Министерство образования и наук
Российской Федерации
Саратовский государственный технический Университет
Кафедра: «Подъёмно-строительные и дорожно-монтажные машины и оборудование»
КУРСОВАЯ РАБОТА
по Рабочие процессы СДМ
по теме: «Расчет параметров резания автогрейдера и определение параметров виброплиты»
Выполнил: студент гр. ПСМ-31
Ефимов А.В.
Проверил: Куприянов М.В.
Саратов 2010 г.
Содержание
I. Расчет параметров резания автогрейдера
II. Определение параметров виброплиты
2.1 Назначение
2.2 Классификация
2.3 Устройство и процесс работы виброплиты
2.4 Выбор партатипа
2.5 Расчет параметров виброплиты
Список литературы
I
. Расчет параметров резания автогрейдера
Данные для расчета:
М=13т Масса автогрейдера;
G=Mg=12*9,8=117,6кН;
L=5,3м Колёсная база автогрейдера;
l=1,4м и b=0,84м расстояние до реакций опоры;
Kc=0,58; n=0,45; m=-0,35 Коэффициенты отклонения реакций на ноже;
f=0,1 коэффициент трения на ноже;
 э
=0,6 отношение нагрузки относительно мостов, экстремальное значение сцепного веса; э
=0,6 отношение нагрузки относительно мостов, экстремальное значение сцепного веса;
Значение коэффициента отклонения реакций на ноже Kxпри соответствующем значении коэффициента положения центра тяжести C2:
| Kx |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
0,83 |
0,58 |
0,28 |
0 |
| C2 |
0,1 |
0,2 |
0,3 |
0,4 |
0,5 |
0,6 |
0,7 |
0,8 |
0,9 |
Производим расчет при значении коэффициента положения центра тяжести C2=0,1 и соответствующему значение коэффициента отклонения реакций на ноже Kx=0,2.

Расчетная схема автогрейдера.
1. Находим продольную реакцию на ноже.

2. Находим суммарную реакцию грунта на задний мост автогрейдера со стороны грунта по формуле:

3. 

4. Вертикальная реакция грунта определим по формуле:


5. Горизонтальная реакция грунта определим по формуле

6. Сила сопротивления перемещения автогрейдера:


7.

8. Вычисляем разницу 
Если  оставляем полученное значение, если оставляем полученное значение, если 
то рассчитываем  и подставляем это значение, производим перерасчет со 2ого пункта до тех пор, пока разница не достигнет . и подставляем это значение, производим перерасчет со 2ого пункта до тех пор, пока разница не достигнет .

9. 

2’. Находим суммарную реакцию грунта на задний мост автогрейдера со стороны грунта

3’.

4’. Вертикальная реакция грунта определим по формуле:

5’ Горизонтальная реакция грунта определим по формуле

6’. Сила сопротивления перемещения автогрейдера:
7’.

8’. Вычисляем разницу
Если оставляем полученное значение, если
то рассчитываем и подставляем это значение, производим перерасчет со 2ого пункта до тех пор, пока разница не достигнет .

Определяем боковые составляющие суммарных сил сцепления (1 алгоритм)
10. 

11. 

Определяем значение сцепного веса для переднего моста.
12. 
При  решение по первому алгоритму, решение по первому алгоритму,
При  решение по второму алгоритму, решение по второму алгоритму,

Второй алгоритм:
1. 
2. 
3. Вычисляем разницу
Если оставляем полученное значение, если
то рассчитываем и подставляем это значение, производим перерасчет с 1ого пункта до тех пор, пока разница не достигнет
4. 
Для облегчения расчетов воспользуемся программой MSExcel. Полученные данные сведём в таблицу.

