Содержание.
1.
Показать преимущества и недостатки двух манометров ДИМ и ЭДМУ. Их погрешности и способы компенсации погрешности.
2.
2. Гировертикаль типа ЦГВ. Кинематическая схема, принцип действия.
3.
3. Комплексная информационная система сигнализации. Назначение, состав, выполняемые функции.
1.Показать преимущества и недостатки двух манометров ДИМ и ЭДМУ. Их погрешности и способы компенсации погрешности.
Манометры типа ЭДМУ.
Унифицированные электромеханические дистанционные манометры типа ЭДМУ предназначены для измерения давления топлива и масла в авиационных двигателях. Они выпускаются с различными диапазонами измерения в пределах 0...15 МПа
, их схемы отличаются однотипными элементами (кроме УЧЭ и шкалы). В манометре типа ЭДМУ (рис. 1) измеряемое давление ра
подается внутрь УЧЭ (при давлениях до 500 кПа — манометрическая коробка, до 10 МПа — мембрана, до 15 МПа — трубчатая пружина), перемещение УЧЭ через ПММ передается щетке ЕЗ
потенциометра.
Сопротивления Rs
и Ry
будут меняться в зависимости от входного давления. Для уменьшения температурных погрешностей обмотка потенциометра
выполняется из константана
.
Сопротивления Rx
и Ry
образуют два переменных плеча моста Андерсона. Два других плеча составляют резисторы Rl, R2. Катушки логометра LI, L2 (с сопротивлениями R5 и R6) вместе с резистором Ra
образуют диагональ моста. Катушки логометра имеют равное число витков, но различные сопротивления, так как габаритные размеры их неодинаковы. Сопротивление Rд
дополняет сопротивление катушки L1 до величины, равной сопротивлению второй катушки L2. Резисторы R3 (медь) и R4 (константен) предназначены для уменьшения погрешности из-за изменения сопротивления катушек при изменении температуры.
При изменении давления значения токов в катушках меняются и стрелка прибора будет отклоняться. Неподвижный магнит Е2 служит для возвращения стрелки к нулю.
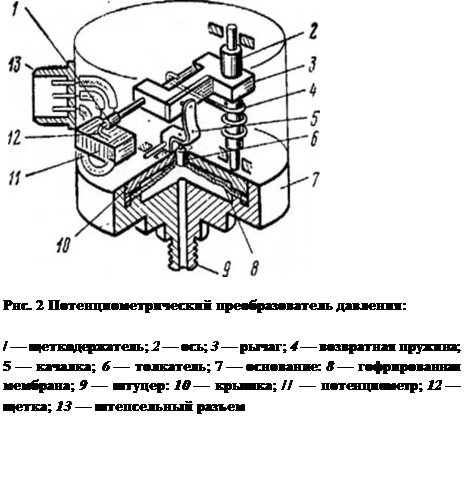
Потенциометрический преобразователь давления (рис. 2) состоит из толкателя 6, качалки 5, рычага 3 с осью 2 и щеткодержателя / с щеткой 12.
Указатель манометра типа ЭДМУ включает магнитоэлектрический логометр с подвижным магнитом и резисторы Rl, R2, R3, R4 и Rn
(рис. 3).
Две неподвижные проволочные катушки (рамки) 14 и 15, каждая из которых состоит из двух половинок с целью удобства крепления к оси 6 стрелки 1, расположены под углом 120°. Для устранения колебаний подвижной системы при неустановившихся режимах подвижной постоянный магнит // располагается внутри корпуса медного успокоителя 9. Ось 6 с обоих концов имеет керны. Верхний керн опирается на корундовый подпятник в винте 2, а нижний — на подпятник на дне успокоителя 9. Последний с крышкой 10 крепится внутри катушек 14 и 15. Балансировка подвижной системы осуществляется противовесами 5. Плата 7, служащая основанием конструкции указателя, примыкает к пермаллоевому экрану (на рисунке не показан), обеспечивающему защиту логометра от внешних магнитных возмущений.
С целью обеспечения симметрии электрической схемы сопротивления R1 и R2 равны. Логометр при расчете динамических характеристик можно представить как динамическое колебательное звено с передаточной функцией
W(P)
=
1/Jp2+fдр+Сж
где Сж
= Нти
— угловая жесткость системы подвижной магнит — магнитное поле; Н
—напряженность результирующего магнитного поля внутри логометра; тм
— магнитный момент подвижного магнита; fa
— коэффициент демпфирования; J
— момент инерции подвижной системы.
