Зміст
Вступ
1 Аналіз функціонування ЗЕМ на базі інформаційних технологій схемотехнічного проектування.
1.1 Характеристики і умови експлуатації ЗЕМ та його функціональні властивості у статичному режимі
1.2 Аналіз функціональних властивостей ЗЕМ у часовій та частотній областях
2 Проектування конструкторської реалізації ЗЕМ у формі ГІС.
2.1 Проектування плівкових пасивних елементів і конструкції ГІС…
2.2 Визначення параметрів паразитних елементів ГІС…
3 Аналіз впливу паразитних елементів і забезпечення функціональних властивостей ЗЕМ на базі СхСАПР
4 Висновки…
Вступ
У даній курсовій роботі проводиться функціональне моделювання і аналіз властивостей ЕЗ, моделювання його надійності у температурному діапазоні експлуатації, а також аналіз і реалізацію функціональних властивостей заданого електронного модуля (ЗЕМ), аналізу стану ЕЗ у статичному та динамічному режимах. При цьому потрібно розв’язати задачі з розробки конструкторської реалізації цифрового електронного модуля з урахуванням впливу конструктивно-технологічних і експлуатаційних чинників, зокрема паразитних зв’язків на підложці ГІС та параметрів умов експлуатації (температури, вологи, тиску), для чого потрібно знати:
- методику математичного моделювання сигналів та впливів у середовищі САПР;
- методику математичного моделювання надійності ЕКЗ з раптових відмов у заданому температурному діапазоні;
- методику реалізації ЗЕМ у формі тонко/товстоплівкової ГІС з урахуванням її конструктивних і схемотехнічних особливостей та умов експлуатації;
- методику математичного моделювання і аналізу функціональних властивостей ЗЕМ у статичному режимі, у часовій області у середовищі СхСАПР. При цьому треба уміти:
- проводити математичне моделювання надійності ЕКЗ з раптових відмов у заданому температурному діапазоні;
- розробляти технічну реалізацію ЗЕМ у формі тонкоплівкової ГІС з урахуванням її конструктивних і схемотехнічних особливостей та умов експлуатації;
- формувати математичні моделі і проводити аналіз функціональних властивостей ЗЕМ у статичному режимі, у часовій та частотній областях на базі СхСАПР;
- виконувати текстову та графічну документацію для ЗЕМ у формі ГІС.
1
Аналіз функціонування ЗЕМ на базі інформаційних технологій схемотехнічного проектування
1.1 Характеристики і умови експлуатації ЗЕМ та його функціональні властивості у статичному режимі
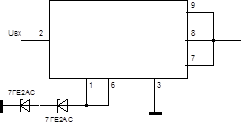
У якості ЗЕМ розглядається мікросхема – стабілізатор напруги К2ПП241. Схема електрична принципова та схема включення наведені на рисунках 1.1 та 1.2 відповідно.
Рисунок 1.1
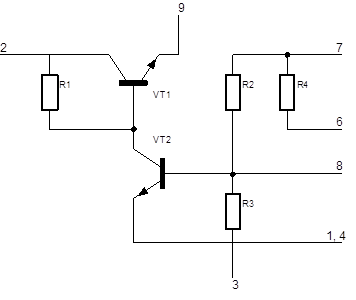
Рисунок 1.2
Технічні дані:
Ток, що споживається Iпот
=2,5 мА;
Вхідна напруга Uвх
=5,4÷12 В;
Стабілізована напруга Uстаб
=2,9÷3,9 В (визначається стабісторами);
Коефіцієнт стабілізації Кстаб
=5.
Умови експлуатації:
1. Вібрації 5 – 3000 Гц з прискоренням до 15g;
2. Багаторазові удари з прискоренням до 35g ;
3. Поодинокі удари з прискоренням до 150g на протязі 0,2 – 1,0 мс;
4. Лінійні навантаження: прискорення до 50g;
5. Температура навколишнього середовища від -60 до +70۫ С;
6. Відносна вологість при температурі +40۫ С до 98%;
7. Атмосферний тиск 6,7*102
÷3*105
.
Аналіз в статичному режимі проводився для трьох температур:
1. -60 ۫ С;
2. 27 ۫ С;
3. +70 ۫ С.
Мікросхема містить чотири резистори. Для здійснення нормального функціонування виробу було обрано номінальні опори резисторів:
| Позначення на схемі
|
Опір, Ом
|
| R1
|
1500
|
| R2
|
1000
|
| R3
|
1000
|
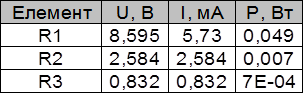
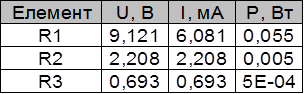
Базові дані зі статичного режиму.
Для режиму роботи при температурі -60°:

Таблиця1.1
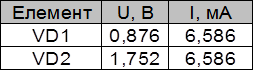
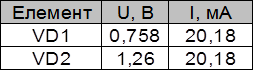
Напруги і струми для стабілітронів:
Таблиця 1.2
Напруги і струми для транзисторів:
Таблиця 1.3

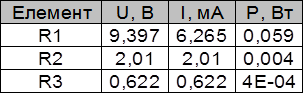
Для режиму роботи при температурі 27° (нормальні умови):

Таблиця 1.4
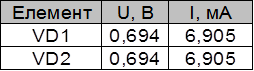
Напруги і струми для стабілітронів:
Таблиця 1.5
Напруги і струми для транзисторів:
Таблиця 1.6

Для режиму роботи при температурі +70°:

Таблиця 1.7
Напруги і струми для стабілітронів:
Таблиця 1.8
Напруги і струми для транзисторів:
Таблиця 1.9

Схеми принципові з показниками напруг та струмів, промодельовані для трьох температур знаходяться у Додатку 1.
1.2 Аналіз функціональних властивостей ЗЕМ у часовій області
Робота ЗЕМ у значній мірі характеризується динамікою, тобто функціональними властивостями у часовій області.
Моделювання проводиться в системі OrCad 9.2, в програмі Pspice Schematics.
Для моделювання задаємо наступні параметри:
1. У вікні Analisis Setup вибираємо пункти Temperature і Transient.
2. Натискуємо кнопку Temperature і зписуємо через кому три значення температури: -60, +25, +60.
3. Натискаємо кнопку Transient і вводимо наступні дані Print Step(Крок друку) задаємо 10нс, Final Time(Кінцевий час відліку) - 1 с, Step Ceiling – 10ms.
4. Як джерела сигналів обираємо джерело постійної напруги (VDC). Встановлюємо рівень сигналу DC=12V.
5. Запускаємо моделювання натиснувши Simulate.
Роздруковані часові діаграми приведені в додатку 2.
2 Проектування конструкторської реалізації МС К2ПП241 у формі ГІС
2.1 Проектування плівкових пасивних елементів і конструкції ГІС
Основна задача даного розділу - розрахунок і розробка топології і конструкції функціональних вузлів радіоелектронної апаратури у вигляді ГІС, в даному випадку – мікросхеми К2ПП241.
Вибір технології виготовлення ГІС базується на аналізі виробу:
- функція виготовляємої ГІС;
- масштаб виробництва;
- умови експлуатації;
- та ін.
і здійснюється відповідно до принципової схеми з урахуванням конструктивно-технологічних обмежень.
У залежності від способу формування плівкових елементів, ГІС підрозділяють на:
- тонкоплівкові;
- товстоплівкові.
Різноманітні методи формування конфігурації елементів у тонкоплівковій технології забезпечують формування плівкових елементів у широкому діапазоні значень їх параметрів із достатньо високою точністю і відтворенням.
Для даної мікросхеми було обрано саме тонкоплівковий метод.
Вихідні дані для розрахунку наведені у таблиці 2.1.
Так як номінал усіх резисторів лежить в межах 1 – 10 кОм, обираємо один резистивний матеріал для забезпечення необхідного опору.
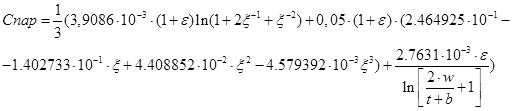
Визначаємо оптимальне значення питомого опору резистивного матеріалу по формулі 2.1:
 (2.1) (2.1)
де  – номінал і-го резистора, – номінал і-го резистора,
n – число резисторів.
Отримуємо оптимальне значення питомого упору 1145,644 Ом/кв.
Обираємо резистивну пасту із питомим опором, найближчим до розрахованого: сплав РС-3001 з питомим опором 1 кОм/кв та питомою потужністю розсіювання Р0
=20 мВт/мм2
Таблиця 2.1
| Позначення на схемі
|
Номінальний опір, Ом
|
Потужність, Вт
|
| R1
|
1500
|
0,059
|
| R2
|
1000
|
0,007
|
| R3
|
1000
|
0,0007
|
Конструктивний розрахунок тонкоплівкових резисторів полягає у визначенні форми, геометричних розмірів і мінімальної площі, що займають резистори на підкладці. При цьому необхідно, щоб резистори забезпечували розсіювання заданої потужності при дотримуванні необхідної точності  в умовах існуючих технологічних можливостей. в умовах існуючих технологічних можливостей.
