Судовая электрическая станция (СЭС)
СОДЕРЖАНИЕ
Введение 3
1 Общие положения и описание принципа работы 3
2 Выбор элементов 6
3 Выбор микроконтроллера 9
4 Программная реализация 10
Заключение 16
Литература 17
ВВЕДЕНИЕ
Человечество издавна стремилось к всеобщей автоматизации и оптимизации окружающей среды. В данной работе рассмотрен пример автоматизации управления судовой электрической станции.
Судовая электрическая станция (СЭС) - это энергетический комплекс, состоящий из источников электроэнергии и главного распределительного щита (ГРЩ), к которому они подключены. В качестве основных источников электроэнергии на современных судах применяют генераторы переменного тока. Но дело не только в аспектах конструкции, но и в автоматизации регулирования таких параметров, как мощность, частота, напряжение и другие. Ведь именно эти параметры в большей степени и определяют эффективность работы СЭС и затраты на поддержание ее работоспособности.
1 ОБЩИЕ ПОЛОЖЕНИЯ И ОПИСАНИЕ ПРИНЦИПА РАБОТЫ
Нормальная работа потребителей электроэнергии СЭС возможна только в том случае, если на электростанции вырабатывается высококачественная электроэнергия, т.е. если напряжение и частота генераторов переменного тока поддерживаются с требуемой точностью. В качестве основных источников электроэнергии на судах используют генераторы с автономным приводом - генераторные агрегаты (ГА), которые состоят из первичного двигателя и генератора и генераторы отбора мощности от главного судового двигателя.
Автоматизация СЭС может осуществляться путем контроля значений напряжения и частоты за счет специального оборудования: блоков стабилизации частоты вращения и напряжения.
Регулирование напряжения осуществляется следующими методами: стабилизация напряжения по возмущению, по отклонению и комбинированная.
В качестве источников регулируемого напряжения используются генератор постоянного тока, либо полупроводниковый выпрямитель. Поддержание неизменной частоты сводится, в свою очередь, к стабилизации частоты вращения вала первичного двигателя ГА. Первичный двигатель загружается только активной нагрузкой, при ее изменении изменяется частота. Стабилизацию частоты вращения вала ГА осуществляют с помощью автоматических регуляторов, которые воздействуют на исполнительные органы, изменяющие подачу топлива (пара) в первичные двигатели.
Принцип действия генератора основан на законе электромагнитной индукции.
Основными величинами, характеризующими синхронный генератор, являются:
- электрическое напряжение на зажимах U, вольт;
- сила тока I, ампер;
- полная электрическая мощность Pi, ватт;
- число оборотов ротора в минуту n;
- коэффициент мощности cos .
Двигатель постоянного тока — электрическая машина, машина постоянного тока, преобразующая электрическую энергию постоянного тока в механическую энергию.
Регулирование частоты вращения двигателей постоянного тока можно осуществлять путем изменения потока, введения дополнительного сопротивления в цепь якоря и изменения напряжения сети. В двигателях параллельного возбуждения наиболее просто осуществляется регулирование изменением потока, реализуемого с помощью реостата в цепи возбуждения. При увеличении значения дополнительного сопротивления магнитный поток Ф уменьшается и частота вращения растет.
Общая схема регулирования частотой судовой электростанции представлена на рис. 1.1.
