Оптимизационные методы компенсации реактивной мощности системы электроснабжения железной дороги
Министерство высшего и средне – специального образования Республики Узбекистан
Государственное акционерная железнодорожная компания
«Узбекистон темир йуллари»
Ташкентский институт инженеров транспорта
Ташев Бахадир Каюмович
«Оптимизационные методы компенсации реактивной мощности системы электроснабжения железной дороги»
Магистерская диссертация по специальности
5А520205 – электроснабжение (в предприятиях железной дороги).
Научний руководитель
к.т.н. доц. Якубов М.С.
Ташкент 2012
ОГЛАВЛЕНИЕ
|
Введение ………………………………………………………………………
|
3
|
|
Глава 1.Способов и технических средств компенсации реактивной мощности системы электроснабжения и качества электроэнергии…..
|
10
|
|
1.1. Обзор способов повышения коэффициента мощности и качества электроэнергии …………………………….......................................................
|
10
|
|
1.2. Поперечная компенсация и коэффициент мощности…………………...
|
14
|
|
1.3. Повышение коэффициента мощности и стабилизация напряжения контактной сети с помощью продольной компенсации…………………….
|
22
|
|
1.4. Выбор оптимальных параметров установки продольно-поперечной компенсации…………………………………………………………………….
|
29
|
|
Выводы по первой главе……………………………………………………….
|
48
|
|
Глава 2. Математические модели оптимизационных задач электроснабжения…………………………………………………………….
|
49
|
|
2.1. Методы решения оптимизационных задач………………………………
|
49
|
|
2.2. Анализ решения оптимизационных задач……………………………….
|
52
|
|
2.3. Линейные оптимизационные задачи повышения коэффициента мощности………………………………………………………………………..
|
54
|
|
2.4. Трансформаторные задачи повышения качества электроэнергии и коэффициента мощности………………………………………………………
|
56
|
|
2.5. Вопросы применения статических тиристорных компенсаторов
реактивной мощности на электроподвижном составе……………………….
|
60
|
|
Выводы по второй главе …..………………………………………...................
|
63
|
|
Глава 3. Нелинейная оптимизационная задача компенсации реактивной мощности………………………………………………………...
|
64
|
|
3.1. Методы оптимизации нелинейных задач электроснабжения…………...
|
64
|
|
3.2. Применение метода неопределенных множителей Лагранжа для выбора оптимальных параметров устройства компенсации реактивной мощности………………………………………………………………………..
|
67
|
|
3.3. Задача оптимально передачи и распределения активной мощности в системе электроснабжение…………………………………………………….
|
69
|
|
Выводы по третьей главе ……………………………………….......................
|
71
|
|
Глава 4.Принцип работы тиристорного компенсатора………………...
|
73
|
|
4.1. Искусственный сдвиг с опережением получается в схемах с полупроводниковыми управляемыми вентилям - тиристорами…………….
|
73
|
|
4.2. Расчетные соотношения и характеристики плавно регулируемых вентильных компенсаторов реактивной мощности ………………………..
|
75
|
|
Выводы по четвертой главе……………………………………………………
|
91
|
|
Заключение ………………………………………………….........................
|
92
|
|
Список использованной литературы…………………….............................
|
94
|
|
Приложения ……………………………………………………......................
|
99
|
Введение
Системы электроснабжения электрифицированных железных дорог по предъявляемым к ним требованиям, условиям работы, используемому оборудованию и устройствам и, наконец по задачам, решаемым ими, коренным образом отличаются от системы электроснабжения промышленных предприятий.
За годы независимости Республики Узбекистан дальнейшее развитие получил железнодорожной транспорт, что обусловило совершенствование как технический базы системы электроснабжения, так и методов их расчета [1,2]. Совершенствовалась теория расчета, выбора наивыгоднейших параметров, определения различных показателей работы система электроснабжения электрифицируемых железных дорог. Систематизируются применяемые при электрификации железных дорог технические решения с возможными по условиям и уровню существующих представлений и критическим их освещением, уточняются методы установления количественных зависимостей между показателями работы и параметрами устройств электроснабжения. [3].
Электрические железные дороги получают электрическую энергию от энергосистем, объединяющих в себе несколько электростанций. Электрическая энергия, передаваемая через электрические подстанции различного напряжения и тяговые подстанций, преобразуется к виду используемому в локомотивах, и по тяговой контактной сети передается к ним.
Основной задачей системы электроснабжения является обеспечение надежной бесперебойной работы железной дороги. Для этого необходимо чтобы мощности всех элементов система электроснабжения были достаточной для обеспечения потребной мощности каждому электровозу с обеспечением номинальных показателей качества электроэнергии. [6].
Известно что, недопустимое для данной электрической установки увеличение нагрузки может привести к выходу его из строя. А увеличение номинальной мощности приводит к выходу и увеличению затрат. Поэтому необходимо уметь выбирать параметры всех устройств системы электроснабжения так, чтобы они бесперебойно работали в течении времени, определяемого их нормальным сроком службы и вместе с тем требовали минимальных затрат. Следовательно эти задачи должны быть решены как задачи оптимизации систем электроснабжения с применением различных математических методов, позволяющих осуществит выбор наиболее экономически целесообразного вариантов.
Основными вопросами электроснабжения, требующими математического анализа, являются [3,4]:
- рациональный выбор всех элементов системы электроснабжения: числа, местоположения и мощности трансформаторов, сечений проводов, шин, кабелей, и электрической аппаратуры;
- оптимальный выбор параметров устройств компенсации реактивной мощности при минимальных потерях в контактной сети, трансформаторах и пуско – регулирующей аппаратуре;
- выбор рационального напряжения системы внешнего и внутреннего электроснабжения;
- определение основных показателей электрической тяги;
- нахождение рационального места расположения тяговых подстанций, пунктов, длины секций и т.п.
- выбор схемы питания, резервов и аппаратуры управления с учетом надежности электроснабжения;
- обеспечение качества напряжения.
Для решения вышеуказанных задач проектирования и эксплуатации систем электроснабжения железной дороги используются различные математические методы, что и обуславливает широкое применение цифровых ЭВМ. Целесообразность применения ЭВМ для таких расчетов объясняется не только сложностью и громоздкостью вычислений при использовании различных методов, но и большим количеством сравнительно простых однотипных расчетов, необходимых для представления оптимальных режимов электропотребления. [5].
Использование ЦВМ позволило проводить сложные вычисления с учетом достаточного количества факторов, характеризующих рассматриваемую задачу. [12].
Развития рыночных отношений предусматривает применение оптимизационных методов при решений задач электроснабжения. Теория оптимизации была разработана в течение трех последних десятилетий в трудах математиков и инженеров для нужд радиоэлектроники, связи, автоматического управления, вычислительной и военной техники. [4,6,7,9,10,11,13]. Математический аппарат теории оптимизации основан на таких разделах современной математики, как функциональный анализ, дифференциальные уравнения, теория случайных процессов, теория графов, теория оптимизации, теория экспертных оценок, а также теория вероятностей и математическая статистика. [14,15].
Теория оптимизации служит научной основой деятельности лабораторий, отделов, бюро и групп на предприятиях, в проектных, научно-исследовательских и эксплуатирующих организациях.
С проблемой оптимизации в электроэнергетике связаны следующие практические задачи: оценка и анализ режимов действующего оборудования и установок, прогнозирование оптимальных режимов действующего оборудования и установок, нормирование уровня надежности, оптимизация технических решений по обеспечению надежности при проектировании, создании и эксплуатации электроэнергетического оборудования, установок и систем.
Решение этих задач основано на математических моделях и методах теории оптимизации с учетом надежности. Однако и сама теория оптимизации и технико – экономических затрат в приложении к задачам электроэнергетики продолжает развиваться. [13]. Одни и те же практические задачи получают решение на основе моделей и методов, все более совершенных в отношении достоверности и точности результатов, полноты учета специфических обстоятельств и трудоемкости расчета. К этим новым задача должны быть привлечены новые исследователи из числа магистрантов как будущих молодых специалистов. В настоящей магистратской диссертации изложены основные методы общей теории надежности в применении к решению конкретных задач надежности электро установок. Кроме того, в данной работе рассматриваются задачи анализа надежности как отдельных электроустановок например силового трансформатора, высоковольтного выключателя, но и в целом тяговых подстанции при эксплуатаций с целью оптимизации периодичности их технического обслуживания.
Изданная в последние годы научная и научно-производственная литература по проблеме компенсации реактивной мощности, определения оптимальных параметров претерпела ряд изменений, был произведен анализ многолетнего опыта появившихся методов, в связи с повышением роли математических моделей применением теории вероятности, экономико-математической модели.
В настоящей диссертации соответствии с заданием и приведены примеры оценки уровня компенсации реактивной мощности с учетом механизации потерь активной мощности и расходов на содержание установок.
Основным методом решения оптимизационных задач, решаемых нелинейными дифференциальными уравнениями является численный метод Рунге - Кутта, Зайделя или модифицированный метод Кутта-Мерсон. [4]. Это объясняется прежде всего тем, что ряд проблем исследования не поддается аналитическому решению. Общая погрешность решения задачи складывается из неустранимой погрешности исходной информации, погрешности метода, например аппроксимируемой функции, вычислительной погрешности и т.д.
При проектировании систем электроснабжения электрифицируемой железной дороги производится выбор наиболее целесообразного варианта использования на основе всестороннего анализа технических и экономических показателей.
К основным техническим показателям относятся: надежность, удобство эксплуатации, долговечность сооружения, объем текущих и капитальных ремонтов, степень автоматизации.
Основными экономическими показателями являются: первоначальные (капитальные) вложения и ежегодные (текущие) эксплуатационные расходы. Только сопоставление и анализ всех технико – экономических показателей, характеризующих варианты, позволяют произвести выбор наилучшего решения. Экономичность варианта должна оцениваться с учетом как первоначальных капитальных вложений, так и текущих затрат. Поэтому при экономических расчетах в соответствии с существующей методикой рекомендуется в качестве основного метода оценки использовать экономичности вложения с будущими издержками производства (эксплуатационными расходами).
Основным показателем сравнительной экономической эффективности капитальных вложений, используемых в качестве критерия оптимальности при обосновании решений по проектированию систем электроснабжения, является минимум приведенных затрат.
Особое место в задачах оптимизации имеет место расчет параметров устройства компенсации реактивной мощности (УКРМ), так оно является самым эффективным средством уличения энергетических показателей электрической тяги. Техническим результатом компенсации реактивная мощности потребляемой электровозом является:
- уменьшение потерь энергии, возникающих при прохождении реактивных токов и токов обратной последовательности;
- увеличение пропускной способности контактной сети;
- повышение и стабилизация уровня напряжения на шинах подстанции и вследствие этого улучшение качества напряжения у районных потребителей, увеличение скорости движения поездов и ускорение доставки грузов.
Опыт применения УКРМ показывает, что вышеуказанные составляющие покрывают не только дополнительные капитальные затраты, но и расходы, связанные с наличием незначительных активных потерь в УКРМ.
Например, повышение на 15% приводит к снижению потерь в питающей сети на 41%. Поэтому учет сочетания потерь от применения УКРМ является важной задачей повышения энергетических показателей современной системы электроснабжения.
Актуальность темы. Обеспечение бесперебойного и беспрерывного электроснабжения электрифицированной железной дороги в период дефицита энергетических ресурсов, а также оперативного управление оптимальными режимами работы систем является в настоящее время основной задачей электроснабжения. Так как применение оптимальных параметров устройства компенсации реактивной мощности, является самым эффективным средством увеличения энергетических показателей электрической тяги, приводящим к уменьшению потерь энергии, и увеличению пропускной способности контактной сети.
Изложенные выше обстоятельства обуславливает необходимость оптимального поддерживания режима электроустановок тяговых подстанции с учетом недоотпуска электроэнергии потребителем, материальных, трудовых и финансовых затрат. Таким образом научно-исследовательская работа по исследованию различных оптимизационных методов расчета параметров, мест установки УКРМ тяговых подстанциях является актуальной.
Цель работы: разработка комплекса установок, методов компенсации реактивной мощности силовых электроустановок, применение оптимальных методов расчета параметров установки компенсации также учитывающих особенности эксплуатации.
Для достижения поставленной цели в работе решены слудующие задачи:
- сделан сравнительный анализ методов оптимизаций параметров устройства компенсации реактивной мощности с учетом режима эксплуатации.
- выбран метод неопределенных множителей Лагранжа для нелинейной оптимизации параметров УКРМ.
Научная новизна работы состоит: в обосновании применения неопределенных множителей Лагранжа при расчете параметров УКРМ с учетом тепа электроустановок, режима нелинейной оптимизации. Решена также задача оценки технико – экономических показателей различных схем компенсации, в том числе с применением тиристорных регулируемых компенсаторов.
Практическая значимость. Данные магистерской диссертации можно использовать при опрелении места установки и параметров УКРМ на железной дороге и вообще в системе электроснабжения потребителей как в отдельно электрических сетях Республики Узбекистан. В последнее время характеризуется значительным улучшением энергетических устройств и надежности технико - экономических показателей тягового электрооборудования. В том же время сокращение затрат на производство и ввод в действие энергоустановок приобретённый в работе с ними, позволят рассчитать технико экономических показателей.
Глава 1.
Способов и технических средств компенсации реактивной мощности системы электроснабжения и качества электроэнергии
1.1. Обзор способов повышения коэффициента мощности и качества электроэнергии
Основными критериями качества электрической энергии в тяговых сетях яв�ляются: отклонение и колебание напряжения, несимметрия и несинусоидальность. В соответствии с этим и применяемые способы направ�лены на повышение показателей качества электрической энергии. К ним относятся регулирование напряжения на трансформаторах, про�дольная (последовательная) емкостная и поперечная (парал�лельная) емкостная компенсация.
Вследствие отклонений напряжения в системе и потерь напряжения на самой подстанции напряжение на ее шинах не остается постоянным. Чтобы обеспечить достаточно высокое и стабильное напряжение, при�нимают специальные меры. К ним относится регулирование напряже�ния с помощью регулируемых трансформаторов (путем изменения коэффициента трансформации). Большие изменения напряжения не по�зволяют держать его среднее значение достаточно высоким. Увели�чение напряжения сверх номинального без превышения пределов, до�пускаемых по условиям работы локомотивов, по существу, привело бы к соответствующему повышению их мощности. Но если при этом возможные колебания напряжения сохра�нят свои значения, то максимальные напряжения выйдут за допустимые пределы. Поэтому пойти на это повышение напряжения мож�но только при одновременном обеспечении стабильности напряжения [19].
Регулирование напряжения с помощью трансформаторов. Об�мотки трансформаторов выполняют с ответвлениями, присоединение к которым осуществляется специальным переключателем без разрыва цепи тока. На тяговых подстанциях понижающие трансформаторы при�соединены к первичной сети в точках с различными значениями подво�димого напряжения. У таких трансформаторов ответвления выполняют, как правило, на обмотках высшего напряжения. Это позволяет, изменяя число витков первичной обмотки в соответствии с изменением напряжения питающей сети, поддерживать более или менее постоян�ное напряжение на вторичной стороне [17]. Регулирование напряжения на первичной стороне используют и для того, чтобы подводимое к первич�ной обмотке напряжение не превосходило допустимых для каждого ответвления значений. В противном случае возрастают намагничи�вающий ток и реактивная мощность, увеличивается также искажение кривой напряжения.
Количество переключений контактного переключателя, осуществ�ляющего изменение коэффициента трансформации, ограничивается некоторым числом. Поэтому, чтобы избежать переключений от случай�ных кратковременных изменений напряжения, в системе автоматики предусматривается элемент, обеспечивающий выдержку времени [17].
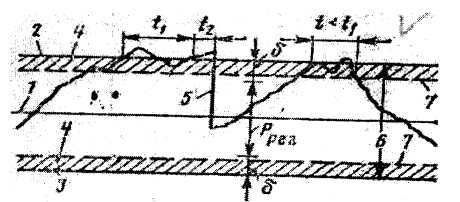
На рис. (1.1) схематически показан порядок работы схемы автомати�ческого регулирования напряжения под нагрузкой. Если в процессе своего изменения напряжение превзошло некоторый уровень 2 и в те�чение времени t1 остается выше уровня 7, переключатель приходит в действие и через «собственное» время работы t2 производит переключе�ние. Если время t < t1 (см. рис. 1.1 справа), переключения не происхо�дит. Во избежание возникновения явления «качания» зона нечувст�вительности реле берется шире ступени регулирования на 2 . Регули�ровать автоматику переключения стремятся так, чтобы получить не�обходимый эффект от регулирования при минимальном числе сраба�тываний переключателя. Это достигается рациональным выбором сред�него значения регулируемого напряжения, зоны нечувствительности и выдержки времени [34].
На промышленных и районных подстанциях применяют выдержки времени порядка 40-60 с. Зону нечувствительности обычно прини�мают не менее 120-140% напряжения ступени. Если значение ступе�ни 2,5 %, то зона нечувствительности получается равной 3,0=3,5%. При этом точность регулирования будет ± (1,5 4 1,75) %.
