Расчет автоматизированного электропривода
Курсовой проект
«Расчет автоматизированного электропривода»
Содержание
|
ВВЕДЕНИЕ
|
2
|
|
ЗАДАНИЕ
|
3
|
|
Раздел 1. Выбор электрооборудования
|
5
|
|
1.1. Выбор электродвигателя
|
6
|
|
1.1.1. Определение режима работы электродвигателя
|
6
|
|
1.1.2 Расчет эквивалентного момента на валу
Электродвигателя
|
6
|
|
1.1.3. Определение необходимой скорости вращения
Электродвигателя
|
7
|
|
1.1.4. Определение мощности электродвигателя
|
7
|
|
1.1.5. Выбор электродвигателя по каталожным данным
|
8
|
|
1.1.6. Проверка электродвигателя по условию перегрузки
|
8
|
|
1.2. Выбор управляемого преобразователя
|
9
|
|
1.2.1. Краткий обзор существующих управляемых
Преобразователей
|
10
|
|
1.2.2. Выбор управляемого преобразователя
|
|
|
1.3. Выбор согласующего трансформатора
|
10
|
|
1.4. Выбор датчика тока
|
11
|
|
1.5. Выбор уравнительного реактора
|
11
|
|
1.6. Выбор тахогенератора
|
12
|
|
1.7. Расчет параметров цепи «тиристорный преобразователь
двигатель постоянного тока»
|
13
|
|
1.8. Обоснование необходимости применения замкнутой
системы управления электроприводом
|
13
|
|
1.9. Выводы по разделу
|
14
|
|
раздел 2. Расчет статики электропривода
|
17
|
|
2.1. Составление схем для расчета системы управления
Электроприводом
|
17
|
|
2.1.1. Составление упрощенной принципиальной схемы
|
18
|
|
2.1.2. Составление функциональной схемы
|
18
|
|
2.1.3. Составление структурной схемы
|
19
|
|
2.2. Определение коэффициента обратной связи по скорости
|
19
|
|
2.3. Определение напряжения задания задатчика скорости
|
20
|
|
2.4. Определение коэффициента обратной связи по току
|
10
|
|
2.5. Определение коэффициентов усиления суммирующего
Усилителя
|
21
|
|
2.6. Построение статической характеристики электропривода
в замкнутой и разомкнутой системе управления
|
21
|
|
2.7. Выводы по разделу
|
22
|
|
Раздел 3. Расчет динамики электропривода
|
24
|
|
3.1. Составление структурной схемы электропривода
для расчета динамики
|
24
|
|
3.2. Составление передаточных функций элементов
|
25
|
|
3.2.1. Составление передаточной функции двигателя
постоянного тока
|
25
|
|
3.2.2. Составление передаточной функции тиристорного
преобразователя (тиристорного выпрямителя)
|
26
|
|
3.2.3. Составление передаточной функции цепи обратной
связи по скорости
|
27
|
|
3.3. Составление передаточной функции системы
|
39
|
|
3.4. Проверка устойчивости системы электропривода
|
31
|
|
3.5. Синтез корректирующего устройства
|
32
|
|
3.6. Построение переходного процесса в системе
Электропривода
|
33
|
|
3.7. Оценка качества переходного процесса
|
34
|
|
3.8. Выводы по разделу
|
35
|
|
Выводы по курсовому проекту
|
|
|
библиографический Список
|
38
|
Введение
Для современного промышленного производства характерно широкое внедрение автоматизированного электропривода основы механизации и комплексной автоматизации технологических процессов. Совершенствование систем автоматизированного электропривода с использованием новейших достижений науки и техники является одним из непременных условий при решении задач всемерного повышения эффективности общественного производства, ускорения роста производительности труда и улучшения качества выпускаемой продукции.
Современный электропривод определяет собой уровень силовой электровооруженности труда и благодаря своим преимуществам по сравнению со всеми другими видами приводов является основным и главным средством автоматизации рабочих машин и производственных процессов.
Электропривод определяется как электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением [1]. В отдельных случаях в этой системе могут отсутствовать преобразовательное и передаточное устройства. Структура электропривода приведена на рис.1.1.
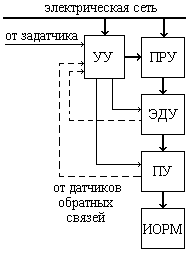
Рис.1.1. Структура электропривода
Она содержит преобразовательное устройство (ПРУ), определяемое как электротехническое устройство, преобразующее род тока, напряжение, частоту и изменяющее показатели качества электрической энергии, предназначенное для создания управляющего воздействия на электродвигательное устройство.
Электродвигательное устройство (ЭДУ) является электротехническим устройством электрической машиной, предназначенным для преобразования электрической энергии в механическую или механической энергии в электрическую.
Передаточное устройство (ПУ) предназначено для передачи механической энергии от электродвигательного устройства электропривода к исполнительному органу рабочей машины (ИОРМ) и согласования вида и скоростей их движения.
Управляющее устройство (УУ) является электротехническим устройством, предназначено для управления преобразовательным, электродвигательным и передаточным устройствами. Управляющее устройство, как правило, содержит информационную часть, получающую информацию от задатчиков (сигнал задания) и датчиков обратной связи (сигнал о состоянии привода) и в соответствии с заданными алгоритмами вырабатывает сигналы управления.
Посредством системы электропривода приводятся в движение рабочие органы технологических (производственных) машин и осуществляется управление преобразованной энергией. Под управлением здесь понимают организацию процесса преобразования энергии, обеспечивающую в статических и динамических условиях требуемые режимы работы технологических машин. Если основные функции управления выполняются без непосредственного участия человека (оператора), то управление называют автоматическим, а электропривод автоматизированным.
Параметрами электропривода являются скорость, нагрузка, диапазон регулирования, жесткость механической характеристики и электромеханическая постоянная времени.
Для управления электроприводами применяется множество различных устройств, однако, в настоящее время наиболее рациональным кажется использование тиристорного и транзисторного управления электроприводами. Для этой цели в разомкнутой или замкнутой системах управления электроприводами используют управляемые выпрямители (для систем с двигателями постоянного тока) и регуляторы напряжения или преобразователи частоты (для систем с асинхронными двигателями).
Задание на курсовое проектирование
Требования к электроприводу:
Диапазон регулирования угловой скорости