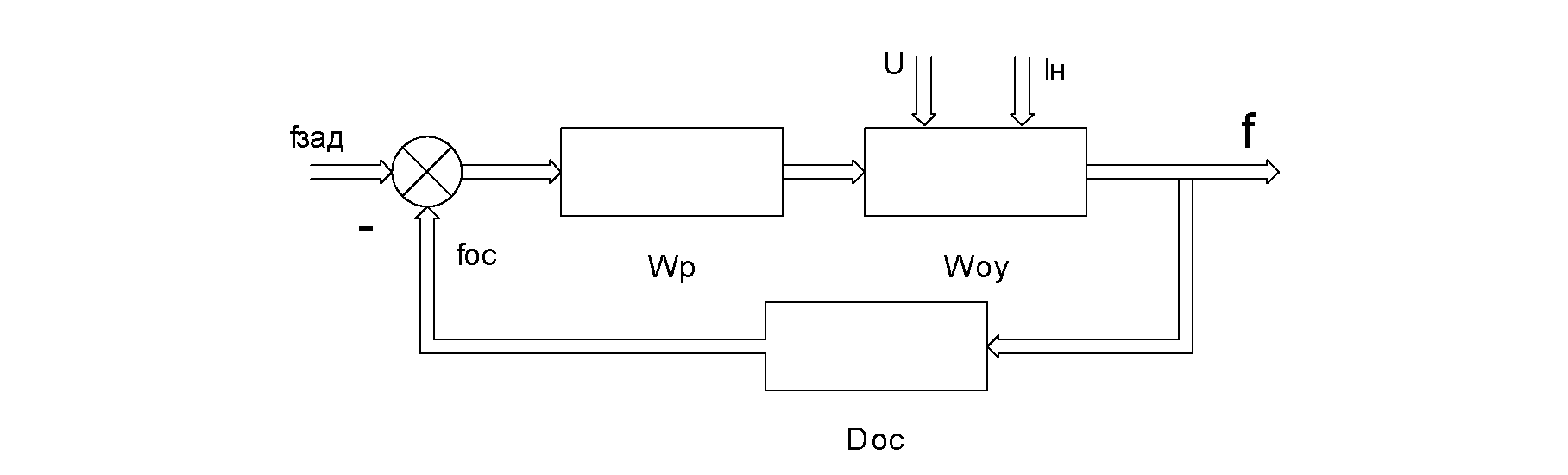
Рис. 1.1. Схема регулирования частотой двигателя судовой электростанции
Здесь
fзад - заданная оператором частота;
fос – частота, измеренная датчиком по цепи обратной связи;
Wр – передаточная функция регулятора;
Wоу – передаточная функция объекта управления;
Dос – датчик, регистрирующий частоту;
f – частота на выходе объекта управления.
Полагаясь на данную схему, можно сделать вывод о том, что оптимизация частоты будет происходить по отклонению, где в цепи обратной связи находится датчик, регистрирующий значение частоты на выходе объекта управления. Также можно сказать, что сумматор отвечает за разность частоты, заданной оператором, и