Как показывает практика, уменьшение зоны нечувствительности вызывает непропорционально большое увеличение числа переключе�ний. Это говорит о том, что следует осторожно подходить к ее умень�шению. Естественно, и чрезмерное увеличение зоны, во-первых, не да�ет пропорционального уменьшения числа переключений, а во-вторых, может вообще свести на нет эффект от применения регулирования. Число ступеней регулирования для повышения и понижения напряжения и напряжение каждой ступени в процентах могут быть различ�ными. На тяговых подстанциях, где обычно наблюдается более силь�ное понижение напряжения, при�меняют и несимметричные пределы регулирования с большим числом ступеней, повышающих напря�жение.
Рис. 1.1.
Кривая, характеризующая изменение напряжения при ступенча�том регулировании его под нагруз�кой: t-номинальное напряжение реле; 2,3-соответственно верхний и нижний уровни срабатывания реле; 4-зона удержива�ния реле; 5-зона переключения на низшую ступень регулирования; 6-зона не�чувствительности реле; 7-уровни напря�жения отпускания реле; t1-выдержка времени; t2-время работы приводного механизма переключателя;
Ррег - ступень регулирования; -погрешность реле
Рациональный выбор числа ступеней, уровня напряжения при регулировании и, как следствие, ко�личества переключений является технико-экономической задачей. Для ее решения необходимо рас�полагать методом, позволяющим определять среднее значение на�пряжения и соответствующее чис�ло переключений для различных условий движения (число поездов, их вес и т. п.). Пока можно лишь ориентироваться на статистические данные, полученные для опреде�ленных конкретных условий.
Согласно проведенным исследованиям К.Г. Маркварда [19] при ступени 2,5% и изменении выдер�жки времени о 1 до 2 мин число пе�реключений на различных подстан�циях уменьшалось с 50-100 до 7-14 на одной дороге и с 220-230 до 24-32 на другой. Первая дорога характеризуется большими размерами грузового движения и рав�нинным профилем, а вторая – при�городным движением и резким из�менением нагрузки.

Для примера на рис. 1.3 пока�зана зависимость числа переклю�чений от выдержки времени. Кри�вая получена в результате обра�ботки графиков изменения напря�жения на тяговых подстанциях ря�да дорог.
Рис. 1.2.
Зависимость числа пере�ключений N устройства регулиро�вания напряжения под
нагрузкой от выдержки времени t
При параллельной работе нес�кольких трансформаторов на одной подстанции во избежание появления большого уравнительного тока приходится применять схемы» обес�печивающие одновременное переклю�чение регуляторов всех трансформа�торов. Даже при разности напряже�ний в одну ступень регулирования, т.е. в 2,5%, при ин = 67% полу�чается уравнительный ток порядка 20% номинального, а при разности напряжений в 5% он возрастает до 40% номинального [5].
Устройство регулирования напря�жения под нагрузкой заметно уве�личивает стоимость трансформатора [6].
Так, для трансформаторов с переключающей аппаратурой в обмот�ках 110 кВ коэффициент удорожания (по сравнению со стоимостью такого же трансформатора без регулирования) лежит в пределах 1,10-1,75 [7].
1.2. Поперечная компенсация и коэффициент мощности
Реактивная мощность в установках переменного тока загружает обмотки машин, трансформаторов и провода контактной сети. В результате уве�личиваются потери энергии и, уменьшается рас�полагаемая мощность соответствующих устройств. Кроме того, реак�тивный ток, протекая по элементам системы энергоснабжения, облада�ющим реактивным сопротивлением, вызывает дополнительную поте�рю напряжения на зажимах потребителя.
Коэффициент мощности в определяемый момент времени
(1.1)
где Pt и Qt - соответственно активная и реактивная мощность в момент времени t.
Если перейти к средним значениям Р(t) и Q (t) за некоторый про�межуток времени Т, то Р = WP/T и Q = WQ/T, здесь WP и WQ - рас�ходы соответственно активной и реактивной энергии (условное поня�тие) за определенный период времени Т.
Так как WP и WQ оцениваются по показаниям счетчиков активной и реактивной энергии и, следовательно, оценка коэффициента мощно�сти в этом случае ведется по среднему его значению за период Т, то
(1.2)
Такой метод оценки обладает существенными недостатками [19].
В среднем за некоторый период Т коэффициент мощности может быть достаточно высоким и укладываться в требуемые нормы. Однако при больших нагрузках в системе коэффициент мощности может силь�но уменьшаться, т. е. будет расти реактивная мощность. При выпря�мительных электровозах кривая тока имеет несинусоидальную фор�му. Коэффициент мощности в этом случае определяется произведени�ем (здесь v1-коэффициент искажения кривой тока; 1-угол сдвига фаз между первыми гармониками тока и напряже�ния) [16].
Коэффициент мощности электровоза в общем случаезависит от тока нагрузки (вы�прямительного тока ld) и от соотношения индуктивностей в цепи по�стоянного и переменного тока. Он зависит также от значения напряже�ния на шинах бесконечной мощности (т. е. в той точке сети, в которой содержание гармоник незначительно).
Для одного и того же электровоза при его перемещении вдоль фи�дерной зоны изменяется индуктивное сопротивление системы и, следо�вательно, изменяется коэффициент мощности [18]. На рис. 1.6 показано, как изменяется коэффициент мощности электровоза в зависимости от удаления его от подстанции. Появление на фидерной зоне других поездов поведет как бы к увеличению эквивалентной индуктивности, подключенной к электровозу. Аналогичное влияние окажет и пониже�ние напряжения на шинах бесконечной мощности. Коэффициент мощ�ности на вводах тяговой подстанции дается в зависимости от двух показателей l_/lк и q (рис. 1.3), причем
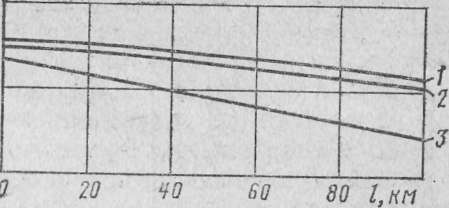
Рис. 1.3.
Изменение коэффициента мощности электровоза в зависимости от расстояния / от подстанции до электровоза:
2- 3-
и
где l- среднее значение тока электровоза;
lк - амплитудное значение тока короткого замыкания;
U0 - напряжение (действующее значение) на первичной обмотке трансформатора тяговой подстанции, приведенное к числу витков тяговой обмотки;
X - суммарное индуктивное сопротивление цепи переменного тока;
q - отношение индуктивностей цепей.
Практически коэффициент мощности на вводах тяговых подстан�ций переменного тока колеблется в пределах от 0,75 до 0,85. Для по�вышения коэффициента мощности электрической тяги переменного тока могут быть применены те же средства, которые используются в системах для других потребителей. Это – синхронные компенсаторы, конденсаторные батареи, включа�емые в сеть параллельно потреби�телям, так называемая попереч�ная (параллельная) компенсация (ППК), питающиеся от системы крупных синхронных двигателей (если по условиям работы их мож�но использовать в режиме перевоз�буждения). На тяговых подстан�циях переменного тока используют, в основном, конденсаторные батареи.
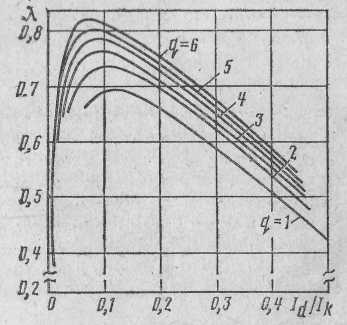
Рис. 1.4.
Зависимости коэффициента мощности на вводах тяговой под�станции от отношения/- /lк и q кривые 1-6 соответствуют значениям q от 2 до 7)
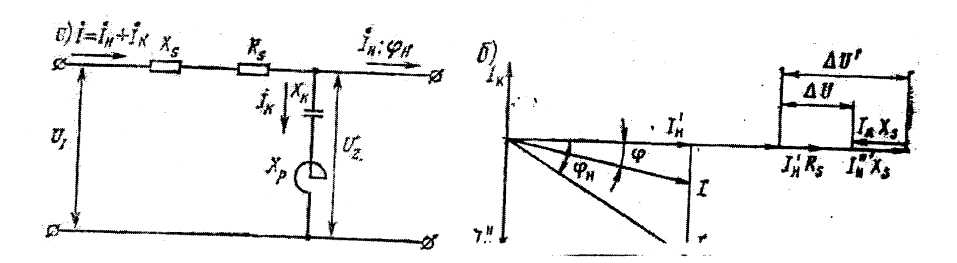
Рис. 1.5.
Схема замещения (а) и векторная диаграмма (б) при поперечной ком�пенсации:
Xs и Rs - индуктивное и активное сопротивление системы (от источника питания до места установки ППК;
Хk - емкостное сопротивление ППК;
U1, и U2-напряжения в начале (у источника питания) и в конце (в месте установки ППК) линии;
-ток потребителя (нагрузки) и сто активная и реактивная составляющие;
1к - ток ППК;
I - суммарный ток потребителя и ППК
Рассмотрим принципиальную схему ППК применительно к прос�тейшей однофазной цепи с индуктивной нагрузкой (рис. 1.8, а). Из векторной диаграммы рис. 1.8, 6 видно, что включение конденсаторной батареи уменьшает угол сдвига между током и напряжением в начале линии, т. е. повышаеют коэффициент мощности. Действительно <н. Одновременно уменьшается потеря напряжений в системе с U' до U:
(1.3)
Из выражения (1.3) и из векторной диаграммы видно, что соответствующим подбором Хк (а следовательно, Ik) можно свести потерю на�пряжения к нулю и даже дать ей отрицательное значение. В последнем случае напряжение у потребителя станет выше напряжения у источни�ка энергии. Включение конденсаторной батареи на шинах тяговых под�станций 27,5 кВ создает условия для возникновения резонанса напря�жений. В данном случае колебательный контур имеет две параллельные ветви: одна ветвь состоит из индуктивных сопротивлений систе�мы и трансформаторов подстанции, другая образуется индуктивными сопротивлениями тяговой сети и электровозов.
При увеличении напряжения скачком, которое происходит в мо�мент окончания коммутации вентилей электровоза, т. е. дважды за один период, в колебательном контуре возникает ток собственных колеба�ний. Этот ток имеет повышенную частоту и может достигать значений, соизмеряемых с основным током. Как известно, резонанс напряжений возникает при
, (1.4)
где L и С — соответственно индуктивность и емкость колебательного контура,
Если заданы параметры L и С, то частота, при которой возникает резонанс, .
Чтобы расстроить резонанс на всех гармониках - 3, 5, 7-й (и т. д.) необходимо для всего этого ряда нарушить условие, резонанса (1.4).
Для этой цели последовательно с конденсаторной батареей включают реактор (см. рис. 1.8). [25]. Подобрав индуктивность реактора так, чтобы его индуктивное сопротивление для 3-й гармоники fа = 150 Гц было равно емкостному сопротивлению батареи, т. е. Хр3 = Хкз, можно быть уверенным, что индуктивное сопротивление всего контура для этой частоты будет превосходить емкостное, т. е. резонанс встанет не�возможным. Для гармоник более высокого порядка индуктивное со�противление будет увеличиваться, а емкостное падать, т. е. резонанс тем более будет невозможен.
При нормальной частоте f1 - 50 Гц сопротивление реактора ХРt=Xp3/3, а сопротивление конденсаторной батареи Хк1=3Хкз, поэто�му общее сопротивление поперечной компенсации Хппк1 будет иметь емкостный характер. При этом (с учетом равенства Хр3=Xк3) со�противление реактора для 1-й гармоники
Xpi = XKl/9. (1.5)
Однако включение реактора ведет к уменьшению общего емкост�ного сопротивления ППК. Для обеспечения ее сопротивления Хппк1, необходимого по условиям компенсации реактивной мощности при f1=50 Гц, сопротивление конденсаторной батареи Хк1 должно быть больше Хппк1 на значение сопротивления реактора Хр1. Таким образом, , откуда имеем:
Хк1 =1,125 Хппк1 (1.6)
Включение последовательно с конденсаторной батареей реактора приведет к увеличению напряжения на конденсаторной батарее. Если пренебречь активным падением напряжения в цепи Хк - Хр (см. рис. 1.8, а), то напряжение на конденсаторной батарее UK будет про�тивоположно по фазе напряжению на реакторе и, следовательно, U2 = Uк - Up, откуда согласно уравнению (1.5) получим:
Следовательно, напряжение на конденсаторной батарее
Uк =1,125 U2 (1.7)
повысится на 12,5% против напряжения на шинах и при напряжении на шинах 27,5 кВ достигнет UK=1,125-27,5=31,0 кв. Ток останет�ся тем же, следовательно, на 12,5% увеличится и мощность конденса�торной батареи. Учитывая протекание через батарею тока 3-й гармо�ники, увеличивают ее мощность не на 12,5, а на 20 %. [20].
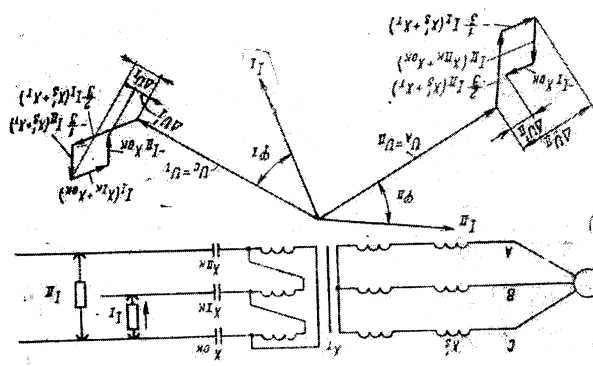
На тяговых подстанциях установки ППК включают к вторичным обмоткам трансформаторов. [22].
Выше были приведены схемы замещения и соответствующие им векторные диаграммы для различных схем соединения трансформа�торов. Если для примера на подстанциях с трансформаторами Y/ принять, что установки ППК будут включены в I и II фазы, то в схе�мах замещения и векторных диаграммах токи I1 и I11 будут представлять геометрическую сумму токов
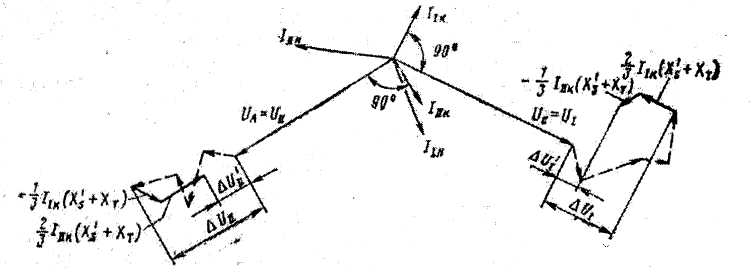
Рис. 1.6.
Векторная диаграмма для подстанции с трехфазными трансформатора�ми Y/ и установками ППК
нагрузки I1н и I11н и соответст�вующих конденсаторных батарей I1к и I11к, т. е. I1 = I1н + I1к и I11 = I11н + I11к.
В соответствии с [23] векторная диаграмма (рис. 1.9) построена в развитие диа�граммы с добавлением двух токов I1к и I11к (сдвинутых вперед на 90° относительно «своих» напряжений, т. е. соответственно U1 и U11). Затем добавлены потери напряжения от I1к и I11к (сплошные линии) к потерям напряжения от I1н и I11н (показанным штриховыми линиями). Из диаграммы видно, что конденсаторные батареи, вклю�ченные как в «свою», так и в «соседнюю» фазу, дают уменьшение по�терь напряжения (см. рис. 1.9: U1<U1 и U1<U11 ) и, следова�тельно, увеличение напряжения на соответствующих фидерных зо�нах. При этом, так как потери напряжения на обеих фазах I и II соответственно опережающей и отстающей уменьшаются, то напряже�ние в них выравнивается. Влияние батареи смежной зоны при равных мощностях батарей в 4 раза меньшее. Действительно, от «своей» бата�реи в расчет входит ток 2/3Iс, а от соседней 1/3Ic. Кроме того, вектор первого из них располагается параллельно напряжению, а вектор вто�рого повернут на угол 60°(cos 60°=1/2) и, следовательно, потеря напряжения от тока батареи смежной зоны в 4 раза меньше.
Поперечная компенсация может располагаться и в промежутке между подстанциями, например, на секционном посту. [20]. В этом случае могут быть дополнительно уменьшены потери энергии в тяговой сети и повышено напряжение в ней. При малой нагрузке на фидерной зоне напряжение может выйти за допускаемые пределы, учитывая что мощность ППК растет с увеличением напряжения. Наоборот при большой нагрузке и связанным с этим понижении напряжения в сети эффект от ППК будет по той же причине сильно падать. В этих усло�виях целесообразно применять регулируемую установку.
В последнее время на железных дорогах начали применять ступенчато-регулируемые установки, поперечной компенсации. [16].
1.3. Повышение коэффициента мощности и стабилизация напряжения контактной сети с помощью продольной компенсации
Напряжение на локомотиве переменного тока изменяется вследст�вие потерь в системе, трансформаторах подстанции и тяговой сети, где основной является индуктивная составляющая сопротивления. Уменьшить это сопротивление можно, включив конденсаторную бата�рею последовательно с нагрузкой (рис. 1.10, а), т. е. осуществив так называемую продольную компенсацию (ПДК) [19].