Заданный статизм,%
Допустимое перерегулирование,%

Время регулирования, с
Допустимое число колебаний
Режим работы электропривода - стабилизация скорости.
Данные механизма при кратковременном режиме работы:
Моменты сопротивления на валу, Н*м





Интервалы времени, мин



Момент инерции механизма, кг*м2

Максимальная угловая скорость механизма, с-1

Данные редуктора
Передаточное отношение

КПД

1.1 Выбор электрооборудования
1.1 Выбор электродвигателя
1.1.1 Определение режима работы
Характер нагрузки производственного механизма определяет режим работы электродвигателя. Всего различают восемь режимов работы электродвигателей от S1 до S8.
Здесь мы имеем Кратковременный режим работы (S2) это режим, при котором периоды неизменной номинальной нагрузки чередуются с периодами отключения машины; при этом периоды нагрузки не настолько длительны, чтобы превышения температуры машины могли достигнуть установившихся значений, а периоды остановки настолько длительны, что все части ее охлаждаются до температуры окружающей среды.
Стандартизованы следующие продолжительности рабочего периода: 10, 30, 60 и 90 мин. Они указываются в обозначении режима, например, S2-10 мин.
В подобном режиме работают электродвигатели привода механизмов разводки мостов, подъема щитов плотин, опускания шлюзов, поворота лотков в инкубаторах и др.
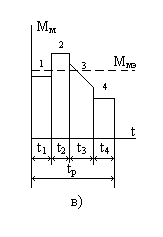
Рис.1 Нагрузочная диаграмма механизма
1.1.2. Расчет эквивалентного момента на валу электродвигателя
В случае если нагрузочная диа�грамма содержит наклонные трапецеидальные участки, их надо предварительно заменить эквивалентными ступенями.
Значение момента эквивалентной ступени на i-том тра�пецеидальном участке с начальным значением момента Мнач и ко�нечным mkoh может быть рассчитано по формуле:



Определяем эквивалентный момент на валу двигателя
Коэффициент запаса принимаем равным


1.1.3. Определение необходимой скорости вращения электродвигателя
Требуется найти наибольшую угловую скорость max и частоту вращения электродвигателя nmax.
Для нахождения этих параметров воспользуемся формулами:


где max максимальная угловая скорость двигателя, рад/с;
мmax максимальная угловая скорость механизма, рад/с.


1.1.4. Определение мощности
Рассчитываем эквивалентную мощность Рэкв на валу двигателя при наибольшей угловой скорости


Для кратковременного режима работы расчетная мощность на валу электродвигателя определяется по формуле

 мин
мин
мин



где tp – время работы двигателя,
Tн - постоянная времени нагрева электродвигателя.
1.1.5. Выбор электродвигателя по каталожным данным
Выбор двигателя по частоте вращения и по мощности необходимо производить по условиям:
nном nмах,
nном=2200 об/мин
Рном2963 Вт ; берем Рном=3800 Вт
Выбираем двигатель ПБСТ-43 с параметрами:
Напряжение Uн=220 В
Ток Iн=9.5 А
Момент Мн=16,5 Н*м
Магнитный поток Фн=5,12*10-3 Вб ,
КПД н=88 %
Момент инерции Jдв=0,056 кг*м2
Число витков обмотки якоря Wя=275
Сопротивление якоря при 15С Rя=0,25 Ом
Сопротивление добавочных полюсов при 15С Rдп=0,162 Ом
Число витков обмотки возбуждения Wов=2900
Сопротивление обмотки возбуждения при 15С Rов=600 Ом
1.1.6. Проверка электродвигателя по условию перегрузки
Для выполнения этой проверки необходимо рассчитать по�требляемый ток двигателя.
В процессе работы двигатель не всегда работает на номиналь�ную нагрузку, поэтому ток, протекающий по якорю двигателя, не всегда равен номинальному току двигателя.
Рабочий ток двигателя находиться из условия
Iпот=Mэкв / (k*Фном)
При расчетах электромеханических свойств двигателей k и Ф отдельно, как правило, не используются. Удобнее оперировать про�изведением этих величин k*Ф=С
Значение С, соответствующее номинальному значению тока возбуждения, а, следовательно, и потока, определяется по паспорт�ным данным двигателя для установившегося номинального режима

