КУРСОВОЙ ПРОЕКТ
"
Электропривод вентиляционной установки
"
Содержание
Введение
1. Описание технологической схемы
2. Определение необходимой производительности
3.Выбор электродвигателя
4.Проверка электродвигателя по перегрузочной способности и пусковому моменту
5.Построение характеристик рабочей машины
6.Построение нагрузочной диаграммы электропривода
7.Обоснование и описание схемы управления системой электроприводов
8.Выбор аппаратуры управления и защиты
9.Подсчет стоимости выбранного комплекта электрооборудования
10. Расчет устойчивости системы двигатель- рабочая машина
Перечень элементов
Заключение
Литература
Введение
С незапамятных времен человек пытается заменить тяжелый физический труд работой автоматических механизмов и машин. Для этого он использовал силу животных на сельскохозяйственных работах, энергию ветра и воды на мельницах и оросительных системах, а позже - химическую энергию топлива. Так появился привод - совокупность энергий двигателя, устройство передачи движения к механизму в виде редуктора, ременной, цепной или зубчатой передачи и устройств управления механической энергией. Датой рождения электропривода считается 1838 год, год, когда русский ученый, академик Петербургской академий наук Б.С Якоби установил на лодку изобретенный им электродвигатель постоянного тока.
Электропривод - это система, состоящая из электродвигательного, передаточного и управляющего устройств, предназначенных для приведения в движение вспомогательных органов рабочей машины и управления этим движением. Электропривод способствует повышению качества продукций, снижению себестоимости, высвобождению рабочих, избавлению людей от тяжелого и утомительного труда.
Электровооруженность в сельскохозяйственном производстве приобретает особое значение, так как оно в значительной степени определяет производительность труда, уровень комплексной механизации, электрификации и автоматизации технологических процессов. Научно - технический прогресс в сельском хозяйстве вызывает необходимость дальнейшего совершенствования и подготовки специалистов. Целью данной курсовой работы является изучение основных сведений по теории расчету, выбору и применению автоматизированных электроприводов в сельскохозяйственном производстве.
1.
Описание технологической схемы
Рассмотрим схему вентиляции, выполненной с помощью крышных осевых вентиляторов, представленную на рисунке 1.
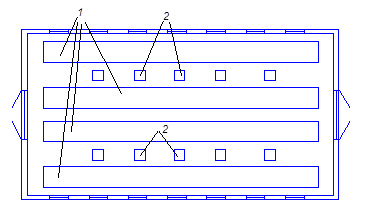
Рисунок 1 – Технологическая схема вентиляционной установки,
где 1 – стойла для лошадей, 2 – вентиляционные отверстия крышных вентиляторов
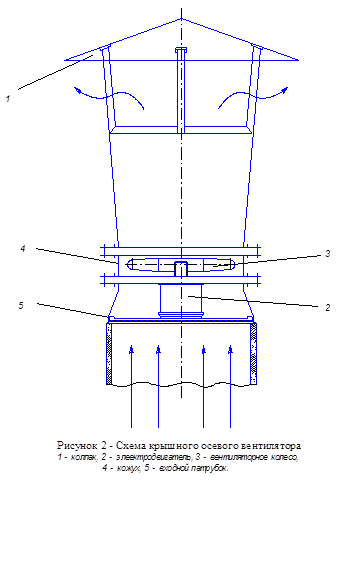
В связи с тем, что в животноводческих помещениях имеются выделения различного рада, имеющие неблагоприятные появление (влага, углекислота, теплота и т.п.), есть необходимость в постоянном активном вентилировании, особенно где содержатся много животных. Помимо естественной вентиляции применяется вынужденная, посредством применения вентиляторов. Вентиляционные отверстия размещены равномерно по длине и ширине помещения. Схема крышного осевого вентилятора изображена на рисунке 2, где отображены основные элементы и направления движения воздушного потока.
2. Определение необходимой производительности
Выбор типа и количества вентиляторов производится, исходя из необходимой суммарной производительности вентиляционной установки. За расчетную производительность системы вентиляции принимается максимально возможный необходимый расход воздуха по условиям: удаления влаги, удаления тепла, удаления углекислоты. В основе расчета производительности лежит соотношение:
 (1) (1)
где Li
—
необходимая производительность вентиляционной установки с точки зрения поддержания внутри помещения i-й компоненты состава воздуха, на уровне нормы ziв, при условии, что количество вредной компоненты, выделяемой в помещении, равно zi и ее содержание в наружном воздухе равно ziн.
