РАСЧЕТ И ИССЛЕДОВАНИЕ ЛИНЕЙНОЙ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ С ИСТОЧНИКАМИ ПОСТОЯННЫХ ВОЗДЕЙСТВИЙ И ПРИ ЗАДАННОЙ УГЛОВОЙ ЧАСТОТЕ ПИТАЮЩЕГО НАПРЯЖЕНИЯ
РАСЧЕТ И ИССЛЕДОВАНИЕ ЛИНЕЙНОЙ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ С ИСТОЧНИКАМИ ПОСТОЯННЫХ ВОЗДЕЙСТВИЙ И ПРИ ЗАДАННОЙ УГЛОВОЙ ЧАСТОТЕ ПИТАЮЩЕГО НАПРЯЖЕНИЯ
СОДЕРЖАНИЕ
Введение........................ ............ ............ ............ ..........................................3
Часть 1. Расчет цепи постоянного тока........................................................3
- Задание и исходные данные для расчета...................................................3
- Составление системы уравнений для расчёта тока во всех ветвях схемы по законам Кирхгофа .........................……………………….……4
- Расчет цепи по методу контурных токов...................................................5
- Расчет цепи по методу узловых потенциалов...........................................7
- Сравнение результатов, полученных разными методами........................9
- Расчет цепи тока в ветви по методу эквивалентного генератора……..10
- Расчет баланса мощностей цепи………………………………………...13
- Потенциальная диаграмма замкнутого контура……………………….14
Часть 2. Расчет цепи переменного тока…………………..…………15
2.1.Задание и исходные данные для расчета……………………………….15
2.2.Система уравнений цепи по законам Кирхгофа для мгновенных значений токов и напряжений.................................................................16
2.3.Расчет эквивалентного сопротивления указанных ветвей ……………17
2.4.Расчет токов цепи по методу контурных токов………………………...18
2.5. Расчет токов цепи по методу узловых потенциалов…………………..20
2.6. Сравнение результатов, полученных разными методами......................22
2.7.Расчет полной, активной и реактивной мощностей цепи…………..…23
2.8.Определить мгновенное значение тока и напряжения………………..24
2.9.Векторная диаграмма токов и топографическая диаграмма напряжений цепи..............................................................................................................25
Заключение………………………………………………………………………28
Список литературы...............................................................................................29
Введение
Для современного промышленного производства характерно широкое внедрение автоматизированного электропривода основы механизации и комплексной автоматизации технологических процессов. Совершенствование систем автоматизированного электропривода с использованием новейших достижений науки и техники является одним из непременных условий при решении задач всемерного повышения эффективности общественного производства, ускорения роста производительности труда и улучшения качества выпускаемой продукции.
Современный электропривод определяет собой уровень силовой электровооруженности труда и благодаря своим преимуществам по сравнению со всеми другими видами приводов является основным и главным средством автоматизации рабочих машин и производственных процессов.
Электропривод определяется как электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением [1].
Она содержит преобразовательное устройство (ПРУ), определяемое как электротехническое устройство, преобразующее род тока, напряжение, частоту и изменяющее показатели качества электрической энергии, предназначенное для создания управляющего воздействия на электродвигательное устройство.
Электродвигательное устройство (ЭДУ) является электротехническим устройством электрической машиной, предназначенным для преобразования электрической энергии в механическую или механической энергии в электрическую.
Передаточное устройство (ПУ) предназначено для передачи механической энергии от электродвигательного устройства электропривода к исполнительному органу рабочей машины (ИОРМ) и согласования вида и скоростей их движения.
Управляющее устройство (УУ) является электротехническим устройством, предназначено для управления преобразовательным, электродвигательным и передаточным устройствами. Управляющее устройство, как правило, содержит информационную часть, получающую информацию от задатчиков (сигнал задания) и датчиков обратной связи (сигнал о состоянии привода) и в соответствии с заданными алгоритмами вырабатывает сигналы управления.
