Учебное пособие: Методические указания по выполнению лабораторных работ по курсам
|
Название: Методические указания по выполнению лабораторных работ по курсам Раздел: Остальные рефераты Тип: учебное пособие 
| ||||||||||||||||||||||||||||
| МИНИСТЕРСТВО НАУКИ И ОБРАЗОВАНИЯ РОССИЙСКОЙ ФЕДЕРАЦИИ МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ИНСТИТУТ РАДИОТЕХНИКИ, ЭЛЕКТРОНИКИ И АВТОМАТИКИ (ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ) Методические указания по выполнению лабораторных работ по курсам «Информационные устройства и системы в робототехнике» и «Информационные устройства и системы в мехатронике» Для студентов специальностей 21.03.00 и 07.18.00 Москва 2005 Составители: В.З. Рахманкулов, В.В. Герасимов, О.А. Новиков Редактор Штыков А.В. Методические указания посвящены изучению методов, алгоритмов и программ, предназначенных для обработки и распознавания изображений в системах технического зрения. Материал предназначен для студентов дневного, вечернего и заочного отделений, обучающимся по специальностям 21.03.00 и 07.18.00. Печатаются по решению редакционно-издательского совета Московского Государственного института радиотехники электроники и автоматики (технического университета). Рецензенты: О. И. Артюхов, А. М. Романов © Московский государственный институт радиотехники электроники и автоматики (технический университет), 2005. ВВЕДЕНИЕ Рабочими программами дисциплин «Информационные устройства и системы в робототехнике» и «Информационные устройства и системы в мехатронике» для студентов специальностей 21.03.00 и 07.18.00, обучающимся по направлению 65.20.00 «Мехатроника и робототехника», предусмотрено выполнение лабораторных работ. Данные методические указания посвящены изучению алгоритмов и программ, предназначенных для обработки и распознавания изображений в системах технического зрения. Представлены методические указания по выполнению 4-х лабораторных работ. Первая лабораторная работа посвящена ознакомлению с методами фильтрации изображений и выбору фильтров в зависимости от конкретного изображения. Вторая лабораторная работа посвящена ознакомлению с некоторыми существующими методами оконтуривания изображений и исследованию целесообразности выбора методов оконтуривания в зависимости от конкретного изображения. Целью следующей лабораторная работы является ознакомление с одним из методов поиска признаков изображения объекта, представленного в форме многоугольника. Целью последней лабораторной работы является изучение предложенного авторами метода распознавания объектов, которые можно аппроксимировать многоугольниками. ЛАБОРАТОРНАЯ РАБОТА №1 Фильтрация изображений Цель работы : ознакомление с программой «Фильтрация изображений»; ознакомление с некоторыми существующими методами фильтрации изображений; исследование целесообразности выбора фильтров в зависимости от конкретного изображения. Время выполнения работы : 4 учебных часа. Теоретическая часть Системы технического зрения относятся к числу самых мощных средств повышения функциональной гибкости роботизированного производства. С помощью СТЗ робот способен получить наиболее полную информацию о форме и окраске объектов, их количестве, местоположении и других свойствах. Благодаря СТЗ роботы стали применяться в таких операциях, как контроль качества готовой продукции, учет и измерение. Несмотря на продолжающийся рост количества разнообразных применений систем технического зрения, в основе функционирования каждой отдельной системы лежит относительно небольшой набор типичных средств и методов. В частности, в каждую систему неотъемлемой частью предварительной обработки изображения входит фильтрация . Необходимость фильтрации вызвана не всегда удовлетворительным для обработки качеством изображения. Если на вход системы распознавания будет подано изображение, содержащее помехи (шумы ), то распознавание может быть существенно затруднено, а при большом количестве помех невозможно. За шум на изображении может приниматься его минимальный элемент (пиксел), цветовые характеристики которого значительно отличаются от характеристик соседних с ним элементов. Такие шумовые пикселы бывают единичными, но также могут объединяться в группы, образуя шумовые области в виде пятен, полос и т.д. Под фильтрацией изображения понимают процесс вычисления цветовых характеристик пиксела или группы пикселов (области) согласно известному закону. После их нахождения цвета текущего пиксела заменяются на вновь вычисленные. Для более качественной фильтрации целесообразно перейти от цветного к полутоновому изображению. Следует отметить, что реальные условия съемок не дают идеального качества получаемых изображений. Оно зависит от многих параметров, таких как: освещенность, состояние поверхности зоны съемок и самих объектов съемок, качества аппаратуры. Из практики известно, что изображения даже с цифровой аппаратуры требуют предварительной фильтрации. Из-за разнообразия условий съемки, а следовательно, из-за большого различия в качестве получаемых изображений невозможно применять единый закон фильтрации для всех случаев. На практике для конкретного изображения применяют специально подобранный для его обработки фильтр или группу фильтров. Усредняющие фильтрыНа практике большое значение получили усредняющие фильтры. В простейшем варианте яркость каждого пиксела обрабатываемого изображения устанавливается равной среднему значению яркостей окружающих его пикселов. Такой подход приводит к размыванию контраста. Принцип действия одномерного усредняющего фильтра поясняется на рисунке 1.
