Проектирование системы автоматического регулирования
PAGE 2
Контрольная работа
Проектирование системы автоматического регулирования
Содержание
1. Исходные данные для моделирования САР
1.1. Описание САР и ее функциональная схема
1.2 Передаточные функции объекта регулирования,
элементов САР и структурная схема системы
Определение параметров типового закона регулирования
2.1. Моделирование исходного варианта САР
2.2 . Расчет параметров типового закона регулирования
2.3. Компьютерное моделирование скорректированной САР
3. Выводы по работе
Литература
1. Исходные данные для моделирования САР
1.1. Описание САР и ее функциональная схема
Схема САР [4] показана на рис. 1. Принцип ее работы следующий. Напряжение генератора U измеряется трансформатором ТV1 и выпрямителем V1…V6 преобразуется в напряжение U3. Напряжение U3 подается на вход системы встречно задающему напряжению Uо. В результате получается разность напряжений U = Uo – U3. При уменьшении напряжения U3 разность U возрастает, что приводит к увеличению напряжения возбуждения Uв генератора и к восстановлению его напряжения U до заданного значения. При увеличении напряжения Uв разность U уменьшается, что вызывает снижение напряжения возбуждения генератора, а следовательно, и его напряжения U до требуемого значения. Таким образом, само отклонение регулируемой величины (напряжения генератора) от заданного значения вызывает изменение регулирующего воздействия так, чтобы уменьшить это отклонение и вернуть регулируемую величину к заданному значению.

Рис. 1. Упрощенная принципиальная схема САР: G1 – синхронный генератор; G2 – генератор возбуждения;
А2 – электромашинный усилитель; А1 – электронный
усилитель; Z – нагрузка; VD1…VD6, TV1 – элементы
обратной связи; R0 – задающий резистор
Динамические свойства объекта регулирования и элементов САР описываются следующими дифференциальными и алгебраическими уравнениями.
Синхронный генератор G1:
, (1)
где – постоянная времени (=1,2 с);
– передаточный коэффициент по регулирующему воздействию
(=30);
– передаточный коэффициент по возмущающему воздействию
(=1,64 В/А).
Возбудитель – генератор постоянного тока G2:
, (2)
где – постоянная времени (= 0,5 с);
– передаточный коэффициент (=2).
Электромашинный усилитель А2:
, (3)
где – постоянная времени (=0,15 с);
b – коэффициент демпфирования (b =1,17);
– коэффициент усиления электромашинного усилителя
по напряжению (=2).
Электронный усилитель А1:
, (4)
где – коэффициент усиления электронного усилителя по напряжению
(варьируемая величина k = 1…35).
Понижающий трансформатор TV1:
, (5)
где – передаточный коэффициент (коэффициент трансформации =0,001).
Выпрямительная схема Ларионова VD1…VD6:
, (6)
где – передаточный коэффициент схемы Ларионова (=2,34).
Переменные величины (входные, выходные величины в приведенных выше уравнениях, имеют следующий физический смысл):
U – напряжение на зажимах синхронного генератора, В;
Uв – напряжение на обмотке возбуждения синхронного генератора (выходное напряжение возбудителя) В;
I – ток нагрузки синхронного генератора, А;
U2 – выходное напряжение электромашинного усилителя, В;
U1 – напряжение на обмотке управления электромашинного усилителя (выходное напряжение электронного усилителя), В;
U3 – сигнал (напряжение) обратной связи, В;
U0 – задающий сигнал (задающее напряжение), В;
U - U0 - U3 – сигнал рассогласования, В.
Номинальное напряжение синхронного генератора Uн = 6300 В. Его номинальный ток Iн = 688 А.
Входные воздействия САР:
- задающее воздействие U0 (его значение подбирается в процессе моделирования таким, чтобы при номинальном токе нагрузки Iн = 688 А напряжение на выходе САР было равно номинальному значению напряжения Uн = 6300 В);
- максимальное возмущающее воздействие – скачкообразное изменение тока нагрузки I от Iх.х. = 0 до Iн = 688 А (Iх.х. – ток холостого хода генератора). Отклонение напряжения на зажимах генератора U в установившемся режиме от номинального значения не должно превышать
5% (315 В).
Из анализа принципиальной схемы (рис. 1) и приведенного описания САР следует, что объектом регулирования является синхронный генератор G1, который можно представить в виде функциональной схемы, показанной на рис.
Рис. Синхронный генератор как объект регулирования: U – регулируемая величина; Uв – регулирующее воздействие; I – возмущающее воздействие
Из физического принципа работы синхронного генератора и анализа уравнения (1) следует, что при увеличении (уменьшении) напряжения возбуждения Uв напряжение на зажимах генератора U увеличивается (уменьшается). Влияние возмущения (тока нагрузки I) на напряжение U, приводит к обратному эффекту: при росте значения тока нагрузки I напряжение U уменьшается, а при снижении тока I напряжение U увеличивается.
В рассматриваемой САР (рис.1) генератор возбуждения G2 выполняет роль исполнительного органа (элемента), который можно представить в виде функционального элемента, показанного на рис.3.
Рис. 3. Возбудитель, как
исполнительный орган
В САР (рис.1.) имеется два усилителя А1 и А Первый выполняет роль усилителя напряжения, а второй – усилителя мощности. Как функциональные элементы их можно изобразить в виде, приведенном на рис.4.
а б
Рис. 4. Функциональные схемы: а – электронного
и б – электромашинного усилителя
В цепи (канале) обратной связи САР (рис.1) имеются два элемента: трансформатор напряжения TV1 и выпрямитель VD1…VD6. Первый элемент можно трактовать как воспринимающий орган (ВО), а второй – как преобразующий орган (ПО) (рис. 5).
а б
Рис. 5. Функциональные схемы элементов, входящих в канал
обратной связи: а – трансформатора TV1; б – выпрямителя VD1…VD6
В рассматриваемой САР (рис. 1.) применена гальваническая схема сравнения сигналов (задающего U0 и сигнала обратной связи U3). Ее в виде функциональной схемы можно представить в виде, приведенном на рис. 6.