Необхідно перевірити правильність вибору матеріалу з точки зору точності виготовлення резисторів.
Повна відносна похибка виготовлення плівкового резистора
 складається із суми похибок: складається із суми похибок:
 , (2.2) , (2.2)
де  - похибка коефіцієнта форми і відтворення розміру - похибка коефіцієнта форми і відтворення розміру 
резистивної плівки відповідно;  - температурна похибка; - температурна похибка;  - похибка, обумовлена старінням плівки; - похибка, обумовлена старінням плівки;  - похибка перехідних опорів контактів. - похибка перехідних опорів контактів.
Похибка коефіцієнта форми залежить від похибок геометричних розмірів (довжини  і ширини і ширини  ) резистора: ) резистора:
 (2.3) (2.3)
Похибка відтворення питомого поверхневого опору  залежить від умов напилювання і матеріалу резистивної плівки. В умовах серійного виробництва її значення не перевищує 5%. залежить від умов напилювання і матеріалу резистивної плівки. В умовах серійного виробництва її значення не перевищує 5%.
Температурна похибка залежить від ТКО матеріалу плівки:
 , (2.4) , (2.4)
де  - ТКО матеріалу плівки, 1/o
С або 1/K. - ТКО матеріалу плівки, 1/o
С або 1/K.
Похибка  обумовлена старінням плівки за рахунок повільної зміни структури плівки з часом і її окислювання. Вона залежить від матеріалу плівки та ефективності захисту, а також від умов зберігання і експлуатації. обумовлена старінням плівки за рахунок повільної зміни структури плівки з часом і її окислювання. Вона залежить від матеріалу плівки та ефективності захисту, а також від умов зберігання і експлуатації.
 , (2.5) , (2.5)
де  – час; – час;  - коефіцієнт старіння плівкового резистора, що визначає тимчасову нестабільність його опору. - коефіцієнт старіння плівкового резистора, що визначає тимчасову нестабільність його опору.
Похибка  сплаву РС-3001 становить ±0,5% сплаву РС-3001 становить ±0,5%
Похибка перехідних опорів контактів визначається технологічними умовами напилювання плівок, питомим опором резистивної плівки і геометричними розмірами контактного переходу: довжиною перекриття і шириною резистора. Її значення  Якщо матеріал контактних площадок обраний відповідно до табличних даних, то цією похибкою можна знехтувати. Якщо матеріал контактних площадок обраний відповідно до табличних даних, то цією похибкою можна знехтувати.
Значення похибок для даного випадку знаходяться у таблиці 2.2
Допустима похибка коефіцієнта форми:
 (2.6) (2.6)
Таблиця 2.2
| 
|

|

|

|

|
| 0,15
|
-2,60E-03
|
0,005
|
0,02
|
0,005
|
Оскільки отримане значення не є від’ємним, то можемо продовжувати розрахунки.
Визначаємо коефіцієнт форми:
 (2.7) (2.7)
| 
|
| R1
|
1,5
|
| R2
|
1
|
| R3
|
1
|
При  рекомендується конструювати резистор прямокутної форми типу “смужка”, у якого довжина рекомендується конструювати резистор прямокутної форми типу “смужка”, у якого довжина  більше ширини більше ширини  . .
Спочатку визначаємо мінімальну ширину резистора, використовуючи умову:
 , (2.8) , (2.8)
де  - мінімальне значення ширини резистора, обумовлене технологічними можливостями виготовлення; - мінімальне значення ширини резистора, обумовлене технологічними можливостями виготовлення;
 - мінімальне значення ширини резистора, що забезпечує задану точність виготовлення; - мінімальне значення ширини резистора, що забезпечує задану точність виготовлення;  - мінімальне значення ширини резистора, що забезпечує задану потужність розсіювання. - мінімальне значення ширини резистора, що забезпечує задану потужність розсіювання.
Мінімальне значення ширини резистора  знаходимо за формулою: знаходимо за формулою:
 (2.9) (2.9)

