| Министерство образования РФ
_______________
Санкт-Петербургский государственный
электротехнический университет "ЛЭТИ"
________________________________________________________
ИССЛЕДОВАНИЕ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ
Методические указания
к лабораторным работам по дисциплине
"ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСТЕМЫ"
Санкт-Петербург
Издательство СПбГЭТУ "ЛЭТИ"
2000
УДК 62-50
Исследование систем автоматического управления: Методические указания к лабораторным работам по дисциплине "Электромеханические системы" / Сост.: С. Н. Гайдучок, Н. В. Соловьев. СПб.: Изд-во СПбГЭТУ "ЛЭТИ". 2000. 32 с.
Рассмотрены принципы построения и математическое описание замкнутых систем управления, а также приведены сведения по расчету и практическому определению их статических и динамических характеристик.
Предназначены студентам дневной и вечерней форм обучения специальности 210100 “Управление и информатика в технических системах”.
Утверждено
редакционно-издательским советом университета
в качестве методических указаний
ã СПбГЭТУ "ЛЭТИ", 2000
Настоящий цикл лабораторных работ знакомит студентов с основными принципами построения систем автоматического управления. Рассматриваются методы, позволяющие выполнить синтез сложных многоконтурных систем. Особенность данного цикла работ состоит в том, что применяемые в нем лабораторные стенды ранее использовались для проведения работ по курсу "Элементы и устройства автоматических систем", т. е. были получены результаты в виде математического описания элементов, которые используются в данном курсе для решения задач анализа и синтеза замкнутых систем управления.
Лабораторные стенды имеют в своем составе необходимые измерительные и регистрирующие приборы, а также персональные ЭВМ и устройства связи, используемые для автоматизации исследования и реализации законов управления.
Методические указания предназначены студентам дневной и вечерней форм обучения специальности 210100, изучающим курс "Электромеханические системы". Кроме того, они могут быть использованы студентами при изучении ряда разделов курса "Теория управления", "Локальные системы" или "Автоматизированное управление", в том числе и студентами других специальностей.
Целью
работы являются:
1. Исследование статических и динамических характеристик замкнутой маломощной системы регулирования скорости вращения двигателя постоянного тока при возможных изменениях коэффициента передачи и других параметров.
2. Расчет и практическая реализация корректирующих устройств.
3. Сравнение результатов расчета и эксперимента, в том числе с аналогичными результатами, полученными при проведении работы № 2.
Общие указания
В решении задач автоматизации технологических процессов важное место занимают проблемы регулирования скорости перемещения объектов. Существуют различные принципы организации систем регулирования скорости. В данной лабораторной работе предлагается исследовать одноконтурную систему регулирования скорости двигателя постоянного тока независимого возбуждения. Структурная и принципиальная схемы исследуемой системы представлены на рис. 1.1 и 1.2 соответственно.
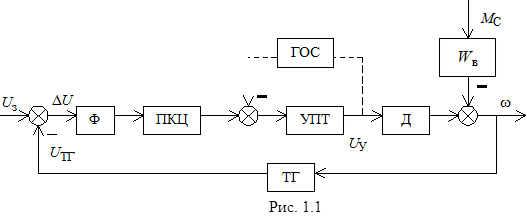 |
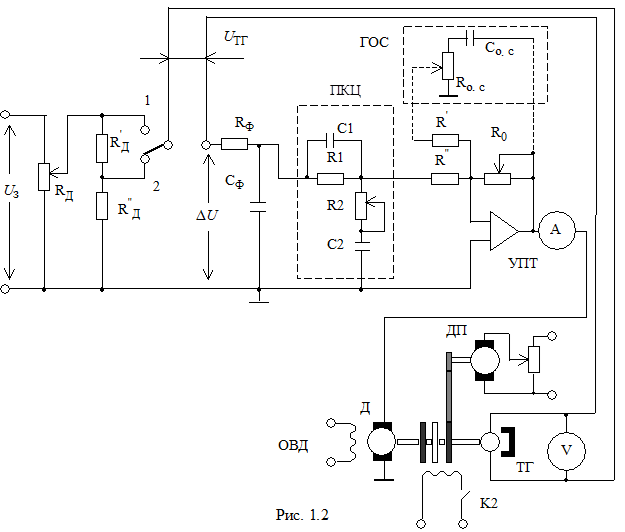 В работе предлагается рассчитать, реализовать и провести экспериментальное исследование системы регулирования скорости вращения двигателя в двух вариантах: с последовательной корректирующей цепью (ПКЦ) и с использованием гибкой обратной связи (ГОС). Статические и динамические показатели качества системы регулирования во многом определяются значением коэффициента передачи разомкнутой системы. Из представленной на рис. 1.2 принципиальной схемы видно, что единственным звеном, коэффициент передачи которого можно изменять, является усилитель постоянного тока (УПТ).
При заданных значении установившейся ошибки регулирования и диапазоне регулирования скорости необходимый коэффициент передачи разомкнутой системы определяется по формуле
 , (1.1) , (1.1)
где 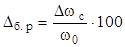 - относительная ошибка в системе без регулятора, т.е. отношение естественного перепада скорости двигателя Δωс
при номинальном моменте сопротивления нагрузки на валу двигателя М
Д
= М
С
к скорости идеального холостого хода ω0
, %, при ω0
= ωmin
; - относительная ошибка в системе без регулятора, т.е. отношение естественного перепада скорости двигателя Δωс
при номинальном моменте сопротивления нагрузки на валу двигателя М
Д
= М
С
к скорости идеального холостого хода ω0
, %, при ω0
= ωmin
;  - ошибка регулирования, выражающая отношение абсолютного значения ошибки в системе регулирования Δωр
при М
Д
=
М
С
к скорости идеального холостого хода ω0
, %, при ω0
= ωmax
; - ошибка регулирования, выражающая отношение абсолютного значения ошибки в системе регулирования Δωр
при М
Д
=
М
С
к скорости идеального холостого хода ω0
, %, при ω0
= ωmax
;  - коэффициент передачи разомкнутой системы ( k
У
- коэффициент передачи усилителя УПТ; k
Д
- коэффициент передачи двигателя Д; k
ТГ
- коэффициент передачи тахогенератора ТГ). - коэффициент передачи разомкнутой системы ( k
У
- коэффициент передачи усилителя УПТ; k
Д
- коэффициент передачи двигателя Д; k
ТГ
- коэффициент передачи тахогенератора ТГ).
При выполнении лабораторной работы № 1 по курсу "Элементы и устройства автоматических систем", в которой использовался этот же стенд, были изучены элементы данной структурной схемы и в результате анализа снятых статических и динамических характеристик и необходимых расчетов были определены Δωс
, k
Д
, k
ТГ
, T
ЭМ
,
диапазон изменения k
У
. Параметр, требующий более тонкого эксперимента, указан на лицевой панели макета (T
У
). Элементы рассматриваемой системы регулирования скорости хорошо известны и имеют следующие передаточные функции:
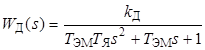 - передаточная функция двигателя по управляющему воздействию; - передаточная функция двигателя по управляющему воздействию;
 - передаточная функция двигателя по возмущающему воздействию; - передаточная функция двигателя по возмущающему воздействию;
 - передаточная функция усилителя; - передаточная функция усилителя;
 - передаточная функция тахогенератора; - передаточная функция тахогенератора;
 - передаточная функция фильтра, используемого для сглаживания коллекторных пульсаций ТГ. - передаточная функция фильтра, используемого для сглаживания коллекторных пульсаций ТГ.