Посредством системы электропривода приводятся в движение рабочие органы технологических (производственных) машин и осуществляется управление преобразованной энергией. Под управлением здесь понимают организацию процесса преобразования энергии, обеспечивающую в статических и динамических условиях требуемые режимы работы технологических машин. Если основные функции управления выполняются без непосредственного участия человека (оператора), то управление называют автоматическим, а электропривод автоматизированным.
Параметрами электропривода являются скорость, нагрузка, диапазон регулирования, жесткость механической характеристики и электромеханическая постоянная времени.
Для управления электроприводами применяется множество различных устройств, однако, в настоящее время наиболее рациональным кажется использование тиристорного и транзисторного управления электроприводами. Для этой цели в разомкнутой или замкнутой системах управления электроприводами используют управляемые выпрямители (для систем с двигателями постоянного тока) и регуляторы напряжения или преобразователи частоты (для систем с асинхронными двигателями).
Часть 1. Расчет цепи постоянного тока
1.1. Задание и исходные данные для расчета
- Изобразить цепь, подлежащую расчету, выписать значения параметров элементов.
- Составить системы уравнений для расчёта тока во всех ветвях схемы по законам Кирхгофа.
- Найти силу тока во всех ветвях схемы методом контурных токов (преобразовать источники токов в источники ЭДС).
- Вернуться к исходной схеме, преобразовав полученный источник ЭДС в источник тока.
- Найти силу тока во всех ветвях исходной схемы методом узловых потенциалов.
- Результаты 4) и 5) заданий занести в таблицу и сравнить между собой.
- Составить баланс мощностей в исходной схеме (с источником тока); вычислить отдельно суммарную мощность источников и суммарную мощность нагрузок (сопротивлений). Сравнить полученные результаты.
- Определить ток I2 методом эквивалентного генератора
- Начертить потенциальную диаграмму для замкнутого контура BGCFDMB (Направление обхода – по часовой стрелке).
Дано:
R1=40 Ом; R2=10 Ом;
R3=40 Ом;
R4=15Ом; R5=25 Ом;
R7=30 Ом; R8=20 Ом;
E12=5 B; E21=15 B; E42=25 B;
E52=20 B; E72=20 B;
E81=30 B;
J=2 A
Рис.1.1
1.2.Составление системы уравнений для расчёта тока во всех ветвях схемы по законам Кирхгофа
По первому закону Кирхгофа (Алгебраическая сумма токов в узле равна нулю) будем иметь:
A) J-I1+I5+I8=0
B) –I5+I7-I4=0
C) –I3+I2+I4-I8=0
D) –J+I1-I7+I3-I2=0
По второму закону Кирхгофа (Алгебраическая сумма падений напряжений в замкнутом контуре равна алгебраической сумме ЭДС входящих в этот контур)
- I1*R1+I7*R7+I5*R5=E12+E72+E52
- I3*R3+I7*R7+I4*R4=E72+E42
- I2*R2+I3*R3 =E21
- I8*R8-I5*R5+I4*R4=E81-E52+E42
1.3. Расчет цепи по методу контурных токов
Найти силу тока во всех ветвях схемы методом контурных токов.
Преобразование источника тока в источник ЭДС.
Рис.1.2
Составление уравнений по методу контурных токов для выбранных контуров
- I11*(R1+R7+R5)-I22*R7-0-I44*R5=E12-E11+E72+E52
- -I11*R7+I22*(R7+R3+R4)-I33*R3-I44*R4=-E72-E42
- 0-I22*R3+I33*(R3+R2)-0=E21
- -I11*R5-I22*R4+0+I44*(R5+R4+R8)=E42+E81-E52
Рассмотрим часть программы, написанную для расчета токов в цепи по методу контурных токов
Проверка подтвердила правильность решения
I1= 1,339 А I5= -0,724 А
I2= -0,483 А I7= 0,318 А
I3= 0,496 А I8= 0.063 А
I4= 1,042 А
1.4. Расчет цепи по методу узловых потенциалов
Найти силу тока во всех ветвях исходной схемы методом узловых потенциалов.
Вернуться к исходной схеме
По закону Ома для участка цепи составляем выражения для токов схемы.