С целью регулировки начального значения выходного электрического сигнала в механизме потенциометрического преобразователя предусмотрен регулировочный винт, позволяющий перемещать потенциометр относительно щетки. Регулировка осуществляется при вывернутом штуцере атмосферного давления через отверстие в корпусе.
Манометры типа ЭДМУ имеют размах шкалы 120°
, сравнительно малые габаритные размеры, обладают взаимозаменяемостью преобразователя давления и указателя из разных комплектов с одними и теми же пределами измерения. Значительные погрешности (до ±4 %) и наличие скользящего контакта являются недостатками манометров этого типа.
Манометры типа ДИМ
.Манометры данного типа не требуют использования ПММ, в них отсутствуют трущиеся пары
.
Это обеспечивается использованием в качестве электрического преобразователя индуктивного преобразователя. Манометры типа ДИМ (дистанционные индуктивные) охватывают диапазон измеряемых давлений до 30 МПа
с пульсациями до 700 Гц. УЧЭ манометров типа ДИМ в зависимости от диапазона измеряемых давлений являются мембраны или мембранные коробки. Указателем является магнитоэлектрический двухкатушечный логометрический указатель с подвижным магнитом, по схеме подобным указателю манометра типа ЭДМУ.В схеме дифференциального индуктивного преобразователя давления (рис. 4) для исключения разрушения УЧЭ при больших давлениях предусмотрена предохранительная мембрана 7,
регулируемая упором 12.
В манометре типа ДИМ (рис. 5) при деформации УЧЭ перемещается якорь

18
(см. рис. 4), вызывающий изменение воздушных зазоров дифференциального индуктивного преобразователя, а соответственно и индуктивностей катушек Ы
и L2.
Катушки образуют два плеча мостовой схемы, в которой двумя другими плечами служат резисторы R1
и R2.
Так как логометр работает на постоянном токе, а индуктивный преобразователь питается переменным током, то в схеме в качестве выпрямителей используются диоды VI
и V2.
При изменении индуктивностей катушек L1
и L2
меняются токи в катушках L3
и L4
логометра. Подвижной магнит Е1
со стрелкой устанавливается по результирующему вектору магнитного потока катушек логометра. Неподвижный магнит Е2
служит для возврата стрелки к нулю. Погрешность манометров серии ДИМ при нормальных условиях не превышает ±4 %. Размах шкалы указателя 120°.
Рнс.4 Конструктивная схема индуктивного преобразователя давления:
/ — шток; 2
— гайка; 3, /4, 15
— винты; 4
— прокладка; 5 — кожух; * — штепсельный разъем; 7 — предохранительная мембрана; 8
— УЧЭ; 9 — корпус; 10 —
защитное кольцо; 11 —
крышка; 12 —
регулируемый упор; 13 —
плата: 16
— катушка с сердечником; 17
— противодействующая пружина; 18 —
подвижной якорь
2. Гировертикаль типа ЦГВ. Кинематическая схема, принцип действия.
/
Центральная гировертикаль (ЦГВ).
На ЛА она является гироскопическим датчиком, обеспечивающим сигналами углов крена и тангажа ряд потребителей (управляющую систему, курсовую систему, радиолокационную станцию и др.). Существует несколько модификаций ЦГВ, например ЦГВ-4, ЦГВ-10, МГВ. Однако принцип их действия аналогичен и может быть рассмотрен на примере схемы, изображенной на рис. (17.8). ЦГВ представляет собой двухосную гиростабилизированную платформу. Платформа 4
подвешена в раме 3.
На платформе расположены два двухстепенных гироскопа 2,
7, оси кинетических моментов которых направлены перпендикулярно плоскости платформы и в противоположные стороны. Сигналы, пропорциональные углам разворота гироузлов гироскопов относительно платформы, снимаются с потенциометров 10,12.
Напряжения с потенциометров поступают на стабилизирующие двигатели /, 8.
Потенциометры 10,12
и двигатели /, 8
образуют систему силовой разгрузки, обеспечивающую существенное снижение влияния внешних моментов по осям подвеса на точность выдерживания платформы в плоскости горизонта. При действии внешнего момента по оси 0хи
прецессирует гироскоп 7 и сигнал с потенциометра 10
поступает на стабилизирующий двигатель 8,
который создает момент стабилизации, уравновешивающий внешний момент. В том случае, если внешний момент действует по оси Оув
,
прецессирует гироскоп 2.
Вследствие этого появляется сигнал с потенциометра 12,
и двигатель / развивает момент, компенсирующий внешний момент.