На рис. 1.10, б показано напряжение в соответствующих точках. В месте расположения установок ПДК напряжение скачком увеличи�вается на величинуUk, представляющую собой арифметическую раз�ность между напряжением Uн и U2.
На векторной диаграмме рис. 1.10, в вектор падения напряжения в
емкости IHХк отстает от тока IH на 90° и, добавляясь к вектору Uн, дает U2. Угол сдвига фаз 2 меньше угла н из-за реактивной мощности, потребляемой конденсаторной батареей ПДК. В начале линии угол 1. опять увеличился вследствие потерь реактивной мощности в индуктивности системы Xs.
В соответствии с векторной диаграммой рис. 1.10, в потеря напря�жения может быть представлена выражением U=IнХs sin н + IнRscos н-IнХкsin н. После преобразований имеем:
U = Iн [R9 cos н + (Хs-Хk) sin н] (1.8)
Выражение, заключенное в квадратные скобки, называют состав�ным сопротивлением и обозначают через ZС. Увеличивая ХК, можно уменьшить потерю напряжения U до нуля и даже сделать ее отрица�тельной.

Рис. 1.7. Продольная компенсация:
а - схема замещения; б - диаграмма распределения напряжения; е - векторная диаграм�ма; ИП - источник питания; Э - потребитель (электровоз); Xs и Rs - индуктивное и ак�тивное сопротивления системы от источника питания до места расположения ПДК; Хк - сопротивление ПДК; U1, U2 и Uн - напряжения в начале и конце линии, последние - до и после ПДК; Iи - ток нагрузки; н - угол сдвига фаз между током Iн и напряжением Uн
Основная задача продольной компенсации заключается в уменьшении реактивного сопротивления системы. При ее применении, однако, одновременно несколько уменьшается и угол сдвига фаз в на�чале линии, что улучшает коэффициент мощности в системе [33].
Установки продольной компенсации (см, рис. 1.7, а) могут рас�полагаться в любой точке от источника питания (ИЛ) до потребителя (электровоза). В зависимости от места расположения этих установок условия работы и влияние их на напряжение у потребителя будут разными. На рис. 1.11 показаны возможные места расположения уста�новок ПДК для наиболее простой схемы питания тяговых подстанций от линии передачи. Перепад (скачок) напряжения на установках ПДК пропорционален току, протекающему через них. Если через установки ПКД протекает ток только данного потребителя, то и скачок напряже�ния зависит только от тока этого потребителя. Если же через установки ПДК протекают токи и других потребителей, то перепад напряжения зависит уже и от последних. При этом надо учитывать, что напряже�ния за установками ПДК не должно быть выше допустимого для обо�рудовании, присоединяемого к этой точке. Следовательно, нельзя в «запас» выбрать емкость установок ПДК так, чтобы компенсировать потери напряжения для удаленных потребителей, так как тогда у бли�жайшего потребителя (на трансформаторе подстанции или электровоза) напряжение выйдет за допустимые пределы.
При расположении устройств ПДК в точках а, б, в, г (см. рис. 1.11) через них будут протекать суммарные токи подстанций и компенсиро�ваться будут только потери напряжения в линии передачи до соответ�ствующей полстанции. Например, при расположении установки ПДК в точке в для подстанций П3 и П4 будут скомпенсированы потери в ли�нии на длине от источника питания до подстанции П3 от токов под�станций П3 и П4.
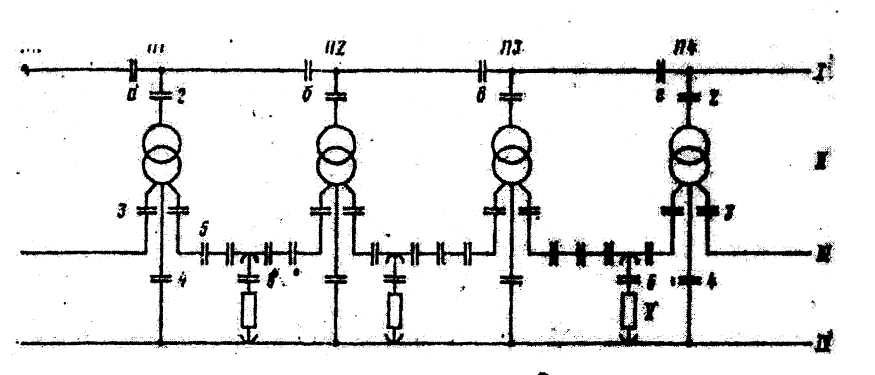
В случае расположения установки ПДК в точке 2 на вводе тяговой подстанции будут скомпенсированы потери напряжения в линии до дан�ной подстанции. При таком расположении не удастся скомпенсировать потери напряжения в линии до данной � подстанции от нагрузок других подстанций и потери до других подстан�ций от нагрузки данной. Можно выбрать Хк с некоторым за�пасом так, чтобы скомпенсировать потери в линии от токов других под�станций. Однако при этом приходится
Рис. 1.8.
Схема возможного расположения установок ПДК:
I - линия передачи высокого напряжения; II - тяговые подстанции; III - контактная сеть; IV - рельсы; V – электровоз
иметь в виду, что увеличение нагрузки данной подстанции при отсутствии ее (или малом значении) на смежных может привести к недопустимому увеличению напряже�ния на этой подстанции. В этом случае, очевидно, необходимо уметь определить минимальные значения нагрузок от остальных подстан�ций, которые могут появляться столь часто, что с ними придется счи�таться.
При расположении установок ПДК в точках 3 (на фидерах, питаю�щих контактную сеть) можно скомпенсировать дополнительно еще и потери в трансформаторах подстанции, вызываемые токами данной фи�дерной зоны (плечо подстанции).
Если применяются однофазные трансформаторы, то установки ПДК можно включить вместо питающего в обратный провод.
Компенсация индуктивных потерь напряжения может быть до�стигнута и при распределенном размещении установок ПДК на кон�тактной сети (в точках 1, см. рис. 1.11). При этом контактная сеть в месте расположения установок ПДК секционируется и секционное разъединение шунтируется ПДК.
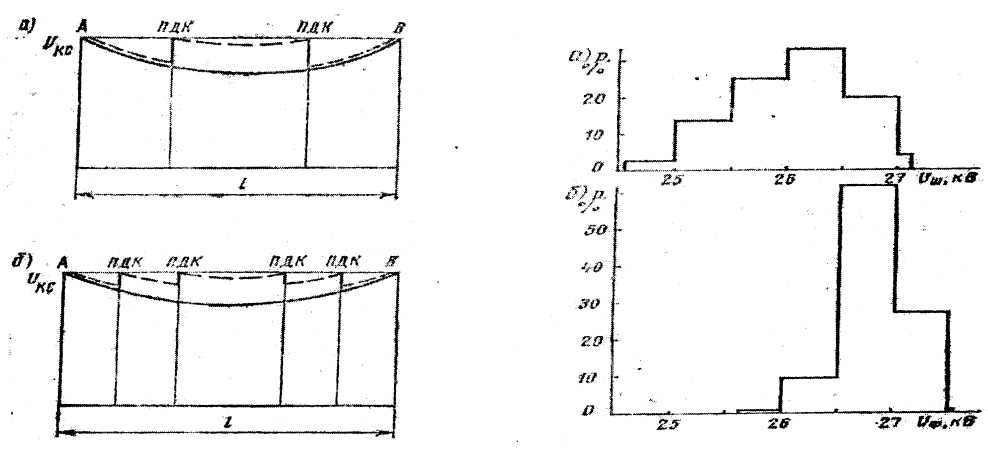
Если условно представить себе нагрузку на фидерной зоне длиной L между двумя подстанциями А и В равномерно распределенной, то кривая напряжения вдоль по фидерной зоне, имеющая первоначаль�но форму параболы, будет стремиться к прямой линии а увеличением числа установок ПДК (рис. 1.12). Здесь сплошной линией показано изменение напряжения (в утрированном виде) вдоль линии без ком�пенсации и штриховой - c компенсацией, на рис. 1.12, а - для двух, а на рис. 1.12, б - для четырех установок.
Из рис. 1.12 видно, что при проходе электровозом установок ПДК напряжение на нем будет изменяться скачком и тем большим, чем боль�ше емкость Хк. Поэтому Хк не может быть больше некоторого значе�ния, определяемого допустимым скачком напряжения на электровозе.
На двухпутных участках переменного тока потери напряжения в контактной сети индуктируются и токами смежного пути. Эти состав�ляющие, естественно, компенсироваться не будут.
Наконец, последним местом расположения ПДК может быть сам электровоз (см. рис. 1.11). В этом случае можно полностью компенсировать индуктивные потери напряжения до электровоза от его тока, но, конечно, нельзя повлиять на потери от всех других нагрузок этой и смежных фидерных зон. Неоспоримым преимуществом устройств ПДК является автоматич�ность и безынерционность действия по компенсации реактивных составляющих потерь напряжения. Это качество особенно ценно в условиях резких ,и случайных изменений, что свойственно тяговой нагрузке [19].
Полезно выяснить влияние ПДК на содержание гармоник в соста�ве напряжения на электровозах и нетяговых потребителях (асинхрон�ные двигатели и освещение). [34].
|
Рис. 1.9.
Напряжение в тяговой сети U не при распределенном размещении установок установок ПДК и равномерной нагруз�ке в фидерной зоне: i - при двух ПДК., 6 - при четырех ПДК
|
Рис. 1.10.
Гистограммы напряжения на подстанции переменного тока с установками ПДК: а-на шинах подстанции (до 6 - на филере (после установки ПДК)
|
Гармоники в кривой напряжения переменного тока возникают в свя�зи с потреблением несинусоидальных токов. Последние, протекая по си�стеме электроснабжения, вызывают падение напряжения соответствую�щей частоты. А так как у источника энергии кривая напряжения синусоидальна, то разность напряжений по каждой гармонике между на�пряжением источника энергии и падением напряжения равна этому же падению напряжения с обратным знаком.
Напряжение на установках ПДК растет о увеличением протекаю�щего по ним тока. Поэтому при коротких замыканиях напряжение мо�жет достигать опасных значений, тем более что применение ПДК ве�дет к увеличению тока короткого замыкания. Для устранения пробоя конденсаторов параллельно им приходится включать разрядники. Кроме того, использование ПДК приводит и к некоторым другим ус�ложнениям. Так, значительное уменьшение сопротивления линии при параллельной работе подстанций приводит к увеличению уравнитель�ных токов и в некоторых случаях может сделать параллельную работу нецелесообразной. [4].
Продольная компенсация может включаться в питающие линии (фидера) или в отсасывающий провод. В первом случае через них пой�дет ток фидера, а во втором - ток подстанции.
На рис. 1.14 показаны схема и диаграмма для подстанций с. транс�форматорами, соединенными по схеме V/V.
Как и выше, фазу с напряжением Uab, опережающим не рабочую СА на 240°, обозначается номером I, фазу ВС, опережающую нерабочую на 120° или, иначе, отстающую от фазы I на 120°, обозначается номером II и нерабочую - номером III. Соответственно сопротивления ПДК в фи�дерах и отсасывающем проводе обозначается XIк, ХIIк и Хок, ток - II и III,- углы - I и II, потери напряжения - UI и UII.
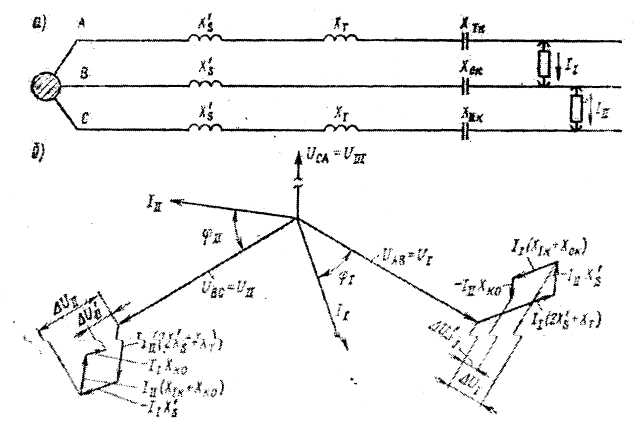
Рис. 1.11.
Схема (а) и векторная диаграмма (б) для подстанции со схемой трансформаторов V/V при применении продольной компенсации
Выражения для U' можно получить, добавив к выражениям U и потери напряжения в XIк, ХIIк и Хок. Для схем - V/V (при Rs = RT = 0):
U'I= U'AB = II (2Х’S + Хт - XIк - Хок) sin I -
- III (Х’S - Хок) sin (120° + II); (1.9)
U'II= U' BC = III (2Х’S + Хт - XIIк - Хок) sin II -
- II (Х’S - Хок) sin (240° + I); (1.10)
Для схемы Y/ (рис. 1.15) получим U'I при Rs = RT = 0:
U'I =2/3 II sinI -1/3 III sin (120° + II)]( Х’S + Хт) -
- II (XIк - Хок) sin I + III Хок sin (120° + II) (1.11)
и для UII :
U'II =2/3 III sinII -1/3 II sin (240° + I)]( Х’S + Хт) -
- III (XIIк - Хок) sin II + II Хок sin (240° + I) (1.12)
Некоторое уменьшение угла сдвига фаз дает и применение продоль�ной компенсации.
При питании электровозов с электронными преобразователями на�блюдается обратная картина - с увеличением напряжения, вызван�ным уменьшением индуктивности питающей электровоз сети, несколь�ко увеличивается коэффициент мощности, т. е. эффект от использова�ния установок продольной компенсации увеличивается.
Рис. 1.12.
Схема (а) и векторная диаграмма (б) для подстанции со схемой транс�форматоров Y / при применении продольной компенсации
Более полное решение рассматриваемой проблемы будет получено при совместном использовании схем поперечной и продольной ком�пенсаций. [18,19,20,21].
1.4. Выбор оптимальных параметров установки продольно-поперечной компенсации
На тяговых подстанциях переменного тока широкое распространение получили нерегулируемые батареи по�перечной компенсации (УК). Эти установки просты, на�дежны и хорошо зарекомендовали себя в эксплуатации. Однако у них есть и ряд недостатков. Например, при увеличении нагрузки напряжение в месте подсоединения УК падает, при этом уменьшается мощность реактивной энергии» отдаваемой батареей в сеть. Если участок работает в режиме, близком к режиму холостого хода, то напряжение в месте расположения конденсаторов увеличивается может превысить допустимое. В литературе описывается ряд методов позволяющих до некоторой степени избавиться от этих недостатков.
В работах [18, 19, 20, 21, 30] предложены установки продольно-поперечной компенсации (УППК). В ее состав входят последовательно включенные конденсаторы, которые вы�полняют роль стабилизаторов напряжения. Обладая простотой и надежностью УК, эти устройства свободны от некоторых их недостатков - при правильно выбран�ных параметрах напряжение на их шинах с изменением нагрузки остается постоянным или почти постоянным .
Анализ работы УППК проводился различными авторами [2, 3, 20, 21], но в настоящее время еще нет достаточ�но обоснованной методики выбора их параметров. Мощности параллельной и продольной батарей должны быть выбраны такими, чтобы приведенные затраты при про�чих равных условиях получились минимальными. [16]. Причём напряжение в контактной сети в момент минимума нагрузки не должно превышать максимально допустимого, а в режиме наибольших токов быть не ниже минимального.
Эта задача может быть реализована следующим образом. Найти min з = f(пк; Хпр ; Zкс ; J ) при ограничениях:
(1.13)
где U = y(пк; Хпр ; Zкс ; J )
U = UminUmax
Qпк - мощность параллельно включенных батарей
Хпр _- реактивное сопротивление продольной батареи
Zkc - суммарное сопротивление тяговой и пита�ющей сетей;
J - ток нагрузки последовательной батареи.
Выражение UminU должно удовлетворяться в ре�жиме максимальных нагрузок при использовании полной пропускной способности участка. Соотношение UmaxU проверяется в момент холостого хода фидерной зоны или тяговой подстанции.
Представленная в таком виде задача является ти�пичной задачей математического программирования [13, 14]. В зависимости от вида целевой функции и области осу�ществимых решений задачи поиска экстремальных решений могут быть разделены на несколько классов. Для того чтобы верно классифицировать задачу и выбрать метод ее решения, необходимо исследовать вид целевой функции и область осуществимых решений [14, 15].
Если не учитывать затраты зависящие от изменения уровня напряжения, то вид целевой функции определится выражением (1.14):
(1.14)
где Кkonst - капиталовложения на устройство УППК, не зависящие от величины варьируемых параметров Qnp и Хnp ;
Ц1,Ц2,Ц3 - цена 1 кВА соответственно батарей поперечной компенсации, последовательных батарей и стоимость электроэнергии;
K1p K2p - стоимость 1 кВА реактора УК,
Как видно из (1.14), целевая функция нелинейна и раз�рывна [20, 22]. Разрыв имеет место в точке Qпк = 2130. кВА, так как для батареи мощностью более 2130 кВА необ�ходим в цепи более мощный реактор.
Построение области осуществимых решений проводит�ся следующим образом. При различных значениях Qпк и Хnp в режиме холостого хода определяется нап�ряжение и выбираются только те соотношения варьируе�мых параметров, которые удовлетворяют условию UUmax. Те же вычисления делаются при расчетном токе наг�рузки [9].
