РАЗРАБОТКА ВЫЧИСЛИТЕЛЬНОГО БЛОКА СИСТЕМЫ ЭЛЕКТРОМАГНИТНОГО ПОЗИЦИОНИРОВАНИЯ
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РОССИЙСКОЙ ФЕДЕРАЦИИ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
«КУБАНСКИЙ ГОСУДАРСТВЕННЫЙ УНИВЕРСИТЕТ»
(ФГБОУ ВПО «КубГУ»)
Физико-технический факультет
Кафедра радиофизики и нанотехнологий
Допустить к защите в ГАК
_______.______. 2013 г.
Заведующий кафедрой
д-р физ.-мат. наук, профессор
_______________Г. Ф. Копытов
ДИПЛОМНАЯ РАБОТА
РАЗРАБОТКА ВЫЧИСЛИТЕЛЬНОГО БЛОКА СИСТЕМЫ ЭЛЕКТРОМАГНИТНОГО ПОЗИЦИОНИРОВАНИЯ
Работу выполнил_______________________ Дмитриев Гордей Владимирович
Специальность 210302 – Радиотехника
Научный руководитель
канд. физ. мат. наук, доцент _____________________________ Г. П. Ильченко
Нормоконтролер
канд. физ. мат. наук, доцент ______________________________ М. А. Жужа
Краснодар 2013
Реферат
Дипломная работа 54 с., 15 рис., 12 табл., 19 источников.
ЭЛЕКТРОМАГНИТНЫЕ СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ, НИЗКОЧАСТОТНЫЕ ЭЛЕКТРОМАГНИТНЫЕ СИСТЕМЫ, ИСТОЧНИК МАГНИТНОГО ПОЛЯ, СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ПЕРЕМЕННОГО ТОКА, СИСТЕМА ПОЗИЦИОНИРОВАНИЯ ИМПУЛЬСНОГО ТОКА, RFID-СИСТЕМЫ ПОЗИЦИОНИРОВАНИЯ, ДАТЧИК ЭЛЕКТРОМАГНИТНОГО ПОЛЯ, КАТУШКА ИНДУКТИВНОСТИ, ВЗАИМНАЯ ИНДУКЦИЯ
Объектом разработки данной дипломной работы является вычислительный блок системы, предназначенной для позиционирования с помощью электромагнитного поля.
Целью работы является разработка вычислительного блока системы электромагнитного позиционирования, расчет компонентов блока системы электромагнитного позиционирования, изучение взаимного влияния катушек индуктивности и стабильности системы электромагнитного позиционирования.
В результате выполнения дипломной работы разработан вычислительный блок системы электромагнитного позиционирования. Выполнено сравнение трех принципов электромагнитного позиционирования. Проведено подробное сравнение коммерческих систем электромагнитного позиционирования. Рассчитаны такие компоненты систем электромагнитного позиционирования, как катушки индуктивности, выполнены необходимые измерения и расчеты. Произведен расчет влияния индукции магнитного поля в условиях парной работы катушек индуктивности на одной частоте, в зависимости от расстояния. Построены графики. Выявлены зависимости в разбросе флуктуаций, показаны пути решения проблемы биений. Произведен расчет влияния индукции магнитного поля в условиях парной работы катушек индуктивности на разных частотах. Построены графики. Показана разница в функционировании системы, которая работает на разных частотах, и на одной частоте.
Содержание
|
Реферат . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
2 |
|
Введение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
4 |
|
1 Электромагнитное позиционирование . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
6 |
|
8 16 |
|
24 |
|
2 Методика измерений . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
28 |
|
2.1 Выбор и расчет катушек индуктивности как компонентов системы электромагнитного позиционирования. . . . . . . . . . . . . . . 2.2 Измерение индукции электромагнитного поля в условиях парной работы катушек индуктивности. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
28 30 |
|
3 Результаты измерений . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
35 |
|
3.1 Измерение зависимости магнитной индукции от расстояния при одинаковой частоте работы катушек индуктивности . . . . . . . . . . . . . . . . . |
35 |
|
3.2 Измерение зависимости магнитной индукции от расстояния при разной частоте работы катушек индуктивности. . . . . . . . . . . . . . . . . . . . . . |
44 |
|
Заключение . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
50 |
|
Список использованных источников. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . |
51 |
Введение
Актуальность развития методов точного определения координат и углов ориентации того или иного объекта по отношению к некоторой заданной системе координат трудно переоценить. Определение пространственных и угловых координат движущихся объектов лежит в основе решения многих важных научных и технических задач. В настоящее время существует множество систем, которые решают задачу определения местоположения объекта. Однако, в определенных случаях, применение распространенных систем позиционирования объектов невозможно.
Позиционирование по электромагнитному полю сравнительно новая область в части определения местоположения объектов. Однако системы электромагнитного трекинга (позиционирования) уже активно применяются во многих сферах. В некоторых случаях использование электромагнитных систем позиционирования – единственный способ определить линейное положение и ориентацию подвижного объекта. Область применения систем электромагнитного позиционирования чрезвычайно широка. Кроме того такие системы имеют довольно высокую точность и в настоящее время ведутся работы по усовершенствованию систем электромагнитного позиционирования и уменьшению недостатков.
Системы оптического или ультразвукового трекинга в ближней зоне имеют не слишком высокую точность, которая необходима, например в медицине. Также эти системы имеют низкую скорость обновления, что в некоторых случаях недопустимо. Кроме того, всем этим системам необходимо иметь прямую видимость между излучателем и приемником. В таких случаях применение электромагнитных систем позиционирование единственный выход, особенности которых представляет особый интерес.
Область электромагнитного позиционирования на настоящий момент не получила широкого описания, однако отдельные исследования дают впечатляющий результат.
Целью данной работы являлось разработка вычислительного блока системы электромагнитного позиционирования. Изучение стабильности системы электромагнитного позиционирования.
При этом важным является решение следующих задач:
- описать преимущества и недостатки систем электромагнитного позиционирования, показать перспективы развития данной области;
- сопоставить принципы электромагнитного позиционирования;
- провести сравнение коммерческих систем электромагнитного позиционирования;
- провести расчет компонентов систем электромагнитного позиционирования;
- выяснить стабильность системы, произвести расчет влияния индукции магнитного поля в условиях парной работы катушек индуктивности на одной частоте, в зависимости от расстояния. Произвести расчет влияния индукции магнитного поля в условиях парной работы катушек индуктивности на разных частотах.
1 Электромагнитное позиционирование
Актуальность развития методов точного определения координат и углов ориентации того или иного объекта по отношению к некой заданной системе координат сегодня трудно переоценить. Определение пространственных и угловых координат движущихся объектов лежит в основе решения многих важных научных и технических задач.
Наибольшую сложность представляют задачи высокоточного управления объектами: маневрирование вблизи поверхности земли, стыковка подвижных объектов и прочие [1].
Особое место среди систем измерение положения тел занимают низкочастотные электромагнитные системы. Первые упоминания о них относятся к семидесятым годам XX века [2]. Наибольшую известность в России магнитное позиционирование имеет в отношении к термину НСЦИ – нашлемная система целеуказания и индикации, применяемая, в основном, в авиации для управления бортовыми системами направлением взгляда пилота.
В настоящее время существует множество систем, которые решают задачу определения местоположения объекта. Однако, в определенных случаях, применение распространенных систем позиционирования объектов невозможно. В таких случаях использование электромагнитных систем позиционирования – единственный способ определить линейное положение и ориентацию подвижного объекта. Кроме того, что он не требует прямой видимости между генератором поля и подвижным приемником, данный метод обладает высокой точностью. Системы низкочастотного магнитного позиционирования работают в различных условиях – при высоком давлении и температуре, а также в загрязненной среде [3]. Поэтому особенно подходят для использования в местах недоступных для человека или там, где применение других, обычных датчиков, невозможно. Например, на больших глубинах (в глубоководной морской добыче), в доменных печах и многих других случаях.
Суть метода состоит в возможности вычисления взаимного положения и ориентации генератора и приемника информационного магнитного поля, которое генерируется и измеряется системой позиционирования в зоне перемещения. Компоненты генерируемого поля, измеряемые подвижным приемником, сравниваются с вычисляемыми значениями для предполагаемого положения и ориентации подвижного приемника в системе координат генератора поля. Итерационные процедуры позволяют приблизить предполагаемые координаты приемника к их реальным значениям [4].
Из очевидных соображений число выполняемых измерений должно быть не меньше числа искомых координат. Таким образом, один цикл измерений будет давать полный набор координат, определяющих взаимное положение и ориентацию генератора и приемника генерируемого информационного магнитного поля. Дискретно–периодическое вычисление координат по такому методу возможно в процессе взаимного перемещения генератора и приемника.
В общем случае все многообразие применений магнитного позиционирования может быть сведено к двум основным типам задач:
– поиску цели, когда основное значение имеет определение ориентации подвижного объекта при малом диапазоне линейных перемещений (дополненная реальность, авиационное целеуказание);
– задаче навигации, т. е. определению линейных координат подвижного объекта при его направленном удалении от начального положения (подземная навигация, инвазивная медицина) [5].
Наиболее сложной в реализации является комбинация двух указанных задач, например, в биомеханике и спортивном тренинге, когда свободные движения человека при большом радиусе поворота в широких диапазона влекут за собой изменение все шести координат.
