|
Темой работы является анализ погрешностей спутниковой радионавигационной системы (СРНС), работающей в дифференциальном режиме. И включает в себя оценку влияния расположения подвижного пункта в условиях городской застройки, а именно выяснение влияния процессов затенения и отражения навигационных сигналов на основе экспериментальных данных.
СРНС предназначены для всепогодного, пассивного, глобального, высокоточного навигационно-временного обеспечения всевозможных потребителей на поверхности Земли, в приземном и ближайшем космическом пространстве. В моем конкретном случае, использовались два приемника AshtechSCA-12S, работающие с навигационной системой глобального позиционирования GPS.
Точность СРНС ухудшают ряд факторов, возникающих из-за влияния атмосферных явлений и солнечной радиации на параметры спутниковых сигналов, ухода часов спутников и т.п. Такие ошибки можно значительно уменьшить, применив дифференциальный режим работы с использованием стационарного навигационного приёмника, установленного в точке с заранее определёнными координатами. Такой приёмник называют базовым. С помощью этого приёмника можно вычислять корректирующие значения погрешностей, возникающих в дальномерных спутниковых сигналах.
Возможности аппаратуры в лаборатории спутниковой радионавигации, где и делается эта работа, позволяют принимать сигнал одновременно на две антенны двумя приемниками. То есть для возможны следующие основные варианты получения экспериментальных данных:
- простой прием и усреднение (в течение длительного времени);
- прием и дифференциальное уточнение;
- прием и дифференциальное уточнение с фазовой коррекцией.
Данная работа делается с целью выяснения того, причины каких именно погрешностей вносят наибольший вклад в ухудшение точности определения местоположения в условиях городской застройки.
Состав системы
Система «НАВСТАР» состоит из трех сегментов:
· космического сегмента;
· сегмента управления (CS - control sеgшеnt);
· сегмента потребителей.
Космический сегмент образован орбитальной группировкой, состоящей из 24 основных и 3 резервных навигационных космических аппаратов Block II (далее просто НКА). НКА распределены по шести плоскостям, которые разнесены по долготе на 60˚. В каждой плоскости находится четыре, и, возможно, один резервный НКА,которые двигаются по круговым орбитам с наклонением 55˚ и с полуосью около 26,5 тыс.км. Период обращения НКА составляет 12 часов.
Сегмент управления состоит из:
· Основной станции контроля и управления;
· Резервной станция контроля и управления;
· Четырех наземных антенн слежения;
· Шести наземных станций слежения.
Основная станция контроля и управления расположена на авиабазе Шривер, шт. Колорадо. Станции слежения расположены вдоль экватора, что обеспечивает благоприятные условия для наблюдения за НКА.
С помощью наземного сегмента управления осуществляются высокоточные измерения параметров орбит НКА, которые собираются и обрабатываются. Результатом обработки является информация об орбите, частотно временные поправки, ионосферные поправки. Полученная информация передается на борт НКА для последующей ретрансляции потребителю. Частота обновления ретрансляционной информации приблизительно раз в два часа.
Сегмент пользователей «НАВСТАР» составляют приемники GPS и сообщество пользователей системы. Приемники GPS преобразовывают сигналы спутников в оценки местоположения, скорости и времени. Приемники GPS используются для навигации, позиционирования, коррекции времени и других целей.
Основная задача системы «НАВСТАР» - навигация в трехмерном пространстве. Существуют навигационные приемники для летательных аппаратов, кораблей, сухопутных транспортных средств и для индивидуального использования.
Передаваемые каждым НКА системы «НАВСТАР» в составе оперативной информации эфемериды описывают положение фазового центра передающей антенны данного НКА в связанной с Землей геоцентрической системе координат WGS-84, определяемой следующим образом:
· начало координат расположено в центре масс Земли;
· ОСЬ Z направлена на Условный полюс Земли, как определено в рекомендации Международной службы вращения Земли (IERS);
· ОСЬ Х направлена в точку пересечения плоскости экватора и нулевого меридиана, определенного Международным бюро времени (BIH);
· ОСЬ Yдополняет геоцентрическую прямоугольную систему координат до правой.
Геодезические координаты точки в системе координат WGS-84 относятся к эллипсоиду, значения большой полуоси и полярного сжатия которого даны в таблице 1.5.
Геодезическая широта В точки М определяется как угол между нормалью к поверхности эллипсоида и плоскостью экватора.
Геодезическая долгота L точки М определяется как угол между плоскостью нулевого меридиана и плоскостью меридиана, проходящего через точку М. Положительное направление счета долгот - от нулевого меридиана к востоку.
Геодезическая высота Н определяется как расстояние по нормали от поверхности эллипсоида до точки М.
Фундаментальные геодезические константы и основные параметры общеземного эллипсоида, принятые в системе координат WGS-84 приведены в таблице 1.1.
Таблица 1.1 - Геодезические константы и параметры общеземного эллипсоида WGS-84
| Угловая скорость вращения Земли |
7.292115*10-5
радиан/с |
| Геоцентрическая константа гравитационного поля Земли с учетом атмосферы |
398 600.5 км3
/с2
|
| Большая полуось эллипсоида |
6 378 137 м |
| Коэффициент сжатия эллипсоида |
1/298.257 223 563 |
| Нормированный уровень коэффициента второй зональной гармоники потенциала (C20) |
-484. 16685*10-6
|
1.1 Принцип построения
Успехи ракетной техники, приведшие к созданию мощных носителей, способных обеспечить вывод на орбиты вокруг Земли искусственных спутников Земли (ИСЗ), привели к идее использовать их для целей навигации кораблей. Суть идеи заключается в следующем: если источник радиоизлучения (т.е. радиомаяк) поместить на ИСЗ и знать координаты его в любой момент времени, то навигационную задачу можно решить так же, как и в случае маяков наземного базирования, если обеспечить измерение геометрических величин относительно маяков с привязкой к той же шкале времени [3].
Для реализации идеи необходимо было решить следующие проблемы:
· обеспечить определение текущих координат и получение эфемерид ИСЗ, которые позволяют рассчитывать координаты в любой момент времени вперед;
· обеспечить доведение координат ИСЗ (эфемерид) до каждого потенциального потребителя навигационной информации;
· обеспечить доведение до всех потребителей шкалы единого времени и синхронизацию работы всех включенных в систему ИСЗ.
Прежде чем рассмотреть варианты решения перечисленных проблем, остановимся на некоторых положениях космической баллистики для оценки характеристик траекторий движения ИСЗ.
Для длительного существования ИСЗ как небесного тела ему необходимо придать скорость, превышающую так называемую первую космическую скорость. Эта скорость равна, примерно, 7.8 км/с (при малых высотах спутника) и обеспечивает движение по круговой орбите; при увеличении скорости орбита становится эллиптической, причем эксцентриситет эллипса растет с ростом скорости. Величина первой космической скорости уменьшается при возрастании высоты ИСЗ над земной поверхностью, что приводит к увеличению времени обращения спутника вокруг Земли. Для круговой орбиты высотой Н период обращения Т характеризуется следующими выборочными значениями:
Н = 250 км, Т = 89 мин; H = 1000 км, Т = 96 мин;
Н = 20240 км,
Т = 12 час; Н = 35870 км, Т = 24 час.
Координаты и составляющие вектора скорости спутников меняются очень быстро. Поэтому сообщения о параметрах движения спутников содержат сведения не об их координатах, а информацию о параметрах некоторой модели, аппроксимирующей траекторию движения ИСЗ на достаточно большом интервале времени (примерно 1 час). Параметры аппроксимирующей модели меняются достаточно медленно, и их можно считать постоянными на интервале аппроксимации. Состав параметров аппроксимирующей модели определяет и состав навигационных сообщений спутников. Поэтому модель движения, принимаемая в системе для расчета траекторий движения ИСЗ, является одним из основных понятий, необходимых для изложения принципов ее функционирования [3].
Самой простой моделью движения ИСЗ является кеплеровская модель. В этой модели учитывается единственная сила притяжения, образуемая центральным полем тяготения Земли. Движение ИСЗ, задаваемое кеплеровской моделью, происходит в фиксированной плоскости. Текущие полярные координаты ИСЗ в этой плоскости R(t)
и  связаны между собой и с параметрами кеплеровской траектории р
и е
следующим образом: связаны между собой и с параметрами кеплеровской траектории р
и е
следующим образом:
 (1.1) (1.1)
где R(t) –
расстояние;
 - фокальный параметр; - фокальный параметр;
е –
эксцентриситет;
- угол, называемый истинная аномалия.
Текущие координаты R(t)
и образуют вектор  называемый радиус-вектор ИСЗ. называемый радиус-вектор ИСЗ.
Для определения положения ИСЗ в каждый момент времени необходимо найти связь между истинной аномалией и временем t.
В кеплеровской модели такая связь задается уравнением Кеплера, которое для эллиптической орбиты имеет вид:
 (1.2) (1.2)
где  - момент времени прохождения ИСЗ через перигей орбиты; - момент времени прохождения ИСЗ через перигей орбиты;
 - большая полуось эллипса; - большая полуось эллипса;
 - гравитационный параметр Земли; - гравитационный параметр Земли;
 - эксцентрическая аномалия (промежуточная величина, тоже угол). - эксцентрическая аномалия (промежуточная величина, тоже угол).
Решив последнее уравнение относительно для заданного момента времени  , значение , значение  находится по формуле: находится по формуле:
 (1.3) (1.3)
Если элементы  , , дополнить величинами, характеризующими положение плоской орбиты относительно неподвижной геоцентрической системы координат Oxyz, то такая совокупность величин будет полностью определять кеплеровское движение ИСЗ. , , дополнить величинами, характеризующими положение плоской орбиты относительно неподвижной геоцентрической системы координат Oxyz, то такая совокупность величин будет полностью определять кеплеровское движение ИСЗ.
В качестве параметров кеплеровской орбиты (кеплеровских элементов орбиты) наиболее часто используется следующая совокупностьвеличин (см. рисунок 1.1):

Рисунок 1.1 - Орбита спутника Земли и ее элементы
· наклонение плоскости орбиты относительно плоскости экватора – i;
· прямое восхождение (или долгота) восходящего узла орбиты – Ω;
· угловое расстояние перигея орбиты от восходящего узла (аргумент перигея) υ;
· эксцентриситет орбиты - с;
· большая полуось эллипса – а
·
время прохождения спутника через перигей орбиты - tп
Еще раз отметим, что указанная шестимерная совокупность параметров орбиты позволяет рассчитать координаты ИСЗ в любой момент времени в геоцентрической экваториальной системе координат Oxyz или любой другой, связанной с ней аналитическими зависимостями. Всвою очередь, элементы орбиты рассчитываются по измененной шестимерной характеристике движения ИСЗ по орбите в определенный момент времени. Такой характеристикой могут быть три координаты и три проекции вектора скорости. Измерение характеристик движения, расчет элементов орбиты и передачу последних на борт навигационных ИСЗ для ретрансляции потребителям осуществляет система орбитальных измерении, состоящая из сети измерительных пунктов и координационно-вычислительного центра.
В СРНС второго поколения применяется дальномерно-доплеровский метод. В среднеорбитальных дальномерно-доплеровских СРНС определяются местоположение, величина и направление вектора скорости потребителя в любой момент времени и в любой точке на поверхности Земли и околоземного пространства. Для этого в системе обеспечивается одновременная связь потребителя не менее чем с четырьмя спутниками. Все спутники ведут синхронное излучение дальномерных сигналов (ошибки синхронизации малы и не превышают 10-20 нс). В аппаратуре потребителя измеряется задержка спутникового сигнала относительно меток времени местной шкалы, вырабатываемых в аппаратуре потребителя. Эта задержка складывается из задержки сигналов при распространении в пространстве и разницы хода часов на спутниках и аппаратуре потребителя. Произведение этой суммарной задержки на скорость распространения сигнала принятого называть псевдодальностью.
Обозначим координаты потребителя на момент приема через  , а координаты j-го спутника на момент времени, предшествующий моменту приема на время распространения, - через , а координаты j-го спутника на момент времени, предшествующий моменту приема на время распространения, - через  . Тогда можно составить следующую систему нелинейных уравнений: . Тогда можно составить следующую систему нелинейных уравнений:
 (1.4) (1.4)
где  - разница хода часов потребителя и спутникового времени; - разница хода часов потребителя и спутникового времени;
 - значение задержки спутникового сигнала относительно меток времени шкалы потребителя. - значение задержки спутникового сигнала относительно меток времени шкалы потребителя.
Если число спутников не менее четырех, то вышеуказанная система может быть разрешена относительно четырех неизвестных и .
Таким образом, помимо координат одновременно определяется . Необходимые для решения уравнения координаты спутников извлекаются из навигационных данных.
Предыдущее выражение можно переписать следующим образом:
 (1.5) (1.5)
где 

 - измеренное значение дальности или псевдодальность; - измеренное значение дальности или псевдодальность;

Шкала времени спутника, и частота  его несущего колебания задаются от одного и того же бортового генератора. Аналогично шкала времени приемника потребителя, и частота его гетеродина его несущего колебания задаются от одного и того же бортового генератора. Аналогично шкала времени приемника потребителя, и частота его гетеродина  также задаются от эталона частоты приемника. Такое единство порождает связь расхождения шкал времени с расхождением частот: также задаются от эталона частоты приемника. Такое единство порождает связь расхождения шкал времени с расхождением частот:
 (1.6) (1.6)
где  - частота гетеродина приемника потребителя, рассматриваемая как функция времени в связи с относительно не высокой стабильностью эталона частоты приемника потребителя; - частота гетеродина приемника потребителя, рассматриваемая как функция времени в связи с относительно не высокой стабильностью эталона частоты приемника потребителя;
 - частота несущего колебания спутника – полагается постоянной, поскольку формируется от гораздо более стабильного бортового генератора. Относительная стабильность бортовых генераторов СРНС составляет величину порядка - частота несущего колебания спутника – полагается постоянной, поскольку формируется от гораздо более стабильного бортового генератора. Относительная стабильность бортовых генераторов СРНС составляет величину порядка  ; ;
 - начальная расстройка шкал времени. - начальная расстройка шкал времени.
Если продифференцировать выражение для расстояний по времени, то получим:
 (1.7) (1.7)
умножив левую и правую части последнего равенства на  где где  - длина волны несущей j-го спутника: - длина волны несущей j-го спутника:
 (1.8) (1.8)
Для члена  получаем: получаем:
  (1.9) (1.9)
В предположении, что номинальное значение частоты гетеродина приемника потребителя  величина величина  есть смещение частоты гетеродина относительно своего номинального значения. есть смещение частоты гетеродина относительно своего номинального значения.
С учетом (1.11) из (1.10) получаем:
 (1.10) (1.10)
где  -измеренное значение доплеровского смещения частоты в аппаратуре потребителя. -измеренное значение доплеровского смещения частоты в аппаратуре потребителя.
Дифференцируя в (1.10)  по времени, получаем систему уравнений относительно четырех неизвестных и по времени, получаем систему уравнений относительно четырех неизвестных и  : :