частоты, принятой с датчика. Это определяет величину отклонения от заранее заданных оператором значений и ее регулирование в дальнейшем.
В основе регулирования напряжения лежит тот же принцип с незначительными отличиями в области возмущений рис. 1.2.
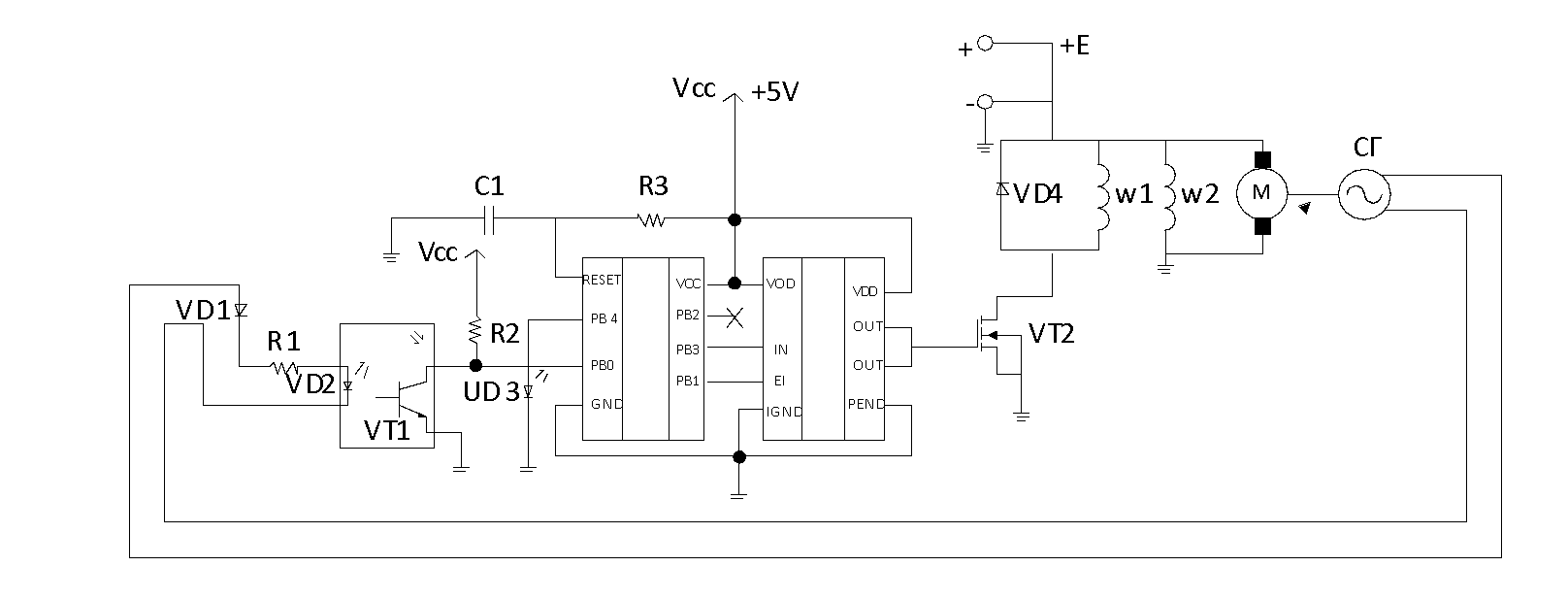
Рис. 1.2. Структурная схема
Все элементы данной структурной схемы выбраны обоснованно в связи с необходимостью реализации точного управления и получения качественной энергии для потребителей электростанции. Далее приведен перечень необходимых конструкторских решений.
2 ВЫБОР ЭЛЕМЕНТОВ
Оптрон типа МОС8101 применяется для гальванической развязки цепи с малым током коммутации. В качестве коммутирующего элемента используется биполярный транзистор.