1.1 Способы магнитного позиционирования
В настоящий момент известны три способа магнитного позиционирования – AC-позиционирование (alternating current), DC-позиционирование (direct current), а также перспективный метод ADC-позиционирования. Все способы отличаются характером генерируемого магнитного поля. AC-метод построен на одновременном и непрерывном генерировании трех синусоидальных полей на разных частотах. DC-метод предполагает генерирование последовательности импульсных полей разной ориентации. Метод свободен от действия вихревых токов в окружающем интерьере, которые наводятся синусоидальным полем, и ограничивают точность позиционирования. ADC-метод основан на том, что обмотки генератора магнитного поля возбуждаются знакопеременными импульсами тока с плоскими вершинами. Это дает увеличение помехоустойчивости, точности, частоты смены информации [5].
В авиационном целеуказании система электромагнитного позиционирования, как говорилось ранее, применяется с 70-x годов прошлого века. Генератор магнитного поля фиксируется в кабине, а подвижный приемник располагается на шлеме пилота. Координаты шлема находят итерационным решением системы уравнений. Они соотносят аналитическую модель магнитного поля в зоне перемещения шлема и результаты магнитных измерений подвижными датчиками, находящимися в приемнике [5]. Общая структура системы магнитного позиционирования, применяемая в авиации, изображена на рисунке 1.
Такие системы в авиации чрезвычайно перспективны, они не требует прямой видимости между генератором и приемником. Они компактны и хорошо работают в свободном от металла пространстве, позволяют достичь более точного позиционирования в широких диапазонах линейных и угловых перемещений подвижного объекта, чем любые другие системы. Если в окружении имеется металл, проводят корректирующие процедуры, которые минимизируют погрешности позиционирования.
Рисунок 1 – Структура системы магнитного позиционирования,
применяемая в авиации
Интерес к применению систем электромагнитного трекинга (определения позиции и ориентации объекта) в данном классе задач также вызван тем, что радиолуч стандартной посадочной системы подвержен влиянию погоды, почвы, отражающих объектов. В результате на последней стадии посадки стандартные радиосистемы не всегда обеспечивают точность, необходимую для контроля снижения самолета. На низкочастотное магнитное поле практически не воздействуют указанные факторы из-за их низкого влияния на магнитную проницаемость среды. Типичная магнитная система посадки самолетов использует наземный излучатель, который содержит две ортогональных обмотки. Подвижный приемник установлен на борту летательного аппарата. Дополнительно на земле устанавливают стационарный приемник-монитор для контроля работы излучателя [6].
Исторически первые магнитные системы позиционирования использовали переменное магнитное поле, генерируемое на частотах до десятков килогерц. Они получили название АС-системы (системы позиционирования переменного тока). Основной недостаток АС-систем – снижение точности позиционирования из-за сильного искажения рабочего поля полями вихревых токов, наводимых системой в условиях окружения металлом. В случае применения магнитных систем позиционирования в бортовых системах целеуказания источниками погрешности служили как подвижный металл на шлеме, так и интерьер кабины, неподвижный относительно генератора поля [6]. Метод компенсации погрешностей, вносимых шлемом, основан на расчёте в реальном времени поправочной величины, моделирующей его влияние на приемник, для каждого элемента нашлемного металла. Рабочее поле находится путем вычитания суммы смоделированных поправок из реально измеряемой величины поля. Данная модель работает в неоднородном поле, во всем диапазоне положений и ориентаций шлема.
В системах переменного типа источник может быть выполнен в виде трех взаимно ортогональных катушек с общим магнитным центром, каждая из которых питается переменным током определенной частоты от своего генератора [6].
Также существует тип систем позиционирования, который основан на позиционировании по постоянному (квазипостоянному) току. В таких системах постоянное магнитное поле создается источником, представляющим собой определенную комбинацию электромагнитов, питание которых осуществляется стабилизированным постоянным током.
Датчиком является размещенная на защитном шлеме группа малогабаритных трехкомпонентных магниточувствительных устройств, например, феррозонда или устройств, работающих на основе эффекта Холла, и измеряющих компоненты магнитного поля источника в нескольких точках одновременно. Сигналы с датчиков усиливаются и передаются в блок управления для решения задачи позиционирования [7].
Одна из основных проблем в «дальней» магнитной навигации – выделение полезного сигнала из атмосферных шумов. Основными источниками таких шумов служат грозовая активность атмосферы и распределенные радиопередатчики, в первую очередь линии электропередач. Атмосферные шумы содержат преобладающую горизонтальную компоненту магнитного поля, которая расположена в диапазоне частот 2–1000 Гц. Спектральная плотность шумов может достигать величины 0,05–0,07 мкА/м и падает с ростом частоты. Кроме шумов, точность вычисления координат ограничивают помехи от питающих сетей с частотами 50, 60, 400 Гц. В результате на частотах 3–4 кГц электромагнитная система позиционирования «дальней» навигации действует на расстоянии до 2 км [7].
В связи с проблемами точного определения погрешностей, перед разработчиками магнитных систем позиционирования встала задача: нужно было, чтобы система работала без дорогостоящей процедуры калибровки кабины (это особенно важно для вертолетов). Первое техническое решение, реализующее новый метод магнитного позиционирования, было опубликовано в октябре 1986 года [8]. Изменения коснулись в основном режима работы системы, тогда как состав магнитной системы позиционирования и вычислительные процедуры остались прежними. В новом методе вместо синусоидального магнитного поля генерируется последовательность импульсов с крутыми фронтами и плоской вершиной. Метод стали называть DC (системы позиционирования импульсного тока). Наличие плоской вершины у каждого импульса поля позволяет ждать затухания вихревых токов до начала измерений – в этом и есть основная идея этого метода. DC-метод дает возможность привязки магнитных систем позиционирования к борту летательного аппарата без картографирования кабины [9].
В импульсных системах магнитного позиционирования источник аналогичен источнику, применяемому в системе переменного тока, а датчик – применяемому в системе постоянного тока.
Работа системы происходит циклами, следующими друг за другом с частотой, определяемой необходимым темпом выдачи информации нашлемной системой целеуказания. Каждый цикл состоит из четырех подциклов: в течение первых трех последовательно на каждую из трех катушек источника подаются импульсы тока прямоугольной формы, а в течение четвертого источник полностью обесточивается. При этом вводится задержка на время затухания вихревых токов, возникающих в проводящих конструкциях кабины вследствие переходных процессов и искажающих сигнал на выходе системы [8].
Датчик в середине каждого подцикла производит измерение магнитного поля так же, как при работе системы постоянного поля. При этом за первые три подцикла измеряют компоненты магнитного поля источника с учетом поля помех, а за четвертый – только поле помех. Сигналы поступают в блок управления, где компоненты поля помех отделяются от полезных сигналов, после чего решается задача позиционирования
Вычислительный алгоритм DC-метода подразумевает, что магнитное поле Земли постоянно на всем цикле работы системы. Однако на движущихся объектах магнитное поле Земли быстро меняет ориентацию в системе координат летательного аппарата – оно непостоянно в период измерений. Для повышения точности компенсации поля Земли при высоких угловых скоростях производят экстраполяцию значений магнитного поля Земли, используя результаты его предыдущих измерений. Чтобы правильно передавать форму импульсного магнитного поля, измерительный канал DC-системы должен иметь полосу пропускания от нуля до нескольких (>5) частот следования импульсов, т.е. минимум до 1–2 кГц. В этом случае магнитные помехи с частотой бортовой сети питания 400 Гц попадают в полосу пропускания приемника и служат источниками дополнительной погрешности измерений. Для защиты от помех применяют синхронное детектирование. Измерения магнитного поля проводят дважды за период изменения напряжения питающей сети – сначала на положительной полуволне, а затем на отрицательной, ровно через полпериода [9]. Помеха при этом остается той же по модулю, но меняет знак, а полезный сигнал одинаков в обоих измерениях. Если теперь взять полусумму этих двух измерений, то влияние помехи исчезает [8]. Цифровая обработка сигналов также значительно повышает помехозащищенность DC-метода.
Кроме того в электромагнитной навигации можно пользоваться такой особенностью глобального магнитного поля Земли, как его «дипольный» характер. Это означает, что вектор градиента магнитного поля в отсутствие магнитных возмущающих тел имеет преимущественно вертикальное направление, незначительно изменяющееся в зависимости от широты. Это свойство представляется весьма важным, поскольку может служить основой для систем негравитационного представления вертикали. Еще большей привлекательностью для решения задач пеленгации и наведения обладает тензорный магнито-градиентометр, измеряющий компоненты тензора вектора индукции магнитного поля. Такой магнито-градиентометр позволяет не только строго определить направление на магнитный объект, но и направление его дипольного момента. Следует отметить, что в настоящее время средства магнитных измерений еще недостаточно точны и стабильны для использования в составе тензорного магнито-градиентометра, однако анализ тенденций развития показывает, что создание таких приборов возможно, а, следовательно, изучение и моделирование методов тензорных магнито-градиентных измерений важно для развития высокоточных систем обнаружения, пеленгации и наведения.
При применении электромагнитного поля в так называемой ближней навигации, системы электромагнитного позиционирования могут определять местоположение с чрезвычайно высокой точностью (около 1 мм и 0,2°) [7]. Недостатки – высокая стоимость, сильное влияние металлических предметов, а также короткий диапазон действия. Таким образом, магнитный метод позиционирования незаменим в медицине. Кроме того, он не требует прямой видимости между генератором поля и подвижным приемником. В медицине магнитный метод – вне конкуренции по возможностям позиционирования в закрытом трехмерном пространстве тела пациента. Точное положение инвазивного инструмента в трехмерном пространстве – необходимое условие многих современных медицинских процедур. Пример, иллюстрирующий требования к точности и надежности позиционирования – введение катетера в сердце. В медицине системы электромагнитного трекинга работают в относительно малой зоне: как правило, не более одного метра. Приемник таких систем позиционирования перемещают внутри тела пациента вместе с инвазивным инструментом. Чаще всего используют одноосные индукционные приемники. Электрическая пассивность такого приемника (отсутствие питающих токов и напряжений) – дополнительное преимущество для инвазивного применения. Генерирующие катушки размещают стационарно на разных расстояниях с минимальной симметрией. Типичная конфигурация содержит несколько групп двумерных излучателей (ортогональных катушек с общим центром) и одномерный приемник [7]. В последние годы возникло новое направление в медицинском применении магнитного позиционирования: в тело пациента внедряется пассивный маркер, который генерирует сигнал, позволяющий детектировать его присутствие и определять местоположение. Маркер представляет собой миниатюрный резонансный транспондер, возбуждаемый внешней системой, которая обнаруживает ответный сигнал маркера и вычисляет его координаты. Структура электромагнитной системы для хирургической навигации изображена на рисунке 2.