необходимые решения этой системы значения находятся в результате обработки измерений псевдодальностей. Значения  извлекаются из эфемеридных данных, сообщаемых спутниками. Таким образом, по мимо составляющих вектора скорости потребителя извлекаются из эфемеридных данных, сообщаемых спутниками. Таким образом, по мимо составляющих вектора скорости потребителя  одновременно определяется [3]. одновременно определяется [3].
Глобальная спутниковая система «НАВСТАР» предназначена для высокоточного определения пространственно-временных координат и составляющих скорости объектов-потребителей. Система разработана по заказу и находится под управлением МО (ВВС) США [5].
Система предоставляет два вида обслуживания [6]:
1. Standard Positioning Service (SPS) - стандартное обслуживание по определению местоположения, предназначенное для гражданских пользователей;
2. Precise Positioning Service (PPS) - точное обслуживание по определению местоположения, предназначенное для военных и авторизованных пользователей, имеет более высокую точность по сравнению с SPS.
Гражданские пользователи во всем мире используют SPS без ограничений. Большинство приемников может принимать сигнал SPS. Точность такой системы преднамеренно понижена до следующих значений:
· горизонталь 100 метров;
· вертикаль 156 метров;
· время 340 наносекунд.
Стандартное обслуживание по определению местоположения предоставляется с использованием сигнала «НАВСТАР» L1. Сигнал Ll передается всеми спутниками, входящими в состав группировки и содержит так называемый грубый код (С/А) и данные навигационного сообщения. Сигнал L1 также содержит точный код (P), который зарезервирован для военного использования и не является частью SPS.
Спутники «НАВСТАР» также передают сигнал L2, который не является частью SPS.
Авторизованные пользователи с криптографическим оборудованием, ключами и специально оборудованными приемниками используют PPS. К ним относятся американская армия, некоторые американские правительственные агентства и некоторые гражданские пользователи. Точность этой системы:
· горизонталь 22 метра;
· вертикаль 27.7 метров;
· время 100 наносекунд.
Здесь приведены показатели точности «НАВСТАР» из Федерального плана радионавигации 1994 года. Приведенные показатели имеют точность 95% и выражают значение двух среднеквадратичных отклонений. Для горизонтальных рисунков (цифр, показателей) 95% точность - эквивалент 2 drms (two distance rооt-mеаn-squаrеd), или два радиальных среднеквадратичных отклонения. Для вертикали и времени 95% точность - значение двух стандартных отклонений ошибки по высоте или ошибки по времени.
Изготовитель приемника может использовать другие меры точности. Среднеквадратичная (Root mеаn square - RМS) ошибка - значение одного среднеквадратичного отклонения (68%). Вероятная круговая ошибка (Circular Erоr Probable - СЕР) - значение радиуса круга, центрированного при фактическом положении, который содержит 50% оценок положения. Вероятная сферическая ошибка (Spherical Erоr Probable - SEP) - сферический эквивалент вероятной круговой ошибки, который является радиусом сферы, центрированной при фактическом положении, которая содержит 50% из трех оценок положения. В противоположность 2 drms, drms или RМS; СЕР и SEP не подвержены воздействию больших грубых ошибок. В спецификациях некоторых приемников горизонтальная точность указывается в RМS или СЕР без учета SA, делая эти приемники "более точными" чем те, в которых используются более консервативные меры ошибки.
2.1 Структура системы
Система «НАВСТАР» состоит из трех сегментов:
· космического сегмента;
· сегмента управления (CS - control sеgшеnt);
· сегмента потребителей.
Космический сегмент образован орбитальной группировкой, состоящей из 24 основных и 3 резервных навигационных космических аппаратов Block II (далее просто НКА). НКА распределены по шести плоскостям, которые разнесены по долготе на 60˚. В каждой плоскости находится четыре, и, возможно, один резервный НКА,которые двигаются по круговым орбитам с наклонением 55˚ и с полуосью около 26,5 тыс.км. Период обращения НКА составляет 12 часов.
Сегмент управления состоит из:
· Основной станции контроля и управления;
· Резервной станция контроля и управления;
· Четырех наземных антенн слежения;
· Шести наземных станций слежения.
Основная станция контроля и управления расположена на авиабазе Шривер, шт. Колорадо. Станции слежения расположены вдоль экватора, что обеспечивает благоприятные условия для наблюдения за НКА.
С помощью наземного сегмента управления осуществляются высокоточные измерения параметров орбит НКА, которые собираются и обрабатываются. Результатом обработки является информация об орбите, частотно временные поправки, ионосферные поправки. Полученная информация передается на борт НКА для последующей ретрансляции потребителю. Частота обновления ретрансляционной информации приблизительно раз в два часа.
Сегмент пользователей «НАВСТАР» составляют приемники GPS и сообщество пользователей системы. Приемники GPS преобразовывают сигналы спутников в оценки местоположения, скорости и времени. Приемники GPS используются для навигации, позиционирования, коррекции времени и других целей.
Основная задача системы «НАВСТАР» - навигация в трехмерном пространстве. Существуют навигационные приемники для летательных аппаратов, кораблей, сухопутных транспортных средств и для индивидуального использования.
В системе «НАВСТАР» используется кодовое разделение сигналов (CDМA), все спутники излучают сигналы с одинаковой частотой. Каждый спутник системы «НАВСТАР» излучает два фазоманипулированных сигнала. Частота первого сигнала составляет  , а второго , а второго  . Сигнал несущей частоты , модулируется двумя двоичными последовательностями, каждая из которых образована путём суммирования по модулю 2 дальномерного кода и передаваемых системных и навигационных данных (сигнал с частотой 50 Гц, состоящий из информационных разрядов, которые описывают орбиты спутников системы «НАВСТАР», синхронизируют коррекцию и другие параметры системы), формируемых со скоростью 50 бит/с. На частоте . Сигнал несущей частоты , модулируется двумя двоичными последовательностями, каждая из которых образована путём суммирования по модулю 2 дальномерного кода и передаваемых системных и навигационных данных (сигнал с частотой 50 Гц, состоящий из информационных разрядов, которые описывают орбиты спутников системы «НАВСТАР», синхронизируют коррекцию и другие параметры системы), формируемых со скоростью 50 бит/с. На частоте  передаются две квадратурные компоненты, бифазно манипулированные двоичными последовательностями. Первая последовательность является суммой по модулю 2 точного дальномерного кода Р (precise) или засекреченного кода Yи навигационных данных. Вторая последовательность также является суммой по модулю 2 грубого С/А (открытого) кода и той же последовательности навигационных данных. передаются две квадратурные компоненты, бифазно манипулированные двоичными последовательностями. Первая последовательность является суммой по модулю 2 точного дальномерного кода Р (precise) или засекреченного кода Yи навигационных данных. Вторая последовательность также является суммой по модулю 2 грубого С/А (открытого) кода и той же последовательности навигационных данных.
Радиосигнал на частоте  бифазно манипулирован только одной из двух ранее рассмотренных последовательностей. Выбор модулирующей последовательности осуществляется по команде с Земли. бифазно манипулирован только одной из двух ранее рассмотренных последовательностей. Выбор модулирующей последовательности осуществляется по команде с Земли.
Каждый спутник использует свойственные только ему дальномерные коды С/А и Р(Y), что и позволяет разделять спутниковые сигналы. В процессе формирования точного дальномерного Р(Y) кода одновременно формируются метки времени спутникового сигнала.
Кроме описанных дальномерных кодов Р, Y, C/A в системе «НАВСТАР» предусмотрены нестандартные коды С/А (NSC) и Y(NSY), которые формируются при появлении неисправностей в бортовой аппаратуре какого-либо НИСЗ. Нестандартные коды отличаются от кодов исправных НИСЗ и не могут быть декодированы потребителем. Применение NSC и NSY в системе обеспечивает защиту потребителей от использования неправильной информации.
Каждый из сигналов, излучаемых на частотах  и и  , представляет собой ФМ несущую, манипуляция которой выполняется навигационным кодом, труднообнаруживаемым для военных и легкообнаруживаемым для гражданских. В первом случае используется сложный псевдошумовой код, обеспечивающий высокую точность местоопределения, скрытность, защиту от искусственных помех. Разделение излучений НИСЗ - кодовое (CDMA), каждый из них излучает свой навигационный код. Разделение сигналов одного и того же НИСЗ, излучаемых на частоте, фазовое (фазовый сдвиг , представляет собой ФМ несущую, манипуляция которой выполняется навигационным кодом, труднообнаруживаемым для военных и легкообнаруживаемым для гражданских. В первом случае используется сложный псевдошумовой код, обеспечивающий высокую точность местоопределения, скрытность, защиту от искусственных помех. Разделение излучений НИСЗ - кодовое (CDMA), каждый из них излучает свой навигационный код. Разделение сигналов одного и того же НИСЗ, излучаемых на частоте, фазовое (фазовый сдвиг ). ).
Навигационный код образуется из дальномерного кода и кода двоичной служебной информации в (data) путем их сложения по модулю 2. Легкообнаруживаемый дальномерный код С/А - код пониженной точности - имеет частоту синхронизации 1,023 МГц и период 1 мс. Высокоточный защищенный дальномерный код Р и излучаемый вместо него код Y (когда требуется препятствовать применению уводящей помехи при работе по сигналу Р) имеют одинаковую частоту синхронизации, равную 10,23 МГц, на порядок более высокую, чем у кода С/А.
В настоящем разделе описывается смысловое содержание и формат навигационного сообщения, передаваемого НКА «НАВСТАР» в навигационном радиосигнале.
Передаваемое в навигационных радиосигналах НКА «НАВСТАР» навигационное сообщение предназначено для проведения потребителями навигационных определений, привязки к точному времени и для планирования сеансов навигации.
По своему содержанию навигационное сообщение подразделяется на оперативную и неоперативную информацию.
Оперативная информация относится к тому НКА, с борта которого передается данный навигационный радиосигнал и содержит:
· оцифровку меток времени НКА;
· сдвиг шкалы времени НКА относительно шкалы времени системы «НАВСТАР»;
· относительное отличие несущей частоты излучаемого навигационного радиосигнала от номинального значения;
· эфемериды НКА и другие параметры.
Неоперативная информация содержит альманах системы, включающий в себя:
· данные о состоянии всех НКА системы (альманах состояния);
· сдвиг шкалы времени каждого НКА относительно шкалы времени системы «НАВСТАР» (альманах фаз);
· параметры орбит всех НКА системы (альманах орбит);
· сдвиг шкалы времени системы «НАВСТАР» относительно UTC(SU) и другие параметры. Это значение может использоваться приемником, чтобы установить UTC с точностью в пределах 100 ns.
Основное сообщение, передаваемое с каждого навигационного спутника GPS, формируется в виде кадра. Поток навигационных данных передается со скоростью 50 бит/сек. Длительность информационного символа «0» или «1» равна 20 мсек.
Кадр состоит из пяти подкадров. Подкадры с 1 по 3 содержат по 300 информационных символов. Триста информационных символов разделяются на 10слов по 30 символов в слове.
Подкадры 4 и 5 содержат по 25 страниц. Каждая страница состоит из 300 информационных символов (или разрядов), которые также разделены на 10 слов по 30 символов в слове.
Таким образом, сформированных кадр всегда содержит 1, 2, 3 подкадры, одну страницу из подкадра 4 и одну страницу из подкадра 5.
Поскольку каждая строка или страница имеет объем 300 символов, длительность символа 20 мсек, то время передачи кадра из пяти подкадров составляет 30 сек, время передачи строки (страницы)- 6 сек, время передачи всего со общения (25 кадров) - 12.5 мин. Период повторения подкадров 1-3 составляет 30 сек, периоды повторения страниц из подкадров 4 и 5 большее время, что обусловлено значимостью передаваемой информации. Формат сообщений подкадров 1-3 и строк (страниц) подкадров 4, 5 изображен на рисунке 2.1.
| Всего 300 бит (старшие разряды слева, младшие справа) |
| Слово 1 |
Слово 2 |
Слово 3 |
Слово 4 |
Слово 5 |
Слово 6 |
Слово 7 |
Слово 8 |
Слово 9 |
Слово 10 |
| TLM |
P |
HOW |
P |
P |
P |
P |
P |
P |
P |
P |
P |
| 1-24 |
6 |
1-24 |
6 |
1-24 |
6 |
1-24 |
6 |
1-24 |
6 |
1-24 |
6 |
1-24 |
6 |
1-24 |
6 |
1-24 |
6 |
1-24 |
6 |
| Разряды |
Разряды |
Разряды |
Разряды |
Разряды |
Разряды |
Разряды |
Разряды |
Разряды |
Разряды |
Рисунок 2.1 – Формат сообщений подкадров
Расположение информации, передаваемой с навигационного спутника системы «НАВСТАР» приведено на рисунке 2.2.
| Содержание кадра |
Содержание подкадра |
| Подкадр 1 |
Слово
TLM
|
Слово
HOW
|
Номер недели GPS, точность, состояние и параметры коррекции времени спутника |
| Подкадр 2 |
Слово
TLM
|
Слово
HOW
|
Информация об эфемеридах спутника |
| Подкадр 3 |
Слово
TLM
|
Слово
HOW
|
Информация об эфемеридах спутника |
Подкадр 4
(25 страниц)
|
Слово
TLM
|
Слово
HOW
|
Альманах и состояние спутников с номерами 25-32, конфигурация спутников, признаки, данные ионосферы и всемирной шкалы времени (UTC), специальные сообщения, резервные разряды |
Подкадр 5
(25 страниц)
|
Слово
TLM
|
Слово
HOW
|
Альманах и состояние спутников с номерами 1-2, опорное время, номер недели альманаха, резервные разряды |
Рисунок 2.2 – Расположение информации, передаваемой с навигационного спутника системы «НАВСТАР»
В формате (см. рисунок 2.1) после каждого слова имеется 6 проверочных битов, занимающих разряды 25-30 каждого слова. Информация передается старшими разрядами вперед.
Слово.
Каждое слово строки (страницы) подкадров 1-5 содержит 30 символов (разрядов). Шесть младших разрядов каждого слова имеют проверочные символы для контроля и проверки правильности передаваемой информации.
Строка (страница).
Каждая строка (страница) подкадров 1-5 начинается со слов TLM (первое слово), HOW (второе слово).
Первое слово телеметрии (TLM) включает преамбулу (8 старших разрядов), телеметрическое сообщение для санкционированных потребителей, два резервных разряда и 6 младших разрядов для проверочных символов.
Второе слово передачи (ключ, HOW) содержит 19 младших разрядов 29-разрядного Z-отсчета, три разряда (20, 21, 22) для идентификатора (ID) подкадра, два разряда (23, 24) резервных и 6 разрядов проверочных символов.
Идентификатор (ID) для подкадров 1, 2, 3, 4, 5 принимает соответственно значения: 001, 010, 011, 100, 101.
Z -
отсчет.
Каждый навигационный спутник формирует 1.5 - секундную эпоху (момент времени) для точного отсчета и привязки времени. Отсчет времени, установленный таким образом, называется Z - отсчетом.
Z - отсчет предоставляется потребителю в виде 29-разрядного двоичного числа. Десять старших разрядов (MSB) Z - отсчета являются двоичным представлением последовательного номера текущей недели. Отсчет недель лежит в пределах от 0 до 1023. Нулевое состояние соответствует той неделе, которая начинается с 1.5 - секундной эпохи в нулевой (приблизительно) временной точке всемирного времени (UTC). По окончании GPS - недели с номером 1023 номер недели сбрасывается в ноль. При этом потребитель при переходе от системного времени GPS к календарной дате предыдущие 1024 недели учитывает (прибавляет).
Неделя - это самая большая единица измерения времени в системе «НАВСТАР». Неделя определена как 604800 секунд. Т.е. неделя = 7 суток * 24часа * 60минут * 60 секунд = 604800секунд.
Нулевой отсчет времени GPS определен в полночь с 5 на 6 января 1980 года.
Девятнадцать следующих разрядов Z - отсчета, расположенных в слове 2 (HOW), определяются как количество 1.5 - секундных интервалов отсчитанных от момента перехода «конец/начало» любой недели. Отсчет лежит в пределах от О до 403199. Число 403199 есть количество 1.5 - секундных интервалов в неделе (в 604800 секундах).
В таблице 1.6 на конкретных данных приводится объяснение Z-счета.
В течение недели передаваемая в 17 старших разрядах слова 2 информация в десятичном эквиваленте изменяется в диапазоне от 0 до 100799 с шагом 1, что соответствует 6 секундам Т.е. продолжительности передачи информации 1 подкадра. Можно отметить, что за неделю каждый навигационный спутник транслирует потребителям 100800 подкадров (строк).
Начало каждого подкадра соответствует отсчету, указанному в 17 старших разрядах слова 2 переданных в предыдущем подкадре.
Таблица 2.1 – Объяснение Z-счета
| Десятичный эквивалент Z-счета 1 шаг = 1.5 сек |
19 двоичных разрядов Z-счета (курсивом выделены 17 совпадающих старших разрядов) |
17 старших двоичных разрядов Z-счета (передаются в подкадре I-1) |
Десятичный эквивалент 17 старших разрядов Z-счета 1 шаг = 6 сек |
Подкадр |
| 403160 |
1100010011011
01
1
0
00 |
1100010011011
01
1
0
|
100790 |
I |
| 403161 |
1100010011011011001 |
| 403162 |
1100010011011011010 |
| 403163 |
1100010011011011011 |
| 403164 |
1100010011011
01
1
1
00 |
1100010011011
01
1
1
|
100791 |
I+1 |
| 403165 |
1100010011011011101 |
| 403166 |
1100010011011011110 |
| 403167 |
1100010011011011111 |
| 403168 |
1100010011011
1000
00 |
1100010011011
1000
|
100792 |
I+2 |
| 403169 |
1100010011011100001 |
| 403170 |
1100010011011100010 |
| 4031971 |
1100010011011100011 |
| 403172 |
1100010011011
1001
00 |
1100010011011
1001
|
100793 |
I+3 |
| 403173 |
1100010011011
100101
|
| 403174 |
1100010011011
100110
|
| 403175 |
1100010011011
100111
|
Содержание и расположение данных подкадра 1 приведено в таблице 2.2.
Таблица 2.2 – Информация подкадра 1
| № |
Расположение информации: слово, разряды |
Символьное обозначение |
Содержание информации |
| 1 |
Слово 3
Разряды 1-10
|
WH |
Номер текущей недели GPS в начале передачи данных. Десять старших разрядов 29-ти разрядного Z-счета |
| 2 |
Слово 3
Разряды 11-12
|
C/A или P на L2 |
Включение C/A или P кода для частоты L2 |
| 3 |
Слово 3
Разряды 13-16
|
URA |
Точность измерения дальности потребителем (15 градаций от 2 метров до 4096 метров, плюс 16 градация – «не использовать») |
| 4 |
Слово 3
Разряды 17-22
|
SVHEALTH |
Состояние спутника: старший разряд «0» - вся навигационная информация в норме; старший разряд «1» - часть навигационной информации не достоверна |
| 5 |
Слово 3
Разряды 23-24
Слово 8
Разряды 1-8
|
IODC |
Идентификатор набора параметров времени. Значения передаваемого IODC отличается от любого другого значения IODC, передаваемого в течении предыдущих 7 дней. 8 младших разрядов IODC соответствуют 8 разрядам IODE подкадров 2 и 3 |
| 6 |
Слово 4
Разряды 1
|
L2 P |
Признак данных для P-кода на частоте L2 |
| 7 |
Слово 7
Разряды 17-24
|
TGD
|
Поправка для учета группового времени задерживания |
| 8 |
Слово 8
Разряды 9-24
|
toc
|
Параметры коррекции бортовой шкалы времени |
| 9 |
Слово 9
Разряды 1-8
|
at2
|
| 10 |
Слово 9
Разряды 9-24
|
at1
|
| 11 |
Слово 10
Разряды 1-22
|
at0
|
Общая точность потребителя (URA) - статистический индикатор всего диапазона точностей, относящихся к специфике навигационного спутника. URA- это целое число от О до 15, при URA = 15 прогноз по точности отсутствует и потребителю предлагается использовать данные на собственный риск. Еще одно определение URA - прогнозируемая точность определения дальности потребителем до навигационного спутника. Точностные параметры аппаратуры потребителя URA не учитываются.
Содержание и расположение эфемеридной информации GPS приведено в таблице 2.3.
Таблица 2.3 – Эфемеридная информация GPS
| № |
Расположение информации: слово, разряды |
Символьное обозначение |
Содержание информации |
| Подкадр 2 |
| 1 |
Слово 3
Разряды 1-8
|
IODC |
Идентификатор набора данных эфемерид. Используется для идентификации подкадров 2 и 3 при обновлении содержащейся в них информации. Критерий обновления – несовпадения 8 младших разрядов IODC в подкадре 1 с IODC подкадров 2 и 3 |
| 2 |
Слово 3
Разряды 9-24
|
Crs
|
Амплитуда синусной гармонической поправки к радиусу орбиты спутника |
| 3 |
Слово 4
Разряды 1-16
|
 |
Отличие среднего движения от расчетного |
| 4 |
Слово 4
Разряды 17-24
Слово 5
Разряды 1-24
|
M0
|
Средняя аномалия на время привязки |
| 5 |
Слово 6
Разряды 1-16
|
Cuc
|
Амплитуда косинусной гармонической поправки к аргументу широты |
| 6 |
Слово 6
Разряды 17-24
Слово 7
Разряды 1-24
|
E |
Эксцентриситет |
| 7 |
Слово 8
Разряды 1-16
|
Cus
|
Амплитуда синусной гармонической поправки к аргументу широты |
| 8 |
Слово 8
Разряды 17-24 Слово 9
Разряды 1-24
|
 |
Корень квадратный из большой полуоси орбиты |
| 9 |
Слово 10
Разряды 1-16
|
toe
|
Опорное время привязки передаваемых эфемерид |
| 10 |
Слово 10
Разряды 17-22
|
AODO |
Не эфемеридный параметр, характеризующий изменение срока службы данных |
| Подкадр 3 |
| 11 |
Слово 3
Разряды 1-16
|
Cic
|
Амплитуда косинусной гармонической поправки к углу наклонения |
| 12 |
Слово 3
Разряды 17-24
Слово 4
Разряды 1-24
|
Ω0
OMEGA 0
|
Долгота восходящего угла орбитальной плоскости на недельную эпоху |
| 13 |
Слово 5
Разряды 1-16
|
Cis
|
Амплитуда синусной гармонической поправки к углу наклонения |
| 14 |
Слово 5
Разряды 17-24
Слово 6
Разряды 1-24
|
i0
|
Угол наклонения орбиты спутника наклонение орбиты спутника |
| 15 |
Слово 7
Разряды 1-16
|
Crc
|
Амплитуда косинусной гармонической поправки к радиусу орбиты спутника |
| 16 |
Слово 7
Разряды 17-24
Слово 8
Разряды 1-24
|
Ω |
Аргумент перигея |
| 17 |
Слово 9
Разряды 1-24
|
Ω
OMEGADOT
|
Скорость изменения прямого восхождения |
| 18 |
Слово 10
Разряды 1-8
|
IODE |
Идентификатор набора данных эфемерид. Используется для идентификации подкадров 2 и 3 при обновлении содержащейся в них информации. Критерий обновления – несовпадения 8 младших разрядов IODC в подкадре 1 с IODC подкадров 2 и 3 |
| 19 |
Слово 10
Разряды 9-22
|
IDOT |
Скорость изменения угла наклона |
Содержание и расположение информации альманаха GPS приведено в таблице 2.4.
Таблица 2.4 – Информация по альманаху GPS
| № |
Расположение информации: слово, разряды |
Символьное обозначение |
Содержание информации |
| Подкадр 4, строки со 2 по5 и с 7 по 10; подкадр 5, строки с 1 по 24 |
| 1 |
Слово 3
Разряды 9-24
|
e |
Эксцентриситет (пониженная точность) |
| 2 |
Слово 4
Разряды 1-8
|
toa
