|
-6.21
|
-0.0348
|
0.44
|
0.0439
|
| 74
|
-10.6
|
-0.0247
|
-8.84
|
0.117
|
0.434
|
-0.192
|
| 75
|
-10.6
|
0.0239
|
-5.71
|
0.0711
|
0.451
|
-0.192
|
| 76
|
-4.01
|
0.0981
|
1.39
|
-0.0309
|
0.179
|
-0.118
|
| 77
|
-4.01
|
0.0815
|
-2.35
|
0.114
|
0.198
|
-0.0537
|
| 78
|
-4.01
|
-0.0819
|
-3.67
|
0.171
|
0.21
|
-0.0536
|
| 79
|
-4.01
|
-0.0961
|
-8.15
|
0.265
|
0.228
|
-0.118
|
| 80
|
-3.85
|
-0.0636
|
0.188
|
0.0102
|
0.0679
|
0.0719
|
| 81
|
-3.85
|
-0.117
|
-1.14
|
-0.0566
|
0.062
|
0.0559
|
| 82
|
-3.85
|
0.117
|
-1.53
|
-0.0758
|
0.0595
|
0.0559
|
| 83
|
-3.85
|
0.064
|
-2.7
|
-0.134
|
0.0576
|
0.0719
|
| 84
|
-11.8
|
0.0102
|
1.98
|
0.0081
|
0.349
|
-0.0285
|
| 85
|
-11.8
|
0.00515
|
-6.25
|
0.0288
|
0.534
|
-0.0246
|
| 86
|
-11.8
|
-0.00613
|
-9.77
|
0.0569
|
0.507
|
-0.025
|
| 87
|
-11.8
|
-0.00826
|
-16.4
|
0.0491
|
0.243
|
-0.0275
|
| 88
|
-8.38
|
0.0541
|
1.89
|
-0.015
|
0.328
|
-0.237
|
| 89
|
-8.08
|
0.0433
|
-4.76
|
0.101
|
0.366
|
-0.256
|
| 90
|
-8.08
|
-0.044
|
-7.33
|
0.157
|
0.358
|
-0.256
|
| 91
|
-8.39
|
-0.052
|
-13.4
|
0.21
|
0.322
|
-0.237
|
| 92
|
-5.63
|
-0.0776
|
0.422
|
0.0151
|
0.142
|
0.0744
|
| 93
|
-5.63
|
-0.137
|
-2.33
|
-0.0723
|
0.127
|
0.0592
|
| 94
|
-5.63
|
0.136
|
-3.13
|
-0.0968
|
0.121
|
0.0593
|
| 95
|
-5.63
|
0.0783
|
-5.51
|
-0.17
|
0.117
|
0.0744
|
| 96
|
-2.1
|
-0.0377
|
0.0476
|
-
|
-
|
-
|
| 97
|
-2.1
|
-0.0744
|
-0.31
|
-
|
-
|
-
|
| 98
|
-2.1
|
0.0743
|
-0.418
|
-
|
-
|
-
|
| 99
|
-2.1
|
0.0379
|
-0.74
|
-
|
-
|
-
|
| 100
|
-19.6
|
0.154
|
-10.1
|
-
|
-
|
-
|
| 101
|
-20.2
|
0.164
|
-10.1
|
-
|
-
|
-
|
| 102
|
-19.6
|
0.137
|
-8.17
|
-
|
-
|
-
|
| 103
|
-20.2
|
0.147
|
-8.17
|
-
|
-
|
-
|
| 104
|
-19.7
|
0.12
|
-6.15
|
-
|
-
|
-
|
| 105
|
-20.3
|
0.13
|
-6.15
|
-
|
-
|
-
|
| 106
|
-4.67
|
-0.116
|
2
|
-
|
-
|
-
|
| 107
|
-5.14
|
-0.628
|
-15.3
|
-
|
-
|
-
|
| 108
|
-4.77
|
-0.621
|
-16.6
|
-
|
-
|
-
|
| 109
|
-4.77
|
-0.117
|
1.9
|
-
|
-
|
-
|
| 110
|
-4.76
|
-0.335
|
-9.87
|
-
|
-
|
-
|
| 111
|
-4.76
|
-0.271
|
-6.57
|
-
|
-
|
-
|
| 112
|
-4.77
|
-0.431
|
-13.2
|
-
|
-
|
-
|
| 113
|
-4.77
|
-0.209
|
-3.48
|
-
|
-
|
-
|
| 114
|
-11.9
|
0.0154
|
-9.95
|
-
|
-
|
-
|
| 115
|
-11.9
|
-0.0164
|
-6.34
|
-
|
-
|
-
|
| 116
|
-11.9
|
0.0162
|
-9.96
|
-
|
-
|
-
|
| 117
|
-11.9
|
-0.0172
|
-6.35
|
-
|
-
|
-
|
|