Рисунок 2 – Структура электромагнитной системы
для хирургической навигации
Еще одно применение электромагнитной навигации – технологии RFID (Radio Frequency IDentification, радиочастотная идентификация). Система контроля доступа обычно состоит из специализированного оборудования – контроллеров, промежуточных панелей, считывателей, карт доступа и исполнительных устройств, а также программного обеспечения, установленного на сервере. RFID системы могут быть пассивные и активные. При работе с пассивными RFID считыватель генерирует электромагнитное излучение определенной частоты, и при внесении карты в зону действия считывателя это излучение через встроенную в карте антенну питает чип карты. Получив необходимую энергию для работы, карта пересылает на считыватель свой идентификационный номер. Активные RFID работают от встроенного автономного источника питания – аккумулятора. Радиус действия считывателей RFID различен, в зависимости от типов от сантиметров до сотен метров. Любая RFID-система состоит из считывающего устройства (считыватель, ридер или интеррогатор) и транспондера (он же RFID-метка). Считывающее устройство содержит высокочастотный модуль (приемопередающее устройство), контроллер и элемент связи с транспондером. Кроме того, многие считывающие устройства также имеют дополнительный интерфейс, который служит для передачи данных другим компонентам системы. Транспондер является носителем данных и состоит из элемента связи и специализированной микросхемы [10].
Радиочастотные RFID устройства используют в качестве чувствительного элемента LC-контур, который настроен на резонансную частоту fр. Считывающее устройство (детектор) излучает переменное магнитное поле. Когда колебательный LC-контур оказывается под воздействием электромагнитного поля, в катушке индуктивности, согласно закону взаимной индукции, возникает ток с частотой, равной частоте магнитного поля. Если частота колебаний внешнего переменного магнитного поля равна резонансной частоте колебательного контура, то в LC-контуре возникают резонансные колебания. Возникающий в колебательном контуре ток пытается противодействовать вызвавшей его причине, то есть пытается уменьшить внешнее переменное магнитное поле. Это приводит к небольшому падению напряжения на антенне передатчика и, соответственно, к снижению измеренной интенсивности магнитного поля. Данный эффект можно заметить по падению индуцированного напряжения в специальной измерительной катушке, таким образом можно отследить появление резонансного контура в магнитном поле детектора [10].
RFID системы электромагнитного типа используют сильное магнитное поле в диапазоне низких частот – от 10 Гц, до 20 кГц. Транспондер содержит металлические полоски из магнитомягкого аморфного металла, у которого кривая гистерезиса имеет достаточно крутой наклон. В сильном переменном магнитном поле эти металлические полоски намагничиваются и переходят в состояние магнитного насыщения [10]. Благодаря сильной нелинейной зависимости плотности магнитной индукции B от напряженности внешнего магнитного поля H вблизи точки насыщения, а также скачкообразному изменению B вблизи перехода напряженности внешнего магнитного поля через 0 возникают гармоники основной частоты переменного внешнего магнитного поля, которые принимаются детектором и свидетельствуют о присутствии транспондера. Дальнейшая оптимизация электромагнитного способа заключается в том, что к основному сигналу добавляются гармоники с более высокой частотой. Благодаря высокой нелинейности кривой гистерезиса для металлических полосок возникают дополнительные гармоники с частотой, равной сумме и разности частот входящих сигналов. При этом детектор реагирует не только на гармоники основной частоты, но также и на сигналы, полученные в результате сложения и вычитания частот дополнительных сигналов [10].
Активное применение систем электромагнитного позиционирования также может открыть новую сферу, так называемую систему дополненной реальности (AR – augmented reality). Систему, объединяющую визуализацию синтезируемых изображений и позиционирование свободно перемещающихся пользователей [8].
AR-система особенно привлекательна для города, ведь она позволяет дополнительно обогащать реальную жизнь путем проецирования на «среду» пользователя информационных изображений. Перспектива развития этой области – увеличение масштабов зоны перемещения пользователя до сотен метров. А это организация полного позиционирования пользователя, включая линейное положение и ориентацию.
Типичная AR-система содержит несколько модулей. Видеокамера на голове пользователя предназначена для наблюдения за реальным миром. Проектор и полупрозрачный отражатель служат для формирования изображения непосредственно перед глазами пользователя [11]. Штора обеспечивает переход проектора из режима «immersive» (погружение) в режим «see-through» (смотрю насквозь). Система позиционирования также расположена на голове пользователя и жестко связана с видеокамерой и проектором. Вычислительное устройство может быть как стационарным, так и переносным в зависимости от решаемой задачи. При закрытии шторы на полупрозрачный отражатель попадает только изображение от видеокамеры. Когда штора открыта, наблюдать реальный мир можно непосредственно через отражатель [12]. Устройство позиционирования, определяет шесть координат (три линейных и три угла Эйлера) подвижной видеокамеры или головы пользователя в системе координат внешнего мира. В режиме свободного движения может использоваться подвижная система координат пользователя [11].
1.2 Датчики электромагнитного поля
Одним из главных компонент систем «магнитного зрения» являются датчики электромагнитного поля. Стоит отметить, что необходимая точность датчика обуславливается применением системы магнитного позиционирования.
1) Одно из наиболее широких распространений получили датчики работающие на основе эффекта Холла. Датчики магнитного поля на основе эффекта Холла обладают хорошей линейностью выходного сигнала и высокой чувствительностью к магнитным полям, приложенным перпендикулярно, вне зависимости от их плоскости. Конструктивно датчики Холла состоят из чувствительного элемента Холла, стабилизатора питания, схемы усиления сигнала и выходного каскада [13]. Параметры датчиков Холла приведены в таблице 1.
Таблица 1 – Параметры датчиков Холла
|
Минимальное разрешение, мкТл |
1-10 |
|
Число одновременно регистрирующих составляющих МП |
1-3 |
|
Динамический диапазон, мкТл |
100 |
|
Потребляемая мощность, мВт |
10-50 |
В целом датчики Холла обладают такими преимуществами как компактность, высокая надежность, широкий динамический диапазон, удовлетворительная магнитная чувствительность, хорошая ориентационная характеристика, широкий ценовой диапазон. За счет этих качеств, а также за счет широкого ассортимента на рынке, датчики Холла часто применяются в системах магнитного позиционирования объектов.
2) Другим типом датчиков являются магнитоиндуктивные сенсоры, которые представляют собой миниатюрную катушку индуктивности с ферромагнитным сердечником. Катушка содержит всего одну обмотку и регистрирует магнитное поле в направлении только одной из осей [13]. Магнитоиндуктивные датчики характеризуются компактностью и высокой надежностью, высокой магнитной чувствительностью, малой постоянной времени, хорошей ориентационной характеристикой. К недостаткам стоит отнести ограниченный динамический диапазон. Параметры магнитоиндуктивных сенсоров приведены в таблице 2.
Таблица 2 – Параметры магнитоиндуктивных датчиков
|
Минимальное разрешение, мкТл |
0,01-0,02 |
|
Число одновременно регистрирующих составляющих МП |
1 |
|
Динамический диапазон, мкТл |
(1-200) |
|
Потребляемая мощность, мВт |
1-5 |
3) В основе работы магниторезистивных датчиков лежит анизотропный магниторезистивный эффект, который заключается в способности длинной пермаллоевой (NiFe) пленки изменять свое сопротивление в зависимости от взаимной ориентации протекающего через нее тока и направления ее вектора намагниченности. В зависимости от угла между направлением тока и вектором намагниченности изменяется сопротивление пермаллоевой пленки. Под углом 90° оно минимально, угол 0° соответствует максимальному значению сопротивления. Для построения датчика четыре идентичные магниторезистивные пленки соединяются по мостовой схеме и образуют плечи моста. В конструкции датчика могут быть объединены несколько мостовых схем, образуя, таким образом, двух- и трехосевые сенсоры.
Магниторезистивные датчики обладают чрезвычной чувствительностью. Например, такие датчики компании Honeywell позволяют измерять чрезвычайно слабые магнитные поля (от 30 мТл) с последующим их преобразованием в выходное напряжение. Это обеспечивается за счет совмещения компенсационной и модулирующей катушки [14]. Также магниторезистивные датчики обладают компактностью, высокой надежностью, малой постоянной времени, хорошей ориентационной характеристикой, отсутствием зависимости от расстояния между магнитом и датчиком. Однако, как и магнитоиндуктивные датчики имеют ограниченный динамический диапазон. В таблице 3 приведены основные параметры магниторезистивных датчиков.
Сравнительно низкая стоимость, широкий выбор на рынке обуславливают их широкое применение в магнитометрии.