Расход воздуха для вентиляции животноводческого помещения определяют по следующим показателям. Расход воздуха на удаление избыточной влаги:
 (2) (2)

где W—количество влаги, выделяемой животными и другими источниками (испарение из пола, кормушек и т. д.); d'2
; d'1
— допустимое содержание влаги в воздухе внутри и снаружи помещения;
 (3) (3)

где W— влага, выделяемая животным при относительной влажности φ= 100%; W1
= 102,5 г/(ч·гол.); W2
— влага, выделяемая из кормушек и пола;
 (4) (4)

 (5) (5)

 (6) (6)

где d2
, d1
— содержание влаги в воздухе в насыщенном состоянии при данных температурах внутри и снаружи помещения; d2
= 25,6 г/кг; d1
= 1,8 г/кг; φ2
, φ1
— относительная влажность воздуха внутри и снаружи помещения; φ2
= 0,7; φ1
= 0,9; р2
, p1
— плотность воздуха при данных температурах; р2
= 1,27 кг/м3
; р1
= 1,34 кг/м3
.
Расход воздуха на удаление избыточной углекислоты:
 (7) (7)
L=126*50/2.5*0.3=8400 м3
/ч.
где с - количество вредностей, выделяемых одним килограммом массы животного; с = 336 см3
/(ч·кг); тс
- масса животного: тс
= 160 кг; с2
-допустимое содержание углекислоты внутри помещения; с1
- допустимое содержание углекислоты в наружном воздухе.
Расход воздуха на удаление избыточной теплоты:
 (8) (8)
где Q — лишняя теплота в тепловом балансе при данных 6,, 0Н
, выделяемая животными; с — теплоемкость воздуха; с = 1,282 кДж/(м3
-К).
 (9) (9)

где Qж
— количество теплоты, выделяемой животным в течение одного часа; Qж
= 704 кДж/(ч·гол.).
За расчетную производительность вентиляционной установки принимаем наибольшее значение расхода воздуха из трех результатов, приведенных выше, L= 8400 м3
/ч.
3 Выбор электродвигателя
Расчетный напор вентилятора:
 (10) (10)
где НД
— динамический напор, Па; Нс
— статический напор, Па.
 (11) (11)
где γ — удельный вес воздуха; γ = 11,77 Н/м3
; v — скорость движения воздуха; v = 0,6 м/с; g— ускорение свободного падения; g = 9,81 м/с2
.
 (12) (12)
где Ro
— удельное сопротивление движению воздуха, Па/м.
 (13) (13)
где D— диаметр воздуховода; D= 280 мм.
Потери напора в местных сопротивлениях составляют порядка 10... 12% динамического напора; Σβ = 0,1 Н = 0,022 Па.
По часовой производительности и расчетному напору выбирают вентилятор Ц4-70 № 3;
| L
в
, м3
/ч
|
Нв,
Па
|
n
В,
мин-1
|
η
В,
|
| 3000
|
490,5
|
1330
|
0,58
|
Потребная мощность вентилятора:
 (14) (14)

где КЗ
— коэффициент запаса; КЗ
= 1,2; ηв
— коэффициент полезного действия вентилятора; ηв
= 0,58; ηп
—коэффициент полезного действия передачи; ηп
= 1.
Выбор электрического двигателя. Опыт эксплуатации вентиляционных установок животноводческих помещений показывает, что приводы приточных вентиляторов в основном работают в длительном режиме.
В связи с этим выбирают электрический двигатель, исходя из следующих условий:
1. Климатическое исполнение и категория размещения СУ2.
2. Способ защиты от воздействия окружающей среды IP54.
3. Конструктивное исполнение и способ монтажа IM1081.
4. По модификации (двигатель сельскохозяйственного исполнения со встроенной температурной защитой).
5. По частоте вращения:
nнд
>nв
; 1395 > 1 330 мин-1
.
6. По роду тока и напряжения (переменного тока ~I, UH
= 380/220 В).
