Лабораторный комплекс по исследование электромеханических систем
Министерство образования Российской Федерации
Владимирский государственный университет
Кафедра АиМс
Отчёт по производственной практике
Лабораторный комплекс по исследование электромеханических систем
.
Оглавление.
1. Назначение комплекса схемотехнического КСТ-4 стр. 4.
2. Состав комплекса стр. 4.
а) Панель управления стр. 4.
б) Плата цифро-аналоговых и аналого-цифровых
преобразователей (ЦАП и АЦП) стр. 7.
3. в) Плата функциональных аналоговых элементов стр. 7.
4. Устройство и работа комплекса стр. 9.
5. Функциональная схема стр. 10.
6. Панель управления стенда для исследования
электропривода стр. 11.
7. Моделирование привода стр. 14.
8. Методика измерения физических величин c
помощью КСТ-4 при экспериментах с
реальным объектом стр. 14.
9. Список используемой литературы стр.19.
1. Комплекс схемотехнический КСТ-4 может использоваться автономно, совместно с ЭВМ (типа IBM PC) и с внешними устройствами. В автономном режиме реализуется аналоговое моделирование схемотехнических устройств с применением встроенных усилительных, преобразовательных, силовых и измерительных устройств. ЭВМ может работать в управляющем и регистрирующем режимах с применением специализированного программ много обеспечения (программа ANSYS). В качестве внешнего устройства может использоваться реальный физический объект, имеющий аналоговый вход. При этом объект должен подключаться к клеммам на передней панели комплекса, выведенным параллельно нагрузке. Сигнал обратной связи, снимаемый с датчика объекта, может подаваться на входной сумматор, а также измеряться вольтметром и вводиться через АЦП в ЭВМ.
2. Комплекс содержит:
- панель управления для задания структурных связей моделируемого устройства;
- плату устройства связи с объектом (УСО);
- плату цифро-аналоговых и аналого-цифровых преобразователей (ЦАП и АЦП);
- набор аналоговых функциональных элементов.
а) Панель управления служит для задания структурных связей и параметров комплекса.
Панель управления (рис. 1) содержит следующие группы органов индикации и управления:
- переключатели, потенциометры и кнопки, с помощью которых задаются структура и параметры исследуемого электронного устройства;
- светодиоды индикации цифрового кода цифро-аналогового преобразователя, входящего в состав платы ЦАП и АЦП;
- средства измерения и индикации (вольтметр с переключателем входа, переключатель входа внешнего осциллографа, светодиоды индикации полярности сигнала, измеряемого вольтметром, измеритель тока).
При пользовании органами управления следует руководствоваться следующими общими правилами:
- соединение связей производится установкой соответствующих тумблеров в верхнее положение или установкой "клювиков" переключателей в сторону замыкания линии;
- увеличению коэффициентов передачи потенциометров соответствует вращение их ручек по часовой стрелке;
- контролируемые потенциометры снабжены кнопками, при нажатии на которые коэффициент передачи индицируется вольтметром
Элементы, представленные на лицевой панели, имеют следующие номинальные значения:
|
R1 = 8,2 кОм;
|
R2 = 100 кОм;
|
R3 = 1 МОм;
|
|
R4 = 25 кОм;
|
R5 = 1,1 МОм;
|
R6 = 1 МОм;
|
|
R7 = 51 кОм;
|
R8 = 1 МОм;
|
R9 = 51 кОм;
|
|
R10 = 51 кОм;
|
R11 = 102 кОм;
|
Rно = 1 кОм;
|
|
Rнд = 255 Ом;
|
Си = 1 мкФ;
|
Сво = 50 мкФ;
|
|
Свд = 2000 мкФ;
|
Сф = 50 мкФ.
|
|

б) Плата УСО совместно с платой ЦАП и АЦП обеспечивает связь комплекса с ПК при установке платы в свободный слот компьютера.