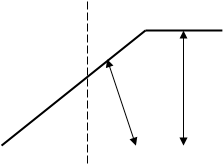
Рис.1 На графике по горизонтали отложены координаты точек, а по вертикали –их яркости. В результате получается профиль строки. На левом графике изображен профиль до фильтрации, на правом – после.Улучшенный вариант алгоритма усреднения заключается в том, что значение пиксела изменяется на среднее только при условии, что оно отличается от него более чем на величину порога Ψ. См. пример на рис. 2.
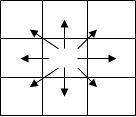
Рис.2 , где i – количество пикселов в окне, яркости которых учитываются для определения яркости центрального пиксела; А – яркость каждого пиксела, значение которой учитывается для определения яркости центрального пиксела; X – центральный пиксел окна.Как видно из формулы, для определения яркости элемента X используются значения яркостей 8 окружающих его элементов. Такой фильтр называется восьмисвязанным (см. рис 3).
Рис.3 Также может использоваться фильтр, значение яркости среднего элемента которого зависит от яркостей 4 окружающих его элементов. Этот фильтр носит название четырехсвязанного . На рис.4 изображен принцип четырехсвязанности.
Рис.4 Медианная фильтрация Подавление изолированных помех с минимальным размыванием контраста обеспечивается за счет двухмерной медианной фильтрации. Это нелинейный метод обработки изображений, позволяющий убрать резкие выбросы. Одномерный медианный фильтр представляет собой скользящую строку, охватывающуе нечетное число элементов изображения. Центральный элемент заменяется медианой всех элементов изображения в окне. Медианой последовательности a 1 , a 2 ,…, aN для нечетного N является тот ее элемент, для которого существуют (N -1)/2 меньших или равных ему по величине и (N -1)/2 больших или равных. Например, если в окно размером 5 попали элементы 1,1,7,3,4, то центральный элемент (7) необходимо заменить на медиану 3. Принцип действия одномерного медианного фильтра поясняется на рис 5.
Рис.5 По горизонтали отложена координата точки, по вертикали – значение её яркости. Получается двумерный профиль. Для фильтруемой точки берутся значения ее соседей и заносятся в таблицу. Затем находят медиану. Значение яркости текущего пиксела меняется на значение медианы. Таким образом, если в точке был выброс, то она не попадает в отфильтрованное изображение. Ступеньки же остаются без изменения. Если сравнить усреднение и медианную фильтрацию, то легко заметить различия в конечных результатах. Двумерный медианный фильтр, который представляет собой окно, обладает большим размывающим действием, чем одномерный. Нежелательное размывание контраста можно частично преодолеть, подбирая форму окна. Известно, что фильтр с квадратным окном приводит к разрушению углов изображения. Крестообразный фильтр не имеет таких негативных проявлений. Интерфейс программы Интерфейс программы выполнен в виде окна с соответствующими информативными полями и вкладками задания и изменения режимов. При начале работы пользователь должен открыть окно выбора необходимого изображения. Для того, чтобы открыть изображение, необходимо выбрать вкладку File \ Open. При этом откроется диалоговое окно, в котором можно выбрать требуемое изображение. В окне есть возможность предпросмотра изображения. Среди набора изображений есть 2 вида графических файлов. Файлы, в название которых входит слово «etalon » содержат эталонные изображения объектов. Остальные файлы содержат искаженные образы объектов, которые необходимо, отфильтровать, оконтурить, вычислить признаки объекта и распознать, сравнивая с эталонами. Сначала пользователь должен выбрать изображение, которое не является эталоном. Задание1. Запустить файл программы Lab 1 filter . exe . 2. Используя меню Fail / Open выбрать файл с изображением формата BMP. 3. Переходим от цветного изображения к полутоновому, активизируя опцию Серый . 4. Во вкладке Фильтры выбрать необходимый фильтр. Фильтрация будет проведена автоматически. При желании отфильтрованный файл можно сохранить на диск, используя меню Fail / Сохранить . 5. Каждый файл с изображением обработать всеми возможными фильтрами. При этом необходимо сравнить результаты и сделать вывод об эффективности, достоинствах и недостатках каждого метода фильтрации. Для того чтобы привести изображение к исходному виду без повторного его открытия через меню Fail / Open , необходимо нажать кнопку меню Обновить . Содержание отчёта1. Название работы. 