Для определения напряжения и токов в схеме удобно воспользоваться методом активного двухполюсника, Параметры эквивалентного генератора (рис. 1.16, в) лег�ко определяются из схемы замещения и векторной диаграммы (рис. 1.16 а, в). Векторная диаграмма построена для случая, когда Ххх носит
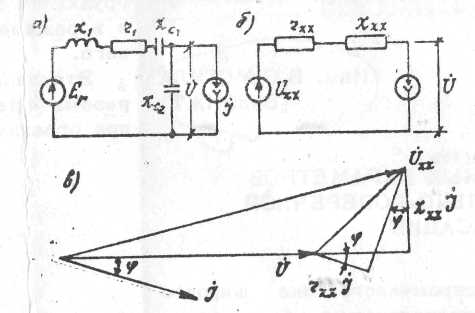
Pис. 1.13
Параметры замещения эквивалентного генератора
индуктивный характер. Сопротивление холостого хода эквивалентного генера�тора определяется формулой
(1.15)
После преобразования и разделения действительной и мнимой частей выражения (1.15) имеем:
(1.16)
Комплекс напряжения определяется формулой
(1.17)
Тогда, согласно векторной диаграмме (рис. 1.16 в), действующее напряжение на шинах УППК определяется выражением.
(1.18)
Потери мощности в сопротивлениях схемы можно найти из соотношения
(1.19)
Полученные выражения для конкретной схемы позво�ляют найти значение приведенных затрат, а также оп�ределить вид области осуществимых решений.
В качестве примера взят участок со следующими па�раметрами:
r1 = 3,6 Ом; X1 =. 16,4 Ом; E = 27,5 кВ; J = 300 А; = 37°. Мощность батареи изменяется от 0 до 10 мВА через 500 кВА.
Xпр варьируется от 0 до 12,5 Ом.
Результаты расчетов, проведенных по формулам (1,15)-(1,19), представлены в виде кривых на рис. 2. Здесь ли�ния ABC представляет собой ограничивающее условие UUmax = 29 кВ, линия DBF описывает условие UUmin=25 кВ в рабочем режиме. Пространство, зак�люченное между этими кривыми, является областью осу�ществимых решений задачи.
В заключение можно сделать следующие выводы.
В тяговых сетях переменного тока экономически вы�годно использовать установки продольно-параллельной компенсации.
Выбор параметров УППК является задачей математического программирования [4, 6, 8, 9].
Целевая функция нелинейна и разрывна.
Ограничивающие условия нелинейные.
При двух варьируемых параметрах задача может быть решена графически.
В случае многомерных задач как указано в [7, 13], удобно использовать метод Монте-Карло.
Оригинальный способ и устройство компенсации реактивной мощности на электроподвижном составе однофазно-переменного тока с зонно-фазовым регулированием, в качестве устройства для повышения коэффициента мощности предложен Кашириным В.В. и др. [26]. Технический результат заключается в компенсации реактивной мощности, потребляемой электровозом, и снижении расхода электроэнергии. Компенсатор реактивной мощности (КРМ) подключают поочередно к одной из нескольких секций вторичной обмотки тягового трансформатора, питающих соответствующие плечи выпрямительно-инверторного преобразователя. В зависимости от значения реактивной мощности цепи, подключают секции источника реактивной мощности к источнику питания. Устройство, реализующее предложенный способ управления КРМ. дополнительно содержит ключи, через которые КРМ подключают к секциям вторичной обмотки тягового трансформатора, блок управления ключами, задатчик режима работы, датчики напряжения и тока, вычислительно-измерительный блок.
Одной из проблем, связанных с внедрением на э.п.с. переменного тока компенсаторов реактивной мощности (КРМ). является поиск оптимальных режимов работы КРМ. способствующих снижению расхода электроэнергии на э.п.с. в целом.
Необходимость повышения коэффициента мощности э.п.с. можно объяснить следующим образом. Допустим, что э.п.с. мощностью Р работает с cos= (активная нагрузка) при синусоидальном напряжении U. В этом случае сила тока в цепи составит . а мощность тепловых потерь
.
На практике эксплуатация э.п.с. осуществляется с cos <1 (смешанная нагрузка), сила тока в цепи будет больше
.
Увеличение силы тока в цепи приводит к увеличению тепловых потерь
.
Таким образом, электрические потери пропорциональны квадрату cos.
Так, например, повышение cos=0.8 на 15% приводит к снижению потерь в питающей сети на 41%!
Наряду со снижением потерь в питающей цепи, благодаря повышению коэффициента мощности, наблюдаются существенные тепловые потери в элементах компенсатора - главным образом в дросселе, тиристорном ключе и конденсаторах. Поэтому учет сочетания потерь от применения компенсирующих устройств является важной сдачей повышения энергетических показателей на современном э.п.с. оборудованном КРМ.
Известен способ управления компенсатором реактивной мощности [27] (патент РФ №2187185), состоящий в том, что компенсацию реактивной мощности осуществляют коммутацией источников питания с источником реактивной мощности посредством четырехквадратного преобразователя. Такой способ существенно повышает коэффициент мощности, однако использование дополнительно четырех квадрантного преобразователя чревато усложнением системы управления, необходимостью использования дорогостоящей элементной базы и ряду с повышением коэффициента мощности при различных режимах работы преобразование энергии сопровождается дополнительными потерями мощности, в элементах четырехквадратного преобразователя.
В [28] (патент РФ №2187872) предложен способ, при котором требуемую величину и форму мгновенного тока на сетевом входе достигают в результате сложения токов компенсатора реактивной мощности и компенсатора мощности искажения, причем управление вентилями компенсационного выпрямителя осуществляют путем трехкратного включения каждого вентиля на периоде сетевого напряжения в моменты равенства периодических опорных напряжений и управляющих напряжений.
При таком способе управления снижается коэффициент полезного действия системы компенсации реактивной мощности, поскольку с увеличением количества коммутаций за период ceтeвoгo напряжения увеличивается величина электрических потерь.
Известен также способ управления компенсатором реактивной мощности, [29] (патент РФ №2212086). при котором определяют значение реактивной мощности цепи, в зависимости от напряжения и тока нагрузки, подключают к источнику питания (секциям вторичной обмотки тягового трансформатора) источник реактивной мощности, причем вне зависимости от зоны регулирования, источник реактивной мощности подключают к источнику питания с максимальной мощностью. Способ реализуют устройством, содержащим компенсатор реактивной мощности, состоящий из двух LC-контуров. подключенных постоянно к источнику питания с максимальной мощностью.
Этот способ имеет недостаток: LC-контур постоянно подключен к источник питания. При работе с малыми нагрузками величин, собственных потерь в компенсаторе реактивной мощности (Рку) превышает величину снижения потерь цепи питания от применения компенсатора (Ро). Энергетическая характеристика этого способа управления приведена на рис.1.17. На ней показано, что с ростом реактивной мощности цепи Qd абсолютные потери Ро от компенсации реактивной мощности в цепи питания снижаются более интенсивно, чем растут собственные потери в компенсаторе Рку. Поэтому в диапазонах работы, признаком которых является отрицательная разность Рку -Ро, система компенсации реактивной мощности неэффективна, поскольку рост потерь в реактивных элементах компенсатора преобладает над снижением потерь от компенсации реактивной мощности. Значение реактивной мощности Qd является точкой равновесия собственных потерь мощности компенсатора и величины снижения потерь мощности цепи от применения компенсации реактивной мощности. При Qd>Qо наблюдается эффективность компенсации реактивной мощности.
Устройство, реализующее данный способ управления, содержит тяговый трансформатор, выпрямительно-инверторный преобразователь электровоза с подключенным к нему тяговым двигателем, два источника реактивной мощности, состоящие из последовательно соединенных индуктивности и емкости, датчик режима сети, включающий в себя датчик напряжения и датчик тока, блок синхронизирующих импульсов, блок управления и коммутатор. Такое устройство имеет следующий недостаток – IС - цепи компенсатора реактивной мощности постоянно подключены на суммарное напряжение всех источников питания, хотя при работе с малыми нагрузками достаточно работать от одного или нескольких (но не всех) источников питания. Препятствием этому является невозможность переключать LC-компенсатор на от шальные источники питания. Поэтому при работе с малыми нагрузками величина потерь может превышать экономию энергии от применения КРМ. что не может гарантировать стабильный благоприятный баланс, но расходу электроэнергии вследствие перекомпенсации реактивной мощности.
Данная схема разработана для снижения расхода электроэнергии потребляемой э.п.с.
Поставленная задача достигается способом управления, при котором задают значение минимально допустимой реактивной мощности источника реактивной мощности, а также максимальное значение реактивной мощности источника реактивной мощности при подключении к различным источникам питания, для каждой рабочей зоны регулирования напряжения тяговых двигателей определяют величину реактивной мощности нагрузки, уравнивают максимальное значение реактивной мощности источника реактивной мощности при работе от различных источников питания с фактическим значением реактивной мощности нагрузки и подключают минимально превосходящий по значению реактивной мощности нагрузки источник реактивной мощности к соответствующему источнику питания, при снижении значения реактивной мощности источника реактивной мощности ниже минимально допустимого значения отключают источник реактивной мощности от источника питания. С целью снижения броска тока в моменты времени между переключениями с одного источника питания на другой или в моменты времени, предшествующие повторному подключению источника реактивной мощности к источникам питания, и исключения возможного дребезга контактов при колебании Qd в области значений Qo Qkvi и Qky2 к источнику реактивной мощности на время, равное, например. 5 с. определяемое постоянной времени разряда емкости на активное сопротивление цепи КРМ, подключают активную нагрузку.
Устройство для компенсации реактивной мощности содержит тяговый трансформатор с несколькими секциями вторичной обмотки, нагрузку, выполненную в виде выпрямительно-инверторного преобразователя электровоза с подключенными к нему преимущественно несколькими тяговыми двигателями, источник реактивной мощности, представляющий собой КРМ и состоящий из последовательно соединенных индуктивности и емкости, датчика напряжения и датчика тока, тиристорный ключ и блок управления тиристорным ключом. В устройство дополнительно введены ключи для подключения источника реактивной мощности к соответствующим источникам питания. блок управления ключами, задатчик режима работы для задания номера зоны регулирования напряжения и вычислительно-измерительный блок для определения моментов коммутации КРМ к соответствующим источникам питания.
КРМ подключается только к тем источникам питания, от которых работает преобразователь. В целях снижения расхода электроэнергии исключается работа КРМ с низкими нагрузками. при которых собственные потери КРМ могут превысить снижение потерь в цепи от его применения.
Сказанное позволяет сделать вывод о причинно-следственной связи между совокупностью существенных признаков и достигаемым техническим результатом.
На приложенных к описанию чертежах показано:
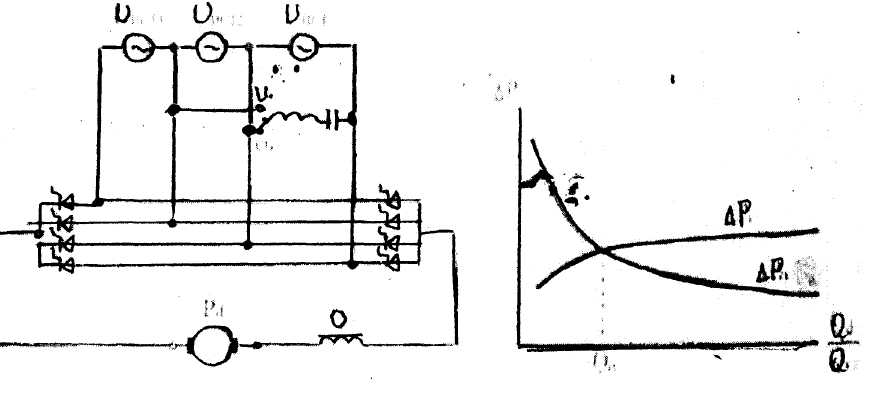
Рис. 1.15
Устройство, реализующее данный способ управления (фиг. 1.18), содержит тяговый трансформатор 1, преимущественно с несколькими вторичными обмотками, выступающими в качестве источников питания, выпрямительно-инверторный преобразователь (ВИЛ) электровоза с подключенными к нему преимущественно несколькими тяговыми двигателями (ТД) 3. компенсатор реактивной мощности (КРМ) 4, датчик напряжения контактной сети (ДМ) 5, датчик тока цепи тяговых двигателей (ДТ) 6. ключи (СК) 7. состоящие из ключа К1 и ключа К2, работающих в противоположных состояниях, блок управления ключами (БУСК) 8. тиристорный ключ (ТК) 9, блок управления тиристорным ключом (БУТК) 10. задатчик режима работы, в качестве которого может быть использован контроллер машиниста э.п.с. (КМ) 11. для задания номера зоны регулирования, вычислительно-измерительный блок (БВИ) 12 для определения моментов коммутации КРМ к соответствующим источникам питания. Параллельно конденсатору КРМ 4, через нормально замкнутые ключи 13 и 14 подключи резне то 15 для разряда остаточной емкости в моменты переключения КРМ 4 с одного источника питания на другой во избежание значите п.пых бросков тока. Компенсатор реактивной мощности 4 выполнен в виде модуля и состоит из LC-контура, управляемого ключами 7 г 9. для подключения его к вторичным обмоткам тягового трансформатора 1. В качестве управляемых ключей 7 могут использоваться koнтакторы обеспечивающие ступенчатое изменение реактивной мощности, и тиристоры 9. обеспечивающие плавное изменение реактивной мощности компенсирующего устройства. КРМ обеспечиваем две ступени реактивной мощности в зависимости от подключения к выводам обмоток тягового трансформатора 1. Блок управления ключами X обеспечивает включение и выключение ключей 7 по сигналам, поступающим из вычислительно-измерительного блока 12. а также включение и выключение ключей 7 без обрыва силового тока. Блок управление тиристорным ключом 10 обеспечивает формирование сигналов управления в соответствии с алгоритмами, реализующими данный способ управления, безударное подключение LC-контуров КРМ 4 к обмотке тягового трансформатора 1 в момент перехода напряжения на тиристорном ключе 9 через ноль, а также отключение LC-контуров КРМ 4 от обмотки тягового трансформатора 1 в момент перехода Тока тиристорного ключа 9 через ноль. Задание номера рабочей зоны питания Nz, характеризующего уровень питающего напряжения. формируемого подключением определенных источников напряжения к нагрузке, осуществляется переключением позиций электромеханического контроллера машиниста 11.11ри подключении КРМ 4 к источнику питания 1 одной из пар управляемых ключей 7 К1 или К2 происходит отключение одного из нормально замкнутых ключей К1 13 пли К2 14. с целью разрыва цепи разрядного резне юра 15, представляющего собой чисто активную нагрузку. Этим исключаются дополнительные потери при работе КРМ 4. На практике время разряда до приемлемого уровня выбирают на уровне 5 с.
Вычислительно-измерительный блок 12 по информации, полученной с датчиков тока 6 и напряжения 5. задатчик режима работы ( КМ) 11 выполняет измерение фактической реактивной мощности на токоприемнике электровоза, определение реактивной мощности, генерируемой КРМ. формирует сигнал на включение необходимой ступени КРМ, а также выполняет отключение КРМ или его модулей путем снятия управляющих импульсов при нарушениях заданных (нормальных) режимов работы. БВИ 12 осуществляет также и защиту от коммутационных перенапряжений на тиристорах ключевых элементов, от перегрузок по току, от внешних и внутренних коротки: замыканий, от замыканий на землю, а также от повышения напряжения на конденсаторах LC-контуров свыше номинального напряжения.
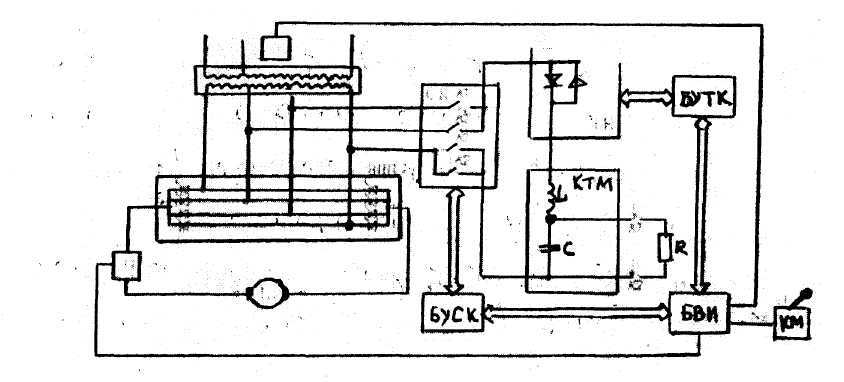
Рис. 1.16
БВИ 12 состоит из микропроцессора, оперативного запоминающего устройства (ОЗУ), постоянно запоминающего устройства (ПУ), аналогово-цифрового преобразователя (АЦП) и таймеров-счетчиков. Микропроцессор. ОЗУ, ПЗУ, АЦП, и таймеры-счетчики могут быть выполнены на базе промышленного контроллера М167-1х (каталог продукции АО "КАСКОД" “Бортовая и промышленная электроника”, 189625, С-Петербург, Павловск, Фильтровское шоссе. 3 (тел. (812)466-5784, (812)476-0795). с.66).