где С - конструктивный коэффициент двигателя;
Uном - номинальное напряжение двигателя, В;
IНОМ - номинальный ток двигателя, А;
Rяд - сопротивление якорной цепи двигателя, Ом;
ном -номинальная угловая скорость вращения двигателя, с-1


Определим сопротивление якорной цепи двигателя:

где т =1.46 коэффициент, учитывающий увеличение сопротивления при нагреве обмотки якоря двигателя ПБСТ 1-3 габарита.
Rдп сопротивление добавочных полюсов при 15оС, Ом;
Rщ = Uщ / Iном сопротивление щеточного контакта, Ом.
где Uщ примем равным 2В.


Следовательно, конструктивный коэффициент двигателя равен

Рабочий ток двигателя

Для того, чтобы двигатель не был перегружен и смог разо�гнаться до номинальной скорости, должно соблюдаться условие:
где Ммах=(25)*Мном - максимальный момент электродвигателя,
Мс мах - наибольший за рабочий цикл момент сопротивления на валу электродвигателя (приведенный к валу двигателя), h*m



Следовательно, условие выполняется.
1.2. Выбор управляемого преобразователя
1.2.1. Выбор типа преобразователя
Для питания электродвигателя от сети переменного тока пред�лагается выбрать трехфазный комплектный вентильный преобразо�ватель серии УКЭ-Л.
Преобразователь серии УКЭ-Л является нереверсивным трех�фазным зависимым преобразователем с фазовым управлением, пре�дусматривающим возможность работы на два вида нагрузки: на дви�гатель постоянного тока в варианте управляемого выпрямителя или на асинхронный двигатель в варианте тиристорного регулятора на�пряжения.
При проектировании электропривода выбор тиристорного преобразователя должен производиться с учетом возможной его на�грузки по току
где Idном номинальный ток преобразователя, А.
Коэффициент запаса учитывает нестабильность момента ста�тического сопротивления технологических машин, определяемого в основном силами трения, затрудняющими процесс пуска электро�двигателя после длительного останова.

Принимаем Idном=50 А
Выбираем УКЭ-Л-3101-37-2-5-УХЛ4 с параметрами:
Uc=380 B
fc=50 Гц
Idном=50 А
Udном=230 ±5 B
1.3. Выбор согласующего трансформатора
Согласующие трансформаторы предназначены для обеспечения питания тиристорных комплектов и согласования питающего напряжения с номинальным током и напряжением работы тиристорных комплектов.
В качестве согласующих трансформаторов применяются как однофазные, так и трехфазные трансформаторы.
В данном курсовом проекте будем использовать трехфазный согласующий трансформатор ТСП-16/0,7-74У4-380-205 В с параметрами:
Номинальная мощность трансформатора Pн=14.6 кВ*А
Напряжение первичной обмотки трансформатора U1 =380/660
Напряжение вторичной обмотки трансформатора U2=205/410 B
Потери мощности в опыте холостого хода Рхх=140 Вт
Потери мощности в опыте короткого замыкания Ркз=550 Вт
Номинальное напряжение в опыте короткого замыкания Uk=5,2%
Номинальный ток в опыте холостого хода Iхх=10% ,
Коэффициент полезного действия КПД=96% .
1.4. Выбор датчика тока
Выбираем датчик LA 55-P с параметрами: Idном=50 A, диапазон измерения 0-70 А Коэффициент трансформации 1/Rтт 1/1000 измерительное сопротивление min/max –10/100 Ом Коэффициент передачи датчика тока :
где Rизм - измерительное сопротивление, Ом;
Rэ- полное активное сопротивление якорной цепи системы «преобразователь-двигатель», Ом;
UвыхДТ- выходное напряжение датчика тока (для рассматривае�мых датчиков можно принять UвыхДТ =2,5 В);

где Rш сопротивление шин, Ом

где Rm- Активное сопротивление трансформатора ,Ом


где Еdo - максимальная ЭДС тиристорного преобразователя, В
kсх коэффициент схемы выпрямления (для трехфазной мостовой схемы kсхф=2.34, kсхл=1.34);
U2ф фазное напряжение вторичной обмотки согласующего трансформатора, В.


где Rk-эквивалентное фиктивное сопротивление, обусловленное
перекрытием токов в фазах преобразователя при коммутации вентилей.