Таблица 3 – Параметры магниторезистивных датчиков
|
Минимальное разрешение, мкТл |
0,4-0,85 |
|
Число одновременно регистрирующих составляющих МП |
1-2 |
|
Динамический диапазон, мкТл |
(0,2-1) |
|
Потребляемая мощность, мВт |
30-90 |
4) Феррозондовый преобразователь магнитного поля, или феррозонд, предназначен для измерения и индикации постоянных и медленно меняющихся магнитных полей и их градиентов. Действие феррозонда основано на изменении магнитного состояния ферромагнетика под воздействием двух магнитных полей разных частот. В простейшем варианте феррозонд состоит из ферромагнитного сердечника и находящихся на нем двух катушек: катушки возбуждения, питаемой переменным током и измерительной (сигнальной) катушки. Сердечник феррозонда выполняется из материалов с высокой магнитной проницаемостью. На катушку возбуждения от специального генератора подается переменное напряжение с частотой от 1 до 300 кГц (в зависимости от уровня параметров и назначения прибора) [15]. В отсутствие измеряемого магнитного поля сердечник под действием переменного магнитного поля Н, создаваемого током в катушке возбуждения, перемагничивается по симметричному циклу. Изменение магнитного поля, вызванное перемагничиванием сердечника по симметричной кривой, индуцирует в сигнальной катушке ЭДС, изменяющуюся по гармоническому закону. Если одновременно на сердечник действует измеряемое постоянное или медленно меняющееся магнитное поле, то кривая перемагничивания меняет свои размеры и форму и становится несимметричной. При этом изменяется величина и гармонический состав ЭДС в сигнальной катушке. В частности, появляются четные гармонические составляющие ЭДС, величина которых пропорциональна напряженности измеряемого поля и которые отсутствуют при симметричном цикле перемагничивания [15].
Процедура юстировки преобразователя позволяет в достаточной для практики степени исключить влияние на выходной сигнал пространственную ориентацию преобразователя относительно силовых линий магнитного поля Земли. Кроме этого преобразователь располагают конструктивно на вращающейся оси с тем, чтобы под собственным весом он всегда занимал вертикальное положение относительно земной поверхности, что целесообразно по двум причинам: во-первых силовые магнитные линии природного поля направлены под углом 40 к поверхности Земли и градиент поля от вносимых ферромагнитными предметами искажений будет максимален при сближении направления природного поля с осью преобразователя, во-вторых такое естественное расположение преобразователя снижает погрешности от пространственных колебаний преобразователя [16]. Феррозондовый преобразователь является векторным прибором, т.е. выходной сигнал преобразователя зависит от величины и направления приложенного поля. Это позволяет получать дополнительную информацию об ориентации и размерах скрытого ферромагнитного объекта. Общие параметры феррозондовых преобразователей приведены в таблице 4.
Таблица 4 – Параметры феррозондовых преобразователей
|
Минимальное разрешение, мкТл |
0,0001-0,01 |
|
Число одновременно регистрирующих составляющих МП |
1 |
|
Динамический диапазон, мкТл |
0,1 |
|
Потребляемая мощность, млВт |
5-50 |
Однако у феррозондов есть свои недостатки, к которым относятся большие размеры, ограниченный динамический диапазон, невысокая механическая прочность, невозможность работы в условиях вибраций и тряски, значительная инерционность. Главным же недостатком является высокая стоимость и трудоемкость использования феррозондовых преобразователей магнитного поля.
5) Кроме феррозондовых металлодетекторов наибольшее распространение получили квантовые приборы, основанные на эффекте ядерного магнитного резонанса и эффекте Зеемана с оптической накачкой. В них реализованы более фундаментальные физические принципы, квантовые приборы обладают большей чувствительностью.
В классическом представлении свободные микрочастицы, обладающие как магнитным, так и механическим моментом, прецессируют в постоянном магнитном поле. Частота прецессии (частота Лармора) пропорциональна индукции магнитного поля В. Различают квантовые магнитометры со свободной и вынужденной ядерной прецессией. В магнитометре со свободной ядерной прецессией ампула с рабочим веществом (водой или другой протоносодержащей жидкостью) помещается в приемную катушку, которая включена в перестраиваемый по частоте колебательный контур. Вспомогательное постоянное магнитное поле, более сильное, чем измеряемое, поляризует рабочее вещество в перпендикулярном рабочему полю направлении [15].
После быстрого отключения вспомогательного магнитного поля моменты атомных ядер свободно прецессируют относительно направления измеряемого поля В с экспоненциально убывающей в течении 2–3 с амплитудой. При этом в приемной катушке наводится ЭДС с частотой прецессии (Лармора), которая измеряется частотомером. Чувствительность протонных металлодетекторов со свободной прецессией в слабых однородных полях порядка земного магнитного поля достигает 1 нТл [15].
В металлодетекторах с оптической накачкой рабочего вещества фиксируется частота высокочастотного генератора при ее совпадении с частотой инверсных квантовых переходов между подуровнями тонкого и сверхтонкого магнитного расщепления. Момент совпадения наблюдают по резонансному поглощению световой энергии, сопровождаемому рассеянием или преломлением света при его взаимодействии с атомами рабочего вещества. Чувствительность таких металлодетекторов достигает 10-13 Тл [15].
Существует еще класс сверхпроводящих магнитометров (металлодетекторов) основанных на эффекте Джозефсона. В качестве измерительного преобразователя в таких магнитометрах используется сверхпроводящие квантовые интерферометры (СКВИДы) постоянного или переменного тока. В магнитометрах со СКВИДом постоянного тока приращение внешнего магнитного потока преобразуется в осциллирующее напряжение на контактах чувствительного элемента: при измерении подсчитывается полное число осцилляций напряжения за время наложения потока. В магнитометрах со СКВИДом переменного тока осциллирующей функцией магнитного потока является полная индуктивность сверхпроводящего кольца и, следовательно, напряжение на связанном с ним высокочастотном колебательном контуре [17]. В сверхпроводящих магнитометрах достигнут рекордный уровень чувствительности 10-15 Тл на частотах 0-1 Гц [15].
Один из СКВИД–магнитометров разработан в Новосибирском государственном техническом университете. Он обладает чувствительностью 210-13 Тл. При этом условие сверхпроводимости чувствительного элемента обеспечивается жидким азотом, что с точки зрения эксплуатационных расходов гораздо выгоднее, чем охлаждение жидким гелием. Тем не менее, для полевых условий такой магнитометр неудобен из-за необходимости иметь запас жидкого азота, неизбежно испаряющегося из рабочего объема преобразователя [15].
Приведенные выше характеристики квантовых и феррозондовых магнитометров свидетельствуют о более высокой чувствительности квантовых приборов. Именно чувствительность является определяющим параметром при выборе оборудования для поиска. Особенно это важно, когда приходиться обследовать огромные площади морского дна на больших глубинах. Однако часто задача поиска имеет граничные условия по глубине поиска или существует возможность приблизить преобразователь к уровню вероятного залегания объекта, например, при поиске с поверхности воды на удлиняющем кабеле. В этом случае определяющим становится низкая цена, простота и надежность поискового прибора. Феррозондовые приборы обладают как раз этими несомненными достоинствами. Кроме этого рабочее вещество квантовых приборов имеет непродолжительный срок службы и часто небезопасно для окружающей среды, что удорожает эксплуатацию [14]. Все это объясняет применение феррозондовых поисковых приборов в вооруженных силах различных государств и появление новых модификаций приборов с феррозондовыми преобразователями.
Недостатком магнитометров со СКВИДом является необходимость поддержания условий сверхпроводимости в объеме чувствительного элемента с помощью жидкого гелия или азота. Это усложняет конструкцию прибора и делает неудобным эксплуатацию в полевых условиях.
Общим недостатком квантовых и сверхпроводящих магнитометров является их низкое быстродействие по сравнению с феррозондовыми магнитометрами, что может приводить к пропуску объектов поиска при быстром сканировании.
В настоящее время данный метод активно развивается. Предлагаются новые методы измерения трех компонент вектора магнитного поля, новые схемы измерения вариаций компонент магнитного поля, новые схемы измерений для реализации максимально чувствительного и одновременно точного и быстрого магнитометра [15].
1.3 Сравнение параметров коммерческих систем магнитного позиционирования
Лидерами в области электромагнитного трекинга являются фирмы Polhemus и Ascension. Проведем подробное сравнение двух электромагнитных трекеров: фирмы Polhemus – Fastrak и фирмы Ascension – Flock of Birds. В обеих системах передатчик состоит из трех ортогонально расположенных катушек, которые последовательно находятся под напряжением и создают электромагнитные поля для каждого измерительного цикла. Каждое поле производит сигнал в трех ортогональных датчиках, содержащихся в приемнике. Таким образом, каждый измерительный цикл состоит из, по меньшей мере, девяти измерений, из которых вычисляются шесть позиционных и ориентационных компонент. Их различия состоят в том, как создаются и обнаруживаются поля. На передатчик Fastrak подается синусоидальный ток, приемник содержит пассивные катушки, в которых индуцируются токи. Таким образом, Fastrak называют системой переменного тока. Эти системы позволяют измерять в реальном времени три линейных и три угловых координаты датчика в системе координат источника.
На передатчики Birds подаются прямоугольные импульсы постоянного тока. Система содержит передатчик, схему управления передатчиком, датчик и электронные средства для обработки сигнала. Передатчик обычно располагается на расстоянии в пределах от 0,4 м до 3,2 м от датчика (датчиков) [18]. Приемник состоит из ортогональных феррозондовых датчиков, которые измеряют поле. Схема управления передатчика обеспечивает контроль величины постоянного тока по каждой из излучающих антенн передатчика. Компьютер контролирует величину постоянного тока, которую обеспечивает схема управления для выдачи на излучающие антенны передатчика. Сигнал, выданный датчиком, направляется в электронный блок обработки сигнала. В нем происходит обработка и преобразование аналоговых сигналов датчика в цифровой формат и передача их в компьютер. Затем в соответствии с алгоритмом системы Flock of Birds рассчитываются линейные и угловые координаты датчика относительно системы координат передатчика, и полученная информация передается на основной компьютер пользователя.