Устройство, реализующее предлагаемый способ управления компенсатором реактивной мощности, работает следующим образом. При включении питания начинается работа вычислительно-измерительного блока 12. и определяют величину реактивной мощности нагрузки на основании информации с датчиков по формуле Qd=Рdtg где Рd=IdUd - Id - ток нагрузки. Ud - напряжение на нагрузке, определяемой в зависимости от Id по внешним характеристикам преобразователя, записанным в ПЗУ БВИ 12, - сдвиг фаз между током и напряжением источника питания. При работе электровоза с реактивной мощностью Qd выше минимально допустимого значения подключают одну секцию КРМ к источнику энергии с наименьшим значением (Uист1), после чего снова определяют реактивную мощность цепи Qd и сравнивают ее значение со значением реактивной мощности работающей секции Qку1- . При превышении реактивной мощности нагрузки Над величиной мощности компенсатора переключают секцию компенсатора к источник) с большим напряжением (Uист2), после чего сравнивают значение реактивной мощности цепи с величиной мощности компенсатора Qку2- и если оно ниже, то выполняют переключение компенсатора на источник напряжения с меньшим значением (Uист1). причем в моменты переключения замыкают ее на активное сопротивление 15 (разрядный резистор) с тем. чтобы при необходимости ее повторного подключения на источник питания избежать броска тока в цепи. Процесс повторяется циклически.
Таким образом, предлагаемый способ управления компенсатором реактивной мощности и устройство, его реализующее, обеспечивают повышение коэффициента мощности и снижение расхода электроэнергии э.п.с.
В работах А.А. Германа [20] рассмотрены эффективность применения регулируемых и нерегулируемых батарей поперечно – емкостной компенсации для определенного симметрирования напряжения в месте их установки уменьшеннием тока обратной последовательности и потерь энергии на ЛЭП и элементах подстанцие оборудования. Показано также, что при большой несимметрии тока (напряжения) преимушейство имеют регулируемые двухфазные и трехфазные емкостные батареи перед нерегулируемыми.
Экспериментальные исследования физической модели электрифицированного участка переменного тока с пофазнорегулируемыми вентильными компенсаторами, выполненные Е.Г. Бобровым [30] позволи определить закон пофазного регулирования в зависимости от величины и характера нагрузки плеч питания. Здесь выявлено также, что лучшим гармоническим составом характеризуется управляемый реактивный блок с фильтром 150 Гц, приведенный на рис 1.19.
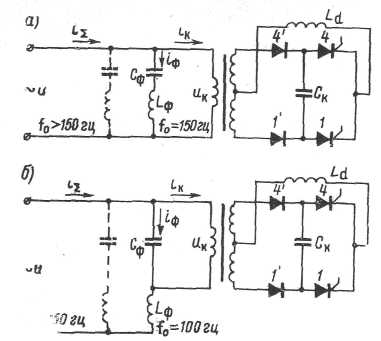
Рис.1.17
Варианты включения компенсатора с фильтром
Использование реактивных блоков в пофазнорегулируемом источники реактивной мощности незначительно повышает уровень гармоник в токе контактной сети, но в тоже время улучшает гармонический состав напряжения на шинах подстанции и тока в ЛЭП.
В работе [Тр. ЦНИН Вып. 492] А.Г. Пятковой на основе сравнительной оценки по отношению (где и соответственно средные потери мощности при компенсации и мощности без компенсации) в зависимости среднестатистического отношения токов плеч питания рис. 1.20, сделан ценный по нашему мнению вывод, что экономическую эффективность регулируемых источников реактивной мощности, их оптимальную мощности и место установки следует определять в каждом конкретном случае учетом характера нагрузки, влияния уравнительных токов, качества напряжения у районных потребителей, устанавливать их в первую очередь в участках с большой неравномерностью и значительной величиной нагрузки.
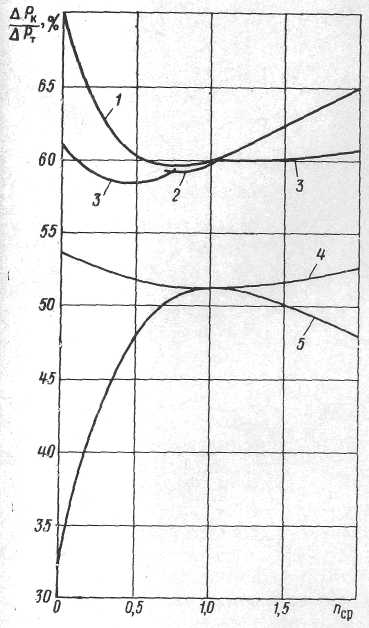
Рис. 1.18
Расчетные соотношения и характеристики плавно регулируемых вентильных компенсаторов реактивной мощности (ВКРМ) в первые были выполнении Е.Г. Бобровым [20]: по кретерию эффективности использования коммутирующего конденсатора
где Qr, Qc, – соответственно реактивная мощность генерируемая преобразователем в сеть и отдаваемая конденсаторами в сеть.
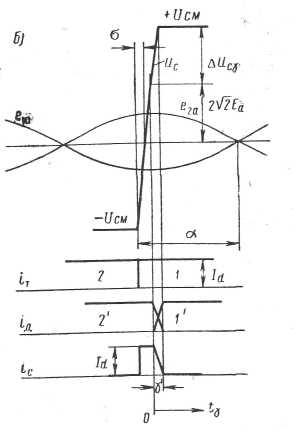
Расчет произведен для ВКРМ по рис 1.21.
Рис. 1.19
Рис. 1.20
Интересным с точки дрения поставленных в данной диссертации задач, является работа Р.Р. Мамошина по исследованию возможности оптимизации качества энергии на шинах тяговых подстанций переменного тока с помощью однофазных регулируемых батарей включаемых ко вторичной обмотке тягового трансформатора параллельно тяговой нагрузке по рис. 1.23.
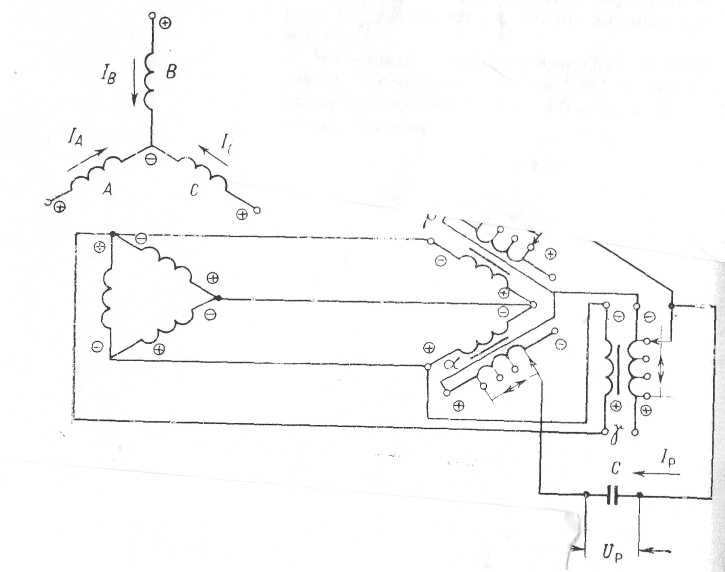
Рис 1.21
Здесь можно регулировать токи прямой и обратной последовательности фазы А, создаваемые батареей
(1.20)
(1.21)
где соответственно токи прямой и обратной последовательности фазы А, формируемые батареей;
- промежуточный коэффициент трансформации обмоток А и С, лежащие в пределах 0 до 1;
трехфазный оператор, равной .
Эта схема приводит к исключению или ограничению в допустимах пределах несимметрии токов, напряжений во всем диапазоне изменения тяговой нагрузки, и к стабилизации напряжения на шинах тяговых подстанций ниже 27 кВ а также к увеличению расстояния между тяговыми подстанциями на вновь электрифицируемых линиях.
Выводы по первой главе.
1. Сравнительная простота и надежность схемы тиристорных регулируемых компенсаторов реактивной мощности с отсекающими диодами в пусковых и стационарных режимах, устойчивость регулирования, а также высокий коэффициент эффективности Кэфф. позволит считать эту схему перспективной для использования в КРМ.
2. Для использования вентильных компенсаторов в устройствах электротяги переменного тока с целью симметрирования системы и стабилизации напряжения необходимо наряду с поисками новых эффективных схем выполнить исследования существующих методов и технических средств мероприятий по снижению уровня высших гармоник.
Глава 2.
Математические модели оптимизационных задач электроснабжения.
2.1. Методы решения оптимизационных задач.
Развитие рыночных отношений в электроэнергетике, высокие требования к надежности и качеству электрической энергии, интенсификация технологических процессов, влияющих на режимы работы электроустановок неизбежно ведет к необходимости оценки их влияния и на проблему оптимизации схем и параметров электроснабжения.
Математические модели оптимизации электроснабжения основаны на их экономико-математическом описании с учетом теории надежности, на решении дифференциальных уравнений аналитическими и численными методами, теории экспертных оценок, теории вероятностей, случайных процессов и математической статистики а также транспортных задач электроэнергетики.
На основании анализа ряда фундаментальных работ, посвященных проблеме оптимизации [1,…5,6,7,8,9,10], задачи оптимизации электроснабжения в частности компенсации реактивной мощности также подразделяется на две основные группы:
К первой группе относятся выбор оптимальных схемных решений, как отдельных схем так и электроаппаратуры в целом. Ко второй группе относятся задачи оптимального выбора номинальных величин и режимов работы. Выбор схемных решений электроснабжения, характеристик её электроустановок, а также их режимов осуществляется как в процессе электрического расчета схем для обеспечения технических характеристик установок так и в процессе определения эксплуатационно-технических характеристик. Ко второй группе относятся также задачи прогнозирования надежности и стратегии оптимальной периодичности профилактического обслуживания установок компенсации реактивной мощности.
Сущность задач электроснабжения второй группы заключается в поиске и учете всех определяющих свойств системы, выраженных математическими моделями, с помощью которых можно составить достаточно полную получить картину поведения системы с экстремальными значениями параметров установок и методы определения оптимальной рабочей области параметров.
В настоящее время методы поиска оптимума можно разделить на две группы: классические и алгоритмические [13].
К классическим методам относятся: дифференциальное исчисление [17], вариационное исчисление [18], динамического программирования максимума Понтрягина.
Алгоритмические методы в свою очередь подразделяются на детерминированные и случайные. К детерминированным методам поиска относятся.
- итерационные [17];
- градиентные [20];
- направленного перебора [21];
- линейного программирования [5,10];
- нелинейного программирования [22];
- к случайным методам поиска относятся;
- методы Монте - Карло [17];
- методы случайного перебора [7, 23].
Особенностью оптимизационных задач электроснабжения является необходимость применения как классических так и алгоритмических методов, так как в них необходимо комплексное определение требуемых характеристик электроустановок и режимов работы систем, обеспечивающих оптимальный уровень безотказности заданной структуры с учетом ограничений технических характеристик, определяющих качество функционирования.
При использовании комплексного метода нахождения оптимума целевой функции необходимо вводить в качестве ограничений формализованные требования:
1) по обеспечении физической реализуемости схемных решений, а также допустимых технических характеристик электроустановок;
2) по обеспечению требуемых уровней выходных параметров (тока, напряжения, мощности, качество электроэнергии, ).
3) в том числе ограничения, учитывающие статическую информацию, полученной при длительной эксплуатации и испытаниях аналогичных схем и их элементов;
4) часть ограничений могут иметь неполную или неопределенную информацию о законах изменения их параметров надежности, сложность учета и невозможность строгой формализации цепи и несовпадение целей системы и подсистем которые ограничивают использование оптимизационных моделей и чаще всего приводит к применению оценочных моделей со всеми их достоинствами и недостатками.
Второй особенностью оптимизационных моделей задач электроснабжения являются: необходимость системного подхода, наличие особенностей больших систем, системного анализа т.е. рассмотрение её как единое целое и учет необходимости её развития, т.е. рассмотрение её как динамической системы, приводящие в конечном виде к нелинейной многоэкстремальной целевой функции. Это проявляется, например, на простом примере связи надежности и экономичности электроснабжения, являющиеся противоречивыми факторами. Это противоречие нужно решать математически компромиссно, путем взаимных уступок.
Генеральным направлением сохранения надлежащей надежности электроснабжения является математическая формализация нормированных допустимых и необходимых значений, коэффициентов статической устойчивости с сохранением динамической устойчивости [4, 5, 6]. Следовательно при экономической оптимизации электроснабжения критерий надежности выступает в виде системы ограничения. Это является третьей особенностью оптимизационных задач электроснабжения.
Сложность учета этих особенностей заключается в том ,что при этом ограничивается использование упомянутых выше оптимизирующих моделей, имеющие с точки зрения общности решения задач, но с определенными недостатками, заключающиеся в обязательном применении итерационных методов оптимизации, т.к. надежностные показатели имеют в большинстве случаев нелинейный характер. Например, вероятность безотказной работы однотрансформаторной подстанции, с последовательным соединением ЛЭП, разъединителя, выключателя, силового трансформатора проводов кабелей и пр. через интенсивность отказов определяется как вероятность безотказной работы всех элементов в течении времени t [11]:
где - интенсивность отказов А. вероятность безотказной работы систем электроснабжении с резервированием замещением, т.е. параллельном соединении определяется надежностью не только основных электроустановок но и устройств АВР, которые также выражаются через экспоненциальные законы.
2.2. Анализ решения оптимизационных задач
Использование для определения экстремума целевой функции аналитических методов в электроснабжении связано со значительными трудностями. Для их преодоления вводится значительное количество допущений и упрощений, приводящих к тому, что результаты аналитической оптимизации даже для простых схем практически трудно реализуемы. От этого недостатка свободны алгоритмические методы, учитывающие только способ отыскания экстремума [9].
Во всех методах оптимизации как и в классической постановке имеются этапы: разработки модели системы, выбор критерия оптимальности, выбор целевой функции и ограничений, поиск оптимального решения и анализ полученных погрешностей.
Модель системы строится исходя из задачи оптимизации с учетом ограничений, требуемой точности и объема имеющейся реальной исходной аналитической информации о системе электроснабжения и функциально – количественной связи электроустановок.
В этом смысле модели электроснабжения, описываемые математически, устанавливающими количественные связи между элементами модели будут экономичными т.к. электроснабжение относится к числу систем, структуры которых считаются достаточно хорошо известными. К ним, например, можно отнести вероятностные модели надежности системы электроснабжения и их электроустановок с восстановлением и профилактикой [11], логико – вероятностные методы расчета надежности с помощью дерева отказа, периодичность профилактического обслуживания основного силового оборудования на основе параметра потока отказов, [16] выбор места установки батарей компенсирующих реактивную мощность, описываемые в интервале времени нормальной системой независимых дифференцируемых уравнений, связывающих k выходных параметров системы с параметрами состояния (Е) и управляемыми параметрами (П) (например профилактических работ и пр.), т.е.
(2.6)
где i=1,2,3,…k; N+M=k, a t1tt2,
с ограничением в виде
(2.7)
Вторым этапом является выбор критерия оптимальности в качестве которого часто принимаются экономические критерии, представляющие собой минимум финансовых, сырьевых, энергетических, трудовых затрат и пр. У местно указать, что во многих задачах электроснабжения, имеющие разные капиталовложения и разные издержки производства в качестве экономического функционала используют так называемые приведенные затраты.
2.3. Линейные оптимизационные задачи повышения коэффициента мощности
Современные потребители электроэнергии синусоидального тока представляют собой активно – индуктивные нагрузки, токи которых по фазе от напряжения источника питания.
С уменьшением потребителя его ток возрастает
.
Генераторы рассчитывают на определенную номинальную мощность , т.е. при номинальном напряжении , они могут быть нагружена током не превышающем номинальное значение.
Работа источника питания в целом характеризуется к.п.д. его установки, состоящем из к.п.д. генератора и первичного двигателя. Работа первичного генератора определяется в основном активной мощностью генератора. Поэтому недогрузка генератора активной мощностью влечет за собой недогрузку и снижение к.п.д. первичного двигателя и всой энергетической установки. Себестоимость передаваемой электроэнергии от этого повышается. Увеличивается потери мощности в ЛЭП:
Мощность активных потерь в ЛЭП, как видно из этого выражения тем больше, чем ниже установки.
Следовательно, чем ниже потребителя, тем дороже будет обходится передача к нему электроэнергии.
Рассмотрим пример расчета емкости батареи конденсатора. Из векторной диаграммы видно, что для получения угла сдвига фаз требуемой величина емкостная ветвь должна иметь ток, равный разности реактивных составляющих токов потребителей для компенсации угла сдвига фаз и после компенсации угла сдвига фаз :
Из векторной диаграммы эти токи можно определить через активную составляющую тока потребителя :
и
Поэтому выражение (2,1) можно переписать в виде:
(2.2)
где а так выразим через мощность и напряжение поэтому (2.2). можем переписать так
(2.3)
Из которого можно определить искомое значение батареи конденсатора:
(2.4)
Обычно при помощи батареи конденсаторов компенсацию угла сдвига фаз осуществляют не полностью повышая до
Еще большее повышение требует больших затрат на установку батарей конденсаторов, которые в этом случае экономически не оправдаются:
В трехфазных потребителях имеем:
(2.5)
где - реактивно мощность компенсирующих устройств.