|
Опорное время привязки альманаха |
| 3 |
Слово 4
Разряды 9-24
|
δi
|
Отклонение от номинального угла наклонения орбиты спутника. За номинальный угол наклонения принята величина равная i0
= 0.3 полуцикла |
| 4 |
Слово 5
Разряды 1-16
|
Ω
OMEGADOT
|
Скорость изменения прямого восхождения (пониженная точность) |
| 5 |
Слово 6
Разряды 1-24
|
|
Корень квадратный из большой полуоси орбиты спутника (пониженная точность) |
| 6 |
Слово 7
Разряды 1-24
|
Ω0
OMEGA 0
|
Долгота восходящего узла орбитальной плоскости на недельную эпоху (пониженная точность) |
Слово 8
Разряды 1-24
|
ω |
Аргумент перигея (пониженная точность) |
Слово 9
Разряды 1-24
|
M0
|
Средняя аномалия на время привязки (пониженная точность) |
Слово 10
Разряды 1-8, 20-22
|
af0
|
Коэффициент (постоянной составляющей) аппроксимации временных параметров альманаха |
Слово 10
Разряды 9-19
|
af1
|
Коэффициент (первого порядка составляющей) аппроксимации временных параметров альманаха |
| Подкадр 5, строка 25 |
Слово 3
Разряды 9-16
|
toa
|
Опорное время привязки альманаха в неделе с номером WNa
|
Слово 3
Разряды 17-24
|
WNa
|
Полный номер недели, к которой относится опорное время привязки альманаха (toa
) |
Содержание и расположение информации для привязки системного времени GPS к UTC приведено в таблице 2.5.
Таблица 2.5 – Информация по параметрам UTC для привязки системного времени GPS к UTC
| № |
Расположение информации: слово, разряды |
Символьное обозначение |
Содержание информации |
Цена деления младшего разряда |
Единицы измерений |
| Подкадр 4, строка 18 |
| 1 |
Слово 6
Разряды 1-24
|
A1
|
Коэффициенты при первом и нулевом членах аппроксимирующего полинома |
2-50
|
Секунда |
| 2-30
|
секунда |
| 2 |
Слово 7
Разряды 1-24
Слово 8
Разряды 1-8
|
A0
|
| 3 |
Слово 9
Разряды 9-16
|
tot
|
Опорное время UTC |
212
|
Секунда |
| 4 |
Слово 8
Разряды 17-24
|
WNt
|
Восемь младших разрядов текущей недели, указанной в подкадре 1 словом 3 |
1 |
Недели |
| 5 |
Слово 9
Разряды 1-8
|
ΔtLS
|
Секундная коррекция |
1 |
Секунда |
| 6 |
Слово 9
Разряды 9-16
|
WNLSF
|
Восемь младших разрядов недели, на которой планируется или проведена односекундная коррекция времени |
1 |
Недели |
| 7 |
Слово 9
Разряды 17-24
|
DN |
День недели WNLSF
, в конце которого планируется или проведена односекундная коррекция времени |
1 |
Сутки |
| 8 |
Слово 10
Разряды 1-8
|
ΔtLSF
|
Значение поправки, обусловленная скачками секунд |
1 |
Секунда |
Содержание и расположение информации для ионосферной коррекции GPS приведено в таблице 2.6.
Таблица 2.6 – Информация по параметрам для ионосферной коррекции
| № |
Расположение информации: слово, разряды |
Символьное обозначение |
Содержание информации |
Цена деления младшего разряда |
Единицы измерений |
| Подкадр 4, строка 18 |
| 1 |
Слово 3
Разряды 9-16
|
α0
|
Коэффициенты позволяют потребителю применить модель ионосферы для расчета ионосферной задержки. У всех коэффициентов старший разряд является знаковым (+ или -) |
2-30
|
Секунда/ полуцикл |
| 2 |
Слово 3
Разряды 17-24
|
α1
|
2-27
|
Секунда/ полуцикл |
| 3 |
Слово 4
Разряды 1-8
|
α 2
|
2-24
|
Секунда/ (полуцикл)2
|
| 4 |
Слово 4
Разряды 9-16
|
α 3
|
2-24
|
Секунда/ (полуцикл)3
|
| 5 |
Слово 4
Разряды 17-24
|
β 0
|
211
|
Секунда |
| 214
|
Секунда/ (полуцикл) |
| 6 |
Слово 5
Разряды 1-8
|
β 1
|
| 216
|
Секунда/ (полуцикл)2
|
| 7 |
Слово 5
Разряды 9-16
|
β 2
|
| 216
|
Секунда/ (полуцикл)3
|
| 8 |
Слово 5
Разряды 17-24
|
β 3
|
К числу потребителей СРНС второго поколения относятся наземные объекты (подвижные и неподвижные), летательные аппараты (высокодинамичные и низкодинамичные) и др. В зависимости от типа потребителя требования к точностным характеристикам, числу измеряемых координат и составляющих скорости, допустимому времени вхождения в синхронизм, массогабаритным показателям и стоимости аппаратуры потребителя колеблются в широких пределах. Для наземных и морских объектов достаточно ограничиться измерением двух координат и двух составляющих скорости. Для летательных аппаратов число измеряемых координат и составляющих скорости возрастает до трех. Поэтому номенклатура модификаций бортовой аппаратуры весьма обширна.
Основными задачами, решаемыми аппаратурой потребителя, являются: выбор рабочего созвездия ИСЗ, поиск и опознавание навигационных сигналов ИСЗ, введение в синхронизм систем слежения по времени запаздывания и фазе несущей частоты дальномерных сигналов, измерение времени запаздывания и доплеровского сдвига частоты, выделение и расшифровка содержания навигационного (информационного) сообщения, расчет координат ИСЗ на момент навигационных измерений, решение навигационной задачи (определение координат и составляющих вектора скорости потребителя, поправок к сдвигу шкал времени и частот), отображение вычисленных данных на информационном табло.
На вход аппаратуры потребителя поступают сигналы от навигационных спутников, находящихся в зоне радиовидимости. Так как для решения навигационной задачи необходимо измерить псевдодальности и псевдоскорости относительно, как минимум, четырех ИСЗ, то АП должна быть многоканальной (от 4 до 12 каналов при работе по одной из систем и более 12 при совмещенной работе по системам ГЛОНАСС и NAVSTAR).
Современные АП являются аналого-цифровыми системами, сочетающими аналоговую и цифровую обработку сигналов. Переход на цифровую обработку осуществляется на одной из промежуточных частот. Основой типового варианта АП являются антенный блок, радиочастотный тракт, коррелятор и вычислительное устройство, представленные на рис. 2.3.
В антенном блоке (АБ) совокупность сигналов от ИСЗ, принятых антенной, усиливается в предварительном усилителе и фильтруется во всей полосе (от 1570 до 1625 МГц в совмещенной АП) несущих частот полосовым фильтром.
В качестве антенны часто используется микрополосковая, что обусловлено ее малой массой и габаритными размерами, простотой изготовления и дешевизной. Микрополосковая антенна состоит из двух параллельных проводящих слоев, разделенных диэлектриком; нижний проводящий слой является заземленной плоскостью, верхний ― собственно излучателем антенны (по форме излучатель может быть прямоугольником, эллипсом, пятиугольником и т.д.). Микрополосковая антенна имеет диаграмму направленности, обеспечивающую прием сигналов правосторонней круговой поляризации из верхней полусферы. Применяются и другие типы слабонаправленных антенн.
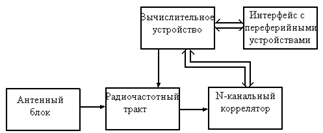
Рис. 2.3. Структурная схема аппаратуры потребителя
Полосовой фильтр осуществляет фильтрацию сигналов в полосе частот  МГц. На выходе блока имеется радиочастотный соединитель, к которому подключается коаксиальный кабель, соединяющий АБ с радиочастотным трактом. МГц. На выходе блока имеется радиочастотный соединитель, к которому подключается коаксиальный кабель, соединяющий АБ с радиочастотным трактом.
Радиочастотный тракт навигационного приемника является многоканальным устройством, в котором, как отмечалось выше, проводится аналоговое усиление сигналов, фильтрация и преобразование несущей частоты сигналов ИСЗ (понижение частоты), а также преобразование аналогового сигнала в цифровую форму. Так как в СРНС ГЛОНАСС сигнал от каждого из спутников имеет свою несущую частоту, то каждый канал должен быть настроен на частоту сигнала одного из ИСЗ и селектировать частоты сигналов других ИСЗ. Схема такого приемника приведена на рис. 2.4.
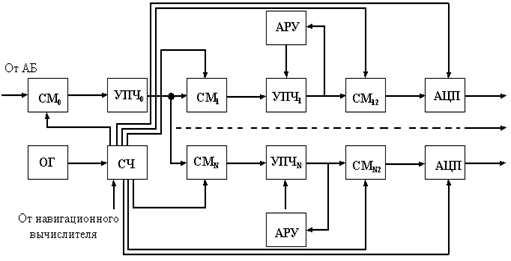
Рис. 2.4. Радиочастотный тракт навигационного приемника
Одним из принципиальных моментов разработки навигационного приемника является выбор частотного плана. Под частотным планом подразумевается выбор частоты задающего генератора, частот гетеродинирования и дискретизации для того, чтобы минимизировать уровень паразитных гармоник, возникающих в схеме из-за различных нелинейностей и шумов и влияния цифровой части приемника.
Для этого предварительно выбирают частоту задающего генератора, промежуточные частоты и частоты гетеродиниривания, а затем определяют характеристики фильтров и коэффициенты усиления каскадов. Далее анализируют получившуюся архитектуру и выявляют все нелинейные элементы, в результате работы которых могут возникать гармоники, попадающие в спектр сигнала. Варьируя промежуточные частоты, частоту дискретизации, характеристики смесителей, усилителей и фильтров, подбирают конфигурацию, обеспечивающую оптимальный прием сигнала, при котором в спектре обрабатываемого сигнала от нелинейных преобразований появляются только дальние гармоники; эти гармоники малы и не оказывают серьезного влияния на сигнал.
Кроме этого, частоту дискретизации выбирают кратной частоте задающего генератора и всем промежуточным частотам.
Выбор числа уровней квантования в аналого-цифровом преобразователе (АЦП) определяется, в основном, типом помех на входе приемника. Если основным видом помех является белый гауссовский шум, то возможно применение малоуровневого квантования вплоть до бинарного. Если помеха узкополосная стационарная, то необходимо большее число уровней квантования.
В приведенной схеме использовано трехкратное понижение частоты сигналов (используется и двукратное понижение частоты). Первое понижение частоты до уровня  проводится, для всех принятых сигналов, смесителем СМ0
. После общего усиления и фильтрации сигналов усилителем промежуточной частоты УПЧ0
с полосой пропускания для совмещенной АП проводится, для всех принятых сигналов, смесителем СМ0
. После общего усиления и фильтрации сигналов усилителем промежуточной частоты УПЧ0
с полосой пропускания для совмещенной АП  , сигнал поступает в N
каналов, в каждом из которых проводится второе преобразование частоты (до значения , сигнал поступает в N
каналов, в каждом из которых проводится второе преобразование частоты (до значения  ), ориентированное на прием сигнала от конкретного ИСЗ. Полосу пропускания канального УПЧ ), ориентированное на прием сигнала от конкретного ИСЗ. Полосу пропускания канального УПЧ выбирают таким образом, чтобы выделялся сигнал одного из спутников и селектировались сигналы других. Третье понижение частоты проводят до уровня выбирают таким образом, чтобы выделялся сигнал одного из спутников и селектировались сигналы других. Третье понижение частоты проводят до уровня  . .
Опорные сигналы, поступающие на смесители, формируются синтезатором частот СЧ из опорной частоты  опорного генератора ОГ. Управление работой синтезатора частот осуществляется по сигналам, поступающим от навигационного вычислителя. Опорный генератор – это устройство, во многом определяющее качество работы АП в целом. От ОГ в значительной степени зависят такие параметры, как время получения первого отсчета, точность определения координат потребителя, надежность, уровень потребления энергии, масса и габариты аппаратуры. опорного генератора ОГ. Управление работой синтезатора частот осуществляется по сигналам, поступающим от навигационного вычислителя. Опорный генератор – это устройство, во многом определяющее качество работы АП в целом. От ОГ в значительной степени зависят такие параметры, как время получения первого отсчета, точность определения координат потребителя, надежность, уровень потребления энергии, масса и габариты аппаратуры.
На выходе приемника аналоговые сигналы частоты в АЦП преобразуются в цифровую форму.
Коррелятор выполняет одну из основных задач. Для оценки координат и вектора скорости потребителя необходимо измерить радионавигационные параметры сигнала: задержку распространения и доплеровское смещение частоты. Эти параметры нужно измерить для сигналов, приходящих от каждого спутника.
Теория оптимальной фильтрации позволяет решить эту задачу в общем виде. На выходе оптимального фильтра получаем оценку измеряемого параметра. Однако алгоритмы оптимального приёма очень сложны и в настоящее время не реализуются в существующих приемниках. Для упрощения приемной аппаратуры задачу получения оценок координат и вектора скорости потребителя разбивают на два этапа обработки: первичную и вторичную. На этапе первичной обработки решается задача измерения навигационных параметров, а на этапе вторичной обработки вычисляются координаты и вектор скорости потребителя с использованием полученных на первом этапе оценок радионавигационных параметров и других навигационных функций. Большая часть алгоритмов первичной обработки производится в блоке цифровой обработки сигнала навигационного приёмника – в корреляторе.
Успешное решение задачи оценивания параметров радиосигнала (первичная обработка) возможно лишь в том случае, когда начальное рассогласование между истинным значением оцениваемого параметра и его оценкой достаточно мало. Это обусловлено нелинейностью радиотехнической системы слежения и связанной с этим необходимостью «захвата» сигнала для дальнейшего слежения за оцениваемым параметром. В связи с этим в радиотехнических системах, в том числе и радионавигационных, различают два режима: поиск сигнала и слежение. В режиме поиска сигнала производится грубая, но достаточная для захвата системой слежения, оценка параметров сигнала – временной задержки и частоты. В режиме слежения после захвата сигнала системами автоматической подстройки частоты (АПЧ), фазы (ФАПЧ) и времени (АПВ) осуществляется измерение информационных параметров сигнала.
Поиск сигнала и оценку его параметров проводят по каждому навигационному спутнику отдельно, поэтому в дальнейшем рассматриваются алгоритмы обработки только одного сигнала.Поиск и оценка параметров сигнала производится в соответствии с принципом максимального правдоподобия, который для сигналов с неизвестной начальной фазой сводятся к корреляционной обработке сигнала, представленного в виде двух квадратурных составляющих. Значения оцениваемого параметра  принимают равновероятными. При этом ищут такую оценку принимают равновероятными. При этом ищут такую оценку  , которая будет давать максимум условной плотности вероятности: , которая будет давать максимум условной плотности вероятности:
где  — условная плотность вероятности реализации входного процесса (входного сигнала) — условная плотность вероятности реализации входного процесса (входного сигнала)  при заданных значениях при заданных значениях  . .
Расписав это уравнение и раскрыв формулу условной плотности вероятности, можно получить следующую формулу для оптимальной оценки параметров принятого сигнала:
где   – огибающая на выходе согласованного фильтра; – огибающая на выходе согласованного фильтра;  – синфазная составляющая огибающей; – синфазная составляющая огибающей;  – квадратурная составляющая огибающей. – квадратурная составляющая огибающей.
При этом корреляционной обработке могут подвергаться как непрерывные сигналы, так и дискретные.
Квадратурные составляющие огибающей на выходе согласованного фильтра при оценке времени и частоты ( – синфазная, – синфазная,  – квадратурная) записываются в следующем виде – квадратурная) записываются в следующем виде
 (2.1) (2.1)
В этих выражениях:  – частота сигнала, на которой производится корреляционная обработка. Для рассматриваемой схемы это третья промежуточная, равная 4 МГц; – частота сигнала, на которой производится корреляционная обработка. Для рассматриваемой схемы это третья промежуточная, равная 4 МГц;  – модулирующий дальномерный сигнал; – модулирующий дальномерный сигнал;  – копия дальномерного сигнала, формируемая в АП и сдвигаемая на переменную величину t. – копия дальномерного сигнала, формируемая в АП и сдвигаемая на переменную величину t.
Поиск решения предполагает перебор всех возможных значений из области возможных значений задержек  и доплеровских смещений частоты и доплеровских смещений частоты  разбивается на небольшие участки. Согласованный фильтр последовательно дискретно перестраивается по множеству возможных значений анализируемых параметров. Для каждой из пар разбивается на небольшие участки. Согласованный фильтр последовательно дискретно перестраивается по множеству возможных значений анализируемых параметров. Для каждой из пар  вычисляют вычисляют  и в качестве оптимальной оценки выбирается та пара, которой соответствует максимальное значение и в качестве оптимальной оценки выбирается та пара, которой соответствует максимальное значение  . Пара анализируемых параметров образует элементарную ячейку на плоскости поиска. Число ячеек поиска сигнала зависит от максимального доплеровского смещения частоты входного сигнала, составляющего ±5 кГц. Значение элементарной ячейки поиска по частоте определяется полосой захвата схемы частотной автоподстройки и составляет @500 Гц. Поэтому число анализируемых ячеек по частоте равно 20. Значение анализируемой ячейки по задержке сигнала равно длительности элементарного символа дальномерного кода, поэтому для системы «Глонасс» число ячеек равно 511. Соответственно, общее число ячеек поиска составит = 10220. Интегрирование по формулам (9.11) производится на интервале времени, равном периоду дальномерного кода Т = 1 мс. Поэтому, если один канал приёмника производит поиск сигнала одного спутника, то на это тратится время (в наихудшем случае), равное 10,22 с. Современные навигационные приёмники имеют многоканальную структуру, что позволяет использовать одновременно несколько каналов для поиска сигнала одного спутника. Кроме того, в памяти приёмника может храниться информация о параметрах движения спутников (режим так называемого горячего старта), поэтому перед поиском сигнала может быть вычислено приблизительное значение доплеровского сдвига, что существенно уменьшает число анализируемых ячеек . Пара анализируемых параметров образует элементарную ячейку на плоскости поиска. Число ячеек поиска сигнала зависит от максимального доплеровского смещения частоты входного сигнала, составляющего ±5 кГц. Значение элементарной ячейки поиска по частоте определяется полосой захвата схемы частотной автоподстройки и составляет @500 Гц. Поэтому число анализируемых ячеек по частоте равно 20. Значение анализируемой ячейки по задержке сигнала равно длительности элементарного символа дальномерного кода, поэтому для системы «Глонасс» число ячеек равно 511. Соответственно, общее число ячеек поиска составит = 10220. Интегрирование по формулам (9.11) производится на интервале времени, равном периоду дальномерного кода Т = 1 мс. Поэтому, если один канал приёмника производит поиск сигнала одного спутника, то на это тратится время (в наихудшем случае), равное 10,22 с. Современные навигационные приёмники имеют многоканальную структуру, что позволяет использовать одновременно несколько каналов для поиска сигнала одного спутника. Кроме того, в памяти приёмника может храниться информация о параметрах движения спутников (режим так называемого горячего старта), поэтому перед поиском сигнала может быть вычислено приблизительное значение доплеровского сдвига, что существенно уменьшает число анализируемых ячеек  . .
Значение  сравнивается с порогом и принимается решение о наличии или отсутствии сигнала. В том случае, если сигнал не обнаружен, переходят к следующей ячейке. В противном случае, приёмник переходит в режим захвата и непрерывного сопровождения по частоте и задержке. Если следящие системы по задержке и доплеровской частоте успешно захватывают сигнал, то из навигационного вычислителя (процессора) приходит команда о прекращении поиска, а противном случае, процедура поиска продолжается. сравнивается с порогом и принимается решение о наличии или отсутствии сигнала. В том случае, если сигнал не обнаружен, переходят к следующей ячейке. В противном случае, приёмник переходит в режим захвата и непрерывного сопровождения по частоте и задержке. Если следящие системы по задержке и доплеровской частоте успешно захватывают сигнал, то из навигационного вычислителя (процессора) приходит команда о прекращении поиска, а противном случае, процедура поиска продолжается.
Вычисление синфазной и квадратурной производится в корреляторе. Формирование синфазной и квадратурной составляющих I
и Q необходимо как в режиме поиска, так и в режиме слежения за параметрами сигнала. В режиме слежения необходимо формировать дискриминационные характеристики для систем слежения за фазой и задержкой сигнала. Если для формирования фазового дискриминатора достаточно иметь интегралы (9.11), то для дискриминатора по задержке сигнала необходимо формировать смещённые на величину  составляющие составляющие  (Е
– early – опережающий), (Е
– early – опережающий),  (L— late – запаздывающий), (L— late – запаздывающий),  и и  по формулам по формулам
 (2. 2) (2. 2)
Величина  , как правило, равна длительности одного элементарного символа дальномерного кода. На рис. 9.9 показана обобщённая структурная схема стандартного коррелятора. Корреляционные интегралы , как правило, равна длительности одного элементарного символа дальномерного кода. На рис. 9.9 показана обобщённая структурная схема стандартного коррелятора. Корреляционные интегралы  с выходов накапливающих сумматоров используются в программных алгоритмах процессора для реализации петель слежения за фазой и задержкой сигнала. Кроме того, в опорных генераторах коррелятора (генератор отсчётов промежуточной частоты, генератор дальномерного кода, генератор тактовой частоты дальномерного кода) формируются данные, необходимые для вычисления параметров с выходов накапливающих сумматоров используются в программных алгоритмах процессора для реализации петель слежения за фазой и задержкой сигнала. Кроме того, в опорных генераторах коррелятора (генератор отсчётов промежуточной частоты, генератор дальномерного кода, генератор тактовой частоты дальномерного кода) формируются данные, необходимые для вычисления параметров  . Далее эти данные используются в процессоре. На этапе поиска эти данные необходимы для того, чтобы определить «грубые» значения доплеровской частоты и задержки дальномерного кода, необходимые для захвата системами слежения. После захвата сигнала системами слежения эти 'уточнённые' данные используются во вторичной обработке для вычисления псевдодальностей и пседоскоростей. . Далее эти данные используются в процессоре. На этапе поиска эти данные необходимы для того, чтобы определить «грубые» значения доплеровской частоты и задержки дальномерного кода, необходимые для захвата системами слежения. После захвата сигнала системами слежения эти 'уточнённые' данные используются во вторичной обработке для вычисления псевдодальностей и пседоскоростей.