Рис. 6. Функциональная схема сравнивающего органа
Объединяя элементарные функциональные схемы (рис. 2 … 6) в соответствии с принципиальной схемой (рис. 1), функциональная схема САР примет вид, показанный на рис. 7.

Рис. 7. Функциональная схема САР: ОР – объект регулирования;
ИО – исполнительный орган; УО1, УО2 – усилительные органы
1 и 2; ВО – воспринимающий орган; ПО – преобразующий орган; СО – сравнивающий орган
1.2 . Передаточные функции объекта регулирования, элементов САР
и структурная схема системы
Объект регулирования (рис.2) имеет две входных величины и одну выходную. Следовательно, он будет иметь передаточные функции по каждому каналу: по регулирующему Wp(p) и по возмущающему воздействию WВ(p).
Передаточную функцию объекта регулирования по регулирующему воздействию Wp(p), руководствуясь принципом суперпозиции, определим на основе (1) при I=0.
,
преобразовав его по Лапласу как
,
где U(p) и UB(p) – соответственно изображения по Лапласу регулируемой
величины U и управляющего воздействия .
Из последнего выражения (в левой части) вынесем за скобки U(p)
и на его основе определим
. (7)
Аналогично найдём передаточную функцию объекта регулирования по возмущающему воздействию WВ(p), приняв UB=0:
;
;
;
, (8)
где I(p) – изображение по Лапласу возмущающего воздействия I.
С учётом передаточных функций (7 и 8), структурную схему объекта регулирования можно представить в виде, показанном на рис.8.
|
|
|
Рис. 8. Структурная схема объекта регулирования
|
Передаточные функции остальных элементов САР, определенные аналогично на основе уравнений (2), (3), (4), (5), (6), имеют следующий вид:
исполнительного органа ; (9)
усилительного органа 2 ; (10)
усилительного органа 1 ; (11)
воспринимающего органа ; (12)
преобразующего органа . (13)
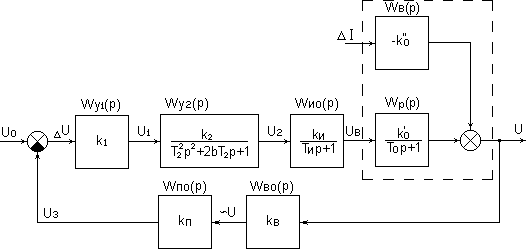
На основе функциональной схемы САР (рис. 7) и найденных передаточных функций, путём замены объекта регулирования в этой схеме его структурной схемой (рис. 8) и замещением функциональных обозначений элементов соответствующими им передаточными функциями (9), (10), (11), (12), (13), составим структурную схему системы (рис.9).
|
|
|
Рис. 9. Структурная схема САР напряжения синхронного генератора
|
Структурная схема САР (рис. 9) является математической моделью, на основе которой выполняется компьютерное моделирование системы в среде ПК «МВТУ».
2 . Определение параметров типового закона регулирования
2 .1. Моделирование исходного варианта САР
Моделирование САР выполним в среде программного комплекса «Моделирование в технических устройствах (ПК «МВТУ») /6, 7/, в котором используется метод структурного моделирования, базирующийся на математических моделях САР в виде их структурных схем. Поэтому в первую очередь на основе структурной схемы исходной системы (рис. 9) составляем структурную схему моделирования (рис.10), заменяя звенья САР соответствующими блоками из общетехнической библиотеки ПК “МВТУ” . Для формирования задающего воздействия U0 воспользуемся блоком «Константа», а для создания возмущающего воздействия I используем блок «Ступенчатое воздействие» /6 приложение А/.
Параметры передаточных функций (7–13) исходной структурной схемы (рис. 9) следующие: Т0 = 1,2 с; = 30;  = 1,64 В/А; kв = 0,001;
= 1,64 В/А; kв = 0,001;
kп = 2,34;  = 1…35; Т2 = 0,15 с; b = 1,17; = 2; ТИ = 0,5 с; =
= 1…35; Т2 = 0,15 с; b = 1,17; = 2; ТИ = 0,5 с; =
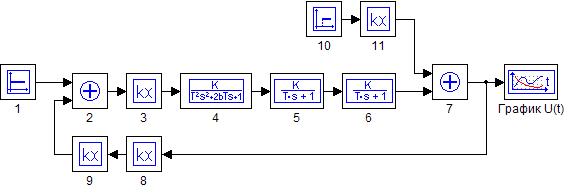
Рис. 10. Структурная схема моделирования САР напряжения
синхронного генератора в среде ПК “МВТУ”
Руководствуясь методикой подготовки исходных данных /6, 7/, выберем метод и зададим параметры интегрирования:
- метод интегрирования «Рунге-Кутта классический 45»;
- исходя из наибольшей постоянной времени Т0 = 1,2 с, принимаем первоначальное время интегрирования 120 с;
- исходя из наименьшей постоянной времени Т2 = 0,15 с, принимаем первоначальные значения шага интегрирования: максимального 0,015 с, минимального 0,00016 с;
- число точек выдачи данных 1600 или интервал выдачи данных 0,015 с;
- точность интегрирования 0,001 с.
При оценке качества процесса регулирования будем исходить из следующих требований, предъявляемых к замкнутым САР в статическом и динамическом режиме:
- статическая ошибка Uст 315 В;
- время регулирования при пятипроцентной «трубке» = ± 0,05 Uуст
tр 5 с;
- перерегулирование 20%;
- количество перерегулирований n
С учетом числовых значений параметров передаточных функций САР параметры блоков структурной схемы моделирования (рис. 10) будут иметь значения, приведенные в таблице 1. Первоначальное значение задающего воздействия U0 примем 1, а возмущения I – 0. необходимое значение U0 определим путем его подбора в процессе моделирования системы.