де  , ,  - похибки ширини і довжини, що залежать від методу виготовлення. - похибки ширини і довжини, що залежать від методу виготовлення.
Мінімальне значення ширини резистора розраховуємо за формулою:
 (2.10) (2.10)
За ширину резистора  приймаємо найближче до приймаємо найближче до  значення, кратне кроку координатної сітки, прийнятому для креслення топології з урахуванням масштабу. Для тонкоплівкової технології крок координатної сітки звичайно становить 1 або 0,5 мм (у даному випадку, якщо крок 1 мм, масштаб 20:1, то округлення роблимо до розміру, кратного 0,05 мм). значення, кратне кроку координатної сітки, прийнятому для креслення топології з урахуванням масштабу. Для тонкоплівкової технології крок координатної сітки звичайно становить 1 або 0,5 мм (у даному випадку, якщо крок 1 мм, масштаб 20:1, то округлення роблимо до розміру, кратного 0,05 мм).
Розрахункову довжину резистора визначаємо за формулою:
 (2.11) (2.11)
За довжину  резистора приймаємо найближче до резистора приймаємо найближче до  більше ціле значення, кратне кроку координатної сітки, прийнятому для креслення топології з урахуванням масштабу. більше ціле значення, кратне кроку координатної сітки, прийнятому для креслення топології з урахуванням масштабу.
Визначаємо повну довжину резистора з урахуванням перекриття контактних площадок. Для резистора, виготовленого масковим методом, вона буде дорівнювати:
 , (2.12) , (2.12)
де  - розмір перекриття резистивної плівки контактною площадкою. - розмір перекриття резистивної плівки контактною площадкою.
Потім визначаємо площу, яку займає резистор на підкладці.
 (2.13) (2.13)
Результати розрахунків:
Таблиця 2.8
|  , м , м
|
|
|

|

|

|
 , м2 , м2
|
 , мм2 , мм2
|
| R1
|
0,0001
|
0,000135501
|
0,001402
|
0,00145
|
0,002175
|
0,002375
|
3,4438E-06
|
3,44375
|
| R2
|
0,0001
|
0,000162602
|
0,000592
|
0,0006
|
0,0006
|
0,0008
|
0,00000048
|
0,48
|
| R3
|
0,0001
|
0,000162602
|
0,000187
|
0,0002
|
0,0002
|
0,0004
|
0,00000008
|
0,08
|
Для перевірки знаходимо дійсну питому потужність і похибку резистора. Резистор спроектований задовільно, якщо:
- питома потужність розсіювання  не перевищує припустиме значення не перевищує припустиме значення  : :
 ; (2.14) ; (2.14)
- похибка коефіцієнта форми не перевищує припустиме значення:
 ; (2.15) ; (2.15)
- сумарна похибка не перевищує допуск:
 (2.16) (2.16)
Розрахунки на основі вищевказаних формул проведені в електронній таблиці Excel та перевірені за допомогою програми, написаної на мові Borland C++ 5.02, роздруківка якої наведена у додатку 3.
Площу плати, необхідну для розміщення усіх елементів IС визначають, виходячи з того, що корисна площа плати, що займається елементами, компонентами і контактними площадками, дещо менша її загальної площі, що обумовлено технологічними вимогами й обмеженнями. З цією метою приймають коефіцієнт використання плата Кs
, значення якого в залежності від складності схеми і засобу її виготовлення складає 2...3.
Загальна площа плати:
 (2.17) (2.17)
де  - кількість плівкових резисторів; - кількість плівкових резисторів;
 , - площа i-го резистора; , - площа i-го резистора;
 - кількість навісних транзисторів; - кількість навісних транзисторів;
 - площа i-го транзистора; - площа i-го транзистора;
 - кількість контактних площадок під виводи корпусу; - кількість контактних площадок під виводи корпусу;
 - площа контактної площадки; - площа контактної площадки;
 - кількість контактних площадок під виводи навісних елементів; - кількість контактних площадок під виводи навісних елементів;
 - площа контактної площадки. - площа контактної площадки.
Отримали Sпідк
=26,5 мм2
Розраховану площу плати заокруглюють до площі, найближчої з рекомендованого ряду, що дозволяє орієнтовно визначити конструктивні ознаки корпуса ІС, за якими вибирають типорозмір придатного корпуса з числа нормалізованих.
Довжина l=6мм, ширина b=5 мм, типорозмір підложки – 11.
Обираємо корпус «Тропа».
Топологічне та збиральне креслення наведені у додатку 4.
2
.2 Визначення параметрів паразитних елементів ГІС
У розробленій топології є місця, котрі представляють собою паразитні елементи. Ескіз топології наведений на рисунку 1.

