Лабораторная работа: Изучение прямолинейного движения тел на машине Атвуда 2
|
Название: Изучение прямолинейного движения тел на машине Атвуда 2 Раздел: Рефераты по физике Тип: лабораторная работа | |||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
| Федеральное Агентство по образованию ТОМСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ СИСТЕМ УПРАВЛЕНИЯ И РАДИОЭЛЕКТРОНИКИ (ТУСУР) Кафедра физики ОТЧЕТ Лабораторная работа по курсу "Общая физика" ИЗУЧЕНИЕ ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ ТЕЛ НА МАШИНЕ АТВУДА Преподаватель Студент группы ___________ /________ / __________ / ___________ / ___________200_ г. 08 июля 2009 г. 2009 1. ЦЕЛЬ РАБОТЫ Целью работы является изучение закона прямолинейного ускоренного движения тел под действием сил земного тяготения с помощью машины Атвуда. 2. ОПИСАНИЕ УСТАНОВКИ И МЕТОДИКИ ЭКСПЕРИМЕНТА
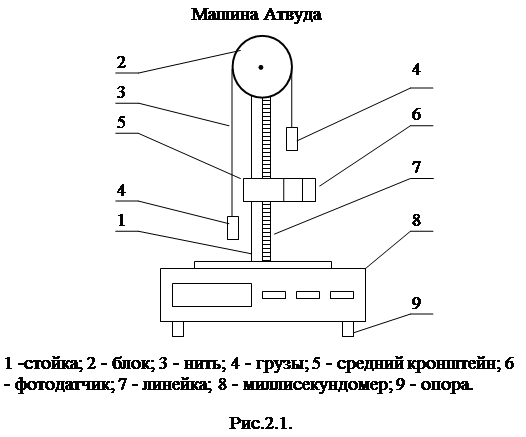
Схема экспериментальной установки на основе машины Атвуда приведена на рис.2.1. На вертикальной стойке 1 крепится легкий блок 2, через который перекинута нить 3 с грузами 4 одинаковой массы. В верхней части стойки расположен электромагнит, который может удерживать блок, не давая ему вращаться. На среднем кронштейне 5 закреплен фотодатчик 6. На корпусе среднего кронштейна имеется риска, совпадающая с оптической осью фотодатчика. Средний кронштейн имеет возможность свободного перемещения и фиксации на вертикальной стойке. На вертикальной стойке укреплена миллиметровая линейка 7, по которой определяют начальное и конечное положения грузов. Начальное положение определяют по нижнему срезу груза, а конечное - по риске на корпусе среднего кронштейна. Миллисекундомер 8 представляет собой прибор с цифровой индикацией времени. Регулировочные опоры 9 используют для регулировки положения экспериментальной установки на лабораторном столе.9 Принцип работы машины Атвуда заключается в том, что когда на концах нити висят грузы одинаковой массы, то система находится в положении безразличного равновесия. Если на правый груз положить перегрузок, то система грузов выйдет из состояния равновесия и начнет двигаться. 3. ОСНОВНЫЕ РАСЧЕТНЫЕ ФОРМУЛЫ
a- ускорение тела t- время движения груза
где, Δ(a)=ε(a)*a (3.8) где, Δ(a) – абсолютная погрешность a где, k- угловой коэффициент 4. РЕЗУЛЬТАТЫ РАБОТЫ И ИХ АНАЛИЗ. Измеренные значения и результаты их обработки приведены в таблице. Таблица (4.1) Результаты прямых и косвенных измерений
Δ(a)=0.149*2.88=0.429 Таблица (4,2) Рассчитанные погрешности
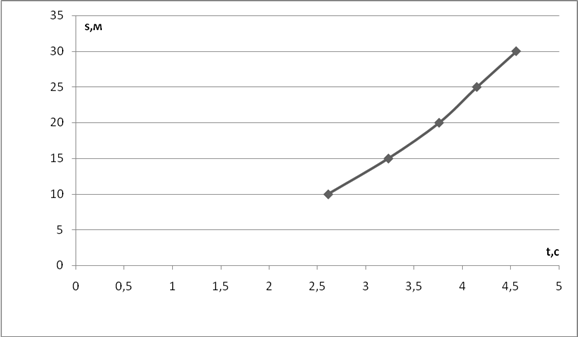
график (4.1) зависимости s=f(t)
график (4.2) зависимости s=f(t2 )
график (4.3) зависимости 5. ВЫВОДЫ Закон прямолинейного ускоренного движения тел под действием сил земного тяготения выполняется так как экспериментальные точки легли на прямую в приделах доверительных интервалов.
6. ОТВЕТЫ НА КОНТРОЛЬНЫЕ ВОПРОСЫ 1. Обозначим массы грузов - М, массу перегрузка – m. Предположим, что блок и нить невесомы, нить не растяжима, сила трения мала. На каждый из грузов действует сила тяжести и сила натяжения нити. 2. Уравнения движения грузов имеют вид: (M + m)g – T1 = (M + m)a1 Mg – T2 = Ma2 В силу нерастяжимости нити а2 = -а1 : при невесомом блоке Т1 = Т2 . В итоге имеем следующую систему уравнений: (M + m)g – T1 = (M + m)a1 Mg – T1 = Ma1 . 3. Возможные причины, обуславливающие несовпадения теоретических выводов с результатами измерений могут быть относительная погрешность, случайная погрешность и суммарная погрешность. 4. По величине отклоняющей кривизны от прямой. 5. Если массы грузов одинаковы, то система находится в равновесии. Если массы различны – грузы движутся с ускорением. При этом величина ускорения зависит от различия масс, момента инерции блока и момента сил трения в оси блока. |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||