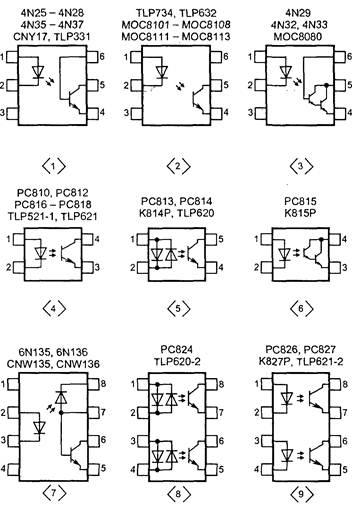
Рис. 2.1. Оптрон типа МОС8101
Двигатель постоянного тока типа ВДМ 200
Характеристики двигателя табл. 2.1:
Таблица 2.1. Характеристики двигателя постоянного тока типа ВДМ 200
|
Номинальная мощность, кВт |
200 |
|
Максимальная часовая мощность, кВт |
220 |
|
Номинальная частота вращения вала двигателя, об/мин |
1500 |
|
Род тока |
постоянный |
|
Номинальная частота тока |
50 Гц |
|
Номинальное напряжение, В |
400 |
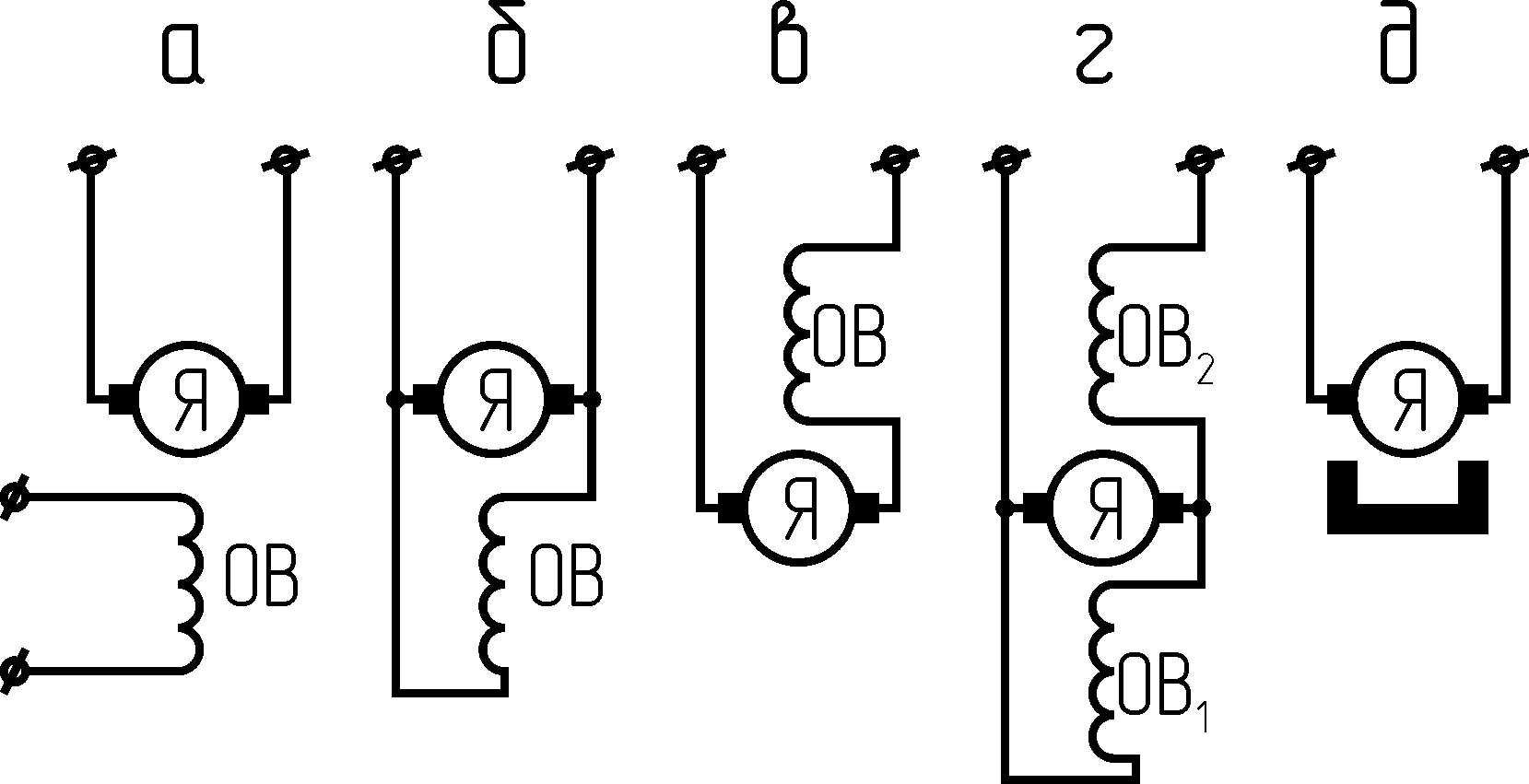
Рис. 2.2. Двигатель постоянного тока
Генератор переменного тока
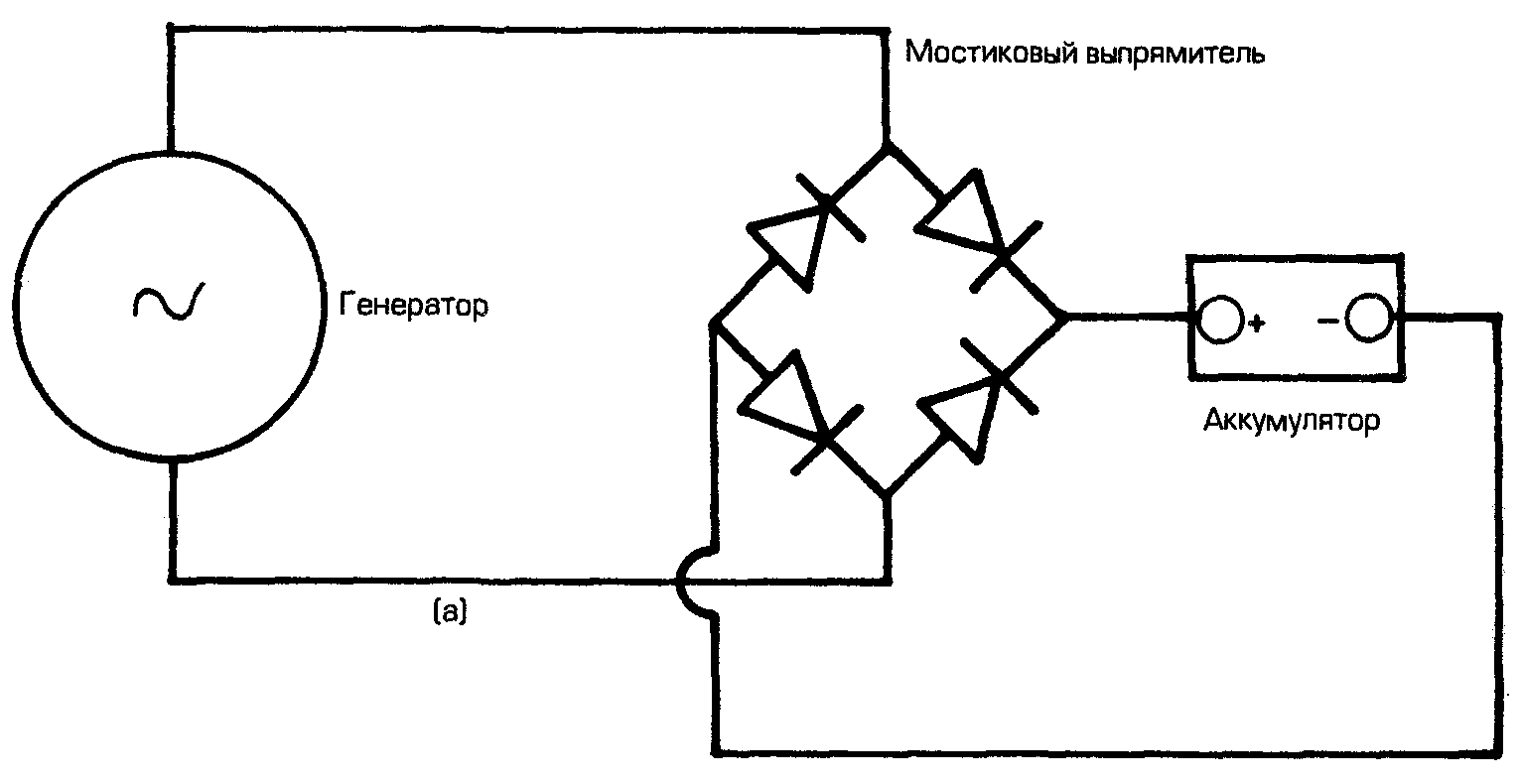
Рис. 2.3. Генератор переменного тока
Драйвер типа UCC37322. Напряжение питания драйвера лежит в диапазоне 415 В, поэтому может использоваться напряжение питания микроконтроллера VCC. Управляется драйвер стандартными логическими сигналами микроконтроллера: выходной сигнал ШИМ ОС0 поступает на основной вход IN, через порт PB1 поступает дополнительный сигнал разрешения EI, который позволяет сигналом нулевого уровня отключить выходной силовой транзистор VT2 независимо от сигнала ШИМ. Этот дополнительный сигнал позволяет программно запретить управление выходным ключом. Драйвер обеспечивает задержку переключения сигнала управления OUT не более 70 нс при входной емкости МОП - транзистора до 10 нФ.