Рис. 2.5. Структурная схема одного канала стандартного коррелятора
В литературе довольно подробно описаны алгоритмы работы схем слежения за фазой (ФАП – фазовой автоподстройки частоты) и задержкой (ССЗ – схема слежения за задержкой) сигнала. Каждая из них включает в себя дискриминатор, фильтр и генератор опорного напряжения (для системы ФАП – генератор промежуточной частоты, для системы ССЗ – генератор тактовой частоты дальномерного кода). Часть алгоритма реализуется в аппаратной части приёмника – корреляторе, замыкается контур слежения через программные алгоритмы процессора, который выдаёт в коррелятор управляющие воздействия на генераторы опорных сигналов.
Структура большинства схем корреляторов различных производителей, так или иначе, основывается на классической схеме, изображённой на рис. 2.5. Задача любого коррелятора сводится к тому, чтобы под управлением процессора сформировать корреляционные интегралы по формулам (2.1) и (2.2) и измерительные данные в опорных генераторах.
Навигационный вычислитель решает следующие задачи: цифровая обработка синфазной и квадратурной составляющих I
,
Q
для поиска сигналов по задержке и частоте, а также слежения за фазой и задержкой сигнала (алгоритмы первичной обработки); преобразование радионавигационных параметров в навигационные (алгоритмы вторичной обработки); демодуляция навигационного сообщения; форматирование и дешифрация эфемеридной информации; расчет прогнозируемых значений ошибок; накопление и хранение альманаха. Навигационному вычислителю переданы также диспетчерские функции управления первичной обработкой, что необходимо из-за наличия многих спутников в зоне видимости и возможности работы по всем или части ИСЗ. В современной и перспективной АП, работающей по сигналам систем ГЛОНАСС и NAVSTAR, возникает дополнительная необходимость управления работой по двум системам.
В современных АП навигационные вычислители реализуются на базе сигнальных процессоров. Этому способствует обширный выбор процессоров, предоставляемый разработчикам фирмами производителями, доступность технической информации, наличие мощных инструментальных и программных средств отладки (позволяющие писать программы на языке высокого уровня).
Глобальная Система Определения Координат Местоположения (GPS) является системой определения местоположения на базе спутниковой информации, которая непрерывно функционирует в течение 24 часов каждый день. GLONASS является такой же системой. В настоящее время планируется дополнить эти системы геостационарными спутниками с передатчиками, работающими в том же частотном диапазоне [7].
В интегральном составе эти системы называют Глобальными Навигационными Спутниковыми Системами (GNSS).
В основе метода дифференциальной навигации, лежит относительное постоянство значительной части погрешности измерения навигационной величины или погрешности расчета координат во времени и в пространстве. Необходимость использования дифференциального режима СРНС определяется стремлением удовлетворить наиболее жесткие требования навигационного обеспечения таких задач, как посадка воздушных судов, мореплавание в проливных зонах и узкостях, геодезическая привязка и т.п.
Дифференциальный режим GNSS достигается за счет размещения опорной станции с приемником GNSS в точке с известными координатами, определения поправок к сигналам дальности спутников и передачи этих поправок пользователям. Это исключает большую часть ошибок смещения, общих для всех приемников и значительно улучшает позиционную точность. Точность после этого ограничивается шумами приемника пользователя, межканальными смещениями и неопределенностями дифференциальной станции.
Специальный комитет 104 RTCM (SC-104) “Дифференциальное функционирование GNSS” имеет технические и официальные издания, а также сформулированные рекомендации в следующих областях:
1. Сообщение с данными и формат - Сообщение, элементы которого определяют поправки, сообщения о состоянии, параметрах станции и служебных данных определены в деталях. Они структурированы в формат данных, подобных тому, в котором выдаются сигналы GPS спутников, но при этом используются форматы переменной длины.
2. Интерфейс пользователя - Определен стандартный интерфейс, который позволяет использовать приемник во взаимодействии с множеством различных линий передачи данных. Например, при использовании стандарта, приемник может применяться со спутниковой или радиомаячной линией передачи данных.
Ранее комитет решил, что поправки должны относиться к измерениям псевдодальности, а не к измеренному положению, несмотря на то, что результирующее сообщение значительно длиннее. Причина заключается в том, что пользователь и опорная станция могут использовать различные спутники, в зависимости от большого числа условий. Если это происходит, даже в том случае, когда три из четырех спутников одинаковы, позиционная ошибка от одного не общего спутника может быть слишком велика.
Причины, по которым пользователь и опорная станция отрабатывают данные от разных спутников, следующие:
· Критерий выбора спутников приемниками может быть разным.
· Рельеф или кривизна земли могут затенять низко расположенные спутники от пользователя или опорной станции.
· Приемник пользователя может применять стратегию использования всех спутников, находящихся в поле зрения, по которой все видимые спутники используются для определения местоположения.
· Набор спутников доступных в месте нахождения пользователя может отличаться от того, который доступен в месте размещения опорной станции. Передаваемые поправки к псевдодальностям всех спутников, которые находятся в поле зрения опорной станции, могут использоваться приемником пользователя в дифференциальном режиме (т.е. выбираются только те поправки, которые относятся к спутникам, находящимся в поле зрения пользователя) для определения местоположения. Геометрия дифференциальной GNSS показана на рисунке 3.1.

