| Реферат
на тему:
"
Оценка качества процессов регулирования
"
1. Общие положения по оценке качества
Устойчивость необходимое, но недостаточное требование, предъявляемое к системе, она должна удовлетворять требованиям по качеству.
Качество системы
– это соответствие системы, предъявляемым к ней требованиям (например: по точности, быстродействию и другим показателям качества).
Качество оценивается качеством переходного процесса и точностью в установившемся режиме, т.е. с помощью динамических и статических показателей качества. Существует ряд методов оценки качества процессов регулирования, которые можно классифицировать следующим образом:
Прямые методы
: классический метод; оценка качества по переходной функции; методы моделирования.
Косвенные методы
: частотные; корневые; интегральные.
Рассмотрим методы оценки качества.
2. Классический метод оценки качества
Классический метод основан на решении неоднородных дифференциальных уравнений, т.к. аналитическое решение уравнений выше 3-го порядка представляет определенные трудности, то этот метод находит ограниченное применение и используется для систем до 3-го порядка.
3. Оценка качества по переходной функции
Рассмотрим переходную функцию некоторой системы (рис. 1).
При оценке качества переходного процесса с использованием переходной функции определяются прямые показатели качества.
По переходной функции определяются следующие прямые показатели качества:
1. Время регулирования
(переходного процесса) – время, по истечении которого
 (1)
(1)
где в = 3–5% от h
¥
, т.к. теоретически tp
®¥.
Время регулирования характеризует быстродействие системы.
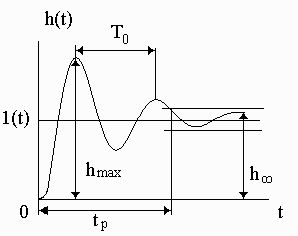
Рис. 1
2. Величина перерегулирования
 (2) (2)
Относительное перерегулирование – s
%
.
 (3) (3)
Если s
%
= 0, процесс называется монотонным. Относительное перерегулирование характеризует перегрузки в системе. Обычно s
%
= 20–30%.
3. Число перерегулирований, т.е. число минимумов и максимумов за время регулирования – N
. Обычно N
= 2–3.
4. Период собственных колебаний T0
= 2
p
/
w
0
.
5. Величина статической ошибки 
6. Логарифмический декремент затухания 
Достоинство метода: простота и наглядность.
Недостатки метода: не учитывается правая часть уравнения; не видно влияния параметров на качество; сложность применения для систем выше 2-го порядка.
4. Оценка качества систем методами моделирования
При проектировании и исследовании систем управления широко используются методы моделирования (аналоговое, цифровое, имитационное и др.). Идея метода – использование вместо реальной системы адекватной ее модели. При моделировании систем управления используются либо языки моделирования (например: CSSL, GPSS, SIMULA и др.), либо пакеты прикладных программ (например: CC, SIAM и др.).
5. Частотные методы оценки качества
Частотные методы позволяют оценить как устойчивость, так и качество системы. При этом для оценки качества системы можно использовать любую частотную характеристику, но наиболее часто используют АФХ, ЛАЧХ, АЧХ, ВЧХ.
Оценка качества по АЧХ замкнутой системы. Допустим, выходной сигнал следящей системы точно копирует входной, (это возможно только в идеальных системах управления) при этом

