Реализация цифровых регуляторов
PAGE \* MERGEFORMAT 1
Лекция №8
Реализация цифровых регуляторов
Цифровые регуляторы могут быть реализованы в виде импульсных фильтров (на базе четырехполюсников в сочетании с квантователями и экстраполяторами), на основе микроЭВМ и цифровых устройств.
Передаточная функция цифрового регулятора в соответствии с рис.7.4б будет
(7.13)
причем всегда должно быть nm.
Разделим числитель на знаменатель на zn. Тогда для предельного случая n=m
(7.14)
Если a0=1, то из (7.14) можно получить линейный алгоритм работы цифрового управляющего устройства:
u[k]=b0e[k]+b1e[k-1]+…+bme[k-n]- (a1u[k-1]+a2u[k-2]+…+anu[k-n]). (7.15)
Из полученных соотношений можно установить, что цифровой регулятор оказывается физически реализуемым, если в (7.14) нет слагаемых с положительной степенью z. Наличие хотя бы одного члена в (7.14) с положительной степенью z означает «упреждение», т.е. показывает, что выходной сигнал опережает входной. В равной степени это относится и к слагаемым уравнения (7.15), т.е. значение u[k] будет определяться значениями опережающих его слагаемых u[k+1] и e[k+1].
Условием физической реализуемости цифрового регулятора, таким образом, является выполнение условия nm. Кроме того, при n=m знаменатель (7.14) не должен иметь сомножителя z-1 при b0 0 , т.е. должно быть также a00.
К цифровым регуляторам предъявляются требования к точности реализации параметров при их вычислении с ограниченной разрядностью процессоров.
Для обеспечения устойчивости регуляторов должно выполняться условие расположения полюсов их передаточной функции внутри единичной окружности на комплексной плоскости.
Передаточная функция цифрового регулятора обычно реализуется в виде программы ЭВМ, реализуемых методами прямого, последовательного и параллельного программирования.
При прямом программировании из передаточной функции (7.14) запишем уравнение в форме обратного преобразования:
(7.16)
решением которого будет:
(7.17)
В общем виде уравнение (7.17) может быть представлено, как разность двух групп слагаемых входного и выходного сигналов:
(7.18)
Для последовательного программирования передаточную функцию регулятора представляют в виде произведения простейших передаточных функций, каждая из которых реализуется простейшими программами:
(7.19)
где p – наибольшее из чисел n и m. Для каждой простейшей программы используется метод прямого программирования.
При параллельном программировании передаточная функция (7.14) представляется в виде (7.20)
где p – наибольшее из чисел n и m. Здесь также каждая из передаточных функций может быть реализована методом прямого программирования.
Пример 1
Пусть передаточная функция цифрового регулятора имеет вид:
Регулятор является физически реализуемым (n=2, m=1 при и устойчивым (полюсы z1=0.5, z2=0.1).
- Прямое программирование.
Из передаточной функции запишем линейное уравнение регулятора:
Выразим обратное z- преобразование к обеим частям уравнения:
Применяя метод прямой (непосредственной) декомпозиции к предыдущему уравнению
,
где или ,
получим систему:

Структура решения данной системы уравнений приведена на рис.1.

Рис.1. Прямое программирование передаточной функции
- Последовательное программирование.
Передаточную функцию регулятора запишем в виде произведения двух функций, например, вида:
Программирование выполним, представив произведение передаточных функций системой уравнений:
X(z)=(1+0.25z-1)E(z)+0.5z-1X(z)
U(z)=5X(z)+0.1z-1U(z).
Структурная схема решения системы приведена на рис.7.9.
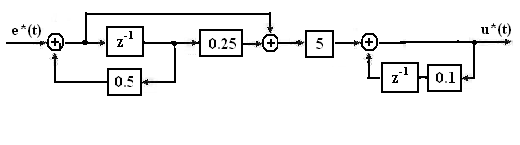
Рис.7.9 Последовательное программирование передаточной функции
- Параллельное программирование.
Разложим передаточную функцию регулятора на сумму простейших:
Составим систему уравнений, U(z)=U1(z)-U2(z)
U1(z)=9.375E(z)+0.5z-1U1(z)
U2(z)= 4.375E(z)+0.1z-1U2(z),
структурная схема решения системы приведена на рис.7.10.