1.5. Выбор уравнительного реактора

При согласованном управлении вентильными группами 1+2= сумма мгновенных напряжений отлична от нуля. Ток в уравнительном контуре имеет пульсирующий характер. Индуктив�ность уравнительных дросселей Lyp, ограничивающих среднее зна�чение уравнительного тока, можно определить по выражению:

где I*yp - нормированное значение уравнительного тока, зависящее от схемы выпрямления и угла регулирования. Приближенно можно принять:
- для трехфазной мостовой схемы I*yp =0.7 А;
Iур.доп -допустимый статический уравнительный ток, можно принять Iур.доп =0.2*Iном
1.6. Выбор тахогенератора
Электродвигатели серии ПБСТ оснащаются встроенными тахогенераторами серии TC-IM
Коэффициент передачи тахогенератора вычисляется по фор�муле:

где n число оборотов в минуту вала тахогенератора;
етг ЭДС тахогенератора, соответствующая числу об/мин его вала, В.
Тахогенератор серии ТС-1М имеет следующие параметры:
номинальная мощность якорной цепи тахогенератора, Вт 5
номинальная ЭДС тахогенератора-100 В
номинальная частота вращения тахогенератора, 3000 об/мин
тип возбуждения- постоянные магниты
1.7. Расчет параметров цепи «тиристорный преобразователь двигатель постоянного тока»
Рассчитываются следующие параметры:
Сопротивление якорной цепи двигателя:


Активное сопротивление трансформатора:

где Ркз – потеря мощности в опыте КЗ.
Максимальная ЭДС тиристорного преобразователя:


Коэффициент усиления тиристорного преобразователя при использовании системы управления с пилообразным напряжением определяется:
где Еd = Cном + IпотRяцд ЭДС двигателя при рабочей нагрузке, В;
Uуmax максимальное напряжение цепи управления (поскольку планируется использование стандартной блочной системы регуляторов, то максимально допустимое напряжение управления надо принять Uуmax = 10 В)


Эквивалентное фиктивное сопротивление, обусловленное
перекрытием токов в фазах преобразователя при коммутации вентилей:


Полное сопротивление якорной цепи:


Индуктивность обмотки якоря двигателя:

где р число пар полюсов двигателя (для двигателей серии ПБСТ число пар полюсов р=2, =0,25).
Индуктивное сопротивление фазы трансформатора, приведенное ко вторичной обмотке, Ом:

где kсхI = I2ф / Idn 0,82.
Индуктивность рассеяния трансформатора, Гн:

Lт=Xт /с
Где 
Суммарная индуктивность якорной цепи двигателя:
Lэ=Lяцд+Lур+2Lт

Электромагнитная постоянная якорной цепи:
Тяц = Lэ / Rэ

Электромеханическая постоянная:
Тмц= J Rэ / С2


где J=1,15Jд+Jm / iп2 полный приведенный момент инерции системы, состоящий из момента инерции двигателя, момента инерции механизма, приведенного к валу двигателя, и момента инерции передаточного механизма, учитываемого как 15% от момента инерции двигателя.
1.8. Обоснование необходимости применения замкнутой системы управления электроприводом
Для обоснования применения замкнутой системы электропри�вода необходимо найти требуемое абсолютное снижение угловой скорости электропривода, абсолютное снижение угловой скорости электропривода в разомкнутой системе и сравнить их между собой.
1)Находим требуемое абсолютное снижение угловой скорости электропривода при номинальной нагрузке:


где з заданный статизм в системе электропривода в относительных единицах,
0min - идеального Х.Х. двигателя на нижней границе диапазона регулирования.
2) Находим действительное абсолютное снижение угловой скорости электропривода в разомкнутой системе:
р = RэIпот / C

3) Применение замкнутой системы управления, необходимо, если соблюдается условие:
р > з
р=р / 0 max
Статизм разомкнутой системы по отношению к максимальной скорости идеального холостого хода:

1.9. Выводы по разделу
В данной главе был произведен выбор элементов системы электропривода: электродвигателя (с проверкой его по перегрузке) и тахогенератора, управляемого выпрямителя, согласующего трансформатора, сглаживающего реактора; рассчитали параметры якорной цепи системы «преобразователь-двигатель» и пришли к выводу о необходимости применения замкнутой системы управления электроприводом.
Для удобства дальнейших расчетов запишем все найденные значения в таблицу:
Сводная таблица расчетных параметров Таблица 1.
|
Название величины
|
Обозначение
|
Единицы
|
Значение
|
|
Напряжение питающей сети
|
Uc
|
В
|
380
|
|
Частота питающей сети
|
fс
|
Гц
|
50
|
|
Максимальное напряжение управления
|
Uуmax
|
В
|
10
|
|
Эквивалентный момент на валу двигателя
|
Мэкв
|
Нм
|
20.734
|
|
Диапазон регулирования
|
D
|
|
18
|
|
Передаточное число редуктора
|
I
|
|
12
|
|
Максимальная угловая скорость двигателя
|
мах
|
с-1
|
216
|
|
Максимальная частота вращения двигателя
|
nмах
|
об/мин
|
2063
|
|
Максимальная угловая скорость механизма
|
ммах
|
с-1
|
18
|
|
Параметры двигателя
|
|
Расчетная мощность на валу двигателя
|
Ррасч
|
Вт
|
2963
|
|
Коэффициент запаса
|
Кз
|
|
1,2
|
|
Коэффициент завышения мощности
|
Кзав
|
|
1,2
|
|
Коэффициент допустимой перегрузочной способности двигателя
|
Кдп
|
|
25
|
|
Относительная продолжительность включения
|
|
|
|
|
Номинальная мощность двигателя (табл.)
|
Рном
|
Вт
|
3800
|
|
Номинальная частота вращения двигателя (табл.)
|
nном
|
об/мин
|
2200
|
|
Номинальная угловая скорость двигателя (табл.)
|
ном
|
с-1
|
230
|
|
Номинальное напряжение питания (табл.)
|
Uном
|
В
|
220
|
|
Номинальный ток двигателя (табл.)
|
Iном
|
А
|
9.5
|
|
Сопротивление якорной цепи двигателя (табл.)
|
Rяцд
|
Ом
|
0.813
|
|
Конструктивный коэффициент электродвигателя
|
С
|
Вс
|
0.921
|
|
Рабочий ток двигателя
|
Iпот
|
А
|
22.512
|
|
Коэффициент передачи двигателя (1 / С)
|
kд
|
1/ Вс
|
1.08
|
|
Параметры тиристорного преобразователя
|
|
Номинальный выпрямленный ток
|
Idном
|
А
|
50
|
|
Номинальное выпрямленное напряжение
|
Udном
|
В
|
230
|
|
Коэффициент усиления преобразователя
|
kтп
|
В/В
|
25.862
|
|
Коэффициент запаса по току преобразователя
|
Кзап
|
|
1,2
|
|
Параметры датчика тока
|
|
Номинальный ток датчика тока
|
IномДТ
|
А
|
50
|
|
Сопротивление измерительного резистора
|
Rизм
|
Ом
|
10/100
|
|
Коэффициент передачи датчика тока
|
kдт
|
|
0.044
|
|
Параметры тахогенератора
|
|
Номинальная частота вращения тахогенератора
|
N
|
об/мин
|
3000
|
|
Номинальная ЭДС тахогенератора
|
eтг
|
В
|
100
|
|
Коэффициент передачи тахогенератора
|
kтг
|
Вс
|
0.318
|
|
Параметры цепи «преобразовательдвигатель постоянного тока»
|
|
Эквивалентное активное сопротивление якорной цепи
|
Rэ
|
Ом
|
1.257
|
|
Эквивалентное индуктивное сопротивление якорной цепи
|
Lэ
|
Гн
|
0.337
|
|
Электромагнитная постоянная времени
|
Tяц
|
с
|
0.2681
|
|
Момент инерции системы приведенный
|
J
|
кгм2
|
0.238
|
|
Электромеханическая постоянная времени
|
Tмц
|
с
|
0.325
|
|
Заданный статизм системы (требуемый статизм)
|
треб (з)
|
|
0.03
|
|
Полученный статизм разомкнутой системы
|
р
|
|
0.129
|
2. Расчет статики электропривода
В данном разделе необходимо построить статическую характеристику электропривода в замкнутой системе управления, а также рассчитать коэффициенты обратных связей по скорости и току, коэффициент усиления промежуточного усилителя и максимальное напряжение задатчика скорости. Построить электромеханическую характеристику электропривода.
2.1. Составление схем для расчета системы управления электроприводом.
Рис.2 Структурная схема тиристорного электропривода постоянного тока.
Двигатель представлен апериодическим и интегрирующим звеньями, охваченными ООС по ЭДС двигателя, и безинерционным звеном. На двигатель действует возмущающее воздействие. Звенья преобразователя включены последовательно в цепь основного воздействия. На суммирующий усилитель подаются сигналы задатчика скорости и сигналы двух ООС – по скорости и по току. В цепь ОС по скорости входят: датчик скорости, фильтр и регулируемый коэффициент ОС по скорости. В цепь ОС по току входят: датчик тока и фильтр датчика тока, узел отсечки и регулируемый коэффициент ОС по току.
2.2. Определение коэффициента обратной связи по скорости.
На основе структурной схемы системы для расчета обратной связи по скорости составим упрощенную структурную схему, полагая:
обратная связь по току не действует;
рассматриваем установившийся режим работы.
Рис. 3 Структурная схема для расчета коэффициента ОС по скорости.
Выражаем регулируемый коэффициент обратной связи по скорости, полагая, что kрс=1:
Для определения коэффициента обратной связи определим:

Найдём коэффициент обратной связи по скорости:


Найдем регулируемый коэффициент обратной связи по скорости:


2.3. Определение максимального напряжения задания скорости и коэффициента усиления усилителя.
Определим коэффициент усиления усилителя:

Определим максимальное напряжение задания:

2.4. Определение коэффициента обратной связи по току.
Разность между максимальным током Imax и током уставки Iу должна быть меньше 0.2Imax. Т.е. 0.8Imах<Iу<Imах. Значение Imax берется не более допустимого по условиям коммутации в двигателе. Для электродвигателей постоянного тока значение предельно допустимого тока лежит в пределах Imax =(23)Iном.