Для розрахунку паразитних ємностей використовуємо формулу:
 (2.11) (2.11)
Де b - довжина провідників, w – відстань між провідниками, h – товщина підложки, t – товщина провідників (мм),  . .
Згідно топології паразитні ємності будуть між виводами 1 і 2, 2 і 3 та 3 і 4, а також між виводами 7 і 8 та 8 і 9.
Розрахунок паразитних ємностей проводимо в програмі Microsoft Excel, записавши необхідні розрахунки.
Виводи 1 і 2 та 6 мають значну відстань паралельного проходження всередині мікросхеми.
Для паразитних індуктивностей використовуємо формулу
 (2.12) (2.12)
Початкові дані для розрахунку та результати зведені до таблиць 2.9 та 2.10.
Таблиця 2.9
| Довжина провідників, мм
|
Відстань між провідниками, мм
|
Ємність, пФ
|
| Виводи 1 2
|
3,175
|
0,2
|
0,780344
|
| Виводи 2 3
|
0,2
|
0,75
|
8,738025
|
| Виводи 3 4
|
1,4
|
0,575
|
7,54662
|
| Виводи 7 8
|
0,2
|
0,75
|
8,738025
|
| Виводи 8 9
|
0,2
|
0,75
|
8,738025
|
Таблиця 2.10
| Довжина провідників, мм
|
Індуктивність, нГ
|
| L1
|
3,8675
|
0,693372
|
| L2
|
3,1755
|
0,711979
|
| L3
|
3,2675
|
0,708133
|
Програма розрахунку паразитних параметрів знаходиться у додатку 4.
Товщина підкладки h=0,5мм, товщина доріжок t=0.01мм.
3 Аналіз впливу паразитних елементів і забезпечення функціональних властивостей ЗЕМ на базі СхСАПР
Визначені паразитні ємності вводимо до схеми ЗЕМ. Проводимо аналіз схеми у статичному режимі. Для його проведення необхідно провести моделювання схеми при трьох температурах: -60 ۫ , 25 ۫ , 60 ۫.
Також проводимо аналіз ЗЕМ з паразитними елементами у часовій області.
Схема з паразитними елементами, показники напруги та струму в схемах, а також аналіз схеми у часовій області зображені у додатку 5.
В цьому підрозділі проводимо порівняльний аналіз функціональних властивостей ЗЕМ з паразитними параметрами та без них у статичному режимі та у часовій області. Таким чином можемо зробити висновок про вплив паразитних елементів на роботу ЗЕМ і ефективність його конструкторської реалізації у формі ГІС.
Як ми виявили, паразитні параметри майже не впливають на роботу ЗЕМ. Це видно з статичних та часових характеристик які знаходяться а додатках 1, 2, 5.
Висновки
Виконавши курсову роботу розробили принципову схему ЗЕМ, промоделювали її в системі OrCad 9.2. Визначили параметри схеми у статичному режимі та у часовій області. Розробили топологію гібридної інтегральної схеми. Виконали розрахунки паразитних елементів ГІС, визначили їх вплив на робрту схеми у статичному та динамічному режимі.
|