а = 0
A: fa+E12-I1*R1-E11=fd I1=(E12-fd-E11)*G1
fa+I5*R5-E52=fb I5=(fb+E52)*G5
fa-E81+I8*R8=fc I8=(fc+E81)*G8
B: fb-E72+I7*R7=fd I7=(fd+E72-fb)*G7
fb+E42-I4*R4=fc I4=(fb-fc+E42)G4
С: fc-I3*R3=fd I3=(fc-fd)*G3
fc+I2*R2-E21=fd I2=(fd+E21-fc)*G2
Запишем уравнения составленные согласно первому закону Кирхгофа для ненулевых узлов:
B: -I5+I7-I4=0
D: I1-I7+I3-I2=0
C: I2-I3+I4-I8=0
Далее рассмотрим часть программы, составленной для нахождения токов в цепи по методу потенциалов
1.5. Сравнение результатов, полученных разными методами
Результаты 4) и 5) заданий занесли в таблицу и сравнили между собой.
|
МЕТОДОМ КОНТУРНЫХ ТОКОВ |
МЕТОДОМ УЗЛОВЫХ ПОТЕНЦИАЛОВ |
|
|
I1 |
1.339A |
1.339A |
|
I2 |
-0.483A |
-0.483A |
|
I3 |
0.496 A |
0.496 A |
|
I4 |
1.042 A |
1.042 A |
|
I5 |
-0.724 A |
-0.724 A |
|
I6 |
0.318 A |
0.318 A |
|
I8 |
0.063 A |
0.063 A |
Таблица 1.1
1.6. Расчет цепи тока в ветви по методу эквивалентного генератора
Определение I2 методом эквивалентного генератора:
I2 методом эквивалентного генератора вычисляется по формуле:
I2=Uxx/Rvx+R2
где: UXX – напряжение холостого хода , RVX – входное сопротивление
 Найдём UXX, исключив из схемы R2.Т.к. мы исключили из схемы R2 нам необходимо пересчитать токи в полученных контурах.
Найдём UXX, исключив из схемы R2.Т.к. мы исключили из схемы R2 нам необходимо пересчитать токи в полученных контурах.
Воспользуемся методом контурных токов:
- I11(R3+R7+R4)-I22R7-I33R4=-E42-E72
- –I11R7+I22(R1+R7+R5)-I33R5=E12-E11+E72+E52
- –I11R4-I22R5+I33(R5+R4+R8)=E81+E42-E52
Найдём RVX ,для чего оставим в (рис.3) только сопротивления, после чего свернём её.
Преобразуем схему, используя правило преобразования сопротивлений из звезды ABDC с сопротивлениями R7, R5, R4 (РИС.4) в
треугольник с сопротивлениями R74,R54,R57. (РИС.5)
1.7. Расчет баланса мощностей цепи
Мощность потребителей (Вт)
Мощности источников тока (Вт)
1.8 Потенциальная диаграмма замкнутого контура
Построим диаграмму контура BCFDMB
Рис.1.9
Часть 2. Расчет цепи переменного тока
2.1.Задание и исходные данные для расчета
1. Изобразить цепь, подлежащую расчету, выписать значения параметров элементов.
2.Записать систему уравнений по законам Кирхгофа для мгновенных значений токов и напряжений;
3. Определить эквивалентное сопротивление двух ветвей схемы (номера ветвей: 3 и 4).
4.Определить действующие значения токов во всех ветвях (алгебр. форма):
а) методом контурных токов,
б) методом узловых потенциалов (узел с нулевым потенциалом В );
5. Сравнить полученные результаты в таблице.
6. Определить мгновенное значение тока и напряжения для указанной ветви: 4) и построить на одной координатной плоскости их графики i(t) и u(t).
7. Построить векторную диаграмму токов внешнего контура и топографическую (потенциальную) диаграмму напряжений внешнего контура (обход по часовой стрелке)
8. Определить активную, реактивную и полную мощности всей цепи.
Дано:
e32(t)=
R1=20 Oм; R2=10 Oм; R3=10 Oм;
R4=25 Oм; C1=100мкФ; С2=200мкФ;
С3=50мкФ; L4=50мГн; С5=100мкФ.