| Kx= |
0,2 |
Kx= |
0,2 |
| C2= |
0,1 |
C2= |
0,1 |
| Rx= |
7,301835 |
кН |
Rx= |
3,724652 |
кН |
| z2= |
11,07194 |
кН |
z2= |
11,40902 |
кН |
| P2= |
6,643165 |
кН |
P2= |
6,845414 |
кН |
| y2= |
0,28084 |
кН |
y2= |
0,143256 |
кН |
| x2= |
6,649099 |
кН |
x2= |
6,846913 |
кН |
| F= |
10,584 |
кН |
F= |
10,584 |
кН |
| Rx'= |
-3,9349 |
кН |
Rx'= |
-3,73709 |
кН |
| [Rx-Rx'] |
3,366934 |
кН |
[Rx-Rx'] |
-0,01243 |
кН |
| Rx"= |
3,724652 |
кН |
Rx"= |
-3,05875 |
кН |
| y1= |
1,532838 |
кН |
| z1= |
104,8873 |
кН |
| Q1= |
0,014614 |
кН |
Производим расчет при значении коэффициента положения центра тяжести C2=0,2 и соответствующему значение коэффициента отклонения реакций на ноже Kx=0,4.
| Kx= |
0,4 |
Kx= |
0,4 |
Kx= |
0,4 |
Kx= |
0,4 |
| C2= |
0,2 |
C2= |
0,2 |
C2= |
0,2 |
C2= |
0,2 |
| Rx= |
14,29306 |
кН |
Rx= |
17,8451 |
кН |
Rx= |
4,997763 |
кН |
Rx= |
4,475042 |
кН |
| z2= |
22,17315 |
кН |
z2= |
21,83844 |
кН |
z2= |
23,04906 |
кН |
z2= |
23,09831 |
кН |
| P2= |
13,30389 |
кН |
P2= |
13,10307 |
кН |
P2= |
13,82943 |
кН |
P2= |
13,85899 |
кН |
| y2= |
0,549733 |
кН |
y2= |
0,68635 |
кН |
y2= |
0,192222 |
кН |
y2= |
0,172117 |
кН |
| x2= |
13,31525 |
кН |
x2= |
13,12103 |
кН |
x2= |
13,83077 |
кН |
x2= |
13,86006 |
кН |
| F= |
9,408 |
кН |
F= |
9,408 |
кН |
F= |
9,408 |
кН |
F= |
9,408 |
кН |
| Rx'= |
3,907245 |
кН |
Rx'= |
3,713029 |
кН |
Rx'= |
4,42277 |
кН |
Rx'= |
4,452057 |
кН |
| [Rx-Rx'] |
10,38581 |
кН |
[Rx-Rx'] |
14,13207 |
кН |
[Rx-Rx'] |
0,574993 |
кН |
[Rx-Rx'] |
0,022985 |
кН |
| Rx"= |
17,8451 |
кН |
Rx"= |
4,997763 |
кН |
Rx"= |
4,475042 |
кН |
Rx"= |
4,454146 |
кН |
| y1= |
1,841652 |
кН |
| z1= |
92,93542 |
кН |
Производим расчет при значении коэффициента положения центра тяжести C2=0,3 и соответствующему значение коэффициента отклонения реакций на ноже Kx=0,6.
| Kx= |
0,6 |
Kx= |
0,6 |
Kx= |
0,6 |
Kx= |
0,6 |
| C2= |
0,3 |
C2= |
0,3 |
C2= |
0,3 |
C2= |
0,3 |
| Rx= |
20,99308 |
кН |
Rx= |
31,68889 |
кН |
Rx= |
13,04686 |
кН |
Rx= |
12,28109 |
кН |
| z2= |
33,30181 |
кН |
z2= |
32,29393 |
кН |
z2= |
34,05058 |
кН |
z2= |
34,12274 |
кН |
| P2= |
19,98108 |
кН |
P2= |
19,37636 |
кН |
P2= |
20,43035 |
кН |
P2= |
20,47365 |
кН |
| y2= |
0,807426 |
кН |
y2= |
1,218803 |
кН |
y2= |
0,501802 |
кН |
y2= |
0,47235 |
кН |
| x2= |
19,99739 |
кН |
x2= |
19,41465 |
кН |
x2= |
20,43651 |
кН |
x2= |
20,47909 |
кН |
| F= |
8,232 |
кН |
F= |
8,232 |
кН |
F= |
8,232 |
кН |
F= |
8,232 |
кН |
| Rx'= |
11,76539 |
кН |
Rx'= |
11,18265 |
кН |
Rx'= |
12,20451 |
кН |
Rx'= |
12,24709 |
кН |
| [Rx-Rx'] |
9,227686 |
кН |
[Rx-Rx'] |
20,50623 |
кН |
[Rx-Rx'] |
0,842344 |
кН |
[Rx-Rx'] |
0,033995 |
кН |
| Rx"= |
31,68889 |
кН |
Rx"= |
13,04686 |
кН |
Rx"= |
12,28109 |
кН |
Rx"= |
12,25018 |
кН |
| y1= |
5,054141 |
кН |
| z1= |
79,17888 |
кН |
| Q1= |
0,063832 |
кН |
Производим расчет при значении коэффициента положения центра тяжести C2=0,4 и соответствующему значение коэффициента отклонения реакций на ноже Kx=0,8.
| Kx= |
0,8 |
Kx= |
0,8 |
Kx= |
0,8 |
Kx= |
0,8 |
| C2= |
0,4 |
C2= |
0,4 |
C2= |
0,4 |
C2= |
0,4 |
| Rx= |
27,41971 |
кН |
Rx= |
45,27296 |
кН |
Rx= |
21,08603 |
кН |
Rx= |
20,08781 |
кН |
| z2= |
44,45622 |
кН |
z2= |
42,77389 |
кН |
z2= |
45,05305 |
кН |
z2= |
45,14711 |
кН |
| P2= |
26,67373 |
кН |
P2= |
25,66434 |
кН |
P2= |
27,03183 |
кН |
P2= |
27,08827 |
кН |
| y2= |
1,054604 |
кН |
y2= |
1,741268 |
кН |
y2= |
0,811001 |
кН |
y2= |
0,772608 |
кН |
| x2= |
26,69457 |
кН |
x2= |
25,72334 |
кН |
x2= |
27,04399 |
кН |
x2= |
27,09928 |
кН |
| F= |
7,056 |
кН |
F= |
7,056 |
кН |
F= |
7,056 |
кН |
F= |
7,056 |
кН |
| Rx'= |
19,63857 |
кН |
Rx'= |
18,66734 |
кН |
Rx'= |
19,98799 |
кН |
Rx'= |
20,04328 |
кН |
| [Rx-Rx'] |
7,781142 |
кН |
[Rx-Rx'] |
26,60562 |
кН |
[Rx-Rx'] |
1,098041 |
кН |
[Rx-Rx'] |
0,044531 |
кН |
| Rx"= |
45,27296 |
кН |
Rx"= |
21,08603 |
кН |
Rx"= |
20,08781 |
кН |
Rx"= |
20,04733 |
кН |
| y1= |
8,266908 |
кН |
| z1= |