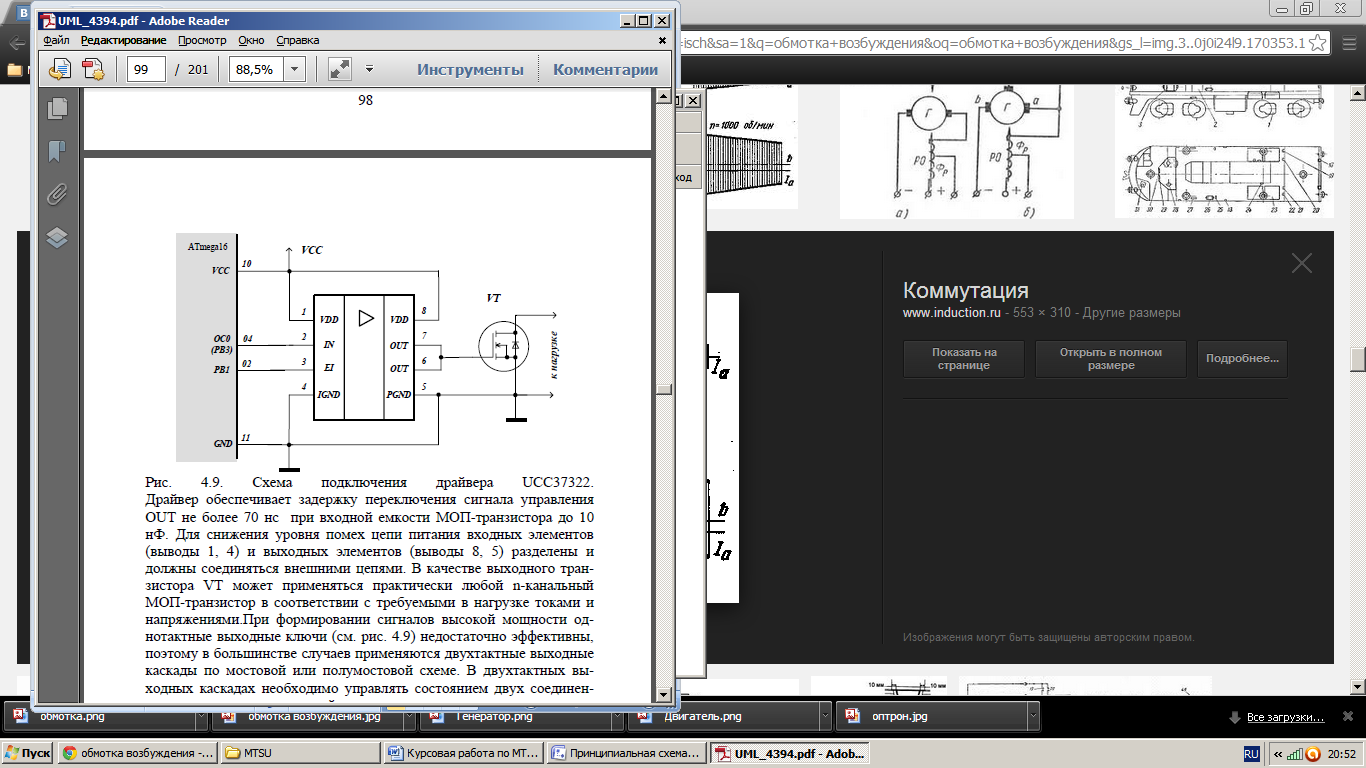
Рис. 2.4. Драйвер
Обмотка возбуждения. В количестве двух. Одна из них основный поток возбуждения, а другая за предел скорости вращения ГА. Здесь ток якоря равен сумме тока нагрузки и тока возбуждения: Iя = Iн + Iв.
Рис. 2.5. Обмотка возбуждения
3 ВЫБОР МИКРОКОНТРОЛЛЕРА
В соответствии с поставленными задачами и выбранными устройствами для реализации будем использовать микроконтроллер ATtiny2313. ATtiny2313 улучшенный вариант микроконтроллера AT90S2313. Это семейство МК AVR зарекомендовало себя, вследствие простой архитектуры и параметрам, отвечающим общим требованиям.
Общие характеристики:
- 120 инструкций оптимизированных для программирования на языках высокого уровня;
- 32 регистра общего назначения;
- почти каждая инструкция выполняется за 1 такт генератора, за счет чего быстродействие достигает 20 MIPS;
- 2 килобайта флеш-памяти для программ. Флеш-память может программироваться прямо с контроллера;
- 128 байт EEPROM (энергонезависимая память);
- 128 байт SRAM (оперативная память).
