| Министерство Образования Республики Молдова
Технический Университет
Молдовы
Кафедра КПЭА
Курсовая работа
по дисциплине : Робототехника
тема : Проектирование манипулятора
Выполнил
cт. гр. EI – 972 Сороков А.С.
Проверил
доцент Мардаре И.А.
Кишинёв 2001
Содержание
Задание
Введение 4
1. Кинематическая схема манипулятора 6
2. Описание последовательности движений звеньев
манипулятора 7
3. Форма, размеры и расположение рабочей зоны 8
4. Упрощённая конструкция манипулятора со
связанными системами координат 11
5. Результирующие однородные матрицы преобразований
для каждой точки позиционирования 12
6. Принципиальная электрическая схема устройства управления 16
7. Сборочный чертёж манипулятора в прямоугольной
правосторонней системе координат 17
Заключение 18
Литература 19
CPAE EI 2102 972 17 ПЗ
Манипулятор
UTM FRE
EI - 972

1. Кинематическая схема манипулятора
На рисунке 1 представлена кинематическая схема манипулятора выполненная в правосторонней прямоугольной системе координат.
Индекс подвижности манипулятора : Пх
– В
z
- By

Рис. 1 Кинематическая схема манипулятора

2. Описание последовательности движений звеньев манипулятора
1. В исходном состоянии рабочий орган манипулятора находится в первой точке позиционирования, в начале системы координат. Ни одно из звеньев не совершало движения.
2. Звено один совершает перемещение, в результате чего рабочий орган перемещается из точки один в точку два.
3. Второе звено совершает перемещение, в результате чего рабочий орган поворачивается на 180° и подходит к точке три.
4. Звено один совершает перемещение, при этом рабочий орган перемещается в точку четыре.
5. Второе звено совершает перемещение, в следствии чего, рабочий орган поворачивается на 180° и возвращается в точку один.

3. Форма, размеры и расположение рабочей зоны
Для определения параметров рабочей зоны необходимо рассчитать геометрические размеры манипулятора.
Следовательно, необходимо определить размеры цилиндра поступательного перемещения, а также размеры цилиндра вращательного перемещения.
Сначала определим размеры цилиндра поступательного перемещения: Рис.2 Цилиндр поступательной подвижности
Определим длину цилиндра L по формуле:
 , где , где
Н – заданное поступательное перемещение
1,1 – взято из конструктивных соображений
Определим диаметр цилиндра в по формуле:


Определим размеры цилиндра вращательных подвижностей: Рис.3 Цилиндр вращательной подвижности
Определим длину цилиндра L по формуле:
 , где , где
Н – величина поступательного перемещения для поворота на необходимый угол, которая определяется по формуле Н = pd для поворота на угол 360°
d – диаметр вала вращения (4см)
0,05 – запас на поршни и другие конструктивные элементы
Так как имеется две вращательные подвижности, то была рассчитана длина каждой подвижности, которые равны:
Определим диаметр цилиндра в по формуле:
 , где , где
2,5 – коэффициент, учитывающий диаметр вала вращения и тодлщину рейки
1,1 – из конструктивных соображений
Результаты определения диаметра:

Рис.4 Параметры рабочей зоны
На рисунке 4 представлена рабочая зона рабочего органа. Из данного рисунка видно, что четыре точки позиционирования рабочего органа отмечены цифрами 1,2,3,4.

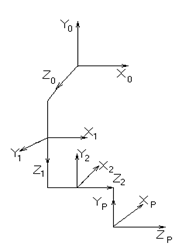
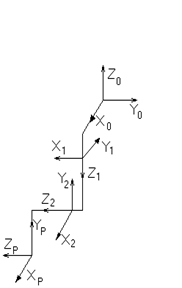
4. Упрощённая конструкция манипулятора со связанными системами координат
Рис.5 Упрощённая конструкция манипулятора со связанными системами координат
Связанные системы координаты расставлены в соответствии с представлениями Денавита – Хартенберга.
Система [X0
,Y0
,Z0
] – связанная система координат 1-го звена
[X1
,Y1
,Z1
] – связанная система координат 2-го звена
[X2
,Y2
,Z2
] – связанная система координат 3-го звена
[XР
,YР
,ZР
] – связанная система координат рабочего органа

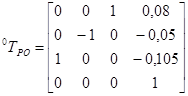
5. Результирующие однородные матрицы преобразований для каждой точки позиционирования
Результирующие однородные матрицы преобразования определяются с помощью уравнения кинематики манипулятора:
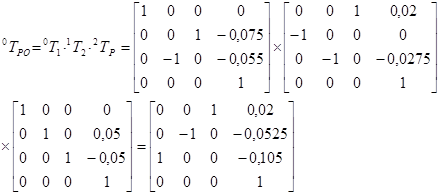
 Определение однородной матрицы преобразования для первой точки позиционирования рабочего органа: Определение однородной матрицы преобразования для первой точки позиционирования рабочего органа:



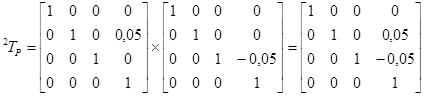
 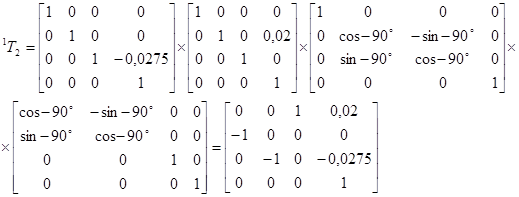


Однородная матрица преобразований для первой точки равна:

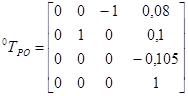
Определение однородной матрицы преобразования для второй точки позиционирования рабочего органа:


Произведя необходимые подсчёты, как в предыдущем случае получим однородную матрицу преобразований для второй точки:
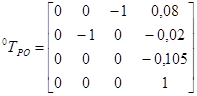
Определение однородной матрицы преобразования для третьей точки позиционирования рабочего органа:




Произведя необходимые подсчёты, как в предыдущем случае получим однородную матрицу преобразований для третьей точки:
 Определение однородной матрицы преобразования для четвёртой точки позиционирования рабочего органа: Определение однородной матрицы преобразования для четвёртой точки позиционирования рабочего органа:



Произведя необходимые подсчёты, как в предыдущем случае получим однородную матрицу преобразований для четвёртой точки:

6. Принципиальная электрическая схема устройства управления

7. Сборочный чертёж манипулятора в прямоугольной правосторонней системе координат
Рис. 7 Сборочный чертёж манипулятора в прямоугольной правосторонней системе координат

Заключение
В данной работе был спроектирован манипулятор, который производит технологическую операцию точечной сварки. Данный манипулятор может производить сварку в четырёх точках позиционирования, но при необходимости их количество можно увеличить до восьми.
Также в работе используется позиционная система управления и представлена схема электрическая принципиальная устройства управления, а также сборочный чертёж манипулятора.
Как показывает проект робот может справляться с некоторыми задачами выполняемыми людьми, а особенно незаменимой помощь подобного робота становится в сложных условиях, в которых человеку невозможно работать.

Литература
1. Конспект “Робототехника” Мардаре И.А., 2001,ТУМ
2. “Роботы и автоматизация производства”, Асфаль Р., М.:Машиностроение, 1989г.

Введение
Слово «робот» было введено в обращение чешским писателем Карелом Чапеком и первоначально означало: «машина с антропоморфным (человекоподобным) поведением, которое частично или полностью выполняет функции человека при взаимодействии с окружающим миром». Писателя-фантаста, химика по образованию, Айзека Азимова, многие называют теоретиком робототехники. Сам он пишет об этом следующее: «Я дожил до дня, когда мои законы воспринимают всерьез и цитируют в научных статьях ученые-робототехники». Первые роботы, имитировавшие внешний облик и движения человека, использовались в развлекательных целях. По мере развития техники роботы потеряли внешнее сходство с человеком и превратились в различные устройства и механизмы, которые освобождают людей от тяжелой и однообразной работы, от работы, опасной для здоровья (в условиях повышенной радиации, высокой или низкой температуры, в труднодоступных местах). В настоящее время робототехника представляет человеку огромный спектр вспомогательных устройств, начиная от роботов-сварщиков и заканчивая подводными телеуправляемыми системами. Лучшие умы планеты бьются над основной задачей, лежащей на стыке таких отраслей знаний, как искусственный интеллект, техническая кибернетика, психология, системный анализ, а именно — задачей наделить робототехническую систему разумом.
Промышленные роботы
Эта группа роботов также практически полностью лишена разума. Предназначены они лишь для того, чтобы заменить человека на всех трудных, монотонных, поточных работах. Эти роботы действуют на основании жестко описанных программ и иногда наполняют собой

автоматические линии, участки, а также способны выполнять полный производственный цикл. Ученые выделяют в этой группе три поколения роботов, но их назначение не меняется, они были и остаются неутомимыми рабочими, делающими свою работу 24 часа в сутки, не требуя зарплаты, доплаты за сверхурочные, премии и отпусков.
В предстоящей работе ставится задача по проектированию именно промышленного робота индекс подвижности манипулятора которого следующий ПХ
-ВZ
-BY
. Необходимо, чтобы этот робот совершал точечную сварку в четырёх точках позиционирования.
По окончании работы должна быть представленна принципиальная электрическая схема устройства управления.
|