65,42216 |
кН |
| Q1= |
0,126363 |
кН |
Производим расчет при значении коэффициента положения центра тяжести C2=0,5 и соответствующему значение коэффициента отклонения реакций на ноже Kx=1.
| Kx= |
1 |
Kx= |
1 |
Kx= |
1 |
Kx= |
1 |
| C2= |
0,5 |
= |
0,5 |
C2= |
0,5 |
C2= |
0,5 |
| Rx= |
33,58937 |
кН |
Rx= |
58,61291 |
кН |
Rx= |
29,11527 |
кН |
Rx= |
27,89457 |
кН |
| z2= |
55,63485 |
кН |
z2= |
53,27686 |
кН |
z2= |
56,05645 |
кН |
z2= |
56,17147 |
кН |
| P2= |
33,38091 |
кН |
P2= |
31,96612 |
кН |
P2= |
33,63387 |
кН |
P2= |
33,70288 |
кН |
| y2= |
1,291899 |
кН |
y2= |
2,254343 |
кН |
y2= |
1,119818 |
кН |
y2= |
1,072868 |
кН |
| x2= |
33,4059 |
кН |
x2= |
32,04551 |
кН |
x2= |
33,6525 |
кН |
x2= |
33,71996 |
кН |
| F= |
5,88 |
кН |
F= |
5,88 |
кН |
F= |
5,88 |
кН |
F= |
5,88 |
кН |
| Rx'= |
27,5259 |
кН |
Rx'= |
26,16551 |
кН |
Rx'= |
27,7725 |
кН |
Rx'= |
27,83996 |
кН |
| [Rx-Rx'] |
6,063467 |
кН |
[Rx-Rx'] |
32,4474 |
кН |
[Rx-Rx'] |
1,342769 |
кН |
[Rx-Rx'] |
0,054618 |
кН |
| Rx"= |
58,61291 |
кН |
Rx"= |
29,11527 |
кН |
Rx"= |
27,89457 |
кН |
Rx"= |
27,84492 |
кН |
| y1= |
11,47969 |
кН |
| z1= |
51,66543 |
кН |
| Q1= |
0,222193 |
кН |
Производим расчет при значении коэффициента положения центра тяжести C2=0,6 и соответствующему значение коэффициента отклонения реакций на ноже Kx=0,83.
| Kx= |
0,83 |
Kx= |
0,83 |
Kx= |
0,83 |
Kx= |
0,83 |
| C2= |
0,6 |
C2= |
0,6 |
C2= |
0,6 |
C2= |
0,6 |
| Rx= |
28,36116 |
кН |
Rx= |
61,12762 |
кН |
Rx= |
36,69065 |
кН |
Rx= |
35,68305 |
кН |
| z2= |
67,88751 |
кН |
z2= |
64,7999 |
кН |
z2= |
67,10261 |
кН |
z2= |
67,19756 |
кН |
| P2= |
40,7325 |
кН |
P2= |
38,87994 |
кН |
P2= |
40,26157 |
кН |
P2= |
40,31854 |
кН |
| y2= |
1,090814 |
кН |
y2= |
2,351062 |
кН |
y2= |
1,411179 |
кН |
y2= |
1,372425 |
кН |
| x2= |
40,74711 |
кН |
x2= |
38,95096 |
кН |
x2= |
40,28629 |
кН |
x2= |
40,34189 |
кН |
| F= |
4,704 |
кН |
F= |
4,704 |
кН |
F= |
4,704 |
кН |
F= |
4,704 |
кН |
| Rx'= |
36,04311 |
кН |
Rx'= |
34,24696 |
кН |
Rx'= |
35,58229 |
кН |
Rx'= |
35,63789 |
кН |
| [Rx-Rx'] |
-7,68195 |
кН |
[Rx-Rx'] |
26,88066 |
кН |
[Rx-Rx'] |
1,108364 |
кН |
[Rx-Rx'] |
0,045164 |
кН |
| Rx"= |
61,12762 |
кН |
Rx"= |
36,69065 |
кН |
Rx"= |
35,68305 |
кН |
Rx"= |
35,64199 |
кН |
| y1= |
14,68495 |
кН |
Производим расчет при значении коэффициента положения центра тяжести C2=0,7 и соответствующему значение коэффициента отклонения реакций на ноже Kx=0,58.
| Kx= |
0,58 |
Kx= |
0,58 |
Kx= |
0,58 |
Kx= |
0,58 |
| C2= |
0,7 |
C2= |
0,7 |
C2= |
0,7 |
C2= |
0,7 |
| Rx= |
20,33566 |
кН |
Rx= |
60,99074 |
кН |
Rx= |
44,15873 |
кН |
Rx= |
43,46723 |
кН |
| z2= |
80,40376 |
кН |
z2= |
76,5728 |
кН |
z2= |
78,15889 |
кН |
z2= |
78,22405 |
кН |
| P2= |
48,24225 |
кН |
P2= |
45,94368 |
кН |
P2= |
46,89533 |
кН |
P2= |
46,93443 |
кН |
| y2= |
0,782141 |
кН |
y2= |
2,345798 |
кН |
y2= |
1,698413 |
кН |
y2= |
1,671816 |
кН |
| x2= |
48,24859 |
кН |
x2= |
46,00352 |
кН |
x2= |
46,92608 |
кН |
x2= |
46,9642 |
кН |
| F= |
3,528 |
кН |
F= |
3,528 |
кН |
F= |
3,528 |
кН |
F= |
3,528 |
кН |
| Rx'= |
44,72059 |
кН |
Rx'= |
42,47552 |
кН |
Rx'= |
43,39808 |
кН |
Rx'= |
43,4362 |
кН |
| [Rx-Rx'] |
-24,3849 |
кН |
[Rx-Rx'] |
18,51522 |
кН |
[Rx-Rx'] |
0,760647 |
кН |
[Rx-Rx'] |
0,031033 |
кН |
| Rx"= |
60,99074 |
кН |
Rx"= |
44,15873 |
кН |
Rx"= |
43,46723 |
кН |
Rx"= |
43,43902 |
кН |
| y1= |
17,88844 |
кН |
| z1= |
24,16242 |
кН |
| Q1= |
0,740341 |
кН |
| Второй алгоритм |
| z1= |
35,28 |
кН |
z1= |
25,90745 |
кН |
| Rx'= |
36,622 |
кН |
Rx'= |
36,622 |
кН |
| [Rx-Rx'] |
6,845233 |
кН |
[Rx-Rx'] |
0,022542 |
кН |
| Rx"= |
36,64454 |
кН |
Rx"= |
21,58955 |
кН |
Производим расчет при значении коэффициента положения центра тяжести C2=0,8 и соответствующему значение коэффициента отклонения реакций на ноже Kx=0,28.
| Kx= |
0,28 |
Kx= |
0,28 |
Kx= |
0,28 |
| C2= |
0,8 |
C2= |
0,8 |
C2= |
0,8 |
| Rx= |
10,13447 |
кН |
Rx= |
58,79299 |
кН |
Rx= |