Определим регулируемый коэффициент обратной связи по току:
Для этого необходимо определить Тэкв:
Учитывая, что запаздывание в цепи обратной связи, обусловленное фильтрами на выходе датчиков, обычно мало и характер изменения самой выходной величины примерно идентичен характеру изменения выходного напряжения датчика, можно положить, что:
Тфдт=Тфтг
Тфтг – постоянная времени датчика скорости (Тфтг берут в пределах 0.003…0.005,поэтому мы принимаем Тфтг=0,004с)
Тфдт – постоянная времени датчика тока
Тзкв=Тmn+Тфдт+Тфтг
- среднестатистическое запаздывание преобразователя
m- фазность преобразователя, равная 6.
- полная постоянная времени тиристорного преобразователя.
Тф-постоянная времени фильтра на входе системы импульсно-фазового управления (Тф=0.005 с)
Тогда
Определим регулируемый коэффициент обратной связи по току:

2.5. Определение коэффициентов усиления суммирующего усилителя.
Для канала задания скорости коэффициент усиления суммирующего усилителя находится:
Для канала обратной связи по скорости коэффициент усиления суммирующего усилителя находим как:
Из условия работы двигателя на максимальной требуемой угловой скорости вращения:

Тогда

Для канала обратной связи по току коэффициент усиления суммирующего усилителя будет:
Где из условия протекания в якорной цепи двигателя, при его работе на рассчитываемую нагрузку тока равного Iпот:

Тогда

Сводная таблица параметров Таблица 2
|
Название величины
|
Обозначение
|
Значение
|
|
Коэффициент регулируемой обратной связи по скорости
|
bс
|
0,132
|
|
Коэффициент регулируемой обратной связи по току
|
bт
|
0,796
|
|
Максимальное напряжение задатчика скорости
|
Uзmax
|
10
|
|
Коэффициент усиления суммирующего усилителя по каналу задатчика скорости
|
kуз
|
1
|
|
Коэффициент усиления суммирующего усилителя по каналу обратной связи по скорости
|
kуос
|
1,103
|
|
Коэффициент усиления суммирующего усилителя по каналу обратной связи по току
|
kут
|
12,69
|
2.6. Построение статической характеристики электропривода в замкнутой и разомкнутой системе управления.
В соответствии со схемой и при учете всех обратных связей можно записать уравнение:
На первом участке при изменении тока от 0 до тока отсечки Iy действует только обратная связь по скорости Uoc . Этот участок строим по формуле:
При построении первой части статической характеристики необходимо найти точку холостого хода электропривода с координатами (Iя=0; 0), где 0 соответствует 0max и Uз=Uзmax, и точку (1) с координатами (Iу; 1). Остальные точки характеристики можно найти, изменяя ток якоря Iя = (0 .. Iу).

Второй участок характеризуется вступлением в действие отрицательной обратной связи по току, которая увеличивает наклон (уменьшает жесткость) механической характеристики. Задаваясь током I2, немного большим, чем Iу, можно найти вторую точку (2) характеристики на этом участке. Ее координаты (I2; 2):
Найдем коэффициент передачи:


Найдем напряжение пробоя стабилитрона:

Третий участок статической характеристики строится по формуле при изменении Iя=(I2 .. Imax):
Напряжение задания в этом случае находится из условия = 0рmax, Iя=0:


Строим статические характеристики разомкнутой и замкнутой систем управления ЭП:




Рис.4
Статическая ошибка:

2.7.Выводы по разделу
В данном разделе построена статическая характеристика электропривода. Анализируя данную характеристику можно выделить следующие моменты.
Во-первых, рабочий участок, где действует ООС по скорости, оказался жестким, что позволяет регулировать скорость без существенного уменьшения мощности.
Во-вторых, получены значения тока отсечки Iу= 25.65 А - т.е. значение, до достижения которого действует только ОС по скорости. Также найдено значение тока стопорения I2= 26.65 А -т.е. тока, которое является граничным при переходе характеристики с участка где действует ООС по скорости и ООС по току(участок 2), к участку, где действует только ООС по току (участок 3).
В-третьих, наглядно можно убедиться, как режимы защиты влияют на жесткость характеристики.
3.Расчет динамики электропривода
В данном разделе рассматривается возможность получения динамических показателей работы спроектированного электропривода, в соответствии с заданными, т.е. строится и анализируется переходный процесс в системе электропривода.
Переходные процессы играют большую роль в работе ЭП и РМ. Характер их протекания предопределяет производительность машины, качество выпускаемой продукции, а также заметно сказывается на режимах работы ЭП. Вид переходного процесса зависит от свойств всех элементов привода и рабочей машины.
3.1. Составление структурной схемы электропривода для расчета динамики.
На основе функциональной схемы можно составить обобщенную структурную схему замкнутой системы электропривода со всеми обратными связями