Таблица 1
Значения параметров блоков структурной схемы (рис. 10.)
|
Блок
|
Параметр
|
Значение
|
|
2
|
Весовые множители для каждого из входов
|
+1 –1
|
|
3
|
Коэффициент усиления
|
(1…35)
|
|
4
|
Коэффициент усиления
|
2
|
|
|
Постоянная времени
|
0,15
|
|
|
Коэффициент демпфирования
|
1,17
|
|
|
Начальные условия
|
0 0
|
|
5
|
Коэффициент усиления
|
2
|
|
|
Постоянная времени
|
0,5
|
|
|
Вектор начальных условий
|
0
|
|
6
|
Коэффициент усиления
|
30
|
|
|
Постоянная времени
|
1,2
|
|
|
Вектор начальных условий
|
0
|
|
7
|
Весовые множители для каждого из входов
|
+1 +1
|
|
8
|
Коэффициент усиления
|
0,001
|
|
9
|
Коэффициент усиления
|
2,34
|
|
11
|
Коэффициент усиления
|
–1,64
|
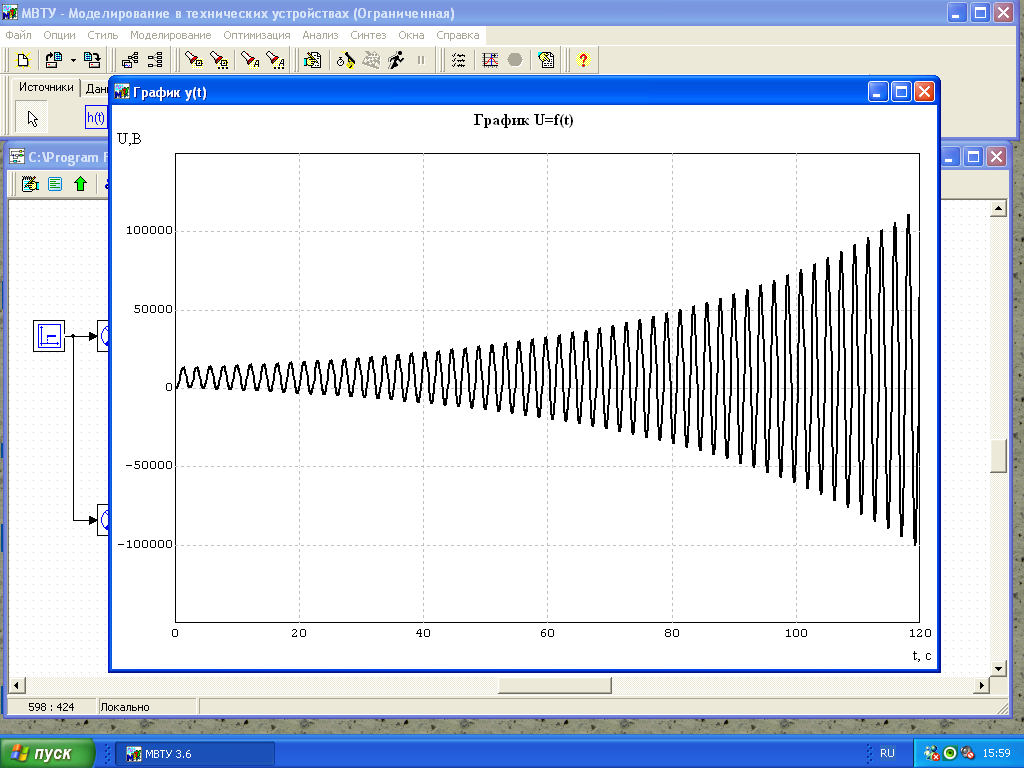
В результате моделирования САР, в соответствии с данными таблицы 1, получены графики переходных процессов при различных значениях коэффициента усиления k1 (рис. 11, 12), анализ которых показывает следующее:
- критический коэффициент усиления k1 кр = 29 (рис.11,б);
- процесс регулирования при коэффициенте усиления больше критического неустойчивый (рис. 11,а);
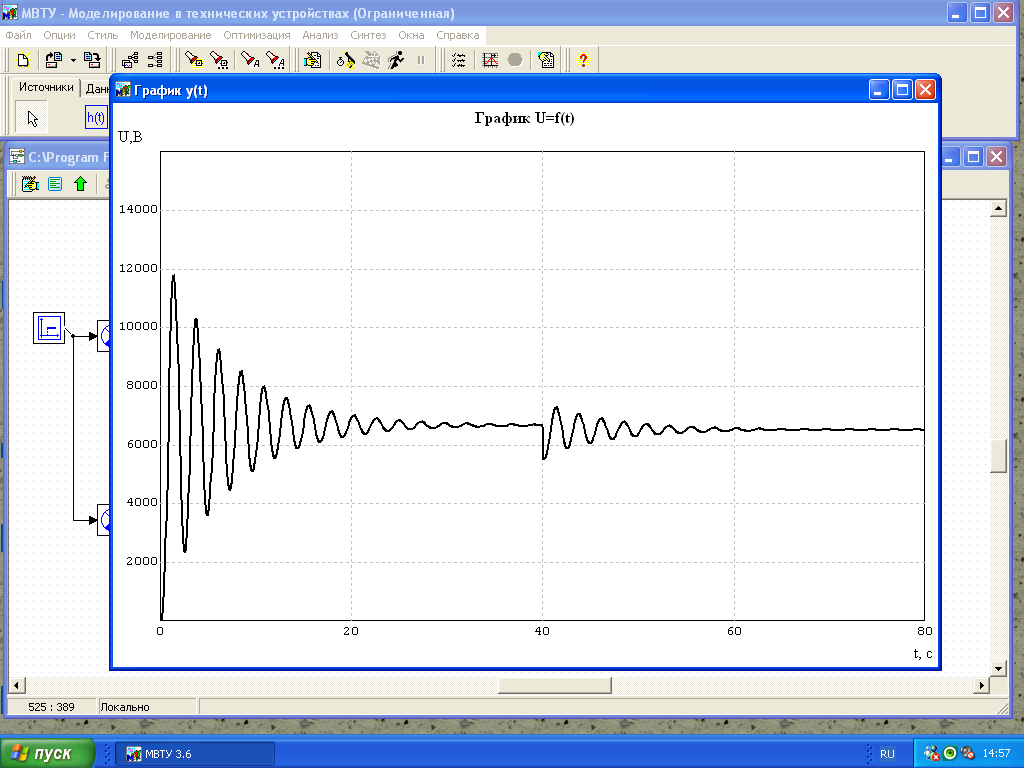
- при коэффициенте усиления ниже критического на 20%, обеспечивающем двадцатипроцентный запас устойчивости системы, имеет явно выраженный колебательный характер, неудовлетворительный с позиции качественных показателей САР (рис. 12,а);
- из визуального анализа графика (рис. 12б) следует, что при коэффициенте усиления k1 = 5 обеспечиваются удовлетворительные динамические показатели качества система ( %, n, tp), но не обеспечивается требуемое значение статической ошибки.