- один 8 битный таймер/счетчик;
- один 16 битный таймер/счетчик;
- четыре ШИМ канала;
- аналоговый компаратор;
- Watchdog таймер;
- USI универсальный последовательный интерфейс;
- USART.
Для микроконтроллера наиболее удобен режим программирования по последовательному SPI интерфейсу.
Как и все микроконтроллеры AVR серии ATtiny2313 (рис. 3.1) производителен и экономичен. Широко доступен в продаже. Недорог.

Рис. 3.1. Микроконтроллер ATtiny2313
4 ПРОГРАММНАЯ РЕАЛИЗАЦИЯ
Блок – схема
Суть программной реализации состоит в сравнении эталонного значения исследуемой характеристики (периода) с полученным значением в процессе функционирования устройства. Далее, если полученное значение соответствует эталонному, формируется функция управления, если нет - приведение в исполнение мер по ликвидации ошибки для корректировки управляемых параметров.
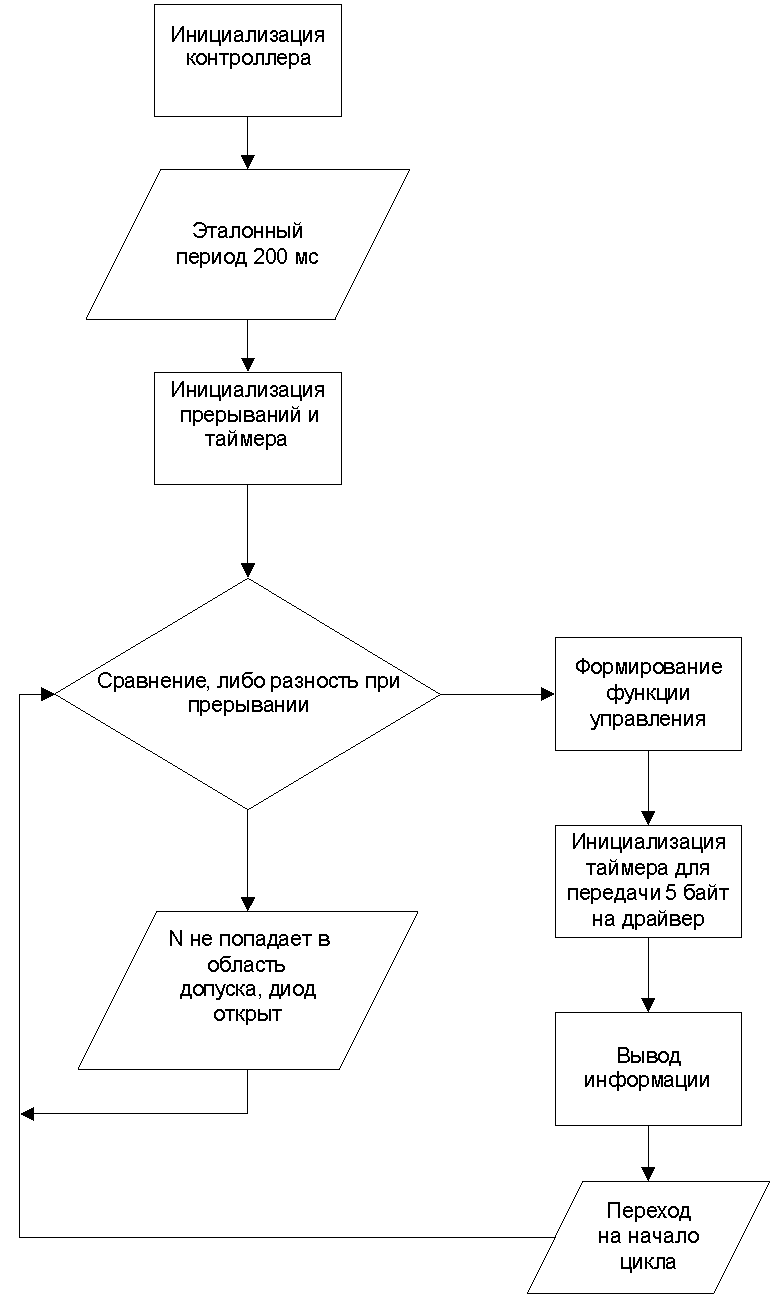
Рис. 4.1. Блок – схема управления
Программная реализация
.include "tn13def.inc"
.def temp1=r16
.def count=r17
.def flag=r18
.def sigma=r19
.def lsigma=r20
.def Tint=r21
.def Tdif=r22
.def nupr=r23
.def temp1=r24
.def Tet=200; заданное значение периода
.def diod=r25
.def Kp=r26
.def temp3=r27
.CSEG
.ORG $000
rjmp reset
.ORG $006
rjmp VEC_PR; вектор прерывания
reset:
ldi temp, low (RAMEND)
out SPL, temp
ldi temp, 0b00000011
out DDRB, temp
clr flag
clr count
ldi temp,(1<<TOIE0)
out TIMSK, temp
ldi temp, (1<<ISC01)
out mcucr, temp
ldi temp,(1<<INT0)
out GIMSK, temp
sei
main
rjmp main
Taimer:
out GTCCR, temp
out TCNT0, temp1
ldi TMP_0,(1<<COM0A1)|(1<<WGM01)|(1<<WGM00)
out TCCR0A,TMP_0
out OCR0A,temp1
out OCR0B,temp1
ldi TMP_1,(1<<OCF0B)
out TIFR0, TMP_1
out TIMSK0,TMP_1
ldi TMP_0,(1<<CS00)
out TCCR0B, TMP_0
ret
Shim:
ldi temp, 0b00000011
out TCCR0A, temp
ldi temp, 0b00000110
out TCCR0B,temp
ldi r18,0