В УСО использован программно-управляемый ввод-вывод с условной передачей. При такой передаче до начала цикла обмена данными с ЭВМ осуществляется передача информации о состоянии УСО. ЭВМ непрерывно анализирует эту информацию. По окончании преобразования аналогового входного сигнала в цифровой код АЦП выдает стробирующий импульс, поступающий на триггер УСО, что говорит о готовности УСО к циклу обмена данными с ЭВМ. Данные от ЭВМ поступают в восьмиразрядный параллельный регистр, состояние которого высвечивается линейкой светодиодов на лицевой панели КСТ. Фиксирование данных от ЭВМ в регистре происходит при появлении управляющего сигнала с дешифратора адреса. Выходной сигнал регистра поступает на вход ЦАП, где преобразуется в аналоговый сигнал задающего воздействия. ЦАП имеет смещенную статическую характеристику, позволяющую обойтись без знакового разряда. Нулевому значению цифрового кода соответствует выходной сигнал ЦАП, равный – 10 В. Значению 127 соответствует нулевой выходной сигнал ЦАП, значению 255 - сигнал + 10 В. Вход АЦП может быть подключен к выходу комплекса или к любой промежуточной точке моделируемой схемы посредством переключателя вольтметра. В аналого-цифровом преобразователе производится преобразование аналогового сигнала управляемой величины в восьмиразрядный цифровой код, поступающий затем в ЭВМ. АЦП имеет смещенную статическую характеристику, обратную по отношению к характеристике ЦАП. Для согласования УСО с шиной ЭВМ предусмотрены шинный формирователь и буфер.
в) Плата функциональных аналоговых элементов включает в себя:
- задающее устройство;
- аналоговые сумматоры, реализованные на операционных усилителях DA1, DA3;
- интегрирующий элемент (DA2);
- функциональный генератор;
- переключаемый усилительно- нелинейный элемент (DA4);
- двуполярный усилитель мощности;
- выходной LC фильтр;
- нагрузочные резисторы Rно, Rнд;
- вольтметр;
- измеритель тока нагрузки.
Задающее устройство позволяет формировать двуполярный постоянный входной сигнал регулируемой амплитуды, принимать входной сигнал от ЦАП, или подавать на вход комплекса сигналы, генерируемые внешними источниками сигналов. Амплитуда задающего воздействия Uвх регулируется потенциометром Квх и устанавливается при подключении вольтметра к точке Uвх.
Аналоговые сумматоры, реализованные на операционных усилителях DA1, DA3 и интегрирующий элемент (DA2) позволяют реализовать регуляторы с пропорциональным и пропорционально-интегральным законами управления.
Функциональный генератор вырабатывает сигналы треугольной и синусоидальной формы в частотном диапазоне не уже 10 - 30000 Гц. Амплитуды сигналов имеет независимую регулировку.
Переключаемый усилительно-нелинейный элемент позволяет усиливать сигнал, коэффициент усиления устанавливается регулировкой Ку в верхнем положении тумблера местной обратной связи элемента или реализовать гистерезисную характеристику с регулируемой шириной петли гистерезиса (устанавливается регулировкой Ку в нижнем положении тумблера местной обратной связи элемента).
Двуполярный усилитель мощности содержит комплементарную пару транзисторов с управляемыми генераторами тока и источником смещающего напряжения Uсм. Нагрузка усилителя мощности может носить комплексный резистивно-индуктивно-емкостной характер и определяется положением тумблеров на панели управления.
Вольтметр с электронным переключением полярности позволяет измерять сигналы амплитудой до 10 В (что соответствует отклонению стрелки на полную шкалу). Следует иметь в виду, что показания вольтметра, присоединенного к контрольным точкам Uн, +Ев, -Ев следует умножать на 3.
Измеритель тока нагрузки (как внутренней, так и внешней) преобразует токовый сигнал в пропорциональный ему сигнал напряжения. 10 В выходного напряжения измерителя тока соответствуют 200 мА тока нагрузки.
3. Устройство и работа комплекса.
Комплекс КСТ-4 совместно со стендом для исследования системы автоматического управления двигателем постоянного тока (ДПТ) может работать в автономном режиме и режиме аналого-цифрового моделирования. При работе в автономном режиме производится моделирование систем управления электроприводом с двигателем постоянного тока при использовании встроенных усилительных, преобразовательных, силовых и измерительных элементов КСТ-4. Задание структуры и параметров при моделировании осуществляется тумблерами, переключателями и потенциометрами на панели управления КСТ-4.
При аналого-цифровом моделировании компьютер может работать в управляющем и регистрирующем режимах с применением специализированного программного обеспечения (ANSYS). Ввод информации в компьютер может осуществляться как с выхода моделируемого привода, так и с промежуточных контрольных точек КСТ-4.
