Реферат
Хиндикайнен Е.С. Проектирование воздушно-динамического рулевого привода управляемой гиперзвуковой ракеты зенитного комплекса: Дипломный проект / ТГУ - Тула, 2006.
ВОЗДУШНО-ДИНАМИЧЕСКИЙ РУЛЕВОЙ ПРИВОД, ГАЗОРАСПРЕ-ДЕЛИТЕЛЬНОЕ УСТРОЙСТВО, РАБОЧАЯ ПОЛОСТЬ, СОПЛО, ПРИЕМНИК, ШПАНГОУТ, АЭРОДИНАМИЧЕСКИЕ РУЛИ, ЭЛЕКТРОМАГНИТ.
Целью дипломного проекта является разработка воздушно-динамического рулевого привода.
В ходе выполнения проекта необходимо обосновать выбор типа и структуры привода, составить математическую модель привода, рассчитать конструктивные параметры, произвести тепловой расчет конструкции, рассчитать управляющий электромагнит и динамические характеристики привода.
В технологической части составлены маршрутные карты и технологический процесс сборки рулевой машины.
В экономической части составить сетевой график процесса проектирования рулевого привода.
В проекте рассмотрены вопросы охраны труда, меры по недопущению вредных и опасных факторов, электробезопасность, пожарная безопасность.
Содержание
Введение
1. Основная часть
1.1 Обоснование выбора типа привода и его структуры
1.2 Принцип действия РП
1.3 Математическое описание функционирования ВДРП
1.4 Расчет первоначального варианта РП
1.5 Расчет обобщенных и конструктивных параметров
1.6 Описание конструкции РП
1.7 Тепловой расчет конструкции
1.8 Математическая модель РП
1.9 Расчет автоколебательной системы ВДРП и ее динамических характеристик
1.10 Расчет управляющего электромагнита
2. Технологическая часть
2.1 Разработка приспособления
2.2 Порядок работы с приспособлением
3. Экономическая часть
3.1 Составление и расчет сетевого графика
4. Охрана труда
4.1 Анализ вредных и опасных факторов при проектировании РП
4.2 Меры по недопущению вредных и опасных факторов
4.2.1 Расчет освещенности
4.2.2 Электробезопасность
4.2.3 Пожарная безопасность
Заключение
Список использованной литературы
Введение
Любой товаропроизводитель при создании нового вида продукции преследует определенные цели; удовлетворение спроса на рынке, получение определенного объема прибыли посредством продажи данного продукта.
Чтобы достигнуть этих целей в нынешних условиях существования наших предприятий необходимо добиваться улучшения ряда показателей: повышение качества выпускаемой продукции, снижение себестоимости изготовления изделия, повышение числа дополнительных возможностей изделия, потребительских новшеств, что делает изделие более привлекательным по сравнению с аналогичными конкурирующими изделиями, и другие показатели, позволяющие привлечь потенциальных покупателей и устоять в усиливающей конкурентной борьбе товаропроизводителей.
Принципиально к военной технике, в данном случае, летательным аппаратам, предприятие - изготовитель должно работать над следующими показателями, характеризующие изделие: снижение стоимости, уменьшение общей массы летательного аппарата за счет введения в конструкцию изделия технических нововведений, постоянное повышение качества изготовления, простота эксплуатации и обслуживания.
Производя продукцию с учетом этих показателей оборонное предприятие сможет производить конкурентоспособную продукцию и удовлетворять запросы любых заказчиков.
Управление летательным аппаратом (ЛА) является важнейшей научной и практической проблемой современного самолето и ракетостроения.
Для обеспечения полета ЛА по требуемой траектории применяется совокупность различных технических средств, представляющая собой систему управления.
По функциональному назначению входящие в систему управления ЛА устройства можно разбить на три группы:
1) устройства формирования управляющего воздействия с сигнала управления;
2) органы управления, которые создают управляющие усилия;
3) рулевые приводы, приводящие органы управления в действие в соответствии с управляющим воздействием.
Так как данный дипломный проект посвящен разработке рулевого при вода, рассмотрим более подробно 3-тью группу устройств.
Рулевые приводы осуществляют в системе управления функциональную взаимосвязь между устройствами первой и второй групп. Поэтому наряду с функциональными элементами, обеспечивающими создание силового воздействия на органы управления (источники питания, кинематически связанные с органами управления исполнительные двигатели, элементы энергетических магистралей), рулевые приводы включают функциональные элементы, которые устанавливают соответствие этого силового сигнала формируемому в системе управления управляющему сигналу (преобразователи и усилители электрических сигналов, электромеханические преобразователи, различного вида датчики).
Для конкретизации областей исследования задач, стоящих при разработке рулевых приводов, в их составе выделяют силовую и управляющую системы. Силовая система объединяет функциональные элементы рулевого привода, которые непосредственно участвуют в преобразовании энергии источника питания в механическую работу, связанную с перемещением позиционно нагруженных органов управления.
Управляющую систему составляют функциональные элементы рулевого привода, которые обеспечивают изменение регулируемой величины (координаты положения органов управления) по заданному или выработанному в процессе полета ЛА закону управления.
Структура, характеристики и конструкция рулевого привода определяются типом летательного аппарата. В данном дипломном проекте рассматривается рулевой привод для малогабаритных ЛА, полет которых происходит в плотных слоях атмосферы. Такие рулевые приводы осуществляют перемещение, как правило, поворотных аэродинамических рулей ЛА и характеризуются высоким быстродействием, способностью развивать значительные усилия при низкой массе и малых габаритах конструкции. Их энергетические и габаритно-массовые характеристики существенно зависят от вида используемой энергии.
Бурное развитие ЛА в пятидесятых годах заставило применять пневмопривод с воздушным аккумулятором давления в системах управления ЛА из-за того, что он был наиболее дешевым, простым и надежным рулевым механизмом.
В шестидесятых годах получили распространение рулевой привод на горячем газе, широко применяемый и в настоящее время. Переход от воздушного аккумулятора давления в системах рулевых приводов, 'занимающего значительный объем в ЛА, к малогабаритному и простому в изготовлении пороховому генератору газа позволил улучшить габаритно-массовые и эксплутационные характеристики рулевых приводов.
Создание в семидесятых годах рулевого привода без бортового источника питания - воздушно-динамического - положило начало новому этапу совершенствования рулевых приводов малогабаритных ЛА;
Следует также упомянуть о существовании электромагнитных рулевых приводов, в которых управления лопастями происходит напрямую силовым электромагнитом, напитываемым от аккумуляторной батареи. Однако они так же не получили широкого применения вследствие малой мощности и большого веса источника питания электромагнита.
1.
Основная часть
1.1 Обоснование выбора типа привода и его структуры
Классификация приводов.
Приводы лопастей предназначены для преобразования электрических сигналов управления в механическое перемещение лопастей, жестко связанных с подвижными частями исполнительного двигателя.
Исполнительный двигатель преодолевает при этом действующие на лопасть шарнирные нагрузки, обеспечивая необходимую скорость и необходимое ускорение при обработке заданных выходных сигналов с требуемой динамической точностью.
На базе уже существующих конструкций приводы могут быть классифицированы:
1) по типу силовой системы:
- воздушно - динамические;
- пневматические;
- горячегазовые;
- электромагнитные;
2) по принципу управления лопастями:
- релейное двух и трехпозиционное управление;
- пропорциональное управление;
3) по схеме управляющей системы:
- автоколебательная с двух и трехпозиционным управлением;
- самонастраивающаяся с генератором вынуждающих колебаний и с двух и трехпозиционным управлением;
- автоколебательная с генератором вынуждающих колебаний и с двух и трехпозиционным управлением;
4) по типу исполнительного двигателя:
- одностороннего и двух стороннего действия;
- полуоткрытого и закрытого типа;
5) по типу распределительного устройства:
- поворотный золотник на входе, на выходе, на входе и выходе одновременно;
- струйная трубка;
- клапанное распределительное устройство на входе, выходе, входе и выходе одновременно.
Выбор типа РП.
Создавая новую конструкцию РП с учетом требований, изложенных в введении, необходимо выбирать такой тип привода, который обеспечивал бы требования по точности при меньшей массе и расходовал бы меньшее количество энергии по сравнению с другими типами приводов.
Для малогабаритных ракет наиболее перспективными являются рулевые привода, которые используют скоростной напор набегающего потока воздуха, получившие название — воздушно-динамические рулевые привода.
Привода такого типа не требуют размещения на борту летательного аппарата специального источника энергии для осуществления поворота рулевых лопастей. В таком приводе поворот рулей осуществляется за счет набегающего потока воздуха. Отсутствие источника энергии улучшает массо-габаритные характеристики. Такие привода обладают следующими преимуществами перед другими приводами: простотой конструкции и обслуживания, малой металлоемкостью, небольшой трудоемкостью изготовления, надежностью работы, сравнительно невысокой стоимостью.
Воздушно-динамические рулевые привода развивают достаточную мощность и обеспечивают необходимое быстродействие, при этом аэродинамическое сопротивление, создаваемое воздухозаборником, пренебрежимо мало.
Системы приводов, использующие аэродинамический напор воздуха, обладают следующими свойствами:
- независимость габаритов силовой системы от времени работы,
- соответствие располагаемых и требуемых характеристик в широком диапазоне скоростей, постоянство фазового сдвига в широком диапазоне частот вращения.
1. В состав РП входят:
1) две рулевые машины (РМ);
2) шпангоут с аэродинамическими рулями;
3) воздухозаборное устройство;
4) блок усилителей,
5) теплоотборник
2. Основные технические требования к РП следующие:
1) РП двухканальный, воздушно-динамический. Зависимость отклонения рулей от входного сигнала пропорциональная;
2) максимальный угол отклонения рулей αm
= ±25o
±l °;
3) форма и геометрические размеры руля представлены на рис. 1.1
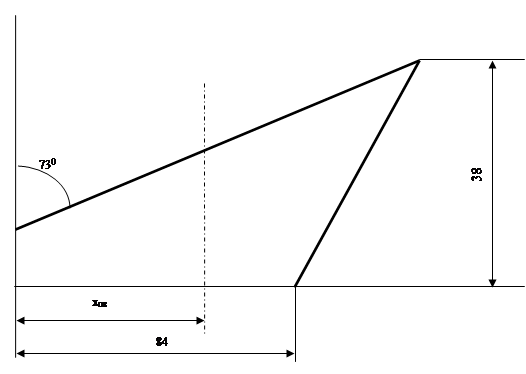
Рис. 1.1. Геометрическая форма и размеры руля.
4) динамические характеристики РП обеспечиваются в диапазонах:
чисел Маха (М)........................................ от 1,1 до 5,5
частот вращения по крену (Гц)....................от 3,0 до 21,0
температур воздуха на входе (Та
), К........ от 223 до 2140
шарнирных нагрузок (Мш
) Нּм................... от минус 0,1 до минус 6,35;
избыточных давлений (Pи
), Па от 1,2-10 до 38,0-10
5) РП обеспечивает заданные динамические характеристики с момента начала управления (ty
) при М > 1,1:
ty= 0,59 с при Та =-50°С;
ty
= 0,50 c при Та = 20°С;
ty
= 0,37 c при Та = 50°С;
6) фазовые сдвиги РП при синусоидальном входном сигнале в диапазоне частот вращения fmin
-f max
и амплитудах входного сигнала 0-25° от минус 5 до минус 25°;
7) нормированный коэффициент передачи в линейной зоне по первой гармонике при синусоидальном входном сигнале в условиях работы ракеты и с учетом погрешности изготовления при номинальном напряжении питания
k = 0,7-1,15;
8) номинальное значение коэффициента передачи, относительно ко-торого нормируется коэффициент передачи РП,
kном
= 5,8°/В. Коэффициент передачи изменяется обратно пропорцио-нально питающему напряжению.
9) ненули на выходе РП (Δδ) с момента начала управления (М ≥ 1,1) не более 2,5°, до начала управления Δδ≤ = ± 25°;
10) РП должен быть стойким, прочным и устойчивым на всех этапах эксплуатации к воздействию внешних факторов в соответствии с требованиями ТЗ и требованиями ГОСТ В20.39.302-76, ГОСТ В20.39.303‑76, ГОСТ В20.39.304-76, ГОСТ В20.39.308-76, предъявляемыми к изделиям классификационной группы 4.3 с учетом требований групп 1.7 и 1.13;
11) время боевой работы РП на траектории не менее 18,8 с. Ресурс работы РП не менее 2 ч, в том числе с подачей пневмопитания -1ч.
Успех проектирования зависит не только от типа привода, но и от его структуры. При выборе структуры привода необходимо принимать во внимание требования, предъявляемые к приводу: ограничения по динамическим характеристикам, массо-габаритные характеристики, величина потребляемого тока от источника энергии. В системах приводов применяются структуры систем непрерывного и релейного действия. Системы приводов непрерывного действия более трудоемки в сравнении с системами релейного действия, так как их элементы должны иметь линейные статические характеристики. В системах приводов релейного действия используются более простые элементы: усилитель мощности, электромагнит, распределитель функционируют в двухпозиционном режиме. Автоколебания системы приводов не требуют обеспечения устойчивости. Наиболее просты разомкнутые системы приводов, но по сравнению с системами приводов с обратной связью требуемые динамические характеристики в них обеспечиваются за счет повышения мощности привода. Привод с большой мощностью требует большого расхода энергии: электромеханический преобразователь должен иметь большой электромагнитный момент, что обуславливает увеличение его объема и массы; от усилителя мощности требуется большая мощность для управления. Все это приводит к существенному увеличения объема и массы системы привода. В замкнутой системе привода вводятся датчик обратной связи, измеритель ошибки. Обычно они занимают малые объемы, имеют малые массы. Автоколебательные системы имеют лучшие динамические характеристики.
Поэтому, приходим к выводу, что при заданных нагрузках и требуемых динамических характеристиках целесообразно, для обеспечения минимальных габаритов и массы летательного аппарата, применение замкнутого автоколебательного рулевого привода, использующего в качестве рабочего тела скоростной напор встречного потока воздуха.
Перспективность проектирования рулевого привода релейного действия обусловлена следующими преимуществами: в замкнутом контуре обеспечиваются высокочастотные автоколебания малой амплитуды, благодаря которым линеаризуются нелинейности в механической передаче (люфт, трение покоя), в электромагните (зона нечувствительности) и практически исключается их влияние на преобразование управляющих сигналов; достигается высокая динамическая точность; система состоит из меньшего числа элементов по сравнению с системами непрерывного действия; система релейного действия проста в изготовлении, так как не требует регулировки; требует минимального объема проверок.
1.2 Принцип действия РП
При полете управляемой ракеты набегающий поток воздуха через носовой воздухозаборник, теплообменник и распределительное устройство проходит в рабочие полости РМ. С блока усилителей сигнал ошибки, равный разности сигналов управления и датчика обратной связи, подается поочередно на одну или другую обмотки управляющего электромагнита. При поступлении сигнала в одну из обмоток якорь притягивается к ней и устанавливает струйную трубку напротив соответствующего окна приемника. Воздух поступает в рабочую полость, и в ней устанавливается максимальное давление, одновременно вторая полость оcвобождается. Под действием разницы рабочих давлений в рабочих полостях рули смещаются пропорционально входному сигналу, совершая при этом высокочастотные автоколебания. При отсутствии - входного сигнала автоколебания совершаются относительно нулевого положения рулей.
1.3 Математическое описание функционирования воздушно-динамического привода
Состояние физического тела — однородного газа — в некотором проточном объёме Wi
в каждый момент времени характеризуется совокупностью следующих параметров:
- давления Pi
- удельного весаγ
i
- температуры Ti
.
Для этого газа, полагая его идеальным, справедливо уравнение состояния:
 (1.3.1)
(1.3.1)
Из этого уравнения следует, что независимых величин, характеризующих состояние газа в проточной полости, две. В термодинамике для их определения используются два закона:
- закон сохранения энергии;
- закон сохранения массы.
Принимаем допущения о том, что параметры газа являются медленно меняющимися по сравнению с изменением сигналов управления.
Это позволяет разбить уравнение нелинейной нестационарной модели привода на две группы уравнений:
- уравнения с медленно меняющимися координатами;
- уравнения с быстро меняющимися координатами.
Учитывая выше изложенное, применим для описания функционирования привода законы сохранения энергии.
Расчетная схема канала РП представлена на рисунке 1.3.1
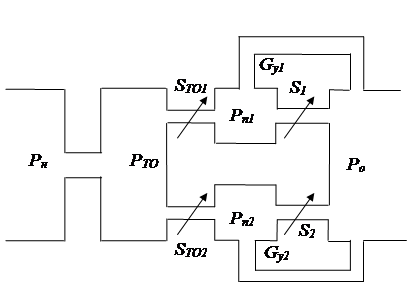
Рис 1.3.1 Расчетная схема рулевого привода
Закон сохранения энергии можно записать в следующем виде:
- для полости теплоотборника
 ; (1.3.2) ; (1.3.2)
- для рабочей полости
 ;(1.3.3) ;(1.3.3)
- для полости отсека
 (1.3.4) (1.3.4)
Закон сохранения массы:
-для полости теплоотборника
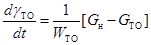 ; (1.3.5) ; (1.3.5)
- для рабочей полости
 (1.3.6) (1.3.6)
-
для полости отсека
 (1.3.7)
(1.3.7)
Удельный приход (расход) энергии находим по зависимостям:
  (1.3.8) (1.3.8)
Массовый секундный приход (расход) газа в рабочей полости определяется по формулам:
 (1.3.10) (1.3.10)
Функции режима течения определяются по формулам:
  (1.3.11) (1.3.11)
  
