СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ (САР)
ЛЕКЦИЯ 7
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ (САР)
Автоматическое регулирование параметра – это операция автоматического изменения регулируемой величины по какому-либо закону.
СЛАЙД № 2
Объект регулирования – аппарат, механизм или система, у которой посредством автоматического регулятора поддерживается заданное значение параметра.
Параметр технологического процесса, который необходимо поддерживать постоянным или изменять по определенному закону, называется регулируемой величиной или регулируемым параметром. Это физическая величина (температура, уровень, давление и т.д.), характеризующая протекание производственного процесса и определяющая действие цепи регулирования.
Параметр контроля – это физическая величина, определяющая ход технологического процесса и подлежащая только измерению.
СЛАЙД № 3
Текущее значение параметра – значение параметра регулирования в настоящий момент времени.
Заданное значения параметра – значение, на котором необходимо стабилизировать параметр регулирования.
Сигнал рассогласования - разность между текущим и заданным значением регулируемого параметра
СЛАЙД № 4
Возмущающее воздействие - воздействие, стремящееся нарушить требуемую функциональную связь между задающим воздействием и регулируемой величиной.
Управляющее воздействие – воздействие, стремящееся компенсировать возмущение с целью стабилизации параметра регулирования на заданное значение.
СТРУКТУРА САК и САР
СЛАЙД № 5
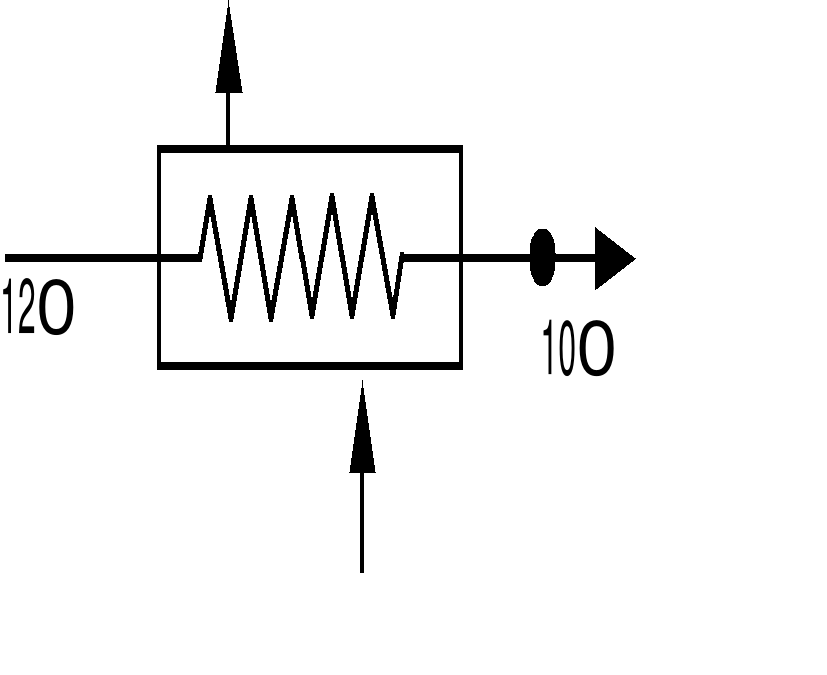
Горячий целевой продукт (120С) поступает из соседнего цеха и охлаждается хладагентом до 100С (в точке А).
Рис. 7.1
В данной схеме регулирования - температура целевого продукта на входе в теплообменник всегда 120С, расход целевого продукта не меняется, температура хладагента на входе в теплообменник не меняется, расход хладагента на входе в теплообменник не меняется.
Температура целевого продукта на выходе из теплообменника в точке А будет 100°С, до тех пор пока не изменится температура целевого продукта на входе в теплообменник (120С). Как только величина 120С изменится, данная схема регулирования перестаёт работать. В этом случае надо будет изменить расход хладагента на входе в теплообменник, а на трубе подачи хладагента нет клапана.
СЛАЙД № 6, 7
Система автоматического контроля: Предназначена для автоматического контроля за технологическими параметрами. объект контроля, обобщённый датчик Доб, канал связи, вторичный прибор (контроллер, ПК).
Таким образом, данная схема регулирования должна быть усовершенствована. В результате получим схему регулирования СЛАЙД № 8
Рис.7.2. САР температуры целевого продукта.
Итак, необходимо стабилизировать температуру в точке А объекта регулирования на уровне 100С – это заданное значение регулируемого параметра. Та температура, которая будет в точке А на самом деле, называется текущим значением регулируемого параметра. Текущее значение регулируемого параметра воспринимается обобщенным датчиком и преобразуется им в унифицированный выходной сигнал. Этот унифицированный сигнал поступает на вторичный прибор и регулирующее устройство – контроллер. Вторичный прибор показывает текущее значение целевого продукта в точке А. Например, текущее значение регулируемого параметра 90°С поступает на контроллер, а в нём заложена величина заданного значения температуры в точке А 100°С. Контроллер в соответствии с программой подсчитывает сигнал рассогласования = Ттек – Тзад, то есть
= 90 С – 100 С = –10 С.