Таким образом, Bird – это квази-DC система и, как следствие, способна создать три дополнительных пассивных измерения за цикл, с той целью, чтобы компенсировать постоянное магнитное поле Земли. Стоит отметить, что в системе Fastrak интервал, по которому возбуждается каждая катушка, фиксирован, в системе же Birds интервал изменяется пропорционально длительности цикла измерений. Перейдем к эксплуатационным характеристикам систем. Трекеры получают шесть выходных параметров, описывающих местоположение и ориентацию приемника по отношению к передатчику: три декартовы координаты – х, у, z, описывающих положение, а также три Эйлеровских угла, z (азимут), y (высота), а x (вращение) для описания ориентации. Матрица вращения 33 M, может использоваться для описания ориентации вместо углов Эйлера. Удобный способ выражения этих параметров с точки зрения приемника r-вектор [18]. Данная выражение описывает формула (1):
r = |x, y, z|T. (1)
Поскольку трекеры, работающие на основе электромагнитного поля, очень чувствительны к помехам от соседних источников поля, были проведены эксперименты для изучения влияния мешающих полей, присутствующих в типичной рабочей среде. Экспериментальная среда состояла из комнаты первого этажа в офисном здании, с флуоресцентным освещением, компьютером и мелкими электроприборами под напряжением. Передатчик и приемник трекера были расположены на неметаллической скамейке на расстоянии 1 метр от пола и по крайней мере 2 метра от стен и других устройств. Таким образом, ожидалось, что главным источником будут распределительные сети и близлежащий монитор компьютера. Были определены отношения индуцированного шума от питающей сети, их влияние на измерения и частоты трекера, при этом трекер работал на широком диапазоне частоты, включая частоту внешней. Кроме того исследованы относительные преимущества синхронизации с вертикальной частотой обновления вблизи монитора компьютера, по сравнению даже с сетью синхронной выборки, и зависимость от монитора-приемника отделение, была исследована. Также рассмотрены ошибки, возникающие при близком расположении передатчика трекера и приемника [18].
Наиболее распространенным источником электромагнитных помех в офисе является, скорее всего, поле, порождаемое сетью питающей. Для того чтобы исследовать этот эффект, передатчик и приемник были жестко зафиксированы на расстоянии 600 мм. Fastrak и Birds имеют совершенно разные «уязвимые места» к внешнему полевому вмешательству. Причина в том, что Fastrak – система переменного тока с однокилогерцевой полосой пропускания, сосредоточенной в 8, 10, 12, или 14 кГц, тогда как Birds – система с квази-DС полосой пропускания, нижний предел которой доходит почти до постоянных значений. В условиях эксперимента, когда внешние поля главным образом происходят от электрической сети, система Flock of Birds более сильно реагировала, чем система Fastrak, которая показывала очень низкие значения шума в присутствии полей окружающей сети, независимо от частоты. В таких случаях необходимо калибровать трекер, увеличивать рабочую частоту таким образом, чтобы она была минимум в 2 раза больше частоты помех. Однако, так как частота сети не постоянная, возможны случаи, когда сверхнизкочастотные «шумы» образуют вторую гармонику. Необходимо также отметить, что расстояние 600 мм было выбрано, как типичное, в случаях более близкого расположения передатчика и приемника шумы будут существенно ниже [18].
В случае с опытом о влиянии ЭЛТ монитора на показания трекеров, монитор работал на частоте кадровой развертки 70 Гц. В этом случае большее влияние оказывалось на систему Fastrak [18].
В таблице 5 проводится сравнение параметров коммерческих систем ЭМ навигации.
Таблица 5 – Сравнение параметров систем магнитного позиционирования
|
Фирма |
Тип |
Точность |
Зона перемещений, мм |
Частота, Гц |
|
Ascension |
pciBIRD |
±1 мм, ±0,15° |
203–762 |
до 105 |
|
pcBIRD |
±1,8 мм, ±0,5° |
203–3050 |
до 144 |
|
|
miniBIRD |
±1,8 мм, ±0,5° |
203–762 |
до 120 |
|
|
microBIRD |
±1,4 мм, ±0,5° |
203–580 |
до 90 |
|
|
Flock of Birds |
±1,8 мм, ±0,5° |
203–3050 |
до 144 |
|
|
Neste of Birds |
±1,8 мм, ±0,5° |
203–3050 |
до 105 |
|
|
Motion Star |
±8 мм, ±0,5° до 1500 мм, ±15 мм, ±1° до 3000 мм |
203–3050 |
до 100 |
|
|
Polhemus |
FASTRAK |
±0,8 мм, ±0,15° |
762 |
до 120 |
|
LIBERTY |
±0,8 мм, ±0,15° |
900 |
240 |
|
|
PATRIOT |
±2,5 мм, ±0,75° |
1067 |
60 |
Все перечисленные магнитные системы позиционирования имеют следующие диапазоны углов Эйлера: азимут – ±180°, угол места – ±90°, крен – ±180°. Зона перемещений для всех систем определяется длиной радиуса, проведенного из центра генератора поля в любом направлении. Частота обновления информации дается на один датчик, обслуживаемый одним вычислительным устройством. Точность позиционирования для всех систем дается в статике, при постоянной ориентации, в чистом окружении. Для импульсных систем точность определена в диапазоне дальностей 203–762 мм (кроме Motion Star). Видно, что статическая точность позиционирования в свободном пространстве для большинства систем магнитного позиционирования не превышает ±0,5° при дальности в диапазоне 0,2–0,7 м [19].
Недостатком коммерческих электромагнитных систем трекинга является чувствительность к искажениям сигнала вследствие взаимодействия магнитного поля с окружающими металлическими конструкциями. При любых изменениях магнитного поля, создаваемого передатчиком, во всех близлежащих металлических деталях наводятся вихревые токи, которые образуют вторичные магнитные поля, искажающие первичное поле передатчика. Искажения, создаваемые вихревыми токами, пропорциональны скорости изменения поля передатчика. В системах постоянного тока могут быть приняты меры для уменьшения мощности излучения на высоких частотах, поэтому присущие им искажения в десятки раз меньше, чем в системах переменного тока. Для учета искажений в рабочем объеме перемещений головы должна проводиться процедура картирования результирующего магнитного поля (Mapping), определяющая распределение систематических ошибок системы. Полученное в результате картирования поле ошибок заносится в память системы и используется для коррекции искажений в реальном времени.
К достоинствам электромагнитных систем следует отнести:
1) достаточно высокое быстродействие;
2) возможность измерения угловых координат головы в практически неограниченных диапазонах углов (±180°);
3) весьма небольшие размеры и масса нашлемных приемников.
-
Методика измерений
- Выбор и расчет катушек индуктивности как компонентов системы электромагнитного позиционирования
Основными компонентами в большинстве систем электромагнитного трекинга являются катушки индуктивности. В процессе выполнения дипломной работы были рассчитаны параметры двух катушек и рассчитано их влияние друг на друга, в условиях парной работы. Использовались две идентичные катушки ПМЕ-211 без сердечника с числом витков W=2700 и их диаметром d=0,23 мм.
Первоначальные измерения проводились на вольтметре В7-38. Величина сопротивления катушек L1 и L2. R1=132,4 Ом, R2=129,1 Ом. При этом погрешность прибора составляла ± 0,05 %.
Дальнейшие измерения происходили на импедансметре BM-507. Была установлена индуктивность катушек. Z1=14,8 мГн, Z2=15 мГн. Далее на импедансметре была определена зависимость полного сопротивления от частоты. Учет частоты особенно важен, так как в системах электромагнитного позиционирования часто применяются низкие частоты, которые обладают нужными свойствами, описанными выше. Измерения проходили с катушкой 1 и производились в нескольких частотных диапазонах, которые в сумме составляют необходимый график зависимости. График показан на рисунке 3.
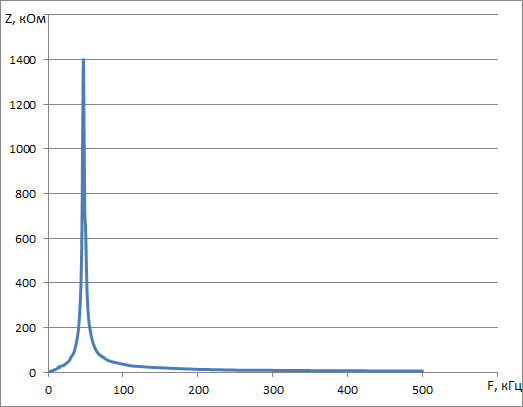
Рисунок 3 – Зависимость импеданса от частоты
Как видно из графика в диапазоне частот 47 –49 кГц наблюдается резкий скачок комплексного сопротивления - резонанс. Стоит отметить, что погрешность в измерениях различна для разных диапазонов частот и определятся половиной цены деления прибора (от =0,05 кГц при диапазоне F=0,8–3 кГц, до =5 кГц при диапазоне F=100–300 кГц).
После установления соответствующих параметров были произведены измерения взаимной индукции двух катушек по методу амперметра – вольтметра. Схема измерения показана на рисунке 4.
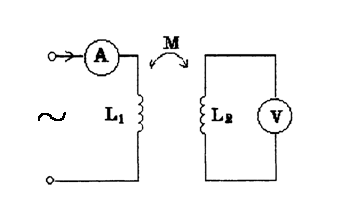
Рисунок 4 – Схемы измерения взаимоиндукции катушек
методом амперметра – вольтметра
Для определения взаимной индуктивности катушек используется формула (2):
M = kL1 L2, (2)
где M – взаимная индукция двух катушек, Гн;
k – коэффициент связи;
L1 – индуктивность катушки 1;
L2 –индуктивность катушки 2.