а
б
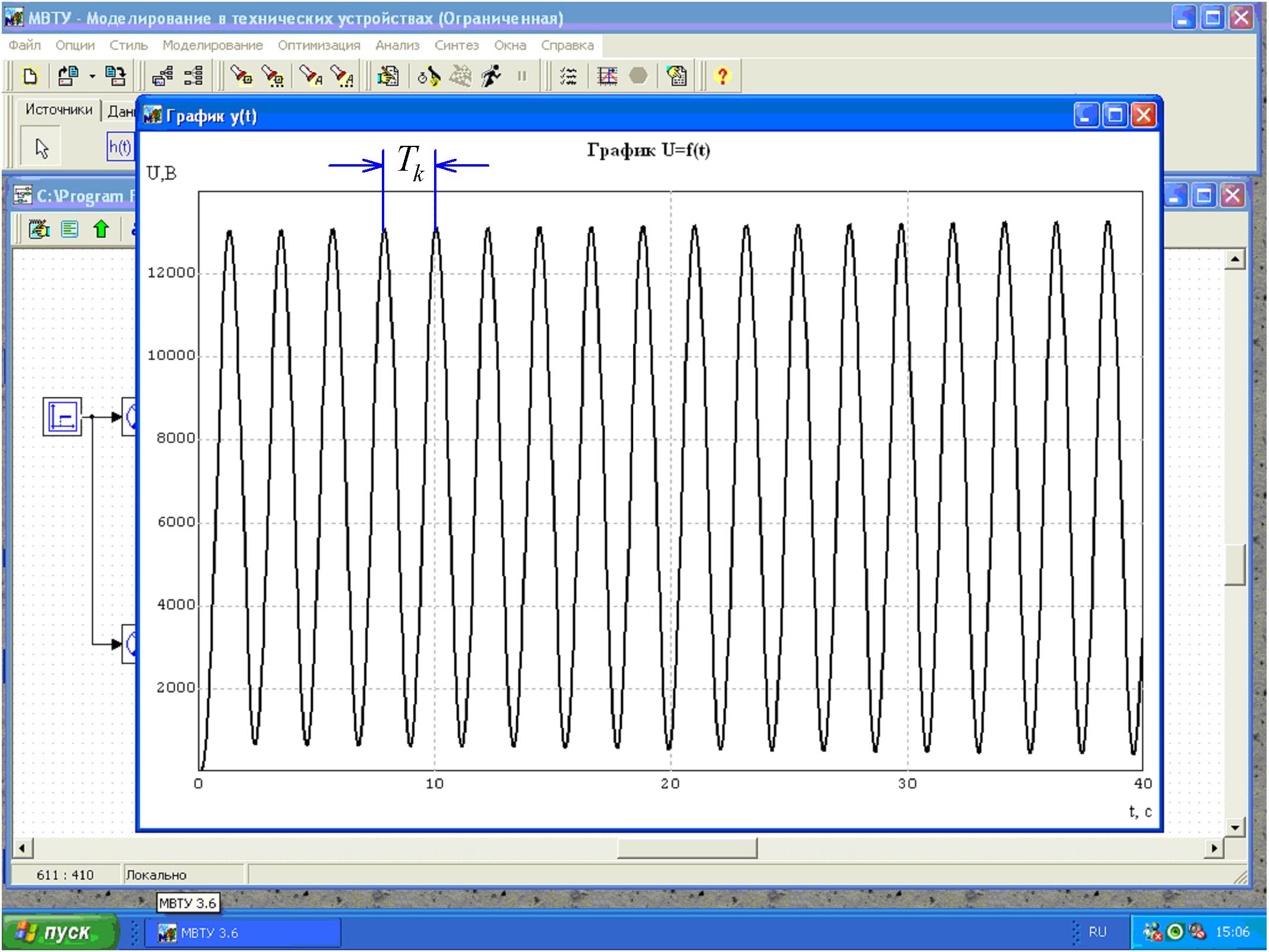
Рис.11. Графики переходных процессов САР:
а – неустойчивый при k1 = 30;
б – на границе устойчивости k1 = k1кр = 29
а
б
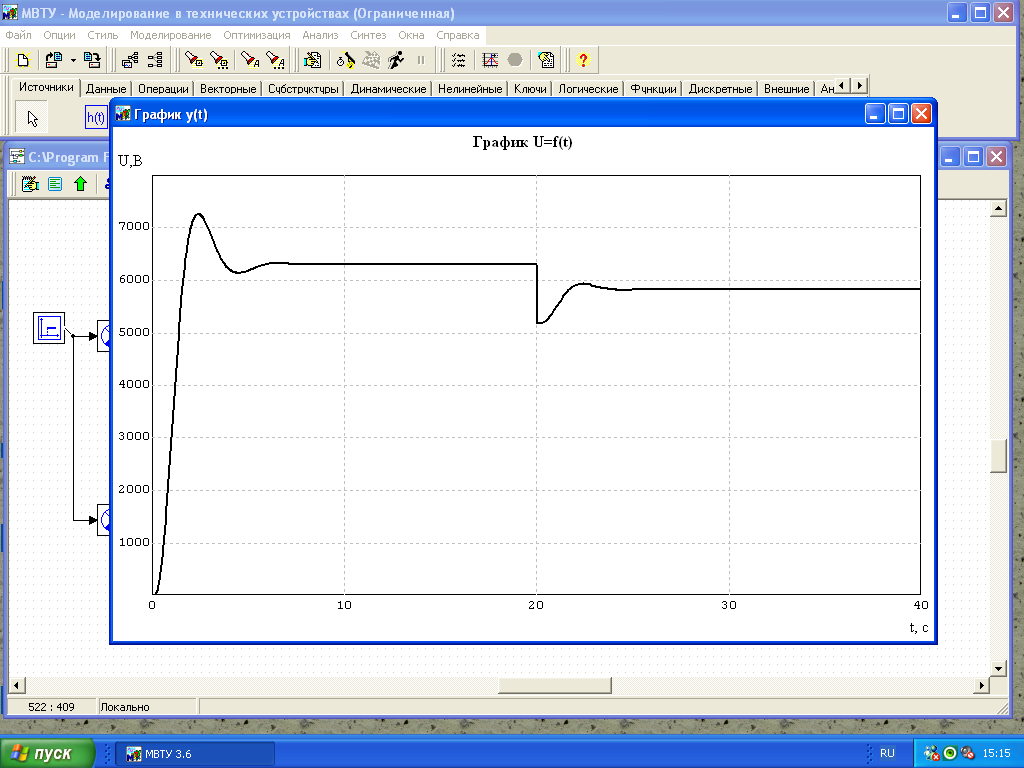
Рис. 12 Графики переходных процессов САР:
а – при k1=0,8 k1 кр; б – при k1=5
Таким образом, для достижения заданных показателей качества процесса регулирования необходима коррекция исходной САР, которую выполним с помощью типового ПИД-закона регулирования.