Реализация замкнутой системы требует расчета коррекции. Расчет корректирующих устройств (ПКЦ и ГОС) можно производить вручную, используя, например, ЛАЧХ, или с помощью ПЭВМ. И в том и в другом случае необходимо стремиться к тому, чтобы при хороших динамических показателях качества системы конфигурация корректирующих цепей и их параметры соответствовали возможностям их реализации на лабораторном стенде. После проведения расчета следует реализовать систему регулирования, определить ее статические и динамические показатели качества и сравнить их с расчетными. При известных параметрах системы ошибка регулирования по возмущающему воздействию может быть рассчитана из (1.1)
 . (1.2) . (1.2)
Для определения качественных показателей системы по управляющему воздействию на стенде имеется тумблер К1. Возмущающее воздействие на систему подается с помощью тумблера К2 "ВКЛЮЧЕНИЕ МУФТЫ" и регулируется потенциометром "МОМЕНТ СОПРОТИВЛЕНИЯ".
Порядок выполнения работы
1. Ознакомиться с общими указаниями к выполнению данной лабораторной работы. Вариант задания получить у преподавателя заранее, во время завершения предыдущей работы.
2. Ознакомиться с расположением элементов системы и органов управления на лицевой панели макета и их назначением .
3. Рассчитать параметры ПКЦ для выполнения полученного варианта работы.
4. Перед включением тумблера "СЕТЬ" установить потенциометр задающего напряжения U
з
в положение "0" (при этом тумблер К1 должен быть в верхнем положении 2), коэффициент усиления усилителя в положение "10", момент сопротивления - "0", т. е. тумблер включения муфты К2 установлен в положение "ВЫКЛЮЧЕНО".
5. Собрать схему регулирования скорости без корректирующих устройств. Фильтр с заданным значением Т
Ф
должен быть включен в схему. Измерительный прибор U
ТГ
необходимо подключить к тахогенератору. Включить тумблер "СЕТЬ", убедиться в правильности включения обратной связи по скорости. Увеличивая коэффициент передачи усилителя, определить значение критического коэффициента передачи системы. Выключить тумблер "СЕТЬ".
6. В соответствии с принципиальной схемой ввести в систему ПКЦ. Установить параметры корректирующей цепи в соответствии с расчетами предыдущего п. 3, выставить заданное значение k
У
, включить тумблер "СЕТЬ".
7. С помощью задающего потенциометра RД
установить максимальное значение напряжения на выходе усилителя U
У
= 20 В, соответствующее максимальному значению регулируемой скорости двигателя ωmax
. Рассчитать значение ωmax
и определить ее экспериментально, используя измерительные приборы. Эксперименты проводить для двух заданных значений k
У
.
8. Подключить к дополнительным клеммам тахогенератора осциллограф и по кривой переходного процесса, наблюдаемого на экране осциллографа, определить время регулирования t
р
и максимальное перерегулирование σmax
% исследуемой системы, при ступенчатом изменении задающего напряжения ΔU
З
(тумблером К1) .
9. При значении U
У
= 20 В включить муфту тумблером К2 и установить потенциометром "МОМЕНТ СОПРОТИВЛЕНИЯ" ток якоря двигателя I
Я
= 1.5 А. Включая и выключая муфту (К2) зарисовать переходный процесс ω(t
) с экрана осциллографа при сбросе и набросе нагрузки, определив при этом значение установившейся ошибки Δωр
от возмущающего воздействия:  , а U
У
- напряжение на выходе УПТ на холостом ходу двигателя, U
ТГ
с
- напряжение тахогенератора при I
Я
= 1.5 А. Подключив вольтметр к выходу элемента сравнения и измерив ΔU
, определить суммарную ошибку системы регулирования скорости , а U
У
- напряжение на выходе УПТ на холостом ходу двигателя, U
ТГ
с
- напряжение тахогенератора при I
Я
= 1.5 А. Подключив вольтметр к выходу элемента сравнения и измерив ΔU
, определить суммарную ошибку системы регулирования скорости  . .
10. С помощью задающего потенциометра R
Д
установить минимальное значение напряжения на выходе усилителя U
У
= 5 В, соответствующее минимальному значению регулируемой скорости двигателя ωmin
и при данном значении скорости повторить эксперименты по пп. 8 и 9.
11. Рассчитать параметры ГОС и включить ее вместо ПКЦ.
12. Повторить все эксперименты исследования системы регулирования скорости в соответствии с пп. 7–10.
Оформление отчета
Результаты выполненной работы должны быть представлены в виде отчета, содержащего:
1. Структурную схему системы регулирования скорости.
2. Принципиальную схему макета установки.
3. Расчет параметров корректирующих цепей (ПКЦ и ГОС).
4. Расчет установившихся ошибок по возмущающему воздействию в процентах к естественному перепаду скорости двигателя Δωс
и в процентах к регулируемому значению скорости вращения двигателя в соответствии с (1.2) относительно ωmax
и ωmin
.
5. Результаты моделирования систем с ПКЦ и ГОС (приводятся при машинном расчете системы), т. е. зависимость ω(t
) для управляющего и возмущающего воздействий.
6. Результаты экспериментального исследования систем регулирования с ПКЦ и ГОС при задании ωmax
и ωmin
.
7. По данным экспериментов для всех случаев необходимо определить t
р
, σmax
%, а также значения установившихся ошибок от возмущающего воздействия Δωр
и суммарную ошибку регулирования Δω: их абсолютные значения, а также в процентах к естественному перепаду скорости двигателя Δωс
и значениям регулируемых скоростей ωmax
и ωmin
в процентах.
8. Сравнение по всем вариантам исследования расчетных и экспериментальных данных, для чего полученные результаты необходимо представить в виде сводной таблицы.
| Показатель качества системы регулирования
|
Система с ПКЦ
|
Система с ГОС
|
| Расчет или моделирование
|
Обработка данных эксперимента
|
Расчет или моделирование
|
Обработка данных эксперимента
|
| ω0
= ωmax
|
ω0
= ωmin
|
ω0
= ωmax
|
ω0
= ωmin
|
| Δωр
, рад/с
|
|
|
|
|
|
|
| Δωр
/Δωс
, %
|
|
|
|
|
|
|
| Δωр
/ω0
, %
|
|
|
|
|
|
|
| Δр
, %
|
Расчет по формуле (1.2) при заданных параметрах
|
| t
р
, c
|
|
|
|
|
|
|
| σm
ах
%
|
|
|
|
|
|
|
9. Выводы по работе.
Целью
работы являются:
1. Изучение принципов построения и практической реализации систем подчиненного регулирования.
2. Овладение навыками расчета и настройки регуляторов системы подчиненного регулирования.
3. Расчет и практическое определение статических и динамических характеристик системы регулирования скорости при различных видах настройки регуляторов.
4. Сравнение полученных результатов и их сопоставление с аналогичными результатами исследования одноконтурной системы регулирования скорости (работа № 1).