2.4. Транспортные задачи повышения качества электроэнергии и коэффициента мощности.
В транспортных задачах электроснабжения, таких как ограничение передаваемой мощности по существующим линиям с учетом допустимых нагревов её проводов, расчет передачи мощности через транспортные узлы и др., целевая функция представляет собой сумму произведений удельных стоимостей Zij на величины передаваемых мощностей Xij от узла I к узлу j:
(2.8)
где n, m- соответственно количество источников и количество потребителей.
Для оптимизации таких функций составляется транспортная матрица с применением симплекс-метода, распределительного метода и метод потенциалов. В электроснабжении особую роль играют критерии надежности и критерии качества электроэнергии.
В общем случае комплексные критерии оптимальности технических решений определяются на основе экспертных решений путем установления перечня математически формализованных свойств, подлежащих оценке. Например, для схемы компенсации реактивной мощности в перечень свойств можно включить: минимальность активных потерь в линиях с учетом возможных изменений напряжений в узлах потребителей, место и удобство обслуживания компенсирующих устройств с учетом возможности дальнейшего расширения системы электроснабжения при использовании существующих объектов, с учетом допустимых показателей надежности.
К числу количественных критериев оптимальности, определяющие целевые функции относятся: критерии, основанные на количественной оценке разности между истинным значением характеристики электроснабжения и её оценки.
Приведем несколько примеров.
Периодичность плановых предупредительных ремонтов, в системе электроснабжения с установкой УКРМ. Тпл служащие для технико – экономического обоснования правил технической эксплуатации оптимизируется обычно по критерию минимума ежегодных затрат и недоотпуска энергии:
(2.9)
где - суммарная стоимость предупредительных ремонтов; - суммарная стоимость видов аварийных ремонтов и недоотпуска электроэнергии;
- виды отказов, УКРМ характеризуемых интенсивностью. Выражение (2.9) однозначно соответствует критерию минимума удельных затрат:
(2.10)
где - параметр потока отказов; Тпл – периодичность предупредительных ремонтов; УКРМ - параметр потока видов отказов, аппроксимируемых функцией
(2.11)
Дифференцируя (5) по Тплj и приравнивая соответствующие частные произведения к нулю, получим условие оптимума по каждому Тплj:
(2.12)
Значение Тпл, удовлетворяющее условию (6) является оптимальным.
Особую группу составляют оптимизационные задачи при случайной исходной информации. К ним можно отнести, например, задачи расчетов мощности нагрузок, изменения напряжений в узлах эксплуатируемых систем электроснабжения, расчет оптимальной периодичности проведения профилактических ремонтов основного электрооборудования и др., решаемых методами статического программирования. В этих задачах случайные величины, являющиеся коэффициентами целевой функции, должны быть заменены их математическими ожиданиями с последующим получением детерминированного эквивалента целевой функции:
(2.13)
Если случайными величинами являются коэффициенты или , то, детерминированными эквивалентами -го ограничения будут соответственно выражения:
(2.14)
где значение стандартной случайной величина, вычисляемое по значению вероятности каждого ограничения.
Обобщенная целевая функция многокритериальных многопараметрических задач электроснабжения записывается следующим образом:
(2.15)
где zk – целевая функция, выражающая k-й критерий.
Zkнор – нормированное значение k-й целевой функции;
- коэффициент века k-й целевой функции;
S – количество принятых критериев.
Деленние zk на нормированное значение Zkнор приводит каждую целевую функцию к единым относительным единицам.
Решение многокритериальных задач не требует специфики по сравнению с однокритериальной задачей.
Решение выше приведенных систем выполняется известными методами вычислительной математики. При линейной системе используется метод Гаусса, а при нелинейной – метод Ньютона с помощью программного обеспечения Excel. 7.0.
2.5. Вопросы применения статических тиристорных компенсаторов
реактивной мощности на электроподвижном составе
Эффективным средством улучшения энергетических показателей электрической тяги однофазно – переменного тока является устройство компенсации реактивной мощности (УКРМ) с зонно – фазовым регулированием. Техническим результатом компенсации реактивной мощности потребляемой электровозом электроэнергии, является уменьшение потерь энергии, возникающих при прохождении реактивных токов и токов обратной последовательности; увеличение пропускной способности контактной сети; повышение и стабилизация уровня напряжения на шинах подстанции и вследствие этого улучшение качества напряжения у районных потребителей; увеличения скорости движения поездов и ускорение доставки грузов. Опыт применения УКРМ показывает, что вышеуказанные составляющие покрывают дополнительные капитальные затраты и на расходы, связанные с наличием незначительных активных потерь в УКРМ.
УКРМ, устанавливаемые на электроподвижном составе (Э.П.С.) [1], повышают коэффициент мощности и уменьшают тепловые потери:
(2.16)
где Р – активная мощности Э.П.С.; R – приведенное активное сопротивление сети.
Поэтому, учет сочетания потерь от применения УКРМ и повышения коэффициента мощности является важной задачей повышения энергетических показателей на современных Э.П.С.
Вопрос целесообразного применения вышеуказанных УКРМ связан со случайным характером тяговой нагрузки и ориентированием на максимально возможные токи, а не на наиболее вероятную область их значений с учетом достигаемого эффекта. Определение оптимальной экономической мощности вышеуказанных управляемых УКРМ целесообразно проводить путем сравнения с широко применяющимся типовыми нерегулируемыми компенсирующими устройствами (КУ) по средне – статическим характеристикам тяговой нагрузки, к которым относятся: Iл.ср – средний ток плеча, питающеюся от отстающей фазы; Iпр.ср - средний ток опережающей фазы; среднестатическое отношение токов плеч питания;
КЭI- коэффициент эффективности кривой тока тяговой нагрузки.
Снижение потерь мощности в питающей сети при включение нерегулируемых и регулируемых тиристорных УКРМ по [1,2,3] можно оценить по [4], по кривым отношений средних потерь мощности при компенсации к потерям мощности без компенсации соответственно для каждой из схем:
(2.17)
где потери мощности при отсутствии компенсации:
(2.18)
потери мощности при включении регулируемого УКРМ:
(2.19)
Кривые отношений , построенные с использованием формул (1) и (2.19) для устройств по [29, 30, 31] представлении на рис. 2.3. использование УКРМ по [29], работающая как в емкостном, так в индуктивном режимах, гарантирующий благоприятный баланс по расходу энергии вследствие перекомпенсации реактивной мощности, дает дополнительное снижение потерь мощности, характеризуемым кривой 3. Рис.2.3.
Расчет оптимального распределения заданной мощности конденсаторной батареи и места их установки с учетом характера нагрузки и влияния уравнительных токов с на тяговых подстанциях применением метода неопределенных множителей Лагранжа приведены [27].
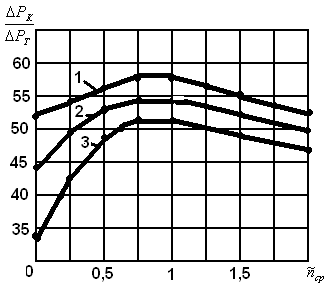
Рис. 2.3.
Очевидно, что экономическую эффективность регулируемых ИРМ, их оптимальную мощность и место установки следует определять в каждом конкретном случае с учетом характера нагрузки, влияния уравнительных токов, качества напряжения у районных потребителей. В первую очередь вопрос о целесообразности применения регулируемых источников реактивной мощности необходимо решать для участков неравномерностью и значительной величиной нагрузки.
Выводы по второй главе
1. Анализ методов поиска оптимума показывает, что в оптимизационных задачах электроснабжения целесообразно применять методы, диктуемые особенностями математической модели: например в транспортные задачах применять – симплекс – метод и распределительный метод; в технологических задачах режимов – линейного программирования; в задачах компенсации реактивной мощности – метод неопределенных множителей Лагранжа; в задачах прогноза выхода из строя систем электроснабжения с УКРМ электропотребления – метод Монте - Карло и методы случайного перебора.
2. Особенностями задач оптимизации электроснабжения в частности задачах компенсации реактивной мощности являются: применение как алгоритмических так и классических методов; необходимость системного подхода с учетом её развития; третье особенностью – при экономической оптимизации электроснабжения критерий надежности выступает в виде системы ограничения.
Глава 3.
Нелинейная оптимизационная задача компенсации реактивной мощности.
3.1. Методы оптимизации нелинейных задач электроснабжения
При технико – экономическом исследовании, заключающемся в экономическом обосновании принимаемых технических решений, необходимо иметь математическую модель, отражающую основные свойства и закономерности исследуемого объекта.
Рассматриваемые в данной работе математические модели элементов системы электроснабжения характеризуется не только физическими величинами, но и стоимостными показателями. Их можно назвать технико-экономическими моделями.
Ознакомимся с методикой получения моделей элементов систем электроснабжения с УКРМ.
А. Линия электропередачи (ЛЭП). Пусть имеем ЛЭП длиной l, км, и напряжением u, кв. Затраты на потери электроэнергии в линии З, т.руб/год. определяются, как известно, выражением [3]:
где S – передаваемая мощность, кВ.А;
F – сечение проводов, мм2;
Зэ – удельные затраты на компенсацию потерь электроэнергии,
сум/кВт.ч.;
p – удельное сопротивление материала проводов линии;
- время потерь, ч/год.
Рассматриваемый показатель зависит от ряда свойств ЛЭП, которые характеризуются соответствующими величинами. Каждая из этих величин с математической точки зрения может рассматриваться в качестве независимой переменной, получающей новое численное значение при изменении исходных условий. Изменение любой из этих величин приведет к образованию нового варианта и изменению затрат. Однако с экономической точки зрения существенным для изменения затрат оказывается изменение не отдельных величин, а их вполне определенные совокупности. Например, если уменьшились удельные затраты Зэ , а время потерь во столько раз увеличилось, то затраты Зэ – остаются неизменными.
Существенные величины, значения которых требуется обосновать в процессе решения технико-экономических задач, называются оптимизируемыми параметрами. Все же остальные величины, объединяем в обобщенные константы. Они характеризуют исходные данные решаемой задачи.
Например, если оптимизируемым параметром является сечение проводов F, то выражение (6) можно записать в виде
где
Если же оптимизируемыми параметрами будут величины F и u то выражение (7) примет вид:
Таким образом, в зависимости от характера решаемой задачи одна и та же величина может выступать то как константа, известная до решения задачи, то как оптимизируемый параметр, численное значение которого требуется экономически обосновать в процессе решения задачи. Так как в практических расчетах приходится учитывать не один эффект, а несколько, модель линии электропередачи усложняется. Например, если в качестве технико-экономической модели линии принять выражение приведенных затрат, с учетом поперечной и продольной компенсации то модель ЛЭП будет иметь вид [4]:
Здесь , сум./км, и , сум./км мм2, характеризуют соответствующие удельные затраты на строительство характеризуют соответствующие удельные затраты на строительство 1 км линии.
С увеличением сечения проводов затраты на строительство ЛЭП увеличиваются, а затраты на потери энергии снижаются, т.е. по сечению проводов в формуле затрат образуются конкурирующие группы эффектов. Само же сечение можно рассматривать в качестве оптимизируемого параметра, численное которого нужно определить на стадии анализа исследуемого объекта. Объединяя все величины, за исключением оптимизируемого параметра , в обобщенные константы отдельных эффектов в формуле (9), можно записать в виде
Это формула и рассматривается в дальнейшем как один из возможных вариантов обобщенной технико-экономической модели. В некоторых случаях в качестве оптимизируемого параметра также рассматривают u. В этом случае в качестве другой модели линии можно иметь в виду формулу
В этой модели два оптимизируемых параметра: сечение проводов F и напряжение линии u. По каждому из оптимизируемых параметров в модели имеются конкурирующие эффекты. Обобщенные константы и объединяют целую совокупность свойств отдельных эффектов исследуемого объекта, но не включают оптимизируемые параметры.
Рассмотренные технико-экономические модели (9), (11) справедливы для линии электропередач переменного тока напряжением до 110 кВ включительно. для линий напряжением выше 110 кВ необходимо применять более сложные модели, учитывающие большее количество эффектов, характерных для электропередач данного класса напряжений (например, корона).
3.2. Применение метода неопределенных множителей Лагранжа для выбора оптимальных параметров устройства компенсации реактивной мощности
В схеме электроснабжения контактной сети электрифицированной железной дороги следует распределить между узлами 1,2,3, соответственно с реактивными нагрузками Q1, Q2, Q3, заданную Q суммарную мощность компенсирующих устройств (см. рис. 1)
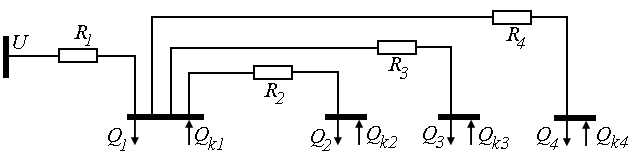
Рис. 1.
Напряжение схемы кВ. cсопротивления линий Ом; реактивные нагрузки узлов кВар;
Суммарная мощность компенсирующих устройств 500 кВар.
Критерием оптимальности в этой задаче является минимум потерь активной мощности:
(3.23)
где
Qi - реактивные нагрузки узлов, соответственно кВар.
Qki – устанавливаемые компенсирующие устройства
Минимум целевой функции ищется при ограничении источников реактивной мощности:
(3.24)
Абсолютный экстремум функции Лагранжа записывается в виде:
(3.25)
Минимальные значение этой функции определяются приравниванием к нулю производных по всем переменным:
(3.26)
Постановляя выражение из первого уравнения во второе, и третье получаем соответственно:
решая которое получите кВар;
откуда кВар. Из последнего уравнения системы (10) вычисляется кВар.
Множитель Лагранжа находится из выражения
(3.27)
Таким образом минимальные потери активной мощности в рассматриваемой схеме электроснабжения при ограничении суммарной мощности компенсирующих устройств составляет:
3.3. Задача оптимально передачи и распределения активной мощности в системе электроснабжение.
Одной из важных оптимизационных задач электроснабжения является задача распределения суммарной активной мощности потребителей энергосистемы между подстанциями этой системы. Рассмотрим эту задачу в общем виде для наиболее простого случая, когда в энергосистеме имеются только тепловые электростанции, работающие на одном виде топлива.
В существующей энергосистеме необходимо так распределять активную нагрузку между электростанциями, чтобы затраты на выработку передачу распределение электроэнергии были бы минимальными, а максимальным. Основной составляющей этих затрат является стоимость топлива. Поэтому в качестве минимизируемой целевой функции примем суммарный расход топлива в энергосистеме.
Пусть в энергосистеме имеется п тепловых электростанций. Для агрегатов каждой электростанции известны расходные характеристики, т.е. зависимости расхода топлива В от активной мощности Р; вырабатываемой станцией. Эти расходные характеристики имеют нелинейный характер и следующий общий вид:
(3.28)
Целевая функция будет представлять собой сумму таких нелинейных зависимостей
(3.29)
В энергосистеме должен соблюдаться баланс мощностей, в соответствии с которым сумма вырабатываемых станциями мощностей должна быть равна суммарной потребляемой мощности
(3.30)
Выражение баланса активной мощности (3.30) и является техническим ограничением в рассматриваемой оптимизационной задаче.
Граничными условиями будут неотрицательные значения искомых мощностей электростанций
. (3.31)
Соотношения (3.29), (3.30) и (3.31) представляют собой математическую модель поставленной оптимизационной задачи.
Для решения воспользуемся методом Лагранжа. Составим функцию Лагранжа
Для определения минимума функции Лагранжа вычислим все ее частные производные и приравняем их к нулю:
(3.32)
Из системы (2.23) следует, что она имеет решение при условии
(3.33)
и выполнении баланса мощности (3.30).
Выводы по третьей главе
1. В системах электроснабжения большинство задач являются нелинейными. К ним можно отнести задачи распределения мощности между подстанциями с учетом транзита мощности и нестационарными режимами перевозок; числа и мощности трансформаторов, сечений проводов, компенсирующих устройств; определение основных показателей электрической нагрузки; нахожождение рационального места расположения главной понизительной или главной распределительных подстанций; выбор схемы питания с учетом надежности.
2. Особое место занимают технико-экономические расчеты по оптимизации возможной реконструкции методов и средств компенсации реактивной мощности с использованием современных тиристорных компенсаторов реактивной мощности, являющиеся по постановке нелинейными оптимизационными задачами.
3. В работе показано, что наиболее целесообразным методом нахождения оптимальных параметров устройств компенсации является метод неопределенных множителей Лагранжа, позволяющая учитывать удельные затраты на установку, эксплуатационные – текущие затраты а также на их техническое обслуживание.
Глава 4.
Принцип работы тиристорного компенсатора.
4.1. Искусственный сдвиг с опережением получается в схемах с полупроводниковыми управляемыми вентилям - тиристорами.