2.2 . Расчет параметров типового закона регулирования
Структурная схема принятого для коррекции САР типового ПИД-закона регулирования показана на рис. 13, параметры kп, kд и kи которого являются варьируемыми (настраиваемыми). Изменяя их, можно добиться желаемого (заданного) процесса регулирования. Рациональные значения данных параметров определим с помощью эмпирического метода Циглера-Никольса /5, 7/.
Рис. 13. Структурная схема ПИД-закона регулирования: kп = k1
Для расчета параметров ПИД-закона регулирования необходимы числовые значения критического коэффициента П-закона регулирования исходной САР (рис. 9) kп кр = k1 кр и период незатухающих гармонических колебаний Ткр, который определяется непосредственно по графику, показанному на рис.11б. Значения этих параметров согласно результатов моделирования исходного варианта САР, следующие: kп кр = k1 кр= 29; Ткр = 2,2 с.
Для расчета параметров kп, kд и kи воспользуемся формулами Циглера-Никольса /5, 7/ применительно к ПИД-закону регулирования:
kп = 0,6 kкр
kд = 0,75 kп кр Ткр;
kи = 1,2 kп кр/ Ткр.
Используя последние формулы с учетом kп кр = 29 и Ткр = 2,2 с, получим:
kп = 0,6 . 29 = 17,4;
kд = 0,075 . 29 = 4,8;
kи = 1,2 kп кр/ Ткр = (1,2 . 29)/ 2,2 = 15,8.
2 .3. Компьютерное моделирование скорректированной САР
Структурная схема скорректированной САР, составленная на основе схем, показанных на рис. 9 и рис. 13 имеет вид, приведенный на рис. 14.
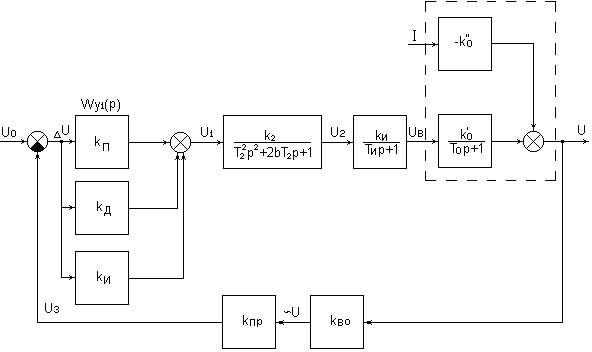