Рисунок 3.1 – Геометрия дифференциальной GNSS.
Дифференциальный режим GPS и/или GLONASS предполагает получение точностей 1-10 метров для динамических навигационных приложений. При использовании кинематической технологии обработки фазы несущей GNSS в дифференциальном режиме можно достичь точностей лучше, чем 10 см для небольших дальностей, менее 20 км. Базовая концепция дифференциального режима GNSS подобна той, какая используется в дифференциальном режиме LORAN-C, в дифференциальном режиме OMEGA и в режиме транслокации, применяемом в TRANSIT.
Дифференциальная технология работает, если преобладающие ошибки являются систематическими ошибками, вызванными причинами, находящимися вне приемника. Это относится к случаю GPS и GLONASS [7]
3.1 Принцип дифференциального режима
Дифференциальный режим работы системы состоит в следующем. Сигналы с навигационных спутников принимаются не только конечным потребителем, но и базовой (базовыми) станциями с известными координатами. Базовая станция вычисляет величину поправки измеренных координат относительно истинных заранее известных. Далее, основываясь на гипотезе что постоянная составляющая погрешности потребителя и базовой станции приблизительно равны, эта поправка отправляется потребителю и учитывается при расчетах координат потребителя.
Источники [1, 8] позволяют провести следующую классификацию современных дифференциальных систем спутниковой навигации.
1. Системы дифференциальной навигации по кодовым и псевдофазовым измерениям. Системы дифференциальной навигации по кодовым измерениям строятся на основе измерения и обработки псевдодальностей, в общем случае, имеют неограниченную область действия и характеризуются ошибками местоопределения от долей метра до нескольких метров. Системы дифференциальной навигации по псевдофазовым измерениям характеризуются очень высокой точностью местоопределения (до долей сантиметра). Однако область их действия ограничена дальностью ~10–12 км в одночастотном режиме и ~100 км в двухчастотном режиме. Специфической особенностью дифференциальных систем по псевдофазовым измерениям является неоднозначность этих измерений, затрудняющая их использование. Системы дифференциальной навигации по псевдофазовым измерениям иногда называют системами относительных определений [8].
2. Системы дифференциальной навигации по кодовым измерениям, в свою очередь, разделяют на локальные (Local Area Differential GPS), широкодиапазонные (Wide Area Differential GPS, WADGPS) и глобальные (Global Differential GPS, GDGPS). Дальнейшая уточняющая классификация систем дифференциальной навигации будет проводиться только для систем на основе кодовых измерений.
3. Большинство современных систем дифференциальной навигации являются локальными. Они используют только одну наземную станцию измерений и формирования дифференциальных поправок (далее будем называть её дифстанцией). Дифстанция располагается в центре локальной зоны, размер которой согласно [8] может доходить до 200 км. В центре зоны обеспечивается точность местоопределения порядка 0,5–1 м. На периферии зоны точность ухудшается и постепенно приближается к точности абсолютных местоопределений. Дифференциальные поправки в локальных системах дифференциальной навигации могут формироваться на основе метода коррекции координат (the position–domain approach) и метода коррекции навигационных параметров (the measurement–domain approach). На практике большее распространение получил второй метод, в котором дифстанция формирует поправки к измерениям псевдодальностей для каждого из видимых ею спутников. Потребитель поправляет свои измерения псевдодальностей по тем же спутникам на значения, полученные от дифстанции. Для передачи поправок, сформированных в соответствии с методом коррекции навигационного параметра, был разработан специальный стандарт RTCM SC-104, учитывающий в настоящее время особенности навигационных систем GPS.
4. В широкодиапазонных системах дифференциальной навигации (WADGPS) используется сеть станций сбора информации (ССИ) и принципиально иной метод формирования дифференциальных поправок. Этот метод получил название the state-space approach (дословно - метод коррекции параметров пространства состояния или, более содержательно, метод коррекции параметров моделей движения КА, параметров модели ионосферных задержек и смещений шкал времени навигационных спутников). В широкодиапазонных системах измерения двухчастотных навигационных приёмников, расположенных на станциях сбора информации (ССИ), собираются в единый центр, где осуществляется их совместная обработка с целью оперативного уточнения параметров моделей движения КА, смещения шкал времени спутников и составления карт вертикальных ионосферных задержек. Все перечисленные данные затем оперативно передаются тем или иным способом потребителю, который использует их для уточнения данных, извлекаемых им из сигналов навигационных спутников. Согласно [8], широкодиапазонные системы дифференциальной навигации обеспечивают точность местоопределения со среднеквадратической ошибкой ~0,5 м в области, охватываемой сетью ССИ, и смежных с ней областях. В [8] указывается на сильную корреляцию между ошибками оценки смещений шкал времени и ошибками оценки вертикальных координат приёмника. Такая корреляция возникает вследствие идентичности соответствующих частных производных, особенно для спутников с большими углами места. Стабилизация опорных частот приёмников станций сбора информации и приёмника потребителя с помощью рубидиевых генераторов позволяет лучше разделять ошибки оценки смещения шкал времени и вертикальных координат приёмника. Результаты соответствующих экспериментов демонстрируют среднеквадратические ошибки вертикальных координат меньше 0,4 м.
Дополнительным, очень важным свойством широкодиапазонных систем является возможность резкого повышения целостности, по сравнению с целостностью, свойственной базовыми спутниковыми системами.
В настоящее время в мире известны только две широкодиапазонных системы дифференциальной навигации. Первая система WADGPS принадлежит фирме Satloc. Вторая система WAAS (Wide Area Augmentation System) прина длежит правительству США. Обе системы развёрнуты и эксплуатируются на территории США. В системе WADGPS фирмы Satloc потребителю сообщается карта вертикальных ионосферных задержек с шагом 2°. В системе WAAS, в зависимости от класса точности, потребитель может использовать карты вертикальных ионосферных задержек разной точности. Наиболее подробные карты содержат до 929 точек прокола ионосферы (IPP - ionosphere pierce points) [8].
Согласно [8], функционирование широкодиапазонных систем дифференциальной навигации основано на использовании трёх основных видов программного обеспечения. Первый вид — программное обеспечение уточнения параметров орбит и смещения шкал времени спутников. Второй вид — вычисление подробных карт вертикальных ионосферных задержек. Третий вид — программное обеспечение, организующее непрерывное функционирование наземной сети дифференциальной системы в реальном масштабе времени.
5. По своей структуре глобальные системы дифференциальной навигации (GDGPS) очень схожи с широкодиапазонными системами (WADGPS). Они так же используют наземную сеть станций сбора информации и тот же метод формирования дифференциальных поправок (the state-space approach). Основное отличие заключается в том, что исключение ионо-сферных ошибок в глобальных системах дифференциальной навигации осуществляется путём использования двухчастотных измерений [8].
В настоящее время можно указать на существование пока что единственной в мире глобальной системы дифференциальной навигации, использующей в качестве основы станции глобальной GPS сети (GGN) NASA. Для передачи измерений в центр обработки используется глобальная сеть Internet.
Предполагается, что за счет соответствующего исключения влияния движения спутника и обработки измеренных данных, информация может быть, в принципе, оптимально отфильтрована с тем, чтобы обеспечить прогнозирование ошибок по дальности и по скорости изменения дальности для следующей передачи сообщений. Ошибка по дальности и по скорости изменения дальности для каждого спутника может быть величиной, которая обеспечивает наилучшие среднеквадратические ошибки для периода следующего сообщения. Причиной такого предположения является тот факт, что наземная станция, будучи стационарной и выполняющей обработку информации о фазе несущей, может выполнять прогнозирующую фильтрацию сигналов спутников и может обеспечивать лучшие оценки поправок, чем может генерировать приемник пользователя.
Однако это является выгодным только для тех приложений, где пользователи применяют коррекцию в заранее определенных и равных интервалах по отношению к метке времени поправок. Для общего целевого использования рекомендуется, чтобы каждая поправка псевдодальности или изменения скорости псевдодальности была наилучшей оценкой для момента идентифицированного меткой времени.
Метка времени, отнесенная к DGNSS поправкам, представляется счетчиком времени, размещенным в заголовке сообщения. Взаимосвязь этой метки времени ( ) с реальным временем ( ) с реальным временем ( ) имеет значительное влияние на способ, которым пользователь может использовать поправки. Здесь представлены три метода работы опорной станции, чтобы дать некоторое понимание о работе DGNSS в дифференциальном режиме. ) имеет значительное влияние на способ, которым пользователь может использовать поправки. Здесь представлены три метода работы опорной станции, чтобы дать некоторое понимание о работе DGNSS в дифференциальном режиме.
По прошедшему
: Счетчик времени может представлять некоторую величину в прошлом, которая имеет достаточно измеренной информации до и после счета времени (), чтобы сделать очень точную оценку PRC и RRC в момент счета времени (). Передаваемые поправки, полученные на основе такой техники, подразумевают пост-обработку определенного типа со стороны пользователя. Пользователь может выполнять обработку близко к реальному времени, выполняя свое решение в интервале  . Измерения псевдодальности сохраняются пока не получена поправка для этого момента. После этого пользователь будет применять поправки без какой-либо задержки корректирующих данных. Чтобы получить навигационную информацию в реальном времени, приемник пользователя должен прогнозировать данные местоположения на текущее время , используя данные о скорости, или инерциальные, или другие датчики. Эта техника также хорошо применима к методу “Текущий”. . Измерения псевдодальности сохраняются пока не получена поправка для этого момента. После этого пользователь будет применять поправки без какой-либо задержки корректирующих данных. Чтобы получить навигационную информацию в реальном времени, приемник пользователя должен прогнозировать данные местоположения на текущее время , используя данные о скорости, или инерциальные, или другие датчики. Эта техника также хорошо применима к методу “Текущий”.
Текущий
: Счет времени () для PRC и RRC должен быть в пределах 0.6 секунды от последней последовательности измерений, используемых в формировании данной поправки. В этом случае время ожидания в поправках может быть вызвано только задержками в передаче сообщений от опорной станции через некоторый промежуточный передатчик и приемник пользователя. Этот метод будет выдавать точные результаты в реальном времени. Пользователь может компенсировать задержку в линии передачи данных также, как вслучае техники “По прошедшему”, представленной выше.
Будущий
: Счет времени () может быть сдвинут в будущее, чтобы компенсировать задержку в линии передачи данных. Этот метод требует точного знания ускорения псевдодальности. Этот метод будет вносить ошибку в поправки, если ускорение псевдодальности значительно изменяется в интервале между временем измерения и прогнозируемым временем. В этом случае пользователь не способен “убрать” эту ошибку, используя поправки в момент счета времени (). В сценарии, где ускорения являются значительными и хорошо известными, данная техника может повысить точность пользователя в реальном времени.
Метод, выбранный производителем обслуживания, должен удовлетворять требованиям специального обслуживания. Многие приложения, требующие высокой точности, не требуют реального фактического времени для обновления дифференциальных данных GNSS. Способность, близкая к реальному времени (< 30 секунд), может быть удовлетворительной. Метод “Текущий” обеспечивает наилучшие характеристики реального времени без искажения поправок ошибками прогнозирования. Для пользователей реального времени поправки легко пролонгируются вперед на текущее время (t) и пользователи могут получать наилучшую точность в момент счета времени (), близкого к реальному времени.
3.3 Формат сообщений дифференциальных поправок
Чтобы обеспечить общность программного обеспечения пользователя, обеспечить строгую способность выявления ошибки и минимизировать изменения по отношению к версии 2.1 Стандарта, которая относилась только к дифференциальной GPS, формат данных для дифференциальной GNSS был скопирован с формата данных GPS, хотя он и расходится с ним в чем-то, когда возникают другие требования. Однако, размер слова GPS, формат слова, алгоритм четности и другие характеристики сохранены. Наибольшее различие заключается в том, что дифференциальный стандарт использует формат сообщения переменной длины, тогда как формат GPS имеет фиксированную длину подкадров. Сохранение характеристик объясняется следующими причинами [7]:
1) Строгий алгоритм четности требуется для выделения ошибок в данных, не допуская использования неверных поправок, которые могут оказать влияние на безопасность пользователя.
2) Алгоритм четности GPS является общеизвестным и отработанным алгоритмом, с которым пользователи знакомы и который уже закодирован в приемнике пользователя.
3) Алгоритм четности перекрывает границы слова и разрешает знаковую неоднозначность, вносимую двухфазной модуляцией передачи данных.
4) 30-ти битовые слова (когда они сопоставляются с 32-х битовыми словами) в сочетании со скоростью передачи в 50 Гц обеспечивают удобную способность синхронизации, где моменты времени границ слова представляют собой величины, кратные 0.6 секунды. Граница каждого пятого слова совпадает при умножении с 3-мя секундами. Если бы использовались 32-х битовые слова, граница слова попадала бы на целочисленное значение только один раз в 16 секунд.
3.3.1 Общий формат сообщения
Общий формат сообщения показан на рисунке 2.2 с деталями для первых двух тридцатибитовых слов каждой посылки или каждого сообщения. Длина каждой посылки N + 2 слова, где N слова, содержащие данные сообщения. N изменяется в зависимости от типа сообщения, а также от содержания типа сообщения. Размер слова и алгоритм четности идентичны тому, что используется в навигационном сообщении GPS и описано в опубликованном издании Спецификации Сигналов GPS/SPS, документе, который можно приобрести в Информационном Центре GPS Береговой Охраны США.
Первые два слова каждой посылки содержат данные, которые имеют отношение к любому типу сообщения, Данные об опорной станции, опорное время и информация, необходимая для синхронизации посылки пользователем. Их содержание обобщено в Таблице 3.1. Необходимо отметить, что индекс станции относится к идентификации дифференциальных опорных станций. Он не предназначен для идентификации станций линий передачи данных, которые различны для каждого из радиомаяков.
Таблица 3.1 – Состав первого и второго слов
| Слово |
Состав |
Чи-сло би-тов |
Коэффициент масштабирования и единицы измерения |
Диапазон |
Первое слово
|
Преамбула
Индекс кадра/тип сообщения
Индекс опорной станции
Четность
|
8
6
10
6
|
-
1
1
Смотри спецификацию на сигналы GPS/SPS**
|
-
1-64*
0-1023
Смотри спецификацию на сигналы GPS/SPS
|
Второе слово
|
Модифицированный Z-счет
Номер последовательности
Число слов с данными
Состояние станции
Четность
|
13
3
5
3
6
|
0.6 сек
1
1 слово
-
Смотри спецификацию на сигналы GPS/SPS**
|
0-3599.4с
0-7
0-31 слов
8 состояний
Смотри спе-цификацию на сигналы GPS/SPS
|
* - 64 обозначается нулями во всех разрядах.
** - Спецификация сигнала стандартного позиционного обслуживания “Глобальной Системы определения местоположения”, которую можно получить из Центра Навигации Береговой Охраны, Александрия VA, 22315 [7].
Синхронизация кадра может быть получена пользователем способом, который подобен применяемому для данных GPS, с отличиями, которые связаны с переменной длиной кадров. Начало первого кадра представляет собой 8-битовую преамбулу, которая отыскивается пользователем. Номера типов сообщений являются теми, которые представлены ниже данной пояснительной записки. Индекс опорной станции является произвольным и устанавливается владельцем опорной станции.
Для передач псевдолитов, модифицированный Z-счет представляет собой время начала следующего кадра (начало преамбулы), а также опорное время для параметров сообщения. Модифицированный Z-счет отличается от Z-счета GPS тем, что LSB (младший значащий бит) имеет коэффициент масштабирования 0.6 сек, вместо 6 сек, для отсчета кадров переменной длины. Это требуется только для сообщений псевдолитов. Кроме того, диапазон Z-счета составляет только один час с целью экономии битов. Причина, лежащая в основе этого, заключается в том, что все пользователи дифференциальной GNSS всегда будут инициализироваться через систему GNSS и им будет известно время. Необходимо отметить, что Z-счет дифференциальной GNSS опирается на время GPS или GLONASS, соответственно для сообщений GPS и GLONASS, а не UTC.
Номер последовательности в кадре синхронизации является вспомогательным средством, заменяя последовательный Z-счет, когда имеется приращение параметра. Он будет увеличиваться в каждом кадре. Длина кадра на два слова больше, чем число слов с данными (N), следующих за заголовком. Т. е. если N равно нулю, то это означает, что нет ни одного слова после заголовка и длина кадра будет равна 2.
Версия 2.2 стандарта заново определяет значение трех битов Технического Состояния Станции таким образом, чтобы это не вызывало проблем у большинства существующих пользователей. Состояние “111” должно по-прежнему показывать, что опорная станция работает неудовлетворительно, “110” должно означать, что передача не контролируется, как показано в таблице 3.2. Другие шесть состояний в таблице 3.2 представляют собой те состояния, которые применяются Береговой Охраной США для обозначения коэффициента масштабирования для поля UDRE в сообщениях с дифференциальными поправками.
Таблица 3.2. Показатель технического состояния* опорной станции
| Код |
Значения |
| 111 |
- |
Опорная станция не работает |
| 110 |
- |
Передача Опорной станции не контролируется |
| 101 |
- |
Коэффициент масштабирования UDRE = 0.1 |
| 100 |
- |
Коэффициент масштабирования UDRE = 0.2 |
| 011 |
- |
Коэффициент масштабирования UDRE = 0.3 |
| 010 |
- |
Коэффициент масштабирования UDRE = 0.5 |
| 001 |
- |
Коэффициент масштабирования UDRE = 0.75 |
| 000 |
- |
Коэффициент масштабирования UDRE = 1 |
* - Техническое состояние относится к части опорной станции, предназначенной для GPS или GLONASS, и отражается в индивидуальных сообщениях. Т. е. комбинированная GPS/GLONASS опорная станция может иметь различные показатели технического состояния для GPS и GLONASS.
Если схема из таблицы 3.2 не применяется, в опорной станции должны использоваться только состояния “000”, “110” и “111”. Мобильные приемники могут игнорировать состояния от “001” до “101”; за счет этого коэффициент масштабирования мобильных приемников всегда будет фактически равен единице.
Первое слово каждого сообщения

Второе слово каждого сообщения

Рисунок 3.2 - Заголовок из 2-х слов для всех сообщений
3.3.2 Содержание и формат всех типов сообщений
На сегодня определены 33 типа сообщений из 64 возможных: в экспериментальном формате или в окончательном постоянном формате, закрытых или зарезервированных. Все они представлены в таблице 3.3. Детальное описание содержания и форматов типов сообщений будет представлено частично, так как приемник, с которым мы работаем, передает не все типы сообщений, а только часть из них, а именно 1, 2, 3, 6, 9, 16.
Таблица 3.3 - Типы сообщений
| Номер типа сообщения |
Текущее состояние
|
Название
|
| 1. |
Постоянное |
Дифференциальные поправки GPS |
| 2. |
Постоянное |
Ошибки (приращение) Дифференциальных поправок GPS |
| 3. |
Постоянное |
Параметры опорной станции GPS |
| 4. |
Экспериментальное |
Опорный эллипсоид опорной станции |
| 5. |
Постоянное |
Техническое состояние созвездия GPS |
| 6. |
Постоянное |
Нулевой кадр GPS |
| 7. |
Постоянное |
Альманах радиомаяков GPS |
| 8. |
Экспериментальное |
Альманах псевдолитов |
| 9. |
Постоянное |
Установка частных поправок GPS |
| 10. |
Зарезервировано |
Дифференциальные поправки для P-кода |
| 11. |
Зарезервировано |
Поправка диапазоне L2 для С/А-кода |
| 12. |
Зарезервировано |
Параметры псевдолитной станции |
| 13. |
Экспериментальное |
Параметры наземной передающей станции |
| 14. |
Экспериментальное |
Время недели GPS |
| 15. |
Экспериментальное |
Сообщение об ионосферной задержке |
| Номер типа сообщения |
Текущее состояние |
Название |
| 16. |
Постоянное |
Специальное сообщение GPS |
| 17. |
Экспериментальное |
Эфемериды GPS |
| 18. |
Постоянное |
Нескорректированные на RTK фазы несущей |
| 19. |
Постоянное |
Нескорректированные на RTK псевдодальности |
| 20. |
Экспериментальное |
Поправки фазы несущей на RTK |
| 21. |
Экспериментальное |
Высокоточные поправки псевдодальности |
| 22. |
Экспериментальное |
Расширенные параметры опорной станции |
| 23-30. |
- |
Не определены |
| 31. |
Экспериментальное |
Дифференциальные поправки GLONASS |
| 32. |
Экспериментальное |
Параметры опорной станции GLONASS |
| 33. |
Экспериментальное |
Техническое состояние созвездия GLONASS |
| 34. |
Экспериментальное |
Установка частных поправок GLONASS или Нулевой кадр GLONASS |
| 35. |
Экспериментальное |
Альманах радиомаяков GLONASS |
| 36. |
Экспериментальное |
Специальное сообщение GLONASS |
| 37. |
Экспериментальное |
Сдвиг системного времени GNSS |
| 38-58. |
- |
Не определены |
| 59. |
Постоянное |
Сообщения о собственности |
| 60-63. |
Зарезервировано |
Многоцелевое использование |
Рис. 2.3 и таблица 2.3 представляют содержание сообщения типа 1 - дифференциальные поправки. Это основное сообщение, которое обеспечивает поправку псевдодальности ( ) для любого времени измерения приемником GPS пользователя. ) для любого времени измерения приемником GPS пользователя.
 (3.1) (3.1)
где  - 16-битовая поправка псевдодальности; - 16-битовая поправка псевдодальности;
 - 3-битовая скорость изменения поправки псевдодальности (поправка скорости изменения дальности); - 3-битовая скорость изменения поправки псевдодальности (поправка скорости изменения дальности);
t - 13-битовый модифицированный Z-счет из второго слова. - 13-битовый модифицированный Z-счет из второго слова.
Все эти параметры относятся к спутнику, обозначенному 5-битовым индексом спутника, который показывает его  номер. Псевдодальность, измеренная пользователем, номер. Псевдодальность, измеренная пользователем,  , затем корректируется следующим образом: , затем корректируется следующим образом:
 (3.2) (3.2)
Отметим, что поправка добавляется к измерению. PR(t) является дифференциально скорректированным измерением псевдодальности, которое может обрабатываться навигационным фильтром оборудования пользователя. Кроме того, обеспечиваются 1-битовый коэффициент масштабирования (смотри таблицу 2.4) и 2-битовая ошибка дифференциальной дальности пользователя (UDRE).
UDRE представляет собой оценку неопределенности в поправке псевдодальности на уровне одной сигмы, которая оценивается опорной станцией и интегрирует оцененные воздействия от многопутевого распространения, по отношению сигнал-шум и другим воздействиям.
Сообщение типа 1 содержит данные для всех спутников, находящихся в поле зрения опорной станции  . Так как для представления поправки от каждого спутника необходимо 40 битов, не всегда требуется точно целое число слов. Могут появиться слова, которые надо дополнять 8-ю или 16-ю битами до полного кадра. Дополнение будет 1-м или 0-м, так что не будет вызывать путаницы с кодом синхронизации “преамбулы”. Формат сообщения типа 1 показан на рисунке 2.3. Каждое слово имеет один из пяти форматов, за исключением последнего слова в сообщении. Если не кратно 3, последнее слово может иметь 2 формата, содержащие или 8 или 16 битов дополнения. . Так как для представления поправки от каждого спутника необходимо 40 битов, не всегда требуется точно целое число слов. Могут появиться слова, которые надо дополнять 8-ю или 16-ю битами до полного кадра. Дополнение будет 1-м или 0-м, так что не будет вызывать путаницы с кодом синхронизации “преамбулы”. Формат сообщения типа 1 показан на рисунке 2.3. Каждое слово имеет один из пяти форматов, за исключением последнего слова в сообщении. Если не кратно 3, последнее слово может иметь 2 формата, содержащие или 8 или 16 битов дополнения.
Поправка псевдодальности будет отклоняться от истинной величины с “нарастанием возраста”. По этой причине она должна обновляться и передаваться так часто, насколько это возможно. Оборудование пользователя должно обновлять поправки соответственным образом.
Поправка скорости изменения дальности предназначена для компенсации по прогнозируемой скорости изменения поправки псевдодальности. Это является попыткой “продлить жизнь” для поправки псевдодальности, когда ее “возраст растет”. может быть, использована для коррекции на скорость приемника пользователя. Оборудование пользователя не должно использовать как поправку фазы несущей - это может ухудшить качество этого типа измерений. Измерения фазы несущей должны корректироваться только за счет использования сообщений типа 18 или 20.Структура сообщения типа 1
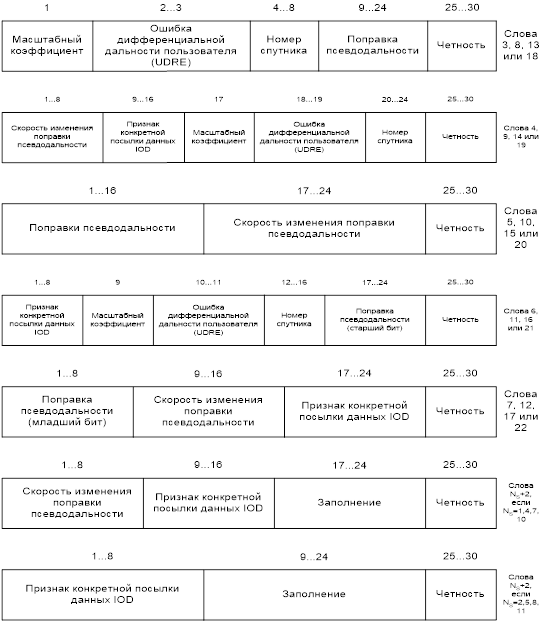
Рисунок 3.3 - Структура сообщений типа 1
Таблица 3.3. Состав сообщения типа 1
Параметр
|
Число бит |
Масштабный
коэффициент /
Единица измерения
|
Диапазон |
| Масштабный коэффициент |
1 |
(Смотри табл. 2.4) |
2 состояния |
| Ошибка дифференциальной дальности пользователя (UDRE) |
2 |
(Смотри табл. 2.5)
|
4 состояния
|
| Номер спутника (ID) |
5 |
1 |
1-32**** |
| Поправка псевдодальности (PRC(t0
)*) |
16 |
0.02 или 0.32 м |
655.34 или 10485.44 м** |
| Скорость изменения поправки псевдодальности (RRC*) |
8 |
0.002 или 0.032 м/с |
0.254 или 4.064 м/с*** |
| Признак конкретной посылки данных |
8 |
Смотри спецификацию сигналов GPS/SPS |
| Заполнение |
8x[Ns
mod3] |
Биты |
0, 8, 16 |
| Четность |
Nx6 |
Смотри срецификацию сигналов GPS/SPS |
* - дополнительный код;
** - двоичное число 1000 0000 0000 0000 указывает на наличие проблемы и оборудование пользователя должно немедленно прекратить использование данного спутника;
*** - двоичное число 1000 0000 указывает на наличие проблемы и оборудование пользователя должно не медленно прекратить использование данного спутника;
**** - номер 32 спутника индуцируется нулями во всех разрядах;
- число спутников, поправки для которых содержатся в сообщении;
 - число слов с данными в сообщении. Длина кадра равна - число слов с данными в сообщении. Длина кадра равна  слова
. слова
.
Опорная станция не будет применять модели ионосферной и тропосферной задержек при формировании дифференциальных поправок. Влияние часов спутника и релятивистских (связанных с относительным перемещением и положением) параметров будет определяться с использованием алгоритмов, описанных в Спецификации сигналов GPS/SPS. Сдвиги часов опорной станции будут общим сдвигом во всех поправках псевдодальности, которые не вызывают вредного воздействия на вычисления местоположения.
Признак конкретной посылки данных (IOD) включен в сообщение для того, чтобы оборудование пользователя могло сравнить его с IOD используемых навигационных данных GPS. IOD является признаком, который гарантирует, что вычисления оборудования пользователя и поправки опорной станции базируются на одном и том же наборе передаваемых параметров орбит и времени. Если они не согласуются, дифференциальное оборудование пользователя обязано выполнить соответствующие действия, чтобы принимать (использовать) те параметры, которые являются парой (соответствуют) для параметров, используемых опорной станцией. Это может быть выполнено двумя способами: контроль соответствия (парности) IOD спутника и IOD опорной станции в сообщениях типа 1 или 2, или прием (использование) другого сообщения с навигационными данными от соответствующего спутника. В общем случае дифференциальная станция пытается использовать текущие навигационные данные, передаваемые спутником. Если не существует никакой важной проблемы с навигационными данными, сообщения типа 1 будут использовать новые навигационные данные в пределах нескольких минут обмена.
Никогда при наличии таких обстоятельств не следует пытаться получить “частичное” дифференциальное решение, т.е. обрабатывать дифференциально скорректированные и дифференциально нескорректированные псевдодальности для расчета одного и того же местоположения. Результирующие параметры местоположения будут, как правило, не лучше, чем при недифференциальном решении.
Таблица 3.4. Коэффициент масштабирования
| Код |
Число |
Значение |
| 0 |
(0) |
Коэффициент масштабирования для поправки псевдодальности - 0.02 м, а для поправки скорости изменения дальности - 0.002 м/сек |
| 1 |
(1) |
Коэффициент масштабирования для поправки псевдодальности - 0.32 м, а для поправки скорости изменения дальности- 0.032 м/сек, (кроме того, обратитесь к таблице 2.3) |
Основная причина использования двухуровневого коэффициента масштабирования заключается в поддержании высокой степени точности в течение большего времени и в обеспечении возможности увеличить диапазон поправок в редких случаях, когда это необходимо.
Таблица 3.5. Ошибка дифференциальной дальности пользователя (UDRE)
| Код |
Число |
Дифференциальная ошибка на уровне одной сигмы |
| 00 |
(0) |
1 метра |
| 01 |
(1) |
> 1 метра и 4 метров |
| 10 |
(2) |
> 4 метра и 8 метров |
| 11 |
(3) |
> 8 метров |
Сообщения типа 2 предназначено для таких ситуаций, когда оборудование пользователя не может немедленно декодировать новые данные эфемерид спутников в спутниковых данных. Поэтому дифференциальная станция должна быть спроектирована так, чтобы немедленно декодировать новые данные эфемерид, т.к. могут быть интервалы времени, в течение которых пользователь и опорная станция используют различные данные эфемерид, что может привести в результате к ошибкам, особенно после загрузки (новыми данными) спутника. Сообщение типа 2 может быть исключено, если все приемники пользователей спроектированы для немедленного декодирования данных эфемерид.
Если применяется сообщение типа 2, опорная станция должна передавать сообщения типа 1 и типа 2 каждый раз, когда она начинает использовать новое сообщение GPS с навигационными данными для расчета местоположения спутника и компенсации сдвигов часов спутников. Это обозначается изменением параметра признак конкретной посылки данных
( ) в сообщении типа 1. Каждый новый набор спутниковых навигационных данных идентифицируется параметром . Дифференциальное оборудование пользователя не должно использовать новые спутниковые навигационные данные до тех пор, пока опорная станция не выдаст соответственный в сообщении типа 1. ) в сообщении типа 1. Каждый новый набор спутниковых навигационных данных идентифицируется параметром . Дифференциальное оборудование пользователя не должно использовать новые спутниковые навигационные данные до тех пор, пока опорная станция не выдаст соответственный в сообщении типа 1.
При изменении параметров эфемерид опорная станция должна передавать сообщение типа 2 в паре с сообщением типа 1 и продолжать передавать сообщение типа 2 в течение нескольких минут после изменения спутниковых навигационных данных. В течение этого периода дифференциальное оборудование пользователя будет воспринимать (усваивать) новые навигационные данные и начнет использовать данные “нового” сообщения типа 1. Сообщение типа 2 действует в качестве моста для продолжения высокоточной навигации в течение переходного периода. При корректном использовании сообщения типа 2 точность сохраняется. Предпочтительно, но не обязательно, передавать сообщение типа 2 первым; в будущем это может стать обязательным требованием. Если сообщение типа 2 применяется вместе с сообщением типа 9, сообщение типа 2 должно предшествовать сообщению типа 9, использующему новые эфемериды.
Данное сообщение содержит различия в поправках псевдодальности и скорости изменения дальности, вызванные изменением спутниковых навигационных данных. На опорной станции должны быть выполнены два расчета для поправки псевдодальности ( ) и поправки скорости изменения дальности ( ) и поправки скорости изменения дальности ( ). Первый расчет будет использовать самые последние навигационные данные, полученные от спутника. Второй расчет должен использовать навигационные данные, которые заменяются самыми свежими навигационными данными. Опорная станция должна вычислять разность поправок, чтобы определить ). Первый расчет будет использовать самые последние навигационные данные, полученные от спутника. Второй расчет должен использовать навигационные данные, которые заменяются самыми свежими навигационными данными. Опорная станция должна вычислять разность поправок, чтобы определить  (приращение) и (приращение) , необходимые для сообщения типа 2. (приращение) и (приращение) , необходимые для сообщения типа 2.
равна (рассчитанной с использованием более старых навигационных данных) минус (рассчитанная с использованием самых последних навигационных данных), или
 (2.3) (2.3)
Точно также
 равна (рассчитанной с использованием более старых навигационных данных) минус (рассчитанная с использованием самых последних навигационных данных), или равна (рассчитанной с использованием более старых навигационных данных) минус (рассчитанная с использованием самых последних навигационных данных), или
 (2.4) (2.4)
Чтобы использовать поправку типа 2 оборудование пользователя должно:1. Использовать в данный момент времени спутниковые навигационные данные с IOD, который составляет пару с IOD сообщения типа 2 для данного спутника;
2. Принимать сообщения типа 1 с новым IOD, который не является парой для IOD, который используется в данный момент времени;
3. Вычислять корректирующую поправку псевдодальности в соответствии с приведенным ниже уравнением, в котором используется информация сообщений типа 1 и типа 2:
 (2.5) (2.5)
где - время применения (использования коррекции);
 - модифицированный Z-счет из сообщения 1; - модифицированный Z-счет из сообщения 1;
 - модифицированный Z-счет из сообщения 2. - модифицированный Z-счет из сообщения 2.
Отметим, что это уравнение является простым расширением уравнения 2.1.
Общий формат тот же самый, что и для сообщения типа 1. В самом деле, описание 1-битового коэффициента масштабирования соответствует таблице 2.4, а описание 2-битовой ошибки дифференциальной дальности пользователя соответствует таблице 2.5. Содержание сообщения типа 2 представлено в таблице 2.6. Оно иллюстрируется рисунком 2.4.