7. По мощности:
По литературе [элтехсправочник] выбираем электродвигатель
Выбирают двигатель АИР80А4БСУ2;3
P,
кВт
|
n,
об/мин
|
Iн,
A
|
nн,
%
|
Cos
|
Mп |
М*К
|
К
I
|
J
кг-м2
|
m
кг
|
| 0,75 |
1395 |
2.3 |
75 |
0.81 |
2,2 |
2,2 |
5.5 |
3.2-10"3
|
13,8
|
 Максимальные потери в приводе вентилятора: Максимальные потери в приводе вентилятора:
 (15) (15)


где Мн
— номинальный момент двигателя, Н·м; ωо
и ωн
—угловая синхронная н номинальная скорости вращения приводного двигателя; ω0
= 157 рад/с; ωн
= 146,5 рад/с.
 (16) (16)
Относительные максимальные потери:
 (17) (17)

Потери при номинальной скорости вращения:
 (18) (18)
4 Проверка электродвигателя по пусковому моменту
1) По пусковому моменту:
Мпуск.дв.
≥ (1,2...1,3) Мтр.р.м.
или
 (19) (19)
где  - коэффициент, учитывающий снижение напряжения (до 30%) на зажимах пускаемого двигателя; Мпуск.дв
= μпуск
Мном
- пусковой момент двигателя; при этом μпуск
= Мпуск.дв
/Мном
- кратность пускового момента (берется из каталога); Мном
= Рном
/wном
- номинальный момент двигателя; Рном
- номинальная мощность двигателя в Ваттах (каталог); wном
- номинальная частота вращения электродвигателя (каталог), если в каталоге вместо wном
приводится синхронная wо
, то номинальную частоту вращения, рад/с, определяюткак: - коэффициент, учитывающий снижение напряжения (до 30%) на зажимах пускаемого двигателя; Мпуск.дв
= μпуск
Мном
- пусковой момент двигателя; при этом μпуск
= Мпуск.дв
/Мном
- кратность пускового момента (берется из каталога); Мном
= Рном
/wном
- номинальный момент двигателя; Рном
- номинальная мощность двигателя в Ваттах (каталог); wном
- номинальная частота вращения электродвигателя (каталог), если в каталоге вместо wном
приводится синхронная wо
, то номинальную частоту вращения, рад/с, определяюткак:
wном
= wо
· (1 - Sном
), (20)
здесь Sном
- номинальное скольжение (каталог), обычно оно изменяется в пределах 0,06...0,07. При этом связь между синхронной скоростью вращения, об/мин, и синхронной частотой вращения, рад/с имеет вид: wо
= 0,105 nо
;
Мтр.р.м.
- момент трогания рабочей машины (берется из нагрузочной диаграммы рабочей машины для нулевого значения ее скорости).

6,25 Н·м>0,6 Н·м
Следовательно, условие выполняется.
5 Построение характеристик рабочей машины
1) Механическая характеристика машины представляет собой зависимость между моментом сопротивления, т. е. M
с=
f
(
w
).
Механическая характеристика механизмов в общем случае описывается уравнением:  (24)
(24)
где Мтр —
момент трогания механизма;
Мсн —
момент сопротивлении при номинальной угловой скорости;
х —
показатель степени.
Для вентиляторов показатель степени х =2.
Момент трогания насосов, вентиляторов и дробилки ориентировочно можно принять Мтр= (0,2—0,3) Мсн.
Номинальный момент сопротивления Мсн определяется, исходя из анализа усилий, возникающих в механизме при его работе.
Номинальный момент сопротивлений дробилки, вентиляторов, насосов определяется из выражения:
 (25) (25)
где Рн—
номинальная мощность машины, Вт;
ωН
—номинальная угловая скорость вала двигателя, рад/с.
Мтр= 0,2*2,5=5Нм

Таблица 1 – расчет механической характеристики
| W |
0 |
50 |
100 |
150 |
200 |
250 |
296,1 |
350 |
| Мс |
0,5 |
0,56 |
0,73 |
1,01 |
1,41 |
1,92 |
2,5 |
3,29 |
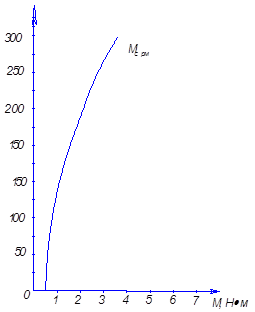
Рисунок 3 – Механическая характеристика вентилятора
2) Нагрузочная характеристика или нагрузочная диаграмма рабочей машины представляет зависимость усилий или моментов сопротивлений от времени или пути, т. е. Fc
,
Mc
=
f
(
t
, а).