Схема тиристорното компенсатора реактивной мощно�сти представлена на рис. 52. Он состоит из выпрямителя, выполненного по мостовой схеме на шести вентилях В1—В6, сглаживающего дросселя Др, на обмотки кото�рого замкнуты накоротко две группы вентилей выпрями�теля. Конденсаторная батарея Ск и тиристоры В10, В11 и В12 составляют узел искусственной коммутации. Тиристорный компенсатор работает следующим образом. При включении его
в вторичных обмотках трансформатора, включенных как обратные звезды, появляется напряжение. Обмотки всех шести фаз вторичной обмотки в порядке их чередования сдвинуты относитель� но друг друга на 60°.
В момент, когда напряжение на фазе А становится положительным, отпирается тиристор В1, т. е. на его управляющем электроде (схема управления на рис. 52 не
показана) появляется отпирающий импульс напряжения, затем поочередно отпираются тиристоры В2—В6 затем опять В1 и появляется выпрямленное напряжение.
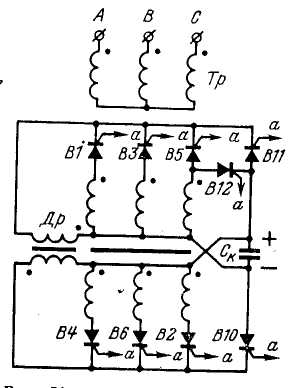
Рис. –Схема тиристорного компенсатора реактивной мощности.
Выпрямитель, замкнутый накоротко на сглаживаю�щий дроссель, при включении вентилей с опережением на угол, примерно равный 90°, работает как компенса�тор мощности.
В начальный период дроссель запасает энергию. В следующий момент времени получает отпирающий импульс тиристор В12 и происходит быстрый заряд кон�денсатора Си от фазы С. Далее отпирается коммутирую�щий тиристор В11 и гасит работающий в этот момент тиристор В1. Тогда ток, проходящий через обмотку дрос�селя Др, пойдет через тиристор В11.
В установившемся режиме генерирования реактивной мощности каждый из основных тиристоров В1—В6 га�сится поочередно с помощью тиристоров В10 или B11 в моменты времени, когда напряжение соответствующей вторичной обмотки положительно, и включается в моменты, когда данное напряжение отрицательно. При этом ток опережает фазные напряжения на угол, близкий к 90°. В описанной схеме коммутационная конденсатор�ная батарея Ск может быть в 3—5 раз меньшей мощно�сти, чем генерируемая тиристорным компенсатором. Разработаны и другие схемы компенсирующих устройств с искусственным сдвигом фаз между током и напряже�нием.
Полупроводниковым компенсирующим устройствам уделяется большое внимание по нескольким причинам. Во-первых полупроводниковые, в частности, тиристорные выпрямители и преобразователи частоты находят все большее применение в электроприводах, электротермиче�ских и других электроустановках, и они имеют часто низкий cos, т. е. являются потребителями реактивной мощности, между тем при определенных изменениях в их схемах некоторые из них можно использовать в качестве компенсирующих устройств, генерирующих реактивную мощность. Во-вторых, полупроводниковые устройства яв�ляются принципиально отличными от других потребите�лями или источниками реактивной мощности. Потребле�ние или генерация реактивной мощности осуществляется в них, как было описано, путем искусственного сдвига фаз между током и напряжением соответствующими коммутационными устройствами.
4.2. Расчетные соотношения и характеристики плавнорегулируемых вентильных компенсаторов реактивной мощности
Наряду с известными методами ступенчатого регулирования мощности батареи с изменением ее емкости переключением секций, а также подводимого напряжения в настоящее время считается перспективным использование плавнорегулируемых вентильных источников реактивной мощности [29,30,31,32,33,34]. Вентильный преобразователь может генерировать реактивную мощность как с индуктивным, так и с емкостным сдвигом. В последнем случае он работает в режиме статического компенсатора [26]. Использование в нем тиристоров с малым временем восстанов�ления управляемости позволяет сделать установку достаточно эконо�мичной. В тиристорном компенсаторе установленная мощность комму�тирующих конденсаторов оказывается в несколько раз меньшей, чем генерируемая преобразователем в сеть, что частично компенсирует дополнительные расходы на управляемые вентили и трансформатор, т. е. позволяет получить стоимость 1 квар реактивной мощности, со�измеримую с нерегулируемой батареей.
Вентильный источник реактивной мощности представляет собой замкнутый накоротко на сглаживающий дроссель выпрямитель, ра�ботающий с управляемым углом регулирования 90° эл. Режим компенсатора с опережающим углом регулирования возможен лишь с искусственной коммутацией тока в вентилях коммутирующими кон�денсаторами.
В лаборатории энергоснабжения Уральского отделения ЦНИИ МПС выполнены теоретические и экспериментальные исследования известных и вновь предложенных схем преобразователей, работающих в режиме компенсатора реактивной мощности. Описание этих схем, их особенности и первые результаты проверки на физической модели ранее подробно рассмотрены [25].
В настоящей статье приводятся результаты теоретического анали�за двух типичных разновидностей компенсаторов, на основании ко�торого установлены основные расчетные соотношения и закономерно�сти, присущие этим преобразователям.
Схемы компенсаторов разделим на две группы: в I группе искус�ственная коммутация осуществляется через анодную индуктивность с промежуточным переходом через дополнительный коммутирующий вентиль [23,24,25], во II группе искусственная коммутация происхо�дит практически мгновенно в контуре, не содержащем анодную ин�дуктивность, а для перезаряда конденсаторов используются допол�нительные отсекающие вентили [25,28].
Для анализа вентильных компенсаторов исходя из общепринятых допущений найдем расчетные соотношения, характеризующие основ�ные закономерности и параметры схем. Вначале рассмотрим общий случай компенсатора трехфазного тока со схемой I группы.
Одним из основных критериев при оценке преобразователей с искусственной емкостной коммутацией вентилей является коэффициент эффективности использования коммутирующего конденсатора
(4.1)
где Qr — реактивная мощность, генерируемая преобразователем в
сеть;
Qc — мощность коммутирующих конденсаторов, т. е. реактивная мощность, отдаваемая конденсаторами при их непосредственном подключении к сети.
Примем коэффициент трансформации равным единице, тогда зна�чение Q,. по первой гармонике тока компенсатора (рис. 4.1, б):
(4.2)
где m1 — число фаз питающей сети (первичной обмотки
трансформатора);
Ua и Id — фазное анодное напряжение и выпрямленный
ток компенсатора;
— угол сдвига фаз между первой гармоникой тока и
напряжением, зависящий от соотношения приведенных
анодного индуктивного ха и анодного активного
сопротивлений . В реальных схемах 90° эл;
— длительность работы основного вентиля;
к' — доля первой гармоники в полном первичном эффектив�ном токе;
к10,95 0,96.
Величину Qc можно найти по общеизвестному выражению для мощности конденсатора , с учетом работы коммутирующих конденсаторов в схеме компенсатора под действием напряжения, ве�личина и частота которого отличны от сетевых [34]:
(4.3)
где — угловая частота сети;
Ск — коммутирующая емкость;
Кк — коэффициент превышения максимальным
напряжением на конденсаторе амплитуды фазового
анодного напряжения;
кратность частоты fк основной гармоники напряжения на
коммутирующем конденсаторе по отношению к частоте сети.
Для трехфазных схем пс = 3, для одно�фазных I группы — пс =2;
кв.г - коэффициент высших гармоник, учитывающий содер�жание в токе коммутирующего конденсатора высших гармонических с частотой, кратной fк .
Коэффициент превышения максимальным напряжением на кон�денсаторе амплитуды фазового анодного напряжения
где — максимальное напряжение на конденсаторе.
Величину Ск, входящую в выражение (3), определяют исходя из минимально допустимого угла ст, предоставляемого на восстановление управляемости основных вентилей [23,245, 6]. В соответствии с рис. 4.1, в можно записать
(4.4)
С учетом прямолинейной коммутации
(4.4а)
где — угол от точки перехода через нулевое значение анодного
напряжения, подключенного к заканчивающему свою работу
вентилю, и до точки очередной естественной коммутации.
Для однофазных схем = , для трехфазных
|
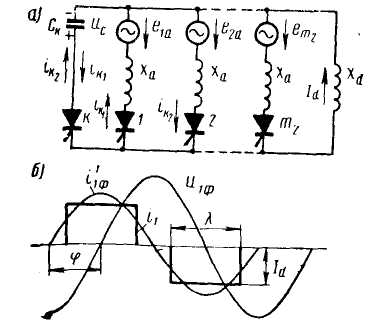
Рис. 4.1. К выводу расчетных соотношений в схемах 1 группы:
1,2,… m2-основные вентили; К-коммутирующий вентиль
|
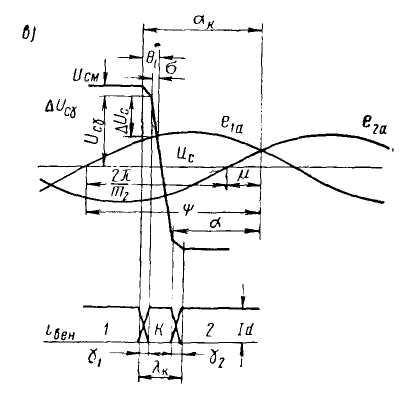
|
С учетом (4) и (4а) получим конечную формулу для коммутирующий емкости
(4.4.б)
Найдем углы коммутации и , необходимые для вычисления Ск а также для определения других характеристик схемы. Процесс ком�мутации на участке описывается следующим выражением (рис. 4.1, а):
(4.5)
где — анодная э. д. с.
При прямолинейной коммутации с допущением о неизменности напряжения uc на участке .
(4.5a)
Тогда первый угол коммутации, принимая питание от системы бесконечной мощности и с учетом будет
(4.5,б)
Аналогично с теми же допущениями, из уравнения коммута�ции на участке .
(4.6)
где - угол от точки перехода через нулевое значение анодным на�пряжением вентиля, вступающего в работу, до точки очеред�ной естественной коммутации. Для однофазных схем =0, для трехфазных
— напряжение короткого замыкания трансформатора, %.
Окончательное выражение для коэффициента эффективности полу�чим подстановкой в (1) значения Qr и Qc из (2) и (3) с учетом Ск по (4.46)
(4.7)
Для вычисления Кэф, Ск, углов , и др. необходимо знать длительность работы основного вентиля , а также углы регулировния оск на, точные значения которых могут быть найдены лишь после расчета указанных определяемых величин. В связи с этим расчет схемы и уг�лов регулирования ведется методом последовательного приближения, беря за исходные величины значения н и кн, которыми можно зада�ваться с достаточной точностью, исходя из выбранной схемы компен�сатора и числа фаз вторичной обмотки трансформатора тг. Для полу�чения хорошей сходимости достаточно двух попыток.
В связи с этим необходимо установить соотношения между углами ак, к , к. Эти соотношения легко выводятся из рассмотрения ли�нейных диаграмм (см. рис. 4.1), а именно:
и
При предварительном вычислении углов и по к значениями 1 и 2 можно пренебречь.
В свою очередь величина угла к, характеризующего длительность работы коммутирующего вентиля, т. е. время перезаряда емкости Ск, определится из рассмотрения рис. 4.1, в. Из общего выражения для за�ряда емкости, полагая коммутацию прямолинейной, можно записать
(4.8)
После преобразований с учетом Ск по (46) и пропорциональной зависимости от Id
(4.8а)
Полученные соотношения, характеризующие в общем виде основ�ные закономерности в схеме компенсатора I группы с коммутацией через анодную индуктивность, позволяют проанализировать влияние параметров отдельных его элементов на эффективность установки, а также сравнить различные схемы. С этой точки зрения прежде всего представляет интерес анализ коэффициента эффективности.
В соответствии с выражением (4.7) число фаз питающей сети влияет на Кэф. Это влияние можно представить коэффициентом Так как Для трехфазных схем т1 = пс = 3 и , а для однофазных и , то величина а, пропорцио�нально которой изменяется Кэф, будет равна в случае трехфазной схемы 0,709, а в однофазной — 0,407. Отсюда ясно, что для трехфазных схем коэффициент эффективности не менне чем в 1,75 раза выше, чем для однофазных.
Анализ выражения (4.7) показывает, что основное влияние на Кэф оказывает время, предоставляемое на восстановление управляемости вентилей , и анодная индуктивность, связанная с углом коммутации 1. Поскольку величина 1, входящая в 1 под знаком синуса, ока�зывает незначительное влияние, можно считать, что Кэф изменяется обратно пропорционально сумме Более сложно на Кэф влияет коэффициент КС. Для выяснения оптимальных значений Кс на рис. 4.2 представлена зависимость Кэф = f(Kc), из которой следует, что мак�симальное использование емкости достигается при Кс = 1,82,0. Поскольку увеличение Кс приводит к росту напряжения на вентилях и других элементах схемы, необходимо принимать его равным 1,6-1,8. Рассчитанные по выражению (4.7) с учетом Yi п0 уравнению (4.5.б) для и зависимости номинального коэффициента эффективности от ик для различных значений о при�ведены на рис. 3. Для реальных индуктивностей с ик = 7,510% в трехфазных схемах можно получить КэфН на уровне 4—3 при =3060 мксек. Это соответствует времеи выключения тиристоров 25—50 мксек, что реально на перспективу. На вентилях ВКДУ в на�стоящее время в этом диапазоне ик можно ожидать Кэф = 2,52,0 в трехфазных схемах и соответственно 1,41,1 - в однофазных.
Естественно, что регулирование и уменьшение генерируемой ре�активной мощности приводит к снижению Кэф. Из выражения (4.7) ясно, что это снижение идет пропорционально . Темп снижения Кэф усиливается также за счет уменьшения вместе с Id.
Особый интерес представляют регулировочные характеристики
коменсатора. Верхний предел регулирования при выбранных параметрах
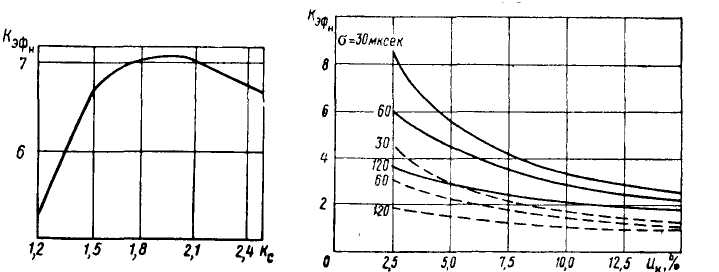
|
Рис. 4.2. Зависимость коэффициента эффективности от напряжения на кон денсаторах:
|
Рис. 4.3. Влияние анодной индуктивности и времени выключения тиристоров на эффективность схем I группы:
------трехфазная мостовая, ----- однофазная нулевая
|
элементов схемы во всех случаях ограничивается временем выключе�ния тиристоров, в то время как нижний — продолжительностью пере�заряда конденсатора, равной дли�тельности работы коммутирующего вентиля. При расчете схемы верхний предел регулирования гарантируется выбором коммутирующей емкости, соответствующей заданному номи�нальному току и обеспечивающей необходимое время на восстановле�ние управляемости вентилей. В этих условиях представляет интерес воз�можная глубина регулирования «вниз»,
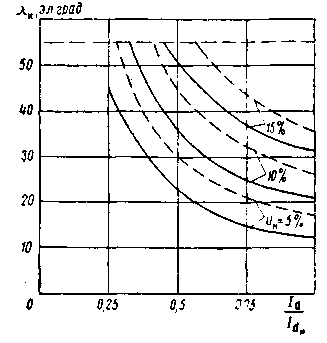
Рис. 4.4.
связанная с углом к. Поскольку однофазных схемах этот фактор не является лимитирующим, то нижний предел регулирования проанализируем на примере трехфазной мостовой схемы. Для шестипульсовой схемы к не должен быть более 60° эл и критерием, ограничивающим снижение тока Id, является к < 60° эл. Для указанных выше усло�вий по выражению (8а) вычислены зависимости для ряда значений ик и о. Эти зависимости представлены на рис. 4.4. Они пока�зывают, что и с точки зрения расширения предела регулирования также необходимо применение схем с относительно небольшими Lа., и тиристоров с малым временем выключения. Вместе с тем даже для трехфазных схем при Кс=1,8 и реальных индуктивностях можно обеспечить регулирование в пределах (1,00,25) IdH при мксек, что вполне достаточно. Если согласиться с более сложным законом регулирования при Кс=var, то необходимый нижний предел Id можно получить и при мксек.
Возьмем теперь однофазный нулевой вариант схемы II группы (рис. 4.5,а). Исходные выражения (4.1)-(4.3) справедливы и для этой схемы. Принципиальное отличие здесь, кроме мгновенной коммутации тири�сторов 1-2, заключается в том, что напряжение на конденсаторе из�меняется с частотой сети (пс = 1) и продолжает существенно расти в процессе коммутации отсекающих диодов 1'—2' следовательно, коэффициент Кс, входящий в выражение (3), не остается постоянным, как в предыдущем случае, а зависит от продолжительности коммута�ции диодов y', т. е. от анодной индуктивности.