L5=150мГн.
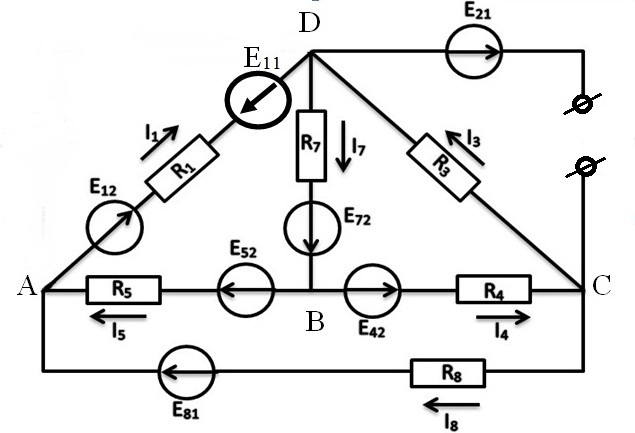
Рис.2.1
2.2.Система уравнений цепи по законам Кирхгофа для мгновенных значений токов и напряжений.
По первому закону Кирхгофа:
A: i2(t)-i4(t)-i1(t)=0
B, D: i1(t)-i2(t)-i5(t)-i3(t)=0
C: i5(t)+i3(t)+i4(t)=0
По второму закону Кирхгофа:
- u3(t)-u5(t)=e32(t)
- –u1(t)-u2(t)=0
- u2(t)+u4(t)-u5(t)=0
Распишем значения:
u3(t)= uR3(t)+ uC3(t) uR3(t)= i3(t)*R3 uC3(t)=
u5(t)= uL5(t)+ uC5(t) uL5(t)=L5 uC5(t)=
u1(t)= uR1(t)+ uC1(t) uR1(t)= i1(t)*R1 uC1(t)=
u2(t)= uC2(t)+ uR2(t) uR2(t)= i2(t)*R2 uC2(t)=
u4(t)= uR4(t)+ uL4(t) uR4(t)= i4(t)*R4 uL4(t)=L4
Перепишем исходное:
- i3(t)*R3 + - ( L5 + )= e32(t)
- - i1(t)*R1 - - i2(t)*R2 -
- i2(t)*R2 + i4(t)*R4 + L4 L5 = 0
2.3.Расчет эквивалентного сопротивления указанных ветвей.
Находим эквивалентное сопротивление 3 и 4 ветвей, оставляя только эти ветви.
Рис.2.2
преобразовав сопротивления в комплексном виде.
Рис.2.3 Рис.2.4
2.4.Расчет токов цепи по методу контурных токов
Найти силу тока во всех ветвях схемы методом контурных токов.
Вычерчивание комплексной схемы замещения (рис.2.6) и нахождение сопротивления в комплексной форме.
Рис.2.5
Составление уравнений по методу контурных токов для выбранных контуров
- I11(Z1+Z2)-I22Z2-0=0
- –I11+I22(Z2+Z4+Z5)-I33Z5=5
- 0-I22Z5+I33(Z3+Z5)=-E32
Рассмотрим часть программы, написанную для расчета токов в цепи по методу контурных токов
ПРОВЕРКА ПОДТВЕРДИЛА ПРАВИЛЬНОСТЬ РЕШЕНИЯ
I1= 0.141+0.055j A
I2= -0.281-0.11j A
I3=0.599+0.124j A
I4=-0.422-0.165j A
I5=-0.178+0.04j A
2.5. Расчет токов цепи по методу узловых потенциалов
Рис.2.6
Найти силу тока во всех ветвях исходной схемы методом узловых потенциалов.
По закону Ома для участка цепи составляем выражения для токов схемы.