Сигнал рассогласования считается входным сигналом исполнительного устройства. Регулятор анализирует величину и знак и по программе в соответствии со своим законом регулирования вырабатывает регулирующее воздействие . В данном случае Ттек=90С, а надо 100С, следовательно, затвор регулирующего органа в соответствии с величиной и знаком переместится и уменьшит подачу хладагента. Если же из соседнего цеха в точку Б придет целевой продукт с температурой 150С, то, если не принять мер, в точке А вместо 100С будет, например, 130С. Данная система регулирования приведет в норму температуру в точке А, в точке А будет 100С. Произойдёт это за счёт увеличения подачи хладагента. Затвор исполнительного устройства в соответствии с величиной и знаком переместится и увеличит подачу хладагента.
Температура целевого продукта в точке Б – это главное возмущающее воздействие. Регулятор в ответ вырабатывает регулирующее воздействие .
Итак, на объект регулирования действуют 2 воздействия: возмущающее и регулирующее. Задачей САР является компенсировать влияние возмущающего воздействия на объект регулирующим воздействием. В результате этой компенсации происходит переходный процесс регулирования. Изменение во времени регулируемой величины в переходном процессе происходит за время регулирования р.
СЛАЙД № 9, 10
Структура САР: объект регулирования, обобщённый датчик Доб, канал связи, вторичный прибор (ВП, ПК), регулирующее устройство (регулятор, контроллер), исполнительное устройство (исполнительный механизм + регулирующий орган). Рассмотрим процесс стабилизации температуры выходящего из теплообменника целевого продукта в точке А.
7.2 КЛАССИФИКАЦИЯ САР
1. По назначению (по характеру изменения задания):
- стабилизирующая АСР - система, алгоритм функционирования которой содержит предписание поддерживать регулируемую величину на постоянном значении (x = const);
- программная АСР - система, алгоритм функционирования которой содержит предписание изменять регулируемую величину в соответствии с заранее заданной функцией (x изменяется программно);
- следящая АСР - система, алгоритм функционирования которой содержит предписание изменять регулируемую величину в зависимости от заранее неизвестной величины на входе АСР (x = var).
2. По количеству контуров:
- одноконтурные - содержащие один контур,
- многоконтурные - содержащие несколько контуров.
4. По функциональному назначению:
АСР температуры, давления, расхода, уровня, напряжения и т.д.
5. По характеру используемых для управления сигналов:
- непрерывные,
- дискретные (релейные, импульсные, цифровые).
7. По виду используемой для регулирования энергии:
- пневматические,
- гидравлические,
- электрические,
- механические и др.
7.3 ПРИНЦИПЫ РЕГУЛИРОВАНИЯ
СЛАЙД № 11
Рассмотрим следующие принципы регулирования:
По отклонению (принцип Ползунова-Уатта);
По возмущению (Понселе);
Комбинированный (по отклонению и возмущению);
По отклонению По возмущению
Комбинированный
Цель этих трех принципов одна и та же – стабилизировать температуру целевого продукта в точке А на уровне, например 100С.
Итак, рассмотрим по порядку.
САР по отклонению. Она замкнутая, потому что регулируемый параметр - температура целевого продукта в точке А и регулятор связаны каналом связи.
Достоинства. Принцип широко распространен, т.к. САР по отклонению имеет ценное свойство – регулятор воздействует на объект таким образом, чтобы устранить погрешность регулирования независимо от того, какими возмущающими действиями она вызвана. Это свойство САР особенно ценно в промышленных условиях, где число возмущающих воздействий может быть велико. В нашем случае, помимо главного возмущающего воздействия, т.е. изменения ТБ, могут быть побочные воздействия. Например, прохудение теплообменника из-за ржавчины, т.е. потери хладагента, также из-за наличия осадка солей на стенках теплообменника – ухудшение теплообмена.
Недостаток. САР инерционна.
САР по возмущению. Здесь расход хладагента автоматически меняется в зависимости от температуры целевого продукта на его входе, т.е. в зависимости от величины главного возмущающего воздействия.
Достоинства. Успеваем среагировать на главное возмущающее воздействие и скомпенсировать его влияние на температуру ТА ещё до того, как температура в точке А изменилась бы.
Недостаток. Эта САР разомкнута, а именно, отсутствует связь регулятора с результатом его работы, т.е. с точкой А нет канала связи (т.е. САР беззащитна перед побочными возмущающими воздействиями).
Комбинированная САР. Использованы достоинства предыдущих двух схем. Для компенсации главного возмущающего воздействия (изменение ТБ) используется САР по возмущению. Для компенсации остальных возмущающих воздействий берется от САР по отклонению корректирующий контур, выходной сигнал которого поступает в виде корректирующего задания основному регулятору, т.е. корректируется задание ТБ.
СИСТЕМА АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКИХ ПАРАМЕТРОВ (САР)