Рис. 5 Обобщенная структурная схема замкнутой системы ЭП.
Ограничимся расчетом динамики системы, не учитывая задержанную обратную связь по току, вследствие ее нелинейности и сложности расчетов. Поэтому обобщенную схему можно представить, как:

Рис. 6 Упрощенная структурная схема замкнутой системы ЭП.
Упрощенная структурная схема представляет собой упрощенную математическую модель системы.
3.2. Составление передаточных функций элементов.
3.2.1. Составление передаточной функции двигателя постоянного тока.
В соответствии со структурной схемой тиристорного электропривода постоянного тока с учетом того, что обратная связь по току не действует, а момент статической нагрузки равен нулю, можно составить передаточную функцию двигателя постоянного тока независимого возбуждения в виде:
Так как Тмц<4Тяц.
Рассчитываем коэффициенты:
-фиктивная постоянная времени

- коэффициент затухания

Рис. 7 Структурная схема двигателя по моменту.
На основании упрощенной структурной схемой замкнутой системы электропривода (Uз=const), запишем передаточную функцию двигателя по моменту:
Рассчитаем коэффициент передачи двигателя по моменту:

3.2.2. Составление передаточной функции тиристорного преобразователя.
Передаточную функцию тиристорного преобразователя представим в виде:
Тфтг – постоянная времени датчика скорости (Тфтг =0,004с)
Тфдт – постоянная времени датчика тока
Найдем среднестатистическое запаздывание преобразователя (фазность преобразователя m=6):
Тф – постоянная времени фильтра на входе системы на импульсно-фазового управления (Тф=0,005)
Найдем полную постоянную времени тиристорного преобразователя:
3.2.3. Составление передаточной функции цепи обратной связи по скорости
В общем случае передаточную функцию цепи обратной связи по скорости можно записать:
W(p)=kтгWфтг(p) ,
где коэффициент передачи тахогенератора kтг известен.
Передаточную функцию фильтра представим как:
Вносим поправку в регулируемый коэффициент обратной связи по скорости:
Тогда передаточную функцию цепи обратной связи по скорости можно записать в виде:
,
где (Тфтг =0,004 с)
3.3. Составление передаточной функции системы
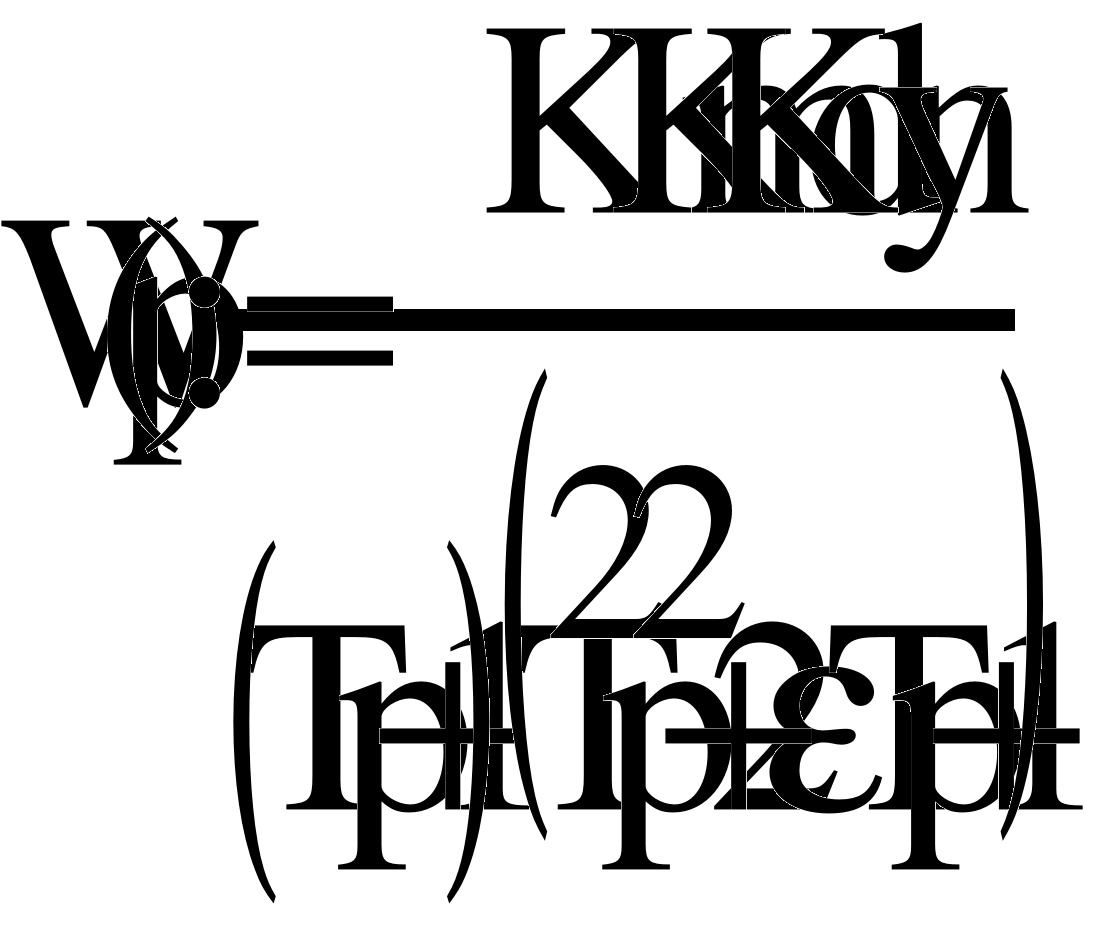
Имеем структурную схему системы электропривода постоянного тока с тиристорным управляемым выпрямителем (двигатель представлен колебательным звеном):
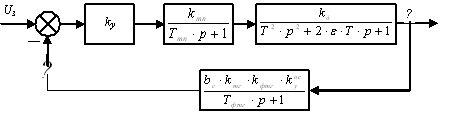
Рис. 8 Расчетная схема электропривода.
Составим передаточную функцию разомкнутой системы:
Wраз(p)= Wу(p)Wтп(p)Wд(p)Wocс(p)
Получим функцию вида:

где -
3.4. Проверка устойчивости системы электропривода.
Для расчета устойчивости системы регулирования применим метод построения логарифмических частотных характеристик. Необходимым и достаточным условием устойчивости по Найквисту является пересечение ЛАЧХ разомкнутой системы оси абсцисс раньше, чем ЛФЧХ пересечет линию, соответствующую ее фазовому сдвигу –.

ЛАЧХ разомкнутой системы:







ЛФЧХ разомкнутой системы:



Рис. 9 ЛАЧХ и ЛФЧХ нескорректированной системы ЭП.
Из построенных ЛАЧХ и ЛФЧХ видно, что система не устойчива, т.к. не удовлетворяет критерию устойчивости Найквиста. Поэтому будем вводить корректирующие устройства.
3.5. синтез корректирующего устройства
Корректирующее устройство должно обеспечивать отсутствие статической ошибки регулирования, ограничить (не более заданного) перерегулирование и время регулирования.



Для нашей передаточной функции системы асимптотическая амплитудно-частотная логарифмическая характеристика будет иметь вид:
По номограммам Солодовникова находим:
Рис. 10 Номограммы для определения частоты среза (а)
и частоты сопряжения (б).
Частота сопряжения:

Необходимый запас устойчивости


Строим графики АЛАЧХ разомкнутой системы, желаемой системы и АЛАЧХ корректирующего устройства.
Рис. 11 АЛАЧХ скорректированной системы.
По виду АЛАЧХ скорректированной системы применим следующее корректирующее устройство:
Рис. 12 схема корректирующего устройства
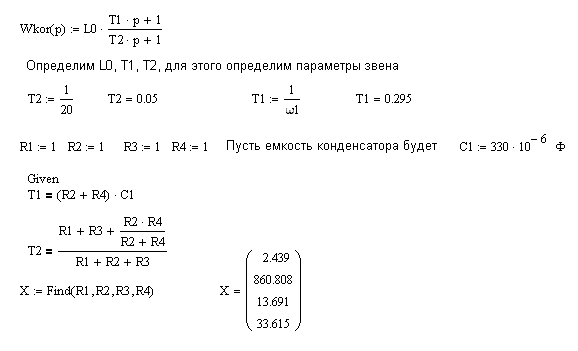
Подберем резисторы (ближайшим приближением) по ряду Е24





Пересчитаем T1 и T2


Получаем


Строим ЛАЧХ и ЛФЧХ системы с внесением в нее корректирующего звена:







Рис. 13 ЛАЧХ и ЛФЧХ скорректированной системы
На рисунке представлено построение ЛАЧХ и ЛФЧХ нашей системы, введя в нее корректирующее устройство, рассчитанное выше. Из данных характеристик по критерию Найквиста находим запасы по амплитуде и по фазе.
Запас по амплитуде:
Запас по фазе:
Как видим, они удовлетворяют нашим требованиям. Значит можно перейти к построению переходного процесса в системе электропривода.
3.6. Построение переходного процесса в системе электропривода по управлению
Рис. 14 Упрощенная структурная схема скорректированной системы
Для построения переходного процесса системы управления электроприводом постоянного тока по управлению необходимо составить передаточную функцию замкнутой системы по управлению, пользуясь правилом:




Рис. 14 Переходная характеристика скорректированной системы по управлению.
3.7. Оценка качества переходного процесса по управлению

- установившееся значение.
-максимальное значение

1. Максимальное динамическое отклонение:

2. Перерегулирование:

3. Время регулирования:
4. Степень затухания:
5. Число колебаний:
6. Показатель колебательности:

7. Статическая ошибка (отклонение в установившемся режиме):

Сводная таблица расчетных параметров
|
Показатели
|
Обозначение
|
Заданные
|
Рассчитанные
|
Запас по амплитуде, дБ
|