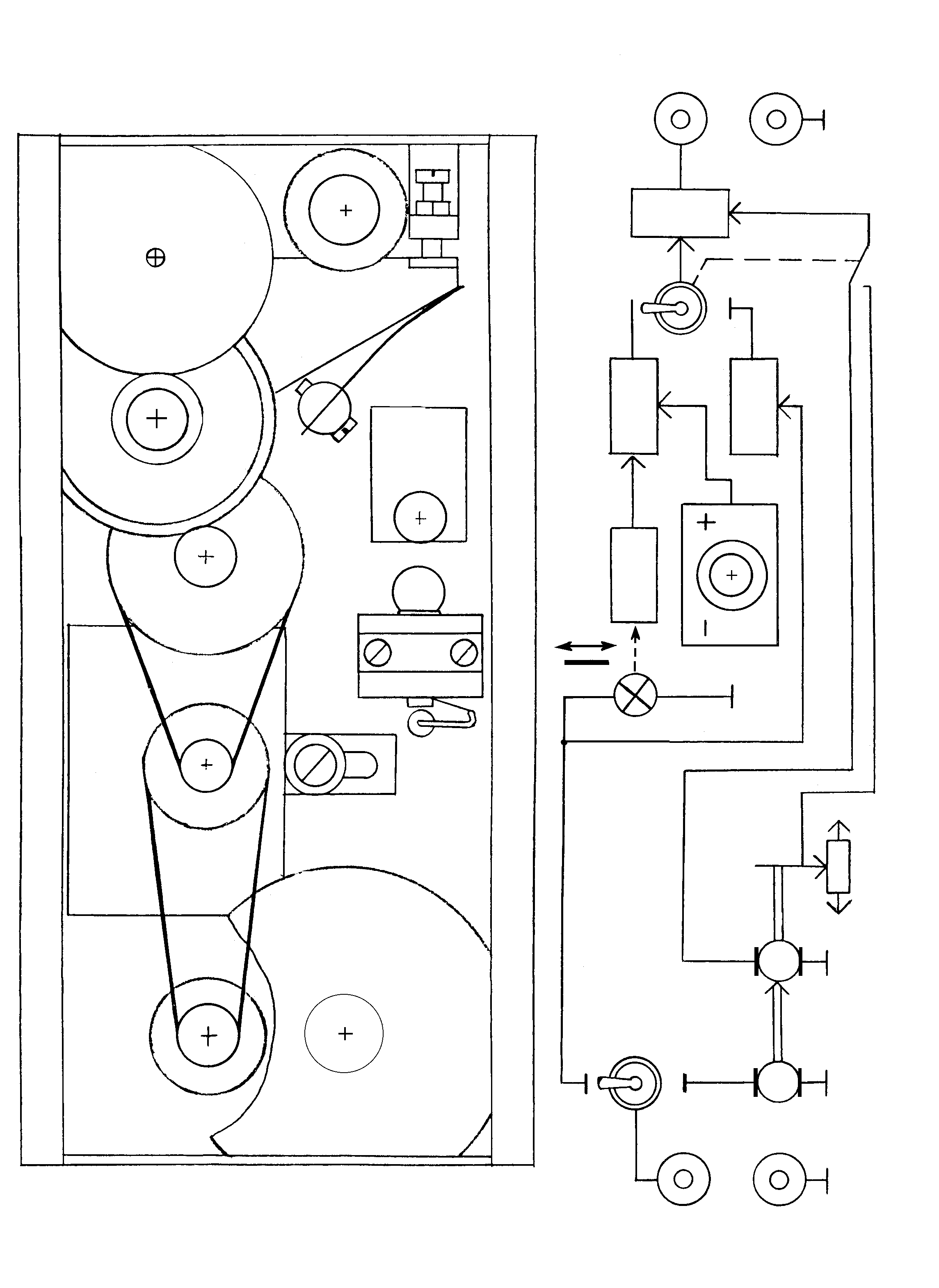
Стенд должен подключаться к клеммам на передней панели КСТ-4, выведенным параллельно нагрузке. Сигнал обратной связи по скорости или положению подается на входной сумматор КСТ-4, или измеряется его вольтметром и вводиться через АЦП в компьютер. Функциональная схема КСТ4 обозначена на рисунке 2.
5. Панель управления стенда для исследования электропривода служит для задания вида объекта и его структурных связей.
Панель (рис. 3) содержит:
– мнемосхему устройства, включающую переключатели, потенциометры, с помощью которых задаются структура и параметры исследуемого устройства;
– наглядную кинематическую схему электропривода с двигателем постоянного тока и органами управления, позволяющими изменять его структуру и параметры.