Рисунок 2.4 - Сообщение типа 2 - ошибка (приращение)
дифференциальных поправок
Таблица 2.6. Состав сообщения типа 1
Параметр
|
Число бит |
Масштабный
коэффициент /
Единица измерения
|
Диапазон |
| Масштабный коэффициент |
1 |
(Смотри табл. 2.4) |
2 состояния |
| Ошибка дифференциальной дальности пользователя (UDRE) |
2 |
(Смотри табл. 2.5)
|
4 состояния
|
| Номер спутника (ID) |
5 |
1 |
1-32**** |
| Приращение поправки псевдодальности (PRC*) |
16 |
0.02 или 0.32 м |
655.34 или 10485.44 м** |
| Приращение скорости изменения поправки псевдодальности (RRC*) |
8 |
0.002 или 0.032 м/с |
0.254 или 4.064 м/с*** |
| Признак конкретной посылки данных |
8 |
Смотри спецификацию сигналов GPS/SPS |
| Заполнение |
8x[Ns
mod3] |
Биты |
0, 8, 16 |
| Четность |
Nx6 |
Смотри срецификацию сигналов GPS/SPS |
* - дополнительный код;
** - двоичное число 1000 0000 0000 0000 указывает на наличие проблемы и оборудование пользователя должно немедленно прекратить использование данного спутника;
*** - двоичное число 1000 0000 указывает на наличие проблемы и оборудование пользователя должно не медленно прекратить использование данного спутника;
**** - номер 32 спутника индуцируется нулями во всех разрядах;
- число спутников, поправки для которых содержатся в сообщении;
- число слов с данными в сообщении. Длина кадра равна слова.
Сообщение типа 3 содержит информацию об опорной станции. Рисунок 2.5 и таблица 2.7 представляют содержание сообщения типа 3. Оно состоит из четырех слов данных (N = 4) при полной длине кадра в шесть 30-битовых слов. Оно включает координаты антенны приемника GPS опорной станции (во Всемирной Центральной Связанной с Землей системе координат (ECEF)) с точностью до сантиметра. Рекомендуемым опорным эллипсоидом является WGS-84.
Таблица 2.7. Содержание сообщения типа 3
| Параметр |
Число бит |
Масштабный коэффициент и единица измерения |
Диапазон |
| X-координата ECEF* |
32 |
0.01 м |
21474836.47 м |
| Y-координата ECEF* |
32 |
0.01 м |
21474836.47 м |
| Z-координата ECEF* |
32 |
0.01 м |
21474836.47 м |
| Четность |
24 |
Смотри спецификацию сигналов GPS/SPS |
* - Дополнительный код
Хотя потребитель может обеспечивать выдачу этих координат в системе опорного эллипсоида, отличающегося от WGS-84, обычно это не рекомендуется, т.к. существует возможность путаницы. Если используется опорный эллипсоид, отличающийся от WGS-84, должно периодически передаваться сообщение типа 4 для информирования пользователей об опорном эллипсоиде, использованном для определения координат опорной станции. Т. к. приемник пользователя будет обрабатывать координаты относительно WGS-84 до тех пор, пока он не примет сообщение типа 4, можно ожидать появления значительных ошибок. Обычно рекомендуется, чтобы сообщение типа 4 передавалось с каждым сообщением типа 3, чтобы исключить любую неопределенность в использовании опорного эллипсоида.
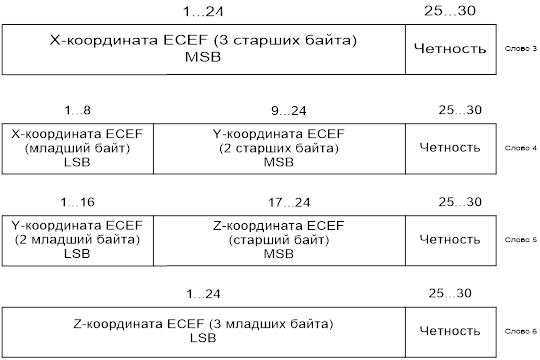
Рисунок 2.5 - Сообщение типа 3 - параметры опорной станции GPS
Сообщение типа 6 не содержит никаких параметров. Оно будет использоваться в качестве заполнителя передачи, если потребуется. Его назначение - обеспечить передачу, когда GPS опорная станция не имеет других сообщений, готовых для передачи, или, чтобы синхронизировать начало сообщения некоторой неопределенной эпохи. Может не быть никаких причин для посылки этого сообщения. Оно определяется только как сообщение на всякий случай. Оно может использоваться в будущем как сообщение-заполнитель, если будет не нужна более высокая скорость передачи сообщений вследствие медленного нарастания ошибки. Оно также может быть использовано для индексации состояния станции, т.е. “Не работает”, когда опорный приемник не работает. Хотя это короткое сообщение, оно снабжает пользователя дополнительными преамбулами. Передачи этого сообщения могли бы стать средством установления и поддерживания кадра синхронизации.
Сообщение содержит два первых слова, как обычно, в сопровождении N=0 или 1, в зависимости от того, требуется передача четного или нечетного дополнения. Если N=1, то 24 бита данных в дополнительном слове должны быть заполнены чередующимися 0 и 1. Четность должна контролироваться как обычно.
Сообщение типа 9 служит для тех же самых целей, что и сообщения типа 1, - оно содержит основные дифференциальные поправки GPS. Однако, по сравнению с типом 1 для сообщения типа 9 не требуется полный набор спутников. Как результат, сообщения типа 9 требуют использования более стабильных часов, чем в том случае, когда станция передает только сообщения типа 1, поэтому поправки спутников имеют различное опорное время.
Для предупреждения ухудшения навигационной точности из-за немоделируемого дрейфа часов, который может иметь место в промежутке между сообщениями типа 9, требуется датчик времени с высокой стабильностью. Они также полезны для медленных линий передачи данных в присутствии импульсного шума того типа, который появляется при функционировании радиомаяков. В течение периодов высокого уровня шума более высокая скорость преамбул поддерживает более высокую частоту ресинхронизации.
Сообщение типа 9 может также использоваться для улучшения характеристик линий передачи данных, которые чувствительны к интерференции от импульсного шума типа, возникающего в линиях передачи данных радиомаяков. Группирование спутников в блоки из трех значительно улучшает характеристики линии передачи данных по двум направлениям. Во-первых, когда сообщения типа 9 содержат поправки для трех спутников, изначально низкий возраст, содержащихся в них поправок, более чем компенсирует их более продолжительное время передачи, связанное с более длительными процедурами. Это показано в таблице 2.8. Во-вторых, малая длина сообщения типа 9 обеспечивает повышенную устойчивость к шуму и создает возможность более быстрой ресинхронизации вследствие того факта, что преамбула передается с более высокой скоростью (более часто). Отметим, что по сравнению со случаем использования сообщения типа 1, поправки из частного сообщения типа 9 могут использоваться сразу, как только они получены, снижая, таким образом, среднее время ожидания и уменьшая чувствительность сообщений к шуму в канале[7].
Таблица 2.8 - Возраст поправок при 100 бит/сек.
| Количество спутников |
Максимальная задержка |
| Сообщение типа 1 |
Сообщение типа 9
(3 спутника/сообщение)
|
| 4 |
5.4 с |
5.4 с |
| 6 |
7.2 с |
6.3 с |
| 8 |
9.6 с |
8.1 с |
| 9 |
10.2 с |
8.4 с |
Содержание и формат сообщения типа 9 идентично содержанию и формату сообщения типа 1 за исключением того, что (число спутников) и (число 30-битовых слов) будут значительно меньше.
Сообщение типа 16 является специальным сообщением в коде ASCII, которое может индицироваться на принтере или ЭЛТ. Каждое сообщение типа 16 может иметь длину до 90 символов. Для согласованности с другими сообщениями, младшие значащие биты передаются первыми, что означает, что “переворот данных”, также применяется в этом сообщении. 8-битовый код ASCII используется, но следует принимать во внимание, что младший значащий бит, как правило, будет всегда равняться нулю вследствие того, что не существует стандарта на обозначение других символов, отличных от 7-битовых символов ASCII. Если, например, для специальных целей коммерческие операции или агентства выбирают для использования графические символы IBM, они могут быть переданы с использованием сообщение типа 16. Заполняющие биты в таком сообщении представляются нулями во избежание случайной ошибочной интерпретации чередующихся 1 и 0, которые служат заполнителями в других сообщениях.
Рисунок 2.6 показывает слово в том виде, как оно выглядит в сообщении типа 16.
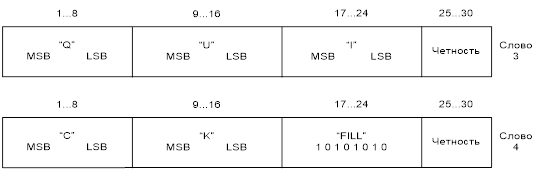
Рисунок 2.6 - Сообщение типа 16. ASCII (“QUICK”)
4.1 Составляющие ошибок
Точностные характеристики СРНС определяются уровнем погрешностей, сопутствующих навигационным определениям (погрешности определения псевдодальности ― ПД) и геометрическому расположению используемому для оценки место ИСЗ и АП.
Погрешность измерения ПД складывается из погрешностей следующих составляющих:
- эфемеридная информация;
- частотно-временная синхронизация;
- шумы приемника;
- внешние помехи;
- тропосферные задержки;
- ионосферные задержки;
- наличие переотраженных сигналов (многолучевость).
При статистической независимости этих погрешностей, что практически всегда имеет место, дисперсия погрешности оценки ПД равна сумме дисперсий перечисленных составляющих. Величины составляющих могут существенно различаться и имеют различные временные интервалы изменчивости. Последнее приводит к различному проявлению их на этапе последовательного многократного измерения ПД и места в сеансе местоопределения. По различным оценкам уровень погрешности (СКО) определения псевдодальностей по легко обнаруживаемому коду (C/
A
) находится в пределах 6,2–6,6 м и 7,7–9,6 м соответственно для околозенитных и пригоризонтных ИСЗ.
Измеренное значение ПД пересчитывается к измеренной дальности, которой соответствует поверхность положения. Пересечение трех поверхностей положения определяет местоположение АП.
Среднеквадратическая погрешность определения поверхности положения связана с погрешностью измеренного навигационного параметра σi
соотношением:
 
где ― коэффициент ошибки (погрешности).
Для дальномерного измерителя к = 1.
Среднеквадратическая погрешность определения места по минимально необходимому числу измерений с некоррелированными погрешностями рассчитывается по формуле:
 , ,
где  ; ;  , ― среднеквадратические погрешности определения поверхностей положения; , ― среднеквадратические погрешности определения поверхностей положения;  ― угол пересечения 1 и 2 поверхностей положения в месте расположения источника излучения; ― угол пересечения 1 и 2 поверхностей положения в месте расположения источника излучения;  ― среднеквадратическая погрешность определения линии пересечения 1 и 2 поверхностей положения; ― среднеквадратическая погрешность определения линии пересечения 1 и 2 поверхностей положения;  ― угол пересечения третьей поверхности положения с линией пересечения первых двух. ― угол пересечения третьей поверхности положения с линией пересечения первых двух.
Приведенные выражения показывают, что связь между погрешностью измерения псевдодальности и погрешностью места осуществляется посредством некоторого коэффициента (коэффициентов), зависящих только от взаимного расположения АП и ИСЗ, точнее, от углов пересечения поверхностей положения. Рассмотрим геометрический фактор, называемый в иностранной литературе ― коэффициент ухудшения точности (GDOP― Geometric Diluction ofPrecision). Введено несколько видов коэффициентов: PDOP(пространственный, трехмерный),
HDOP(горизонтальный, двумерный),
VDOP(по высоте). Аналогичные понятия введены для погрешностей определения скорости и времени.
Недостаточный GDOP (большое значение) соответствует случаю, когда множества используемых спутников отличаются по положению на небесной сфере незначительно или напротив расположение элементов созвездия, обеспечивающее повышенную точность местоопределения достаточному GDOP. (см. рис. 4.10).
 
Рис. 4.10. Расположение ИСЗ, обеспечивающее низкую (слева большой GDOP:5−10) и высокую (справа GDOP <4
) точность
Существует несколько видов погрешностей (ошибок), вызываемых различными причинами. Условно их разделяют на шумовые ошибки, ошибки смещения и случайные грубые ошибки. Качественное проявление видов ошибок представлено на рис. 4.12.