Общие указания
Построение систем по принципу подчиненного регулирования представляет собой один из способов реализации систем автоматического управления с высокими статическими и динамическими характеристиками. Системы, построенные по многоконтурному варианту – принципу подчиненного регулирования, обладают существенными достоинствами. Идеи построения систем по принципу подчиненного регулирования возникли и успешно применяются при автоматизации электроприводов главным образом постоянного тока. Однако эти идеи с успехом могут быть использованы для решения задач синтеза и других систем управления. Сущность данного подхода заключается в том, что в системе помимо основной регулируемой величины рассматриваются и другие (промежуточные) координаты, определяющие состояние системы, а затем образуются контуры регулирования всех выделенных величин. Таким образом, получают многоконтурную систему, в которой контуры как бы вложены последовательно от внутреннего контура к внешнему – контуру регулирования основной физической величины. При таком подходе используется как бы метод последовательной коррекции в сочетании с корректирующими обратными связями. Каждый контур, начиная с внутреннего, настраивается таким образом, чтобы разомкнутый контур представлял собой реальную однократно интегрирующую систему. Реальность состоит в том, что реализовать идеальную интегрирующую систему не представляется возможным, поскольку в каждом контуре помимо больших постоянных времени объекта, подлежащих компенсации, содержатся одна или несколько малых, не компенсируемых постоянных времени (усилителей, преобразователей, фильтров).
 |
Настройка регулятора обеспечивает реализацию контура как системы второго порядка с одним интегрирующим и одним инерционным звеньями, постоянная времени которого есть некомпенсируемая малая постоянная или сумма всех малых постоянных данного контура. Малая постоянная времени замкнутого внутреннего контура обычно является некомпенсируемой малой постоянной времени последующего внешнего контура, а если в этом контуре есть еще и свои малые постоянные времени (например, фильтров), то его малая постоянная времени снова образуется как сумма всех малых постоянных. В лабораторной работе рассматривается система регулирования скорости двигателя постоянного тока независимого возбуждения с подчиненным токовым контуром, структурная схема которой представлена на рис. 2.1. Данная структура включает следующие элементы: Ф - фильтр, предназначенный для сглаживания коллекторных пульсаций тахогенератора; РС - регулятор скорости; РТ - регулятор тока; У - усилитель мощности; Д - двигатель постоянного тока (пунктиром показана внутренняя обратная связь по ЭДС); ДТ - датчик тока; ДС - датчик скорости. 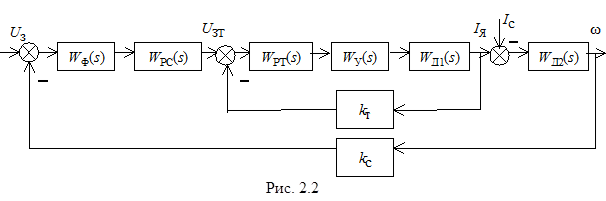 |
В результате структурных преобразований избавляемся от перекрещивающихся связей и получаем структуру, представленную на рис. 2.2, включающую все ранее перечисленные элементы с указанием передаточных функций:  ; ;  ?, ?,  ? - требуется определить в результате расчета; ? - требуется определить в результате расчета;  ; k
т
- коэффициент передачи обратной связи по току; k
с
- коэффициент передачи обратной связи по скорости. ; k
т
- коэффициент передачи обратной связи по току; k
с
- коэффициент передачи обратной связи по скорости.
Передаточная функция двигателя в результате преобразований представлена в виде двух звеньев W
Д1
(s
) в контуре тока и W
Д2
(s
) в контуре скорости:  для случая, неучитывающего влияния внутренней обратной связи по ЭДС, т. е. при T
ЭМ
>>T
Я
, или для случая, неучитывающего влияния внутренней обратной связи по ЭДС, т. е. при T
ЭМ
>>T
Я
, или  с учетом влияния обратной связи по ЭДС; с учетом влияния обратной связи по ЭДС;  , ,  , ,  , R
Ш
- сопротивление обратной связи по току. , R
Ш
- сопротивление обратной связи по току.
Расчет контура тока
Расчет начинается с внутреннего контура - контура тока. В этом контуре в качестве компенсируемой части объекта принимается входящая в него передаточная функция двигателя W
Д1
(s
).
Некомпенсируемым звеном является усилитель, постоянную времени которого принимаем за малую постоянную времени контура тока, т. е. T
μт
= T
У
,
где Т
μт
–
малая некомпенсируемая постоянная времени контура тока. Тогда, в соответствии с изложенным, ставиться задача определения передаточной функции регулятора тока W
PT
(s
) из условия получения передаточной функции разомкнутого контура тока W
KT
(s
) в виде однократно интегрирующей системы, т. е.
 , ,
где Т
0
–
параметр, определяемый настройкой регулятора.
Известно, что динамические качества контура определяются видом передаточной функции замкнутого контура. Для замкнутого контура тока имеем
 . (2.1) . (2.1)
Выражение (2.1) может быть представлено как передаточная функция стандартного колебательного звена, т. е.
 , ,
 , ,  , ,
где Т
- постоянная времени колебательного звена; ζ - коэффициент затухания (или демпфирования) колебательного звена.
При ζ = 1, т. е. при  имеем предельный случай апериодического звена. Однако при выборе соотношения имеем предельный случай апериодического звена. Однако при выборе соотношения  , ,  обеспечивается большее быстродействие, поскольку в технических системах длительность процесса определяется временем вхождения в зону установившегося значения с точностью обеспечивается большее быстродействие, поскольку в технических системах длительность процесса определяется временем вхождения в зону установившегося значения с точностью  %. В случае %. В случае  и ζ=0.707 имеем колебательный процесс, но с максимальным перерегулированием всего 4.3 %, вот почему в этом случае быстродействие будет выше, чем при и ζ=0.707 имеем колебательный процесс, но с максимальным перерегулированием всего 4.3 %, вот почему в этом случае быстродействие будет выше, чем при  . Настройка контура на соотношение и ζ = 0.707 является настройкой на модульный оптимум (МО). Итак, для контура тока имеем: . Настройка контура на соотношение и ζ = 0.707 является настройкой на модульный оптимум (МО). Итак, для контура тока имеем:
 , ,
а так как  ,то ,то
 . (2.2) . (2.2)
С другой стороны, из структурной схемы (рис. 2.2) имеем:
 , ,
откуда
 . (2.3) . (2.3)
Подставив в (2.3) выражения передаточных функций всех звеньев, а W
KT
(s
) из (2.2), получим передаточную функцию регулятора, при этом принято W
Д1
(s
) без учета влияния ЭДС, так как в нашем случае Т
ЭМ
>>Т
Я
:
 , ,
или
 , ,
где  ; ;  ; ;  . .
Расчет контура скорости
Контур скорости включает в себя замкнутый контур тока. Структурная схема представлена на рис. 2.3. При настройке контура на модульный оптимум передаточная функция контура имеет вид:
 , , где  - некомпенсируемая малая постоянная времени контура скорости. - некомпенсируемая малая постоянная времени контура скорости.
Из структурной схемы рис. 2.3 имеем
 . (2.4) . (2.4)
Из (2.4) выражаем передаточную функцию регулятора скорости:
 , (2.5) , (2.5)
где  . .
Тогда, приняв за малую некомпенсируемую постоянную времени контура скорости Т
μс
величину, равную сумме малой постоянной времени контура тока 2Т
У
и постоянной времени фильтра Т
Ф
, т. е.  , получим из (2.5) передаточную функцию регулятора скорости , получим из (2.5) передаточную функцию регулятора скорости
 . (2.6) . (2.6)
Таким образом, при настройке контура скорости на модульный оптимум получаем П-регулятор с коэффициентом передачи k
РС
, определяемым выражением (2.6).