Рис.2. Параллельное программирование передаточной функции
Для преобразования сложной дискретной передаточной функции к алгебраической сумме элементарных используйте две леммы высшей алгебры:
Лемма 1. Пусть - правильная рациональная дробь с действительными
коэффициентами и пусть S1 есть вещественный корень полинома Q(s)
кратности r, тогда существует такое число А и такой полином P1(s), что
справедливо равенство
,
где ; при этом - правильная рациональная дробь.
Лемма 2. Пусть - правильная рациональная дробь с действительными
коэффициентами и Q(s)=(s2+ps+q)mV(s), где , корни полинома не
являются корнями полинома V(s), V(s) не делится нацело на (s2+ps+q).
Тогда найдутся такие вещественные числа M и N и такой полином P1(s),что
,
где второе слагаемое будет также правильная рациональная дробь.
Пример:
Здесь использован метод неопределённых коэффициентов:
Примечание:
1..
2. Теорема о разложении многочлена на множители:
«Каждый (действительный или комплексный) многочлен степени относительно может быть единственным способом представлен в виде произведения постоянной и линейных множителей , именно
где - корни многочлена ; корню кратности соответствует множителей . Каждая пара множителей и , соответствующая паре комплексных сопряжённых корней и ,
может быть объединена в действительный квадратный множитель ».
Пример 2
Передаточная функция аналогового корректирующего устройства имеет вид
.
Определите дискретную передаточную функцию цифрового алгоритма управления объектом путём преобразования аналогового регулятора в цифровой при периоде квантования сигналов T=0,02с. Проверьте адекватность преобразования по амплитудно-фазовым частотным характеристикам непрерывного и цифрового корректирующих звеньев. Составьте программу работы ЦВМ на основании полученной дискретной передаточной функции и постройте структурную схему реализации алгоритма дискретного корректора.
Решение
Для получения дискретного аналога корректирующего алгоритма в форме обратных разностей используем аппроксимационную формулу Тастина
,
приведём первый коэффициент знаменателя к 1 и разделим числитель и знаменатель дискретной передаточной функции на :
.
Из последнего выражения
,
.
Обратное Z-преобразование этого выражения – рекуррентная форма дискретного управляющего алгоритма:
.
Структурная схема реализации полученного алгоритма в микроЭВМ представлена на рис.1.
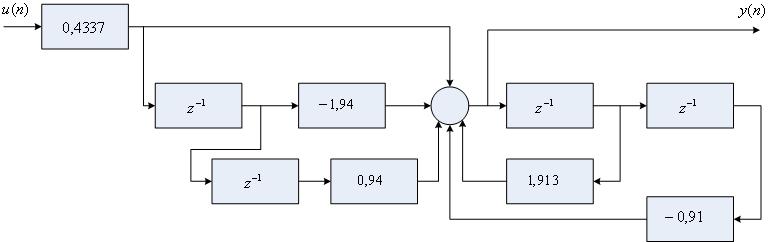
Рис.1. Структурная схема дискретного управляющего алгоритма
Греческий алфавит
|
Название буквы |
Прописная |
Строчная |
Название буквы |
Прописная |
Строчная |
|
Альфа |
|
|
Ню |
|
|
|
Бета |
|
|
Кси |
|
|
|
Гамма |
|
|
Омикрон |
|
|
|
Дельта |
|
|
Пи |
|
|
|
Эпсилон |
|
|
Ро |
|
|
|
Дзета |
|
|
Сигма |
|
|
|
Эта |
|
|
Тау |
|
|
|
Тета |
|
|
Ипсилон |
|
|
|
Йота |
I |
Фи |
|
|
|
|
Каппа |
|
|
Хи |
|
|
|
Лямбда |
|
|
Пси |
|
|
|
Мю |
|
|
Омега |
|
|














































Список рекомендуемой литературы
1. Бесекерский В.А., Попов Е.П. Теория систем автоматического управления: Учебник – СПб: Изд-во «Профессия», 2003-2007.-752 с.
2. Бесекерский В.А. Цифровые автоматические системы.- М.:Наука,1976.-576с.
3. Васильев Е.М., Коломыцев В.Г. Теория автоматического управления. Нелинейные системы: Учебное пособие – Пермь: Изд-во ПНИПУ, 2011.-115с.
4. Васильев Е.М., Коломыцев В.Г. Теория автоматического управления. Дискретные системы: Учебное пособие – Пермь: Изд-во ПНИПУ, 2012.-152с.
5. Денисенко В.В. Компьютерное управление технологическим процессом, экспериментом, оборудованием. — М.: Горячая линия-Телеком, 2009.-608с.
6. Диркс Г.Г., Коломыцев В.Г. Проектирование микропроцессорных систем автоматического управления. Ч.1. Синтез систем автоматического управления: Учебное пособие - Пермь: Изд-во ПГТУ, 1997.-175с.
7. Дорф Р., Бишоп Р. Современные системы управления:Учебник-М.:Изд-во «Лаборатория Базовых Знаний», 2002-2004.- 832 с.
8. Душин С.Е., Зотов Н.С., Имаев Д.Х. и др. Под ред. В.Б.Яковлева. Теория автоматического управления: Учебник - М.: Изд-во «Высшая школа», 2005.-567 с.
9. Иванов В.А. и др. Математические основы теории автоматического управления. В 3-х т. Под ред. Б.К. Чемоданова. М.: Изд. МГТУ, Т1-2006, Т2-2008, Т3-2009.
10. Куо Б. Теория и проектирование цифровых систем управления: пер. с англ.- М: Машиностроение, 1986. – 448 с.
11. Филлипс Ч., Харбор Р. Системы управления с обратной связью: Учебник - М.: Изд-во «Лаборатория Базовых Знаний», 2001. – 616 с
Реализация цифровых регуляторов