out PORTB,r18
clr sigma
clr lsigma
clr Tint
clr Tdif
clr nupr
clr diod
clr count
Poluch:
in r26,TCNT0
clr r27
out TCNT0, r27
cp r26,Tet
breq out
brcs min
Plus:
subi r26, Tet
out sigma, r26
Out:
sbi PORTB, PBO
nop
cbi PORTB, PB0
min:
subi Tet,r26
Fupr:
ldi Kp,1
out nupr,Kp
ldi nupr, Kp
add nupr, Kp
ldi nupr, siqma
add nupr,sigma
ldi nupr, sigma
add nupr, sigma
ldi Tet, Tint
sub Tet,Tint
ldi nupr, Tet
add nupr, Tet
ldi Tdif, Tet
sub Tdif,Tet
ldi nupr, Tdif
add nupr,Tdif
ldi sigma,lsigma
subi sigma,lsigma
ldi nupr,sigma
add nupr,sigma
ser temp
out DDRC, temp
out PORTC, temp
ldi temp,0b00010000
out TIMSK,temp
sbi TIMSK, OC1E1A
ldi temp,0b 00001101
out TCCR1B,temp
ldi temp, high (5760)
out OCR1AH
ldi temp, low(5760)
out OCR1Al
clr temp
clr nupr
clr temp1
reti
ЗАКЛЮЧЕНИЕ
В данной работе разработаны методы и устройства для автоматизации параметров судовой электростанции. Реализация их представляется возможным только на программном уровне или уровне модели, ввиду недоступности технологий, либо недостатка мощностей. Но приведенная в работе модель может быть использована для внедрения в судовые электростанции
ЛИТЕРАТУРА
1. Иванов Ю. И., Цирулик Д. В., Югай В. Я. “Программно-аппаратная реализация типовых функций в системах управления”, ТТИ ЮФУ, 2009.
2. Ткаченко А. Н. Судовые системы автоматического управления и регулирования. Учебное пособие. - Л.: Судостроение, 1984.-288 с., ил.
3. Хайдуков О. П. Эксплуатация энергоэнергетических систем морских судов: Справочник /О. П. Хайдуков, А. Н. Дмитриев, Г. Н. Запорожцев. – М.: Транспорт, 1988. – 223 с.: ил., табл. – Библиогр.: с. 211.
4.Никифоровский Н. Н., Норневский Б. И. Судовые электрические станции, “Транспорт”, 1974.
5.Китаенко Г. И. Справочник судового электротехника, “Судостроение”, 1980.
18
Судовая электрическая станция (СЭС)