 при при
 ; ;
Математическое описание двигателя включает а себя еще и уравнения, полученные из уравнения состояния. Они имеют вид:
- для полости теплоотборника
 ; (1.3.12) ; (1.3.12)
- для рабочей полости
 (1.3.13) (1.3.13)
- для полости отсека
 (1.3.14) (1.3.14)
С учетом теплообмена будем иметь следующие зависимости:
-для стенок теплоотборника
 ; (1.3.15) ; (1.3.15)
- для стенок рабочей полости
 ; (1.3.16) ; (1.3.16)
- для стенок отсека
 ; (1.3.17) ; (1.3.17)

Механическая подсистема описывается следующими уравнениями:
 (1.3.18) (1.3.18)
Эффективные сечения входного и выходного отверстий распределительного устройства типа «струйная трубка» с достаточной для инженерной практики точностью можно описать с помощью полинома первой степени.
- для входного сечения:
 ; (1.3.19) ; (1.3.19)
 . .
- для выходного сечения:
 ; (1.3.20) ; (1.3.20)
 . .
Используя выражение для параметров  можно записать: можно записать:
 ; ;  ; ;
тогда:
 ; ;
 ; где ; где  ; ;
где  и и  - соответственно, фактический и максимальный углы поворота распределителя. - соответственно, фактический и максимальный углы поворота распределителя.
Полное нелинейное математическое описание (МО) исполнительного механизма имеет вид:
1. 

2.

3. 

4. 
5. 
7. 
8. 
Математическое описание исполнительного механизма будет иметь следующий вид:

 (1.3.21) (1.3.21)
где Т
г
=  
где Тум
- постоянная времени управляющего электромагнита;
ζ
- коэффициент колебательности;
kум
- коэффициент аппроксимации;
Ubx
- напряжение входного сигнала;
PПi
- давление в полостях привода;
k - показатель адиабаты;
Пто
- удельный расход энергии в теплоотборнике;
Gto
- удельный массовый секундный расход рабочего тела в теплоотборнике;
ПП1,2
- удельный расход энергии в рабочих полостях;
GП1,2
- удельный массовый секундный расход рабочего тела в полостях;
SП
- площадь поршня;
1 - плечо;
δ, δ m
- угол поворота и максимальный угол поворота рулей;
W1,2
- объем рабочих полостей;
ТП1,2
- температура рабочего тела в полостях;
γ П1,2
- удельный вес рабочего тела в полостях;
R - универсальная газовая постоянная;
I∑
- приведенный суммарный момент инерции подвижных частей;
f - коэффициент вязкого трения;
mш
(δ) - жесткость шарнирной нагрузки;
Мстр
- момент сухого трения;
kо
- газодинамический коэффициент;
PТО
-
давление в ресивере;
YП1,2,
YТО1,2
- газодинамические функции режима течения;
µSbx1,2
, µSbыx1,2
- эффективные площади втекания и истечения в рабочих полостях;
Pо
- давление в отсеке;
с - коэффициент, характеризующий регулируемое втекание;
α, αm
- угол поворота и максимальный угол поворота якоря управляющего электромагнита;
α, αу
- коэффициенты, характеризующие регулируемое истечение.
Структурная схема исполнительного механизма будет иметь следующий вид:
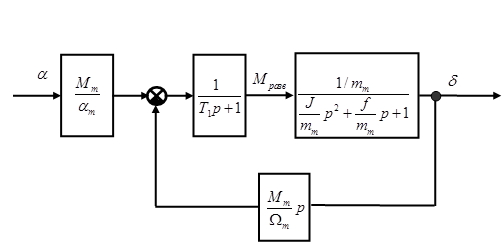
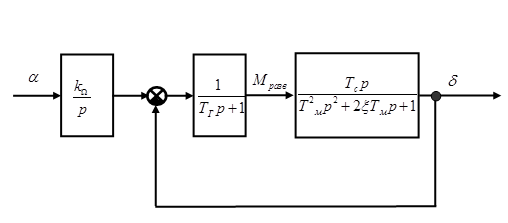
Рис 1.3.2 Структурная схема исполнительного механизма.
1.4 Расчет первоначального варианта ВДРП
Проанализируем диапазон чисел Маха на участке управляемого полета:
М= 1,1÷Кб;
В таблице 1.1 отражена зависимость коэффициента  от чисел Маха: от чисел Маха:
Таблица 1.1
| Мах |
1,1 |
2 |
3 |
4 |
5 |
6 |
|
1,45 |
1,45 |
1,4 |
1,3 |
1,2 |
1,1 |
Значения коэффициента подъемной силы cn
= f (M, αэф
) и относительного положения центра давления xd
= f (αэф
, М) приведены, соответственно, в таблицах 1.2 и 1.3
Таблица 1.2 коэффициент сп
| 1,1 |
2 |
3 |
4 |
5 |
6 |
| 5° |
0,2523 |
0,22 |
0,156 |
0,126 |
0,111 |
0,101 |
| 10° |
0,5046 |
0,44 |
0,312 |
0,252 |
0,222 |
0,202 |
| 15° |
0,7569 |
0,66 |
0,468 |
0,378 |
0,333 |
0,303 |
| 20° |
0,0092 |
0,88 |
0,624 |
0,504 |
0,444 |
0,404 |
| 25° |
1,261 |
1,1 |
0,78 |
0,63 |
0,555 |
0,505 |
| 30° |
1,5138 |
1,32 |
0,936 |
0,756 |
0,666 |
0,606 |
| 35° |
1,766 |
1,54 |
1,092 |
0,882 |
0,777 |
0,707 |
| 40° |
2,0188 |
1,76 |
1,248 |
1,008 |
0,888 |
0,808 |
| 45° |
2,2707 |
1,98 |
1,404 |
1,134 |
0,999 |
0,909 |
| Таблица |
1.3 |
центр давления |
xd
(мм) |
| 1,1 |
2 |
3 |
4 |
5 |
6 |
| 0° |
53 |
55 |
54,6 |
54,1 |
53,4 |
52,8 |
| 5° |
53 |
54,75 |
54,5 |
54 |
53,4 |
52,8 |
| 10° |
53 |
54 |
54 |
53,5 |
53,4 |
52,8 |
| 15° |
53 |
53 |
53 |
53 |
53,4 |
52,8 |
| 20° |
53 |
52,5 |
52,5 |
53 |
53,4 |
52,8 |
| 45° |
53 |
52,5 |
52,5 |
53 |
53,4 |
52,8 |
Выбираем положение оси вращения руля:
Хов
= (0,05 ÷
0,1) - (Xdmax
- Xdmin
) + Xdmin
Значение хов
= 52 мм