Стоит отметить, что коэффициент связи k равен среднегеометрическому из отношения потока взаимной индукции ко всему потоку катушки. Коэффициент связи всегда ниже 1, возрастает с уменьшением потоков рассеяния катушек Ф1 и Ф2.
Измерения производились при расстоянии между катушками r=10 мм, частоте F=5 кГц, согласном включении, по формуле (3)
M = /IF, (3)
где M – взаимная индукция двух катушек, Гн;
– ЭДС индукции, В;
I – ток, мА;
F – частота, кГц.
Были получены следующие результаты: I = 4,88 мА, = 0,5 В, M = 0,02 Гн. В дальнейшем были произведены измерения, при которых расстояние между катушками и их положение не менялось, но варьировалась частота F. По результатам измерений был создан график зависимости взаимной индукции от частоты, который показан на рисунке 5.
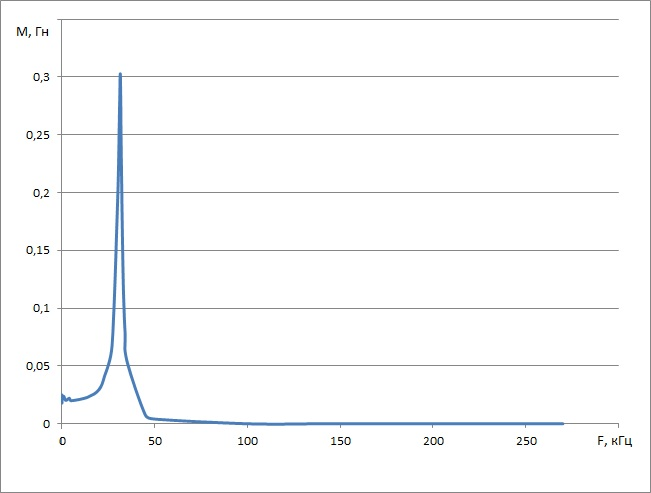
Рисунок 5 – Зависимость взаимной индукции двух катушек от частоты
- Измерение индукции электромагнитного поля в условиях парной работы катушек индуктивности
Для измерения индукции переменного магнитного поля использовался прибор П3-80, который входит в состав комплекса ЭКОФИЗИКА-110А. Прибор работал в режиме П3-80-H400, при котором измеряются текущие, максимальные и минимальные среднеквадратичные значения индукции переменных магнитных полей в 27 полосах в диапазоне от 25 до 675 Гц.
При измерениях напряженности электрического или магнитного поля преобразователь П3-80-ЕН400 помещается в исследуемую точку. Прибор производит измерение компоненты вектора напряженности, перпендикулярной плоскости антенны. В таблице 6 указаны пределы допускаемой относительной погрешности измерения напряженности электрического и магнитного поля на опорных частотах.
Таблица 6 – Пределы допускаемой относительной погрешности измерения напряженности электрического и магнитного поля на опорных частотах
|
Режим индикации |
Режим фильтрации |
Опорная частота |
Напряженность электрического поля |
Погреш ность |
Напряженность магнитного поля |
Погреш ность |
|
(П3-80-Н400) |
5-2000 РЕЖ: 50 Гц |
75 Гц |
2,0 В/м - 1,5 кВ/м |
± 15 % |
200 мА/м – 100 А/м 100 мА/м – 100 А/м |
± 10 % ± 15 % |
|
5-2000 Гц |
50 Гц |
0,2-1,0 А/м 1 А/м - 1,8 кА/м |
± 20 % ± 15 % |
|||
|
5-2000 Гц |
75 Гц |
2,0 В/м - 1,5 кВ/м |
± 15 % |
500 мА/м - 100 А/м 200 мА/м - 100 А/м |
± 10 % ± 15 % |
|
|
10-30 кГц |
20 кГц |
100 мВ/м - 0,5 кВ/м |
± 10 % |
5 мА/м - 100 А/м |
± 10 % |
|
|
2-400 кГц |
20 кГц |
100 мВ/м - 20 В/м |
± 15 % |
10,0 мА/м - 20 А/м |
± 10 % |
Каждая катушка была подсоединена к генератору, катушка L1 к генератору Г3-118, катушка L2 к генератору Г3-112. При измерении влияния электромагнитного поля катушек индуктивности на генераторах была выставлена необходимая частота, а также контролировалась величина силы тока. Катушки находились на определенном расстоянии друг от друга, соосно. Общая схема эксперимента показана на рисунке 6.
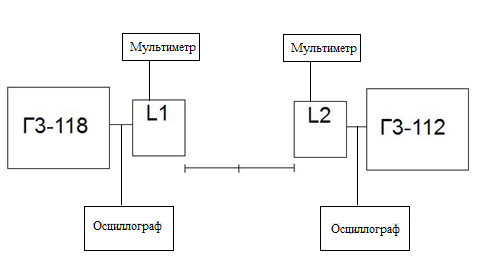
Рисунок 6 – Схема эксперимента измерения магнитной индукции при парной работе катушек индуктивности
Антенна прибора П3-80 помещалась в пространство между катушками индуктивности и от катушки L2 перемещалась в направлении катушки L1 с шагом 1 см. Измеритель поля был настроен на соответствующую частоту.
3 Результаты измерений
3.1 Измерение зависимости магнитной индукции от расстояния при одинаковой частоте работы катушек индуктивности
Антенна измерительного прибора П3-80 помещалась в пространство между катушками индуктивности и от катушки L2 перемещалась в направлении катушки L1.
В первом случае катушки находились на расстоянии 10 см. Частота генераторов установлена на значении 150 Гц. Прибор фиксировал значения на расстоянии от 1 см до 9 см с шагом 1 см. В результате измерения индукции переменного магнитного поля в условиях парной работы катушек индуктивности были получены данные и построен график, который показан на рисунке 7. Погрешность измерений составила ± 10 % согласно документации прибора.
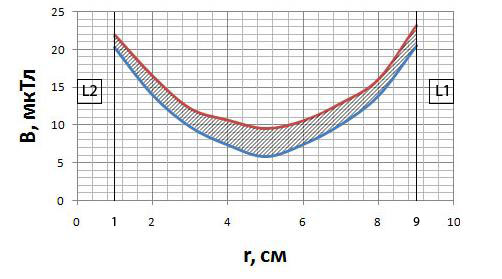
Рисунок 7 – Зависимость магнитной индукции от расстояния
при парной работе катушек
Как видно из графика в ходе измерений возникали колебания показаний прибора, что обусловлено работой катушек на одной частоте. Такие колебания называются биениями. Биения описываются формулой (4):
yрез = 2Ym cos((1 - 2)/2)t) cos((1 + 2)/2)t), (4)
где 1 – частота колебаний 1;
2 – частота колебаний 2;
Ym – амплитуда обоих колебаний;
yрез – отклонение, отвечающее результирующим колебаниям;
t – время.
По мере движения от одной катушке ко второй, величина биений изменялась. Величина биений указана в таблице 7.
Таблица 7 – Зависимость величины биений от расстояния
|
r, см |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Величина биений, мкТл |
1,69 |
2,5 |
2,37 |
3,22 |
3,65 |
3,06 |
2,76 |
2,15 |
2,38 |
Как видно из таблицы, максимальные показания биений получены в зоне равноудаленности катушек – на расстоянии 5 см.
Верхняя и нижняя огибающие имеют форму параболы. Для обеих огибающих производилась аппроксимация методом наименьших квадратов с помощью полинома степени 2. Для верхней огибающей:
y = 0,8038x2 - 7,9573x + 29,142;
R = 0,9932.
Для нижней огибающей:
y = 0,8752x2 - 8,7292x + 28,068;
R = 0,9978.
Погрешность аппроксимации для верхней огибающей составила 0,68 %, для нижней огибающей 0,22 %.
Далее катушки были приближены друг к другу и были проведены измерения индукции переменного магнитного поля в условиях парной работы катушек индуктивности на расстоянии 6 см друг от друга. Частота генераторов не изменялась и составила 150 Гц. Прибор фиксировал значения на расстоянии от 1 см до 5 см с шагом 1 см. По результатам измерений был построен график, который показан на рисунке 8. Погрешность измерений составила ± 10 % согласно документации прибора.
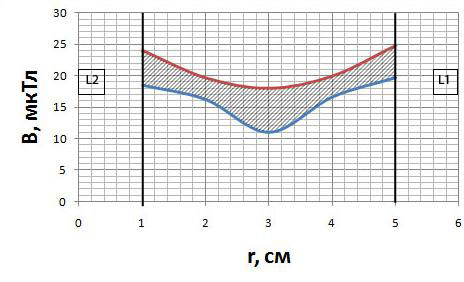
Рисунок 8 – Зависимость магнитной индукции от расстояния при парной работе катушек
Как видно из графика разброс флуктуаций увеличился, а в зоне равноудаленности антенны измерительного прибора от катушек наблюдается «провал» – нижняя огибающая в этой зоне имеет колоколообразную форму. Величина биений указана в таблице 8.
Таблица 8 – Зависимость величины биений от расстояния
|
r, см |
1 |
2 |
3 |
4 |
5 |
|
Величина биений, мкТл |
5,52 |
3,44 |
6,97 |
3,33 |
5,08 |
Максимальные значения флуктуации, как и в первом эксперименте, проявляются в зоне равноудаленности катушек.
Для верхней огибающей производилась аппроксимация методом наименьших квадратов с помощью полинома степени 3:
y = 0,0333x3 + 1,2271x2 – 8,0962x + 25,74;
R = 0,7639.
Погрешность аппроксимации в этом случае составила 23,61 %.