Коррекция платформы по вертикали производится системой коррекции, включающей двух координатный жидкостный маятник // и коррекционные двигатели 5,6.
При отклонении платформы от плоскости горизонта относительно оси 0хн
сигнал с маятника // поступает на коррекционный двигатель 6". Последний создает момент относительно оси подвеса гироскопа 7, что вызывает прецессию платформы в направлении устранения ее рассогласования с плоскостью горизонта. Отклонение платформы от плоскости горизонта относительно оси Оуц
приводит к поступлению сигнала с маятника на коррекционный двигатель 5,
который создает момент относительно оси подвеса гироскопа 2.
Это вызывает прецессию платформы в направлении, противоположном направлению отклонения ее от плоскости горизонта. Сигналы, пропорциональные углам крена и тангажа, снимаются с датчиков 9,13.
Типовая электрокинематическая схема ЦГВ приведена на рис. (7)Гиростабилизированная платформа 8
выполнена в виде цилиндрического кожуха. Два гироузла 7, 9
располагаются на платформе друг над другом, образуя двухгироскопный узел.

Ось платформы закреплена в подшипниках наружной рамы 2.
В рабочем положении она горизонтальна и направлена в сторону крыльев. Ось наружной рамы закреплена в подшипниках корпуса прибора и направлена параллельно продольной оси самолета. Таким образом, угол поворота корпуса относительно наружной рамы равен углу крена самолета, а угол поворота наружной рамы относительно оси платформы равен углу тангажа.
Элементы схемы ЦГВ образуют три системы:
силовой разгрузки, состоящую из потенциометров разгрузки 6, 10
и стабилизирующих двигателей 3,12;
коррекции, состоящую из жидкостного маятника 4
и коррекционных двигателей 5,11;
ускоренного приведения к вертикали, состоящую из маятников 16, 17
и стабилизирующих двигателей 3,12.
Сигналы с потенциометров разгрузки, намотанных на корпуса гироузлов, снимаются с помощью щеток 14,15.
Принципы действия систем силовой разгрузки и коррекции описаны ранее.
Рассмотрим работу системы ускоренного приведения ЦГВ к вертикали. ЦГВ не имеет арретирующего устройства и, следовательно, в момент подачи питания на прибор рамы карданова подвеса занимают произвольное
 |
положение. При наклонах платформы относительно плоскости горизонта на углы более 2°, например, по оси подвеса наружной рамы у маятника 17
замыкается средний контакт с одним из крайних. Напряжение с маятника подается на стабилизирующий двигатель 12.
Оно по величине превышает напряжение с потенциометра 10.
Под действием момента, создаваемого двигателем 12,
гироскоп 9
будет прецессировать до упоров. Когда гироскоп ляжет на упоры, момент двигателя 12
поворачивает платформу вокруг оси подвеса наружной рамы как обыкновенное негироскопическое тело до размыкания контактов маятника 17.
После размыкания контактов маятника 17
платформа к вертикальному положению приводится системой коррекции, чувствительным элементом которой является жидкостный маятник 4.
Аналогично работает система приведения по оси подвеса платформы, включающая маятник 16
и двигатель 3.
Сигналы крена и тангажа снимаются с потенциометров /, 13.
3. Комплексная информационная система сигнализации. Назначение, состав, выполняемые функции.
Комплексную информационную систему сигнализации (КИСС),
входит в систему кабинной индикации самолета и обеспечивает отображение информации о состоянии самолетных систем и сигнальной информации об отказах на экранных индикаторах. КИСС предназначена
: для обеспечения безопасности полета за счет выдачи экипажу информации для надежного выполнения всех эксплуатационных задач; для повышения комфортности и разгрузки экипажа от выполнения логических операций; для своевременного «привлечения экипажа в особых ситуациях путем цветового кодирования сигналов, центральных сигнальных огней (ЦСО) и звуковой сигнализации.
КИСС выполняет прием, преобразование и логическую обработку сигналов, поступающих от датчиков и бортовых систем; отображенияинформацию о состоянии бортовых систем и изменении их параметром. осуществляет индикацию сигналов неисправности самолетных систем, производит запоминание сигналов неисправностей бортовых систем и выдачу их при послеполетном контроле; управляет работой цепи реальных сигнальных огней; формирует звуковые сигналы.
Структурно КИСС является двухканальной системой с перекрестными связями, содержащей три подсистемы: преобразования аналоговых и дискретных сигналов, сигнализации и отображения. КИСС создана на базе двух цветных электронно-лучевых трубок, установленных на приборной доске: левый и правый индикаторы. Цвет изображения: красный, желтый, голубой, синий, зеленый, белый, пурпурный. В процессе функционирования КИСС при полете на левом экране автоматически индицируются только те сигналы об отказах и неисправностях, которые требуют от экипажа каких-либо действий в данный момент.