Шумовой разброс. Систематическое Грубая ошибка.
 – заданные координаты; – заданные координаты;
 – измеренные координаты. – измеренные координаты.
Рис. 4.11. Проявление шумовой ошибки, ошибки смещения и грубой ошибки
Шумовые ошибки обусловлены шумами приемника (примерно 1 м) и комбинациями кодовых сигналов дальности (примерно 1 м).
Источники ошибок смещения (систематической ошибки) следующие: ошибки спутниковых часов, неисправленные сегментом управления (могут приводить к ошибкам порядка одного метра); ошибки эфемероидных данных (до 1 м); тропосферные задержки (до 1 м); не моделируемые ионосферные задержки (до 10 м; используемая модель учета ионосферной задержки может устранить только приблизительно половину из возможных 70 нс задержки; остающиеся же 10 м являются следствием неопределенности этой модели); влияние отраженных радиосигналов (до 0,5 м) от близко расположенных поверхностей, которые интерферируют с сигналом, следующим по прямому направлению от спутника.
Грубые ошибки могут приводить к ошибкам в сотни километров и более. Причины их следующие. Ошибки сегмента управления из-за компьютерной или человеческой ошибки могут вызывать ошибки от одного метра до сотен километров. Ошибки пользователя, включая неправильный ввод геодезических данных, могут вызывать ошибки от 1 до сотен метров. Ошибки приемника из-за программного обеспечения или отказов аппаратных средств могут вызывать ошибки любого размера.
В целом шумовая и систематические ошибки смещения, объединяясь, приводят к типичным ошибкам расстояния около пятнадцати метров для каждого из спутников, используемых при определении координат.
При эксплуатации системы NAVSTAR предусмотрено намеренное снижение точности (SА
) временным дрейфом дальномерных кодов, изменяющимся с течением времени для того, чтобы ограничить точность для всех пользователей, кроме американской армии и нескольких правительственных агентств. Потенциальная точность С/А
-кода (30 м) таким образом уменьшалась до 100 м (два среднеквадратичных отклонения). S
A
в каждом спутниковом сигнале различна, поэтому ошибка, возникающая в результате навигационного решения – функция SA
каждого ИСЗ, используемого в решении задачи навигации. Так как SA
имеет период в несколько часов, то определение положения, или индивидуальные псевдодиапазоны SА
не могут быть устранены путем усреднения за более короткий период. В настоящее время намеренное снижение точности отключено.
C учетом всех составляющих погрешностей, на одночастотном оборудовании с использованием C/A кода гарантировано получается объявленная точность по координатам (широта, долгота) для системы GPS равную ~100 метров (максимальная ошибка).
В автономном режиме с использованием C/A кода проявляются все рассмотренные в 4.1 ошибки.
В этом режиме единственным способом улучшения точностных характеристик является временное усреднение. Этим простым способом можно устранить случайные составляющие погрешностей (в том числе медленно меняющиеся случайные составляющие погрешностей).
В автономном режиме в режиме C/A, после применения временного усреднения за сравнительно небольшой период измерений, устраняются тропосферные задержки. Ионосферную ошибку этим способом можно устранить лишь частично. То есть постоянную составляющую ионосферной ошибки устранить этим способом нельзя. Зато можно устранить изменяющуюся составляющую ионосферной ошибки, сведя таким образом ионосферную ошибку к ионосферной ошибке которая создается стандартной атмосферой. Однако, на постоянную составляющую можно внести поправку.
В автономном режиме в режиме P в существенной мере устраняется ионосферная ошибка. Поскольку в этом случае измерения производятся на двух частотах. Двухчастотный или дисперсионный способ уменьшения погрешности измерения ПД, вызываемой условиями распространения сигнала ИСЗ в ионосфере. Основой способа является тот факт, что коэффициент преломления ионосферы в некоторой точке является известной функцией частоты сигнала и пропорционален электронной концентрации. Реализуется способ путем одновременного измерения ПД двумя комплектами аппаратуры, работающими на разных частотах. Погрешности измерения в каждом комплекте различны из-за различия частот, но в одинаковой степени зависят от интегральной электронной концентрации вдоль одной и той же трассы распространения. Поскольку частотная зависимость и частоты известны, то погрешности определяются только электронной концентрацией. В результате после измерения двух ПД получается система из двух уравнений с двумя неизвестными: истинная псевдодальность и интегральная электронная концентрация.
В автономном режиме в режиме P, устраняется существенная часть ионосферных задержек.
В основе метода дифференциальной навигации, как написано выше в разделе 3, лежит относительное постоянство значительной части погрешности измерения навигационной величины или погрешности расчета координат во времени и в пространстве.
Краткий обзор стабильности характеристик составляющих погрешности дает следующее. Ошибки за счет синхронизации шкал времени на ИСЗ практически постоянны в пространстве. Для погрешности определения координат ИСЗ 20 м изменчивость ошибок псевдодальностей составляет сантиметры при разности расстояний между АП порядка 100 км и дециметры при взаимных удалениях порядка 1000 км. Изменчивость во времени и пространстве стабильных составляющих ионосферных погрешностей, обусловленных запаздыванием сигнала при прохождении в ионосфере, характеризуется корреляционной функцией, которая имеет временные и пространственные радиусы корреляции на уровне соответственно нескольких часов и тысяч километров. Поэтому на интервале в несколько единиц минут и сотен километров ионосферные погрешности в условиях спокойной ионосферы можно полагать достаточно стабильными. Их уровень составляет от 10 до 40 м и достигает минимума при максимальном угле места визируемого ИСЗ, а их изменчивость через 1 мин составляет 0,1–0,2 м (СКО), а через 6 мин — 0,3–1,4 м.
Точность местоопределения после ввода дифференциальных поправок определяется остаточными погрешностями, обусловленными изменчивостью квазисистематических ошибок синхронизации, эфемеридного обеспечения и ошибок за счет ионосферы, а также ошибками, обусловленными шумами и помехами, многолучевостью за счет приема отраженных окружающими объектами сигналов и воздействием тропосферы. Остаточная погрешность местоопределения составляет единицы метров на больших расстояниях разноса и менее одного метра на малых.
В отличие от автономного метода, дифференциальный метод позволяет устранить постоянные составляющие ошибок. Также целый ряд относительно медленно меняющихся случайных составляющих ошибок.
Ошибки часов спутника и эфимеридная ошибка полностью компенсируются дифференциальным режимом, пока приемник пользователя и опорная станция используют данные одних и тех же спутников. Эфемеридные ошибки, если они достаточно велики (30 м и больше) точно так же компенсируются дифференциальным режимом. Для пользователей, находящихся вблизи опорной станции, пути соответствующих сигналов от спутников достаточно близки, так что компенсация является почти полной. Когда удаление пользователь - опорная станция возрастает и различные пути прохождения сигналов от спутников через ионосферу и тропосферу будут отличаться достаточно сильно, атмосферные неоднородности могут вызывать до некоторой степени различные задержки. Так как их протяженность различна, они вызывают ошибку в дифференциальных измерениях GPS, называемую пространственной декорреляцией. Эта ошибка становится больше при увеличении расстояния пользователь-станция, т.е. при нескольких сотнях километров.
Таким образом, в дифференциальном режиме остаются шумовые погрешности, погрешности из-за внешних источников шума, погрешности из-за переотражений, частично ионосферная ошибка и тропосферная ошибка. Эти погрешности, за исключением ионосферной составляющей, будут примерно равными как для P кода, так и для C/A кода.
В автономном режиме с использованием C/A кода остаются ионосферные задержки, тропосферные задержки, эфимеридная ошибка, ошибки частотно-временной синхронизации, ошибки от внутренних и внешних шумов и ошибки из-за многолучевости.
При оценочных расчетах, ошибка в таком режиме составляет 70-100 метров. Метод временного усреднения позволяет исключить тропосферные ошибки что приводит к существенному улучшению точности до единиц метров.
В автономном режиме с использованием P кода устраняются ошибки: эфимеридная, частотно-временная и ионосферная. Таким образом, оценочная точность повышается до 20-30 сантиметров.
В дифференциальном режиме устраняются ионосферные задержки, ошибки часов спутника, эфимеридная ошибка. Таким образом, оценочная точность при использовании фазовой коррекции в этом методе становится равна 20-30 сантиметров. При этом, при использовании временного усреднения, можно исключить непостоянную составляющую ионосферной ошибки и тропосферную ошибку, что приводит к снижению уровня ошибки до 10-15 сантиметров.
Оценка точности производилась в три этапа.
Первый этап проводился с целью выяснения эффективности временного усреднения. Для этого использовался комплект аппаратуры Z12 (SCA-12) состоящий из одного приемника.
Второй этап проводился с целью выяснения использования дифференциального режима и дифференциального режима с фазовым уточнением. Для этого использовался комплект аппаратуры Z12 (sca-12) состоящий из двух приемников.
Третий этап проводился с целью выяснения влияния затенения и переотражения навигационных сигналов городской застройкой. Для этого использовался комплект аппаратуры Z12 (SCA-12) состоящий из двух приемников.
5.2 Аппаратура
Работа дифференциального режима АП оценивалась с помощью комплекта аппаратуры, состоящей из двух приемников сигналов СРНС «Навстар» Z12. Первый приемник выступал в роли базовой (корректирующей) станции, формирующей дифференциальные поправки. Вторым приемником производились измерения координат с учетом дифференциальных поправок, передаваемых по радиоканалу с базовой станции.
Приемник Z12 имел следующие технические характеристики.
1. Приемник Z12 фирмы Ashtech (сертифицирован и разрешен к применению в РФ) является 36 канальным Р-кодовым приемником (12 параллельных каналов по С/А-коду, частота L1; 12 параллельных каналов по Р-коду, частота L1; 12 параллельных каналов по Р-коду, частота L2) сигналов системы GPS "Навстар" с двухбитным аналого-цифровым преобразованием сигнала.
2. В приемнике используется специальная Z-технология для подавления зашумления Р-кода (Anti-Spoofing - A/S).
3. Точность измерения линий в режиме СТАТИКА, БЫСТРАЯ СТАТИКА, КИНЕМАТИКА, ПСЕВДОКИНЕМАТИКА составляет 5мм+1мм/км.
4. Определение координат выполняется в реальном времени, без последующей обработки, с точностью не хуже 3 cм.
5. Время измерений составляет 0,5 секунды на одно независимое измерение.
6. Дальность в дифференциальном режиме достигает значений 50 км в зависимости от используемого радиооборудования.
7. Время старта составляет не более 2 минут (от включения до начала съемки) и не более 30 секунд с текущими эфемеридами.
8. Сбор данных осуществляется во внутреннюю память приемника.
9. Программное обеспечение приемника обеспечивает сверхбыстрые определения координат.
Радиоканал для передачи дифференциальных поправок был организован на радиомодемах RF96 c мощностью излучения 20 Вт на частоте 412 МГц.
Погрешности измерений подразделяют на грубые погрешности и промахи, систематические и случайные погрешности. Грубые погрешности и промахи появляются или в результате просчета наблюдателя при проведении опыта, или при проведении расчета, или в связи с резким изменением условий эксперимента и т. п. Исключение грубых погрешностей и промахов осуществляется путем повторения опыта и расчета. Поэтому можно полагать, что при многократных повторениях эксперимента эти погрешности исключаются.
Систематическими погрешностями называются погрешности, которые остаются неизменными или изменяющимися закономерным образом при повторении измерения значения величины.
Систематические погрешности чаще всего связаны с методикой измерений или обусловлены инструментальной погрешностью средств измерений. В первом случае обнаружить систематическую погрешность можно, применив различные методики измерений. Во втором – поставив ряд опытов в одной и той же точке с заранее известным эталоном. В результате измерений эталона можно найти поправку к показаниям прибора и устранить тем самым инструментальную погрешность. Таким образом все систематические погрешности вполне устранимы.
Случайными называются погрешности, изменяющиеся случайным образом при повторении эксперимента. Случайные погрешности, вообще говоря, неустранимы. Однако многократным повторением измерений значение измеряемой величины может быть получено сколь угодно близким к ее точному значению.
При постановке эксперимента необходимо принять во внимание случайный характер результатов измерения. В связи с этим возникает вопрос о числе измерений, достаточном для получения надежных данных о свойствах объекта. Если результатом должны быть числовые характеристики изучаемого объекта или процесса, то число измерений может быть достаточно малым, порядка нескольких десятков. Если результатом должны быть сведения о статистических свойствах объекта исследования, то число измерений имеет порядок величины  или даже большее. Для того чтобы выявить статистические характеристики необходимо разбить весь диапазон изменения наблюдаемой величины х
на интервалы или даже большее. Для того чтобы выявить статистические характеристики необходимо разбить весь диапазон изменения наблюдаемой величины х
на интервалы  , которые также называются разрядами. Оптимальное число разрядов к
зависит от числа измерений n
и ориентировочно его можно определить по формуле: , которые также называются разрядами. Оптимальное число разрядов к
зависит от числа измерений n
и ориентировочно его можно определить по формуле:
 (3.1) (3.1)
Положение разрядов выбирают так, чтобы среднее из наблюдаемых значений величины лежало близко к середине соответствующего разряда.
Очевидно, все измеренные значения  можно распределить по разрядам. Каждый из разрядов будет характеризоваться значением можно распределить по разрядам. Каждый из разрядов будет характеризоваться значением  , принятым для данного разряда. В результате можно построить таблицу распределения , принятым для данного разряда. В результате можно построить таблицу распределения
В первом столбце таблицы записаны значения , принятые для данного разряда, а во втором – число измерений  (частота попадания величины х
в область j
– разряда). Графически таблицу распределения можно представить в виде гистограммы. (частота попадания величины х
в область j
– разряда). Графически таблицу распределения можно представить в виде гистограммы.
В течение длительного промежутка времени (недели) с помощью приемника AshtechSCA – 12 проводились измерения координат антенны.
Принимаемый сигнал от спутников поступал от антенны на приемник где производилась его частичная обработка. Далее через драйвер последовательного порта RS-232 информация от приемника поступала на ЭВМ со скоростью одно сообщение в секунду, где с помощью программы Eval 32 проводилась автоматическая запись всей информации в текстовый файл, а так же обработка полученных данных. Поступающие данные содержали информацию:
· О количестве «видимых» КА;
· Номере каждого «видимого» КА;
· Угол места и азимут КА относительно антенны;
· Отношение сигнал – шум;
· А так же используется ли КА в измерении координат;
· Координаты антенны приемника.
Так же если ввести координаты антенны в программу, то можно наглядно увидеть отклонение определения координат от заданных и не только посмотреть, но и оценить их количественно.
При дальнейшей обработке записанных данных из текстового файла данные заносились MSExcel где и производилась их окончательная обработка.
Так как информация от приемника к ЭВм поступает со скоростью одно сообщение в секунду, то было принято решение делать три вида выборки отсчетов из всей совокупности, то есть отсчеты с секундной выборкой, 5-ти минутной и часовой.
5.3.3 Результаты измерений
В результате обработки были найдены средние значения широты, долготы и высоты, оценены средние квадратичные отклонения (СКО), которые приведены в таблице 3.1. Так же построены гистограммы измеренных значений для двух случаев, приведенные на рисунке 3.1 – 3.2
Таблица 3.1 – Результаты эксперимента.
| 1 сек |
1 час |
| Среднее значение широты |
56˚27’6.50’’ |
56˚27’6.52’’ |
| Среднее значение долготы |
84 57’43.18’’ 57’43.18’’ |
8457’43.19’’ |
| Среднее значение высоты (м) |
131,83 |
131,85 |
| СКО широты (м) |
2.31 |
1.46 |
| СКО долготы (м) |
1.75 |
1.61 |
| СКО высоты (м) |
2.15 |
2.17 |

Рисунок 3.1 – Гистограммы посекундной выборки.

Рисунок 3.2 – Гистограммы часовой выборки.
Огибающие гистограмм на рисунке 3.1, 3.2 отличаются от нормального закона. Возможно, это связано с тем, что на данном интервале времени измеренные значения носят не случайный характер, а состоят из случайной и систематической составляющей. Если взять измерения на более большом интервале времени (например, месяц), то систематическая составляющая тоже будет носить случайный характер, и форма кривой будет в большей степени соответствовать нормальному закону распределения.
5.4 Измерения в дифференциальном режиме
5.4.1 Методика измерений
В течение фиксированых отрезков времени с помощью двух приемников AshtechSCA – 12 проводились измерения координат АП.
Принимаемый сигнал от спутников поступал от антенн на приемники где производилась его частичная обработка.
Далее через последовательные порты и драйверы RS-232 информация от приемника поступала на ЭВМ сразличной скоростью сообщений в секунду, где с помощью программы PRISM проводилась автоматическая запись всей информации, а так же обработка полученных данных.
Эксперимент проводился 03.12.2007 (09:09:25.00 .. 11:08:35.00) с использованием двух приемников Ashtech SCA-12S через каждые 5 секунд (всего за эксперимент было произведено 1430 измерительных эпох. Антенна АП была выставлена в юго-восточное окно лаборатории.
СКО в автономном режиме
Широта (м): 3.941485
Долгота (м): 3.170840
Высота (м): 3.146738
СКО в дифференциальном режиме
Широта (м): 0.257843
Долгота (м): 0.727183
Высота (м): 0.203372
СКО в дифференцильном режиме с использованием фазового уточнения Широта (м): 0.159712
Долгота (м): 0.524596
Высота (м): 0.171184
5.4.3 Второй эксперимент
Эксперимент проводился 03.12.2007 (06:26:20.00 .. 08:25:20.00) с испльзованием двух приемников Ashtech SCA-12S через каждые 20 секунд (всего за эксперимент было произведено 357 измерительных эпох. Антенна АП была выставлена в юго-восточное окно лаборатории.
СКО в автономном режиме
Широта (м): 1.101042
Долгота (м): 1.256856
Высота (м): 1.383968
СКО в дифференциальном режиме
Широта (м): 0.198202
Долгота (м): 0.371975
Высота (м): 0.084000
Ско в дифференцильном режиме с использованием фазового уточнения
Широта (м): 0.128189
Долгота (м): 0.315991
Высота (м): 0.103652
Эксперимент проводился 04.12.2007 (08:29:44.00..10:29:42.00)
измерения производились с испльзованием двух приемников Ashtech SCA-12S через каждую 1 секунду (всего за эксперимент было произведено 7198 измерительных эпох. Антенна АП была выставлена в северное окно лаборатории.
СКО в автономном режиме
Широта (м): 3.305110
Долгота (м): 3.144579
Высота (м): 2.473976
СКО в дифференциальном режиме
Широта (м): 0.278446
Долгота (м): 0.706456
Высота (м): 0.242687
Ско в дифференцильном режиме с использованием фазового уточнения
Широта (м): 0.138257
Долгота (м): 0.403907
Высота (м): 0.165313
Эксперимент проводился 04.12.2007 (06:02:35.00..08:02:30.00) измерения производились с использованием двух приемников Ashtech SCA-12S через каждые 5 секунд (всего за эксперимент было произведено 1439 измерительных эпох. Антенна АП была выставлена в северное окно лаборатории.
СКО в автономном режиме
Широта (м): 2.721036
Долгота (м): 2.875924
Высота (м): 2.966014
СКО в дифференциальном режиме
Широта (м): 0.183720
Долгота (м): 0.465383
Высота (м): 0.143673
Ско в дифференциальном режиме с использованием фазового уточнения
Широта (м): 0.143506
Долгота (м): 0.377042
Высота (м): 0.119360
Второй эксперимент наглядно показал, что использование фазового уточнения помогает значительно улучшить точность измерения даже при условии слабой видимости спутников (5-7). Это легко увидеть из всех экспериментов этого цикла. Фазовое уточнение улучшает точности и при длительных измерениях и при более кратковременных. Это связано в первую очередь с тем, что дифференциальная поправка формируемая на базовой станции вычисляется более точно. На основании эксперимента, необходимо сделать вывод что фазовое уточнение это хороший способ улучшения точносных характеристик, способный увеличить точность с десятков сантиметров до единиц сантиметров.
5.5.1 Описание приемных позиций базовой и подвижной станций
Схема расположения позиций приведена на рисунке 8.1, на котором изображен фрагмент карты, соответствующий южной части г. Томска. Позиции расположения подвижных станций обозначены цифрами 1, 2, 3 и 4. Эта часть города характеризуется малоэтажной городской застройкой (2-5 этажей). Имеются также кустарники и деревья высотой не более 10-15 м.
Антенна базовой станции (АБС) располагалась на крыше ориентированного с севера на юг двухэтажного здания НИИ РТС и не имела каких либо препятствий для приема сигналов СРНС. Ее высота составила 116 м над уровнем моря. На крыше этого же здания размещалась антенна радиомодема.
Измерения координат проводились на всех четырех позициях подвижной станции при изменении положения антенны АП (приемника Z12) по высоте. Позиции, на которых производились измерения, выбирались исходя из возможности использования различной городской застройки для создания отражений при приеме сигналов СРНС, а также их затенения.
Антенна АП располагалась на телескопической мачте, размещенной на КУНГе автомобиля ГАЗ-66 и могла перемещаться по высоте.
На позиции 1 (рисунок 5.5.2) антенна АП находилась на расстоянии 20 м от двух-этажного здания в восточном направлении.
На позиции 2 (рисунок 5.5.3) антенна АП располагалась вблизи двухэтажного здания на расстоянии 3,5 м от стены и 37 м от пятиэтажного здания в южном направлении.
Антенна АП на третьей позиции находилась в юго-западном направлении на расстоянии 12 м от угла двухэтажного здания .
Четвертая позиция была открытой и располагалась на высоком берегу реки Томь.
5.5.2 Методика измерений
Измерения координат на каждой позиции проводились при различной высоте антенны АП, которая изменялась ступенчато с помощью телескопической мачты. На каждой высоте в память приемника записывался десятиминутный сеанс данных. На первой и второй позициях измерения проводились дважды в различное время суток. Записанные сеансы содержали в себе взятые через пять секунд отсчеты радионавигационных параметров принимаемых сигналов СРНС, по которым в процессе обработки рассчитывались средние координаты и среднеквадратические отклонения от средних.
5.5.3 Результаты оценки влияния отражений вблизи АП а точность дифференциальной системы
Зависимость ошибки определения местоположения выносной антенны АП приемника Z12 СРНС «Навстар» от высоты над уровнем моря для двух серий измерений на позиции 1, проведенных в разное время суток, показана на рисунке 5.5.5
Аналогичные зависимости приведены на рисунках 5.5.6 – 5.5.8 для позиции 2, позиции 3 и позиции 4, соответственно.
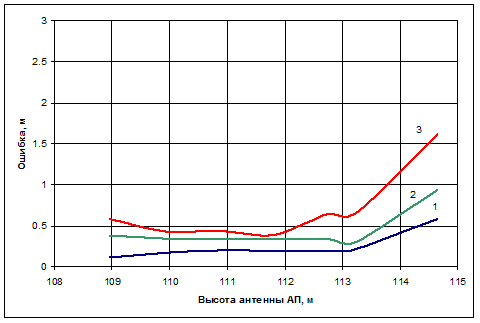
а)
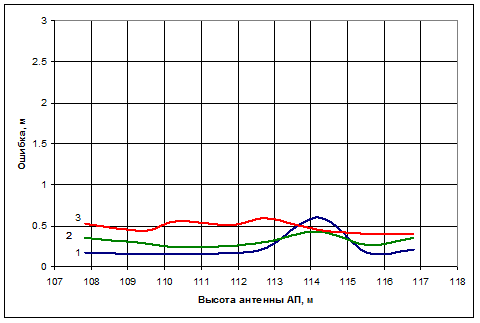
б)
Рисунок 5.5.5 – Зависимость ошибки определения местоположения выносной антенны приемника Z12 СРНС «Навстар» от высоты над уровнем моря (1 – ошибка по координате X, 2 – ошибка по координате Y, 3 – ошибка по координате Z) на позиции 1
а) 16.07.07, б) 23.07.07
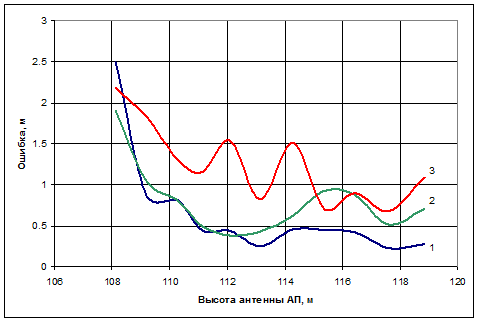
а)
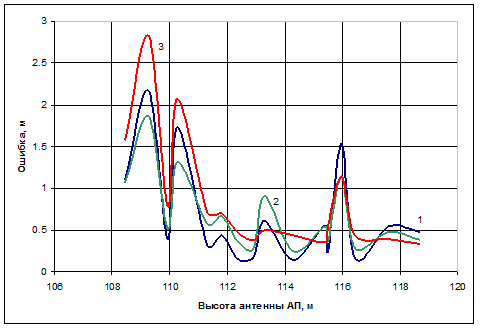
б)
Рисунок 5.5.6 – Зависимость ошибки определения местоположения выносной антенны приемника Z12 СРНС «Навстар» от высоты над уровнем моря (1 – ошибка по координате X, 2 – ошибка по координате Y, 3 – ошибка по координате Z) на позиции 2
а) 18.07.07, б) 20.07.07
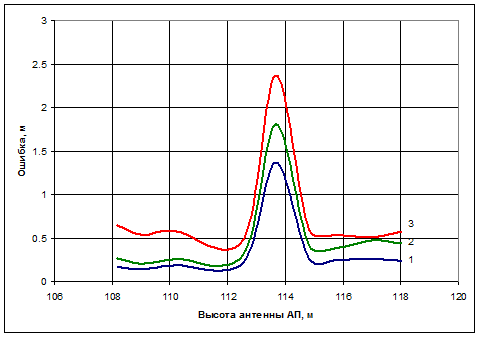
Рисунок 5.5.7 – Зависимость ошибки определения местоположения выносной антенны приемника Z12 СРНС «Навстар» от высоты над уровнем моря (1 – ошибка по координате X, 2 – ошибка по координате Y, 3 – ошибка по координате Z) на позиции 3
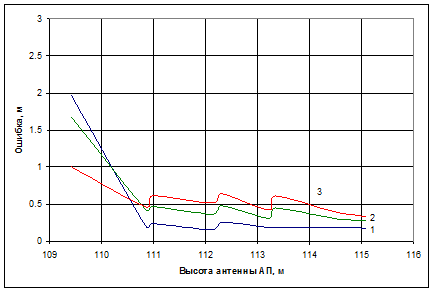
Рисунок 5.5.8 – Зависимость ошибки определения местоположения выносной антенны приемника Z12 СРНС «Навстар» от высоты над уровнем моря (1 – ошибка по координате X, 2 – ошибка по координате Y, 3 – ошибка по координате Z) на позиции 4
Полученные результаты позволяют сделать следующие выводы.
1. Величина ошибки при местоопределении положения подвижной станции в малоэтажной застройке из-за влияния местных предметов составляет 1,5-2,5 м.
2. Величина ошибки местоопределения непостоянна и зависит от высоты антенны по отношению к застройке и другим местным предметам, а также от конкретной реализации группировки навигационных КА.
3. Детальный анализ ошибок местоположения необходим в случае требования по точности менее 2,5 м.
4. Если допустимая ошибка составляет порядка 2,5 м, основные проблемы использования спутниковых радионавигационных систем будут связаны с прерыванием приема сигналов навигационных КА из-за зданий большей этажности, чем использованная при проверке.
5.6.1 Описание приемных позиций базовой и подвижной станций
Оценка погрешностей при использовании дифференциального режима измерения координат выполнялась также на одночастотной АП системы GPS типа AshtechSCA-12/12S. Измерения проводились в 433 аудитории учебного радиотехнического корпуса ТУСУР. Антенна АП располагалась вблизи стены здания, на крыше которого была установлена антенна опорной станции в точке с координатами: широта=56º 27.10862’; долгота=084º 57.71968’.
Измерения выполнялись в двух точках (положения №1 и №2, рисунок 5.5.9), расположенными на четвертом этаже четырехэтажного здания, ниже крыши на 2 м. Первая точка расположения антенны приемника СРНС была удалена от стены здания на 0,34 м, вторая – на 1,97 м.