Любая реальная техническая система инерционна (рис. 2).
Рис. 2
При этом:
w
0
- резонансная частота, которая характеризует частоту собственных колебаний системы (при А
= Аm
);
w
c
- частота среза (при А
= 1);
w
п
- верхняя граничная частота, которая характеризует полосу пропускания системы (при A = A(0)/
Ö
2
).
Только на небольшом участке в области низких частот характеристики входного и выходного сигнала совпадают, далее на резонансной частоте w
0
амплитуда имеет максимальное значение – A m
, при дальнейшем увеличении частоты система, вследствие инерционности не успевает реагировать на колебания больших частот и амплитуда резко падает. Так как в диапазоне w
c
и w
п
амплитуда резко падает, то можно считать w
c
=
w
п
.
Полоса пропускания влияет на точность и быстродействие.
Колебательность определяется M = Am
/ A(0).
Обычно М
= 1,2–1,5.
При малой колебательности система «вялая» имеет большое время регулирования – tp
. При большой колебательности увеличивается перегрузка системы и система приближается к границе устойчивости.
Т.о. косвенными показателями качества являются: М – колебательность; w0
- резонансная частота; wп
- верхняя граничная частота.
Оценка качества по АФХ и ЛАЧХ разомкнутой системы. Рассмотрим характеристики, приведенные на рис. 3.
Ветвь АФХ состоит из трех частей: низкочастотная (НЧ) – определяет статику системы; среднечастотная (СЧ) – определяет динамику системы; высокочастотная (ВЧ) – не представляет интереса, так как амплитуда сигнала в этой области мала.
Рис. 3
При оценке качества системы по АФХ и ЛАЧХ разомкнутой системы получают следующие косвенные показатели качества: Aз
– запас устойчивости по амплитуде (модулю); j
з
- запас устойчивости по фазе.
Рекомендуемые значения: Aз
= 20–30 дБ; j
з
= 40–600
.
Оценка качества по ВЧХ замкнутой системы. Рассмотрим основные свойства ВЧХ.
1. Каждой вещественной частотной характеристике – P(
w
)
соответствует определенная переходная функция – h(t).