51,54485 |
кН |
| z2= |
93,12502 |
кН |
z2= |
88,53989 |
кН |
z2= |
89,22289 |
кН |
| P2= |
55,87501 |
кН |
P2= |
53,12393 |
кН |
P2= |
53,53373 |
кН |
| y2= |
0,389787 |
кН |
y2= |
2,261269 |
кН |
y2= |
1,982494 |
кН |
| x2= |
55,87637 |
кН |
x2= |
53,17204 |
кН |
x2= |
53,57043 |
кН |
| F= |
2,352 |
кН |
F= |
2,352 |
кН |
F= |
2,352 |
кН |
| Rx'= |
53,52437 |
кН |
Rx'= |
50,82004 |
кН |
Rx'= |
51,21843 |
кН |
| [Rx-Rx'] |
-43,3899 |
кН |
[Rx-Rx'] |
7,972954 |
кН |
[Rx-Rx'] |
0,326424 |
кН |
| Rx"= |
58,79299 |
кН |
Rx"= |
51,54485 |
кН |
Rx"= |
51,2481 |
кН |
| y1= |
21,21269 |
кН |
| z1= |
10,33641 |
кН |
| Q1= |
2,052229 |
кН |
| Второй алгоритм |
| z1= |
23,52 |
кН |
z1= |
16,30966 |
кН |
| Rx'= |
43,42755 |
кН |
Rx'= |
43,42755 |
кН |
| [Rx-Rx'] |
8,1173 |
кН |
[Rx-Rx'] |
-15,2367 |
кН |
| Rx"= |
28,19081 |
кН |
Rx"= |
13,59138 |
кН |
Производим расчет при значении коэффициента положения центра тяжести C2=0,9 и соответствующему значение коэффициента отклонения реакций на ноже Kx=0.
| Kx= |
0 |
| C2= |
0,9 |
| Rx= |
0 |
кН |
| z2= |
105,84 |
кН |
| P2= |
63,504 |
кН |
| y2= |
0 |
кН |
| x2= |
63,504 |
кН |
| F= |
1,176 |
кН |
| Rx'= |
62,328 |
кН |
| [Rx-Rx'] |
-62,328 |
кН |
| Rx"= |
56,66182 |
кН |
| y1= |
0 |
кН |
| z1= |
11,76 |
кН |
| Q1= |
0 |
кН |
В результате данных полученных при расчете строим график зависимости грунта от положения центра тяжести.
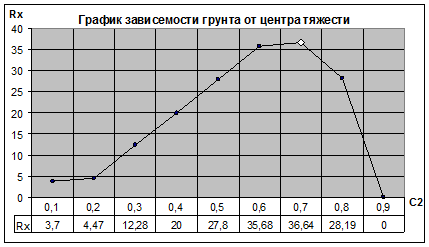
Вывод: по графику можно определить, что при значении коэффициента положения центра тяжести C2=0,7 возникает наибольшая реакция на грунт от ножа Rx=36,64 кН, что является оптимальным при работе автогрейдера.
II
.
Определение параметров виброплиты
2.1 Назначение
Виброплиты применяются для уплотнения грунтов, гравийно-щебеночных и других дорожно-строительных материалов в различных областях строительства.
Вибрационные плиты обеспечивают большую глубину уплотнения, чем катки, при меньших удельных статических и динамических нагрузках на уплотняемый материал. Это достигается за счет большей площади рабочей поверхности плиты при равных с катком других параметрах. Применение многосекционных виброуплотнителей по сравнению с катками обеспечивает повышение производительности труда в 3—4 раза, высокое качество уплотнения, снижение себестоимости уплотнения в 2,0—2,5 раза.
Привод вибровозбудителей может быть механический, электрический и гидравлический. Электрический и гидравлический приводы делают виброплиты независимыми от тягача и позволяют использовать их по одной или в паре на уплотнении материалов в стесненных местах.
К основным параметрам виброплит относят размеры рабочей площади плиты, вес виброплиты, частоту колебаний, величину вынуждающей силы, скорость передвижения и мощность двигателя.
Минимальный размер площади основания виброплиты должен быть больше толщины уплотняемого слоя.
По опытным данным длину основания виброплиты целесообразно принимать равной 1-1,5 ее ширины.
Требуемое уплотнение грунтов находится в зависимости от веса вибромашин. По мере увеличения веса плотность уплотняемого грунта увеличивается.
2.2. Классификация
Виброплиты различают:
- по способу перемещения в работе — на ручные, самопередвигающиеся, прицепные, крановые (переставляемые краном), навесные;
- по характеру колебаний — с круговыми и направленными колебаниями;
- по виду привода вибратора — механические, гидравлические, электрические и пневматические;
- по весу — легкие весом 0,1—2 Т, средние 2—4 T и тяжелые 4—8 Т.
Наибольшее распространение имеют самопередвигающиеся виброплиты с механическим приводом вибровозбудителя от двигателя внутреннего сгорании и с ручным управлением.
Ручные виброплиты но время работы перемещаются вручную оператором. Применяются они на объектах с малым объемом работ и преимущественно в узких местах. Они изготавливаются весом, до 100 кГ. Большинство ручных виброплит выпускаются с электрическим приводом. В Советском Союзе ручные плиты не производятся. За рубежом они выпускаются фирмами Вакер и Лозенгаузен (ФРГ).