При постоянной скорости зависимость Fc, Мс =
f
(
t
)
равноценна зависимости Fc
,
Mc
=
f
(
a
).
Поэтому для машин, предусмотренных заданиями, нагрузочные диаграммы строятся как зависимости приведенного к валу двигателя момента сопротивлений от времени. Характер нагрузочной диаграммы машины в значительной степени зависит от ее технологической и кинематической характеристик. Необходимо тщательно проанализировать эти характеристики и установить величины и длительность действия тех или иных моментов или усилий сопротивлений.
Для вентиляторной характеристики характерный спокойный пуск и постоянный момент сопротивления, равный рассчитанному выше. Нагрузочная характеристика представлена на рисунке 4.
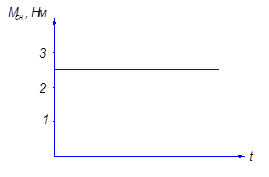
Рисунок 4 – Нагрузочная характеристика вентилятора
3) Инерционная характеристика машины представляет собой данные о величине момента инерции машины и законов его изменения от различных факторов.
Величина момента инерции машин определяется массами движущихся деталей и грузов и радиусами инерции. Приведенный к валу двигателя момент инерции зависит также or кинематической характеристики системы двигатель — машина.
Величину приведенного к валу двигателя момента инерции машины необходимо определить как для холостого хода, так и для работы под нагрузкой.
Приведенный к валу электродвигателя момент инерции машины определяется, исходя из равенства запасов кинетической энергии до приведения и после приведения.
 (26) (26)
где Jдв - момент инерции двигателя, кг/м2
;
Jрм - момент инерции рабочей машины, кг/м2
Jрм = 8* Jдв=8*0,0008=0,0064кг/м2
J=0,0064+0,0008=0,0072 кг/м2
6. Построение нагрузочной диаграммы электропивода
Определение времени пуска проводится следующим порядке
1. По пяти точкам строится механическая характеристика АД. (рис 5)
2. На этом графике строится приведенный момент сопротивления рабочей машины  (справочная величина). (справочная величина).  Н*м. Н*м.
3 Находим динамический момент  графическим способом. графическим способом.
4. Находим масштаб по моменту инерции по формуле:
 , (15) , (15)
где  - приведенный момент инерции, - приведенный момент инерции,  ; ;
 - отрезок соответствующий - отрезок соответствующий 
Заменим график  прямоугольником (ломаной линией). Стороны прямоугольников параллельные оси абсцисс знают значения . Стороны параллельные оси ординат показывают значение приращения скорости прямоугольником (ломаной линией). Стороны прямоугольников параллельные оси абсцисс знают значения . Стороны параллельные оси ординат показывают значение приращения скорости  . .
5.Из точки А проведём окружность радиусом  , делаем насечку на оси ординат в точке 1 соединяем точку О с горизонталью 1 линией параллельной линии [А-1], получаем на горизонтали 1 точку 1̀. Остальные построения производятся аналогично. , делаем насечку на оси ординат в точке 1 соединяем точку О с горизонталью 1 линией параллельной линии [А-1], получаем на горизонтали 1 точку 1̀. Остальные построения производятся аналогично.
6.Определяем масштаб по оси вращения, для чего применим основное уравнение движения электропривода.
 , (16) , (16)
 , (17) , (17)
 , (18) , (18)
где  - масштаб к моменту инерции, - масштаб к моменту инерции,  ; ;
 - масштаб к частоте вращения, - масштаб к частоте вращения,  ; ;
 - масштаб к моменту динамическому, - масштаб к моменту динамическому,  . .
 . .
 ; (19) ; (19)
где [O-B] – отрезок соответствующий максимальной скорости вращения, мм;
 ; ;
 ; (20) ; (20)
где [О-Д] – отрезок соответствующий ( ) критическому ) критическому
динамическому моменту, мм
 . .
Время разгона определяется из выражения;
 , (21) , (21)
где  - масштаб по оси времени, с/мм; - масштаб по оси времени, с/мм;
 - отрезок соответствующий длительности разгона. - отрезок соответствующий длительности разгона.