Рис. 14. Структурная схема САР с ПИД-законом регулирования
Схемное окно ПК «МВТУ» с введенной структурной схемой моделирования скорректированной САР (рис. 14) показано на рис. 15. Блок 3, 12, 13, 14, и 15 реализуют ПИД-закон регулирования. Их параметры, определены с помощью метода Циглера-Никольса, приведены в таблице Параметры остальных блоков структурной схемы (рис. 15) даны в таблице
Таблица 2
Значения параметров дополнительных блоков структурной схемы (рис. 15)
|
Блок
|
Параметр
|
Значение
|
|
3
|
Коэффициент усиления
|
17,4
|
|
12
|
Коэффициент усиления
|
4,8
|
|
13
|
Коэффициент усиления
|
0
|
|
|
Вектор начальных условий
|
|
|
15
|
Весовые множители для каждого входа
|
111
|
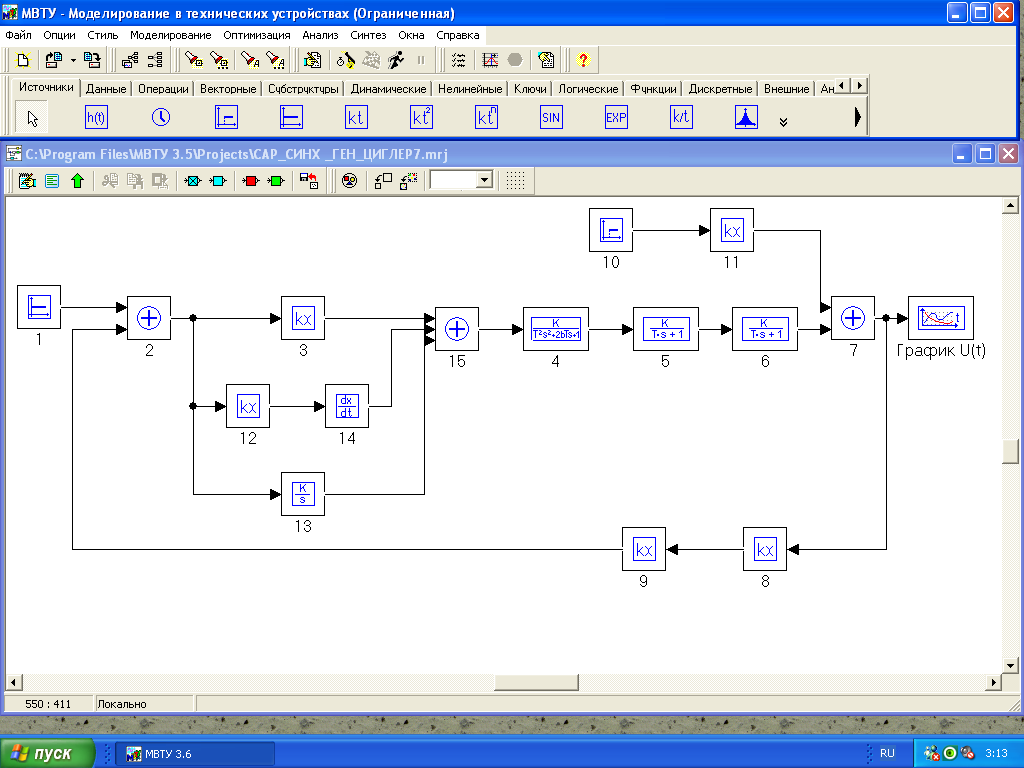
Рис. 15. Схемное окно с введенной структурной схемой САР
ПИД-законом регулирования
На рис. 16 показано графическое окно ПК «МВТУ» с переходным процессом скорректированной САР, а на рисунке 17 приведен обработанный график этого переходного процесса
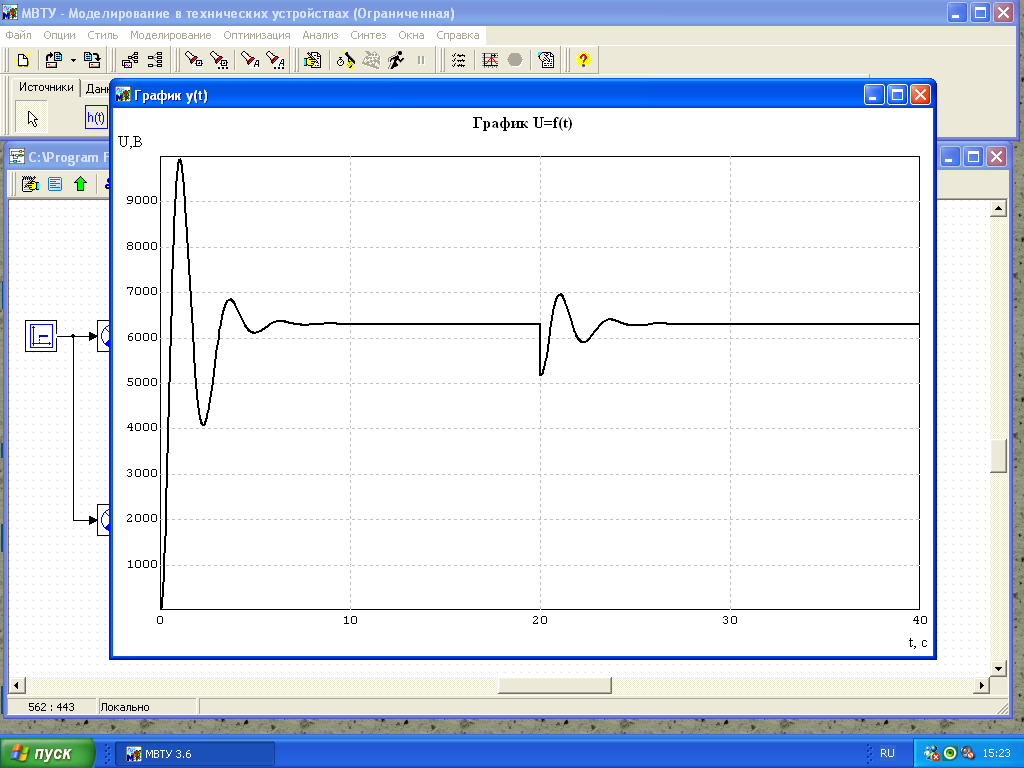
Рис. 16. Графическое окно с графиком переходного процесса САР
с ПИД-законом регулирования (kп=17,4, kд=4,8, kи=15,8)
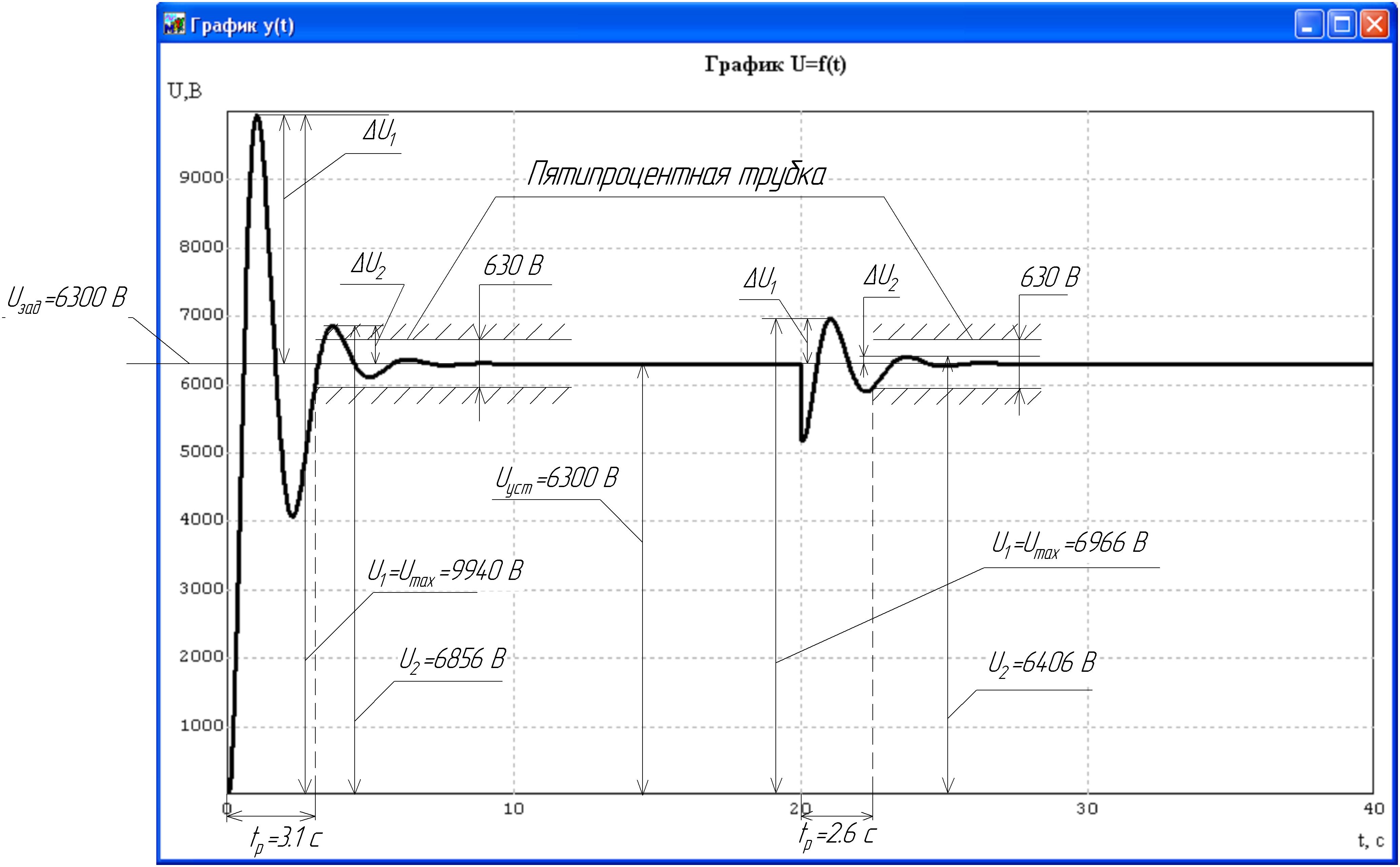
Рис. 17. Обработанный график переходного процесса САР
при kп=17,4, kд=4,8, kи=15,8
Показатели качества САР, полученные на основе обработки графика (рис. 17) следующие.
По заданному воздействию:
- статическая ошибка Uст = 0;
- время регулирования tp = 3,1 c;
- перерегулирование ;