2. Цель работы. 3. Задание. 4. В отчете следует отразить эффективность действия каждого фильтра на каждое изображение, а также выписать фильтры, которые позволяют лучше всего подавить помеху для соответствующего изображения. Контрольные вопросы1. Поясните особенности усредняющей фильтрации. 2. Что такое медианный фильтр? 3. Объясните методику проведения машинных экспериментов. Примечание. Типы используемых фильтровФильтры 1 и 2 - усредняющие 4-связные соответственно без учета и с учётом центрального пиксела. Фильтры 3 и 4 - усредняющие 8-связные соответственно без учета и с учётом центрального пиксела. Фильтр 5 - усредняющий 8-связный с порогом фильтрации без учета центрального пиксела. Фильтры 6 и 7 – медианные соответственно 8- и 4-связные с учетом центрального пиксела. Фильтр 8- медианный фильтр в виде креста 5*5 с учетом центрального пиксела. ЛАБОРАТОРНАЯ РАБОТА № 2 Оконтуривание изображений Цель работы : ознакомление с некоторыми существующими методами выделения границ и оконтуривания изображений; исследование целесообразности выбора методов оконтуривания в зависимости от конкретного изображения. Время выполнения работы: 4 учебных часа. Теоретическая часть Перепады яркости на изображении, как правило, заключают в себе важнейшую информацию о наблюдаемой сцене. Именно с их помощью выполняется разделение объектов друг от друга, а также обнаружение различных элементов одного объекта – ребер, граней, отверстий и т.п. Для более быстрого процесса обработки цветное изображение переводят в полутоновое. При этом качество обработки изображения в некоторых случаях может улучшаться. Перепады яркости обычно отделяют друг от друга две области изображения с различной яркостью. Схематичное изображение одномерного перепада представлено на рис. 1.
Q h
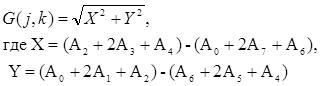
x 0 Рис.1 Одномерный перепад характеризуется высотой h, крутизной склона Q и координатой центра x 0 . Идеальный детектор перепада должен указывать наличие перепадов в единственной точке, расположенной строго в центре склона. Исходное изображение (массив F(j,k)) подвергается обработке, направленной на усиление перепадов яркости, т.е. контрастированию. В результате формируется массив G(j,k). Контрастное изображение за счет порогового ограничения преобразуется в бинарное изображение E(j,k), каждый единичный пиксел которого соответствует точке перепада яркости. Выбор порога оказывает существенное влияние на качество алгоритмов выделения перепада. При высоком уровне порога могут быть потеряны малоконтрастные элементы контура изображения, при низком, наоборот, появятся перепады, которые приведут к ложным контурам. Широкое распространение получили методы контрастирования, использующие нелинейные комбинации значений яркости элементов изображения. В ряду наиболее известных нелинейных операторов находятся операторы Робертса и Собеля. Оператор Робертса GR использует окно 2*2. Дифференцирование по Робертсу выполняется согласно формуле: Оператор Собеля использует окно 3*3, элементы которого показаны на рис.2
Рис.2 Вычисления проводятся по формуле:
В данном лабораторном комплексе реализован алгоритм оконтуривания изображения, работающий по следующей схеме: если после контрастирования разность значений яркости элементов А7 и А3 или А1 и А5 рисунка 3 превышает заданный порог S , то значение центрального пиксела устанавливается черным, иначе - белым. На практике, границы объектов на изображении довольно размыты для того, чтобы качественно провести оконтуривания. Для повышения качества оконтуривания можно уменьшить масштаб изображения. В данной лабораторном комплексе он уменьшается в 2 раза. Этим достигается то, что на переход от одной области к другой затрачивается в 2 раза меньше пикселов, следовательно граница объекта получается более четкой и качественной. Плюс к этому уменьшается в 2 раза время оконтуривания. В данном практикуме уменьшение масштаба выполняется двумя способами. В первом случае каждый второй пиксел исходного изображения попросту не принимается во внимание, то есть пропускается. Во втором случае один пиксел уменьшенного изображение является результатом усреднения по яркости четырех соседних друг с другом пикселов исходного изображения. Задание1. Запустить файл программы Labfilter 1. exe . 