При пользовании органами управления следует иметь в виду:
- соединение связей производится установкой соответствующих тумблеров в сторону замыкания линии;
- вращение потенциометра по часовой стрелке приводит к увеличению напряжения на его выходе.
Использование органов управления лицевой панели комплекса при работе в различных режимах представлено в таблице 1.
Таблица 1
Положение органов управления
|
Режим работы электропривода
|
SA1
|
Регулятор усилия
|
Фиксатор
|
|
Режим позиционирования
|
0
|
+
|
+
|
|
Режим управления скоростью
|
1
|
+
|
-
|
Примечание: Положение тумблеров:
«+» - используется; 1 - верхнее положение;
«-» - выключен. 0 - нижнее положение.
6. Моделирование привода может быть реализовано в двух режимах: позиционирования и управления скоростью.
В первом случае выходным сигналом является сигнал, снимаемый с потенциометра Rп. Подсоединение потенциометра к кинематике привода осуществляется механически посредством фиксатора. Крайние положения потенциометра Rп воспринимаются концевыми датчиками. Их срабатывание приводит к блокировке двигателя. Разблокирование производится подачей на вход системы управления напряжения противоположной полярности. Нагрузка на электропривод изменяется с помощью регулятора усилия.
Нагружение двигателя осуществляется за счет силы трения, возникающей между поверхностями шкива, расположенного на валу двигателя и упругого элемента регулятора. Подвод упругого элемента осуществляется поворотом ручки регулятора по часовой стрелке. Регулятор снабжен храповым механизмом.
Во втором случае в режиме управления скоростью выходным сигналом стенда является сигнал тахогенератора. Нагружение привода осуществляется описанным выше способом. Потенциометр Rп должен быть выведен из зацепления с приводом посредством фиксатора.
7. Методика измерения физических величин c помощью КСТ-4 при экспериментах с реальным объектом.
Комплекс схемотехнический позволяет измерять и фиксировать в ОЗУ ЭВМ следующие физические величины:
а) Напряжение управляющего воздействия Uн, подаваемое на объект управления.
б) Ток, протекающий через исполнительный элемент объекта.
в) Сигнал, снимаемый с измерительного устройства объекта.
Возможно совмещение тока, напряжения и сигнала обратной связи на одном графике, что позволяет наглядно представить исследуемый процесс. Однако зафиксировать выходные переменные в одном эксперименте нельзя, так как комплекс имеет только один АЦП. Поэтому данные переменные фиксируются при наблюдении двух переходных процессов. При этом должна быть обеспечена повторяемость переходных процессов при постоянных начальных условиях и параметрах объекта управления.
Для реализации эксперимента по изучению параметров объекта управления следует настроить управляющую программу (ANSYS) и аппаратную часть комплекса КСТ-4 так, чтобы изменению задающего воздействия по одному из восьми вариантов (см. режим 4 программы) соответствовало изменение управляющего воздействия, подаваемого на реальный объект управления. При этом необходимо обеспечить линейность преобразования цифрового кода в напряжение управляющего воздействия, а также необходимый коэффициент преобразования. В данном эксперименте код управляющего воздействия должен быть равен коду задающего воздействия. Для этого в режиме 3 программы следует указать следующие значения коэффициентов алгоритма управления:
|
В0 = 1;
|
А1 = 0;
|
R0 = 0;
|
|
В1 = 0;
|
А2 = 0;
|
ВI = 0.
|
|
В2 = 0;
|
|
|
При этом алгоритм управления будет представлен пропорциональным звеном с единичным коэффициентом передачи.
Коммутация функциональных элементов производится в соответствии с рис. 1. Необходимо задать следующие значения коэффициентов передачи:
|
Квх = 1 ;
|
Кп = 0,1 ;
|
|
Ку = 0,1 ;
|
Кос = 1
|
При этом суммарный коэффициент передачи цифровой и аналоговой части комплекса, приведенный к внутренней программной переменной управляющего воздействия U будет равен 20 В. Это означает, что при U= 1 на объект будет подаваться сигнал + 20В, при U= -1 - сигнал минус 20В. Выполнение данного условия следует проконтролировать в режиме 7 программы (тест аппаратуры САУ), наблюдая с помощью встроенного вольтметра напряжение на нагрузке. При необходимости суммарный коэффициент передачи может быть подстроен или изменен с помощью потенциометра Кос.