Важнейшим показателем, характеризующим качество системы стабилизации скорости, является статическая точность ее работы, т. е. значение установившейся ошибки при возмущающем воздействии. Рассчитать установившиеся ошибки по управляющему и возмущающему воздействиям можно, используя передаточные функции системы по сигналу ошибки. Однако проще и нагляднее их можно выразить из уравнения равновесия прохождения сигналов в исследуемой структуре. Для нее можно записать (см. рис. 2.3):
 . (2.7) . (2.7)
Уравнение (2.7) записано в приращениях по управляющему DU
З
(s
) и возмущающему DI
с
(s
) воздействиям. Выразить передаточные функции по соответствующему воздействию можно, полагая DI
с
(s
) =
0 или DU
з
(s
) =
0. Далее, устремив s
®0, получить значения установившихся ошибок. Положив DU
з
(s
) = 0, выразим из (2.7) отношение Dω(s
)/
DI
с
(s
) и после подстановки в него выражений для всех входящих передаточных функций и упрощений получим
 , , 
 , ,
и учитывая, что  , получим , получим
 . (2.8) . (2.8)
В установившемся режиме (s
®0) относительный перепад скорости Dω/
Δωс
определяется из (2.8) при s
®0 и выражается
 , ,
где Δωс
- естественный статический перепад скорости от приложенной нагрузки.
Если полученное таким образом значение ошибки не соответствует техническим требованиям, необходимо повысить порядок астатизма в той части системы, которая существует слева от места приложения возмущающего воздействия (см. рис. 2.3). Чаще всего в этом случае переходят к настройке контура скорости на симметричный оптимум (СО), т. е. используют в качестве регулятора скорости ПИ-регулятор. В нашем случае
 . .
При настройке контура скорости на симметричный оптимум в системе наблюдается значительное увеличение динамической ошибки (перерегулирования) по управляющему воздействию, обусловленное наличием в регуляторе скорости форсирующего звена с передаточной функцией W
(s
) =
1+
4(2T
У
+T
Ф
)s
. Для того чтобы переходный процесс соответствовал прежней настройке контура на модульный оптимум, необходимо на входе системы перед задающим воздействием включить звено с передаточной функцией обратной передаточной функции форсирующего звена, то есть
 . . Данное входное звено W
вх
(s
) играет роль задатчика интенсивности. Структурная схема с входным звеном представлена на рис. 2.4.
Порядок выполнения работы
Данные для расчета используются из отчетов по курсу "Элементы и устройства автоматических систем" и лицевой панели данной работы.
1. Ознакомиться с расположением и назначением элементов системы и органов управления на лицевой панели макета.
2. По заданному преподавателем варианту исходных данных рассчитать параметры настроек регулятора тока и регулятора скорости при настройке контуров на МО (параметры рассчитать заранее).
3. Рассчитать значение установившейся ошибки по возмущающему воздействию в процентах к естественному перепаду скорости двигателя при значении тока в якорной цепи 1.5 А.
4. Перед включением тумблера "СЕТЬ" установить потенциометр задающего напряжения U
з
в положение "0" (при этом тумблер К1 должен быть в верхнем положении 2), коэффициент усиления усилителя в положение "10", момент сопротивления - "0", т. е. тумблер включения муфты К2 в положение "ВЫКЛЮЧЕНО".
5. Собрать двухконтурную систему регулирования скорости двигателя с подчиненным токовым контуром. Обратная связь по току реализуется с помощью сопротивления R
Ш
, включенного в якорную цепь двигателя и равного 1 Ом.
6. Установить параметры регуляторов тока и скорости в соответствии с расчетом по п. 2 при заданном значении k
У
, выставить значение k
У
, включить тумблер "СЕТЬ".
7. С помощью задающего потенциометра R
з
установить максимальное значение напряжения на выходе усилителя U
У
= 20 В, соответствующее максимальному значению регулируемой скорости двигателя ωmax
. Рассчитать значение ωmax
и определить ее экспериментально, используя измерительные приборы.
8. Подключить к дополнительным клеммам тахогенератора осциллограф и при ступенчатом изменении задающего напряжения ΔU
з
(тумблером К1) по кривой переходного процесса, наблюдаемого на экране осциллографа, определить время регулирования t
р
и максимальное перерегулирование σmax
% исследуемой двухконтурной системы.
9. При значении U
У
= 20 В включить муфту тумблером К2 и установить потенциометром "МОМЕНТ СОПРОТИВЛЕНИЯ" ток якоря двигателя I
Я
=1.5 А, определив при этом значение установившейся ошибки Δωр
от возмущающего воздействия:  , а U
У
- напряжение на выходе УПТ на холостом ходу двигателя, U
ТГ
с
- напряжение тахогенератора при I
Я
= 1.5 А. Подключив вольтметр к выходу элемента сравнения и измерив ΔU
, определить суммарную ошибку системы регулирования скорости , а U
У
- напряжение на выходе УПТ на холостом ходу двигателя, U
ТГ
с
- напряжение тахогенератора при I
Я
= 1.5 А. Подключив вольтметр к выходу элемента сравнения и измерив ΔU
, определить суммарную ошибку системы регулирования скорости  . Включая и выключая муфту зарисовать переходный процесс ω(t
) и I
Я
(t
) с экрана осциллографа при сбросе и набросе нагрузки. . Включая и выключая муфту зарисовать переходный процесс ω(t
) и I
Я
(t
) с экрана осциллографа при сбросе и набросе нагрузки.
10. С помощью задающего потенциометра R
з
установить минимальное значение напряжения на выходе усилителя U
У
= 5 В, соответствующее минимальному значению регулируемой скорости ωmin
и при заданном значении скорости повторить эксперименты по пп. 8 и 9.
11. Перейти к системе, реализующей настройку контура скорости на СО, рассчитать параметры регулятора скорости для заданного варианта (параметры рассчитать заранее), включить систему без использования входного звена.
12. Повторить эксперимент, аналогичный предыдущему, в соответствии и в последовательности с пп. 7–10.
13. Включить входное звено и полностью повторить эксперимент (пп. 8 и 10).
Оформление отчета
Результаты выполненной работы должны быть представлены в виде отчета, содержащего:
1. Принципиальную схему макета установки.
2. Структурные схемы двухконтурной системы регулирования скорости для различных вариантов реализации согласно пп. 2, 11, 13.
3. Расчеты параметров регуляторов при настройке контуров на МО и СО.
4. Расчет параметров входного звена при настройке контура скорости на СО.
5. Расчет установившихся ошибок по возмущающему воздействию в процентах к естественному перепаду скорости двигателя Δωс
в системе с настройкой контура скорости на МО.
6. Обработку результатов эксперимента по пп. 8–10, 12, 13, т. е. определение t
р
, σmax
%, Δωр
, Δω и сопоставление их с теоретическими, между собой и с результатами, получаемыми в лабораторной работе № 1 исследования одноконтурной системы регулирования скорости (представить в виде сводной таблицы).
7. Анализ влияния входного звена на характер переходных процессов при настройке контура скорости на СО.
8. Сравнительный анализ переходных процессов в контуре тока для всех исследуемых структур.
9. Выводы по работе.
Целью
работы являются:
1. Изучение принципа действия и математического описания системы стабилизации положения магнитного тела.
2. Уточнение математической модели объекта управления и системы в целом.
3. Расчет параметров корректирующих устройств (в том числе машинными методами).
4. Экспериментальное определение статических и динамических характеристик системы регулирования.