Рассчитаем значения шарнирных нагрузок по зависимости:
 (1.4.2) (1.4.2)
где
q = 0,725 М2
;
вр
- аэродинамическая хорда; вр
= 86 мм;
Sxap
- площадь сечения ракеты; S xap
= 28,27 см2;
сп
- коэффициент подъемной силы;
xd
- относительное положение центра давления;
Значения шарнирных нагрузок приведены в таблице 1.4
Таблица 1.4
значения шарнирных нагрузокМн
[кгсм]
| 1,1 |
2 |
3 |
4 |
5 |
6 |
| 5° |
-0,6257 |
-4,9599 |
-7,1970 |
-8,2639 |
-7,9626 |
-5,9618 |
| 10° |
-1,2514 |
-7,2145 |
-11,5104 |
-12,3958 |
-15,9252 |
-11,9236 |
| 15° |
-1,8771 |
-5,4108 |
-8,6328 |
-12,3958 |
-23,8878 |
-17,8854 |
| 20° |
-2,5028 |
-3,6027 |
-5,7552 |
-16,5278 |
-31,8504 |
-23,8452 |
| 45° |
-5,6313 |
-8,1163 |
-12,9492 |
-37,1875 |
-71,6634 |
-53,6562 |
Зависимость шарнирных нагрузок от чисел Маха и от эффективных углов  приведены на рисунке 1.4.1. приведены на рисунке 1.4.1.
Рассчитаем значения избыточных давлений при соответствующих числах Маха по зависимости:
 ; (1.4.3) ; (1.4.3)
при  , Рст
= 1 ат; , Рст
= 1 ат;
при  , Рст
= f(H,T); , Рст
= f(H,T);
Определим изменения параметра  характеризующего соотношение момента нагрузки и развиваемого приводом момента: характеризующего соотношение момента нагрузки и развиваемого приводом момента:
 ; (1.4.4) ; (1.4.4)
 ; ;
где
 - избыточное давление, - избыточное давление,
сп
- коэффициент подъемной силы,
хов
- положение оси вращения руля,
хd
- относительное положение центра давления,
М
- число Маха.
Рассчитаем значение энергетической функции, которая характеризует отношение мощности потребной и мощности развиваемой:
 ; ;
где Nпотр
= , ,
 - потребная скорость; - потребная скорость;
 - потребный момент; - потребный момент;
 - максимальный момент; - максимальный момент;
 - максимальная скорость; - максимальная скорость;
 (1.4.5) (1.4.5)
где fвp
- частота вращения, Гц
Мн
- момент нагрузки,
Yn
- газодинамическая функция расхода,
Т - температура газа в рабочей полости.
Все данные, рассчитанные по выше изложенным зависимостям, представлены в таблицах 1.5-1.8.
Таблица 1.5 ,Т = -50°С
сэнерг
|
-4,31 |
-1,93 |
-3,43 |
-5,93 |
-4,45 |
-7,796 |
-5,233 |
Mн,
кг/см
|
-2,55 |
-5.12 |
-14,5 |
-43,5 |
-47,5 |
-65 |
-37,5 |
| kσ
|
-0,0098 |
-,00408 |
-0,00372 |
-0,00486 |
-0,00366 |
-0,0067 |
-0,00637 |
| Pизб
,атм |
1,182 |
5,34 |
15,15 |
35,51 |
49,69 |
28,48 |
22,69 |
| М |
1,12 |
2,17 |
3,51 |
5,28 |
6,25 |
4,75 |
4,25 |
| fвр,
Гц |
4,75 |
5,54 |
8,5 |
11,5 |
11,2 |
8,1 |
7,5 |
| αδ
о
|
1,814 |
2,189 |
2,473 |
1,878 |
12,282 |
12,714 |
12,551 |
| Н,м |
1 |
1 |
1 |
1 |
1 |
1 |
1 |
V, м/с
.
|
336 |
651 |
1053 |
1584 |
1875 |
1425 |
1275 |
t,с
•
|
0,6 |
1,0 |
1,5 |
2,0 |
2,8 |
8,8 |
10,1 |
Таблица 1.6,Т = +50°С
| сэнерг
|
-4,7 |
-2,63 |
-2,48 |
-5,18 |
-7,98 |
-5,54 |
Мн
,
Кг/см
|
-2,85 |
-4,42 |
-12,5 |
-48 |
-66,5 |
-39,5 |
| kσ
|
-0,0082 |
-0,0059 |
-0,0055 |
-0,00367 |
-0,0065 |
-0,00638 |
| Ризб,атм
|
1,28 |
3,45 |
13,26 |
44,51 |
28,48 |
21,89 |
| М |
1,27 |
1,75 |
3,31 |
5,92 |
4,75 |
4,17 |
| fар
,Гц |
6,05 |
5,8 |
7,5 |
15,75 |
9,74 |
8,8 |
| α0
δ
|
1,921 |
2,124 |
1,876 |
12,298 |
12,771 |
12,752 |
| Н, м |
1 |
1 |
1 |
1 |
1 |
1 |
| V, м/с |
381 |
525 |
993 |
1776 |
1425 |
1251 |
| t, с |
0,4 |
0,6 |
1,0 |
1,5 |
7,8 |
10,1 |
Таблица 1.7 ,Т = -50°С
| сэнерг
|
-4,076 |
-1,933 |
-2,185 |
-5,004 |
-7,195 |
-7,197 |
-2,717 |
-2,651 |
-1,418 |
| Pст
|
1,02 |
0,98 |
0,92 |
0,855 |
0,795 |
0,73 |
0,415 |
0,26 |
0,14 |
Мнr
,
Кг/см
|
-3,24 |
-5,468 |
-9,29 |
-30,44 |
-48,26 |
-45,62 |
-25,02 |
-15,5 |
-7,64 |
Мн
,
Кг/см
|
-3,18 |
-5,58 |
-10,1 |
-35,6 |
-60,7 |
-62,5 |
-60,3 |
-59,6 |
-54,6 |
| kσ
|
-0,0097 |
-0,0041 |
-0,0037 |
-0,0045 |
-0,0053 |
-0,0059 |
-0,0069 |
-0,007 |
-0,0066 |
| Ризб,
атм |
1,22 |
4,55 |
12,34 |
27,51 |
38,44 |
36,52 |
30,12 |
30 |
26,23 |
| М |
1,125 |
2,003 |
3,2 |
4,737 |
5,501 |
5,391 |
4,865 |
4,801 |
4,579 |
| fар
,Гц |
3,59 |
3,59 |
6,885 |
10,75 |
13,06 |
13,695 |
12,96 |
12,2 |
11,57 |
| α0
δ
|
1,789 |
2,172 |
2,431 |
1,873 |
12,443 |
12,323 |
12,09 |
12,199 |
12,513 |
| Н, м |
89,49 |
265,04 |
632,19 |
1180,69 |
1711,89 |
2356,9 |
6546,11 |
9875,16 |
13652 |
| V, м/с |
336,48 |
599,17 |
959,85 |
1416,93 |
1645,53 |
1615,12 |
1459,93 |
1375,73 |
1308,21 |
t, с
|
0,6 |
1,0 |
1,5 |
2,0 |
2,36 |
2,8 |
5,8 |
8,3 |
11,58 |
Таблица 1.8 ,Т = +50°С
| сэнерг
|
-4,638 |
-1,637 |
-7,665 |
-8,449 |
-8,25 |
-7,678 |
-7,434 |
| Pcт
|
1,02 |
1,0 |
0,91 |
0,76 |
0,465 |
0,25 |
0,14 |
Мнr
,
Кг/см
|
-3,06 |
-5,05 |
-46,41 |
-39,14 |
-23,85 |
-12,85 |
-7,2 |
Мн
, Кг/см
|
-3 |
-5,05 |
-51 |
-51,5 |
-51,3 |
51,4 |
-51,45 |
| kσ
|
-0,0092 |
-0,004 |
-0,0037 |
-0,0037 |
-0,00375 |
-0,00374 |
-0,00373 |
| Ризб,
атм |
1,27 |
5,05 |
33,2 |
35,1 |
33,2 |
33,8 |
34 |
| М |
1,25 |
2,08 |
5,14 |
5,27 |
5,14 |
5,16 |
5,23 |
| fар
,Гц |
5,31 |
4,64 |
14,28 |
16,48 |
15,28 |
14,45 |
14,06 |
| α0
δ
|
1,905 |
2,118 |
1,693 |
12,340 |
12,248 |
12,227 |
12,189 |
Н, м
|
75,86 |
188,17 |
1070,28 |
2832 |
6996 |
11684,2 |
14688,03 |
| V, м/с |
445,7 |
748,9 |
1865,6 |
1841,3 |
1713,5 |
1619,5 |
1578,5 |
| t, с |
0,4 |
0,6 |
1,3 |
2,3 |
4,8 |
7,8 |
9,8 |
Из полученных расчетных данных определим режимы полета, на которых будем в дальнейшем производить расчеты конструктивных и обобщенных параметров, проводить тепловой расчет.
Конструктивный расчет Sn
l будем определять на режиме, где параметр kσ,
характеризующий соотношения момента нагрузки и развиваемого момента имеет экстремум.
kσ
= 0,0098 при , T = -5O°C, t = O,6 c.
Расчет потребной скорости будем проводить на режиме, где энергетическая функция сэ
имеет экстремум, или, другими словами, где потребная мощность максимально приближена к развиваемой мощности привода.
сэ
= 11,57 при 0 = 70°, Т =-50° С, t = 5,8 с.
Тепловой расчет будем проводить на режиме, где достигается максимальная скорость полета: ,Т = +50°С.
1.5 Расчет обобщенных и конструктивных параметров
Расчет конструктивного параметра Sn
l.
Расчет конструктивного параметра будем проводить, исходя из обеспечения допустимого значения  по зависимости: по зависимости:
 (1.5.1) (1.5.1)
Sn
- площадь поршня,
1 – плечо,
 - максимальный относительный перепад давлений, - максимальный относительный перепад давлений,
где Рn1,2
- давление в рабочих полостях.
Для распределительного устройства типа "струйная трубка" можно принять  kσ
находится как экстремум функции kσ
=
0,0098. kσ
находится как экстремум функции kσ
=
0,0098.
ξ- коэффициент, учитывающий утечки в полостях и потери в системе ξ=0,9
 м3 м3
Принимаем Sn
l
= 9-10-6
м3
= 9 см3
.
Расчет развиваемого момента.
Расчет развиваемого момента будем проводить, исходя из следующего соотношения:
 (1.5.2) (1.5.2)
 , ,
Р
ИЗб
выбирается для экстремума сэнерг
сэнерг
= -11,57, Ризб =12,41 атм.
Тогда Мт
= 9 • 0,75 • 12,41 = 83,8 кг/см.
Зная момент нагрузки Мт
= 25,02 кг- см, можно определить значение параметра σ:
σ= 
Отсюда видно, что σ < σ доп
при σдоп
= 0,4.
Расчет потребной и максимальной скорости.
Расчет потребной скорости будем проводить, исходя из отработки угла δ0
на частоте f при действии нагрузки, по зависимости
 (1.5.3) (1.5.3)
где δ0
= δm
- угол отклонения рулей, δ0
= 0,44 рад.
Параметр  для газораспределительного устройства типа "струйная трубка" можно принять 1;
для газораспределительного устройства типа "струйная трубка" можно принять 1;
ω = 2 •f = 2• fвр
1,5 + 2•1,5 + 2•1,5 - круговая частота вращения объекта рассчитывается с учетом разброса на конструктивные параметры и частоты управления. •f = 2• fвр
1,5 + 2•1,5 + 2•1,5 - круговая частота вращения объекта рассчитывается с учетом разброса на конструктивные параметры и частоты управления.
ω =2• 12,96•2• 1,5• 2• 1,5 = 100 с-1
,
 = 59,5 рад/с. = 59,5 рад/с.
Максимальная скорость находится из следующего соотношения:
 (1.5.4) (1.5.4)
где  - коэффициент, учитывающий разброс конструктивных параметров, - коэффициент, учитывающий разброс конструктивных параметров,  = 1,15; = 1,15;
k
тр
=
0,9- коэффициент, учитывающий трение,
 рад /с. рад /с.
Расчет эффективной площади выходного отверстия ГРУ.
Эффективная площадь выходного отверстия газораспределительного устройства может быть определена из зависимости для определения максимальной скорости:
 (1.5.5) (1.5.5)
где Т
п
- температура рабочего тела в полости, Тп
= 900 К,
Y
- газодинамическая функция расхода, Y
= 1 при Р
изб = 12,41 атм.
R, kо
- параметры, характеризующие рабочее тело,
kо
- показатель адиабаты, kо
= 21,4,
R
- универсальная газовая постоянная R
= 2927 кг. см / кг-К
Эффективная площадь выходного отверстия ГРУ будет равна:

Эффективная площадь входного отверстия ГРУ будет равна:

 - коэффициент расхода, - коэффициент расхода, = 0,85÷0,9. - коэффициент расхода, - коэффициент расхода, = 0,85÷0,9.
Выходные и входные площади отверстий ГРУ будут равны, соответственно:
Sвых
= 0,024 см2
; SBX
= 0,021 см2
.
1.6 Описание конструкции РП
В состав двухканального РП входят две рулевые машины, обеспечи-вающие управление каждым каналом, шпангоут с двумя парами аэродинамических рулей, воздухозаборник, теплоотборник, блок усилителей, конструктивно располагающийся в электронной аппаратуре ракеты.
Разработанный привод представляет собой пропорциональный рулевой привод, использующий энергию набегающего потока воздуха с исполнительным релейным двигателем двухстороннего действия и распределительным устройством "струйная трубка".
Поршень исполнительного двигателя имеет уплотнения, обеспечивающие плотное прилегание поршня к стенкам цилиндра, что обеспечивает отсутствие перетекания между полостями. Уплотнение поршня комбинированное состоит из фторопластовых колец, подпружиненных изнутри воротничковыми манжетами.
Основными сборочными единицами РП являются шпангоут и рулевые машины.
В шпангоуте на подшипниках качения установлены аэродинамические рули. На шпангоут с помощью винтов крепятся с двух сторон рулевые машины. Поступательное движение штока рулевой машины преобразуется во вращательное движение рулей посредством промежуточной тяги.
В состав рулевой машины входит силовой цилиндр двухстороннего действия, поршень с уплотнениями, потенциометрический датчик обратной связи, распределительное устройство. Распределительное устройство состоит из поворотного сопла, закрепленного на оси управляющего электромагнита и неподвижного приемника, который имеет два прямоугольных окна, связанные через подводные каналы с полостями рабочего цилиндра.
При торможении воздушного потока от элемента конструкции привода выделяется большое количество тепла, в результате чего конструкция нагревается. Поэтому необходимо использовать материалы для изготовления, способные выдерживать высокую температуру. Носовой обтекатель будет изготавливаться из цинко-молибденового сплава ЦМ-2А, аэродинамические рули из хромо-никелевого сплава ЖСБК~Ви. Остальные детали конструкции, менее подверженные тепловому воздействию будут изготавливаться из нержавеющей стали. Для охлаждения воздуха, попадающего через воздухозаборник в рабочие полости, в передней части РП установлен теплоотборник, состоящий из тонких металлических трубок, проходя через которые, воздух охлаждается.
1.7 Тепловой расчет
Тепловой расчет конструкции проводится после предварительной компоновки РП по алгоритму, приведенному на рис. 1.7 в следующем порядке:
1) определяется температура газа на входе в воздухозаборное устройство
Твх
=Та
(1+0,2М2
);
2) по первоначально выбранному qj
, определяется температура рабочего тела в j-том элементе конструкции

3) определяются параметры  , , , ,

4) рассчитывается критерий Био:
5) определяются коэффициенты уравнений для расчета температуры рабочего тела и стенок конструкции j-того элемента:
 ; ;
 ; ;
 ; ;


 ; ; 
 ; ;
 ; ;
 ; ;
 ; ;
 ;
;

6) рассчитывается параметр 
 ; ;
Если отличие заданного значения  и рассчитанного составляет более 15%, то проводится повторный расчет, и в качестве берется рассчитанное значение и рассчитанного составляет более 15%, то проводится повторный расчет, и в качестве берется рассчитанное значение  . .
Результаты расчета тепловых процессов используются для уточнения обобщенных параметров привода и выбора материалов конструкции.
Алгоритм расчета температур рабочего тела и стенок конструкции

Рис 1.7.1
По приведенным выше математическим моделям рассчитаны параметры силовой и управляющей частей РП, управляющего электромагнита и температуры рабочего тела.
В качестве расчетных выбраны режимы (рис. 1.7, 1.8):
1) для расчета Sn
l - режим, соответствующий экстремуму kσ
:
 , Та
=223 К, t = 0,6 c, М=1,124, Рн
=1,22ּ105
Па , Та
=223 К, t = 0,6 c, М=1,124, Рн
=1,22ּ105
Па
kσmin
= - 0,0094, xов
= 61мм, Мн
= - 0,324 Нм, fвp
= 3,6 Гц;
2) для расчета требуемой скорости и размеров распределительного устройства - режим, соответствующий экстремуму Сэ
:
 , Та
=323 К, t = 4,8 c, М=5,014, Рн
=18,2ּ105
Па, Хов
= 61 мм , Та
=323 К, t = 4,8 c, М=5,014, Рн
=18,2ּ105
Па, Хов
= 61 мм
Мн
= -3,68 Нм, fвp
= 15,1 Гц. Н = 5200 м, Твх
= 1748 К, Δfвр
= 3,0 Гц,
fy
= 1,0 Гц, Сmin
=-1,8;
3) для расчета управляющей части - режим, на котором имеют место максимальные фазовые сдвиги на рабочих частотах:
, Та
= 323 К, t = 9,8 с, М = 5,23, Ри
= 4,98ּ105
Па, Хов
= 61 мм, Мн
= = - 0,916 Нм, fвp
= 14,06 Гц, Н = 14686 м, Твх
= 1475 К, Δfвp
= 2,8 Гц, fy
= 1,0 Гц;
4) для расчета тепловых процессов - режим, на котором имеют место максимальные температуры потока воздуха в воздухозаборнике:
 , Та
= 323 К, t = 1,38 с, Мmах
= 5,308, Ра
= 35,7·105
Па, Н = 0, , Та
= 323 К, t = 1,38 с, Мmах
= 5,308, Ра
= 35,7·105
Па, Н = 0,
Твхmах
= 2132 К.
При bρ
= 9,7 10-2
м, Sp
= 28,3ּ10-4
м2
, Δρm
= 0,75, σдоп
= 0,4, ξ= 0,4, δm
= =0,436 рад,
Тп
= 920 К.
получены следующие основные конструктивные и обобщенные параметры исполнительного двигателя:
произведение площади поршня на плечо Sn
l, м3
...............9,0ּ10-6
;
плечо 1, м..........................................................................1,05 10-2
;
требуемая скорость Ω,
1/с...............................................76,03.
эффективная площадь истечения из рабочей полости
µSвых
, м2
........................................................................... 2,00 10-6
;
эффективная площадь втекания в рабочую полость,
µSвх
, m2
............................................................................. 1,8 10-6
.
Зависимости параметра kσ
времени для различных режимов работы

Рис 1.7.2
Зависимость энергетической функции от времени для различных режимов работы

Рис 1.7.3
В конструкции реализовано Sn
l = 10,0-10-6
м3
.
В результате расчета управляющей части РП при  = 6, = 6,  = 88,3с-1
, = 88,3с-1
,
 , ,  = 0,0393 рад, = 0,0393 рад,  = -20°, = -20°,  = 76,4 с-1
, Мрп
, = 3,36 Нм, J = 0,000025 кгм2
, f = 0,001 Нмс, Мстр = 0,15 = 76,4 с-1
, Мрп
, = 3,36 Нм, J = 0,000025 кгм2
, f = 0,001 Нмс, Мстр = 0,15
Нм определены параметры и структура привода:
частота автоколебаний  , 1/с.................................... 530 , 1/с.................................... 530
амплитуда автоколебаний δа
,рад................................ 0,277
время эквивалентного запаздывания УЭМ tэy
M, с.......0,0016
величина зоны неоднозначности релейного усилителя, приведенная к
выходу ДОС Uв
........................................................ 1,0
параметр корректирующего фильтра Ск
.................... 1,76
амплитудная характеристика разомкнутого РП Ар
(). 2,505
фазовая характеристика замкнутого )
.........минус 20°
Для реализации Ск
= 1,76 использован корректирующий фильтр с передаточной функцией вида:
 ; ;
где: Ti
= 0,004 с, Тг
= 0,012 с.
Основные параметры управляющего электромагнита, рассчитанные из условия обеспечения времени эквивалентного запаздывания tэ
= 0,0016 с принапряжении питания Un
= 30 В, угле поворота = 0,0393 рад и максимальном допустимом токе потребления на канал Jд
≤ 0,8 А, следующие:
сопротивление обмотки при 20°С Rо
, Ом...................62±3;
число витков W, не менее....................................... 900;
провод ПЭТВ-0,112;
плечо якоря lя
, м............................................... 1,15-10-2
;
площадь якоря Sa
, м2
........................................... 0,2-10-4
;
площадь минимального сечения магнитопровода, м2
.... 0,2-10-4
;
эквивалентная длина магнитопровода lст
, м............0,675-10";
жесткость пружины Спр
, Нм/рад..............................1,7.
Время срабатывания рассчитанного УЭМ не более 0,002 с. Температура рабочего тела в трубопроводе ТТ
, теплоотборнике Тф
, рабочих полостях Тп
стенок Тст
, Тсф
, Тсп
для наиболее тяжелого с точки зрения нагрева режима превышают допустимых для легированных жаропрочных сталей, рис. 1.9. Расчет проведен при следующих исходных данных:
 = 0,03-10-4
м2
, FT
= 14,1-10-4
м2
, t = 1,38 с, Твх
= 2132 К, Рвх
= 36-105
Па, R = 29,27 Дж/(Н-К), k = 1,4, = 0,03-10-4
м2
, FT
= 14,1-10-4
м2
, t = 1,38 с, Твх
= 2132 К, Рвх
= 36-105
Па, R = 29,27 Дж/(Н-К), k = 1,4,  , ,  = 8,51Вт-м/(НּК), = 8,51Вт-м/(НּК),
 = 0, JT
= 0,015 кг, Ст
= 1087 Дж/(кг-К), αоф
= 63,85Вт-м/(Н-К), = 0, JT
= 0,015 кг, Ст
= 1087 Дж/(кг-К), αоф
= 63,85Вт-м/(Н-К),
 = 0,03-10-4
м2
, Рф
= 203-10-4
м2
, Jф
= 0,174 кг, Сф
= 627 Дж/(кг-К), Вiф
= 0 = 0,03-10-4
м2
, Рф
= 203-10-4
м2
, Jф
= 0,174 кг, Сф
= 627 Дж/(кг-К), Вiф
= 0
 = 0, Рф
= 34 -105
Па, = 0, Рф
= 34 -105
Па,  = 0,02-10-4
м2
, = 0,02-10-4
м2
,  = 21,28 Вт-м/(Н-К), Рп
= 20-105
Па, Fn
= 14,94- 10-4
м2
, = 21,28 Вт-м/(Н-К), Рп
= 20-105
Па, Fn
= 14,94- 10-4
м2
,  = 420 Вт/(м2
- К). = 420 Вт/(м2
- К).
Проведенный тепловой расчет показал, что прогрев элементов конструкции достаточно высок, и необходимо при конструктивной проработке экспериментальных исследованиях обратить особое внимание на следующие "слабые" места в конструкции:
1) зазор между струйником и приемником из-за линейного удлинения струйника Δlc
= 0,09 мм должен быть не менее 0,11- 0,12мм;
2) возможно нарушение целостности уплотнений по поршню и перетекание воздуха из полости в полость;
3) обмотки управляющего электромагнита, датчик обратной связи и монтаж должны быть защищены от воздействия горячего воздуха;
4) ленточный кабель должен быть теплоизолирован;
5) теплоотборник должен быть изолирован от обтекателя и иметь максимальную массу;
6) рабочий воздушный поток следует тормозить на входе теплоотборника;
7) пайки проводников следует по возможности заменить на сварку, промежуточные пайки исключить;
8) должен быть продолжен поиск новых обмоточных и монтажных проводов в случае увеличения времени работы привода, используемые в данной конструкции на пределе возможностей.
Зависимости температур стенок конструкции РП и воздуха на его входе от времени

Рис 1.7.4
1.8 Математическая модель рулевого привода
Для проектирования управляющей части и для расчета динамических характеристик привода будем использовать модель РП, состоящую из следующих элементов:
1. Исполнительный двигатель, описываемый следующей системой
уравнений:
 , ,
где  ; ;
2.Сумматор:
ΔU = Uвх
– Uос
3. Релейный элемент:
Uв
- зона триггера,
Up
- максимальное значение релейного усилителя.
4. Управляющий электромагнит:
τ - время эквивалентного запаздывания.
5. Корректирующий фильтр.
6. Датчик обратной связи: kос
= 1 В/рад.
Структурная схема такого привода будет иметь вид, представленный на рисунке:

Рис 1.8 Структурная схема РП.
1.9 Расчет автоколебательной системы ВДРП и ее динамических характеристик
Расчет автоколебательной системы воздушно-динамического РП проведем по следующему алгоритму:
1. Рассчитаем частоту автоколебаний:
 (1.9.1)
(1.9.1)
где  = 6÷10; = 6÷10;
 -
круговая частота, находится для режима наименьшей точности: -
круговая частота, находится для режима наименьшей точности:
 = 70°, Т = +50°,
= 2πf = 2π 14,06 = 88,3 рад/с.
= 70°, Т = +50°,
= 2πf = 2π 14,06 = 88,3 рад/с.
Примем
= 6, тогда
= 6ּ88,3 = 530 рад/с/
2. Определим требуемое время эквивалентного запаздывания управляющего электромагнита:
 (1.9.2)
(1.9.2)
где φнел
- фазовая характеристика нелинейного элемента,
φнел
= - arcsin λ, λ. = 0,1 ÷0,15;
φк
 -
фазовая характеристика корректирующего фильтра на частоте автоколебаний; -
фазовая характеристика корректирующего фильтра на частоте автоколебаний;
 ; ;
φп
 -
фазовая характеристика привода на частоте автоколебаний; -
фазовая характеристика привода на частоте автоколебаний;
φк
= arctg 
Найдем передаточную функцию привода:


 ; ;
 ; ;  ; ;  ; ; 
 ; ; ; ;  ; ;  ; ;
 ; ; ; ;
 ; ; ; ;
 ; ; ; kn
= ; kn
= $ $

 ; ;  ; ;
Определим фазово-частотную характеристику привода при следующих данных:  кг/см = 3,3Нּм; кг/см = 3,3Нּм;  кг/см = 0,72 Нּм; кг/см = 0,72 Нּм;  рад/с; f = 0,01 кгּ смּc рад/с; f = 0,01 кгּ смּc  Нּмּc2
; Нּмּc2
; = =0,0436 рад; = =0,0436 рад;  = 0,44 рад. = 0,44 рад.
 ;
; 




Время эквивалентного запаздывания электромагнита:

без влияния корректирующего фильтра.
3. Рассчитаем амплитуду автоколебаний по зависимости:
 (1.9.3) (1.9.3)
 - амплитудная характеристика привода на частоте автоколебаний. - амплитудная характеристика привода на частоте автоколебаний.
 ; ;  =4,08 =4,08
tо
- время движения якоря электромагнита от упора до нейтрального положения, tо
= 1,15 мс;
 =0,21 рад =120 =0,21 рад =120
4. Определим потребную амплитудную характеристику разомкнутого привода на рабочей частоте из условия обеспечения требуемого фазового сдвига замкнутого рулевого привода.
 , (1.9.4) , (1.9.4)
где 
 - фазовая характеристика электромагнита на рабочей частоте; - фазовая характеристика электромагнита на рабочей частоте;
 - фазовая характеристика нелинейного элемента - фазовая характеристика нелинейного элемента  ; ;
 - фазовая характеристика привода на рабочей частоте; - фазовая характеристика привода на рабочей частоте;
 ; ;  = - 0,28; = - 0,28;  =0,076; =0,076;
 -74,80
= 1,3 рад
; -74,80
= 1,3 рад
;  = 88,3·2,3·10-3
= - 0,2 рад
= - 11,50 = 88,3·2,3·10-3
= - 0,2 рад
= - 11,50
 = -74,8-11,5 = -86,30 = -74,8-11,5 = -86,30
Потребная амплитудная характеристика разомкнутого привода на рабочей частоте будет равна:

5. Определим необходимость установки корректирующего фильтра:
 , (1.9.5) , (1.9.5)
где  ; ;  ; ; 
 ; ;
 ; ;  =1,065 =1,065
 ; ;  . .
Так как ск
> 1, то делаем вывод о том, что необходимо ставить корректитрующий фильтр.
7. Ставим корректирующий фильтр вида  , ,
где постоянные времени определим по зависимости:
 ; ;  ; ;  , ,
тогда  , ,  . .
Определим фазовую характеристику фильтра на рабочей частоте:
 ; ;
 ; ;
 ; ; ; ; ; ; ;
;
 . .
Амплитудная характеристика фильтра на рабочей частоте:
 . .
Фазовая характеристика фильтра на частоте автоколебаний:
   ; ;
Амплитудная характеристика фильтра на частоте автоколебаний:

Определим параметр корректирующего фильтра на частоте автоколебаний:
ск
Значит, выбранный параметр подходит для системы.
Определим амплитудно-фазовые характеристики системы с учетом корректирующего фильтра. Расчет произведем по следующим зависимостям:
 ; ;
 ; ;
tg
 = - 104,70
; = - 104,70
;
 ; ;
tg = - 0,354; = - 19,40
. = - 0,354; = - 19,40
.
Так как полученный фазовый сдвиг на рабочей частоте удовлетворяет требованиям, то выбранный фильтр подходит для системы.
8. Теперь необходимо рассчитать и построить динамические характеристики привода для различных режимов работы и при различных входных сигналах. Для расчета динамических характеристик воспользуемся программой, предназначенной для расчета амплитудно-фазовых характеристик замкнутой системы. Для каждого режима будем считать динамические характеристики при трех различных входных сигналах: Uвx1
= 0,088 рад; U вx2
= 0,314рад; U вx2
= 0,44 рад.
1 режим:  ; Т = +50° С; t = 9,8 с; f = 14,06 Гц, Ωм
= 65,6 рад/с; ; Т = +50° С; t = 9,8 с; f = 14,06 Гц, Ωм
= 65,6 рад/с;
Мm
= 3,3 Н•м; Мн
= 0,72 Н•м; Ризб
= 4,85 атм; w
0
= 88,3 рад/с.
Рассчитаем необходимые данные для ввода:
Результаты расчета приведены в таблицах 1.9.1-1.9.3.
Таблица 1.9.1
| UBX
= 0,088 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 8 |
1,7 |
0,94 |
-0,54 |
-10,9 |
| 10 |
1,8 |
0,96 |
-0,35 |
-13,5 |
| 12 |
1,88 |
0,97 |
-0,26 |
-16,2 |
| 14,06 |
1,95 |
0,98 |
-0,175 |
-17,7 |
| 16 |
2 |
0,99 |
-0,09 |
-21 |
Таблица 1.9.2
| Uвх
= 0,314 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 8 |
1,7 |
0,94 |
-0,54 |
-9,5 |
| 10 |
1,8 |
0,96 |
-0,35 |
-11 |
| 12 |
1,88 |
0,96 |
-0.35 |
-9,8 |
| 14,06 |
1,95 |
0,99 |
-0,09 |
-10 |
| 16 |
2 |
1,01 |
0,09 |
-15 |
| Таблица |
1.9.3 |
| Uвх = 0,44 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 8 |
1,7 |
0,98 |
-0.175 |
-5,4 |
| 10 |
1,8 |
0,984 |
-0,14 |
-7,7 |
| 12 |
1,88 |
0,987 |
-0.113 |
-11,1 |
| 14,06 |
1,95 |
0,95 |
-0,45 |
-13 |
| 16 |
2 |
0,966 |
-0,3 |
-9,4 |
2 режим: = 70°; Т = -50° С; t = 0,6 с; f = 3,59 Гц,  = 65,631,5 рад/с; Мт
= 0,82 Н•м; Мн
= 0,324 Н•м; Ризб
= 1,22 атм; w
0
= 22,57 рад/с, Тн
= 4,5-10-3
с, = 65,631,5 рад/с; Мт
= 0,82 Н•м; Мн
= 0,324 Н•м; Ризб
= 1,22 атм; w
0
= 22,57 рад/с, Тн
= 4,5-10-3
с,  = 0,15, = 0,15,  = 722,5. = 722,5.
Результаты расчета приведены в таблицах 1.9.4-1.9.6.
Таблица 1.9.4
| UBX
= 0,088 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 1,6 |
1,0 |
0,88 |
-1,11 |
-3,5 |
| 2.5 |
1,2 |
0,9 |
-0,91 |
■5,7 |
| 3.59 |
1,35 |
0,91 |
-0,82 |
-9,08 |
| 4 |
1,4 |
0,916 |
-0,76 |
-9,3 |
| 6,33 |
1,6 |
0,93 |
-0,63 |
-15,2 |
Таблица 1.9.5
| UBX
= 0,314 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 1,6 |
1,0 |
0,88 |
-1,11 |
-3,2 |
| 2,5 |
1,2 |
0,9 |
-0,92 |
-5,3 |
| 3,59 |
1,35 |
0,91 |
-0,82 |
-7,3 |
| 4 |
1,4 |
0,914 |
-0,78 |
-7,6 |
| 6,33 |
1,6 |
0,95 |
-0,44 |
-9,3 |
Таблица 1.9.6
| Ubx
= 0,44 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 1.6 |
1,0 |
0,9 |
-0,92 |
-3,0 |
| 2,5 |
1,2 |
0,93 |
-0,63 |
-4,8 |
| 3,59 |
1,35 |
0,95 |
-0,44 |
-5,6 |
| 4 |
1,4 |
0,97 |
-0,26 |
-5,4 |
| 6,33 |
1,6 |
1,016 |
-0,14 |
-8,7 |
3 режим: = 70°; Т = -50°С; t = 11,58 с; f = 11,57 Гц, = 59,6 рад/с;
Мт
= 2,49 Н•м; Мн
= 0,764 Н•м; Ризб
= 3,699 атм;
w0
= 72,76 рад/с,  = 0,307, mт
= 1,74, Тс
= 0,024с, Тг
= 0,0074с, = 0,307, mт
= 1,74, Тс
= 0,024с, Тг
= 0,0074с,
Тн
= 2,9 -10-3
с, = 0,098, kΩ
= 1367.
Результаты расчета приведены в таблицах 1.9.7-1.9.9.
Таблица 1.9.7
| Ubx
= 0,088 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 4 |
1,4 |
0,87 |
-1,2 |
-6,8 |
| 6,33 |
1,6 |
0,89 |
-1,01 |
-10,7 |
| 10.04 |
1,8 |
0,918 |
-0,74 |
-16,5 |
| 11,5 |
1,85 |
0,93 |
-0,63 |
-19,0 |
| 15,9 |
2 |
0,96 |
-0,35 |
-20,8 |
| Таблица 1.9.8 |
| Ubx
=
0,314 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 4 |
1,4 |
0,88 |
-1,11 |
-6,6 |
| 6,33 |
1,6 |
0,9 |
-0,91 |
-10,1 |
| 10.04 |
1,8 |
0,94 |
-0,54 |
-12,4 |
| 11,5 |
1,85 |
0,943 |
-0,51 |
-13,3 |
| 15,9 |
2 |
1,023 |
-0,19 |
-18,7 |
| Таблица 1.9.9 |
| Ubx
=
0,314 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 4 |
1,4 |
0,93 |
-0,63 |
-4,8 |
| 6,33 |
1,6 |
0,94 |
-0,53 |
-7,8 |
| 10.04 |
1,8 |
0,97 |
-0,26 |
-11,3 |
| 11,5 |
1,85 |
1,0 |
0 |
-15,2 |
| 15,9 |
2 |
1,04 |
0,34 |
-7 |
= 70°; Т = -50°С; t = 11,58 с; f = 11,57 Гц, = 59,6 рад/с;
Мт
= 2,49; Мн
= 0,764 Н•м; Ризб
= 3,699 атм;
w0
= 72,76 рад/с, = 0,307, mт
= 1,74, Тс
= 0,024с, Тг
= 0,0074с,
Тн
= 2,9 -10-3
с, = 0,098, = 1367.
4 режим:  = 0°; Т = +50°С; t = 1,5 с; f = 13,75Гц, = 58,02 рад/с; = 0°; Т = +50°С; t = 1,5 с; f = 13,75Гц, = 58,02 рад/с;
Мт
= 30,05 Н•м; Мн
= 4,8 Н•м; Ризб
= 44,53 атм;
w
о
= 86,4 рад/с, = 0,16, mm
= 10,9, Тс
= 0,047с, Тг
= 0,0076с,
Тн
= 1,17-10-3
с, = 0,04, kΩ
= 1331.
Результаты расчета приведены в таблицах 1.9.10-1.9.12.
Таблица 1.9.10
| Ubx
=
0,088 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 4 |
1,4 |
0.96 |
-0,35 |
-3,6 |
| 6,33 |
1,6 |
0,98 |
-0,175 |
-5,05 |
| 10.04 |
1,8 |
1,01 |
0,086 |
-6,2 |
| 11,5 |
1,85 |
1,05 |
0,42 |
-5,9 |
| 15,9 |
2 |
1,063 |
0,53 |
-6,14 |
Таблица 1.9.11
| Ubx
=
0,314 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 4 |
1,4 |
0,98 |
-0,175 |
-1,5 |
| 6,33 |
1,6 |
0,99 |
-0,087 |
-2,2 |
| 10.04 |
1,8 |
1,01 |
0,086 |
-4,6 |
| 11,5 |
1,85 |
1,03 |
0,26 |
-6,7 |
| 15,9 |
2 |
1,033 |
0,28 |
-8,6 |
Таблица 1.9.12
| Ubx
= 0,44 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 4 |
1,4 |
0,98 |
-0,175 |
-1,32 |
| 6,33 |
1,6 |
1,0 |
0 |
-2,65 |
| 10.04 |
1,8 |
1,0 |
0 |
-5 |
| 11,5 |
1,85 |
1,01 |
0,086 |
-8,4 |
| 15,9 |
2 |
1,03 |
0,256 |
-6,6 |
5 режим: = 70°; Т = -50°С; t = 5,8 с; f = 12,96 Гц, =
55 рад/с;
Mffl
= 8,38 Н•м; Мн
= 2,502 Н • м; Ризб
= 12,41 атм;
w
0
= 81,4 рад/с, σ = 0,3, mm
= 5,686, Тс
= 0,0267с, Тг
= 0,008с,
Тн
= 1,16 -10'3
с, ζ =
0,054, кΩ
= 1261,5.
Результаты расчета приведены в таблицах 1.9.13-1.9.15.
Таблица 1.9.13
| UBX
= 0,088 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 6,33 |
1,6 |
0,94 |
-0,54 |
-7,8 |
| 7,98 |
1,7 |
0,95 |
-0,44 |
-10 |
| 10,04 |
1,8 |
0,96 |
-0,35 |
-13,2 |
| 12,95 |
1,9 |
0,98 |
-0,175 |
-18,2 |
| 15,9 |
2 |
1,0 |
0 |
-21,8 |
Таблица 1.9.14
| UBX
= 0,314 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 6,33 |
1,6 |
0,94 |
-0,54 |
-6,6 |
| 7,98 |
1,7 |
0,96 |
-0,35 |
-7,8 |
| 10,04 |
1,8 |
1,0 |
0 |
-6,4 |
| 12,95 |
1,9 |
1,0 |
0 |
-9,8 |
| 15,9 |
2 |
1,01 |
0,086 |
-12,5 |
Таблица 1.9.15
| UBX
= 0,314 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 6,33 |
1,6 |
0,98 |
-0,175 |
-4,6 |
| 7,98 |
1,7 |
1,0 |
0 |
-5,3 |
| 10,04 |
1,8 |
1,0 |
0 |
-7,6 |
| 12,95 |
1,9 |
1,02 |
0,172 |
-7,7 |
| 15,9 |
2 |
1,04 |
0,34 |
-17,9 |
6 режим: = 0°; Т = -50°С; t = 10,1 с; f = 7,5 Гц, = 58,055,92 рад/с;
Mm
= 15,3 Н•м; Мн
= 3,75 Н•м; Ризб
= 22,69 атм;
w
0
= 47,12 рад/с; σ = 0,245; mm
= 8,52; Тс
= 0,032с;
Тг
= 0,00787с, Тн
= 1,33 •10-3
с, ζ
= 0,044, кΩ
= 1282.
Результаты расчета приведены в таблицах 1.9.16-1.9.18.
Таблица 1.9.16
| UBX
= 0,088 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 4 |
1,4 |
0,94 |
- 0,54 |
- 4,4 |
| 6,33 |
1,6 |
0,95 |
- 0,44 |
- 7,2 |
| 7,5 |
1,7 |
0,96 |
- 0,35 |
- 8,7 |
| 10,04 |
1,8 |
0,97 |
- 0,26 |
- 12,3 |
| 15,9 |
2 |
1,005 |
0,04 |
- 21,5 |
Таблица 1.9.17
| UBX
= 0,314 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 4 |
1,4 |
0,95 |
- 0,44 |
- 3,84 |
| 6,33 |
1,6 |
0,98 |
- 0,175 |
- 3,6 |
| 7,5 |
1,7 |
0,987 |
- 0,114 |
- 3,16 |
| 10,04 |
1,8 |
1,0 |
0 |
- 5,4 |
| 15,9 |
2 |
1,0 |
0 |
- 10,7 |
Таблица 1.9.18
| UBX
= 0,44 рад |
| f, Гц |
lgw |
Азам
|
Lзам,
дБ |
φзам
,0
|
| 4 |
1,4 |
0,98 |
- 0,175 |
- 2,98 |
| 6,33 |
1,6 |
0,99 |
- 0,09 |
- 2,8 |
| 7,5 |
1,7 |
1,0 |
0 |
- 4,5 |
| 10,04 |
1,8 |
1,0 |
0 |
- 6,7 |
| 15,9 |
2 |
1,06 |
0,5 |
- 12,8 |
По результатам расчета построим динамические характеристики привода на различных режимах.