Рис. 4
2. Значение вещественной частотной характеристики в нуле соответствует установившееся значение переходной функции, т.е. P(0)
Þ
h(
¥
)
. Если P2
(
w
)=кP1
(
w
)
то графики переходных функций имеют вид (рис. 4).
3. Изменение масштаба по оси частот. Если P (
a
×
w
) = h (t/
a
).
Графически это можно представить следующим образом (рис. 5).
 Рис. 5 Рис. 5
Рис. 5
Как видно из графика h
(
t
)
, чем больше w
п
, тем выше быстродействие системы.
4. Пик P(
w
)
характеризует колебательность и частоту колебаний (рис. 6).
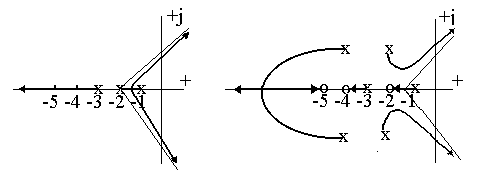 
Рис. 6
Как видно из графиков пик ВЧХ характеризует колебательность и период собственных колебаний системы.
Таким образом, по виду вещественной характеристики системы можно построить ее переходную функцию и определить ее качество.
6. Корневые методы оценки качества
Основа корневых методов – анализ расположения корней характеристического уравнения замкнутой системы в комплексной плоскости
 (4) (4)
Расположение корней характеристического уравнения замкнутой системы в комплексной плоскости характеризует не только устойчивость, но и качество системы (рис. 7). характеризует не только устойчивость, но и качество системы (рис. 7).
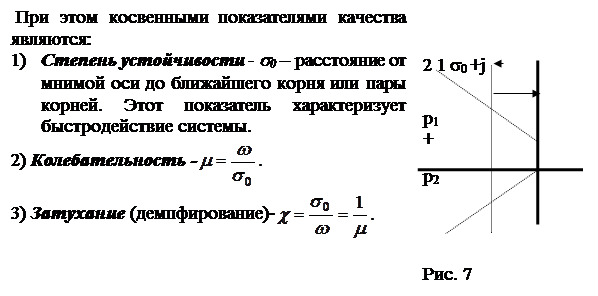
Линия 1 определяет запас устойчивости, а линия 2 определяет колебательность. Если корни расположены в области ограниченной линиями 1 и 2, то система удовлетворяет заданным s
0
и m
.
Определение длительности переходного процесса.
Корни ближайшие к мнимой оси являются определяющими (доминирующими), они определяют характер переходного процесса. Если ближайшим к мнимой оси является вещественный корень, то переходный процесс имеет вид:
 (5) (5)
Рассмотрим примеры.
Пример 1. Определить степень устойчивости и колебательность системы с характеристическим уравнением p3
+14p2
+53p+130 = 0.
Решение:
1. Определяем корни характеристического уравнения
p1
= -10 c-1
; p2,3
= (-2
±
j3) c-1
.
2. Определяем степень устойчивости s
0
= -2 c-1
и колебательность m
= 1,5.
Пример 2. Для заданной системы (рис. 9) определить зависимость степени устойчивости и колебательности от параметров системы.
Решение:
1. Определяем характеристический полином
D(p) = 1+Kр
(p) = Tp2
+p+k = 0.
2. Определяем корни характеристического уравнения
p2
+ (1/T) p+k/T = 0; p1,2
= -1/T
±
j
Ö
(k/T-1/ 4T2
).
3. Определяем:
– степень устойчивости s
0
= -1/2T c-1
;
– колебательность m
=
Ö
(k/T-1/ 4T2
)/ 0,5 T =
Ö
(4kT-1).
Применение критериев устойчивости для оценки качества
Критерии устойчивости Найквиста и Михайлова можно использовать не только для определения устойчивости системы, но и для оценки ее качества.
Применение критерия Михайлова для оценки качества.
Для определения, обладает ли система заданной степенью устойчивости необходимо в характеристический полином подставить p = -
s
0
+ j
w
вместо p = j
w
и, если  , то система не только устойчива, но и обладает заданной степенью устойчивости. , то система не только устойчива, но и обладает заданной степенью устойчивости.
Для определения, обладает ли система заданным демпфированием, необходимо в характеристический полином подставить p = -
s
0
+j
w
=
w
(-
c
+j)
вместо p = j
w
и, если  , то система не только устойчива, но и обладает заданным демпфированием. , то система не только устойчива, но и обладает заданным демпфированием.
Применение критерия Найквиста для оценки качества.
Для определения, обладает ли система заданной степенью устойчивости, необходимо в комплексную передаточную функцию разомкнутой системы подставить p = -
s
0
+ j
w
вместо p = j
w
и, если АФХ не охватывает критическую точку, то система не только устойчива, но и обладает заданной степенью устойчивости.
Для определения, обладает ли система заданным демпфированием, необходимо в комплексную передаточную функцию разомкнутой системы вместо p = j
w
подставить p=-
s
0
+ j
w
=
w
(-
c
+j)
и, если АФХ не охватывает критическую точку, то система не только устойчива, но и обладает заданным демпфированием.
7. Метод корневого годографа
Корневой годограф –
геометрическое место точек корней характеристического уравнения замкнутой системы при изменении какого-либо параметра системы (чаще всего 0 £ к
£ ¥).
Пусть задана передаточная функция разомкнутой системы
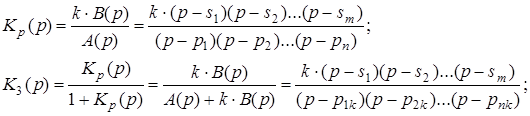 (6) (6)
где si
- нули передаточной функции разомкнутой системы;
pi
- полюса передаточной функции разомкнутой системы;
pk
- полюса передаточной функции замкнутой системы.
Задача состоит в том, чтобы, зная расположение нулей и полюсов передаточной функции разомкнутой системы, найти корни передаточной функции замкнутой системы как функции параметра системы. Это и есть корневой годограф.
Если полюс pk
(рис. 10) является корнем характеристического уравнения (т.е. точка принадлежит корневому годографу), то он обращает его в нуль, при этом выполняется условие модуля и аргумента:

| +j
pk
pk
-s1
s1
pk
-p1
p1
+
Рис. 10
|
|
 | Если из каждого полюса и нуля провести линии к точке корневого годографа, то сумма углов должна быть равна p, а модуль 1.
|
|
Для упрощения процедуры построения корневого годографа необходимо использовать правила, позволяющие приближенно определить расположение ветвей корневого годографа.
Рассмотрим основные свойства корневого годографа.
1. Число ветвей корневого годографа равно – n
.
2. Ветви корневого годографа расположены симметрично вещественной оси и нигде не пересекаются.
3. Ветви корневого годографа начинаются в полюсах передаточной функции разомкнутой системы, заканчиваются в нулях, а т. к. n
³
m
, то остальные n – m
ветвей уходят в бесконечность.
4. Ветви корневого годографа уходят в бесконечность вдоль асимптот.
Точка пересечения асимптот определяется как центр тяжести координат нулей и полюсов
 (7) (7)
Угол наклона асимптот определяется по формуле

где к = 1,2,…,¥. (8)
Например: угол наклона асимптот при различном их количестве имеет вид (рис. 11а-г)
при n-m = 1;
 при n-m = 2; при n-m = 2;
при n-m = 3;
 при n-m = 4; при n-m = 4;

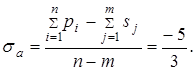
Определим расположение ветвей корневого годографа в области двух полюсов, расположенных на вещественной оси (см. рис. 12).
p2
+ap+b=0,  (9)
(9)
Если в-
увеличивается, то значение подкоренного выражения уменьшается и корни сближаются. Если значение подкоренного выражения равно нулю, корни сольются. Если значение подкоренного выражения меньше нуля, корни станут комплексными.
Расположение ветвей корневого годографа в области двух нулей на вещественной оси приведено на рис. 12б.
Полюса движутся навстречу друг к другу, сливаются и далее расходятся к нулям.
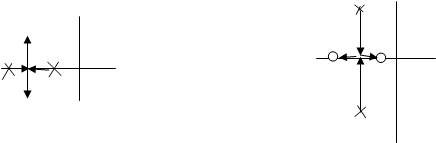
Рис. 12
Рассмотрим примеры.
Пример 3. Построить корневой годограф системы с передаточной функцией

Решение:
1. Определяем количество полюсов, нулей и их разность:
n = 3; m = 0; n-m = 3.
2. Определяем значение полюсов и нулей:
p1
= -1; p2
= -2 p3
= -3.
3. Определяем точку пересечения асимптот

4. Определяем угол наклона асимптот

5. Строим примерный график (рис. 13а). Если задать s
0
, то можно определить, при каком коэффициенте усиления система достигнет границы устойчивости и заданной степени устойчивости. При этом можно определить критический коэффициент усиления.
Пример 4. Построить корневой годограф системы, передаточная функция которой имеет вид

Решение:
1. Определяем количество полюсов, нулей и их разность:
n = 6; m = 3; n – m = 3.
2. Определяем значение полюсов и нулей:
p1
= -1; p2,3
= -2
±
j2; p4
= -3; p5,6
= -4
±
j2.
s1
= -2; s2
= -4; s3
= -5;
3. Определяем точку пересечения асимптот
4. Определяем угол наклона асимптот

Ветви корневого годографа пересекают мнимую ось при критическом коэффициенте усиления.
Литература
1. Автоматизированное проектирование систем автоматического управления. / Под ред. В.В. Солодовникова. – М.: Машиностроение, 1990. -332 с.
2. Вероятностные методы в вычислительной технике. Под ред. А.Н. Лебедева и Е.А. Чернявского – М.: Высш. Шк., 1986. -312 с.
3. Попов Е.П. Теория нелинейных систем. М.: Наука, 1979. – 255 с.
4. Справочник по теории автоматического управления. /Под ред. А.А. Красовского – М.: Наука, 1987. – 712 с.
5. Справочник по теории автоматического управления. /Под ред. А.А. Красовского – М.: Наука, 1987. -712 с.
6. Цыпкин Я.З. Теория линейных импульсных систем. М.: Наука, 1977. – 270 с.
|