В зависимости от срочности действий экипажа в той или иной ситуации КИСС выдает следующую сигнальную информацию: экстренную (аварийную), когда располагаемое время на парирование отказа Т
< 15 с; предупреждающую, когда располагаемое время на парирование отказа Т
> 15 с; сигнальную, не имеющую ограничений им времени.
Сигналы об отказах индицируются на экранах КИСС в соответствии с присвоенными категориями. При составлении текстов сигнальной информации на экране КИСС вначале указывается сокращенное обозначение системы, в которой произошел отказ, а затем указывается, что именно произошло. Сообщение об отказе индицируются красным или желтым цветом (в зависимости от категории), подсказка-напоминание экипажу о предписанных действиях — голубым. На маршруте левый экран полностью представлен для сигнальной информации.
В кабине экипажа устанавливаются два пульта КИСС. Левый пулы служит для управления левым экраном, правый пульт — правым экраном. При нажатии кнопки «ИМ» на ПУИ управление экранами меняется.
На лицевой панели пульта размещаются кнопочные переключатели, на которых указано сокращенное название систем и вид вызываемой информации. При нажатии на переключатель он светится голубым цветом.
Если кадровая информация какой-либо из систем состоит из нескольких кадров, то в качестве справки на первом кадре данной системы в нижней его части указывается число и краткое содержание каждого кадра. Перемещение кадров осуществляется повторным нажатием на кнопку данной системы.
В соответствии с перечнем предполетных проверок, указанным в РЛЭ, экипаж с помощью панели предполетного контроля, расположенной на боковой панели, и пультов КИСС может вызвать информацию по результатам контроля и состоянию бортовых систем. Для этого на панели контроля нажимают кнопку соответствующей системы, а на пульте КИСС — кнопку «Контр». При этом на экране появляется надпись «Контроль» и результаты контроля .
Если во время проведения контроля необходимо вызвать какую-либо другую информацию на этом экране, то на пульте КИСС нажимают кнопку соответствующей системы, информация контроля исчезнет и появится кадр вызванной системы.
После проведения предполетных проверок при подготовке к запуску двигателей нажимают кнопку «ККП» (карта контрольных проверок») на пульте КИСС. На экране появится надпись «Карта проверок», название этапа проверки и первый пункт этого этапа. При выполнении очередного пункта карты проверок повторное нажатие кнопки «ККП» сбрасывает предыдущий пункт и появляется следующий, заложенный в программу проверок. Когда выполнены все пункты, после очередного нажатия кнопки «ККП» появится сигнал «Карта проверок перед запуском двигателей окончена». После проведения карты контрольных проверок на этапе «Перед запуском двигателей» с пульта КИСС вызывается на правый экран кадр «Основные параметры двигателей» нажатием кнопки «ДВ», а на левый экран — кадр «Вспомогательные параметры двигателей» двойным нажатием кнопки «ДВ» левого пульта КИСС.
После запуска двигателей на правом экране автоматически индицируется кадр «Основные параметры двигателей», а на левом с помощью кнопки «Сброс» можно вызвать информацию по любой системе. При нажатии кнопки «Сброс» правого пульта панели на нем автоматически индицируется кадр «Основные параметры двигателей».
Перед рулением при страгивании ручки управления закрылками с нулевого положения автоматически на левом экране КИСС индицируется кадр «Управление», занимающий половину экрана. Кадр исчезает, когда ручка устанавливается в положение «О».
На исполнительном старте при разрешении взлета и установке РУДов во взлетное положение, если поступил хотя бы один сигнал, формирующий интегральную информацию «К взлету не готов», на левом экране под кадром «Управление» появится надпись «К взлету не готов» с указанием экипажу невыполненной операции или имеющейся неисправности. Надпись «К взлету не готов» высвечивается красным цветом, а информация, указывающая причину отсутствия готовности, — желтым.
При отказе во время полета левого экрана информация об отказах автоматически передается на правый экран. При этом кадр «Основные параметры двигателей» сбрасывается.
Список литературы.
1.
Воробьев В.Г. и др. Авиационные приборы, информационно-измерительные системы и комплексы. –М.: Транспорт,1992г.
2.
Зыль В.П. Воробьев В.Г. и др. Комплексы цифрового пилотажно-навигационного оборудования. Часть1 и 2-М.: МГТУ ГА, 1998г.
|