Рис 1.9.1 Динамические характеристики привода.
1.10 Расчет управляющего электромагнита
Управляющий электромагнит рассчитывается из условия обеспечения полученного при проектировании управляющей части РП значения времени эквивалентного запаздывания t^ при учете ограничений по габаритам и потребляемому току по алгоритму, приведенному на рис. 1.10.1.
Электромагнитный преобразователь состоит из управляющего электромагнита и усилителя мощности и является системой, для которой характерна глубокая взаимосвязь явлений в электрической, механической и магнитной подсистемах. Эта взаимосвязь не позволяет рассматривать каждый элемент системы в отдельности, так как система обладает свойствами отличными от свойств составляющих ее элементов. Для описания такой системы можно использовать метод, основанный на дифференциальных принципах. Для этого надо систему представить в виде схем замещения. Для построения схем замещения магнитной, электрической и механической цепи примем следующие допущения:
- реальная электромеханическая система заменяется идеализированной с сосредоточенными параметрами и представляется в виде схем замещения соответствующих цепей;
- намагничивающие силы обмоток считаем сосредоточенными;
- магнитные поля рассеяния и выпучивания учитываем с помощью эквивалентных магнитных сопротивлений;
- неоднозначность кривой намагничивания материалов магнитопровода пренебрегаем вследствие наличия в системе воздушных зазоров.

Рис 1.10.2 Конструктивная схема электромагнита

Рис 1.10.3 Схема замещения магнитной цепи.
Уравнение магнитной цепи будет иметь вид:
 ; ;
Расчет электромагнита проводим исходя из обеспечения требуемого времени эквивалентного запаздывания τэ
= 2,3 мс.
определим жесткость пружины по следующему соотношению:
 ; (1.10.1) ; (1.10.1)
где  - время отпускания, = kτ
ּ - время отпускания, = kτ
ּ  ; ;
kτ
= 0,45÷0,6;
= 0.5·0,0023 = 1,15ּ10-3
с;
Jн
– момент инерции нагрузки, Jн
=210-3
с;
 ; ;
 =87 =87
 = 2,17ּ10-7. = 2,17ּ10-7.
Примем с = 0,084 кгм/рад, тогда время отпускания будет равно:
 =0,001 с; =0,001 с;
Полученное значение времени отпускания меньше требуемого, поэтому жесткость пружины нас устраивает.
Определим развиваемый момент на половинном угле поворота якоря:
 ; (1.10.2) ; (1.10.2)
где k
н
коэффициент нагрузки, k
н
= 1,1.
 = 2,02 ּ10-3
кгּм. = 2,02 ּ10-3
кгּм.
Рассчитаем геометрические размеры магнитопровода:
 =0,01 м; =0,01 м;
 м, м,
 м, м,
 м, м,
 . .
Рассчитаем параметры обмотки.

 внутренний диаметр обмотки, внутренний диаметр обмотки,
 м, м,
 - высота катушки, - высота катушки,
 - толщина, - толщина,

 внешний диаметр катушки, внешний диаметр катушки,
 м, м,
Рассчитаем габаритные размеры электромагнита.
 , ,


Рассчитаем потребные ампер-витки.
 = 4,44( = 4,44( 0,5-0,0436)·(1+0,25) 0,5-0,0436)·(1+0,25)
· =1,16 =1,16
Рассчитаем обмоточные данные

W=
W=
Сопротивление обмотки определим по зависимости:
R =  ; ;
R =  = 80 Ом = 80 Ом
Номинальный ток в обмотке:
 =0,315 А =0,315 А
Максимальный ток в обмотке:
 = 0,48 А = 0,48 А
Анализ динамических характеристик, проведенных по нелинейной математической модели с использованием ЭВМ показал, что время эквивалентного запаздывания составляет 2 мс, а время срабатывания 2,5 мс, что удовлетворяет требованиям.
Динамические характеристики рассчитанного РП, определенные математическим моделированием с учетом допусков с вероятностью Р = 0,9973, составляют:
фазовые сдвиги РП при UBX
= 0 - 1,3 δт
изменяются от -5 до - 22°;
коэффициент передачи в линейной зоне К = 0,7 -1,1;
первая гармоника из выходного сигнала на рабочих частотах UBX
max
δ1
= (1,0-1,2) δm
уход нуля с момента начала управления Δδ ≤ 2,4°. Характеристики спроектированного рулевого привода соответствуют заданию на дипломный проект.
2. Технологическая часть
2.1 Разработка приспособления для проведения испытаний рулевых машин привода
Настройка и приемосдаточные испытания рулевых машин привода требуют подвода высокого давления к входным отверстиям, регистрации давления в рабочих полостях, подвода электрического питания к распределительному устройству. При этом машины рулевые должны быть надежно закреплены для обеспечения безопасности испытателей. Для реализации данных условий разработано приспособление для испытания машин рулевых.
Приспособление состоит из корпуса поз.1, в который вставляется машина рулевая и который имеет канал для подвода рабочего давления к рулевой машине второго канала. Корпус располагается на рабочем столе испытателя. Для обеспечения подвода электрического питания и подвода трубопроводов к проверочным отверстиям цилиндров верхняя часть корпуса среза и заменена тягами поз.З. На тягах устанавливается оправа поз.5, которая гайками поз.8 прижимается к корпусу машины рулевой для ее надежной фиксации на корпусе поз.1.
Данное приспособление универсальное. На нем можно проверять и настраивать как машину рулевую первого канала, так и машину рулевую второго канала. При установке в приспособление машины рулевой второго канала рабочее давление подается через отверстие в корпусе поз.1, в которое ввернут штуцер поз.2 и далее через трубу поз. 10.
Для подачи давления в машину рулевую первого канала на оправе поз.5 в подвижном стопоре поз.7 установлен штуцер поз. 12. Штуцер поз. 12 может поворачиваться на стойке поз.6 при отвернутом винте поз. 14 для установки машины рулевой в приспособление. При этом в приспособлении трубы поз. 10 устанавливается заглушка поз. 11.
Тяги поз.З также соединены с корпусом поз. 1 посредством осей поз.4, что позволяет отклонять их для удобства установки машины рулевой в корпус поз. 1. При необходимости корпус поз. 1 закрепить на рабочем столе.
Приспособление простое в изготовлении, компактное, устанавливается на небольшом пространстве в непосредственной близости от сети высокого давления, регистрирующих приборов и электрического питания. Оно легко переносится. В тоже время все детали стальные - что обеспечивает большой ресурс и не требует специальных требований при работе с ним. Оно обеспечивает дистанцию между испытываемой рулевой машиной и испытателем, что при возникновении нештатной ситуации не приведет к производственным травмам.
Установка и, снятие рулевой машины с приспособления не требует значительного времени.
2.2 Порядок работы с приспособлением
Порядок работы с машиной рулевой первого канала в приспособлении.
1. Установить в приспособление заглушку поз.11.
2. Отвернуть на 3...4 оборота гайки поз.8, отклонить тяги поз.З и установить машину рулевую в корпус поз. 1.
3. Закрепить машину рулевую с помощью оправки поз.5 и гаек поз.8. 4.Установить штуцер поз. 12 в машину рулевую и закрепить его на стопоре поз.7 с помощью винта поз. 14.
5. К штуцеру поз.*12 привернуть штуцер со шлангом сети высокого давления.
6. Из корпуса машины рулевой вывернуть заглушки поз.11 проверочных отверстий и подсоединить к проверочным отверстиям трубопроводы.от манометров.
7. Подсоединить электрические цепи питания и измерительные приборы.
8. Провести проверку и настройку машины рулевой согласно инструкции и сборочного чертежа.
9. Отключить сеть высокого давления и электрическое питание.
10. Отсоединить трубопроводы сети высокого давления и трубопроводы манометров.
11. Установить заглушки поз. 11 в проверочные отверстия корпусов машин рулевых.
12. Отсоединить электрические цепи.
13. Извлечь штуцер поз. 12.
14. Отвернуть гайки поз.8, отклонить тяги поз.З и извлечь машину рулевую из корпуса поз. 1.
Примечание: при проверке машины рулевой второго канала вместо заглушки поз. 11 установить трубу поз. 10 (п.1), пункт 4 не выполнять, штуцер со шлангом сети высокого давления привернуть к штуцеру поз.2 (п.5).
3. Экономическая часть
Процесс создания и освоения новой техники является комплексным, охватывающим большой промежуток времени и большое количество исполнителей. Исходя из новизны создаваемого изделия и степени его комплексности в практике планирования СОНТ применяются два метода:
- метод, основанный на разработке ленточных планов - графиков;
- метод, основанный на разработке сетевых графиков.
Метод ленточных планов - графиков используется при относительно краткосрочных разработках и при небольших количествах исполнителей.
Сетевое планирование представляет собой систему планирования комплекса работ, направленную на достижение конечной цели.
3.1 Составление и расчет сетевого графика
Сетевое планирование основано на графическом изображении комплекса работ, которое отображает их логическую последовательность, взаимосвязь и длительность. Сетевое планирование имеет значительное преимущество перед обычным методом планирования и управления:
- наиболее полно учитывается связь между различными работами;
- появляется возможность более эффективного распределения срока окончания работ или ресурсов;
- появляется возможность более эффективного распределения ресурсов за счет оптимизации планов;
- возможность применения ЭВМ;
- наглядное и удобное изображение комплекса работ.
Сетевое планирование позволяет вести разработку в оптимальном режиме. Сетевая модель отображает логическую последовательность и взаимосвязь работ и изображается в виде графика, состоящего из стрелок и кружков.
Кружки на сетевом графике обозначают совершение отдельных событий, отображающих результаты выполнения работ. Продолжительности события не имеют.
Стрелки обозначают работы, то есть действия, которые совершаются для совершения событий. Работы имеют продолжительность, которая на графике указывается стрелкой.
Каждая работа имеет начало и окончание. На графике начало стрелки находится в предыдущем событии, а окончание в последующем.
Работы могут быть трёх типов:
- действительными;
- ожидаемыми;
- фиктивными.
Путем называется непрерывная последовательность работ между двумя событиями сетевого графика, в котором конечное событие каждой работы совпадает с начальным событием следующим за ней событием.
Существует три вида путей:
- полный путь (от начального до конечного события);
- предшествующий путь (от начального до данного события);
- последующий путь(от данного до конечного события). Критическим путем является полный путь, имеющий наибольшую длительность. Критический путь определяет продолжительность процесса в целом.
Для завершения всего комплекса работ в более ранние сроки необходимо принимать меры по сокращению длительности работ, лежащих на критическом пути.
При расчете сетевых графиков определяют ранние tрi
и поздние tni
сроки начала и окончания работ.
Ранний срок свершения события - это срок, необходимый для выполнения всех работ, предшествующих данному событию, т.к. это событие свершится только тогда, когда будут выполнены все работы, для которых оно является конечным (рис.3. 1).