 с/мм, с/мм,
 с с
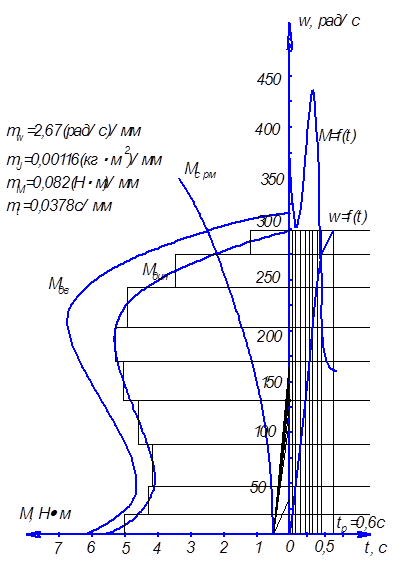
Рисунок 5. –Механическая характеристика ЭП с рабочей машиной
7. Обоснование и описание схемы управления системой электроприводов
Требования к схеме автоматического управления
1. Схема должна обеспечивать плавное или ступенчатое регулирование частоты вращения двигателей в режиме автоматического управления температурой.
2. Схема должна предусматривать возможность перехода на ручное управление.
3. Схема должна предусматривать защиту от коротких замыканий, тепловую, обрыва фаз сети и самопроизвольного пуска.
Для управления вентиляционной установкой предлагается схема представленная на рисунке 6.
Данная схема позволяет производить управление установкой в ручном и автоматическом режимах. Для выбора режима предназначен переключатель SA1.
Данная схема позволяет производить управление установкой в ручном и автоматическом режимах. Для выбора режима предназначен переключатель SA1.
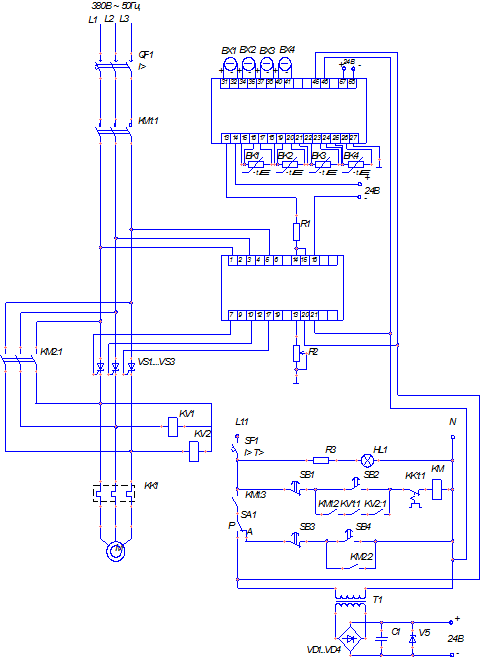
Рассмотрим сначала автоматический режим работы. Включение всей схемы производится автоматом QF1. Схема управления включается автоматическим выключателем SF1. Переключатель находится в положении А. Далее включаем пускатель КМ1 с помощью кнопки SB1, который в свою очередь контактом КМ1:3 подает питание на регулятор А1, блок управления тиристорами и блок питания с выходным напряжением 24 В (необходимо для питания активных датчиков BX1 и ЦАП выхода А1). Регулятор А1 предназначен для сравнивания двух контролируемых параметров (температура и
 влажность) и по полученным данным формировать управляющий сигнал на выходе в пределах 4…24 мВ. Данный сигнал является основой для формирования управляющего сигнала тиристорами в силовой сети с помощью БУТС. И уже в зависимости от уровня сигнала на управляющих электродах тиристоров происходит регулирование скорости вращения электродвигателей, а следовательно и подачи. влажность) и по полученным данным формировать управляющий сигнал на выходе в пределах 4…24 мВ. Данный сигнал является основой для формирования управляющего сигнала тиристорами в силовой сети с помощью БУТС. И уже в зависимости от уровня сигнала на управляющих электродах тиристоров происходит регулирование скорости вращения электродвигателей, а следовательно и подачи.
В ручном режиме включение производится аналогично. SA1 в положении Р. Включение – выключение производится с помощью кнопок SB4 и SB3 на усмотрение оператора.
В схеме применена следующая защита:
- от КЗ в силовой сети автомат QF1 с электромагнитным расцепителем;
- от обрыва фаз и перегрузки тепловые реле КК1…КК2, защищающие группу двигателей;
- от неполнофазного режима реле напряжения KV1 и KV2;
- цепь управления защищена автоматическим выключателем SF1.