- количество перерегулирований n = 2;
- степень затухания ,
где U1 = U1 – Uуст = 9940 – 6300 = 3640 В;
U2 = U2 – Uуст = 6856 – 6300 = 556 В.
По возмущающему воздействию:
- статическая ошибка Uст = 0;
- время регулирования tp = 2,6 c;
- перерегулирование ;
- количество перерегулирований n = 1;
- степень затухания ,
где U1 = U1 – Uуст = 6966 – 6300 = 666 В;
U2 = U2 – Uуст = 6406 – 6300 = 106 В.
.
Из анализа полученных показателей качества САР следует, что процесс регулирования при отработке задающего воздействия не удовлетворителен по перерегулированию, так % равное 49% превышает заданное его значение ( зад % 20%). Что касается качества процесса регулирования при отработке возмущения, то он удовлетворяет требуемым показателям качества
( % = 8,8% < 20%).
Известно, что метод Циглера-Никольса, с помощью которого были рассчитаны параметры ПИД-закона регулирования, не гарантируют оптимальных показателей качества процесса регулирования. Улучшенные или оптимальные показатели качества САР можно достичь либо подбором варьируемых параметров (kп, kд, kи), либо их оптимизацией (в ПК «МВТУ» есть модуль обеспечивающий параметрическую оптимизацию САР).
На рис. 18 показан результат моделирования САР при kп=6, kд=2 и kи=7, которые были определены подбором.
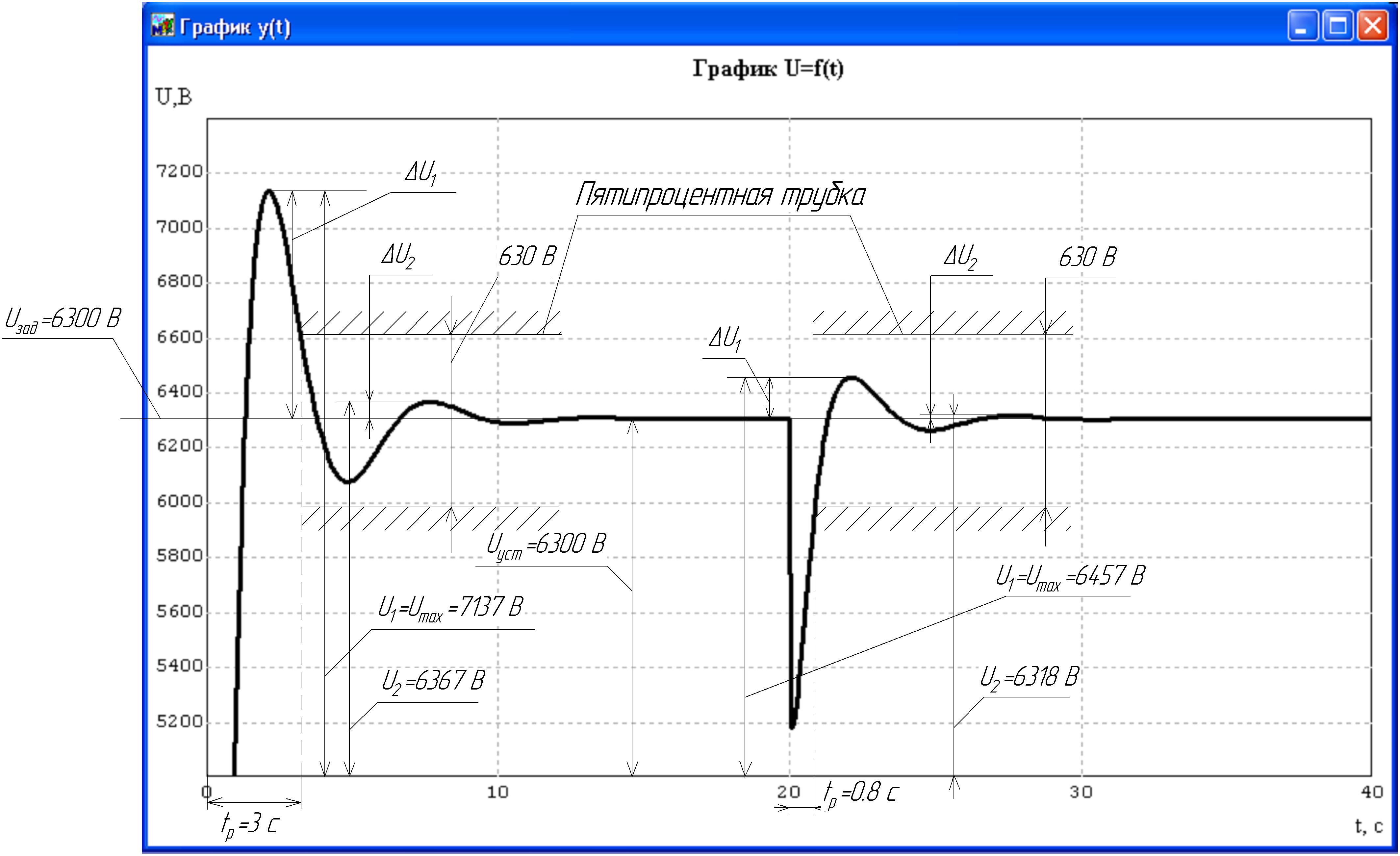
Рис. 18. Обработанный график переходного процесса САР
при kп=6, kд=2, kи=7 (в увеличенном масштабе)
Показатели качества САР, полученные на основе обработки графика (рис. 18) следующие.
