Погрешности ГКК при прямолинейном маневре объекта
Министерство образования и науки РФ
Федеральное государственное бюджетное учреждение высшего профессионального образования «Пермский национальный исследовательский политехнический университет»
Кафедра ИВК ЛА
КУРСОВОЙ ПРОЕКТ
по дисциплине: "Гироскопические приборы летательных аппаратов"
Тема: Погрешности ГКК при прямолинейном маневре объекта
Студент группы ИВК-08-1
Руководитель проекта
доцент кафедры ИВК ЛА, к.т.н., доцент ___________________
Работа защищена __________ с оценкой
Пермь 2012
Содержание
Теоретическая часть_____________________________________________3
Вывод уравнения движения гирокомпаса___________________________6
Исходные данные______________________________________________ 10
Расчет параметров______________________________________________10
Моделирование влияния прямолинейного маневра на прибор_________ 11
Заключение___________________________________________________ 13
Список литературы_____________________________________________14
Теоретическая часть
Гироскопическим компасом (ГК) называется гироскопическое устройство, предназначенное для указания плоскости истинного меридиана и позволяющее определять курс объекта и пеленги ориентиров, а также осуществлять стабилизацию в азимуте различных устройств на движущемся объекте. Гирокомпас обладает избирательностью по отношению к плоскости истинного меридиан.
По способу придания избирательности различают гирокомпасы:
- с непосредственным управлением (маятниковый ГК);
- с косвенным управлением (корректируемый ГК);
- аналитический ГК на гироскопических измерителях угловой скорости (статическая или динамическая схема)
Маятниковый гирокомпас (рис.1) представляет собой трехстепенной гироскоп, у которого центр масс смещен вниз относительно точки подвеса в плоскости, перпендикулярной главной оси. Конструктивная схема гирокомпаса обеспечивает нахождение главной оси гироскопа в плоскости горизонта, при отклонении оси из этого положения появляется маятниковый момент, который вызывает прецессию гироскопа относительно вертикальной оси. Как будет показано ниже, маятниковый момент заставляет ось гироскопа совершать колебания относительно плоскости меридиана. При этом положением равновесия является полуденная линия, т.е. маятниковый гирокомпас обладает избирательностью относительно плоскости меридиана.
Корректируемый гирокомпас построен на трехстепенном астатическом гироскопе, у которого наружная ось подвеса расположена вертикально. На внутреннем кольце подвеса закреплен маятник-корректор, реагирующий на отклонение главной оси от плоскости горизонта. Сигнал с маятника-корректора поступает на двигатели, расположенные на осях подвеса. Цепь коррекции, состоящая из маятника, усилителя и моментного двигателя на внутренней оси подвеса, вызывает такое же движение гироскопа как маятниковый момент. Подача сигнала с маятника-корректора на момент двигателя на наружной оси подвеса обеспечивает демпфирование колебаний оси гироскопа и приводит его в положение равновесия. Удержание оси гирокомпаса в плоскости меридиана необходимо для непрерывного определения истинного курса подвижного объекта.
В аналитическом гирокомпасе плоскость меридиана не моделируется (фиксируется) осью гироскопа, а положение заданного направления относительно плоскости меридиана (азимут) рассчитывается в вычислительном устройстве. Информация для вычислителя поступает от гироскопических измерителей угловой скорости (ГИУС), входные оси которых расположены в плоскости горизонта. Угловая скорость плоскости горизонта измеряется ГИУС в положении, неподвижном относительно плоскости меридиана (статическая схема) или при периодическом движении относительно нее (динамическая схема).
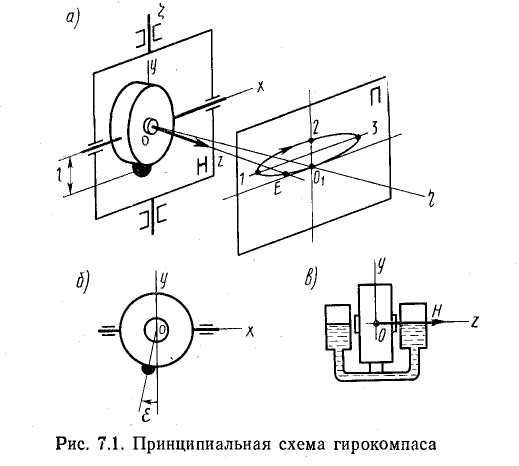
Рисунок 1. Принципиальная схема гирокомпаса.
На рис.1 показан принцип действия простого маятникового ГК, предтавляющий собой гироскоп с тремя степенями свободы, ось наружной рамы которого вертикальна, а центр масс (ЦМ) смещен на некоторую величину вдоль оси перпендикулярной плоскости, заключающей оси собственного вращения ротора Oz и кожуха гироскопа Ox.