8. Выбор аппаратуры управления и защиты
Выбор автоматического выключателя:
1. По номинальному напряжению: Uна
=660В >Uс
=380В
2. По номинальному току: Iн
>Iн.дв.
 
I
н.общ
=
I
н.гр
+
I
н.рг
I
н.общ
=5,75+5,75=11,5 (А)
I
н
›
I
раб
I
н
=16А ›
I
раб
=11,5А
Расчет тока срабатывания электромагнитного расцепителя:
I
ср.э
=к•
I
н.р
где к
– кратность срабатывания электромагнитного расцепителя.
I
ср.э
=12•16=192 (А)
Автомат: АЕ2030 – 100-20У3Б
Выбор магнитного пускателя.
Выбираю магнитный пускатель КМ1, КМ2:
 U
н
=660 В >
U
с
=380 В U
н
=660 В >
U
с
=380 В
I
н
=25 А >
I
раб
=11,5 А
U
к
=
U
ц.упр
=220В
ПМЛ 2101 У3
U
н
=660 В >
U
с
=380 В
I
н
=25 А >
I
раб
=11,5 А
U
к
=220 В >
U
ц.упр
=220 В
Выбираю тепловые реле
РТЛ
По номинальному напряжению: U
н
=660 В >
U
с
=380 В
Номинальный ток: I
н.теп.р.
>
I
ТР.
=1,2·5,75=6,9 А
Номинальный ток теплового расцепителя: I
н.теп.р.
=7 А
Пределы регулирования 5,5-8,0(А)
Тепловое реле РТЛ – 1012 04
Выбор сигнальной лампы.
Для световой сигнализаций выберу аппаратуру АС – 14011У3. Лампа коммутаторная, Uл
=220В, цвет светофильтра – зеленый.
Выбор кнопок управления.
КМЕ4111У3.
По рабочему току – до 6А.
По количеству контактов – 1з - 1р.
По климатическому исполнению и категорий размещения У3.
Автоматический выключатель
SF
1:
АЕ2024-00-54У3
Блок питания:
БП 24 фирмы «ОВЕН»
Реле напряжения
KV
1…
KV
2:
ЕЛ-8
Многоканальный измеритель – регулятор ТРМ 138И фирмы «ОВЕН»
Блок управления тиристорами и симисторами БУТС фирмы «ОВЕН»
Термо-датчики ТСМ 014-50М.В3.20/05
Датчик влажности ВХЛ 72-4К.Э3
Силовой тиристор КУ 202 К
9.
Подсчет стоимости выбранного комплекта электрооборудования
Таблица 2 - Расчет стоимости
| Наименования оборудования. |
Марка,
тип
|
Количество штук. |
Стоимость единицы. |
Стоимость рублей. |
| 1. Щит управления |
ПР11 |
1 |
3560 |
3560 |
| 2. Многоканальный измеритель - регулятор |
ТРМ 138И |
1 |
10630 |
10630 |
| 3. Блок управления тиристорами |
БУТС |
1 |
4480 |
4480 |
| 4. Двигатель n=3000об/мин |
RAH80A2BУ2 |
10 |
2065 |
20650 |
| 5. Силовой тиристор |
КУ202К |
6 |
390 |
2340 |
| 6. Автоматический выключатель. |
АЕ2046М-10 |
1 |
560 |
560 |
| 7. Магнитный пускатель |
ПЛМ2101У3 |
2 |
523 |
1046 |
| 8. Тепловое реле |
РТЛ – 1012 04 |
2 |
165 |
330 |
| 9. Реле напряжения. |
ЕЛ-8 |
2 |
330 |
330 |
| 10. Сигнальная арматура |
АС – 14011У3 |
1 |
75 |
75 |
| 11. Кнопки управления. |
КМЕ4111У3 |
4 |
120 |
480 |
| 12. Блок питания |
БП 24 |
1 |
560 |
560 |
| 13. Автоматический выключатель |
АЕ2024-00-54У3 |
1 |
45 |
45 |
| 14. Термо-датчик |
ТСМ 014-50М.В3.20/05 |
4 |
225 |
1020 |
| 15. Датчик влажности |
ВХЛ 72-4К.Э3 |
4 |
470 |
1880 |
| Сумма: |
------------ |
----------- |
----------- |
47986 |
Расчет сделан на основании прайс-листов фирмы ООО «Интерэлектрокомплект»,представленные в приложении 1.