( в комплексной форме)
Пусть, c = 0
c-E32+I3Z3=b I3=( b+E32)Y3
c +I5Z5=b I5= b Y5
c +I4Z4=a I4= a Y4
b –I2Z2=a I2=( b- a)Y2
b +I1Z1=a I2=( a- b)Y1
Полученные выражения для токов подставим в уравнения, составленные по первому закону Кирхгофа для ненулевых узлов
- - a Y4+( b- a)Y2-( a- b)Y1=0
- ( a- b)Y1-( b- a)Y2- b Y5-( b+E32)Y3=0
Перепишем систему в более удобном виде

Обозначим A = fa C = fb
Далее рассмотрим часть программы, составленной для нахождения токов в цепи по методу потенциалов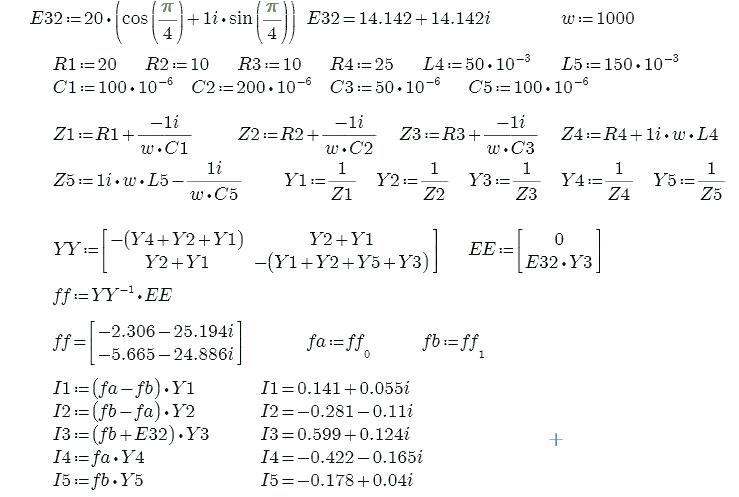
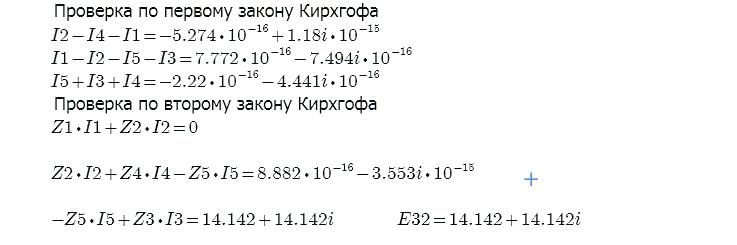
ПРОВЕРКА ПОДТВЕРДИЛА ПРАВИЛЬНОСТЬ РЕШЕНИЯ
I1= 0.141+0.055j A
I2= -0.281-0.11j A
I3=0.599+0.124j A
I4=-0.422-0.165j A
I5=-0.178+0.04j A
2.6. Сравнение результатов, полученных разными методами
|
МЕТОДОМ КОНТУРНЫХ ТОКОВ |
МЕТОДОМ УЗЛОВЫХ ПОТЕНЦИАЛОВ |
|
|
I1 |
0.141+0.055j A |
0.141+0.055j A |
|
I2 |
-0.281-0.11j A |
-0.281-0.11j A |
|
I3 |
0.599+0.124j A |
0.599+0.124j A |
|
I4 |
-0.422-0.165j A |
-0.422-0.165j A |
|
I5 |
-0.178+0.04j A |
-0.178+0.04j A |
Таблица 2.1
2.7.Расчет полной, активной и реактивной мощностей цепи
Полная комплексная мощность вычисляется по формуле:
Su=Pu+ iQu ,
Где Pu и Qu – активная и реактивная мощности соответственно.
Далее рассмотрим часть программы, составленной для нахождения полной мощности цепи.