Рассмотрим работу ГК на неподвижном относительно Земли основании. Проследим за движением апекса Е гироскопа на изображающей плоскости П, если вначале вектор Н направлен вдоль географического меридиана на север. Из-за наличия вертикальной составляющей вращения Земли U*sin апекс гироскопа начнет отклоняться от точки О1 к точке влево. При этом на ось Оx проецируется горизонтальная составляющая вращения Земли U*cos и вектор Н поднимается над плоскостью горизонта. Возникающий при этом маятниковый момент будет вызывать прецессию гироскопа, замедляющую движение апекса гироскопа влево, и в точке 1 оно прекратится. На участке 1-2 скорость прецессии от маятникового момента превосходит U*sin и апекс движется вправо. В точке 2 момент от маятника достигает максимального значения. На участке 2-3 проекция U*cos на ось Ox изменит знак, апекс начнет опускаться, маятниковый момент уменьшается, скорость движения апекса в азимуте уменьшается и в точке 3 обратиться в нуль. На участке 3-О1 скорость прецессии гироскопа в азимуте от маятникового момента меньше U*sin и апекс движется к исходной точке О1. Таким образом, апекс гироскопа совершает незатухающие колебания по эллипсу, вытянутому в азимуте, центр которого находится в плоскости меридиана.
К затуханию собственных колебаний ГК приводит, например, смещение плеча маятника на небольшой угол к востоку (рис.1б) либо закрепление на кожухе гироскопа сообщающихся сосудов с жидкостью, соединенных тонкой трубкой (рис.1в).
Вывод уравнения движения гирокомпаса
Исследование гирокомпаса начинают с составления дифференциальных уравнений движения. В качестве чувствительного элемента гирокомпаса будем иметь в виду гиросферу. Базовой системой координат выберем навигационный сопровождающий трехгранник (0nUpe) с ориентацией осей по направлениям восток-север-зенит. Поворот гиросферы относительно системы отсчета 0nUpe можно представить как последовательное вращение ее на углы , и , где – угол азимутального поворота гиросферы, – угол подъема конца оси N–S над плоскостью горизонта, а – угол поворота гиросферы вокруг оси N–S. При повороте на углы и подвижные оси займут положение 0xyz (оси Резаля) (рис.2).
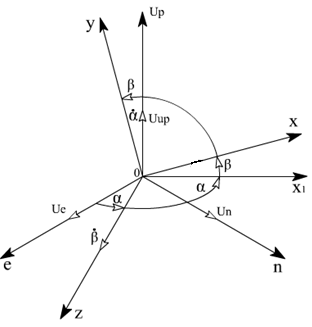
Рисунок 2. Углы и , определяющие положение чувствительного элемента гирокомпаса.
Выводим уравнение в системе ОnUpe:
Матрицы ориентации объекта:

Найдем проекции угловой скорости на оси Резаля:

Гироскопы и акселерометры измеряют всё относительно инерциального пространства. Нужно учитывать движение Земли вокруг своей оси и вокруг Солнца. Проекции скорости вращения географического трёхгранника будут равны:
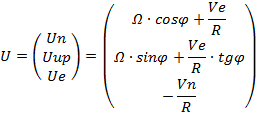
Где:
– угловая скорость вращения Земли, =7,29*10-5 (c-1).
– географическая широта.
Vn, Ve – северная и восточная составляющие воздушной скорости.
В базовой системе координат при Ve=0. Получим:
Для малых углов и получаем угловые скорости системы координат:
Чтобы получить дифференциальное уравнение движения воспользуемся методом Эйлера:
Где:
;
M – момент внешних сил;
Найдем вектор момента количества движения:
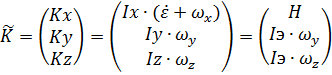
Когда число обобщённых координат нечётно, то можно пренебречь, получим:
– упрощённое уравнение, оно учитывает только прецессионные движения.
Запишем уравнение акселерометра, которое учитывает моменты инерции, демпфирования, сил упругости, возмущения.
- демпфирующий момент
- направляющий момент, он должен быть направлен так, чтобы обеспечить угловую скорость =0.
Система уравнений гирокомпаса в итоге будет иметь вид:
Если учитывать только ошибки смещения «0» гироскопа и прямолинейный маневр, то получим систему:
Исходные данные
Угловая скорость вращения гироскопа – до 30000об/мин;
Радиус цилиндра ротора: R=5 см=0.05 м;
Длина ротора: L=2,5 cм=0.025 м;
Материал ротора – медь, =8,93*103(кг/м3).
Маневр – прямолинейный, за время 30 минут скорость изменяется с 30 узлов до 15 узлов.
Ошибка гироскопа: =0,1град/час.
Коэффициенты: Kz =3,83·10-5
Ky=3,58·10-6
K =318 В/рад.
T0=30 с.