Общие указания
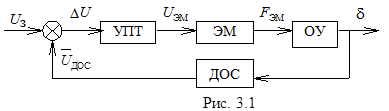 На рис. 3.1 представлена структурная схема системы автоматического регулирования положения ферромагнитного тела (ФМТ), на которой приняты следующие обозначения: ОУ (объект управления) - ФМТ (полый шарик из Ni), подвешиваемое в поле электромагнита (ЭМ) под действием электромагнитной силы (F
ЭМ
) на расстоянии в от ЭМ; ДОС (датчик обратной связи) - датчик положения, дающий информацию о положении ФМТ относительно ЭМ; УПТ - усилитель постоянного тока, питающий обмотку ЭМ (I
ЭМ
). Напряжение U
ЭМ
на выходе усилителя, подаваемое на обмотку ЭМ, изменяется в соответствии с сигналом рассогласования (DU
). Процесс изменения тока в обмотке ЭМ имеет вид На рис. 3.1 представлена структурная схема системы автоматического регулирования положения ферромагнитного тела (ФМТ), на которой приняты следующие обозначения: ОУ (объект управления) - ФМТ (полый шарик из Ni), подвешиваемое в поле электромагнита (ЭМ) под действием электромагнитной силы (F
ЭМ
) на расстоянии в от ЭМ; ДОС (датчик обратной связи) - датчик положения, дающий информацию о положении ФМТ относительно ЭМ; УПТ - усилитель постоянного тока, питающий обмотку ЭМ (I
ЭМ
). Напряжение U
ЭМ
на выходе усилителя, подаваемое на обмотку ЭМ, изменяется в соответствии с сигналом рассогласования (DU
). Процесс изменения тока в обмотке ЭМ имеет вид
 , (3.1) , (3.1)
где r
ЭМ
- сопротивление обмотки, Ом; w
- число витков в обмотке; Ф - магнитный поток, Вб.
Умножая (3.1) на I
ЭМ
dt
, получаем:  . (3.2) . (3.2)
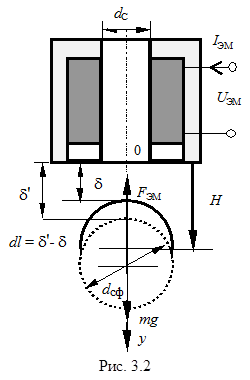 Предположим, что в рассматриваемой системе происходит перемещение подвешиваемого ФМТ вдоль направления, противоположного направлению силы тяжести на dl
(рис. 3.2). При этом магнитная энергия системы W
изменяется на dW
и совершается механическая работа F
ЭМ
dl.
Из закона сохранения энергии следует, что энергия, сообщаемая источником напряжения за время dt
, должна равняться сумме энергии, выделяющейся в виде теплоты в сопротивлении обмотки ЭМ, энергии, затрачиваемой на совершение механической работы, и приращения энергии магнитного поля dW
: Предположим, что в рассматриваемой системе происходит перемещение подвешиваемого ФМТ вдоль направления, противоположного направлению силы тяжести на dl
(рис. 3.2). При этом магнитная энергия системы W
изменяется на dW
и совершается механическая работа F
ЭМ
dl.
Из закона сохранения энергии следует, что энергия, сообщаемая источником напряжения за время dt
, должна равняться сумме энергии, выделяющейся в виде теплоты в сопротивлении обмотки ЭМ, энергии, затрачиваемой на совершение механической работы, и приращения энергии магнитного поля dW
:
 . (3.3) . (3.3)
Из сопоставления (3.2) и (3.3) следует:
 . .
Электромагнитная сила F
ЭМ
может быть выражена через магнитную проводимость G
воздушного зазора:
 , (3.4) , (3.4)
 , (3.5) , (3.5)
 . (3.6) . (3.6)
С учетом (3.4) – (3.6) выражение для электромагнитной силы имеет вид
 . (3.7) . (3.7)
Знак "–" в (3.7) означает, что положительному электромагнитному усилию F
ЭМ
соответствует уменьшение воздушного зазора d. Для вычисления F
ЭМ
по (3.7) необходимо иметь выражение для расчета проводимости воздушного зазора между плоскостью и сферой для электромагнита броневого типа. Согласно [1], магнитную проводимость воздушного зазора под сердечником можно определить по формуле:
 , (3.8) , (3.8)
где  ; R
сф
- радиус сферы, см; r
с
- радиус сердечника, см. ; R
сф
- радиус сферы, см; r
с
- радиус сердечника, см.
Уравнение движения подвешиваемого ФМТ имеет вид:
 , (3.9) , (3.9)
где m
- масса ФМТ, кг; H
- расстояние от ЭМ до центра тяжести ФМТ, см.
Вычисляемая согласно формул (3.7) и (3.8) электромагнитная сила F
ЭМ
(d, I
ЭМ
) представляет нелинейную зависимость, вследствие этого уравнение (3.9) оказывается нелинейным. Однако, учитывая малый диапазон регулирования, можно выделить участок, на котором с допустимой точностью можно принять линейную модель ОУ (ФМТ). Для этого, разлагая правую часть выражения (3.9) в ряд Тейлора и ограничиваясь только первыми членами ряда, получим линеаризованное уравнение движения подвешиваемого ФМТ в отклонениях:
Откуда получаем
 , (3.10) , (3.10)
так как  и и
где 
где d0
- зазор, соответствующий уравновешенному положению ферромагнитного тела;  - значение тока в обмотке ЭМ, соответствующее уравновешенному положению ФМТ. - значение тока в обмотке ЭМ, соответствующее уравновешенному положению ФМТ.
Переходя в (3.10) к изображениям по Лапласу, получаем передаточную функцию:
 . (3.11) . (3.11)
Знак "–" в (3.11) означает, что увеличению тока в обмотке ЭМ соответствует уменьшение воздушного зазора. В соответствии со структурной схемой (рис. 3.1) входной величиной ОУ (ФМТ) является электромагнитная сила (F
ЭМ
), а ПФ ОУ определяется как  . Однако при составлении математического описания движения подвешиваемого тела не удалось выделить F
ЭМ
как координату и получить передаточную функцию ОУ в виде . Однако при составлении математического описания движения подвешиваемого тела не удалось выделить F
ЭМ
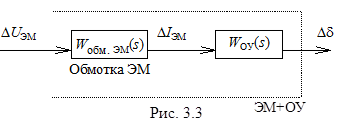
как координату и получить передаточную функцию ОУ в виде  . Поэтому приведенный вывод математической модели ОУ (ФМТ) неразрывно связан с выводом математической модели электромагнита. Изложенное можно проиллюстрировать структурной схемой, приведенной на рис. 3.3. Обмотка ЭМ имеет передаточную функцию инерционного звена 1-го порядка: . Поэтому приведенный вывод математической модели ОУ (ФМТ) неразрывно связан с выводом математической модели электромагнита. Изложенное можно проиллюстрировать структурной схемой, приведенной на рис. 3.3. Обмотка ЭМ имеет передаточную функцию инерционного звена 1-го порядка:
  , (3.12) , (3.12)
где  ; ;  . .
Передаточную функцию (3.11), представляющую собой согласно рис. 3.3 последовательное соединение ЭМ и ОУ, лучше представить в стандартном виде
 (3.13) (3.13)
 . .