10. Расчет устойчивости системы двигатель – рабочая машина
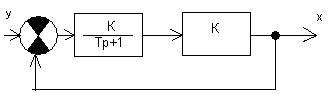
Рисунок 7. Функциональная схема
где к-усилительное безинерционное звено – наиболее простое звено АСУ. без запаздывания.
Для составления уравнения такого звена достаточно определить только коэффициент усиления к.
В нашем случае – это механическая передача (муфта) между фазным двигателем и ДВС.
 - аппереодическое звено первого порядка - аппереодическое звено первого порядка
где к – коэффициент усиления звена (к=1)
Т – постоянная времени звена, с (Т=500с)
описывается дифференциальным уравнением в операторной форме. В нашем случае это автоматизация скорости движения электродвигателя с фазным ротором.
Рассчитаем устойчивость системы по критерию Михайлова.
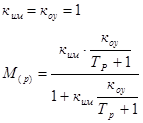
 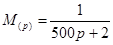
Подставляя в характеристическое уравнение в полином р=jω. Определяем вектор Михайлова.
М(jω)=500(jω)+2=Re(ω)+jIm(ω)
где Re(ω)=2
Im(ω)=500jω
Изменяя частоту ω от 0 до ∞, устанавливаем, что конец вектора, расположенный в первом квадранте комплексной плоскасти.
Вывод:
Годограф Михайлова начинается на положительной вещественной полуоси и последовательно проходит комплексной плоскости равной порядку характеристического уравнения (1=I), следовательно система устойчива.
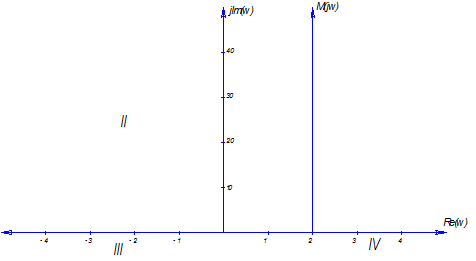
2) определим устойчивость системы управления температурой воздуха в конюшне по критерию Найквиста.
Подставляя S=jw в выражение W(S) построим на плоскости график КЧХ разомкнутой системы W(jw) при кр
=8 Ти
=40 с. Для этого сначала построим КЧХ апериодического звена:
W (jw)=кp
/ (jΘS+1)
График этой КЧХ представляет собой полуокружность, расположенную в 4 квадранте комплексной плоскости. Радиус полуокружности равен кp
/ 2, а его центр расположен на положительной оси на расстоянии кp
/ 2 от начала координат (рис.2)
Задаваясь значениями w вычисляем несколько значений угла φ, позволяющих построить несколько векторов КЧХ, Значения w рекомендуется выбирать в пределах w*
<
w<
w**
чтобы соответствующие значения угла φ равномерно располагались в секторе 450
<
φ<
800
:
φ (w)=arctg(Θw);
φ (w)=arctg(550w)
Значения w*
и w**
определяются:
w*
=tg450
/Θ
w**
=tg800
/Θ
Модули построенных векторов А можно вычислить:
А=
А(w)=
/ Wτ
(jw)/= кτ
/√ (Θ2
w2
+1)
A=0.8/ √(5502
w2
+1),
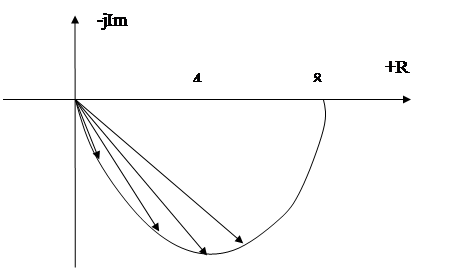
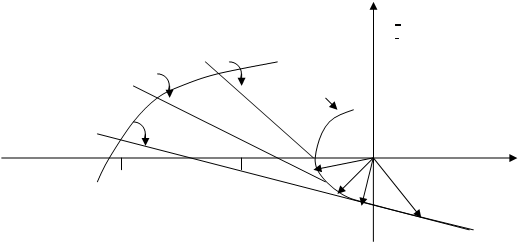
Однако вместо вычислений проще измерить их линейкой. Затем построим годограф КЧХ объекта W0
(jw). Для этого используя циркуль и транспортир повернем каждый вектор Wτ
на угол β=wτ по часовой стрелке (рис.3):
α = φ + β
Рисунок 3. Построение КЧХ объекта
Для построения требуемого участка КЧХ разомкнутой системы достаточно расположить участки КЧХ объекта в пределах 3 квадранта комплексной плоскости. Из концов векторов КЧХ на этом участке восстанавливаем к ним перпендикуляры, длина которых определяется:
ΔА=А/ Ти
w=А/40w
Рисунок 4. Построение требуемого участка КЧХ разомкнутой системы по соответствующему участку характеристики объекта.