2. Используя меню Fail / Open выбрать файл с отфильтрованным изображением. 3. Используя вкладку Контраст, провести выделение контура изображения. С помощью вкладки Масштаб уменьшить масштаб изображения двумя представленными способами. Содержание отчета 1. Название работы. 2. Цель работы. 3. Задание. 4. Контуры изображений, полученные различными способами, и соответствующие им отфильтрованные изображения. Контрольные вопросы1. Что такое нелинейный оператор Робертса? 2. Пояснить суть оператора Собеля. 3. Что дает изменение масштаба изображения? ЛАБОРАТОРНАЯ РАБОТА № 3 Нахождение признаков изображения объекта Цель работы : ознакомление с одним из методов поиска признаков изображения объекта, заданного в форме многоугольника. Время выполнения работы :4 учебных часа. Теоретическая часть В предыдущих лабораторных работах Вы познакомились с такими предварительными этапами обработки изображения, как фильтрация и оконтуривание. В данной лабораторной работе переходим к одному из основных этапов обработки изображений – выделение характреристических признаков объекта. За характеристические признаки объекта обычно принимают величины углов фигуры и длины их сторон (для многогранников) и значения радиуса для дуг окружностей. Для деталей сложной формы, имеющих технологические отверстия, характерными признаками также являются расстояния от центра отверстий до некоторых углов детали. Вообще, могут учитываться такие параметры объектов, как периметр и площадь. Существуют несколько различных методов поиска характеристических признаков объекта. В данной работе в качестве признаков изображения объекта, заданного в форме многоугольника, используются его углы и стороны. Для поиска углов используется метод «пересекающихся прямых». В основу данного метода положен контроль изменения угла между двумя смежными линиями, движущимися по контуру фигуры. На рис.1 приведена иллюстрация этой идеи.
Рис.1 Две линии соединены между собой в центральной точке CenterPos и движутся по контуру фигуры, причем все три точки 1, CenterPos и 2 всегда лежат на контуре фигуры. Отрезки должны двигаться по часовой стрелке по контуру. Поэтому возникла задача обеспечения движения всех трех точек 1, CenterPos и 2 одновременно в одну сторону. Это значит, что перед началом движения отрезков необходимо найти на контуре пикселы, смежные с точками 1, CenterPos и 2, движение по которым приведет к разнонаправленному перемещению линий (назовем их «запрещенными»), и запретить движение отрезков по ним. Этим самым обеспечивается однонаправленность движения отрезков. В процессе движения по контуру на каждом шаге ведется просчет угла А между двумя отрезками. При этом наблюдается закономерность: при приближении отрезков к углу фигуры угол между отрезками начинает уменьшаться, а после прохода угла фигуры – увеличивается. На прямых сторонах фигуры угол A остается относительно стабильным и приближается к 180 градусам. Таким образом, по изменению угла А можно зафиксировать наличие угла на контуре. Угол будет зафиксирован, когда значение А будет иметь минимальное значение. Угол A вычисляется по формуле:
где: X1, Y1 – координаты конца отрезка 1 по осям x и y соответственно; X2, Y2 – координаты конца отрезка 2 по осям x и y соответственно; CenterPosX, CenterPosY – координаты точки CenterPos по осям x и y соответственно. Необходимо отметить, что контуры объектов зачастую имеют неровный характер. Поэтому необходимо ввести порог изменения угла для предотвращения нахождения ложных углов контура объекта. Если порог меньше определенного значения, то угол не фиксируется.В данной работе осуществляется нахождение характеристических признаков типа «линия» и «угол» для многоугольников. Найденные значения признаков выводятся на экран. Задание1. Запустить файл программы Contur . exe . В опции Mode установить режим идентификации. 2. Используя опции меню Fail / Open выбрать файл с контуром изображения. На экране появится контур, на котором указаны вычисленные углы (величины сторон также вычислены). 3. Для каждого предложенного преподавателем контура необходимо вычислить его признаки. Содержание отчета 1. Название работы. 