Рис. 3. 1
 (3.1) (3.1)
Поздний срок свершения события - это такой срок, превышение которого вызовет аналогичную задержку наступления завершающего события графика. Поэтому расчет поздних сроков свершения событий осуществляется после нахождения критического пути по принципу, представленному на рис.3. 2.

Рис.3.2
 (3.2) (3.2)
Ранее начало каждой работы равно раннему сроку свершения начального в данной работе события:
 (3.3) (3.3)
Раннее окончание каждой работы определяется как сумма фона раннего начала и продолжительности ожидаемого времени выполнения этой работы:
 (3.4) (3.4)
Позднее окончание каждой работы равно позднему сроку свершения конечного события в работе:
 . (3.5) . (3.5)
Позднее начало работы определяется как разница между сроком позднего окончания и ожидаемым временем выполнения этой работы:
 (3.6) (3.6)
На основании рассчитанных ранних и поздних сроков начала и окончания работ определяются резервы времени работы.
Различают понятия полного и свободного резервов времени.
Резерв времени события RJ
-
это промежуток времени, на который может быть отсрочено свершение этого события, без нарушения критического пути.-
 (3.7)
(3.7)
Полный резерв времени работы  -
это максимальный период времени, на который можно увеличить продолжительность данной работы, не изменяя критического пути
-
это максимальный период времени, на который можно увеличить продолжительность данной работы, не изменяя критического пути
 (3.8)
(3.8)
Важным свойством этого резерва является то, что он может быть распределен между работами, лежащими на следующем пути, т.е. он является резервом всего последующего пути.
Свободный резерв времени работы  - это промежуток времени, на который может быть отодвинуто окончание данной работы, не изменяя ранних сроков начала последующих работ
- это промежуток времени, на который может быть отодвинуто окончание данной работы, не изменяя ранних сроков начала последующих работ
 (3.9)
(3.9)
Резервы времени работы позволяют маневрировать сроками начала и окончания работ, устанавливая наиболее благоприятные сроки выполнения работы с точки зрения рациональной загрузки ресурсов, выделяемых на достижение конечной цели. Резервами работ можно пользоваться также для выявления критического пути. Представляя цепную связь работ, он проходит по работам, не имеющим резервов.
Одними из важнейших операций при анализе рассчитанных параметров сетевого графика являются определение коэффициентов напряженности работ и вероятности свершения завершающего события в заданный срок.
Коэффициент напряженности работы кнi j
характеризует относительную сложность соблюдения сроков выполнения работ на некритических путях
 (3.10)
(3.10)
где -
 продолжительность максимального пути, проходящего через работу ij,
продолжительность максимального пути, проходящего через работу ij,
 - продолжительность критического пути; - продолжительность критического пути;
 - продолжительность отрезка максимального пути работы, совпадающего с критическим путем iJ. - продолжительность отрезка максимального пути работы, совпадающего с критическим путем iJ.
Контролировать правильность расчета сетевого графика необходимо по параметрам полного резерва времени и коэффициента напряженности. Причем резерв времени работ, лежащих на критическом пути всегда равен нулю, а ко-эффициент напряженности работ равен единице.
Таблица 3. 1
Картотека событий
| № события |
Перечень событий |
| 0 |
ТЗ получено |
| 1 |
ТЗ проработано |
| 2 |
Литература подобрана |
| 3 |
Литература изучена |
| 4 |
Тип РП выбран |
| 5 |
Математическая модель выбрана |
| 6 |
Расчеты проведены |
| 7 |
.Техническая документация выпущена |
| 8 |
Рабочий чертеж разработан -;. |
| 9 |
Эскизный проект выпущен и ТЗ скорректировано |
| 10 |
Техническая документация образца выпущена и выдана в производство |
| 11 |
Материал заказан |
| 12 |
Комплектующие изделия заказаны |
| 13 |
Производство подготовлено |
| 14 |
Детали изготовлены |
| 15 |
Проведен выпуск программы испытаний, сборка и настройка образца |
| 16 |
Проведены испытания образца |
| 17 |
Проведены корректировка технической документации и выпуск техпроекта |
| 18 |
Принятие решения о серийном производстве |
Таблица 3.2
Картотека работ
| № работы |
Перечень работ |
Продолжительность, дни |
Затраты на выполнение работ, руб. |
| tm
i
n
|
tmax
|
Cmax
|
Cmin
|
| 1 |
2 |
3 |
4 |
6 |
5 |
| 0-1 |
Проработка ТЗ |
1 |
2 |
300 |
280 |
| 1-2 |
Подбор литературы |
3 |
4 |
300 |
250 |
| 1-3 |
Изучение литературы |
4 |
5 |
300 |
280 |
| 2-3 |
Фиктивная работа |
0 |
0 |
0 |
0 |
| 3-4 |
Выбор типа РП |
2 |
3 |
700 |
600 |
| 4-6 |
Расчет параметров |
7 |
8 |
250 |
200 |
| 3-5 |
Выбор математической модели |
2 |
3 |
250 |
200 |
| 5-6 |
Фиктивная работа |
0 |
0 |
0 |
0 |
| 6-7 |
Выпуск технической документации |
7 |
8 |
200 |
180 |
| 7-8 |
Разработка рабочих чертежей |
11 |
12 |
5000 |
4000 |
| 8-9 |
Выпуск эскизного проекта и корректировка ТЗ |
3 |
4 |
2000 |
1500 |
| 9-10 |
Выпуск технической документации образца и выдача её в производство |
13 |
14 |
900 |
800 |
| 10-11 |
Заказ материалов |
1 |
2 - |
300 |
250 |
| 10-13 |
Заказ комплектующих изделий |
1 |
2 |
300 |
250 |
| 10-12 |
Подготовка производства |
1 |
2 |
300 |
250 |
| 11-12 |
Поставка материалов |
4 |
5 |
600 |
500 |
| 12-14 |
Изготовление деталей |
14 |
15 |
5000 |
4000 |
| 13-14 |
Поставка комплектующих изделий |
8 |
9 |
2000 |
1800 |
| 10-15 |
Выпуск программы испытаний |
6 |
7 |
700 |
600 |
| 14-15 |
Сборка и настройка образца |
7 |
8 |
1700 |
1500 |
| 15-16 |
Проведение испытаний |
11 |
12 |
2000 |
1000 |
| 15-17 |
Корректировка технической документации |
3 |
4 |
600 |
500 |
| 16-17 |
Выпуск технического проекта |
14 |
15 |
2000 |
1700 |
| 17-18 |
Принятие решения о серийном производстве |
7 |
8 |
700 |
500 |
Расчет сетевого графика проведен с применением ЭВМ. Из расчетов видим, что критический путь проходит через события:
0→
1→
3→
4→
6→
7→
8→
9→
10→
11→
12→
13→
14→
15→
16→
17→
18
Продолжительность критического пути 115 день.
Оптимизация сетевого графика в зависимости от полноты решаемых задач может быть разделена на частную и комплексную.
Видами частной оптимизации являются: минимизация стоимости всего комплекса работ при заданном времени выполнения проекта, минимизация времени выполнения разработки при заданной ее стоимости. Комплексная оптимизация - это нахождение оптимума в соотношениях величин затрат и сроков выполнения проекта.
Выводы:
1 Проведя расчет параметров сетевого графика мы видим, что при длине критического пути 115 затраты на комплекс работ составляют 24296 рублей.
2 Проведя оптимизацию сетевого графика исходя из минимума затрат, мы видим, что при этой же длине критического пути затраты на комплекс работ составляют 26576 рублей.
3 Проведя оптимизацию, исходя из минимума длины критического пути при директивном сроке ПО дней, длина критического пути составит 123 дня при затратах на комплекс работ 24146 рублей.
4.Проведя комплексную оптимизацию, исходя из минимума затрат при директивном сроке ПО дней, длина критического пути составит 120 дней при затратах на комплекс работ 24426 рублей.
4. Охрана труда
Охрана труда - это комплекс законодательных, социально-экономических, организационных, технических, санитарно-гигиенических мероприятий, обеспечивающих сохранение здоровья и работоспособности человека в процессе производства.
Задача охраны труда - свести к минимальной вероятность поражения или заболевания работающего с одновременным обеспечением комфорта при максимальной производительности труда. Реальные производственные условия характеризуются, как правило, наличием некоторых опасных и вредных производственных факторов.
Опасным производственным фактором называется производственный фактор, воздействие которого на работающего в определённых условиях при-водит к травме или к другому внезапному, резкому ухудшению здоровья.
Вредным производственным фактором называется такой производственный фактор, воздействие которого в определенных условиях приводит к заболеванию или снижению трудоспособности.
Примерами опасных факторов могут служить открытые токоведущие части оборудования, движущиеся детали машин и механизмов, раскаленные тела, возможность падения с высоты самого работающего либо деталей, предметов, наличие емкостей со сжатыми или вредными веществами и т.п. Примерами вредных факторов являются вредные примеси в воздух, неблагоприятные метеорологические условия, лучистая теплота, недостаточное освещение, вибрации, шум, ультра- и инфразвук, ионизирующие и лазерные излучения, электромагнитные поля, повышенная напряженность и тяжесть труда, наличие микроорганизмов или насекомых и т.д.
Между опасными и вредными факторами нельзя провести четкой границы. Один и тот же фактор может привести к несчастному случаю.
Решающим направлением улучшения условий труда, превращение всех производств в безопасные, является воплощение новой безопасной техники.
На работоспособность человека влияет организация трудового процесса, метеорологические условия производственной среды, шум, освещение производственного помещения, его температура и многое другое.
Безопасность труда обеспечивается соблюдением правил по технике безопасности, санитарных норм и правил. Также для обеспечения безопасности труда должны предъявляться требования к сооружениям, производственным зданиям, оборудованию. При этом необходимо обеспечивать защиту рабочих мест от воздействия опасных и вредных факторов, содержать рабочие места в строгом соответствии с санитарно-гигиеническими нормами.
Улучшение условий труда, повышение его безопасности влияют на результаты производства - на производительность труда, качество и себестоимость продукции.
Производительность труда повышается за счет сохранения здоровья и работоспособности человека, экономии живого труда путем повышения уровня использования рабочего времени, продления периода активной трудовой деятельности человека, экономии общественного труда путем повышения качества продукции, улучшения использования основных производственных фондов, уменьшения числа аварий и т.п.
Улучшение условий труда и его безопасность приводят к снижению производственного травматизма, профессиональных заболеваний, что сохраняет здоровье трудящихся и одновременно приводит к уменьшению затрат на оплату льгот и компенсаций за работу в неблагоприятных условиях труда, на оплату последствий такой работы, на лечение, переподготовку работников производства в связи с текучестью кадров по причинам, связанным с условиями труда.
Улучшение условий труда приводит и к социальным результатам -улучшению здоровья трудящихся, повышению степени удовлетворенности трудом, укреплению трудовой дисциплины, повышению престижа ряда профессий, росту производственной и общественной активности и улучшению ряда других показателей.
4.1 Анализ вредных и опасных факторов при проектировании РП
Проектирование - это работа с чертежами, с технической документацией, с расчетами, с ЭВМ. Конструктору-проектировщику приходится часами работать над чертежами, поэтому в помещении где работает конструктор должно быть освещение соответствующее санитарным нормам и правилам. Правильно спроектированное и выполненное освещение на предприятии обеспечивает возможность нормальной производственной деятельности. Сохранность зрения человека, состояние его центральной нервной системы и безопасность на производстве в значительной мере зависят от условий освещения.
При недостаточном освещении в помещении, где работает конструктор, у работающего постепенно ухудшается зрение, а следовательно, и его общее физическое состояние, и следовательно работоспособность.
После разработки технологических факторов и технической документации изготавливают экспериментальный образец и производят испытания на испытательных стендах. При этом возникает опасность возникновения пожара или поражения током.
4.2 Меры по недопущению вредных и опасных факторов
Для предотвращения вредных и опасных факторов на предприятии при строительстве производственных зданий необходимо соблюдать все требовании санитарных норм и правил. Также необходимо регулярно производить инструктаж работников предприятия по технике безопасности, надо постоянно следить за электрооборудованием и за наличием противопожарных средств.
Мероприятия пожарной профилактики проводятся в стадии проектирования, строительства и эксплуатации промышленных и гражданских объектов; к ним относятся обеспечение противопожарной безопасности технологических установок, систем электрооборудования.
Для избежании недостатка освещенности в помещении ещё на стадии строительства и оборудования необходимо произвести расчеты освещения с учетом назначения помещения.
4.2.1 Расчет освещенности
В настоящее время действуют нормы освещенности СНиП 1/-4-79. Эти нормы охватывают естественное и искусственное, освещение промышленных предприятий.
В виду ряда причин, вызывающих постепенное уменьшение освещенности, начальная освещенность должна быть равна нормированной, умноженной на коэффициент запаса, значение которого регламентированы СНиП. При установлении нормативных значений коэффициента запаса сопоставляется стоимость очистки светильников при различной её частоте и затраты, связанные с увеличением значения R, так что последний должен соответствовать оптимальному режиму эксплуатации. Обычно значение R принимается в пределах 1,3-2.
Для чертёжно-копировального и проектно-конструкторского бюро значения освещенности колеблются от 300 до 500 люкс. Исходя из этого, проведёмрасчёт освещенности помещения площадью S = 15-10 м2
и высотой потолка h
= 27 м, принимая в качестве источника света лампы ЛДЦ количество светильников 20.
где Е -
фактическая освещенность;
Ф
- световой поток лампы, находящейся в светильнике;
N -
число светильников в помещении;
S
- площадь помещения;
k
- коэффициент запаса;
z- коэффициент, учитывающий неравномерность распределения освещённости по помещению.
Так как длина помещения равна 15 метров, ширина помещения 10 метров, S = 150 м2
.
Световой поток каждой лампы равен  = 5220 Лм.[5] = 5220 Лм.[5]
В светильнике установлено по две лампы, отсюда:
Ф = 2
ּ
Ф'= 2
ּ
5220 = 10440 Лм
Из выше описанного выбираем коэффициент запаса. На основании нормСНиП k = 1,8. Зависимость коэффициента использования η
от площади помещения можно учесть одной комплексной характеристикой - индексом помещения:

гдеА и В стороны помещения
Исходя из выше сказанного η = 0,5
Значение коэффициента z зависит от характера кривой светораспределения светильников и отношения рассеяния между светильниками к высоте ихподвеса. При расположении люминесцентных светильников рядом z = 1,1.
Отсюда:
 лк
лк
Полученная освещенность соответствует нормам СНиП.
4.2.2 Электробезопасность
При работе с электрическими установками, приборами и схемами необходимо соблюдать правило техники безопасности. Электрический ток может являться причиной несчастных случаев, большую часть которых происходит из - за пренебрежительного отношения к опасности, которую он представляет.
Степень воздействия электрического тока на человека зависит от целого ряда причин:
- силы тока и его частоты;
- участка поражения;
- состояние организма в момент поражения;
- индивидуальных особенностей организма.
Электрический ток силой более 100 мА
для человека смертелен. Токсилой 50-100 мА
вызывает потерю сознания у пострадавшего.
Сопротивление человека зависит от состояния кожного покрова в точках соприкосновения с токоведущими частями. Величина сопротивления тела человека может колебаться от нескольких Ом до нескольких тысяч Ом.
Для предотвращения несчастных случаев при обслуживании электрических установок в лаборатории, работающие с ними должны знать:
- причины возникновения несчастных случаев; все условия и меры безопасности, предусмотренные инструкцией;
- правила освобождения пострадавших и оказания им первойпомощи при поражении электрическим током.
Обеспечить безопасною работу человека с электроустановками возможно при помощи таких технических средств как:
- защитное заземление;
- зануление;
- выравнивание потенциалов;
- защитное отключение; -
- электрическое разделение сети.
Защитным заземление называется преднамеренкое соединение с землёй или её эквивалентом металлических, нетоковедущих частей, которые могут оказаться под напряжением. д
В установках с напряжениемдо 1000 В сопротивление заземляющего устройства должно быть не более 4 Ом.
Произведем расчет заземления. Сопротивление одиночного заземления рассчитывается по следующей формуле:
где -
удельное сопротивление грунта  ; ;
l
-длина заземления; -
в
-ширина участка;
t глубина залегания заземлителя.
Принимаем следующие величины:
Получим:

Сопротивление соединительной полосы считается по следующей формуле:
где ρ-
удельное сопротивление грунта ρ=
50 (Ом);
 - длина полосы (10 м); - длина полосы (10 м);
в
-ширина полосы (0,25 м);
t-
глубина залегания (5,2 м). J
Получаем:
Rn
=4,4 Ом
Сопротивление вертикальных электродов равно:
где  -заданное сопротивление (
-заданное сопротивление ( )
)
Определяем необходимое количество вертикальных электродов:
 , ,  1 1
где ηв
-
коэффициент использования вертикального заземления (ηв
= 0,8).
Расчетное сопротивление искусственного заземления находим по зависимости:
При этом должно выполнятся следующее условие: 
где ηт
-
коэффициент использования соединительной полосы (ηт
= 0,5) Получим
Так как (в данном случае  ),
то отсюда следует, что размеры заземления выбраны правильно. ),
то отсюда следует, что размеры заземления выбраны правильно.
4.2.3 Пожарная безопасность
По пожарной безопасности все здания делятся на категории. Данное помещение относится к категории Д - это производства, в которых обрабатываются не горючие вещества и материалы в холодном состоянии. Рассматриваемое здание относится к первой степени огнестойкости.
Огнестойкость - это способность здания или конструкции сопротивляться воздействию пожара в течении определённого времени при сохранении эксплуатационных функций.
Для зданий первой степени огнестойкости необходимо, чтобы предел огнестойкости несущих стен, стен лестничных клеток, колонн был не менее 2,5 часов, лестничных площадок - не менее 1часа, наружных стен из навесных панелей, перегородок и покрытий - не менее 0,5 часа.
Повысить огнестойкость здания можно облицовкой или отштукатуриванием металлических конструкций.
Для обеспечения пожарной безопасности существуют следующие требования по содержанию территории:
1.Территория помещения отдела должна содержаться в чистоте и систематически очищаться от пыли, отходов производства.
2. Проходы, выходы, коридоры и средства пожаротушения не разрешается загромождать различными предметами и оборудованием. На случай возникновения пожара должна быть обеспечена возможность безопасной эвакуации людей.
3.Запрещается производить перепланировку помещения без предвари-тельной разработки проекта.
4.По окончании рабочего дня необходимо:
- обесточить рубильником помещение;
- все электрические установки должны быть защищены от токов короткого замыкания;
- осмотреть помещение на состояние пожарной безопасности.
В случае возникновения пожара для эвакуации кроме главного хода имеются аварийные двери. Ширина дверей, ведущих из помещения в коридор 0,8 метра. Снабжение зданий водой производится от систем водоснабжения для хозяйственных и пожарных мероприятий.
В помещении имеются огнетушители ОУ-2 и ОУ-5. Также, помещение оборудовано центральной пожарной сигнализацией.
При возникновении пожара следует действовать в следующем порядке:
1. Немедленно сообщить в пожарную службу по телефону 01 о пожаре, указать точный адрес места пожара!
2. Принять меры к эвакуации людей, если им угрожает опасность.
3. Немедленно приступить ««тушению пожара первичными средствами пожаротушения.
4. Организовать встречу пожарной команды, Показать место пожара и ближайшие источники воды.
5. Вызвать к месту пожара начальника отдела, а в его отсутствии заместителя начальника отделения.
6. Отключить вентиляционную систему оборудования, при необходимости обесточить помещение и прекратить все работы.
7. В случае угрозы для жизни людей немедленно организовать их спасение, используя для этого все имеющиеся силы и средства.
8. Принять меры к спасению материальных ценностей и |технической документации.
Заключение
В данном дипломном проекте проведено проектирование пропорционального воздушно-динамического рулевого привода гиперзвуковой ракеты зенитного комплекса.
В процессе проектирования рулевого привода по данным технического, задания был выбран тип и схема рулевого привода, составлена математическая модель функционирования, рассчитаны обобщенные и конструктивные параметры исполнительного механизма, на основе которых спроектирована конструкция рулевого привода, проведен температурный расчет конструкции, рассчитаны динамические характеристики спроектированного рулевого привода по нелинейной математической модели с использованием вычислительной техники, произведен расчет управляющего электромагнита, а также проведен проверочный расчет спроектированного электромагнита с использованием вычислительной техники на предмет обеспечения требований, предъявляемых к нему.
В технологической части дипломного проекта разработано приспособление.
В экономической части дипломного проекта составлен и рассчитан сетевой график по этапам проектирования рулевого привода, продолжительность критического пути которого составила 115 дней.
В части охраны труда дипломного проекта проведен анализ вредных и ошибочных факторов при процессе проектирования произведены расчеты освещения с учетом назначения помещения, соблюдены правила техники безопасности.
Список использованной литературы
1. Абрамович Т.Н. Прикладная газовая динамика. - М.: Наука, 1969г.- 824с.
2. Краснов Н.Ф. Аэродинамика: Учебник для студентов вузов.- М.: Высшая школа, 1980г. - 495 с.
3. Лыков А.В. Тепломассообмен: Справочник.- М.: Энергия, 1978г. -480с.
4.Организация и планирование машиностроительного производства: Учебник для машиностроительных специальностей вузов под ред. М.И. Ипатов.
5. Охрана трудам в машиностроении: Учебник для вузов под ред. Е.Я. Юдина. - М: Машиностроение, 1983г.- 432с.
6. Петрищева Э.М. Методические указания по выполнению дипломных проектов факультета САУ. - Т.:ТГУ, 1995г. - 44 с.
7. Подчуфаров Б.М, Основы динамики тепломеханических систем.- Т.:ТПИ, 1982г.- 83с.
8. Справочная книга по охране труда под. ред. Русака О.H.
Л.:Машиностроение, 1989г.- 541 с.
9.Теория систем автоматического управления под ред. В.А. Бесекерского - М.: Наука 1975г.-768 с.
10. Федоренко В.В., Шошин А.И. Справочник по машиностроению.- Л.: Машиностроение, 1982г. 229 с.
|