Самопередвигающиеся виброплиты при малых габаритных размерах и небольшом весе по сравнению с другими уплотняющими машинами обладают высокой эффективностью и приспособлены для производства работ в разнообразных условиях, в том числе в стесненных и труднодоступных местах, в которых невозможно или нерационально использование машин других типов.
2.3 Устройство и процесс работы виброплиты
Основными частями самопередвигающихся виброплит являются рабочая плита, вибратор, подмоторная рама, двигатель, трансмиссия, система подвески, механизмы управления. Плиты изготавливаются из стали литыми или сварными. На плите жестко закреплен вибровозбудитель. Привод его осуществляется клиноременной передачей от двигателя внутреннего сгорания, установленного на подмоторной раме. На некоторых моделях виброплит применяются электродвигатели. Самопередвижение виброплиты происходит за счет наклона к вертикали суммарной вынуждающей силы вибратора.
Управление почти всеми плитами — ручное при помощи рукоятки. Выпускаются также виброплиты с механизированным управлением: механизация управления обеспечивается за счет применения вибровозбудителей специальной конструкции.
Схема вибровозбудителя с тремя дебалансами, расположенными в одном корпусе. Средний дебаланс жестко закреплен па общем валу возбудителя и по своему статическому моменту массы равен сумме статических моментов массы двух одинаковых крайних дебалансов, установленных на валу на подшипниках качения. Вал вибровозбудителя вращается на подшипниках качения, установленных в боковых крышках корпуса. Корпус вибровозбудителя имеет цилиндрическую форму. К нижней части корпуса приварены лапы, при помощи которых он прикрепляется к плите. Привод возбудителя осуществляется двумя клиноременными передачами. Изменение направления вращения правого или левого подвижных дебалансов оператор производит штурвалом при помощи червячных и цилиндрических шестеренчатых передач.
При вращении червячных шестерен вперед или назад цилиндрические шестерни будут поворачивать на необходимый угол крайние дебалансы и этим изменять направление суммарной вынуждающей силы и, следовательно, направление движения виброплиты.
При положении всех трех дебалансов, т. е. среднего и двух крайних под углом наклона около +30° к горизонтальной поверхности, виброплита будет двигаться вперед, при установке их под углом 90° виброплита будет работать на месте и совершать вертикально направленные колебания, а при установке под углом —30° к горизонтальной поверхности виброплита будет двигаться назад.
При изменении положения одного из крайних дебалансов, виброплита будет поворачиваться соответственно вправо или влево, а при положении одного дебаланса вперед, а другого назад будет происходить разворот машины на одном месте.
Направление суммарной вынуждающей силы под углом, близким к ±30° к горизонтальной поверхности, является оптимальным как для уплотнения, так и для передвижения.
Возможная схема вибровозбудителя самопередвигающейся виброплиты с механизированным управлением. На общем валу установлены четыре дебаланса. Крайние дебалансы выполнены совместно с приводными шкивами возбудителя, установленными жестко на валу. Средние дебалансы установлены на подшипниках качения и соединены посредством цилиндрических шестерен с червячным колесом. Положение средних дебалансов оператор может изменять при помощи штурвала, изменяя этим направление действия вынуждающей силы. В том случае, когда горизонтальные составляющие средних дебалансов направлены в одну сторону, т. е. совпадают, происходит самопередвижение машины, а в том случае, когда между ними образуется некоторый угол, происходит поворот плиты в сторону меньшей горизонтальной силы.
2.4 Выбор партатипа
За аналог при расчетах выбираем:
Вибромашина ВБ-1 предназначена для уплотнения различных сыпучих материалов (песок, гравий, щебень), тощего бетона, асфальта.