2. Цель работы. 3. Задание. 4. Контуры изображений и численные значения соответствующих им признаков. Контрольные вопросы1. Поясните метод пересекающихся прямых. 2. Какие признаки могут использоваться для распознавания объектов произвольной формы и объектов, которые можно аппроксимировать многоугольниками. 3. Поясните методику проведения машинных экспериментов. ЛАБОРАТОРНАЯ РАБОТА № 4 Распознавание многоугольников модифицированным методом максимальной клики. Цель работы : изучение методики распознавания объектов, которые можно аппроксимировать многоугольниками. Время выполнения работы :4 учебных часа. Теоретическая часть В предыдущей лабораторной работе была рассмотрена методика вычисления характеристических признаков изображения объекта. В данной работе рассматривается методика сравнения полученных признаков объекта с признаками эталона и формирования вывода о степени совпадения изображений эталона и объекта. Существует группа методов, учитывающих информацию о пространственных отношениях между признаками. Эти методы называются реляционными. Среди реляционных методов наибольшей универсальностью обладает метод, основанный на выделении максимальной клики на графе соответствия признаков эталона и образа. Этот метод дает хорошие результаты при распознавании сильно зашумленных объектов. В ходе проведенных исследований авторами разработана модификация метода максимальной клики [4-7], предназначенная для распознавания объектов, которые можно аппроксимировать многоугольниками. Полученные в виде контуров изображения из-за помех могут быть искажены (для широкого класса объектов контуры представляют собой многоугольники; в ряде случаев могут отсутствовать угол и части сторон, которые в процессе оконтуривания заменяются прямой линией). Пусть даны векторы признаков эталона и объекта: Yi =(yi1 , yi2 , yi3 , yi4 ), i=1,2,...,n (1) Zj =(zj1 , zj2 , zj3 , zj4 ), j=1,2,...,m, где yi1, zj1 - типы признаков эталона и объекта соответственно (yi1 = 0, zj1 = 0 - признаки типа “угол”; yi1 = 1, zj1 = 1 - признаки типа “линия”); yi2 , zj2 - величины углов в градусах (длины линий в метрах) эталона и объекта соответственно; yi3 , yi4, zj3 , zj4 - номера смежных признаков; n, m - число признаков эталона и объекта соответственно. Для решения задачи распознавания необходимо сопоставить признаки объекта и эталона. Результаты сопоставления называются назначениями, которым соответствуют вершины графа соответствий. Далее необходимо проверить совместимость назначений. В случае, если пара назначений совместима, то соответствующие вершины графа соединяются ребрами. На заключительном этапе распознавания следует найти мощность наибольшей максимальной клики графа соответствия. Рассмотрим теперь перечисленные этапы решения задачи распознавания. Составление назначений Составление назначений содержит следующие два этапа: Сравнение признаков по типу Проверка условий yi1 = zj1 , i=1,2,...,n; j=1,2,...,m (2) Проверка условий |yi2 - zj2 | / yi2 < e, (3) где е - малая положительная величина. Выполнение условий (2), (3) говорит о том, что данные признаки эталона и объекта однотипные и слабо отличаются друг от друга. При выполнении условий (2), (3) составляется список назначений (Yi, Zj), где i, j = 1,2,..., соответствующий списку вершин графа соответствий. Проверка совместимости назначений Проверка совместимости назначений содержит два следующих этапа. Проверка отсутствия противоречий Два назначения несовместны, если их 1-е или 2-е индексы совпадают; это означает, что один признак эталона назначается двум признакам объекта или один признак объекта назначается двум признакам эталона, что невозможно. Рассмотрим назначения (Yi , Zj ) и (Yk , Zl ). Они будут несовместны, если i=k или j=l. (4) Проверка соблюдения отношений смежности Два назначения несовместны, если признаки эталона смежны, а соответствующие признаки объекта не смежны. Два назначения также несовместны, если признаки объекта смежны, а соответствующие признаки эталона не смежны. Рассмотрим два признака эталона Yi , Yk . Они будут смежны, если yi 3 =k или yi 4 =k. (5) Признаки Yi и Yk не будут смежны, если yi
3