В третьем случае расстояние между катушками индуктивности было увеличено до 14 см и были проведены измерения индукции переменного магнитного поля. Частота генераторов не изменялась и составила 150 Гц. Прибор фиксировал значения на расстоянии от 1 см до 13 см с шагом 1 см. По результатам измерений был построен график, который показан на рисунке 9. Погрешность измерений составила ± 10 % согласно документации прибора.
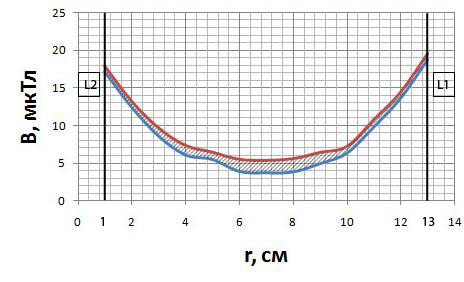
Рисунок 9 – Зависимость магнитной индукции от расстояния
при парной работе катушек
В таблице 9 указана величина флуктуации индукции переменного магнитного поля.
Таблица 9 – Зависимость величины биений от расстояния
|
r, см |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
|
Величина биений, мкТл |
0,67 |
0,76 |
1,07 |
0,97 |
1,63 |
1,67 |
1,78 |
1,51 |
0,88 |
0,95 |
0,76 |
0,73 |
Из графика и таблицы видно, что на расстоянии 14 см между катушками средняя величина биений существенно снизилась. При этом максимальные значения биений получены в зоне равноудаленности катушек – на расстоянии 6-9 см.
Верхняя и нижняя огибающие имеют форму параболы. Для обеих огибающих производилась аппроксимация методом наименьших квадратов с помощью полинома степени 2. Для верхней огибающей:
y = 0,3727x2 - 5,1106x + 22,27;
R = 0,9864.
Для нижней огибающей:
y = 0,3986x2 - 5,472x + 22,044;
R = 0,9914.
Величина погрешности аппроксимации для верхней огибающей составила 1,36 %, для нижней огибающей 0,86 %.
В результате измерений на одной частоте (150 Гц) видно, что при приближении катушек друг к другу величина биений увеличивается. Так, при приближении катушек с расстояния 10 см на расстояние 6 см разброс флуктуации увеличивается почти в 2 раза. Кроме того, форма нижней огибающей изменяется от параболической к колоколообразной. Как в случае цифровых, так и в случае аналоговых систем, все это может привести к получению недостоверной информации. Увеличение расстояния между катушками с 10 см до 14 см, напротив, уменьшает величину биений почти в 3 раза.
Для определения зависимости величины флуктуаций от частоты, частота обоих генераторов была повышена до 500 Гц. Антенна измерительного прибора П3-80 помещалась в пространство между катушками индуктивности и от катушки L2 перемещалась в направлении катушки L1.
Катушки находились на расстоянии 10 см. Прибор фиксировал значения на расстоянии от 1 см до 9 см с шагом 1 см. В результате измерения индукции переменного магнитного поля были получены данные и построен график, который показан на рисунке 10. Погрешность измерений составила ± 10 % согласно документации прибора.
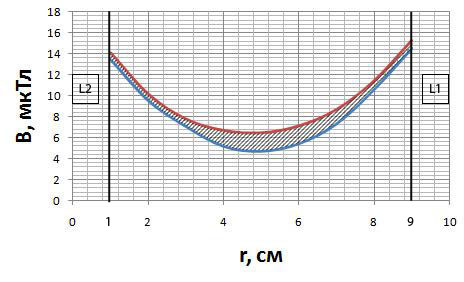
Рисунок 10 – Зависимость магнитной индукции от расстояния при парной работе катушек
Зависимость биений от положения измерительной антенны при удаленности катушек на 10 см указана в таблице 10.
Таблица 10 – Зависимость величины биений от расстояния
|
r, см |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
|
Величина биений, мкТл |
0,68 |
0,66 |
0,74 |
1,56 |
1,8 |
1,74 |
1,4 |
0,86 |
0,81 |
Как видно из таблицы, максимальные показания биений получены в зоне равноудаленности катушек – на расстоянии 5 см. Сравнивая таблицу 10 с таблицей 7, видно, что биения при повышении частоты уменьшились. Максимальные значения биений уменьшились в 2 раза, а минимальные более чем в 2,5 раза.
Верхняя и нижняя огибающие имеют форму параболы. Для обеих огибающих производилась аппроксимация методом наименьших квадратов с помощью полинома степени 2. Для верхней огибающей:
y = 0,5173x2 - 4,9967x + 18,377
R = 0,9973
Для нижней огибающей:
y = 0,5788x2 - 5,6558x + 18,584;
R = 0,9988.
Величина погрешности аппроксимации для верхней огибающей составила 0,27 %, для нижней огибающей 0,12 %.
Затем катушки были приближены друг к другу и были проведены измерения индукции переменного магнитного поля в условиях парной работы катушек на расстоянии 6 см. Частота генераторов не изменялась и составила 500 Гц. Прибор фиксировал значения на расстоянии от 1 см до 5 см с шагом 1 см. По результатам измерений был построен график, который показан на рисунке 11. Погрешность измерений составила ± 10 % согласно документации прибора.
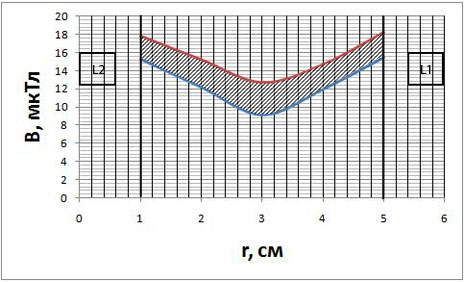
Рисунок 11 – Зависимость магнитной индукции от расстояния при парной работе катушек
Зависимость биений от расположения антенны между катушками индуктивности показана на таблице 11.
Таблица 11 – Зависимость величины биений от расстояния
|
r, см |
1 |
2 |
3 |
4 |
5 |
|
Величина биений, мкТл |
2,48 |
3,01 |
3,58 |
2,70 |
2,69 |
Сравнивая график 11 с графиком 8, видно, что при повышении частоты уменьшился разброс флуктуаций, при этом нижняя огибающая имеет характерную параболическую форму, вследствие чего «провал», который виден на графике 8, отсутствует.
Верхняя и нижняя огибающие имеют форму параболы. Для обеих огибающих производилась аппроксимация методом наименьших квадратов с помощью полинома степени 2. Для верхней огибающей:
y = 1,1864x2 - 7,0876x + 23,928
R = 0,9536
Для нижней огибающей:
y = 1,3671x2 - 8,1829x + 22,334;
R = 0,936.
Величина погрешности аппроксимации для верхней огибающей составила 5,64 %, для нижней огибающей 7,4 %.
Далее катушки индуктивности располагались на расстоянии 14 см и производились измерения индукции переменного магнитного поля. Частота генераторов не изменялась и составила 500 Гц. Прибор фиксировал значения на расстоянии от 1 см до 13 см с шагом 1 см. По результатам измерений был построен график, который показан на рисунке 12. Погрешность измерений составила ± 10 % согласно документации прибора.
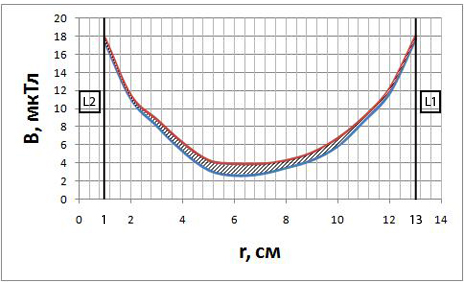
Рисунок 12 – Зависимость магнитной индукции от расстояния при парной работе катушек
Зависимость биений от положения измерительной антенны при удаленности катушек на 14 см указана в таблице 12
Таблица 12 – Зависимость величины биений от расстояния
|
r, см |
1 |
2 |
3 |
4 |
5 |
6 |
7 |
8 |
9 |
10 |
11 |
12 |
13 |
|
Величина биений, мкТл |
0,45 |
0,33 |
0,67 |
1,03 |
1,24 |
1,05 |
0,76 |
0,77 |
0,83 |
0,42 |
0,49 |
0,32 |
Сравнивая график 12 с графиком 9, видно, что при повышении частоты до 500 Гц биения уменьшились. Максимальные показания биений получены в зоне равноудаленности катушек – на расстоянии 6-7 см. Максимальные значения биений уменьшились в 1,5 раза, а минимальные в 2 раза.
Верхняя и нижняя огибающие имеют форму параболы. Для обеих огибающих производилась аппроксимация методом наименьших квадратов с помощью полинома степени 2. Для верхней огибающей:
y = 0,3837x2 - 5,315x + 21,624;
R = 0,9831.
Для нижней огибающей:
y = 0,4033x2 - 5,577x + 21,514;
R = 0,9865.
Величина погрешности аппроксимации для верхней огибающей составила 2,69 %, для нижней огибающей 2,135 %.
В результате измерений магнитной индукции при парной работе катушек на одной частоте (500 Гц) было установлено, что разброс флуктуации уменьшился. Кроме того, при работе катушек на расстоянии 6 см форма нижней огибающей имеет параболическую форму, в отличие от эксперимента на частоте 150 Гц.
3.2 Измерение зависимости магнитной индукции от расстояния при разной частоте работы катушек индуктивности
Катушка L1 была подсоединена к генератору Г3-118, на котором была установлена частота 300 Гц, катушка L2 к генератору Г3-112, частота работы которого была 400 Гц.
Антенна измерительного прибора П3-80 помещалась в пространство между катушками индуктивности и от катушки L2 перемещалась в направлении катушки L1. Фиксировались значения магнитной индукции на двух частотах – 300 Гц и 400 Гц.