В соответствии с рис. 4.5. б для прямолинейной коммутации и пола�гая эл, можно записать
(4.9)
Угол найдем из уравнения коммутации
(4.10)
При этом
(4.10а)
и с учетом мгновенное значение коммутирующего напряжения
(4.10б)
После подстановки выражения (106) в выражение (10) и двойного интегрирования с учетом начальных условий
(10 в)
следовательно, угол коммутации диодов не зависит от нагрузки, а определяется полностью частотой питания и параметрами контура
Подстановкой в выражение (9) значения из уравнения (10в) после преобразований определим
(4.11)
и соответственно
(4.11а)
Значение Ск можно найти по допустимому времени разряда кон�денсатора, равному времени, предоставляемому на восстановление управляемости (см. рис. 5, б):
(4.12)
откуда
(4.12а)
Подстановкой в выражение (4.1) значений Qr из уравнения (4.2) и QС из (4.3) с учетом (4.12а) коэффициент эффективности для однофазной ну�левой схемы с отсекающими диодами
(4.13)
Для определения величин Ск и КэФ нужно знать значения Кс, который в свою очередь зависит от Ск. Однозначное определение коэффициента Кс становится возможным после подстановки в вы�ражение (4.11а) значения Ск из (4.12а) и с учетом этого можно получить квадратное уравнение
(4.14)
действительный корень которого позволяет определить Кс в зависи�мости от ик и
(4.14а)
Рассчитанная по уравнению (14а) при к' ==0,9 и = 314 зависимость
Кс =f (uк, ), приведенная на рис. 6, показывает, что в области реальных uK>2,5% напряжение на емкости растет линейно с индуктивностью и снижается по мере увеличения . В соответствии с
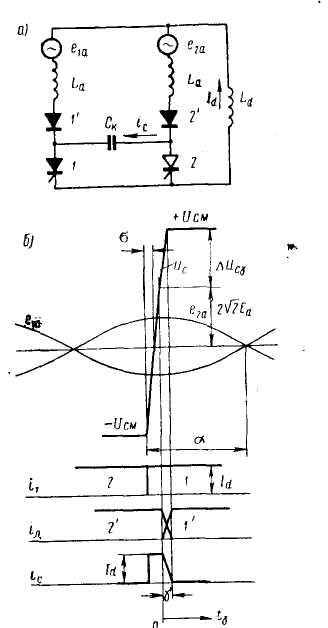
|
Рис 4.5.. К вводу расчетнх соотношений в схемах II группы:
1,2 – тиристоры; 1, 2 – отсекающие диоды
|
этим выражением (4.12а) рост uк приводит к уменьшению величины коммутирующей емкости, однако, как это следует из уравнения (4.13) и
зависимостей , рассчитанных для , и коэффициент эффективности при этом снижается.
Таким образом, оба типа схем имеют идентичный характер зависимостей Кэф от ик и . Но, как видно из сопоставления однофазных компенсаторов, схемас отсекающими диодами при одинаковых условиях, обладает значительно большим коэффициентом эффективности, значения которого превышают в два раза Кэф трехфазных и почти в четыре раза однофазных схем I группы. В то же в время в схеме II группы с отсекающими диодами даже при наличии тиристоров с малым временем выключения затруднена реализация режимов с < 120 мксек в с резким возрастанием при этом значений танием при этом значений Ас и, следовательно, напряжения на тиристорах и других элементах установки, тогда как в схемах I группы с коммутирующими вентилями величина не зависит от а определяется лишь выбором разности углов регулирования. С этой точки зрения для схемы с отсекающими диодами с учетом стоимости не только конденсаторов, но также вентилей и других элементов существует оптимальная величина ниже которой следует ожидать возрастания стоимости 1 квар мощности компенсатора.
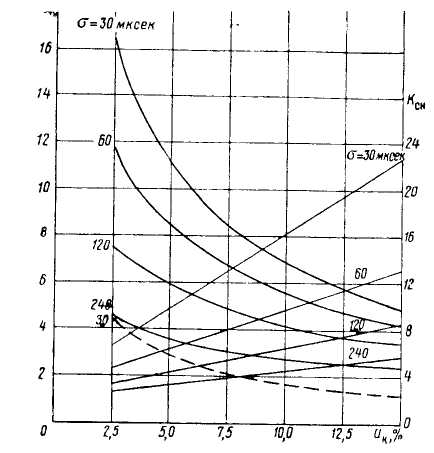
Рис. 4.6. Характеристики однофазной нулевой схемы II группы с отсекающими диодами.
Суммарные капитальные затраты на оборудование и монтаж вентильного вание и монтаж вентиль�ного компенсатора Зк слагаются из затрат на конденсаторы Зкоп, вентили Зв, трансформатор Зтр) сглаживающий реактор Зр и прочие затраты Зпр, включающие расходы на монтаж, коммутационную ап�паратуру, схему управления и т. д.:
Зк = 3кон + 3В + Зтр + Зр+ 3пр. (4.15)
Выбор величины о существенно влияет лишь на первые две состав�ляющие правой части выражения (4.15), а три последних члена при задан�ной мощности установки являются величиной постоянной и при ана�лизе опт могут быть исключены. Тогда суммарная удельная стоимость конденсаторов и вентилей в расчете на 1 квар генерируемой реактивной мощности с учетом Qг по выражению (2)
(4.16)
Для рассматриваемой однофазной схемы с отсекающими диодами при я и к 1 удельная стоимость
(4.16а)
Конденсаторов руб/квар и их установленной мощности Qc, опре�деляемой в соответствии с выражением (3), с учетом С,, по (12а)
(4.17)
Расходы на вентили слагаются из стоимости тиристоров и отсека�ющих диодов, которые могут быть определены как произведение стоимости соответствующих типов вентилей вентиль на их количество
(4.18)
где п и а—соответственно число последовательно и параллельно соединенных тиристоров и диодов в плече.
Выводы по четвертые главе
Сравнительная простота и надежность схема тиристорных регулируемых компенсаторов реактивной мощности с отсекающими диодами в пусковых и стационарных режимах, устойчивость регулирования, а также высокий коэффициент эффективности Кэфф. позволит считать эту схему перспективной для использования в КРМ.
Заключение
1. В связи установившимися рыночным отношениями, освоением современных методов и технических средств в электроэнергетике в частности в системе электроснабжения электрифицируемой железной дороги, имеющий резко переменное значение нагрузки как во времени так и в пространстве, актуальное значение имеет применение оптимизационных методов расчета параметров и места установок устройства компенсации реактивной мощности и учетом наиболее целесообразного варианта использования на основе всестороннего анализа технических и экономических показателей.
2. В результате оптимального выбора параметров устройств компенсации реактивной мощности уменьшаются потери энергии, возникающие при прохождении реактивных токов и токов обратной последовательности; увеличивается пропускная способность контактной сети повышается и стабилизируется уровень напряжения на шинах подстанции и вследствие этого улучшается качество напряжения у районных потребителей; увеличивается скорости движения поездов и ускорение доставки грузов.
3. Сравнительная простота и надежность схема тиристорных регулируемых компенсаторов реактивной мощности с отсекающими диодами в пусковых и стационарных режимах, устойчивость регулирования, а также высокий коэффициент эффективности Кэфф. позволит считать эту схему перспективной для использования в КРМ.
4. Особое место занимают технико-экономические расчеты по оптимизации возможной реконструкции методов и средств компенсации реактивной мощности с использованием современных тиристорных компенсаторов реактивной мощности, являющиеся по постановке нелинейными оптимизационными задачами.
5. В работе показано, что наиболее целесообразным методом нахождения оптимальных параметров устройств компенсации является метод неопределенных множителей Лагранжа, позволяющая учитывать удельные затраты на установку, эксплуатационные – текущие затраты а также на их техническое обслуживание.
Список использованных литератур
1. И.А. Каримов. Обеспечить поступательное и устойчивое развитые страны – важнейшая наша задача. Ташкент., 2009, 72 с.
2. И.А. Каримов По пути модернизации страны и устойчивого развития экономики. Ташкент.2010 – 80с.
3. Справочник по проектированию электроэнергетических систем. /Под ред. С.С. Рокотяна и Шапыра. Москва, Энергоиздат 1989.
4. Воронин А.А., Мишин С.П. Оптимальные иерархические структуры. М.: ИПУ РАН, 2003-210 с.
5. Применение цифровых вычислительных машин в электроэнергетике. /Под.ред. О.В. Шербачева. –Л.: Энергия, 1980.
6. Авакумов В.Г. Постановка и решение электроэнергетических задач исследования операции. –Киев: Выща школа, 1983.
7. Модели и методы оптимизации развития энергосистем. Арзамасцев Д.А., Липес А.В., Мызин А.Л.-Свердловск, 1976.
8. Методология установления норм на электрические параметры полупроводниковых приборов./ВВ. Ведерников, В.М. Дроневич, Н.Н. Горюнов - Электронная техника. Сер 8, 1978, вып. 2(20).18с.
9. Баркалов С.А., Бурков В.Н., Новиков Д.А., Шульженко Н.А. Модели и механизмы в управлении организационными системами. М.: Изд. Тульский полиграфист», 2003. Том 1.-560 с. Том 2., 380.
10. Баркалов С.А., Бурков В.Н., Курочка П.Н. Образцов. Задачи управления материально техническими снабжением в рыночной экономике.
11. Бурков В.Н., Багатурова О.С., Иванова С.И. Оптимизация обменных производственных схем в условиях нестабильной экономики. М.: ИПУ РАН, 1996-48 с.
12. Курицкий Б.Я. Поиск оптимальных решений средствами ЕXCEL 7.0-СПБ.: ВHV-Санкт-Петербург, 1997.
13. Оптимизация радиоэлектронной аппаратуры. Под.ред. проф. А.Я. Маслова. М.: Радио и связь. 19982.
14. Ю.Б. Гук. Теория надежности в электроэнергетике. Ленинград.: Энергоатомоиздат. 1990. 207 с.
15. Бурков В.Н., Горгиа И.А. Ловецкий С.Е. Прикладные задачи теории графов. Тбилиси.: Мацниереба, 1974-234 с.
16. Монсеев Н.Н. Методы оптимизации. М.: Наука, 1978.-351 с.
17. Демидович Б.П., Марон И.А. Основы вычислительной математики. –М.: Наука, 1970-664 с.
18. Воробьев Л.М. Воробьева Т.М. Нелинейные преобразования в прикладных вариационных задачах. –М.: Энергия, 1972,-208с.
19. А.В. Котельников, А.В. Наумов, А.А. Наумов, Е.Э. Закиев, Оптимизация параметров цепей обратного тока тягового электроснабжения в уcловиях интенсификации движения и повышения весовых норм поездов. Вестник ВНИЖТ, №1, 2006.
20. Правила устройства электроустановок М.: Атомиздат 1980, 464 с.
21. Мамошин Р.Р. Повышение качества электроэнергии на тяговых подстанциях дорог переменного тока М.: Транспорт, 1973.
22. К.Г. Марквардт. Электроснабжение электрифицированных железных дорог. Москва.: «Транспорт» 1982.
23. Герман Л.А. Определение области применения регулируемых и регулируемых батарей поперечно емкостной компенсации на тяговых подстанциях переменного тока. Расчет на надежность электронных устройств. М.: Транспорт 1968, с 127-139. труда МИИ ж.д. транспорта. Вып. 261.
24. Мамошин Р.Р. Применение трехфазных регулируемых источников реактивной мощности на электрифицированных участках переменного тока. В КН. Вопросы электроснабжения Эл. Железных дорог. М.: «Транспорт», 1969 с 19-31. труды МИИТ Вып. 302.
25. Бобров Е.Г. хемы и характеристики статических вентильных компенсаторов реактивной мощности. В сб. Совершенствование методов эксплуатации локомотивов и устройств электроснабжения Свердловск, Ср-Уральское изд-во 1969, с. 137-146.
26. Марквардт К.Г. Электроснабжение электрифицированных железных дорог. Москва: «Транспорт», 1982, 528 с.
27. Якубов М.С. Ташев Б.К. Методология оптимизационного подхода к задачам электроснабжения. Ташкент, ТГТУ. ж. Ресурсо и электроснабжение. №1, 2012.
28. Ташев Б.К. Расчет оптимальных параметров устройства компенсации реактивной мощности. Материалы научно-технической конференции молодых ученых ТашИИТ. 2011.
29. Патент Р.Ф. №RU 228295. Способ управления компенсатором реактивной мощности и устройство его реализующие Кашарин В.В. (RU) ; Никонов В.В. (RU); Солтус К.П. (RU).
30. Патент Р.Ф. № RU 2187185. Способ управления компенсатором реактивной мощности.
31. Патент Р.Ф. № RU 2187872. Способ управления компенсатором реактивной мощности.
32. . Патент Р.Ф. № RU 2212086. Способ управления компенсатором реактивной мощности.
33. Бобров Е.Г. Расчетные соотношения и характеристики правно регулируемых вентильных компенсаторов реактивной мощности Москва. Труды ЦНИИ МПС, Вып №419.
34. Мамошин Р.Р. Исследование возможности оптимизации качества энергии на шинах тяговых под станций переменного тока с помощью однофазных регулируемых батарей. В кн. Вопроса энергосбережения электрических железных дорог. Труда. МИИТ. Вып. 340. Москва 1978.
35. Т.М. Кадыров, И.Х. Сиддиков. Оптимальный выбор параметров и проектирование систем электроснабжения. Ташкент, ТашПИ. 1987.
36. Якубов М.С., Ибрагимов Р.И. Вопросы применения статических тиристорных компенсаторов реактивной мощности на электроподвижном составе. Материала научно технической конференции, посвященная 80-летия ТашИИТ Ташкент. 2011.
37. Справочник по электроснабжению промышленных предприятий. М:Энергия, 1970, 57 с.
38. Шербачев О.В. Применение цифровых вычислительных машин в электроэнергетике. – Л.: Энергия, 1978, 200 с.
39. Гордиевский И.Г., Лордкипанидзе В.Д. Оптимизация параметров электрических сетей. –М. Энергия, 1978, 144 с.
40. Лебедев А.И. и др. Вероятностные методы в инженерных задачах. Справочник Санкт-Петербургское отделение Энергоатомиздат, 2000.
41. Арзамасцев Д.А. и др. Модели и методы оптимизации развития энергосистем, Свердловск «Энергоатомиздат».: 1976, 230 с.
42. www.Uzbekistan.uz
43. www.bilim.uz
п р и л о ж е н и я
Приложение
Общие сведения об Excel
Материал приложений рассчитан на пользователя, знакомого с основами работы в Excel. Напомним лишь некоторые основные моменты. Общий вид электронной таблицы показан на рис. П.1. В верхней части таблицы указано имя файла, с которым работает пользователь (Книга 1), ниже располагается главное меню (Файл, Правка, ... Сервис, ...), далее - панель инструментов, строка ввода и рабочее поле электронной таблицы
Рабочее поле состоит из строк (1, 2, 3, ...) и столбцов (А, В, С, ...). На пересечении строк и столбцов находятся рабочие ячейки. Каждая ячейка таблицы имеет свой адрес, например Л1,54, С7, ...
В рабочие ячейки заносится различная информация:
текстовая или комментарии (слово «задача» в ячейке В2; комментарий «Z=» в ячейке ВЗ);
цифровая (число «7,34» в ячейке С6; число «12,5» в ячейке D6);
вычислительная.
Рассмотрим подробнее вычислительную информацию. Вычисления могут выполняться по различным выражениям,, как с числами, так и с содержимым рабочих ячеек.
В ячейку F4 занесено выражение «=5,3+3,5*2». Это выражение автоматически вьиисляется и в ячейке F4 приводится результат (12,3).
В ячейку F6 занесено выражение «=C6+D6». Это выражение автоматически вычисляется и в ячейке F6 приводится результат суммы содержимых ячеек С6 и D6 (19,84).
В ячейку Е2 занесено выражение «4,5-С6». Это выражение автоматически вычисляется и в ячейке Е2 приводится результат разности между числом 4,5 и содержимым ячейки Св. Этот результат равен -2,84.
Таким образом, после внесения в рабочую ячейку вычислительной информации внешний вид ячейки и ее содержание отличаются по виду. Внешний вид отражает результат вычислений, а содержание - вычисляемое выражение.
Содержимое любой ячейки можно просматривать, изменять и удалять. Для этого к ячейке мышкой подводится курсор, и после нажатия левой кнопки мышки (МЛ) ячейка выделяется. Содержимое ячейки отражается в строке ввода. На рис. П.1 в строке ввода показано содержимое ячейки Е2.
Для исправления или удаления содержимого ячейки мышкой вводится курсор в строку ввода, МЛ курсор фиксируется на нужном месте и с клавиатуры компьютера вводится исправление или удаление содержимого ячейки.
Последовательность операций при решении оптимизационных задач с помощью программного обеспечения Excel следующая [1]:
1. Размещение комментариев и исходной информации в ячейках
рабочего поля.
2. Вызов из главного меню МЛ команды «Сервис»; из
содержания этой команды вызвать МЛ команду «Поиск решения»; на
экране появляется диалоговое окно «Поиск решения»; в это
диалоговое окно вводится исходная информация (адрес ячейки
целевой функции, вид экстремума целевой функции, адреса ячеек
искомых переменных, ограничения).
PAGE 3
Оптимизационные методы компенсации реактивной мощности системы электроснабжения железной дороги