1.Найдем сопряженное значение токов цепи (токи найдены по методам указанным выше в комплексной форме).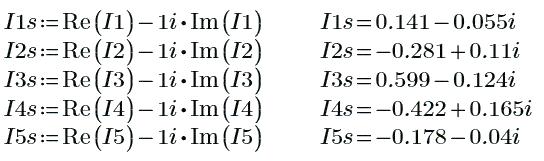
Запишем формулу для нахождения полной мощности в комплексной форме
Полная комплексная мощность S = 10.232+6.719j
Активная мощность P =10.232 Вт
Реактивная мощность Q = 6.719ВАр
Полная мощность S =12.241ВА
2.8.Определить мгновенное значение тока и напряжения
Определить мгновенное значение тока и напряжения для указанной ветви: 4) и построить на одной координатной плоскости их графики i(t) и u(t).
i4(t) и u4(t) находятся по формулам:
i4(t)=I4m*sin(*t+) и u4(t)=u4m*sin(*t+ u4)
Далее рассмотрим часть программы, составленной для нахождения тока i4(t) и напряжения u4(t) :
Построим графики i4(t) и u4(t):
рис.2.7
2.9.Векторная диаграмма токов и топографическая диаграмма напряжений цепи
Построить векторную диаграмму токов внешнего контура и топографическую (потенциальную) диаграмму напряжений внешнего контура ABCDEFGA (обход по часовой стрелке)
Рис.2.8
Рассмотрим часть программы для построения векторной диаграммы токов
Рассмотрим часть программы для построения топографической диаграммы напряжений
Заключение
Современный электропривод определяет собой уровень силовой электровооруженности труда и благодаря своим преимуществам по сравнению со всеми другими видами приводов является основным и главным средством автоматизации рабочих машин и производственных процессов.
Электропривод определяется как электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение исполнительных органов рабочей машины и управления этим движением [1].
Она содержит преобразовательное устройство (ПРУ), определяемое как электротехническое устройство, преобразующее род тока, напряжение, частоту и изменяющее показатели качества электрической энергии, предназначенное для создания управляющего воздействия на электродвигательное устройство.
Электродвигательное устройство (ЭДУ) является электротехническим устройством электрической машиной, предназначенным для преобразования электрической энергии в механическую или механической энергии в электрическую.
Посредством системы электропривода приводятся в движение рабочие органы технологических (производственных) машин и осуществляется управление преобразованной энергией. Под управлением здесь понимают организацию процесса преобразования энергии, обеспечивающую в статических и динамических условиях требуемые режимы работы технологических машин. Если основные функции управления выполняются без непосредственного участия человека (оператора), то управление называют автоматическим, а электропривод автоматизированным.
Параметрами электропривода являются скорость, нагрузка, диапазон регулирования, жесткость механической характеристики и электромеханическая постоянная времени.
Список литературы
- Л.А.Бессонов Теоретические основы электротехники. Электрические цепи. Москва, Издательство «Высшая школа»,2010.
- И.Н.Добротворский. Теория электрических цепей: учебник для техникумов. Москва, Издательство «Радио и связь»,2009.
- Б.А.Волынский, Е.Н.Зейн, В.Е.Шатерников. Электротехника. Москва, Издательство «Энергоатомиздат»,2007.
D
B
I
A
R8
R4
E42
R2
E31
E61
R1
E52
R5
E11
R6
E21
R3
C
D
III
II
I
C
A
IV
B
A
A
III
II
I
E11
IV
B
R6
C
A
R8
R4
E42
R2
E31
E61
R1
E52
R5
E11
E21
R3
I*R1
D
2
1
3
4
E11
D
C
B
A
33
11
22
B
A
R8
R4
R7
R1
R5
R3
C
D
РИС.1.4
3
2
1
C3
L3
R4
B
C
L4
ZC3
ZL3
ZR4
B
C
ZL4
i4
i5
i3
i1
i2
e52
A
C
2
3
1
Z4
Z2
Z3
5
Z1
B
A
B
B
C
C
A
R5
e52
C5
R4
R1
L4
i4
i5
i1
A
C
B
D
G
F
E
B
РАСЧЕТ И ИССЛЕДОВАНИЕ ЛИНЕЙНОЙ ЭЛЕКТРИЧЕСКОЙ ЦЕПИ С ИСТОЧНИКАМИ ПОСТОЯННЫХ ВОЗДЕЙСТВИЙ И ПРИ ЗАДАННОЙ УГЛОВОЙ ЧАСТОТЕ ПИТАЮЩЕГО НАПРЯЖЕНИЯ