В первом случае катушки находились на расстоянии 10 см. Прибор фиксировал значения на расстоянии от 1 см до 9 см с шагом 1 см. В результате измерения индукции переменного магнитного поля в условиях парной работы катушек индуктивности были получены данные и построен график, который показан на рисунке 13. Погрешность измерений составила ± 10 % согласно документации прибора.
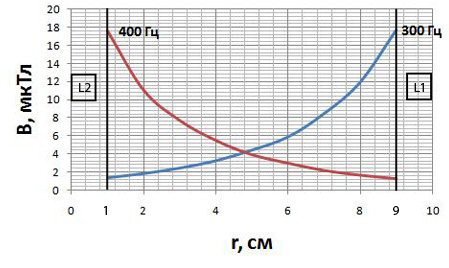
Рисунок 13 – Зависимость магнитной индукции от расстояния при парной работе катушек
Как видно из графика флуктуации при работе катушек на разных частотах полностью отсутствуют.
Для обоих графиков, указанных на рисунке 13, производилась аппроксимация методом наименьших квадратов с помощью полинома степени 2. Для графика показаний на частоте 300 Гц:
y = 0,3244x2 - 1,406x + 3,1124;
R = 0,9857.
Для графика показаний на частоте 400 Гц:
y = 0,3397x2 - 5,1741x + 21,091;
R = 0,9764.
Величина погрешности аппроксимации для графика показаний на частоте 300 Гц составила 2,43 %, для графика показаний на частоте 400 Гц: 2,36 %.
Далее катушки находились на расстоянии 6 см. Прибор фиксировал значения на расстоянии от 1 см до 5 см с шагом 1 см. В результате измерения индукции переменного магнитного поля в условиях парной работы катушек индуктивности были получены данные и построен график, который показан на рисунке 14. Погрешность измерений составила ± 10 % согласно документации прибора.

Рисунок 14 – Зависимость магнитной индукции от расстояния при парной работе катушек
Из графика 14 видно, что биения полностью отсутствуют, графики симметричные. В области равноудаленности катушек отклонения не наблюдаются.
Для обоих графиков, указанных на рисунке 14, производилась аппроксимация методом наименьших квадратов с помощью полинома степени 2. Для графика показаний на частоте 300 Гц:
y = 0,55x2 - 6,322x + 21,828;
R = 0,9974.
Для графика показаний на частоте 400 Гц:
y = 0,6907x2 - 1,1953x + 4,714;
R = 0,9943.
Величина погрешности аппроксимации для графика показаний на частоте 300 Гц составила 0,26 %, для графика показаний на частоте 400 Гц: 0,57 %.
Затем катушки были отдалены друг от друга на расстояние 14 см. Прибор фиксировал значения на расстоянии от 1 см до 13 см с шагом 1 см. В результате измерения индукции переменного магнитного поля в условиях парной работы катушек индуктивности были получены данные и построен график, который показан на рисунке 15. Погрешность измерений составила ± 10 % согласно документации прибора.
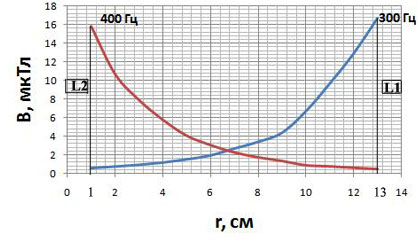
Рисунок 15 – Зависимость магнитной индукции от расстояния при парной работе катушек
Из графика 15 видно, что биения полностью отсутствуют, графики симметричные. В области равноудаленности катушек отклонения не наблюдаются.
Для обоих графиков, указанных на рисунке 15, производилась аппроксимация методом наименьших квадратов с помощью полинома степени 2. Для графика показаний на частоте 300 Гц:
y = 0,174x2 - 1,241x + 2,5597;
R = 0,9822.
Для графика показаний на частоте 400 Гц:
y = 0,1597x2 - 3,296x + 17,283;
R = 0,97.
Величина погрешности аппроксимации для графика показаний на частоте 300 Гц составила 1,78 %, для графика показаний на частоте 400 Гц: 3 %.
По результатам всех измерений можно сделать выводы:
- Для того, чтобы уменьшить разброс флуктуации при работе катушек на одной частоте необходимо увеличивать частоту генераторов. Так, при увеличении частоты генераторов со 150 Гц, до 500 Гц величина биений уменьшается в 2 раза и более. При этом все графики имеют параболическую форму.
В случае, если возможность для увеличения частоты отсутствует, либо противоречит условиям работы системы, для того чтобы избежать потери информации необходимо размещать источники на расстоянии не менее 10 см, либо применять автоматическую регулировку усиления (АРУ).
- Для того чтобы полностью избавиться от эффекта биений, следует изменять частоту работы одной из катушек. При работе катушек на частотах 300 и 400 Гц биения полностью отсутствуют, графики имеют симметричный вид.
ЗАКЛЮЧЕНИЕ
Основные результаты дипломной работы состоят в следующем:
1 Рассчитаны катушки индуктивности, определены зависимости импеданса и взаимной индукции двух катушек от частоты.
2 Произведен расчет влияния индукции магнитного поля в условиях парной работы катушек индуктивности на одной частоте, в зависимости от расстояния. Построены графики. Выявлены зависимости в разбросе флуктуаций, показаны пути решения проблемы биений.
3 Произведен расчет влияния индукции магнитного поля в условиях парной работы катушек индуктивности на разных частотах. Построены графики. Показана разница в функционировании системы, которая работает на разных частотах, и на одной частоте. Данные полученные в результате исследований необходимо учитывать при разработке сверхнизкочастотных RFID-систем.
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
- Радиогеодезические и электрооптические измерения / В. Д. Большаков, Ф. Деймлих, А. Н. Голубев, В. П. Васильев – М.: Недра, 2004. – 303 с.
- Волковицкий А. К. Измерение относительного положения тел в магнитном поле / А. К. Волковицкий, Е. В. Каршаков // Управление в технических, эргатических, организационных и сетевых системах – УТЭОСС-2012: материалы конф., 9–11 окт. 2012 г. – Санкт-петербург, 2012. – C. 642.
- Новый метод позиционирования бурильного инструмента, основанный на отечественной магнитной технологии / М. В. Желамский, Ю. Т. Морозов, А. Г. Калинин, и др. // Инженер – нефтяник. – 2009. – № 3. – С. 3–8.
- Павлов Б. В. Низкочастотная электромагнитная система относительной навигации и ориентации / Б. В. Павлов, А. К. Волковицкий., Е. В. Каршаков // Гироскопия и навигация. – 2010. – № 1 (68). – С. 3–15.
- Желамский М. В. Первая отечественная система магнитного позиционирования / М. В. Желамский // Датчики и системы. – 2009. – № 1. – С. 2–7.
- Желамский М. В. Магнитное позиционирование в нашлемных системах / М. В. Желамский // Электроника: НТБ. – 2007. – № 1. – С. 86–87.
- Желамский М. В. Электромагнитное позиционирование – преимущества и области применения / М. В. Желамский // Электроника: НТБ. – 2007. – № 3. – С. 96–101.
- Желамский М. В. Магнитное позиционирование в системах виртуальной и дополненной реальности / М. В. Желамский // Электроника: НТБ. – 2007. – № 5. – С. 64–68.
- Krzysztof W., Kolodziej. Local Positioning Systems LBS Applications and Services / Krzysztof W., Kolodziej, J. Hjelm // by Taylor & Francis Group, LLC. – 2009. – 127 p.
- Финкенцеллер К. RFID-технологии / К. Финкенцеллер. – М.: Додэка-XXI, 2010. – С. 50–61.
- Superior augmented reality registration by integrating landmark tracking and magnetic tracking. / State A., Hirota G., Chen D. T. et al. // Proceedings of SIGGRAPH 06: Computer Graphics Proceedings, Annual Conference Series., August 4-9. 2006. – New Orleans, LA, 2006. P. 429–438.
- Ghazisaedy M. Ultrasonic calibration of a magnetic tracker in a virtual reality space / M. Ghazisaedy, D. Adamczyk, D. Sandin – The University of Illinois at Chicago, Electronic Visualization Laboratory, 2004. – 25 p.
- Magnetoelectric Sensor of Magnetic Field / M. I. Bichurin, V. M. Petrov, R. V. Petrov et al. // Ferroelectrics. – 2002. – Vol. 280. – P. 199–202.
- Маргелов А. Г. Магниторезистивные датчики положения компании Honeywell / А. Г. Маргелов // Chip news. – 2005. – №2. – С. 52–56.
- Арбузов С. О. Магниточувствительные поисковые приборы / С. О. Арбузов // Специальная техника. – 2001. – № 6. – С. 31–39.
- Звежинский С. С. Метод магнитометрического обнаружения взрывоопасных предметов / С. С. Звежинский, И. В. Парфенцев // Спецтехника и связь. – 2008. – № 2. – С. 8–17.
- Budker D. . Optical Magnetometry. / D. Budker, M. Romalis // Nature Physics. – 2007. – Vol.3. – P. 227–234.
- Nixon M. The Effects of Metals and Interfering Fields on Electromagnetic Trackers Presence / M. Nixon, B. McCallum, W. Richard Fright // Presence. – 2004. Vol. 7. – № 3. – P. 204–218.
- Алферов Г. В. Информационные системы виртуальной реальности в мехатронике и робототехнике / Г. В. Алферов. – М.: Соло, 2006. – С. 117–120.
РАЗРАБОТКА ВЫЧИСЛИТЕЛЬНОГО БЛОКА СИСТЕМЫ ЭЛЕКТРОМАГНИТНОГО ПОЗИЦИОНИРОВАНИЯ