Пример. i=2, k=3: признаки Y2 и Y3 смежны (см. условие 5). Рассмотрим назначения (Yi , Zj ) и (Yk , Zl ) .Отношения не совместны, если Yi и Yk смежны, а Zj и Z l не смежны или, если Yi и Yk не смежны, а Zj и Zl смежны. Признаки Zj и Zl будут смежны , если z j 3 =l или z j 4 =l. (7) Признаки Z j и Z l не будут смежны, если z j
3
Вернемся к примеру. Пусть i=2, k=3 и имеется назначение (Y2 , Zn ); l = n-1 и имеется назначение (Y3 , Zn -1 ). Назначения совместны. Рассмотрим пару назначений (Y3 , Zn -1 ) и (Y2 , Z4 ). Они не совместны. Следовательно, назначения ( Yi , Zj ) и ( Yk , Zl ) не совместны, если выполняются условия (4), (5) и (8). Назначения ( Yi , Zj ) и ( Yk , Zl ) не совместны также, если выполняются условия (4), (6) и (7). Вершины графа vi и vj , соответствующие несовместным назначениям, не соединяются ребрами. В остальных случаях вершины соединяются ребрами. Формирование матрицы смежности VМ Cоответствующие парам вершин vi и vj элементы vij матрицы смежности графа будут нулевыми. В остальных случаях vij =1. Диагональные элементы матрицы будут нулевыми. Поиск мощности наибольшей максимальной клики графа Число вершин в наибольшей максимальной клике графа называется его мощностью и обозначается через M. Величина М характеризует степень соответствия распознаваемого объекта эталону (чем ближе величина M к максимальному значению, тем выше степень соответствия распознаваемого объекта эталону). Число вершин графа, входящих в наибольшее независимое, множество называется числом независимости этого графа и обозначается через При распознавании многоугольников графы соответствия эталона и объекта содержат одну или несколько максимальных клик одинаковой мощности М и поиск величины М существенно упрощается. Для нахождения величины М разработан модифицированный алгоритм [4-7]. Задание1. Запустить файл программы Contur . exe . В опции Mode установить режим идентификации ( Set Original ) . 2. Используя опции меню Fail / Open выбрать файл с эталоном. На экране появится контур, на котором указаны вычисленные углы (величины сторон также вычислены). 3. Закрываем окно с эталоном и открываем окно с распознаваемым объектом. В опции Mode автоматически устанавливается режим Compare (сравнения). В результате сравнения на информационной панели появится значение мощности клики графа. Примечание В разработанной программе существует два режима распознавания: для хороших изображений (объектов с ровными сторонами и четкими углами) и грубых изображений (объектов с нечеткими углами и неровными сторонами). Для того, чтобы распознавать хорошие изображения, необходимо выбрать вкладку Image / Fine . Для того, чтобы распознавать грубые изображения, необходимо выбрать вкладку Image / Rough . Выход из программы осуществляется при нажатии вкладки File / Exit . Содержание отчёта1. Название работы. 2. Цель работы. 3. Результаты машинных экспериментов: рисунки эталонов и изображений, М для каждой пары эталона и объекта. 4. Выводы: привести изображения и эталоны, которые соответствуют друг другу ( значение М наибольшее ). Контрольные вопросы1. Как составляются назначения? 2. Как проверяется их совместимость? 4. Поясните методику распознавания на ПЭВМ. 6. Что такое мощность клики? 7. Что такое максимальная клика? Приведите пример. Литература1. Хорн Б. Зрение роботов. –М.: Мир, 1989. 2. Техническое зрение роботов / Под ред. А.Пью. – М. : Машиностроение, 1987. 3. А.И. Логинов. Системы технического зрения. –М.: МИРЭА, 1991. 4. Рахманкулов В.З., Ахрем А.А., Герасимов В.В. Алгоритм распознавания объёмных образов на базе модифицированного метода максимальной клики // Управление информационными потоками. М.: Институт системного анализа, 2002. с. 295-305. 5. Рахманкулов В.З., Ахрем А.А., Герасимов В.В., Новиков О.А. Программно-алгоритмический комплекс распознавания образов многогранных объектов // Организационное управление и искусственный интеллект. М.: УРСС, 2003. с.208-224. 6. Макаров И.М., Рахманкулов В.З., Ахрем А.А., Герасимов В.В., Новиков О.А. Создание виртуальных моделей роботов и трехмерных сцен // Сборник докладов 3-й международной конференции «Идентификация систем и задачи управления». М.: 2004. с.87-88. 7. Макаров И.М., Рахманкулов В.З., Ахрем А.А., Герасимов В.В., Новиков О.А. Виртуальные модели технического зрения для адаптивных роботов // Сборник научных трудов МИФИ. М.: 2004. с.205-206. |