Вывод: поскольку годограф охватывает точку с координатами (-1;j0), то рассмотренная система не устойчива.
| Форма |
Зона |
Поз. |
Обозначение |
Наименование |
Кол. |
Прим. |
| 1. Щит управления
|
ПР11
|
1 |
| 2. Многоканальный измеритель -
|
ТРМ 138И
|
1
|
| регулятор
|
| 3. Блок управления
|
БУТС
|
1
|
| тиристорами
|
| 4. Двигатель
n=3000
об/мин
|
АИР
80A2B
У2
|
6
|
| 5. Силовой тиристор
|
КУ202К
|
3
|
| 6. Автоматический
|
АЕ2046М-10
|
1
|
| выключатель.
|
| 7. Магнитный пускатель
|
ПЛМ2110
|
2
|
| 8. Тепловое реле
|
РТЛ – 1012 04
|
1
|
| 9. Реле напряжения.
|
ЕЛ-8
|
2
|
| 10. Сигнальная арматура
|
АС – 14011У3
|
1
|
| 11. Кнопки управления.
|
КМЕ4111У3
|
4
|
| 12. Блок питания
|
БП 24
|
1
|
| 13. Автоматический
|
АЕ1031
|
1
|
| выключатель
|
| 14. Термо-датчик
|
ТСМ 014-50М.В3.20/05
|
4
|
| 15. Датчик влажности
|
ВХЛ 72-4К.Э3
|
4
|
Заключение
Основная задача проектирования рационального электропривода состоит в том, чтобы наиболее правильно сочетать свойства всех его элементов со свойствами рабочей машины и технологического процесса, выполняемого машинным устройством.
Свойства технологического процесса и рабочей машины, знание которых необходимо для проектирования электропривода, описываются приводными характеристиками машины. К этим характеристикам относятся: технологическая, кинематическая, энергетическая, механическая, нагрузочная.
Автоматизация является одним из основных направлений в развитий сельскохозяйственного электропривода. После внимательного изучения технологической, кинематической характеристик машины и требований к схеме автоматического управления составляется принципиальная схема автоматического управления.
Литература
1. Коломиец А.П., Ерошенко Г.П., Кондратьева Н.П., Владыкин И.Р., Юран С.И. и др. Устройство, ремонт и обслуживание электрооборудования в сельскохозяйственном производстве. / Учебник. – М.: Издательский центр «Академия», 2003. – 368 с.
2. Коломиец А.П., Потапов В.А., Кондратьева Н.П., Владыкин И.Р. Электробезопасность на предприятиях./ Учебное пособие для студентов ВУЗов – Ижевск: РИО «Шеп», 2003, 148с.
3. Правила технической эксплуатации электроустановок потребителей. – М.: Изд-во НЦ ЭНАС, 2003. – 208 с.
4. Правила устройств электроустановок (ПУЭ), издание седьмое, раздел 1 (главы 1.1; 1.2; 1.7; 1.9), раздел 7 (главы 7.5; 7.6; 7.10) – М.: Изд во НЦ ЭНАС, 2003. - 176с.
5. Правила устройств электроустановок (ПУЭ), издание седьмое, раздел 6, раздел 7 (главы 7.1; 7.2). – М.: Изд-во НЦ ЭНАС, 2002, - 80с.
6. Коломиец А. П., Ерошенко Г.П., Кондратьева Н.П., Фокин В.В., Владыкин И.Р., Расторгуев В.М. и др. Устройство, ремонт и обслуживание электрооборудования в сельскохозяйственном производстве. (учебник) - М.: Издательский центр «Академия», 2003, - 368с.
7. Ерошенко Г.П., Коломиец А.П., Кондратьева Н.П., Таран М.А., Медведько Ю.А. - Эксплуатация электрооборудования (Допущено М-СХ РФ в качестве учебника для студентов высших учебных заведений, обучающихся по специальности 311400 – электрификация и автоматизация с.х.) (учебник) М.: Колос,- 2005
|