Рисунок 5.5.9 – Взаимное расположение антенн базовой и выносной станций
5.6.2 Методика измерений
Измерения проводились сеансами по 30 минут (1800 отсчетов). При проведении измерений количество спутников в рабочем созвездии выносной станции изменялось от 3 до 6. Основные результаты измерений представлены на рисунках 5.5.10-5.5.13 (положение №1) и рисунках 5.5.14-5.5.17 (положение № 2) в виде гистограмм значений широты и долготы, приведенных к относительным линейным единицам. На гистограммах представлены числовые характеристики: средние и среднеквадратические значения.
5.6.3 Результат измерений
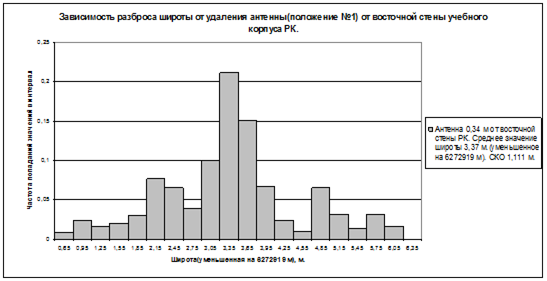
Рисунок 5.5.10 – Гистограмма широты антенны выносной станции, расположенной на удалении 0,34 м от стены здания
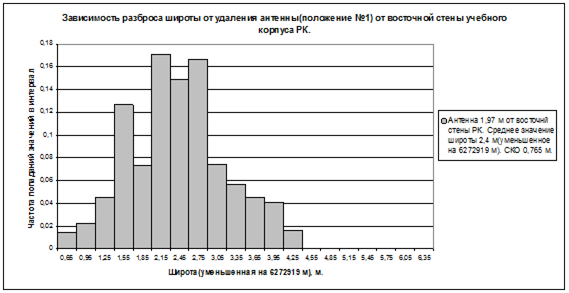
Рисунок 5.5.11 – Гистограмма широты антенны выносной станции, расположенной на удалении 1,97 м от стены здания (положение №1)
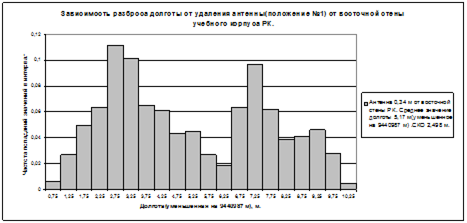
Рисунок 5.5.12 – Гистограмма долготы антенны выносной станции, расположенной на удалении 0,34 м от стены здания (положение №1)
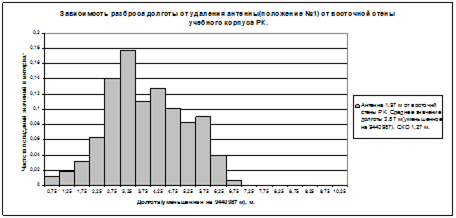
Рисунок 5.5.13 – Гистограмма долготы антенны выносной станции, расположенной на удалении 1,97 м от стены здания (положение №1)
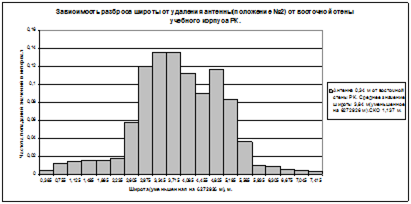
Рисунок 5.5.14 – Гистограмма широты антенны выносной станции, расположенной на удалении 0,34 м от стены здания (положение №2)
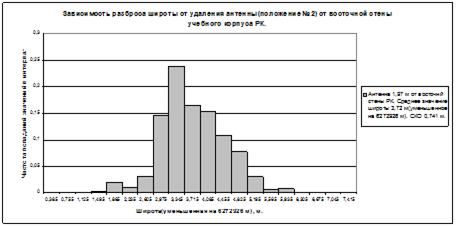
Рисунок 5.5.15 – Гистограмма широты антенны выносной станции, расположенной на удалении 1,97 м от стены здания (положение №2)
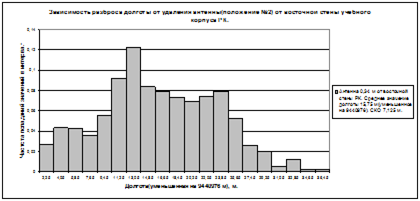
Рисунок 5.5.16 – Гистограмма долготы антенны выносной станции, расположенной на удалении 0,34 м от стены здания (положение №2)
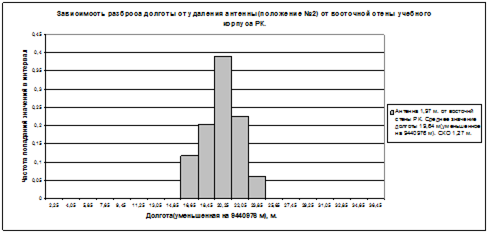
Рисунок 5.5.17 – Гистограмма долгот антенны выносной станции, расположенной на удалении 1,97 м от стены здания (положение №2)
По полученным данным были рассчитаны расстояния между антеннами выносных станций в положении №1 и №2, базовой и выносной антенной в положении №1, базовой и выносной антенной в положении №2 и получены следующие значения (в скобках указаны геометрические расстояния).
На удалении 0,34 м от стены:
- между антеннами выносных станций в положении №1 и №2: 8,02м (7,93м),
- между антеннами базовой станцией и выносной в положении №1: 9,12м (9,85м),
- между антеннами базовой станцией и выносной в положении №2: 9,47 м (11,25 м).
На удалении 1,97 м от стены:
- между антеннами выносных станций в положении №1 и №2: 8,43 м (7,93 м),
- между антеннами базовой станцией и выносной в положении №1: 12,25 м (11,44 м),
- между антеннами базовой станцией и выносной в положении №2: 12,67 м (11,37 м).
Результаты измерений показывают, что случайные погрешности при расположении антенны вблизи стены здания велики (σ~1÷3 м), при удалении от здания на 2 метра они уменьшаются: в положении №1 по широте в 1,45 раз, по долготе в 1,97 раз и в положении №2 в 1,53 раз, 5,61 раз соответственно. Большие смещения, по-видимому, вызваны малым числом спутников в рабочем созвездии для выносной станции.
Данная дипломная работа носит научно-исследовательский характер (НИР связана с проведением экспериментов, установлением определенных физических зависимостей и т.п.). Главной целью работы является анализ погрешностей спутниковой радионавигационной системы с использованием контрольных экспериментов.
Актуальность и необходимость проведения работ заключается в определении наиболее простого (дешевого) пути для уменьшении погрешности определения координат потребителя за счет методологических усовершенствований.
Для большей значимости данной работы используются реальные экспериментальные данные, затраты на которые незначительны по сравнению с затратами полного объема возможных работ.
Целесообразность выбора темы НИР и методов исследования на основе изучения литературы и научной информации основана на упрощении и удешевлении процесса обработки полученной информации и получении удобоваримой для понимания информации.
Планирование работ по ДП заключается в составлении перечня работ, необходимых для достижения поставленных задач; определении исполнителей каждой работы; установлении продолжительности работ в рабочих днях; построении линейного или календарного графика.
Прежде всего, необходимо правильно установить оптимальную величину работ по теме. При расчленении темы на крупные этапы план-график работ становится слишком общим. При слишком дробной детализации он трудно воспринимается. Поэтому в каждом отдельном случае следует найти оптимальную степень разбивки темы на отдельные этапы и работы, что обеспечит возможность эффективного контроля и управления за разработкой. Перечень этапов и работ приведен в таблице 6.1.
Таблица 6.1 - Перечень этапов и работ.
| Этап проведения НИР |
Вид работ |
| Разработка ТЗ |
Составление и утверждение ТЗ на НИР |
| Выбор направления исследования |
Сбор и изучение научно-технической литературы, нормативно-технической документации и др. материалов, относящихся к теме работы.
Составление аналитического обзора состояния вопросов по теме.
Формулирования возможных направлений решения задач, поставленных в ТЗ НИР и их сравнительная оценка.
Выбор и обоснование принятого направления проведения исследований (программы работ, плана-графика).
|
| Теоретические и экспериментальные исследования |
Разработка рабочих гипотез, построение моделей объекта исследования, обоснование допущений.
Выявление необходимости проведения экспериментов для подтверждения отдельных положений теоретических исследований.
Разработка частных методик проведения экспериментальных исследований.
Подготовка моделей (макетов, экспериментальных образцов), а также испытательного оборудования, необходимых для проведения экспериментальных исследований.
Проведение экспериментов, обработка полученных данных
Сопоставление результатов экспериментов с теоретическими исследованиями.
Корректировка теоретических моделей исследований.
Проведение дополнительных экспериментов (при необходимости).
|
| Обобщение и оценка результатов исследования |
Обобщение результатов предыдущих этапов работы. Оценка полноты решения поставленных задач.
Проведение дополнительных исследований, в том числе патентных (при необходимости).
Разработка рекомендаций по исследованию результатов проведения НИР.
Формулировка требований ТЗ на последующие НИР и ОКР.
Составление и оформление отчета.
Рассмотрение результатов проведенной НИР и приемка работ в целом.
|
Для планирования работ наиболее удобным является ленточный график планирования работ. Для построения ленточного графика необходимо рассчитать трудоемкость работ, это наиболее ответственная частью работ, так как трудозатраты составляют основную часть стоимости работы.
Предположим, что в разработке эскизного проекта будут принимать участие два человека: руководитель и инженер. Руководитель будет осуществлять постановку задачи, проверять ход работ и давать необходимые консультации, советы при разработке проекта. Инженер будет выполнять комплекс работ: изучение материалов, выбор вариантов построения этапов работы, разработка программного обеспечения, разработку документации.
Длительность этапов работ, выполняемых при разработке системы, приведен в таблице 6.2.
Для определения ожидаемой продолжительности работ  применим формулу 6.1. Эта формула основана на использовании трёх вероятностных оценок: применим формулу 6.1. Эта формула основана на использовании трёх вероятностных оценок:
 , , |
(6.1) |
где  – кратчайшая продолжительность данной работы (оптимистическая оценка); – кратчайшая продолжительность данной работы (оптимистическая оценка);
 – самая большая продолжительность работы (пессимистическая оценка); – самая большая продолжительность работы (пессимистическая оценка);
 – наиболее вероятная, по мнению экспертов, оценка продолжительность работ (реалистичная оценка). – наиболее вероятная, по мнению экспертов, оценка продолжительность работ (реалистичная оценка).
Таблица 6.
2 – Длительность этапов работ
| Наименование этапа работ |
Исполнители |
 |
 |
|
|
| 1) Составление и утверждение темы диплома |
Руководитель |
1 |
2 |
2 |
2 |
| Инженер |
2 |
3 |
3 |
3 |
| 2) Подбор и изучение литературы по тематике |
Руководитель |
4 |
5 |
6 |
5 |
| Инженер |
12 |
15 |
18 |
15 |
| 3) Определение источников погрешностей |
Руководитель |
3 |
4 |
4 |
4 |
| Инженер |
7 |
10 |
10 |
10 |
| 4) Анализ ранее полученных данных |
Руководитель |
2 |
4 |
4 |
4 |
| Инженер |
6 |
12 |
14 |
11 |
| 5) Создание и отладка программ |
Инженер
Программист
|
1
10
|
12
12
|
2
14
|
2
12
|
| 6) Анализ полученных данных |
Руководитель |
1 |
5 |
2 |
2 |
| Инженер |
10 |
5 |
14 |
12 |
| 7) Оформление раздела "Безопасности жизненной деятельности" |
Инженер |
2 |
3 |
4 |
3 |
| 8) Оформление раздела "Технико-экономическое обоснование" |
Инженер |
3 |
4 |
6 |
4 |
| 9) Оформление пояснительной записки |
Инженер |
4 |
7 |
11 |
7 |
| 10) Согласование и утверждение документов |
Инженер |
3 |
4 |
5 |
4 |
| Общая длительность работ |
Руководитель
Программист
Инженер
|
11
10
50
|
20
12
75
|
18
14
87
|
17
12
69
|
Для характеристики трудоемкости работы построим ленточный график выполнения работ, который приведен на рисунке 6.2.
Таблица 6.2 Ленточный график выполнения работ
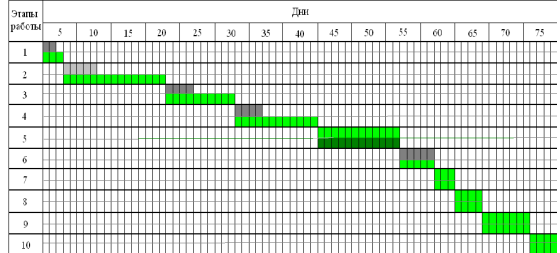
  Руководитель Инженер Программист Руководитель Инженер Программист
6.3 Расчет затрат на разработку темы
Проводим расчет сметной стоимости разработки. Целью планирования себестоимости проведения работ является экономически обоснованное определение величины затрат на ее выполнение. В плановую себестоимость включаются все затраты, связанные с ее выполнением независимо от источника их финансирования. Определение затрат производится путем составления калькуляции плановой себестоимости. Смета затрат на разработку состоит из прямых и накладных расходов.
Смета затрат на проектирование:
· материалы и комплектующие;
· основная и дополнительная з/плата исполнителей;
· отчисления во внебюджетные фонды;
· прочие прямые расходы;
· накладные расходы.
Затраты на вспомогательные материалы рассчитываются по формуле.
 , , |
(6.2) |
где  – количество вспомогательных материалов; – количество вспомогательных материалов;
 – цена на вспомогательные материалы. – цена на вспомогательные материалы.
Расчет затрат на материалы ( ) приведены в таблице 6.3. Исходными данными для данного расчета являются нормы расхода каждого вида ресурсов. ) приведены в таблице 6.3. Исходными данными для данного расчета являются нормы расхода каждого вида ресурсов.
Таблица 6.3 - Материальные ресурсы
| Вид ресурса |
Количество единиц
|
Цена за единицу, руб.
|
Общие затраты, руб.
|
| Печать демонстрационных листов |
6 |
40 |
240 |
| Канцелярские товары |
5 |
12 |
60 |
| Бумага (формат А0) |
6 |
5 |
30 |
| Бумага (формат А4) |
1 пачка |
105 |
105 |
| Программное обеспечение – 30 дневная версия Windows и MicrosoftOffice |
1 |
300 |
300 |
| Итого: |
735 |
На статью “Основная и дополнительная з/плата” относится з/плата научных сотрудников, инженеров (дипломников), лаборантов, научных руководителей.
Размер основной з/платы устанавливается, исходя из численности исполнителей, трудоемкости и средней з/платы за один рабочий день (таблица 6.4).
Средняя з/плата за один рабочий день определяется по формуле
 , , |
(6.3) |
где  – месячный оклад исполнителя; – месячный оклад исполнителя;
 – фонд времени в днях (23 рабочих дня в месяц при 5-ти дневной рабочей неделе). – фонд времени в днях (23 рабочих дня в месяц при 5-ти дневной рабочей неделе).
Для расчета месячных окладов исполнителей использовалась тарифная сетка по оплате труда работников бюджетных организаций и данные их должностных окладов.
Руководитель имеет 16 разряд, инженер – 10 разряд. По ЕТС оклад руководителя составит 2808 рублей, а инженера – 1764 рублей.
Дополнительная з/плата состоит из районного коэффициента, установленного для региона, на территории которого студент проходит преддипломную практику и дипломирование (в данном случае 30 %).
Результаты расчетов затрат на оплату труда исполнителей сведены в таблицу 6.4.
Таблица 6.4 - Расчет з/платы исполнителей.
| Исполнители |
Трудоёмкость, дней
|
Месячный оклад, руб.
|
Среднедневная з/плата, руб.
|
Сумма основной з/платы, руб.
|
Доп. зарплата, руб.
|
Общая сумма з/платы, руб.
|
| Инженер |
75 |
1764 |
76,70 |
5752,50 |
1725,80 |
7478,30 |
| Программист |
12 |
1764 |
76,70 |
920,40 |
276,10 |
1196,50 |
| Руководитель |
20 |
2808 |
122,10 |
2441,72 |
732,50 |
3174,22 |
| Итого:
|
8114,62 |
2734,40 |
11849,02 |
По Налоговому Кодексу от 1.01.2001 социальный налог взимается в процентах от основной и дополнительной заработной платы в размере 26%. Рассчитаем по формуле:
 , , |
(6.4) |
где ЗП
– общая основная и дополнительная з/плата с учетом районного коэффициента;
 – отчисления по единому социальному налогу (=0.26). 3080,75 руб. – отчисления по единому социальному налогу (=0.26). 3080,75 руб.
Размер страхового тарифа по обязательному социальному страхованию для сотрудников вузов равен 0,2% от основной и дополнительной заработной платы. Что составляет 23,70 рублей.
Фонд заработной платы рассчитывается по формуле
 |
(6.5) |
14953,46 руб.
На статью “Прочие прямые расходы” относятся затраты на аренду помещения, в котором выполняется проект, амортизацию.
Рассчитаем отчисления на амортизацию. Затраты на амортизацию вычислительной техники и принтера определяются по формуле:
 , , |
(6.6) |
где  – балансовая стоимость вычислительной техники; – балансовая стоимость вычислительной техники;
 – коэффициент годовой амортизации техники (=0,2); – коэффициент годовой амортизации техники (=0,2);
 – время работы ( – время работы ( дней); дней);
 эффективный фонд времени работы оборудования (365 дней для компьютера). эффективный фонд времени работы оборудования (365 дней для компьютера).
Балансовая стоимость вычислительной техники определяется следующим выражением:
 , , |
(6.7) |
где  – исходная стоимость вычислительной техники (20 000 руб.); – исходная стоимость вычислительной техники (20 000 руб.);
 – количество лет от покупки (3 года). – количество лет от покупки (3 года).
По последней формуле, определим балансовую стоимость вычислительной техники и затраты на амортизацию:
 руб. руб.
Расчет арендной платы. Арендную плату с учётом стоимости коммунальных услуг рассчитаем исходя из формулы:
 , , |
(6.8) |
где S – площадь арендуемого помещения, S = 9  ; ;
А – величина годовой арендной платы, А = 2160 руб/м2
с учетом затрат на электроэнергию и тепло;
В – время работы, B = 75 дней.
 руб. руб.
Расчет затрат на электроэнергию. Расчет затрат на электроэнергию произведем по формуле:
 , , |
(6.9) |
где  – установленная мощность, кВт; – установленная мощность, кВт;
– время работы оборудования, час;
 = 0,85 руб. за кВт/час. = 0,85 руб. за кВт/час.
Расчет сведем в таблицу 6.5.
Таблица 6.5 – Затраты на электроэнергию
| Название оборудования |
Потребляемая мощность, кВт |
Количество часов работы, час |
Сумма, руб. |
| Персональный компьютер |
0,28 |
600 |
168 |
| Принтер |
0,13 |
15 |
1,95 |
На статью “Накладные расходы” относятся затраты на управление и хозяйственное обслуживание при разработке проекта. Размеры накладных расходов планируются в размере от суммы всех прямых затрат на разработку научно-технического продукта в размере, установленном плановыми службами организации, где студент проходит преддипломную практику и дипломирование.
 , , |
(6.10) |
где  - прямые расходы, - прямые расходы,
 руб.; руб.;
 руб. руб.
В таблице 6.6 приведена смета всех затрат на проектирование, где накладные расходы, рассчитываются как 20% от всех прямых затрат с учетом районного коэффициента.
Таблица
6.
6 – Затраты на проектирование
| Наименование затрат |
Сумма затрат, руб.
|
| Зарплата – основная и дополнительная |
11373.20 |
| Налоги (социальный и медицинский) |
2979,75 |
| На материалы |
735 |
| Накладные расходы |
3877,64 |
| Затраты на амортизацию |
420,80 |
| Затраты на аренду |
3994,50 |
| Затраты на электроэнергию |
169,95 |
| Итого |
24 151,4 |
Посчитаем лимитную оценку изделия:
 , , |
(6.12) |
где  себестоимость; себестоимость;
 коэффициент рентабельности (0,25-0,3). коэффициент рентабельности (0,25-0,3).
В итоге лимитная оценка изделия составляет
30 189,25 руб.
Научно-исследовательский уровень работы оценивается возможностью использования результатов выполненных исследований в других научно – исследовательских и опытно конструкторских работах. Также обеспечивает получение информации, необходимой для создания новой техники.
Показатель научно-исследовательского уровня определяется следующим образом:
 , , |
(6.13) |
где НТ
– показатель научно – исследовательского уровня;
ki
– весовой коэффициент i-го признака уровня проекта
ni
– количественная оценка i-го признака уровня проекта
Оценка научно-исследовательского уровня проекта производится по следующим трем признакам:
Уровень новизны – k = 0.6
Теоретический уровень – k = 0.4
Возможность применения – k = 0.2
Таблица 6.7 – Баллы для оценки уровня новизны
| Уровень новизны |
Характеристики уровня новизны |
Баллы |
| Принципиально новая |
Новое направление в науке и технике, новые факты и закономерности, принципиально новое устройство, способ |
8÷10 |
| Новая |
По-новому объясняются те же факты, закономерности, новые понятия, дополняются и уточняются ранее полученные результаты |
5÷7 |
| Относительно новая |
Систематизируются, обобщаются имеющиеся сведения, новые связи между фактами, объектами, результатом является новые эффективные решения, более простые способы достижения прежних результатов, частичная модификация с признаком новизны |
1÷4 |
| Не обладающая новизной |
Результат, который ранее был известен |
0 |
Таблица 6.8 – Баллы значимости теоретических уровней
| Теоретический уровень полученных результатов |
Баллы |
| Установление закона, разработка новой теории |
10 |
| Глубокая разработка проблем, многоаспектный анализ, взаимосвязь между факторами с наличием объяснения |
8 |
| Разработка способа (алгоритм, программа) |
6 |
| Элементарный анализ связей между факторами (наличие гипотезы, классификатора, объяснение версии, практических рекомендаций частного характера) |
2 |
| Описание отдельных элементарных факторов (вещей, способов), изложение наблюдений опыта, результатов измерения |
0,5 |
Таблица 6.9 – Возможность реализации результатов
| Масштаб реализации |
Баллы |
| Народное хозяйство |
10 |
| Отрасль |
6 |
| Одно или несколько предприятий |
4 |
Согласно таблицам 6.7 – 6.9 имеем следующие коэффициенты: n1
=7, n2
=8, n3
=6.
Вычисляя по формуле 6.10, получаем: Hr=0.6*7+0.4*8+0.2*6=8.6
Таблица 6.10 – Оценка уровня развития проекта
| Уровень развития |
Баллы |
| Низкий |
1÷4 |
| Средний |
5÷7 |
| Сравнительно высокий |
8÷10 |
| Высокий |
11÷14 |
Трудовой процесс инженера-программиста сопровождается нервно-психологическим и физическим напряжением организма.
С развитием техники и широким внедрением механизации и автоматизации производственных процессов уменьшается роль физического труда человека, однако, возрастает роль умственной нагрузки и возникает проблема нервного утомления.
В целях предупреждения травматизма и профессиональных заболеваний при воздействии опасных и вредных производственных факторов на предприятиях применяются меры по их предупреждению и устранению, а также снижению степени воздействия на работающих людей.
Для снижения воздействия вредных факторов на инженера-программиста во время работы в первую очередь необходим их тщательный анализ.
Опасным
называется производственный фактор, воздействие которого на работающего в определенных условиях приводит к травме или другому внезапному резкому ухудшению здоровья. Если же производственный фактор приводит к заболеванию или снижению работоспособности, то его считают вредным
(ГОСТ 12.0.002-80).
В ГОСТ 12.0.003-74 «ССБТ. Опасные и вредные производственные факторы. Классификация» производится классификация элементов условий труда, выступающих в роли опасных и вредных производственных факторов. Они подразделяются на 4 группы:
· физические
· химические
· биологические
· психофизиологические.
Каждая группа в свою очередь подразделяется на подгруппы. На инженера-программиста, на его рабочем месте, воздействуют следующие опасные физические и вредные производственные факторы:
· повышенная запыленность воздуха рабочей зоны;
· повышенная температура воздуха рабочей зоны;
· повышенный уровень шума на рабочем месте;
· отсутствие или недостаток естественного света;
· недостаточная освещенность рабочей зоны.
К опасным психофизиологическим и вредным производственным факторам относятся нервно-психологические нагрузки (умственное перенапряжение, монотонность труда, эмоциональные перегрузки).
Данная работа относится к классу НИР, поэтому определяются факторы, возникающие при работе инженера-исследователя.
Инженер-программист не подвержен воздействию химических и биологических опасных и вредных факторов. Согласно ГОСТ 12.1.005-88 «Общие санитарно - гигиенические требования к воздуху в рабочей среде» работу инженера-программиста можно отнести к первой категории сложности, включающей в себя легкие физические работы, то есть работы, производимые сидя, стоя или связанные с ходьбой, но не требующие систематического физического напряжения при поднятии и переносе тяжестей. Энергозатраты - до 120 Ккал/ч.
В ходе работы инженер находится в помещении научной лаборатории или в домашних условиях. Необходимо сильное сосредоточие внимания, требуется выполнять творческую работу в условиях жесткого ограничения по времени, что может вызывать психические стрессы. Более половины времени приходится работать с ЭВМ и считывать информацию с монитора, подвергаться воздействию шума от вентилятора ЭВМ и от подвижных механизмов принтера и дисководов.
Из физических факторов действуют: влажность, температура, давление воздуха, подвижность воздуха, интенсивность теплового облучения, освещенность рабочей зоны, пониженная контрастность, излучение монитора ЭВМ. Из психофизиологических - нервно-психологическая перегрузка, которая выражается в умственном перенапряжении, перенапряжении глаз, эмоциональном перенапряжении.
Состояние воздушной среды определяется метеорологическими условиями на производстве, или производственным микроклиматом (температурой 18-25°С), влажностью (40-60) %, скоростью теплового излучения и поступлением вредных выделений в воздушную среду). Длительность воздействия на человека неблагоприятных метеорологических факторов резко ухудшает самочувствие, снижает производительность труда и часто приводит к заболеваниям.
Длительное воздействие шума большой интенсивности приводит к патологическому состоянию организма, к его утомлению. Утомление может постепенно перейти в глухоту и глухость, обнаруживаемые через несколько лет работы. Интенсивный шум вызывает изменение сердечно-сосудистой системы, сопровождаемый нарушением тонуса и ритма сердечных сокращений; изменяется кровяное артериальное давление. Шум приводит к нарушению нормальной работы желудка. Особенно страдает центральная нервная система.
Для создания нормальных условий для работы в вычислительном центре установлены нормы производственного микроклимата (ГОСТ 12.1.005-88 –«Общие санитарно - гигиенические требования к воздуху рабочей зоны»). Эти нормы устанавливают оптимальные и допустимые значения температуры, относительной влажности и скорости движения воздуха для помещений ВЦ.
Таблица 7.1 – Оптимальные и допустимые нормы микроклимата для закрытых рабочих помещений
Период года
|
Температура, °С |
Влажность, % |
Скорость движения воздуха |
| Опт. |
Доп. |
Опт. |
Доп. |
Опт. |
Доп. |
| холодный |
22-24 |
25 |
40-60 |
75 |
<0.1 |
0.1 |
| теплый |
23-25 |
28 |
40-60 |
75 |
0.1 |
0.1-0.2 |
Следует отметить, что при обеспечении оптимальных и допустимых показателей микроклимата в холодный период года необходимо применять средства защиты рабочего места от радиационного охлаждения от остекленных поверхностей оконных проемов, в теплый период года - от попадания прямых солнечных лучей
Интенсивность теплового облучения работающих от нагретых поверхностей технологического оборудования, осветительных приборов на постоянных и непостоянных рабочих местах согласно СанПиН 2.2.2/2.4.1340-03 не должна превышать 35 Вт/м2
при облучении 50% поверхности тела и более.
С физиологической точки зрения шум рассматривается как звук, мешающий разговорной речи и негативно влияющий на здоровье человека.
Шум является одним из наиболее распространенных в производстве вредных факторов. Люди, работающие в условиях повышенного шума, жалуются на быструю утомляемость, головную боль, бессонницу. У человека ослабляется внимание, страдает память. Все это приводит к снижению производительности труда.
Основными физическими величинами, характеризующими шум с точки воздействия на человека, являются: интенсивность, звуковое давление и частота. Согласно ГОСТ 12.1.003-83 ССБТ «Шум. Общие требования безопасности» - нормируемой шумовой характеристикой рабочих мест при постоянном шуме являются уровни звуковых давлений в децибелах в октавных полосах. Согласно этому ГОСТу, допустимые уровни звукового давления в октавных полосах частот, на рабочем месте программистов ЭВМ следует принимать согласно таблице.
Таблица 7.2 - Уровни звукового давления
| Средне геометрические частоты, Гц |
63 |
125 |
250 |
500 |
1000 |
2000 |
4000 |
8000 |
| Уровни звукового давления |
71 |
61 |
54 |
49 |
45 |
42 |
40 |
38 |
Характеристикой непостоянного шума на рабочем месте является интегральный критерий - эквивалентный по энергии уровень звука в дБ. Эквивалентный уровень звука составляет для нашего случая 50 дБ. Согласно ГОСТ 12.01.003-83 шум, создаваемый ЭВМ постоянный и составляет 10 дБ. Шум, производимый принтером - непостоянный. В ВЦ превышения звукового давления не наблюдается в соответствии с выше указанным ГОСТом.
К требованиям безопасности следует отнести требования к помещению, степени освещенности рабочего места, вентиляции и пожарной безопасности.
· Экран видеомонитора должен находиться от глаз пользователя на расстоянии 600-700 мм, но не ближе 500 мм с учетом размеров алфавитно-цифровых знаков и символов.
· Конструкция рабочего стола должна обеспечивать оптимальное размещение на рабочей поверхности используемого оборудования с учетом его количества и конструктивных особенностей, характера выполняемой работы. При этом допускается использование рабочих столов различных конструкций, отвечающих современным требованиям эргономики. Поверхность рабочего стола должна иметь коэффициент отражения 0,5 – 0,7.
· Конструкция рабочего стула (кресла) должна обеспечивать поддержание рациональной рабочей позы с целью снижения статического напряжения мышц шейно-плечевой области и спины для предупреждения развития утомления. Тип рабочего стула (кресла) следует выбирать с учетом роста пользователя, характера и продолжительности работы с ПЭВМ. Рабочий стул (кресло) должен быть подъемно-поворотным, регулируемым по высоте и углам наклона сиденья и спинки, а также расстоянию спинки от переднего края сиденья, при этом регулировка каждого параметра должна быть независимой, легко осуществляемой и иметь надежную фиксацию.
· Поверхность сиденья, спинки и других элементов стула (кресла) должна быть полумягкой, с нескользящим, слабо электризующимся и воздухопроницаемым покрытием, обеспечивающим легкую очистку от загрязнений.
Рабочие места проектируются с учетом усредненных антропометрических данных человека. При работе инженера за столом, конструкции стола и стула должны обеспечивать оптимальное положение тела человека. Расстояние от пола до поверхности стола должно составлять 0.75 м, высота сидения - 0.42 м, высота проема для ног - 0.6 м, глубина проема - 0.5м. Естественно, что данные значения усреднены и для разных людей они будут различны.
Эргономические требования, требования по обитаемости и требования технической эстетики к изделиям (системам "человек-машина") должны быть направлены на повышение эффективности деятельности и сохранение здоровья оператора, взаимодействующего с изделием за счет оптимизации (ГОСТ 20.39.108 - 85 "Требования по эргономике, обитаемости и технической эстетике"):
· структуры взаимодействия операторов и технических средств деятельности, физической, информационной, психологической, умственной нагрузок на оператора;
· условий деятельности, поддержания и восстановления здоровья и работоспособности.
Согласно ГОСТ 21889-76 "Кресло человека-оператора. Общие эргономические требования", кресло должно обеспечивать человеку -оператору соответствующую характеру и условиям труда физиологически рациональную рабочую позу.
Конструкция кресла не должна затруднять рабочих движений. Подвижность кресла относительно пола или другой поверхности, на которой оно установлено, может не ограничиваться. В случае необходимости обеспечения строго определенного положения человека - оператора по отношению к средствам отображения информации и органам управления, а так же в случае, если трудовая деятельность человека-оператора сопряжена с силовыми и резкими движениями, кресло должно быть зафиксировано.
При этом в зависимости от характера трудовой деятельности оператора, должна быть обеспечена возможность изменения положения кресла или сиденья в горизонтальной плоскости с фиксацией его в нужном положении.
При необходимости подвижность кресла должна задаваться также вращением кресла на 180 — 360° вокруг вертикальной оси опорной конструкции кресла с фиксацией в нужном положении. Кресло человека-оператора должно способствовать ослаблению вибрационных воздействий в полосе резонансных для человека частот и ударных воздействий до уровня допустимых. Конструктивные и отделочные материалы кресла должны быть прочными, огнестойкими, нетоксичными, обеспечивающими в необходимых случаях возможность эксплуатации в различных климатических условиях. Покрытия сиденья, спинки, подлокотников и подголовника должны изготовляться из умягченного,влагоотталкивающего,неэлектризующегося, воздухопроницаемого материала. Рабочее место при выполнения действий в положении сидя должно соответствовать нормам ГОСТ 12.2.032-78.
Взаимное расположение элементов рабочего места должно обеспечивать возможность осуществления всех необходимых движений и перемещений для эксплуатации и технического обслуживания оборудования. При этом должны ограничения, налагаемые спецодеждой и снаряжением человека-оператора.
Взаимное расположение элементов рабочего места должно обеспечивать необходимые зрительные и звуковые связи между оператором и оборудованием, а также между операторами. При расположении элементов рабочего места должны быть предусмотрены необходимые средства защиты человека-оператора от воздействия опасных и вредных факторов, предусмотренных ГОСТ 12.0.003-74, а так же условия для экстренного ухода человека-оператора с рабочего места.
Взаимное расположение элементов рабочего места должно способствовать оптимальному режиму труда и отдыха, снижению утомления оператора, предупреждению появления ошибочных действий.
ГОСТ 12.2.032-78 «Рабочее место при выполнении работ сидя» говорит о том, что высота рабочей поверхности стола должна быть 725 мм, высота сиденья 420 мм., размер площади для одного рабочего места не менее 6 кв.м, а объем помещения 20 куб.м. Угловой экран должен составлять не более 30 град. Средства отображения, требующие быстрого считывания, следует располагать в вертикальной плоскости ±15 град от нормальной линии взгляда и в горизонтальной от сагиттальной линии ±15 град.
В рабочей зоне необходимо исключение резких и подвижных теней, отблесков.
Анализ всех выявленных вредных факторов предусматривает разработку мер защиты. Для поддержания безопасных условий труда целесообразно проводить следующие мероприятия: влажная ежедневная уборка помещения, ежедневная проверка сохранности изоляции токоведущих частей аппаратуры и ее заземление, а также соблюдение всех правил техники безопасности на персональном компьютере.
Согласно ГОСТ 12.2.003-91 ССБТ. «Оборудование производственное. Общие требования безопасности» - требования безопасности на отдельные типы, виды оборудования устанавливаются с учетом особенностей конструкции и работы элементов и функциональных систем оборудования после определения возможных источников опасных и вредных факторов.
Все меры, связанные с обеспечением безопасности эксплуатации электроустановок, делятся на две большие группы: организационные и технические. К организационным мероприятиям относятся мероприятия, связанные с периодическим медицинским контролем здоровья персонала и выявлением его пригодности к работе на электроустановках.
Лица, обслуживающие и эксплуатирующие электроустановки, относятся к электротехническому персоналу. Электротехнический персонал должен быть физически здоровым, не иметь увечий и болезней, препятствующих или мешающих выполнению работы. Пригодность к обслуживанию электроустановок определяется при приеме на работу и периодически 1 раз в 2 года медицинским освидетельствованием. К работам в электроустановках допускаются лица в возрасте не моложе 18 лет.
К мероприятиям технического порядка следует отнести: недоступность токоведущих частей, защитное заземление, защитное зануление, защитное отключение.
Недоступность токоведущих частей для случайного прикосновения
обеспечивается следующими способами: ограждением и расположением токоведущих частей на недосягаемой высоте или в недоступном месте, рабочая изоляция. Ограждения в виде корпусов, кожухов, оград выполняются сплошными или сетчатыми. Для доступа непосредственно к электрооборудованию или токоведущим частям последнего (при осмотре или ремонте) в ограждениях предусматриваются открывающиеся части: крышки, дверцы, двери и т. д. Эти части закрываются специальными запорами или снабжаются блокировками. Блокировки по принципу действия бывают электрические и механические.
Защитное заземление
— это преднамеренное электрическое соединение с землей или ее эквивалентом металлических нетоковедущих частей, которые могут оказаться под напряжением. Защитное действие заземления основано на снижении напряжения прикосновения при переходе напряжения на нетоковедущие части, что достигается уменьшением потенциала корпуса относительно земли, как за счет малого сопротивления заземления, так и за счет повышения потенциала примыкающей к оборудованию поверхности земли.
Занулением
называется преднамеренное электрическое соединение с нулеым защитным проводником металлических нетоковедущих частей, которые могут оказаться под напряжением. Нулевой защитный проводник – это проводник, соединяющий зануляемые части с глухозаземленной нейтральной точкой обмотки источника тока или ее эквивалентом (ГОСТ 12.1.009-76). Зануление применяется в четырехпроводных сетях напряжением до 1000 В с заземленной нейтралью.
Защитное отключение
обеспечивает быстрое, не более 0.2 с автоматическое отключение установки от питающей сети при возникновении в ней опасности поражением током. Такая опасность может возникнуть при замыкании фазы на корпус электрооборудования, при снижении изоляции фаз относительно земли (повреждение изоляции, замыкании фазы на землю); при появлении в сети более высокого напряжения, при случайном прикосновении человека к токоведущим элементам, находящимся под напряжением.
7.2.4 Пожарная профилактика
Здание, где находится компьютерный класс и место программиста, построено из несгораемого материала - кирпича и относится к зданиям второй степени огнестойкости. В соответствии ОНТП 26-84 по оценке пожарной опасности производства, рабочее помещение относится к группе В.
Приведем возможные причины возникновения пожаров:
1) наличие твердых горючих веществ;
2) опасная перегрузка сетей, которая ведет за собой сильный разогрев токопроводящих проводников и загорания изоляции;
3) различные короткие замыкания;
4) пуск оборудования после ремонта.
Для предупреждения пожаров от коротких замыканий, перегрузок необходим правильный выбор монтажа и соблюдение установленного режима эксплуатации электрических сетей, дисплеев и других устройств.
Для предупреждения пожаров также необходимы, следующие мероприятия:
1) противопожарный инструктаж;
2) соблюдение противопожарных норм и правил при установке оборудования, освещения и других электросистем;
3) правильная эксплуатация оборудования;
4) правильное размещение оборудования;
5) современный профилактический осмотр, ремонт и испытание оборудования.
Для тушения пожаров можно применять: галоидированные углеводороды, углекислый газ, воздухо-механическую пену.
В здании на видном месте вывешен план эвакуации при пожаре, а также пожарный щит с огнетушителями и с другим противопожарным оборудованием.
7.3 Инструкции по технике безопасности
Инструкция является нормативным документом, определяющим требования безопасности при выполнении работающими своих должностных обязанностей или порученной им работы.
· При пользовании приборами, используемыми при монтаже и настройке устройства, работающие должны пройти инструктаж по общей технике безопасности и расписаться в журнале вводного инструктажа.
· Перед непосредственной работой необходимо изучить технические характеристики и работу приборов, которые будут использованы.
· Перед включением приборов необходимо проверить исправность сетевого шнура, убедиться, что устройство заземлено.
· Не включать в сеть компьютеры и другую оргтехнику со снятыми крышками;
· Запрещается загромождать рабочее место лишними предметами;
· В ходе работы должны быть выполнены следующие требования:
· Ввод – вывод рубильника должны быть заземлены экраном;
· При возникновении опасности поражения электротоком, рубильник немедленно отключается;
· По окончании работ, все приборы должны быть отключены от сети, полное выключение сети фиксируется рубильником.
· Запрещается пользоваться некалиброванными предохранителями.
· После завершения работы убрать рабочее место.
Напряжение на рабочем месте не должно превышать 220В, сопротивление изоляции токоведущих частей - выше 500 кОм, использование защитного заземления, наличие инструкции по эксплуатации электрооборудования.
7.3.2 Обязанности пользователя
При эксплуатации САПР следует руководствоваться правилами техники безопасности при работе с электроустановками до 1000 В. Пользователь должен предварительно пройти вводный инструктаж и инструктаж на рабочем месте. За невыполнение требований, содержащихся в инструкции, несется ответственность в дисциплинарном порядке. Обязанности пользователя:
· к работе допускается пользователь, прошедший инструктаж и имеющий соответствующий допуск по технике безопасности;
· содержать рабочее место в чистоте и порядке, на нем не должно быть лишних предметов, загрязняющих или загромождающих рабочее место;
· пользоваться оборудованием и приборами только по их назначению;
· на рабочем месте необходимо заниматься порученной для выполнения работой;
· по окончанию работы необходимо привести рабочее место в порядок;
· при получении травм необходимо обратиться в травмпункт или позвонить 03.
Пользователю запрещается:
· самостоятельно проводить ремонтные работы;
· раскрывать панель работающего устройства;
· курить в помещении;
· работать на неисправном оборудовании;
· подключать к сети неисправную вилку или розетку;
· отключать заземляющий проводник от электроустановки, находящейся во включенном состоянии.
7.3.3 Оказание первой помощи при поражении электрическим током
При поражении электрическим током пострадавший в большинстве случаев не может сам освободится от воздействия тока из-за непроизвольного сжатия мышц, тяжелой механической травмы или потери сознания. Поэтому необходимо, прежде всего, освободить пострадавшего от действия тока. После освобождения пострадавшего от действия тока необходимо приступить к оказанию первой помощи:
если пострадавший пришел в сознание, его нужно уложить на сухую подстилку и накрыть сухой одеждой. Вызвать врача. Нельзя разрешать ему двигаться, так как отрицательное действие тока может проявиться не сразу;
если пострадавший без сознания, но у него устойчивое дыхание и пульс, то его необходимо удобно уложить, обеспечить приток свежего воздуха, постараться привести в сознание (брызнуть в лицо водой, поднести нашатырный спирт) и ждать врача.
Признаками наступления клинической смерти являются: отсутствие дыхания, отсутствие пульса на сонных и бедренных артериях, отсутствие реакции зрачков на свет, серый цвет кожи.
Мероприятия по оживлению проводят в следующем порядке:
восстанавливают проходимость дыхательных путей;
проводят искусственное дыхание методом "рот в рот" или "рот в нос";
делают непрямой массаж сердца. Оказывать помощь нужно до прибытия врача.
При выполнении дипломного проекта были получены следующие результаты.
Теоретически оценены составляющие погрешности СРНС.
Проведены лабораторные эксперименты. В том числе:
- в автономном режиме с использованием C/A кода (псевдостатический режим);
- в дифференциальном режиме с использованием C/A кода (псевдостатический режим);
- в динамическом режиме с использованием P кода;
- в динамическом режиме в условиях затенения городской застройкой;
Результаты экспериментов в псевдостатическом режиме представлены ниже.
| Метод и основные параметры эксперимента |
СКО широты (м) |
СКО долготы (м) |
СКО высоты (м) |
| L1, автономный режим, C/A, временное усреднение за каждую секунду |
2.31 |
1.75 |
2.15 |
| L1, автономный режим, C/A, временное усреднение за каждый час |
1.46 |
1.51 |
2.17 |
| L1, дифференциальный режим, C/A, отчеты каждые 5 секунд (всего 1430) в условиях затенения |
0.26 |
0.73 |
0.20 |
| L1, дифференциальный режим, C/A, отчеты каждые 20 секунд (всего 357) в условиях затенения |
0.20 |
0.37 |
0.08 |
| L1, дифференциальный режим, C/A, отчеты каждую 1 секунду (всего 7198) в условиях затенения |
0.27 |
0.71 |
0.24 |
| L1, дифференциальный режим, C/A, отчеты каждую 5 секунду (всего 1439) в условиях затенения |
0.18 |
0.47 |
0.14 |
Результаты измерения в режиме с подвижной антенной (в том числе эксперименты с дискретно меняющейся высотой антенны вблизи затеняющей постройки) показаны на рисунках 5.5.5-5.5.8. гистограммы ошибок показаны на рисунках 5.5.10-5.5.17.
В экономической части дано технико-экономическое обоснование проведенного исследования и рассчитана себестоимость. Так же представлен ленточный график выполнения работ.
В разделе безопасности жизнедеятельности описаны мероприятия по охране труда людей и оказание первой помощи пострадавшим.
Выполненный дипломный проект соответствует требованиям технического задания (ТЗ). Полученные результаты позволяют сделать вывод, что цель, поставленная в техническом задании на дипломную работу, в ходе ее выполнения достигнута.
|