Для поочередного измерения тока нагрузки Iн и управляемой величины Y следует два раза вызвать режим 8 (рабочий режим). В первом запуске необходимо задать директиву 1 (измерение тока нагрузки), предварительно подключив вход АЦП к выходу измерителя тока. Затем, подключив вход АЦП к вольтметру и установив переключатель вольтметра в положение измерения внешнего сигнала, произвести второй запуск. При этом необходимо задать в программе директиву 0 (измерение управляемой величины). После выполнения данных операций можно пронаблюдать графики и таблицы измеряемых величин. Следует иметь в виду, что график изменения тока нагрузки будет постоянно зафиксирован и может обновиться только при соответствующем запуске рабочего режима программы по директиве 1.
Для наблюдения физических величин в требуемом масштабе следует произвести калибровку измерительного канала.
При калибровке учитываются коэффициенты передачи аналого-цифрового преобразователя (АЦП) потенциометра, включенного на его входе, коэффициент передачи измерителя тока, а также суммарный коэффициент передачи тракта измерения физической управляемой величины (например, скорости вращения электропривода), куда входят коэффициент передачи датчика, передаточной цепи, связывающей его с объектом управления и нормирующего усилителя.
Основное допущение, принятое при калибровке – предположение, что ЦАП, АЦП и измерительные усилители обладают линейными характеристиками с ограничением минимального и максимального уровней аналоговых сигналов. ЦАП и АЦП имеют по 8 двоичных разрядов. При максимальном значении цифрового кода, равном 255, на выходе ЦАП выделяется напряжение + 10В. При нулевом значении кода выходное напряжение отрицательно и равно минус 10В. Нулевому выходному напряжению соответствует цифровой код 127. Коэффициент преобразования АЦП регулируется с помощью потенциометра. Кроме того, могут регулироваться коэффициенты передачи других элементов, входящих в систему управления.
Операции калибровки производятся в режиме 9 программы (обработка результатов эксперимента). Задав директиву «Ввод поправочных коэффициентов», можно пронаблюдать максимальные и минимальные значения результатов измерения напряжения управляющего воздействия, тока нагрузки и измеряемой физической величины, приведенных к диапазону измерения внутренних программных переменных от -1 до +1. Учитывая данные значения, следует ввести величины поправочных коэффициентов, позволяющие получить график и таблицы данных величин в удобном для наблюдения масштабе. Оцифровка графиков может относиться только к одной переменной Y. В исходном состоянии отметки на оси ординат соответствуют диапазону изменения программных переменных от -1 до +1. В случае, если для переменной Y будет введен поправочный коэффициент, отличный от единицы, то оцифровка графика автоматически изменится.
Поправочный коэффициент для измерения тока определяется следующим образом. Устанавливается напряжение на нагрузке, равное +20В и подключается нагрузочный резистор Rнд, величина которого равна 255 Ом. Тогда величина тока, протекающего через измеритель тока, будет равна 78 мА.
Коэффициент передачи измерителя тока приблизительно равен 50 В/А. Поэтому на его выходе должно установиться напряжение 3,92 В. Это напряжение, пройдя через АЦП, должно преобразоваться в цифровой код. Коэффициент передачи входного потенциометра АЦП должен быть установлен в крайнее правое положение. Запустив режим 8 программы и указав директиву измерения тока, следует получить результаты измерения, зафиксированные в ЭВМ. В программе в режиме 9 обработки результатов эксперимента в директиве 8 можно подобрать поправочный коэффициент, при котором будет индицироваться значение тока 0,078 А.
Подобным же образом определяется поправочный коэффициент и для измерения величины Y. Подав максимально возможное управляющее воздействие на объект управления, следует подключить вольтметр к гнезду ввода измеряемого сигнала, а вход АЦП – к вольтметру. Запустив режим 8 программы и указав директиву измерения управляемой величины Y, следует определить ее установившееся значение.
Используемая литература.
1. Ю.А. Борцов, Г.Г. Соколовский. Автоматизированный электропривод с упругими связями. – СПб.: Энергоатомиздат, 2002г.
2. Проектирование роботизированных технологических комплексов: метод. указания к курсовому проектированию/ВлГУ. Составители: А.А.Кобзев, В.П.Умнов,
В.А.Дувин и др. – Владимр, 2010г.
3. Методические указания к дипломному проектированию для студентов специальности 210300 «Роботы и робототехнические системы»/ ВлГУ. Составители: И.Н. Егоров, А.А. Кобзев. Владимир, 2009г.
4. Интернет.
Лабораторный комплекс по исследование электромеханических систем