Расчет параметров










Моделирование влияния прямолинейного маневра на прибор
Моделирование поведения ГКК при прямолинейном маневре на языке С++:
#include "stdafx.h"
#include "math.h"
int _tmain(int argc, _TCHAR* argv[])
{
float
pi=3.14,i=0,V,g=9.8,Un,kz,kb,ky,Vn,Ve,alfai1,betai1,Uai1,psi,
t=30*60, //время моделирования 30 мин (сек)
n=1000, //количество шагов
h=t/n, //шаг моделирования (сек)
Wz=0.0000729, //угловая скорость вращения земли (рад/сек)
R=6371000, //радиус земли (м)
fi=0, //широта (рад)
alfai=0,
betai=0,
Uai=0;
kz=0.0000383;
ky=0.00000358;
kb=318; //(В/рад)
printf("t=%f h=%f",t,h);
getchar();
//решение
V=((30-15)*0,514)/t; //заданная скорость
psi=45*pi/180; //курс (рад)
Vn=V*cos(psi); //северная составляющая скорости
Ve=V*sin(psi); //восточная составляющая скорости
printf("V=%f Vn=%f Ve=%f",V,Vn,Ve);
getchar();
Un=Wz*cos(fi)-(Ve/R);
FILE*x;
while(i<t)
{
i++;
alfai1=h*(kz*Uai)+alfai;
betai1=h*(-(Un*alfai)-(ky*Uai))+betai;
Uai1=h*(kb*betai-Uai-kb*(Vn/g))+Uai;
alfai=alfai1;betai=betai1;Uai=Uai1;
x=fopen("znacheniya.txt","a+");
printf("alfai=%f betai=%f Uai=%f\n",alfai,betai,Uai);
fprintf(x,"alfai=%f betai=%f Uai=%f\n",alfai,betai,Uai);
fclose(x);
}
getchar();
return 0;
}
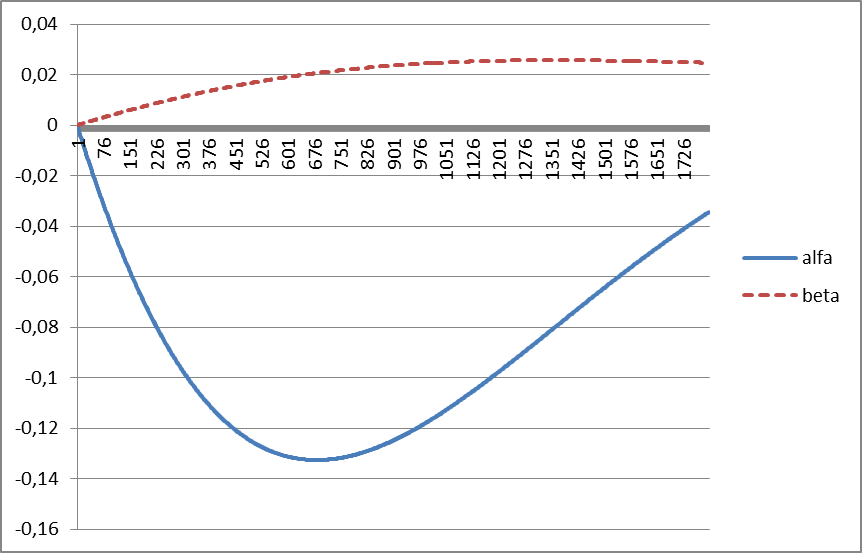
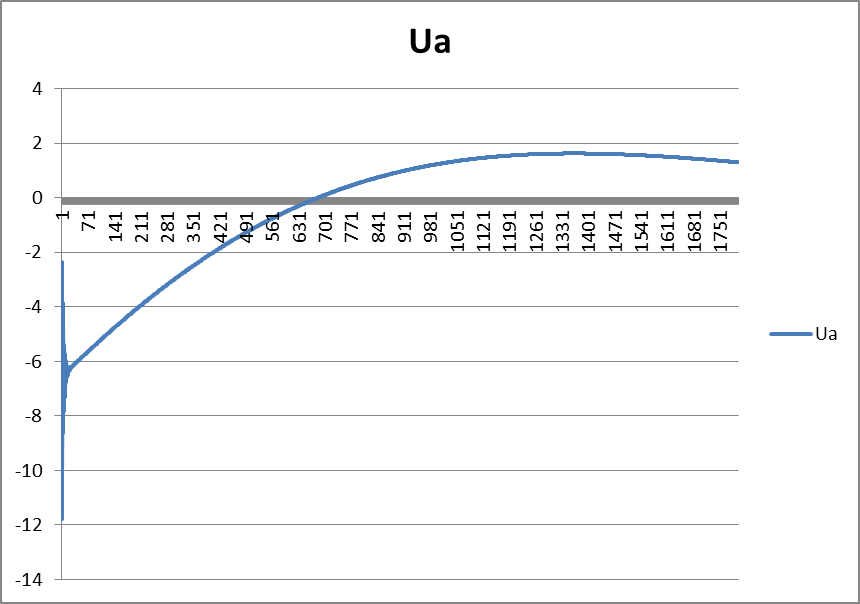
Построим графики , и Ua от времени, при учёте прямолинейного маневра:
Заключение
В результате работы были выполнены следующие задачи:
- рассмотрена конструкция ГКК;
- выведена система уравнений ГКК;
- выполнено моделирование поведения ГКК при прямолинейном маневре в среде С++;
Список литературы
- Пельпор Д.С. «Гироскопические системы», 2 часть, 1986г.
- Г. Корн, Т. Корн «Справочник по математике», 1972г.
- Ривкин С.С. «Теория гироскопических устройств», 1962г.
- Конспект лекций по дисциплине «Гироскопические приборы».
Погрешности ГКК при прямолинейном маневре объекта