Согласно проведенным исследованиям, измерениям и расчетам исходные данные для определения числовых значений параметров передаточных функций (3.12) и (3.13) следующие: m
= 0.0107 кг; R
сф
= 0.016 м; [ = 1.5 А, d0
= 2.2 cм]; [= 1.6 А, d0
= 2.4 cм]; [ = 1.5 А, d0
= 2.2 cм]; [= 1.6 А, d0
= 2.4 cм]; [ = 1.7 А, d0
= 2.6 cм]; [= 1.8 А, d0
= 2.8 cм]; [= 1.9 А; d0
= 2.95 cм]; r
с
= 6 см; L
= 0.185 Гн; r
ЭМ
= 23 Ом. Расчет параметров a
и b
в (3.11) и (3.13) из-за сложности вычислений осуществлялся машинным способом. Результаты расчета приведены для точки равновесия [= 1.7 А, d0
= 2.6 cм]: a
= 39.2; b
= 12.7. Результаты расчетов параметров а
и b
для других точек равновесия не приводятся, так как их значения отличаются не более чем на 3 % от представленных значений параметров. = 1.7 А, d0
= 2.6 cм]; [= 1.8 А, d0
= 2.8 cм]; [= 1.9 А; d0
= 2.95 cм]; r
с
= 6 см; L
= 0.185 Гн; r
ЭМ
= 23 Ом. Расчет параметров a
и b
в (3.11) и (3.13) из-за сложности вычислений осуществлялся машинным способом. Результаты расчета приведены для точки равновесия [= 1.7 А, d0
= 2.6 cм]: a
= 39.2; b
= 12.7. Результаты расчетов параметров а
и b
для других точек равновесия не приводятся, так как их значения отличаются не более чем на 3 % от представленных значений параметров.
Для расчета системы регулирования положения ФМТ согласно рис. 3.1 необходимо определить вид передаточных функций УПТ и ДОС, а также значения их параметров. При проведении лабораторных занятий на этом же макете по курсу "Элементы и устройства систем управления" указанные элементы являются объектом исследования, в результате проведения которого необходимо получить статические и динамические характеристики УПТ и ДОС, используемые в дальнейшем при выполнении работ по данному курсу. Передаточные функции УПТ и ДОС имеют следующий вид:
 , ,  . .
Таким образом, структурная схема системы регулирования, подлежащая исследованию и расчету, представлена на рис. 3.4. В представленной структурной схеме на входе и выходе каждого звена указаны отклонения соответствующих переменных от установившихся значений. Приращение регулируемой величины системы Dd обусловлено переходным процессом, вызванным изменениями задающего воздействия на величину DU
з
. Коэффициент передачи датчика ДОС взят со знаком
"–", так как статическая характеристика ДОС, исходя из которой определялся k
ДОС
, δ показывает, что уменьшение воздушного зазора ведет к увеличению выходного напряжения, снимаемого с ДОС. Поскольку рассматриваемая система имеет в своем составе неминимально-фазовое звено, то согласно частотному критерию устойчивости Найквиста при K
= k
У
k
обм
. ЭМ
k
ОУ
k
ДОС
>
1 данная система будет неустойчива и для обеспечения ее работоспособности требуется применение корректирующих устройств. Детальный анализ данной системы регулирования показал, что для ее стабилизации единственно приемлемым решением является использование последовательных корректирующих устройств. Для реализации системы регулирования положения ФМТ необходимо рассчитать корректирующие цепи двух типов:
1) дифференцирующую пассивную RC-цепь (Д-RC-цепь);
2) интегро-дифференцирующую пассивную RC-цепь (ИД-RC-цепь), при заданном значении коэффициента передачи УПТ в соответствии с вариантом: 1) k
У
=
50; 2) k
У
=
60; 3) k
У
=
80; 4) k
У
=
90; 5) k
У
= 100.
Структурная схема системы регулирования с последовательной коррекцией (ПК) представлена на рис. 3.5. Здесь же показано наличие возмущающего воздействия f
, реализуемого в системе с помощью вентилятора, сдувающего при его включении ФМТ. Порядок выполнения работы
1. Ознакомиться с общими указаниями к выполнению данной лабораторной работы, изучив принцип действия лабораторного макета.
2. Получить математическую модель системы регулирования на основе общих указаний и выполнения лабораторной работы по исследованию элементов заданной установки.
3. Рассчитать параметры двух типов последовательной коррекции Д-RC-цепи и ИД-RC-цепи при заданном значении k
У
. Расчет необходимо провести заранее вручную или с использованием ЭВМ.
4. Ознакомиться с расположением и назначением элементов системы и органов управления на лицевой панели макета.
5. Собрать схему регулирования положения ФМТ с последовательной коррекцией 1-го типа (Д-RC-цепью) и установить ее параметры, полученные в результате расчета.
6. Перед включением тумблера "СЕТЬ" установить заданное значение коэффициента усиления УПТ, положить шарик (ФМТ) на подставку установки, регулятор управляющего напряжения поставить в положение "0", тумблеры "СКАЧОК" и "ВОЗМУЩЕНИЕ" в положение "ВЫКЛ.".
7. Включить тумблер "СЕТЬ". Плавно увеличивая управляющее напряжение, наблюдать подъем и зависание ФМТ, установив ток ЭМ на уровне 1.7 А.
8. Подключить осциллограф на выход системы к клемме y
(y
= Δδ) и вольтметр к клемме ε (ε = ΔU
). Включить и настроить осциллограф.
9. При ступенчатом изменении задающего напряжения тумблером "СКАЧОК" зарисовать с экрана осциллографа кривые переходного процесса y
(t
) и определить по ним максимальное перерегулирование, время регулирования и значение установившейся ошибки по показаниям измерительного прибора, подключенного к выходу элемента сравнения.
10. Включить тумблер "ВОЗМУЩЕНИЕ", наблюдать процесс изменения y
(t
) и ε(t
) на экране осциллографа.
11. Уменьшить заданный k
У
на 10…20 % по отношению к заданному значению и повторить пп. 9 и 10.
12. Собрать схему регулирования положения ФМТ с последовательной коррекцией 2-го типа (ИД-RC-цепью) и установить ее параметры, полученные в результате расчета.
13. Повторить пп. 6–11.
Оформление отчета
Результаты выполненной работы должны быть представлены в виде отчета, содержащего:
1. Принципиальную схему макета установки.
2. Структурную схему системы регулирования положения ФМТ.
3. Математическую модель отдельных элементов структуры и системы в целом.
4. Расчет параметров корректирующих цепей двух типов.
5. Результаты экспериментального исследования системы в соответствии с пп. 9–11, по которым согласно п. 9 должны быть определены показатели качества системы регулирования.
6. Расчет установившихся ошибок для системы регулирования Д-RC-цепью при двух значениях k
У
по формуле
 , ,
где  (см. ПК). И для случая использования ИД-RC-цепи также при двух значениях k
У
по формуле (см. ПК). И для случая использования ИД-RC-цепи также при двух значениях k
У
по формуле
 . .
7.
Результаты моделирования системы регулирования на ЭВМ.
8. Сравнение экспериментальных, расчетных данных и результатов моделирования по всем однотипным вариантам.
9. Определение лучшего варианта из всех исследованных и рассчитанных.
10. Выводы по работе.
Целью
работы являются:
1. Изучение возможных принципов построения системы управления положением механического объекта.
2. Исследование одноконтурной системы регулирования углового положения платформы, расчет и реализация возможных вариантов корректирующих устройств.
3. Определение качественных показателей работы одноконтурной системы регулирования углового положения платформы для различных вариантов структурной организации.
4. Изучение принципов построения системы подчиненного (многоконтурного) регулирования положения платформы.
5. Ознакомление с принципами расчета регуляторов отдельных контуров системы подчиненного регулирования.
6. Аналитический расчет и экспериментальное определение статических и динамических характеристик системы подчиненного регулирования положения механического объекта.