По заданному воздействию:
- статическая ошибка Uст = 0;
- время регулирования tp = 3 c;
- перерегулирование ;
- количество перерегулирований n = 1;
- степень затухания ,
где U1 = U1 – Uуст = 7137 – 6300 = 837 В;
U2 = U2 – Uуст = 6367 – 6300 = 67 В.
.
По возмущающему воздействию:
- статическая ошибка Uст = 0;
- время регулирования tp = 0,8 c;
- перерегулирование ;
- количество перерегулирований n = 0;
- степень затухания ,
где U1 = U1 – Uуст = 6457 – 6300 = 157 В;
U2 = U2 – Uуст = 6318 – 6300 = 18 В;
.
Из анализа полученных показателей качества следует, что процесс регулирования САР с ПИД-законом регулирования удовлетворяет заданным показателям качества.
3. Выводы по работе
В курсовой работе решены следующие вопросы и получены следующие результаты:
- составлена функциональная схема САР;
- определены передаточные функции объекта регулирования и элементов системы;
- составлена структурная схема исходной САР, на основе которой выполнено ее компьютерное моделирование;
- результаты моделирования САР показали, что П-закон регулирования не обеспечивает удовлетворительных показателей качества процесса регулирования;
- в ходе моделирования исходного варианта САР определены параметры процесса регулирования на границе устойчивости системы: kкр – критический коэффициент П-закона регулирования и Ткр – период гармонических колебаний (kкр = 29, Ткр = 2,2 с);
- в соответствии с заданием для коррекции САР принят ПИД-закон регулирования, параметры которого (kп, kд, kи) рассчитаны с помощью инженерного метода Циглера-Никольса (kп = 17,4, kд = 4,8,
kи = 15,8);
- результаты моделирования скорректированной САР (на основе ПИД-закона регулирования с помощью метода Циглера-Никольса) показали, что она обеспечивает хорошие показатели качества процесса регулирования по задающему воздействию, но не удовлетворяет требованиям к качеству по возмущению;
- посредством подбора параметров ПИД-закона регулирования определены их значения (kп = 6, kд = 2, kи = 7), при которых САР обеспечивает требуемые показатели качества процесса регулирования как по задающему, так и возмущающему воздействию.
ЛИТЕРАТУРА
- Бородин, И.Ф. Автоматизация технологических процессов [текст]/
И.Ф. Бородин, Ю.А. Судник. – М.: КолосС, 2007. – 343 с.
- Шавров, А.В. Автоматика [текст]/ А.В. Шавров, А.П. Коломиец. – М.: КолосС, 2010. – 262 с.
- Карташов, Б.А. Практикум по автоматике. Примеры и задачи по системам автоматического регулирования (в двух частях). Часть первая. Примеры решения задач по системам автоматического регулирования [текст]/
Б.А. Карташов, А.Б. Карташов, Т.В. Жидченко. – Зерноград: ФГОУ ВПО АЧГАА, 2007. – 155 с.
- Карташов, Б.А. Практикум по автоматике. Примеры и задачи по системам автоматического регулирования (в двух частях). Часть вторая. Задания для разработки схем, расчетов и исследований систем автоматического регулирования [текст]/ Б.А. Карташов, А.Б. Карташов, Т.В. Жидченко. – Зерноград: ФГОУ ВПО АЧГАА, 2007. – 175 с.
- Карташов, Б.А. Анализ и синтез систем автоматического регулирования с микроЭВМ [текст]/ Б.А. Карташов, Е.А. Шабаев. – Зерноград: ФГОУ ВПО АЧГАА, 2009. – 170 с.
- Практикум по автоматике. Математическое моделирование систем автоматического регулирования [текст]/ под. ред.Б.А. Карташова // Б.А. Карташов, А.Б. Карташов, О.С. Козлов, Г.С. Пархоменко, С.Г. Пархоменко. – М.: КолосС, 2004, 2006. – 184 с.
- Практикум по математическому моделированию систем автоматического регулирования [текст]/ под. ред.Б.А. Карташова // Б.А. Карташов,
А.Б. Карташов, О.С. Козлов, Г.С. Пархоменко, С.Г. Пархоменко. – М.: КолосС, 2009. – 299 с.
ОР
Uв
U
I
ИО
U2
Uв
О2
U1
U2
УО1
U
U1
ПО
U3
U
ВО
U
U
kп
kдp
kи/p
U1
U
-
Проектирование системы автоматического регулирования