Технические характеристики Вибромашины ВБ-1:
Ширина захвата, 412 мм
Двигатель «Мотор Січ Д-70»
Макс. мощность, 3.4(4.6)+10% кВт (л.с.)
Масса, 6,7 кг
Число оборотов, 9000 об/мин
Число оборотов вибратора, 5000(+400) об/мин
Центробежная сила вибратора, 19,2 кН
Частота вибрации, 120 Гц
Скорость движения, не более 20 м/мин
Способность подъема, не более 30 %
Рабочая площадь, 0,15 м2
Емкость водяного бака, 5,0 л
Уд. расх. топлива при макс. мощности, 1,98 кг/ч
Емкость топливного бака, 2,4 л
Амплитуда колебаний, не более 0,48 мм
Габаритные размеры, 740х430х500 мм
Вес в снаряженном состоянии, 107 кг
2.5
Расчет
параметров виброплиты
Исходные данные:
Возмущающая сила Q=19200H
Частота вращение вибратора n=5000 об/мин
Масса вибрирующей массы m1=6,7 кг
Масса всей машины m=107 кг
Мощность привода N=3,4 кВт
Частота собственных колебаний принимаем к=0,
КПД ременной передачи n=0,96
Произведём расчет параметров при угле сдвига фаз равным 0
1. Сила сопротивления найдем по формуле:
 , ,
Где  - угол сдвига фаз - угол сдвига фаз
 =Qвыражение принимает вид: =Qвыражение принимает вид:

2. Амплитуда колебаний определим по формуле:

w- частота внутренних колебаний


3.Момент определим по формуле:
 

4. Мощность определим по формуле:


5. Найдем реальную мощность двигателя, учитывая КПД клиноремённой передачи.
 , ,
где КПД клиноремённой передачи  =0,96 =0,96
Далее производим аналогичные расчеты при угле сдвига фаз с шагом равным 5 до 45. Для облегчения расчетов воспользуемся программой MSExcel. Полученные данные сведём в таблицу.

Из таблицы видно, что при угле сдвига фаз равным  наблюдается максимальная мощность данного двигателя. наблюдается максимальная мощность данного двигателя.
Вывод: в результате проделанной работы, видно, что именно при угле смещения фаз равном 42 ° наблюдаются оптимальные параметры работы виброплиты, а именно, мощность двигателя на соответствующих оборотах, амплитуда вибрации. Следовательно, просчитаны параметры оптимальной работы и уплотнения обрабатываемой поверхности.
Список литературы
1. Бауман В.А. «Вибрационные машины в строительстве и производстве строительных материалов» машиностроение 1970г.
2. Сластёнов В.В. «Исследование безрезонансного управляемого вибропривода строительных машин» Саратов 1965г.
3. Сапожников М.А. «Механическое оборудование предприятий строительных материалов, изделий и конструкций» Высшая школа 1971г.
|