Общие указания
Описание поворотной платформы как механического объекта управления подробно рассматривается в лабораторной работе № 4 [2]. Возможны различные способы реализации замкнутой системы регулирования углового положения платформы. В качестве одного из них предложена одноконтурная система управления, структурная схема которой изображена на рис. 4.1.
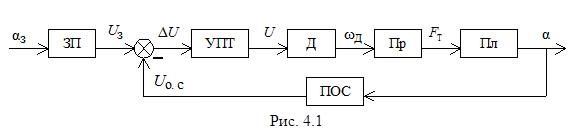
Рассмотрим элементы структурной схемы и их математическое описание. В соответствии с исследованием ОУ (поворотной платформы (Пл)), проведенном в работе № 4 [2], передаточная функция его линеаризованной модели представляется в виде колебательного звена
 , ,
где параметры k
ОУ
, Т
ОУ
и ζ меняются в зависимости от углового положения платформы и положения противовеса.
При расчете системы регулирования рекомендуется принять усредненные значения указанных параметров, полученные в ходе исследования ОУ.
В качестве исполнительного двигателя в данной работе используется типовой для данной лаборатории электродвигатель постоянного тока типа Д-25-Г. Передаточная функция двигателя имеет вид
 , ,
где  рад/(В·с); Т
ЭМ
= 0.16 с; Т
Я
= 2.7·10–3
с. рад/(В·с); Т
ЭМ
= 0.16 с; Т
Я
= 2.7·10–3
с.
В работе используется трехкаскадный усилитель постоянного тока, обеспечивающий линейность характеристики в пределах ±27 В при максимальном токе нагрузки I
= 2 А, имеющий передаточную функцию
 , ,
где k
У
= 10…70; Т
У
= 1.4 · 10–3
с.
Пропеллер имеет сложную нелинейную характеристику, однако, как отмечалось в работе № 4 [2], в линеаризованном варианте передаточная функция пропеллера принимается в виде безынерционного звена
 , ,
где коэффициент передачи пропеллера был определен путем аппроксимации его экспериментальных характеристик k
п
= 0.000765 Н · с/рад.
Потенциометрический датчик (ПОС) для измерения углового положения платформы зафиксирован на оси, вокруг которого вращается платформа, и имеет следующие характеристики: тип датчика - ПТП 5К1, сопротивление 10 кОм, рабочий диапазон α = 330°, напряжение питания датчика U
п
= 93 В.
Передаточная функция датчика
 , ,
где  . .
Результаты анализа поведения системы регулирования углового положения платформы (в том числе в ходе выполнения данной лабораторной работы) показывают, что система неустойчива уже при коэффициенте передачи усилителя k
У
= 15. Таким образом, возникает задача обеспечения устойчивости и хороших статических и динамических показателей качества системы регулирования, решение которой может быть достигнуто использованием различных средств. В данной лабораторной работе рассматриваются два варианта реализации системы регулирования углового положения платформы.
Вариант 1.
Одноконтурная система регулирования с последовательной интегро-дифференцирующей RC-цепью (ПКЦ).
Достоинства и недостатки данного метода коррекции общеизвестны. Главным достоинством ПКЦ является простота расчета и реализации. Однако, учитывая нелинейный характер ОУ, представленного колебательным звеном, параметры которого принимаются усредненными и постоянными, а в реальности, как уже отмечалось, меняются, использование ПКЦ не обеспечивает высоких качественных показателей работы системы в статике и динамике во всем диапазоне регулирования положения платформы.
Обычно ПКЦ включается на вход усилителя. Задача лабораторной работы по данному варианту состоит в расчете параметров ПКЦ, экспериментальном определении статических и динамических показателей качества работы системы регулирования и сравнение их с расчетными.
Вариант 2.
Трехконтурная система подчиненного регулирования углового положения поворотной платформы.
Основные принципы построения систем подчиненного регулирования изложены в лабораторной работе № 2 настоящего пособия, там же отмечены достоинства такой организации работы систем и даны идеи их расчета. В данной лабораторной работе исследуется трехконтурная система подчиненного регулирования, структурная схема которой представлена на рис. 4.2. На схеме используются следующие обозначения: УПТ - усилитель постоянного тока; Д1 - Д2 - Д3 - двигатель; Пр - пропеллер; Пл - платформа; ДТ - датчик тока; ДЭ - датчик ЭДС; ДП - датчик положения; РТ - регулятор тока; РЭ - регулятор ЭДС; РП - регулятор положения.
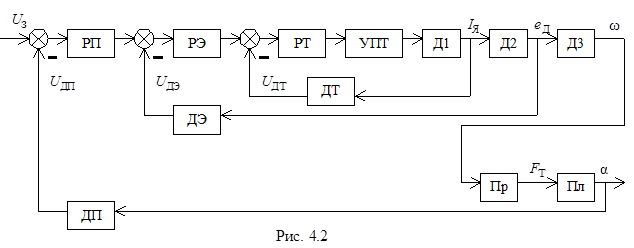
Двигатель, имеющий передаточную функцию W
Д
(s
), в данном случае представлен в виде трех последовательно соединенных звеньев с передаточными функциями W
Д1
(s
), W
Д2
(s
) и W
Д3
(s
), что необходимо для выделения промежуточных координат. На выходе передаточной функции W
Д1
(s
) получим ток якоря, на выходе передаточной функции W
Д2
(s
) имеем значение ЭДС двигателя и, наконец, на выходе W
Д3
(s
) имеем значение скорости вращения вала двигателя.
Выбор в качестве промежуточной координаты значения ЭДС, а не скорости, объясняется конструкцией макета, в котором нет тахогенератора, установка которого повлекла бы кардинальные изменения конструкции.
Согласно общим указаниям к работе № 2 имеем
 , ,
где R
Я
= R
ЯД
+ R
Ш
- полное сопротивление якорной цепи; R
Ш
= 1 Ом - добавочное сопротивление в якорной цепи для реализации обратной связи по току.
В соответствии с изложенным ранее принципом расчета контуров на модульный оптимум (см. также работу № 2) нетрудно последовательно, начиная с внутреннего контура, рассчитать регуляторы тока, ЭДС и положения.
Некомпенсируемой частью контура тока является усилитель, имеющий малую постоянную времени Т
У
. Таким образом, некомпенсируемая малая постоянная времени контура тока Т
μ
будет равна Т
У
, Т
μ
= Т
У
. Передаточная функция разомкнутого контура тока  . Тогда передаточная функция регулятора тока будет иметь вид . Тогда передаточная функция регулятора тока будет иметь вид
 , (4.1) , (4.1)
где  - коэффициент передачи регулятора тока. - коэффициент передачи регулятора тока.
Выразим передаточную функцию замкнутого контура тока
 . (4.2) . (4.2)
Учитывая передаточную функцию датчика ЭДС  , где k
э
= 0.44, можно рассчитать регулятор ЭДС. , где k
э
= 0.44, можно рассчитать регулятор ЭДС.
Для этого контура некомпенсируемой малой постоянной является сумма малых постоянных замкнутого контура тока 2Т
У
и датчика ЭДС, равная якорной постоянной двигателя Т
Я
, т. е.  . .
При настройке на модульный оптимум передаточная функция разомкнутого контура ЭДС
 . (4.3) . (4.3)
С другой стороны (см. рис. 4.2),
 . (4.4) . (4.4)
Тогда, учитывая (4.2) и (4.3), выразим из (4.4) передаточную функцию регулятора ЭДС:
Учитывая, что  , передаточная функция регулятора ЭДС будет иметь вид , передаточная функция регулятора ЭДС будет иметь вид
 , (4.5) , (4.5)
где  - коэффициент передачи регулятора ЭДС. - коэффициент передачи регулятора ЭДС.
Передаточная функция замкнутого контура ЭДС  . .
Таким образом, малая постоянная времени контура положения есть  , и тогда передаточная функция разомкнутого контура положения , и тогда передаточная функция разомкнутого контура положения
 . .
Из структуры (рис. 4.2) видно, что
 . (4.6) . (4.6)
Из (4.6) выразим W
РП
(s
)
 . (4.7) . (4.7)
После подстановки в (4.7) значений всех передаточных функций получим передаточную функцию регулятора положения
 , (4.8) , (4.8)
где  - коэффициент передачи регулятора положения. - коэффициент передачи регулятора положения.
Анализ выражений передаточных функций регуляторов тока (4.1), ЭДС (4.5) и положения (4.8) показывает, что настройка регулятора тока зависит от задаваемого коэффициента передачи усилителя k
У
, настройка регулятора ЭДС не зависит от k
У
и параметров ОУ, а настройка регулятора положения определяется параметрами объекта и коэффициентом передачи пропеллера k
п
. Учитывая, что вблизи горизонтального положения платформы (α0
= 90°) коэффициент передачи пропеллера k
п
меняется незначительно, рекомендуется применять усредненное постоянное значение k
п
, полученное в ходе исследования механического объекта [2].
Таким образом, для реализации трехконтурной системы регулирования и последующего ее исследования необходимо рассчитать и настроить регуляторы контуров в соответствии с заданием, в котором указывается значение коэффициента передачи усилителя k
У
и рабочая точка α = α0
, для которой ранее были получены параметры ОУ: k
ОУ
, T
ОУ
и ζ.
В соответствии со схемами регуляторов, представленных на лицевой панели макета, и выражениями передаточных функций (4.1) и (4.8) расчет настраиваемых параметров производится следующим образом. Для регулятора тока (4.1) имеем

откуда при известном значении R
т
.
о. с
, указанном на лицевой панели, определяем R
т
, соответствующее заданному k
У
:
 [кОм]. [кОм].
Поскольку постоянная времени регулятора, равная Т
Я
, не изменяется, значения сопротивления  и емкости С
т
выбраны в соответствии с и емкости С
т
выбраны в соответствии с  с. с.
Для регулятора положения (4.8) имеем  , ,
где  - при принятых допущениях величина постоянная. - при принятых допущениях величина постоянная.
В соответствии со схемой регулятора положения имеем  , откуда , откуда  . .
Значения R
1
и R
2
определяются следующими соотношениями:
 . .
Значение сопротивления R
4
выбрано в соответствии с выражением  . .
Порядок выполнения работы
1. Ознакомиться с установкой, расположением и назначением элементов и органов управления.
2. Рассчитать предложенный вариант или варианты, заданные преподавателем. Задаются структура системы регулирования (вариант 1 или 2), коэффициент усиления УПТ k
У
, рабочая точка α0
, положение противовеса, как правило, тех же значений, которые были использованы при исследовании ОУ и вычислении параметров его передаточной функции.
3. Перед началом выполнения лабораторной работы убедиться, что органы управления находятся в следующих положениях: тумблер "СЕТЬ" - в положении "ВЫКЛЮЧЕНО"; кнопки "СКАЧОК 1", "СКАЧОК 2" и "ВОЗМУЩЕНИЕ" - в отжатом состоянии; кнопки "ОС" и "АНАЛОГОВОЕ УПРАВЛЕНИЕ" - в нажатом состоянии.
4. Собрать рассчитанную систему, установить необходимые параметры в соответствии с заданием и расчетом (параметры ПКЦ либо параметры регуляторов тока и положения в трехконтурном варианте). Включить тумблер "СЕТЬ".
5. Нажать кнопку "СКАЧОК 1", вызывающую ступенчатое изменение напряжения U
з
. С помощью задающего потенциометра установить значение напряжения U
з
, при котором платформа будет находиться в заданной рабочей точке (α = α0
). Отжать кнопку "СКАЧОК 1", зафиксировав начальное положение платформы.
6. Нажать кнопку "СКАЧОК 1". Определить время регулирования t
р
и максимальное перерегулирование σmax
%, измерить значение сигнала ошибки ΔU
. Отжать кнопку "СКАЧОК 1".
7. Нажать кнопку "СКАЧОК 2" и с помощью задающего потенциометра вывести платформу в заданное рабочее положение. Отжать кнопку "СКАЧОК 2", платформа опустится в начальное положение.
8. Нажать кнопку "СКАЧОК 2" и, наблюдая процесс перемещения платформы в заданное положение, определить время разгона, перерегулирование и количество колебаний.
9. Нажать кнопку "ВОЗМУЩЕНИЕ". Зафиксировать максимальное отклонение платформы от установившегося положения, обусловленное вращением диска с противовесом, измерить также максимальное значение сигнала ошибки ΔU
. Изменяя скорость вращения противовеса, наблюдать изменение частоты колебаний платформы.
10. В момент, когда груз будет находиться в положении, противоположном первоначально заданному, остановить его движение, отжав кнопку "ВОЗМУЩЕНИЕ". Измерить угол положения платформы и сравнить его с заданным α0
.
11. При данном положении противовеса повторить пп. 5–8.
12. При установленных настройках (п. 4) рассчитанных параметров системы изменить положение платформы на ±5º и повторить пп. 5–9, выяснив влияние изменения параметров объекта на качество системы регулирования и управления.
13. Изменив k
У
на 10…15 % от заданного значения, повторить пп. 5–9. Сравнить полученные результаты по качеству управления и регулирования.
Оформление отчета
Результаты выполненной работы должны быть представлены в виде отчета, содержащего:
1. Принципиальную схему макета установки.
2. Структурную схему системы регулирования.
3. Краткое описание системы регулирования.
4. Расчет параметров корректирующих устройств реализованной системы регулирования углового положения платформы.
5. Результаты исследования системы по всем пунктам ее выполнения: лучше, если они будут представлены в виде сводной таблицы.
6. Анализ полученных результатов.
7. Выводы по работе.
1. Иванов В. И., Желтов В. П. К расчету электромагнита в магнитном подвесе сферы //Тр. МАИ. 1974. Вып. 305. С. 72–79.
2. Методические указания к лабораторным работам по дисциплине "Элементы и устройства автоматических систем"/ Сост.: С. Н. Гайдучок, Н. В. Соловьев; ГЭТУ. СПб., 1999. 32 с.
Содержание
Лабораторная работа № 1
Система регулирования скорости вращения двигателя постоянного тока
независимого возбуждения.................................................................................................. 3
Лабораторная работа № 2
Система регулирования скорости вращения двигателя постоянного тока
с подчиненным токовым контуром.....................................................................................
9
Лабораторная работа № 3
Электромеханическая система стабилизации положения магнитного тела........... 17
Лабораторная работа № 4
Система стабилизации углового положения платформы ("Вертолет")...................
24
Список литературы.............................................................................................................. 31
Редактор И. Г. Скачек
ЛР № 020617 от 24.06.98
______________________________________________________________________
Подписано в печать Формат 60х84 1/16. Бумага тип. № 2 .
Печать офсетная. Усл. печ. л. 1,86. Уч.-изд. л. 2,0.
Тираж 125 экз. Заказ
______________________________________________________________________
Издательство СПбГЭТУ "ЛЭТИ"
197376, С.-Петербург, ул. Проф. Попова, 5
|